EP2263964A2 - Montagefahrzeug für Glas- bzw. Solarmodule - Google Patents
Montagefahrzeug für Glas- bzw. Solarmodule Download PDFInfo
- Publication number
- EP2263964A2 EP2263964A2 EP10006405A EP10006405A EP2263964A2 EP 2263964 A2 EP2263964 A2 EP 2263964A2 EP 10006405 A EP10006405 A EP 10006405A EP 10006405 A EP10006405 A EP 10006405A EP 2263964 A2 EP2263964 A2 EP 2263964A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- handling device
- vehicle according
- working arm
- solar modules
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/68—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles mounted on, or guided by, jibs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0212—Circular shape
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0237—Multiple lifting units; More than one suction area
- B66C1/0243—Separate cups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
- B66F9/181—Load gripping or retaining means by suction means
Definitions
- the invention relates to a mounting vehicle for glass or solar modules according to the preamble of claim 1.
- the invention has set itself the task of providing a mounting and maintenance vehicle for solar modules, which carries out a transport, handling and installation of solar modules cost-effective, efficient and safe.
- maintenance in particular, could be facilitated and simplified for solar modules installed in large solar parks to obtain the maximum performance.
- the invention is characterized by the features of claim 1.
- the invention relates to a vehicle, in particular for the provision and installation of glass plates or solar modules, which a chassis for locomotion, a drive for providing drive energy, a control console, a floor or cargo area and a working arm with at least one boom and a torsionally stable swivel arranged handling device at one end, wherein the working arm is attached at a second end on the floor or loading area and the attachment comprises means for performing a rotational movement about an axis perpendicular to the stand or loading area standing axis.
- the invention is characterized in that the handling device is supplied by the drive with energy, preferably with electrical energy and / or hydraulic pressure and / or pneumatic pressure, in particular vacuum and in the handling device a multi-axis rotary head is preferably provided with at least one tool holder.
- the assembly vehicle can be used as a self-propelled vehicle be formed, which is formed with an internal combustion engine or with an electric motor.
- a vacuum suction device for handling solar modules or a maintenance device, preferably a cleaning device, can be arranged on the handling device.
- An energy supply to the handling device by the drive has the advantage that no additional energy supply means in the region of the handling device, such as batteries must be arranged, which reduces the overall weight of the handling device and its complexity overall. In addition, the freedom of movement of a handling device according to the invention is increased.
- the supply of the vacuum suction device with vacuum from the vehicle is carried out by means of a vacuum line extending from the vehicle, whereby the arrangement of a vacuum pump in the region of the handling device is not required.
- the arrangement of a vacuum generating device, which is powered by the drive with energy to the handling device increases in an individual case, the freedom of movement of the handling device, since no additional tubing and complicated vacuum feedthroughs are required.
- the attachment of the handling device by means of a torsionally stable suspension to the working arm which can also be designed as a lifting device, in particular as oscillating on a crane jib and deflectable by means of a hydraulic or pneumatic Antriebszylznders arm, provides an improved exact positioning possibility.
- this robust and simple mechanism provides high availability with low maintenance requirements.
- the Handling device is formed telescopic.
- a vertical offset can also be achieved directly via the handling device, and in combination with the pendulum suspension various angle ranges and radii are adjustable.
- a multi-axis rotary head is provided in the handling device.
- the multi-axis turret is preferably located at the end between the torsionally stable suspension and the handling device with the vacuum cups. The multi-axis turret ensures pivoting and rotation of the handling device.
- the means for carrying out a rotary movement have an endless rotary guide with a rotation range of 360 °.
- At least one support and / or leveling device is provided for stabilizing and / or leveling a standing position of the vehicle, wherein the support and / or leveling device at least one shield and / or at least one boom with backup plates includes.
- a dozer blade arranged below the loading area on the vehicle frame can at least partially level the ground beneath the vehicle by moving the assembly vehicle.
- a support wheel arranged underneath the vehicle loading surface and / or lateral support arms serve to support the vehicle when the telescopic stand or the telescopic boom have assumed their maximum extension position or height position.
- the invention is characterized in that the standing or loading area means for receiving, holding and securing glass plates or solar modules, in particular in a support frame.
- the attachment of the working arm and / or the standing or loading area has means for carrying out a pivoting movement about a parallel to the stationary or loading area and perpendicular to the axis of rotation extending axis as a slope compensation.
- the entire device is articulated laterally on the bed of the vehicle and can be brought by arranged lifting means in a vertical position with respect to the mounting frame of a solar module. This ensures safe transport and accurate installation of a solar module. It can also be provided a slope compensation for pivoting the cargo area, the lifting device and the provision device relative to a chassis.
- the loading area, as well as the lifting device and a supply device for solar modules to be mounted are articulated such that they are independently pivotable for a slope compensation. This allows a greater degree of freedom with respect to the orientation of a solar module relative to the mounting frame.
- the invention is characterized in that the working arm is formed hollow profile parts, wherein the hollow profile parts preferably between joints of the working arm have internal cable guides for electrical and / or hydraulic and / or pneumatic and / or vacuum lines.
- the working arm comprises telescopic elements, preferably cantilevers.
- the element may for example be formed from a tube-in-tube system, which allows a simple vertical displacement of the telescoping element.
- This has the advantage that the assembly vehicle during transport to a mounting location of solar modules can reduce the lifting device to a height that allows unhindered driving through, for example bridge passages.
- a telescopic stand is adaptable to different heights of mounting frames for solar modules.
- the boom which may be formed as a telescopic boom, allows mounting of solar modules to hard-to-reach mounting frames. Overall, these structural measures increase the flexibility of assembling a solar module without significant renouncement of safety-relevant aspects.
- the tool holder on the handling device at least one vacuum sucker preferably receives or carries an arrangement of vacuum cups as a tool and / or at least one cleaning device as a tool.
- a brush, a washing device or a compressed air device is arranged on the tool holder as a maintenance or cleaning device, wherein preferably a cleaning liquid-storing tank is provided on the loading surface.
- Solar modules on whose surface dust is deposited, or which are contaminated by weather conditions, can be cleaned via these maintenance devices, the different tools are used for different impurities.
- the assembly and maintenance of solar modules with a vehicle according to the invention is preferably carried out in large solar parks, in which the modules are placed near the ground along rows.
- the aisles between the rows are often narrow because the surface utilization is optimized for energy yield.
- the vehicle according to the invention can be constructed adapted to the aisle width, or optionally provide improved mobility with an adjustable track width.
- Advantageous is the flexible use as an assembly and maintenance vehicle, which can be used in the construction, maintenance and replacement of solar field.
- FIG. 1 an inventive assembly vehicle 1 with a caterpillar drive 2.
- the caterpillar 2 carries a standing or loading area 3.
- At a front end 4 and a rear end 5 each have a dozer blade 6 and 7 and supports 8 and 9 are arranged with backup plates.
- Corresponding supports are arranged on the other side of the machine (not shown here).
- the supports can be designed as hydraulically, pneumatically or manually operated telescopic supports.
- the leveling plates as well as the supports can stabilize the entire vehicle in a working position, so that required action radii can be operated.
- auxiliary modules a) to d) (only in Fig. 1 shown)), wherein a pallet fork with lifting hydraulics a), a Erdramme for the introduction of scaffolding supports b), a generator for luminous flux for night work c) and a trailer hitch for a correspondingly constructed transport trailer, for example, for more solar modules d) call ,
- a control station 10 is provided, wherein the vehicle can also be designed to be complementary or only automated or remotely controlled.
- base 11 In the area in front of the control station 10 is base 11, which has a lifting cylinder 12 a pivotable plane 13. This level compensates for any slope when using the assembly vehicle.
- Corresponding guides 14 are provided at the edge regions of the plane 13.
- a rotor 15 is arranged, which forms the base attachment of the working arm 16.
- the rotor is designed as an endless rotary guide, which has a Turning range 17 of 360 ° covers.
- an endless rotation guide is to be understood that a plurality of complete rotations can be performed around the rotation area 17 in the same direction, without having to be turned back. This requires a corresponding implementation of the existing lines 18 from the control station 10 in the working arm 16, which do not inhibit Endlosfan sadness.
- the working arm has a plurality of hinges 19 and 20 on which, in conjunction with the associated lifting cylinders 21 and 22 form the degrees of freedom of movement of the arms.
- hinges 19 and 20 on which, in conjunction with the associated lifting cylinders 21 and 22 form the degrees of freedom of movement of the arms.
- other joints or telescopic cylinders or telescopic arms would be conceivable to optimize the operating radius of the working arm.
- This handling device 26 has on its underside a plurality of vacuum cups 27, which can suck in and hold the glass plates or solar modules.
- a corresponding supply of vacuum can be done from the control station 10, via lines 18, or it can be provided in the region of the handling device 26 vacuum generator, which are supplied from the control station 10 with energy.
- the handling device 26 can be pivoted about its multi-axis turning about different axes.
- a longitudinal pivoting area 28 is necessary, inter alia, for the reception of horizontal solar modules or glass plates, since these must be taken out of the plane.
- a joint pivoting about the axes 19, 20 and 29 can accommodate any part 23 lying on the loading area 3 become. Accordingly, when storing the glass plates or solar modules, for example, proceed on mounting racks.
- the vehicle 1 can work in this way, with appropriate dimensioning of the working arm 16 on the endless rotation in the rotor 15 on both sides left and right of the vehicle 1 and in front of and behind the vehicle 1 and place a variety of glass plates or solar modules, without proceeding to have to. After installation, the vehicle moves to the next mounting position and is stabilized again on the supports and signs.
- the dozer blades additionally offer the advantage that, to a certain extent, terrain can be made for the travel paths of the vehicle 1.
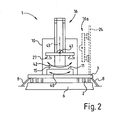
- FIG. 2 shows a frontal view of the vehicle 1 with lowered blade 6 and extended supports. 8
- the base 11 On the floor or loading area 3, the base 11 is arranged.
- the base can be pivoted about the lifting cylinder 12 via a pivoting area 40 for providing a slope compensation.
- the rotor 15 On the base 11, the rotor 15 is arranged with the working arm 16 attached thereto.
- the arranged at the front free end of the working arm 16 handling device 26 has over its multi-axis turning another pivot axis 41, which provides a transverse pivoting portion 42.
- the transverse pivoting region is provided on one side, preferably on both sides up to the vertical arrangement of the handling device.
- the handling device 26 can thus accommodate both lying on the surface 3 and vertical modules.
- handling device 26 may also be designed to be rotatable about the longitudinal axis 43 of the front part of the working arm 16. A held on the vacuum suction module can thereby be rotated in its plane when, for example, a certain mounting orientation must be achieved.
- FIG. 3 shows an inventive assembly vehicle 51, which is designed as a tracked vehicle.
- the vehicle 51 comprises a driver's cab 52 with the operating station for locomotion and operation arranged therein.
- the operating position of the driver's cabin 52 is designed to be rotatable, so that an orientation of the operating personnel in the direction of the loading surface 53 can be set during the assembly operation of the assembly vehicle 51.
- the operation of the assembly vehicle 51 is carried out by an independent remote control, so that an operator can refer position outside the vehicle.
- the assembly vehicle 51 has at least one drive 54, which may be designed, for example, as an internal combustion engine with a pump for operating various hydraulic drives.
- a support frame 55 in which an array of solar modules 56 is housed.
- the support frame 55 is usually equipped with solar modules 56 supplied by the manufacturer, and placed accordingly by a truck on the assembly vehicle 51 at a designated location on the bed 53. It could also be a Schlepparm or a winch with roller guide may be provided, via which the support frame from the rear can be pulled onto the vehicle. After successful installation of all provided solar modules 56, the empty support frame 55 is removed and replaced by a new filled support frame.
- the assembly vehicle 51 has feed devices 57, which can advance the support frame 55 or the solar modules 56 in the direction of a provision device 58, in the present case on the vehicle left side. In this way, it is ensured that, until the carrier rack 55 has been completely emptied, a solar module 56 is always pushed in an assembly-ready position for acceptance by the supply device 58.
- the ready-cell device 58 is articulated in its lower region at pivot points 59, 60, which enable a pivoting of the provision device 58 to the side facing away from the solar modules 56 and to the respective nearest vehicle end.
- the provisioning device 58 is formed by two telescoping rod elements, which engage like a fork under the surface of a solar module 56 facing them (the lower surface).
- the telescoping rods of the delivery device 58 are equipped with vacuum cups 81 (in FIG FIG. 2 shown), which can come into contact with the provided solar module 56 by suction, and lift the solar module 56 over a distance of about 30 cm from the support frame via the Teleskopiervorgang along the path 61, before pivoting about the pivot point 60 begins.
- the assembly vehicle 51 according to the invention furthermore has a crane 65, which is formed by a vertical column 84, a boom 66 and a handling device 67 arranged on the boom.
- the handling device 67 as a tool 69, in turn has at least four vacuum suction cups 70 for handling a solar module 56.
- the assembly vehicle 51 further has on its underside a dozer blade or a support wheel 71, which is used for leveling the terrain or for supporting the vehicle when large loads of solar modules 56 are charged.
- FIG. 4 shows a rear view of the vehicle 51 according to the invention, wherein in the present case two laterally staggered stages of an assembly process are shown.
- the solar modules 56 are continuously displaced over the distance 80 by the feed elements 57 in order to be ready for takeover at the supply device, so that complete removal of all provided solar modules from the carrier frame 55 is ensured.
- the removal of the solar modules 56 from the support frame 55 takes place here via the suction device 81, which are arranged on the supply device 58.
- the suckers are contacted in a vertical state of the provision device 58 to the solar module 56, after which the telescopic columns of the supply device 58 are raised over the distance 61, and thus the solar module 56 is removed from the support frame 55.
- the supply device 58 is tilted about a pivot angle 82 about the pivot point 59, 60, so that the solar module 56 now rests with its underside on the suckers 81, and on his top for the handling device 67 and the suction cups 70 arranged thereon is accessible.
- the handling device 67 is suspended on the crane 65, along the crane jib 66, wherein a telescopic boom may additionally or alternatively be provided as a pendulum.
- the suspension 68 to which the handling device 67 designed as a telescopic rod is fastened, serves as a lifting and lowering device for the tool 69.
- This can be in the form of a hydraulic device or a cable pull mechanism in order to make the desired lifting height movable.
- a pivot 85 Between the vertical column 84 and the boom 66 is a pivot 85, which allows pivoting of the boom relative to the vehicle, in particular to the loading area.
- the handling device 67 removes the solar module 56 from the supply device 58, after which the suckers 81 on the telescopic poles of the provisioning device are directed towards the respective nearest vehicle end directed out below the solar module 56 so that they can pivot laterally past the solar module 56 back to the starting position, and for the reception of another solar module 56 are available.
- the handling device 67 is pivoted in the direction of a mounting frame 90 by a cylinder 110, after which the solar module 56 is placed and mounted via a corresponding lowering of the handling device 67 at the mounting position. After completion of the assembly process, the vacuum cups 70 are detached from the solar module 56, raised and brought into position for the adoption of a re-provided solar module.
- the assembly vehicle according to the invention can be moved along its direction of travel to the next free mounting position of the mounting frame 90.
- the assembly vehicle 51 For work in rough or sloping terrain, the assembly vehicle 51 according to the invention has a slope compensation 100, which via a cylinder 101, the loading area 53 or the entire arrangement of loading area 53, crane 65 and provisioning device 58 can pivot about a compensation angle 103, so that the vehicle can be moved, for example, on a sloping ground, without the provision and installation of solar modules must take into account the corresponding background angle.
- FIG. 5 shows a vehicle according to the invention with attached maintenance tool 130 on the handling device 67.
- the maintenance tool 130 can be brought in its angle via the pivoting of the handling device 67 on the pendulum joint 68 via the cylinder 110 in an angle parallel to the solar module plane.
- the maintenance device optionally includes water nozzles 131 or compressed air nozzles which wash or blow contaminants from the module surface. Also brushes or wipers are conceivable.
- the maintenance device preferably has rollers 132 to be guided on the module. For more flexible handling, the maintenance device can be rotatably suspended at a point of articulation 133, and sprung over the module via the telescopic handling device.
- the invention is not restricted to the exemplary embodiments shown; in particular, in the exemplary embodiments, because of the clarity, no cable guides for energy or pressure lines are shown. Rather, the invention includes all those embodiments which make use of the idea according to the invention.
Abstract
Description
- Die Erfindung betrifft ein Montagefahrzeug für Glas- bzw. Solarmodule nach dem Oberbegriff des Anspruchs 1.
- Für Solarmodule stellt sich im Besonderen beim Transport und bei deren Montage oftmals ein hohes Risiko einer Beschädigung dar. Zusätzlich sind Solarmodule in ihrem Wirkungsgrad stark von der Sauberkeit ihrer Oberfläche abhängig, weswegen Verschmutzungen durch Staub und Umweltrückstände nachteilige Auswirkungen haben.
- Aufgrund immer größer werdender Abmessungen eines Solarmoduls, welche Kantenlängen von 2m und mehr aufweisen, erhöht sich das Eigengewicht des Moduls erheblich, wodurch sich die Handhabung des Moduls während seiner Montage erschwert. Es besteht beispielsweise die Gefahr, dass das Solarmodul bei der Anordnung auf einem Montagegestell in einer nahezu horizontalen Montageposition durch das hohe Eigengewicht des Solarmoduls während einer Montage zerbricht.
- Zusätzliche Nachteile ergeben sich während des Transportes, wobei große Solarmodule mit einem hohen Eigengewicht mit erheblicher Sorgfalt transportiert werden müssen. Dies stellt beispielsweise bei der Errichtung von Solarparks eine Herausforderung dar, wenn eine möglichst große. Flächenabdeckung erzielt werden soll, und somit wenig Platz für maschinelle Hilfsmittel wie z.B. Kranfahrzeuge zur Verfügung steht.
Aus dem Stand der Technik ist bekannt, LKW's mit einem Kran auszustatten, an dessen Kranhaken eine akkubetriebene Vakuumsaugeinheit angehängt ist. Über die Vakuumsaugeinheit können Glasplatten oder Solarmodule von der Ladefläche aufgenommen und mit dem Kran transportiert werden. - Aus diesem Grunde hat sich die Erfindung die Aufgabe gestellt, ein Montage- und Wartungsfahrzeug für Solarmodule bereitzustellen, das einen Transport, die Handhabung und die Montage von Solarmodulen kostengünstig, effizient und sicher ausführt. Zusätzlich könnte eine Wartung insbesondere eine Reinigung von Solarmodulen, welche in großen Solarparks aufgestellt sind, ermöglicht und vereinfacht werden, um die maximale Leistungsfähigkeit zu erhalten.
- Zur Lösung der Aufgabe ist die Erfindung durch die Merkmale des Patentanspruchs 1 gekennzeichnet.
- Vorteilhafte Erweiterungen der Erfindungen sind in den abhängigen Ansprüchen beschrieben.
- Die Erfindung betrifft ein Fahrzeug, insbesondere zur Bereitstellung und Montage von Glasplatten oder Solarmodulen, welches ein Fahrgestell zur Fortbewegung, einen Antrieb zur Bereitstellung von Antriebsenergie, eine Steuerkonsole, eine Stand- bzw. Ladefläche sowie einen Arbeitsarm mit mindestens einem Ausleger und einer daran torsionsstabil schwenkbar angeordneten Handhabungsvorrichtung an einem Ende umfasst, wobei der Arbeitsarm an einem zweiten Ende auf der Stand- bzw. Ladefläche befestigt ist und die Befestigung Mittel zur Ausführung einer Drehbewegung um eine senkrecht auf der Stand- bzw. Ladefläche stehende Achse aufweist. Die Erfindung ist dadurch gekennzeichnet, dass die Handhabungsvorrichtung durch den Antrieb mit Energie, vorzugsweise mit elektrischer Energie und/oder Hydraulikdruck und/oder Pneumatikdruck, insbesondere Vakuum versorgt wird und in der Handhabungsvorrichtung eine Mehrachsendrehkopf mit vorzugsweise mindestens einer Werkzeugaufnahme vorgesehen ist.
- Das Montagefahrzeug kann als selbstfahrendes Fahrzeug ausgebildet sein, welches mit einem Verbrennungsmotor oder mit einem elektrischen Motor ausgebildet ist. Als Werkzeug kann an der Handhabungsvorrichtung entweder mindestens ein Vakuumsauger zur Handhabung von Solarmodulen, oder eine Wartungsvorrichtung, vorzugsweise eine Reinigungsvorrichtung angeordnet werden.
- Eine Energieversorgung der Handhabungsvorrichtung durch den Antrieb hat den Vorteil, dass keine zusätzlichen Energieversorgungsmittel im Bereich der Handhabungsvorrichtung, beispielsweise Akkus angeordnet werden müssen, was das Gesamtgewicht der Handhabungsvorrichtung und deren Komplexität insgesamt verringert. Zusätzlich wird die Bewegungsfreiheit einer erfindungsgemäßen Handhabungsvorrichtung vergrößert.
- Die Versorgung des Vakuumsaugers mit Vakuum vom Fahrzeug wird mittels einer vom Fahrzeug ausgehenden Unterdruckleitung ausgeführt, wodurch die Anordnung einer Vakuumpumpe im Bereich der Handhabungsvorrichtung nicht erforderlich ist. Dies verringert das Gesamtgewicht und erhöht den Freiheitsgrad der Handhabung der gesamten Handhabungsvorrichtung. Die Anordnung einer Vakuum erzeugenden Vorrichtung, welche vom Antrieb mit Energie versorgt wird, an der Handhabungsvorrichtung erhöht jedoch im Einzelfall die Bewegungsfreiheit der Handhabungsvorrichtung, da keine zusätzlichen Schlauchleitungen und komplizierte Vakuumdurchführungen erforderlich sind.
- Die Befestigung der Handhabungsvorrichtung mittels einer torsionsstabilen Aufhängung an dem Arbeitsarm, welcher auch als Hebevorrichtung, insbesondere als an einem Kranausleger pendelnd und mittels eines hydraulischen oder pneumatischen Antriebszylznders auslenkbarer Arm ausgebildet sein kann, bietet eine verbesserte exaktere Positionierungsmöglichkeit. Außerdem stellt diese robuste und einfache Mechanik stellt eine hohe Verfügbarkeit bei geringem Wartungsbedarf dar.
- Es kann auch vorgesehen werden, dass die Handhabungsvorrichtung teleskopierbar ausgebildet ist. Durch eine derartige Ausbildung kann ein Vertikalversatz auch direkt über die Handhabungsvorrichtung erreicht werden, und in Kombination mit der pendelnden Aufhängung sind verschiedenste Winkelbereiche und Radien einstellbar.
- Weiterhin ist vorgesehen, dass in der Handhabungsvorrichtung ein Mehrachsendrehkopf vorgesehen ist. Der Mehrachsendrehkopf ist vorzugsweise am Ende zwischen der torsionsstabilen Aufhängung und der Handhabungsvorrichtung mit den Vakuumsaugern angeordnet. Der Mehrachsendrehkopf gewährleistet ein Verschwenken und Drehen der Handhabungsvorrichtung.
- In einer bevorzugten Ausführung ist vorgesehen, dass die Mittel zur Ausführung einer Drehbewegung eine Endlosdrehführung mit einem Drehbereich von 360° aufweisen.
- Auf diese Weise können die Bewegungen des Arbeitsarms auf den jeweils kürzesten Wegen ausgeführt werden und der gesamte Bereich um das Montagefahrzeug herum erreicht werden. Dies beschleunigt und vereinfacht die Montagearbeiten erheblich.
- In einer weiteren Ausführung der Erfindung ist vorgesehen, dass mindestens eine Stütz- und/oder Planiervorrichtung zur Stabilisierung und/oder Einebnung einer Standposition des Fahrzeugs vorgesehen ist, wobei die Stütz- und/oder Planiervorrichtung mindestens ein Schild und/oder mindestens einen Ausleger mit Stütztellern umfasst.
- Ein unterhalb der Ladefläche am Fahrzeuggestell angeordnetes Planierschild kann durch Verfahren des Montagefahrzeuges den Untergrund unterhalb des Fahrzeuges zumindest teilweise einebnen. Ein unterhalb der Fahrzeugladefläche angeordnetes Stützrad und/oder seitliche Stützausleger dienen hierbei zur Abstützung des Fahrzeuges, wenn der Teleskopständer bzw. der Teleskopausleger ihre maximale Ausfahrposition bzw. Höhenposition eingenommen haben.
- In einer weiteren bevorzugten Ausführung ist die Erfindung dadurch gekennzeichnet, dass die Stand- bzw. Ladefläche Mittel zur Aufnahme, Halterung und Sicherung von Glasplatten oder Solarmodulen, insbesondere in einem Trägergestell aufweist.
- Dies ist besonders in unwegsamem Gelände oder bei Transportfahren hilfreich und zweckmäßig.
- In einer weiteren Ausführung ist vorgesehen, dass die Befestigung des Arbeitsarms und/oder die Stand- bzw. Ladefläche Mittel zur Ausführung einer Schwenkbewegung um eine parallel zur Stand- bzw. Ladefläche und senkrecht zur Drehachse verlaufende Achse als Hangausgleich aufweist.
- Die gesamte Vorrichtung wird seitlich auf der Ladefläche des Fahrzeuges angelenkt und kann durch angeordnete Hebemittel in eine lotrechte Position im Bezug auf das Montagegerüst eines Solarmoduls gebracht werden. Dies gewährleistet einen sicheren Transport und eine exakte Montage eines Solarmoduls. Es kann auch ein Hangausgleich zur Verschwenkung der Ladefläche, der Hebevorrichtung und der Bereitstellungsvorrichtung gegenüber einem Fahrgestell vorgesehen sein. Dabei werden die Ladefläche, als auch die Hebevorrichtung und eine Bereitstellungsvorrichtung für zu montierende Solarmodule derart angelenkt, dass diese unabhängig voneinander für einen Hangausgleich verschwenkbar sind. Dies ermöglicht einen größeren Freiheitsgrad mit Bezug auf die Ausrichtung eines Solarmoduls gegenüber dem Montagegerüst.
- In einer weiteren Ausführung ist die Erfindung dadurch gekennzeichnet, dass der Arbeitsarm Hohlprofilteile umfassend ausgebildet ist, wobei die Hohlprofilteile vorzugsweise zwischen Gelenken des Arbeitsarms innenliegende Leitungsführungen für elektrische und/oder hydraulische und/oder pneumatische und/oder Vakuum-Leitungen aufweisen.
- Dies verbessert die Störungsanfälligkeit durch äußere Beschädigungen und stellt eine kompaktere Bauform dar.
- Weiterhin ist vorgesehen, dass der Arbeitsarm teleskopierbare Elemente, vorzugsweise Ausleger umfasst.
- Das Element kann beispielsweise aus einem Rohr-in-Rohr-System ausgebildet sein, welches eine einfache vertikale Verschiebung des Teleskopierelementes ermöglicht. Dies hat den Vorteil, dass das Montagefahrzeug während des Transportes zu einem Montageort von Solarmodulen die Hebevorrichtung auf ein Höhenmaß reduzieren kann, welches ein ungehindertes Durchfahren von beispielsweise Brückendurchfahrten ermöglicht. Darüber hinaus ist ein derartiger Teleskopständer an unterschiedliche Höhen von Montagegerüsten für Solarmodule anpassbar. Der Ausleger, welcher als Teleskopausleger gebildet sein kann, ermöglicht eine Montage von Solarmodulen an schwer zugänglichen Montagegerüsten. Diese baulichen Maßnahmen vergrößern insgesamt die Flexibilität der Montage eines Solarmoduls ohne nennenswerten Verzicht auf sicherheitsrelevante Aspekte.
- In einer weiteren Ausführung des erfindungsgemäßen Fahrzeugs ist dies dadurch gekennzeichnet, dass die Werkzeugaufnahme an der Handhabungsvorrichtung mindestens einen Vakuumsauger vorzugsweise eine Anordnung von Vakuumsaugern als Werkzeug und/oder mindestens eine Reinigungsvorrichtung als Werkzeug aufnimmt bzw. trägt.
- Im Wartungsbetrieb des erfindungsgemäßen Fahrzeugs ist vorgesehen, dass als Wartungs- bzw. Reinigungsvorrichtung eine Bürste, eine Waschvorrichtung oder eine Druckluftvorrichtung an der Werkzeugaufnahme angeordnet ist, wobei auf der Ladefläche vorzugsweise ein Reinigungsflüssigkeit bevorratender Tank vorgesehen ist.
- Solarmodule, auf deren Oberfläche Staub abgelagert ist, oder welche durch Wettereinflüsse verschmutzt sind, können über diese Wartungsvorrichtungen gereinigt werden, wobei die unterschiedlichen Werkzeuge für unterschiedliche Verunreinigungen zum Einsatz kommen.
- Die Montage und Wartung von Solarmodulen mit einem erfindungsgemäßen Fahrzeug erfolgt vorzugsweise in großen Solarparks, bei welchen die Module in Bodennähe entlang von Reihen aufgestellt sind. Die Gänge zwischen den Reihen sind oftmals schmal, da die Flächenausnutzung zur Energieausbeute optimiert wird. Das erfindungsgemäße Fahrzeug kann an die Gangbreite angepasst aufgebaut werden, oder ggf. noch mit einer einstellbaren Spurbreite eine verbesserte Mobilität bereitstellen. Vorteilhaft ist die flexible Nutzung als Montage- und Wartungsfahrzeug, welches beim Aufbau, bei der Pflege und bei Austauscharbeiten an einem Solarfeld eingesetzt werden kann.
- Im Folgenden sollen die erfindungswesentlichen Merkmale anhand von Ausführungsbeispielen weiter erläutert werden. Die Erfindung ist jedoch nicht auf die gezeigten Beispiele beschränkt. Sie umfasst vielmehr all diejenigen Ausgestaltungen, welche von der erfindungswesentlichen Idee Gebrauch machen.
- Es zeigen:
- Fig. 1
- Eine schematische Seitenansicht eines Fahrzeugs mit mehrgelenkigem Arbeitsarm
- Fig. 2
- Eine schematische Frontansicht eines Fahrzeugs mit mehrgelenkigem Arbeitsarm
- Fig. 3
- eine Seitenansicht eines Montage- und Wartungsfahrzeuges für Solarmodule mit Darstellung einer vertikal verschiebbaren Bereitstellungsvorrichtung.
- Fig. 4
- eine Rückansicht eines Montage- und Wartungsfahrzeuges mit angeordnetem Solarmodul in zwei unterschiedlichen Montagepositionen;
- Fig. 5
- eine Rückansicht eines Montage- und Wartungsfahrzeuges mit angeordnetem Reinigungswerkzeug;
- Im Einzelnen zeigt
Figur 1 ein erfindungsgemäßes Montagefahrzeug 1 mit einem Raupenantrieb 2. Die Raupe 2 trägt eine Stand- bzw. Ladefläche 3. Es sind auch andere Antriebsarten in Form von Reifen denkbar. An einem vorderen Ende 4 und einem hinteren Ende 5 sind jeweils ein Planierschild 6 sowie 7 und Stützen 8 und 9 mit Stütztellern angeordnet. Entsprechende Stützen sind auf der anderen Maschinenseite (hier nicht dargestellt) angeordnet. Die Stützen können als hydraulisch, pneumatisch oder manuell betriebene Teleskopstützen ausgebildet sein. Die Planierschilder sowie die stützen können je nach Bedarf stabilisierend das gesamte Fahrzeug in einer Arbeitsposition abstützen, so dass geforderte Aktionsradien bedient werden können. - Es ist weiterhin modular vorgesehen, dass Hilfsmodule a) bis d) (nur in
Fig. 1 dargestellt) zusätzlich angeordnet werden, wobei exemplarisch eine Palettengabel mit Hubhydraulik a), eine Erdramme zur Einbringung von Gerüststützen b), ein Stromaggregat für Lichtstrom für Nachtarbeiten c) und eine Anhängerkupplung für einen entsprechend aufgebauten Transportanhänger, beispielsweise für weitere Solarmodule d) zu nennen ist. - Auf der Fläche 5 ist ein Steuerstand 10 vorgesehen, wobei das Fahrzeug auch ergänzend oder nur automatisiert oder ferngesteuert ausgebildet werden kann. Im Bereich vor dem Steuerstand 10 befindet sich Sockel 11, welche über einen Hubzylinder 12 eine verschwenkbare Ebene 13 aufweist. Diese Ebene dient zum Ausgleich einer eventuellen Hangneigung beim Einsatz des Montagefahrzeugs. Entsprechende Führungen 14 sind an den Randbereichen der Ebene 13 vorgesehen.
- Auf dem Sockel 11 ist ein Rotor 15 angeordnet, welcher die Basisbefestigung des Arbeitsarms 16 bildet. Der Rotor ist als Endlosdrehführung ausgebildet ausgebildet, welcher einen Drehbereich 17 von 360° abdeckt. Unter einer Endlosdrehführung ist zu verstehen, dass eine Vielzahl von vollständigen Drehungen um den Drehbereich 17 in der Selben Richtung ausgeführt werden können, ohne dass zurückgedreht werden muss. Dies bedingt eine entsprechende Durchführung der vorhandenen Leitungen 18 vom Steuerstand 10 in den Arbeitsarm 16, welche die Endlosdrehbarkeit nicht hemmen.
- Der Arbeitsarm weist mehrere Gelenke 19 und 20 auf welche, in Verbindung mit den zugehörigen Hubzylindern 21 und 22 die Bewegungsfreiheitsgrade der Arms bilden. Es wären zusätzlich auch weitere Gelenke oder Teleskopzylinder oder Teleskopausleger denkbar, um den Aktionsradius des Arbeitsarms zu optimieren.
- Auf dem vorderen Bereich der Stand bzw. Ladefläche 3 können liegend 23 oder stehend 24 Solarmodule oder Glasplatten vorgehalten werden, welche montiert werden sollen. Es wäre auch denkbar, das Fahrzeug verkürzt auszubilden und die Module auf einem Anhänger oder einem separaten Fahrzeug bereitzustellen.
- Am freien Ende 25 des Arbeitsarms ist ein Mehrachsendrehkopf zur Handhabung der Glasplatten bzw. Solarmodule angeordnet. Diese Handhabungsvorrichtung 26 weist an ihrer Unterseite mehrere Vakuumsauger 27 auf, welche die Glasplatten bzw. Solarmodule ansaugen und festhalten können. Eine entsprechende Versorgung mit Vakuum kann vom Steuerstand 10 aus, über Leitungen 18 erfolgen, oder es können Vakuumerzeuger im Bereich der Handhabungsvorrichtung 26 vorgesehen sein, welche vom Steuerstand 10 mit Energie versorgt werden.
- Die Handhabungsvorrichtung 26 kann über ihren Mehrachsendrehkopf um verschiedene Achsen verschwenkt werden. Ein Längsschwenkbereich 28 ist unter anderem für die Aufnahme von liegenden Solarmodulen oder Glasplatten notwendig, da diese aus der Ebene aufgenommen werden müssen. Über ein gemeinsames Verschwenken um die Achsen 19,20 sowie 29 kann jedoch jedes auf der Ladefläche 3 liegende Teil 23 aufgenommen werden. Entsprechend ist bei der Ablage der Glasplatten oder Solarmodule beispielsweise auf Montagegestellen vorzugehen.
- Das Fahrzeug 1 kann auf diese Weise, bei entsprechender Dimensionierung des Arbeitsarms 16 über die Endlosdrehführung im Rotor 15 auf beiden Seiten links und rechts vom Fahrzeug 1 als auch vor und hinter dem Fahrzeug 1 arbeiten und eine Vielzahl von Glasplatten oder Solarmodulen platzieren, ohne verfahren zu müssen. Nach erfolgter Montage fährt das Fahrzeug zur nächsten Montageposition und wird erneut über die Stützen und Schilder stabilisiert.
- Die Planierschilder bieten zusätzlich den Vorteil, dass in einem gewissen Maße eine Geländeeinebnung für die Fahrwege des Fahrzeugs 1 vorgenommen werden kann.
-
Figur 2 zeigt eine frontale Ansicht des Fahrzeugs 1 mit abgesenktem Planierschild 6 und ausgefahrenen Stützen 8. - Auf der Stand- bzw. Ladefläche 3 ist der Sockel 11 angeordnet. Der Sockel kann über einen Verschwenkbereich 40 zur Bereitstellung eines Hangausgleichs über den Hubzylinder 12 verschwenkt werden.
- Auf dem Sockel 11 ist der Rotor 15 mit dem daran befestigten Arbeitsarm 16 angeordnet.
- Die am vorderen freien Ende des Arbeitsarms 16 angeordnete Handhabungsvorrichtung 26 weist über ihren Mehrachsendrehkopf eine weitere Verschwenkachse 41 auf, welche einen Quer-Verschwenkbereich 42 bereitstellt. Der Quer-Verschwenkbereich ist einseitig, vorzugsweise beidseitig bis zur senkrechten Anordnung der Handhabungsvorrichtung vorgesehen. Die Handhabungsvorrichtung 26 kann somit sowohl auf der Fläche 3 liegende als auch senkrecht stehende Module aufnehmen.
- Schematisch (als unterbrochene Linien) ist die Übernahme eines senkrecht stehenden Moduls 24 durch die Handhabungsvorrichtung 16a in einer seitlichen senkrecht eingeschwenkten Position dargestellt. Auf diese Weise kann eine beliebige Anordnung von Glasplatten oder Solarmodulen auf der Stand- bzw. Ladefläche genutzt werden.
- Zusätzlich kann die Handhabungsvorrichtung 26 auch noch um die Längsachse 43 des vorderen Teils des Arbeitsarms 16 drehbar ausgebildet sein. Ein über die Vakuumsauger gehaltenes Modul kann dadurch in seiner Ebene gedreht werden, wenn beispielsweise eine bestimmte Montageorientierung erreicht werden muss.
-
Figur 3 zeigt ein erfindungsgemäßes Montagefahrzeug 51, welches als Raupenfahrzeug ausgebildet ist. Das Fahrzeug 51 umfasst ein Führerhaus 52 mit dem darin angeordneten Bedienstand für Fortbewegung und Betrieb. Der Bedienstand des Führerhauses 52 ist drehbar ausgebildet, sodass während des Montageeinsatzes des Montagefahrzeugs 51 eine Ausrichtung des Bedienpersonals in Richtung der Ladefläche 53 einstellbar ist. In einer nicht dargestellten Fassung ist auch denkbar, dass die Bedienung des Montagefahrzeugs 51 durch eine unabhängige Fernbedienung erfolgt, sodass ein Bedienpersonal außerhalb des Fahrzeugs Position beziehen kann. - Das Montagefahrzeug 51 verfügt über mindestens einen Antrieb 54, welcher beispielsweise als Verbrennungsmotor mit einer Pumpe zum Betrieb verschiedener Hydraulikantriebe ausgebildet sein kann. Auf der Ladefläche 53 befindet sich ein Trägergestell 55 in welchem eine Anordnung von Solarmodulen 56 untergebracht ist. Das Trägergestell 55 wird üblicherweise mit Solarmodulen 56 bestückt vom Hersteller geliefert, und entsprechend von einem Lastwagen auf das Montagefahrzeug 51 an einer dafür vorgesehenen Stelle auf der Ladefläche 53 aufgestellt. Es könnte auch ein Schlepparm oder eine Winde mit Rollenführung vorgesehen sein, über welches das Trägergestell von hinten her auf das Fahrzeug aufziehbar ist. Nach erfolgreicher Montage aller vorgesehenen Solarmodule 56 wird das entleerte Trägergestell 55 entnommen und durch ein neues gefülltes Trägergestell ersetzt.
- Das Montagefahrzeug 51 verfügt über Vorschubeinrichtungen 57, welche das Trägergestell 55 oder die Solarmodule 56 in Richtung einer Bereitstellungsvorrichtung 58, vorliegend fahrzeuglinksseitig dargestellt, vorschieben kann. Auf diese Weise wird sichergestellt, dass bis zur vollständigen Entleerung des Trägergestells 55 stets ein Solarmodul 56 in einer montagebereiten Position zur Übernahme durch die Bereitstellungsvorrichtung 58 herangeschoben ist.
- Die Bereitszellungsvorrichtung 58 ist in ihrem unteren Bereich an Drehpunkten 59, 60 angelenkt, welche ein Verschwenken der Bereitstellungsvorrichtung 58 zu der den Solarmodulen 56 abgewandten Seite und zum jeweils nächstgelegenen Fahrzeugende hin ermöglichen. Die Bereitstellungsvorrichtung 58 ist dabei durch zwei teleskopierbare Stangenelemente gebildet, welche Gabelartig die ihnen zugewandte Fläche eines Solarmodule 56 (die untere Fläche) untergreifen. Die teleskopierbaren Stangen der Bereitstellungsvorrichtung 58 sind mit Vakuumsaugern 81 ausgestattet (in
Figur 2 gezeigt), welche durch Ansaugen mit dem bereitgestellten Solarmodul 56 in Verbindung treten können, und über den Teleskopiervorgang entlang der Strecke 61 das Solarmodul 56 über eine Strecke von ca. 30 cm aus dem Trägergestell herausheben, bevor ein Verschwenken um den Drehpunkt 60 beginnt. - Es ist auch eine Ausführung ohne Bereitstellungsvorrichtung vorgesehen, bei welcher die Handhabungsvorrichtung 67 mit den Vakuumsaugern 70 das Solarmodul 56 direkt entnimmt, so dass es bereits im Trägergestell 55 oder auf der Lagerfläche bereitgestellt ist.
- Das erfindungsgemäße Montagefahrzeug 51 verfügt des Weiteren über einen Kran 65, welcher durch eine Vertikalsäule 84, einem Ausleger 66 sowie eine an dem Ausleger angeordnete Handhabungsvorrichtung 67 gebildet wird.
- Im Montagebetrieb verfügt die Handhabungsvorrichtung 67 als Werkzeug 69 ihrerseits über mindestens vier Vakuumsauger 70 zur Handhabung eines Solarmoduls 56 verfügt.
- Das Montagefahrzeug 51 verfügt weiterhin auf seiner Unterseite über ein Planierschild oder ein Stützrad 71, welches zur Einebnung des Geländes oder zur Abstützung des Fahrzeugs bei Aufladung großer Lasten von Solarmodulen 56 eingesetzt wird.
- Auch die oben erwähnten weitern Hilfsmodule sind denkbar.
- Die in der Einleitung beschriebenen Zuleitungen für Energie- bzw. Unterdruckversorgung an die entsprechenden Stellen sind in vorliegender schematischer Skizze nicht gezeigt, da sie im Wesentlichen in den einzelnen Fahrzeugbestandteilen innenliegend ausgeführt werden. Zur Übersichtlichkeit wurden die außenliegend geführten Leitungen ebenfalls nicht dargestellt.
-
Figur 4 zeigt eine Heckansicht des erfindungsgemäßen Fahrzeugs 51, wobei vorliegend zwei seitlich versetzte Stadien eines Montagevorgangs dargestellt sind. - Die Solarmodule 56 werden zur Bereitstellung für eine Übernahme an der Bereitstellungsvorrichtung durch die Vorschubelemente 57 kontinuierlich über die Strecke 80 verschoben, sodass eine vollständige Entnahme aller bereitgestellten Solarmodule aus dem Trägergestell 55 gewährleistet ist. Die Entnahme der Solarmodule 56 aus dem Trägergestell 55 erfolgt hierbei über die Sauger 81, welche an der Bereitstellungsvorrichtung 58 angeordnet sind. Die Sauger werden in einem senkrechten Zustand der Bereitstellungsvorrichtung 58 an dem Solarmodul 56 kontaktiert, wonach die Teleskopsäulen der Bereitstellungsvorrichtung 58 über die Strecke 61 angehoben werden, und somit das Solarmodul 56 aus dem Trägergestell 55 entnommen wird.
- Zur Bereitstellung des Solarmoduls 56 für die Übernahme durch die Handhabungsvorrichtung 67 und das Werkzeug 69 wird die Bereitstellungsvorrichtung 58 um einen Schwenkwinkel 82 um den Drehpunkt 59, 60 verkippt, sodass das Solarmodul 56 nunmehr mit seiner Unterseite auf den Saugern 81 aufliegt, und auf seiner Oberseite für die Handhabungsvorrichtung 67 und die daran angeordneten Sauger 70 zugänglich ist.
- Die Handhabungsvorrichtung 67 wird am Kran 65, entlang des Kranauslegers 66, wobei ergänzend oder alternativ auch ein Teleskopausleger vorgesehen sein kann, pendelnd aufgehängt. Die Aufhängung 68, an welcher die als Teleskopstange ausgebildete Handhabungsvorrichtung 67 befestigt ist, dient als Hebe- und Senkvorrichtung für das Werkzeug 69. Diese kann in Form einer hydraulischen Vorrichtung oder eines Seilzugmechanismus ausgebildet sein, um die gewünschte Hubhöhe verfahrbar zu machen. Zwischen der Vertikalsäule 84 und dem Ausleger 66 befindet sich ein Drehgelenk 85, welches ein Verschwenken des Auslegers relativ zum Fahrzeug, insbesondere zur Ladefläche, ermöglicht.
- Die Handhabungsvorrichtung 67 entnimmt das Solarmodul 56 von der Bereitstellungsvorrichtung 58, wonach die Sauger 81 an den Teleskopstangen der Bereitstellungsvorrichtung zum jeweils nächstgelegenen Fahrzeugende hin gerichtet unterhalb des Solarmoduls 56 herausgeschwenkt werden, sodass sie seitlich am Solarmodul 56 vorbei zurück in die Ausgangsposition schwenken können, und für die Aufnahme eines weiteren Solarmoduls 56 bereitstehen.
- Die Handhabungsvorrichtung 67 in Richtung eines Montagegestells 90 durch einen Zylinder 110 ausgeschwenkt, wonach das Solarmodul 56 über eine entsprechende Absenkung der Handhabungsvorrichtung 67 an der Montageposition platziert und montiert wird. Nach abgeschlossenem Montagevorgang werden die Vakuumsauger 70 vom Solarmodul 56 gelöst, angehoben und für die Übernahme eines erneut bereitgestellten Solarmoduls in Position gebracht. Das erfindungsgemäße Montagefahrzeug kann dabei entlang seiner Fahrtrichtung zum nächsten freien Montageplatz des Montagegestells 90 verfahren werden.
- Für Arbeiten in unwegsamem oder schrägem Gelände weist das erfindungsgemäße Montagefahrzeug 51 einen Hangausgleich 100 auf, welcher über einen Zylinder 101 die Ladefläche 53 oder die gesamte Anordnung von Ladefläche 53, Kran 65 und Bereitstellungsvorrichtung 58 um einen Ausgleichswinkel 103 verschwenken kann, sodass das Fahrzeug beispielsweise auf einem schrägen Untergrund verfahren werden kann, ohne dass die Bereitstellung und Montage von Solarmodulen unter Berücksichtigung des entsprechenden Untergrundwinkels erfolgen muss.
-
Figur 5 zeigt ein erfindungsgemäßes Fahrzeug mit angesetztem Wartungswerkzeug 130 an der Handhabungsvorrichtung 67. Das Wartungswerkzeug 130 kann in seinem Winkel über die Verschwenkung der Handhabungsvorrichtung 67 am Pendelgelenk 68 über den Zylinder 110 in einen zur Solarmodulebene parallelen Winkel gebracht werden. - Die Wartungsvorrichtung umfasst wahlweise Wasserdüsen 131 oder Druckluftdüsen, welche Verunreinigungen von der Modulfläche waschen oder blasen. Auch Bürsten oder Wischeinrichtungen sind denkbar. Die Wartungsvorrichtung verfügt vorzugsweise über Rollen 132, um auf dem Modul geführt zu werden. Zur flexibleren Handhabung kann die Wartungsvorrichtung an einem Anlenkpunkt 133 drehbar aufgehängt sein, und über die teleskopierbare Handhabungsvorrichtung gefedert über das Modul geführt werden.
- Die Erfindung ist vorliegend jedoch nicht auf die gezeigten Ausführungsbeispiele beschränkt, insbesondere sind in den Ausführungsbeispielen aufgrund der Übersichtlichkeit keine Leitungsführungen für Energie- bzw. Druckleitungen dargestellt. Die Erfindung umfasst vielmehr all diejenigen Ausgestaltungen, welche von der erfindungsgemäßen Idee Gebrauch machen.
Claims (10)
- Fahrzeug, insbesondere zu Bereitstellung und Montage von Glasplatten oder Solarmodulen, umfassend- ein Fahrgestell zur Fortbewegung,- einen Antrieb zur Bereitstellung von Antriebsenergie,- eine Steuerkonsole,- eine Stand- bzw. Ladefläche sowie- einen Arbeitsarm mit mindestens einem Ausleger und einer daran torsionsstabil schwenkbar angeordneten Handhabungsvorrichtung an einem Ende,- wobei der Arbeitsarm an einem zweiten Ende auf der Stand- bzw. Ladefläche befestigt ist und die Befestigung Mittel zur Ausführung einer Drehbewegung um eine senkrecht auf der Stand- bzw. Ladefläche stehende Achse aufweist,dadurch gekennzeichnet, dass- die Handhabungsvorrichtung durch den Antrieb mit Energie, vorzugsweise mit elektrischer Energie und/oder Hydraulikdruck und/oder Pneumatikdruck, insbesondere Vakuum versorgt ist und- in der Handhabungsvorrichtung eine Mehrachsendrehkopf mit vorzugsweise mindestens einer Werkzeugaufnahme vorgesehen ist.
- Fahrzeug nach Anspruch 1, dadurch gekennzeichnet, dass die Mittel zur Ausführung einer Drehbewegung eine Endlosdrehführung mit einem Drehbereich von 360° aufweisen.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass mindestens eine Stütz- und/oder Planiervorrichtung zur Stabilisierung und/oder Einebnung einer Standposition des Fahrzeugs vorgesehen ist, wobei die Stütz- und/oder Planiervorrichtung mindestens ein Schild und/oder mindestens einen Ausleger mit Stütztellern umfasst.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass die Stand- bzw. Ladefläche Mittel zur Aufnahme, Halterung und Sicherung von Glasplatten oder Solarmodulen, insbesondere in einem Trägergestell aufweist.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass die Befestigung des Arbeitsarms und/oder die Stand- bzw. Ladefläche Mittel zur Ausführung einer Schwenkbewegung um eine parallel zur Stand- bzw. Ladefläche und senkrecht zur Drehachse verlaufende Achse als Hangausgleich aufweist.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass der Arbeitsarm Hohlprofilteile umfassend ausgebildet ist, wobei die Hohlprofilteile vorzugsweise zwischen Gelenken des Arbeitsarms innenliegende Leitungsführungen für elektrische und/oder hydraulische und/oder pneumatische und/oder Vakuum-Leitungen aufweisen.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass der Arbeitsarm teleskopierbare Elemente, vorzugsweise Ausleger umfasst.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass die Werkzeugaufnahme an der Handhabungsvorrichtung mindestens einen Vakuumsauger vorzugsweise eine Anordnung von Vakuumsaugern als Werkzeug und/oder mindestens eine Reinigungsvorrichtung als Werkzeug aufnimmt bzw. trägt.
- Fahrzeug nach einem der vorangegangenen Ansprüche, dadurch gekennzeichnet, dass ein Raupenfahrwerk, vorzugsweise mit einem Hydraulikantrieb vorgesehen ist.
- Fahrzeug nach Anspruch 9, dadurch gekennzeichnet, dass Hilfsmodule am Fahrgestell und/oder an der Stand- bzw. Ladefläche angeordnet werden, wobei insbesondere eine Palettengabel mit Hubhydraulik und/oder eine Erdramme zur Einbringung von Gerüststützen und/oder ein Stromaggregat für Lichtstrom und/oder eine Anhängerkupplung für einen Transportanhänger, insbesondere ebenfalls mit Raupenfahrwerk vorgesehen sind.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102009060996A DE102009060996A1 (de) | 2009-06-19 | 2009-06-19 | Montagefahrzeug für Solarmodule |
| DE102009034271A DE102009034271A1 (de) | 2009-07-21 | 2009-07-21 | Montage- und Wartungsfahrzeug für Solarmodule |
| DE200910049926 DE102009049926A1 (de) | 2009-10-19 | 2009-10-19 | Montagefahrzeug für Glas- bzw. Solarmodule |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2263964A2 true EP2263964A2 (de) | 2010-12-22 |
| EP2263964A3 EP2263964A3 (de) | 2011-09-14 |
Family
ID=42710586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10006405A Withdrawn EP2263964A3 (de) | 2009-06-19 | 2010-06-21 | Montagefahrzeug für Glas- bzw. Solarmodule |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2263964A3 (de) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011151440A1 (de) * | 2010-06-02 | 2011-12-08 | Kiener Maschinenbau Gmbh | Verfahren zur automatisierten montage von modulen an aufnahmeeinrichtungen, insbesondere solarmodulen auf aufständerungen sowie mobile montageeinrichtungen für solche module |
| DE102010038054A1 (de) * | 2010-09-08 | 2012-03-08 | Reis Group Holding Gmbh & Co. Kg | Verfahren und Fahrzeug zum Handhaben von Solarzellenmodulen |
| EP2617674A1 (de) * | 2012-01-17 | 2013-07-24 | Manfred Riesenberg | Vorrichtung zur Handhabung von Waren |
| FR3018069A1 (fr) * | 2014-03-03 | 2015-09-04 | Peugeot Citroen Automobiles Sa | Dispositif de controle et de nettoyage des ventouses de prehension portees par un prehenseur de transfert de pieces |
| CN105858512A (zh) * | 2016-05-19 | 2016-08-17 | 诸葛杨杨 | 一种物料升降装置 |
| WO2019097348A1 (en) * | 2017-11-14 | 2019-05-23 | Comau S.P.A. | A method and system for installing photovoltaic solar panels in an outdoor area |
| CN109914302A (zh) * | 2019-03-15 | 2019-06-21 | 南京金长江交通设施有限公司 | 锤头旋转装置 |
| CN110294437A (zh) * | 2019-07-05 | 2019-10-01 | 河南嘉瑞电力工程有限公司 | 一种高低压成套电力设备安装用工作台 |
| WO2021240467A1 (en) * | 2020-05-29 | 2021-12-02 | Sacmi Tech S.p.A | Vehicle to collect and transport flat articles, system and method to handle flat articles |
| CN114084629A (zh) * | 2021-10-18 | 2022-02-25 | 中国华能集团清洁能源技术研究院有限公司 | 一种仓盒式光伏组件自动安装装置 |
| CN114837434A (zh) * | 2022-04-25 | 2022-08-02 | 中国建筑第五工程局有限公司 | 一种用于玻璃幕墙的快速安装辅助装置 |
| CN116462080A (zh) * | 2023-06-19 | 2023-07-21 | 长沙力度智能科技有限公司 | 一种光伏板铺设用吊装设备 |
| US11919149B2 (en) | 2020-03-20 | 2024-03-05 | Rosendin Electric, Inc. | Autonomous ground vehicle for solar module installation |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4676713A (en) * | 1985-12-06 | 1987-06-30 | Voelpel Charles E | Material handling machine |
| DE4006860A1 (de) * | 1990-03-05 | 1991-09-12 | Goepfert Reinhard | Selbstfahrendes hebegeraet |
| US5224808A (en) * | 1991-05-13 | 1993-07-06 | James Macris | Wall board lifting and positioning apparatus |
| JP3379632B2 (ja) * | 1997-12-02 | 2003-02-24 | 本田技研工業株式会社 | 把持装置 |
| FR2776006B1 (fr) * | 1998-03-16 | 2000-05-19 | Conception Commercialisation M | Engin de manutention, notamment de travaux publics, permettant de realiser la mise en place de glissieres de securite ou barrieres le long des accotements ou dans la partie centrale d'une route ou autoroute |
| GB9906213D0 (en) * | 1999-03-18 | 1999-05-12 | G G R Glass Services Limited | Panel manipulation device |
-
2010
- 2010-06-21 EP EP10006405A patent/EP2263964A3/de not_active Withdrawn
Non-Patent Citations (1)
| Title |
|---|
| None |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011151440A1 (de) * | 2010-06-02 | 2011-12-08 | Kiener Maschinenbau Gmbh | Verfahren zur automatisierten montage von modulen an aufnahmeeinrichtungen, insbesondere solarmodulen auf aufständerungen sowie mobile montageeinrichtungen für solche module |
| DE102010038054A1 (de) * | 2010-09-08 | 2012-03-08 | Reis Group Holding Gmbh & Co. Kg | Verfahren und Fahrzeug zum Handhaben von Solarzellenmodulen |
| EP2617674A1 (de) * | 2012-01-17 | 2013-07-24 | Manfred Riesenberg | Vorrichtung zur Handhabung von Waren |
| FR3018069A1 (fr) * | 2014-03-03 | 2015-09-04 | Peugeot Citroen Automobiles Sa | Dispositif de controle et de nettoyage des ventouses de prehension portees par un prehenseur de transfert de pieces |
| CN105858512A (zh) * | 2016-05-19 | 2016-08-17 | 诸葛杨杨 | 一种物料升降装置 |
| CN105858512B (zh) * | 2016-05-19 | 2018-09-18 | 河北励曙建筑安装工程有限公司 | 一种物料升降装置 |
| US11245353B2 (en) | 2017-11-14 | 2022-02-08 | Comau S.P.A. | Method and system for installing photovoltaic solar panels in an outdoor area |
| WO2019097348A1 (en) * | 2017-11-14 | 2019-05-23 | Comau S.P.A. | A method and system for installing photovoltaic solar panels in an outdoor area |
| AU2018369820B2 (en) * | 2017-11-14 | 2023-03-16 | Comau S.P.A. | A method and system for installing photovoltaic solar panels in an outdoor area |
| CN109914302A (zh) * | 2019-03-15 | 2019-06-21 | 南京金长江交通设施有限公司 | 锤头旋转装置 |
| CN110294437A (zh) * | 2019-07-05 | 2019-10-01 | 河南嘉瑞电力工程有限公司 | 一种高低压成套电力设备安装用工作台 |
| US11919149B2 (en) | 2020-03-20 | 2024-03-05 | Rosendin Electric, Inc. | Autonomous ground vehicle for solar module installation |
| US11951617B2 (en) | 2020-03-20 | 2024-04-09 | Rosendin Electric, Inc. | Robotic arm cooperating with an off-road capable base vehicle |
| WO2021240467A1 (en) * | 2020-05-29 | 2021-12-02 | Sacmi Tech S.p.A | Vehicle to collect and transport flat articles, system and method to handle flat articles |
| CN114084629A (zh) * | 2021-10-18 | 2022-02-25 | 中国华能集团清洁能源技术研究院有限公司 | 一种仓盒式光伏组件自动安装装置 |
| CN114837434A (zh) * | 2022-04-25 | 2022-08-02 | 中国建筑第五工程局有限公司 | 一种用于玻璃幕墙的快速安装辅助装置 |
| CN114837434B (zh) * | 2022-04-25 | 2023-09-22 | 中国建筑第五工程局有限公司 | 一种用于玻璃幕墙的快速安装辅助装置 |
| CN116462080A (zh) * | 2023-06-19 | 2023-07-21 | 长沙力度智能科技有限公司 | 一种光伏板铺设用吊装设备 |
| CN116462080B (zh) * | 2023-06-19 | 2023-09-08 | 长沙力度智能科技有限公司 | 一种光伏板铺设用吊装设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2263964A3 (de) | 2011-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2263964A2 (de) | Montagefahrzeug für Glas- bzw. Solarmodule | |
| DE102011018222B4 (de) | Rangiervorrichtung zur Montage einer auswechselbaren Fräseinrichtung einer Straßenbaumaschine | |
| DE102008023645B4 (de) | Omnidirektionales Fahrzeug-System und zugehörige Hubarbeitsbühne | |
| DE102012003690A1 (de) | Mobiler Roboter | |
| EP0847348B1 (de) | Fahrbare arbeitsmaschine mit seitlich ausschwenkbaren stützauslegern | |
| DE102013009357A1 (de) | Modularer Mobilkran | |
| EP2640911A1 (de) | Mobiles arbeitsgerät mit abstützkonstruktion | |
| DE102009049926A1 (de) | Montagefahrzeug für Glas- bzw. Solarmodule | |
| EP2794345A1 (de) | Lastkraftwagen mit einem mehrachsigen fahrgestell zum transportieren, absetzen und aufnehmen von stückgut | |
| WO2011110670A1 (de) | Parabolspiegelwaschfahrzeugid50000030586474 pub copy null | |
| EP3833626B1 (de) | Fahrzeugkransystem zum transport eines anbauteils, insbesondere eines hauptauslegers eines fahrzeugkrans | |
| EP3003955B1 (de) | Arbeitsgerät mit an einem drehkopf angeordnetem arbeitsausleger | |
| DE19823380C2 (de) | Vorrichtung zur Verringerung der Achslast eines mehrachsigen fahrbaren Teleskopkranes | |
| DE202011052050U1 (de) | Einrichtung zur Reinigung von Oberflächen | |
| DE4417126C2 (de) | Kanalreinigungsfahrzeug | |
| DE3932555C2 (de) | ||
| EP3416912B1 (de) | Höhenzugang-auslegereinheit für eine mobile höhenzugangsmaschine, eine höhenzugangsmaschine und eine verwendung der höhenzugang-auslegereinheit | |
| DE102011002108A1 (de) | Krancontainer sowie Verfahren zum Betrieb eines Krancontainers | |
| DE102011055574B4 (de) | Einrichtung und Verfahren zur Reinigung von Oberflächen | |
| DE102009034271A1 (de) | Montage- und Wartungsfahrzeug für Solarmodule | |
| EP2377804A1 (de) | Mobilkran, insbesondere Mobilbaukran | |
| DE2517203A1 (de) | Autokran | |
| DE102009060996A1 (de) | Montagefahrzeug für Solarmodule | |
| EP1245523A1 (de) | Modular aufgebautes Materialumschlaggerät und Sockelement für derartiges Materialumschlaggerät | |
| DE2743373C3 (de) | Elektrokarren mit Ladeplattform und hinter dem Fahrersitz angeordnetem Hydraulikdrehkran |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66C 1/68 20060101ALI20110810BHEP Ipc: B66F 9/18 20060101ALI20110810BHEP Ipc: B66C 1/02 20060101AFI20110810BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20120315 |