EP1898193A1 - Kraftmessvorrichtung und Referenzeinheit - Google Patents
Kraftmessvorrichtung und Referenzeinheit Download PDFInfo
- Publication number
- EP1898193A1 EP1898193A1 EP06120100A EP06120100A EP1898193A1 EP 1898193 A1 EP1898193 A1 EP 1898193A1 EP 06120100 A EP06120100 A EP 06120100A EP 06120100 A EP06120100 A EP 06120100A EP 1898193 A1 EP1898193 A1 EP 1898193A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- unit
- ref
- lever
- force
- compensation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 claims abstract description 8
- 230000005540 biological transmission Effects 0.000 claims description 19
- 230000007246 mechanism Effects 0.000 claims description 10
- 230000003287 optical effect Effects 0.000 claims description 6
- 230000005484 gravity Effects 0.000 claims description 4
- 230000002452 interceptive effect Effects 0.000 claims 1
- 230000001105 regulatory effect Effects 0.000 abstract description 2
- 230000000694 effects Effects 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 230000001419 dependent effect Effects 0.000 description 5
- 239000004065 semiconductor Substances 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000009760 electrical discharge machining Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000005303 weighing Methods 0.000 description 2
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 241000482268 Zea mays subsp. mays Species 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 230000002146 bilateral effect Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004870 electrical engineering Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000013100 final test Methods 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 210000002023 somite Anatomy 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G23/00—Auxiliary devices for weighing apparatus
- G01G23/06—Means for damping oscillations, e.g. of weigh beams
- G01G23/10—Means for damping oscillations, e.g. of weigh beams by electric or magnetic means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G23/00—Auxiliary devices for weighing apparatus
- G01G23/01—Testing or calibrating of weighing apparatus
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G7/00—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups
- G01G7/02—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action
- G01G7/04—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action with means for regulating the current to solenoids
Definitions
- the invention relates to a force measuring device, in particular a balance, and a reference unit.
- the measuring accuracy of a force measuring device for example a balance with electromagnetic force compensation or strain gauge technology (see [1], Build Your Quality on Solid Ground!, Company Brochure, Mettler Toldeo GmbH, January 2001, pages 14-15 ) is determined by numerous influencing factors, which are described in [2], Weibelfibel, Mettler Toldeo GmbH, April 2001.
- An electronic balance with electromagnetic force compensation is for example in [7], DE 33 24 402 described.
- the electrical device of this balance has a reference voltage source with a zener diode, which is decisive for the determination of the compensation current.
- the properties of the zener diode are temperature-dependent, which is why a correction network compensates for thermal influences. In high-resolution scales with electromagnetic force compensation, therefore, not only the noise behavior, but also the temperature behavior of the reference or reference unit used is of particular importance.
- the present invention is therefore based on the object to provide an improved force measuring device and a reference unit, by means of which the above-mentioned problems are avoided.
- a force measuring device is to be provided which has a relatively inexpensive reference unit which serves to deliver a suitable precise reference variable, a reference current or a reference voltage.
- the force measuring device has a measuring unit and a reference unit, which is the output of a reference variable, a reference current or a reference voltage, serves, by means of which the force to be determined of a measurement object can be detected by the measuring unit and / or a corresponding analog signal can be digitized.
- the reference unit is a loaded with a reference mass force measuring device that generates a reference current according to the principle of electromagnetic force compensation, which is controllable by means of a measuring and control device such that it generates in a held by a reference lever first reference coil, a magnetic field, which with the Magnetic field of a reference magnet, preferably a permanent magnet cooperates such that a force acting on the reference lever, by means of which also acting on the reference lever, optionally translated by means of a lever mechanism force, the reference mass is compensated.
- the reference variable generated by means of the reference unit has only small system-immanent noise components and is therefore particularly well suited for use in measuring devices, in particular force measuring devices with very high resolution.
- force measuring devices according to the invention also externally acting disturbances, which act practically in phase on the measurement object and the reference mass automatically corrected, since not only the measurement signal of the force measuring device, but also the Reference size changed according to the force acting on the force measuring device disturbances. The changes caused by disturbances in the reference variable and in the measurement signal are proportional.
- the gravimetric reference unit according to the invention can also be produced inexpensively in comparison with an electronic reference unit, provided that it has comparable specifications.
- the reference current generated by means of the reference unit can, if necessary, be converted into a reference voltage or into a digital variable.
- the reference mass is preferably fixedly connected to the reference lever, so that disturbing moments are avoided, which could otherwise occur when moving the reference mass. Due to the absence of such disturbing moments, one is Lever, for example in the form of a parallelogram, not mandatory.
- the reference measuring unit can therefore be provided only with a lever, namely the reference lever, which carries the reference mass and the reference coil.
- the reference mass is preferably formed by the fixedly installed reference coil and the mass of the reference lever.
- the reference lever of the reference unit can be rotatably mounted at one end and held at the other end, on which the reference coil is provided, above the reference magnet.
- a disadvantage of this embodiment is that changes in the air pressure affect the reference signal.
- a reference lever is used, the volume components, including the volume fractions of the reference lever held by the reference coil (s), on both sides of the rotation and storage point compensate each other with respect to the buoyancy.
- To compensate for the volume of the reference coil of the reference lever is therefore designed accordingly or provided with a compensation body which is mounted at an appropriate distance on the other side of the reference lever. The buoyancy forces occurring on both sides of the bearing point are therefore at least approximately balanced even with changes in the air pressure.
- the force measuring device already has an imbalance in terms of lift due to the design of the measuring unit mechanism, this imbalance of the buoyancy in the measuring unit can be compensated by means of a partial compensation of the volume of the reference coil.
- the compensation body is exchangeable and / or the distance from the compensation body to the bearing point of the reference lever adjustable.
- this is preferably arranged in a gas-tight sealed housing.
- the problem of buoyancy can be solved in an encapsulated reference unit in a simple manner that the gas is evacuated within the gas-tight closed housing.
- signal components of the controlled variable whose frequency lies above a value from the range of preferably 10 Hz to 50 Hz are fed via a high-pass filter to a control unit, by means of which an amplifier, for example an impedance converter, can be controlled which controls a compensation current to a second reference coil connected to the reference lever, which generates a magnetic field which cooperates with the magnetic field of the reference magnet such that higher-frequency interference effects can be corrected.
- an amplifier for example an impedance converter
- Complex perturbations can therefore be quickly corrected by means of the second reference coil without affecting the compensation current used as a reference in the first reference coil.
- the reference current therefore remains largely free from high-frequency interference.
- the compensation current is fed via the second reference coil to an input of an integrator whose output is fed back to the input of the amplifier, wherein a control loop is formed which always returns the output signal of the integrator to the initial position. If a direct current component results in the second reference coil, this is integrated and fed back in phase to the input of the amplifier, whereby a constant offset applied there is compensated. This measure ensures that only interference-dependent currents flow in the second reference coil. By means of the current flowing in the first reference coil, therefore, a compensation force is generated, which alone and completely compensates for the force of the reference mass.
- the reference variable generated by the reference unit can be used in a variety of ways in a force measuring device.
- a reference voltage generated by the reference unit can be applied to a measuring bridge in a measuring unit operating according to the DMS principle.
- the reference current generated by the reference unit may be in a working according to the principle of electromagnetic force compensation measuring unit such alternately by an associated compensating lever held associated first and second compensation coil are connected, that a magnetic field results, which cooperates with the magnetic field of an associated permanent magnet system such that a force acts on the associated compensation lever on an associated lever mechanism, by means of which also on the Lever acting force of the DUT is compensated.
- a compensation current can be derived from the reference voltage output by the reference unit or the reference current and passed through only one reference coil, by means of which the force of the load to be measured is compensated.
- the inventively generated reference voltage or the reference current can also serve as a reference for a provided in the measuring unit AD converter, as described for example in [5], pages 1043-1062 (see also [6], page 4, Figure 8).
- the structure of the lever systems of the measuring unit and the reference unit is preferably carried out in an integrated design, are summarized in the held stationary parts of the measuring unit and the reference unit and shared.
- the measuring unit and the reference unit are realized by means of a monolithic power transmission device, in which the lever systems are incorporated.
- the at least one reference lever of the reference unit is preferably integrated into the stationary part of the parallelogram of the measuring unit.
- a shared magnet system is provided for the measuring unit and the reference unit. This initially reduces the cost, as can be dispensed with a separate reference magnet. Furthermore, the device be built even more compact. Furthermore, there are advantages in terms of temperature stabilization, which only needs to be realized for a magnet system. In addition, the effects of changes in the magnetic field of the magnet system, which can occur during temperature fluctuations, compensate each other.
- the temperature of the magnet systems and / or the coils of the measuring unit and / or the reference unit are preferably detected and used to correct the measured values. Possible deviations of the reference variable or the measurement results of the measuring unit, which are caused by temperature influences, can be compensated thereby.
- the reference unit does not necessarily have to be connected to the measuring unit.
- the reference unit can also be designed as a module. If deemed necessary, the modular reference unit may comprise at least one memory for storing specific data of the reference unit. For example, correction data from the final test or identification codes can be stored on this memory, which can then be retrieved by the processor unit of the force measuring device.
- the reference unit can be miniaturized, for example constructed as a microelectromechanical system (microelectromechanical system).
- a reference unit constructed in this way can have an electrical and mechanical interface which preferably has the same dimensions and the same pin layout as semiconductor references that are offered as integrated circuits by different manufacturers.
- such a fragile system as previously described also encapsulated gas-tight and the cavities created thereby are preferably evacuated.
- the reference unit described above can be used not only in force measuring devices, anywhere wherever appropriate, precise reference units are needed.
- measuring devices such as gravity acceleration measuring devices, acceleration sensors and the like, which are exposed to disturbing environmental vibrations, offers the present reference unit due to the Mitzu charged these vibrations great advantages. If the reference current using analog or digital filters is smoothed, the inventive reference unit can also be used in all other measuring devices.
- Figure 1 shows a working according to the principle of electromagnetic force compensation scale 1000, with a compensation coil 1 or two Compensation coils 1a, 1 b may be equipped by means of which in the push-pull operation time-displaced magnetic fields oppositely generated.
- the mechanical part of this balance 1 shown schematically in FIG. 1 comprises a fixed parallelogram leg 103 fixedly connected to the balance housing 1001, which is connected by means of two links 101 and 102 to a deflectable parallelogram leg 104, to which a cantilever F MO serving arm is attached 1041 is formed.
- the two Parallelogrammschenkel 103 and 104 are connected by Biegelager 110 with the two links 101 and 102.
- a magnet system 2 is fixed, which comprises a permanent magnet 21 with a pole plate 22 mounted thereon and a cup-shaped return body 23. From above, a coil 1 optionally protrudes two coil 1a, 1b in the air gap 25 between the return body 23 and the pole plate 22.
- the coil 1 and the coils 1a, 1b are attached to a compensation lever 105, which via a coupling element 1040 the Normal component of load F MO transmits.
- the compensation lever 105 is suspended by means of a flexure bearing 111 on a column 1033, which is fixed to the arm 1032 of the stationary parallelogram leg 103.
- Reference numeral 3 designates an optical scanning unit which detects the deviations of the compensation lever 105 from the desired position.
- a correction network provided with a temperature sensor 9 in the electrical device influences the mass of the load-dependent compensation current in such a way that the temperature dependence of the magnetic field strength of the magnet system is largely compensated.
- a balance of this type with only one compensation coil 1 is described for example in [7].
- the electrical device of the balance described there has a reference voltage source with a zener diode, which is decisive for the determination of the compensation current, by means of which a force is generated which compensates for the normal component of the load F MO .
- a reference current I REF is switched alternately such that a magnetic field results, which cooperates with the magnetic field of the magnet system 2 such that a force on the compensation lever 105 to the coupling element 1040th acting, which compensates the normal component of the load F Mo.
- the reference current I REF can be generated by means of a Zener diode.
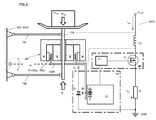
- the reference current I REF and / or an optionally derived therefrom reference voltage U REF are generated by means of a reference unit 100R, as shown schematically in Figure 2 in a simple embodiment.
- the reference unit 100R is a force measuring device which is loaded with a reference mass m REF and which generates the reference current I REF according to the principle of electromagnetic force compensation.
- the reference current I REF is controllable by means of a scanning unit 3R and a control device 4R in such a way that it generates a magnetic field in a reference coil 105R held by a reference lever 105 which interacts with the magnetic field of a reference magnet 2R such that a compensation force F K occurs the reference lever 105R acts, by means of which the reference force F REF of the reference mass m REF also acting on the reference lever 105R is compensated.
- the reference mass m REF is held by means of a lever mechanism 101, 102, 103, 104, of which the fixed lever 103 is formed by the housing 1001 of the force measuring device or the scale or the stand-alone reference unit 100R.
- Deviations of the reference lever 105R from the target position which are typically in the range of 1-2 nanometers, are detected by the optical scanning unit 3R.
- the optical scanning unit 3R has for this purpose a light source 31 and a photosensor provided with sensor unit 32, between which one with the Reference lever 105 R connected flag 38 is provided, which has a light opening through which the light emitted from the light source 31 to the sensor unit 32 passes.
- the sensor unit 32 which may have two light sensors as indicated, outputs a controlled variable to the control device 4. However, instead of two light sensors, the sensor unit 32 can also have other sensor units, for example photodiode arrays, PSD (Position Sensitive Device), a camera with image processing and the like.
- PSD Position Sensitive Device
- the control device 4 has a regulator module 41, for example with a PID characteristic, and a controllable resistor 42, by which the reference current I REF is set such that the reference lever 105R is always kept in the desired position in which the reference force F REF is completely compensated by the compensation force F K.
- the reference current I REF is conducted via a reference resistor 5, at which the reference voltage U REF occurs, to ground GND.
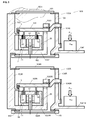
- FIG. 3 shows a measuring unit 100a operating according to the above-described principle of electromagnetic force compensation and a reference unit 100R configured almost identically.
- the electrical and electronic parts of the measuring unit 100a and the reference unit 100R correspond, for example, to the embodiment of FIG. 9.
- Both units 100, 100R are provided with a parallelogram consisting of the elements 101, 102, 103, 104 or 101R, 102R, 103R, 104R, which allows only the normal component of the load m MO or m REF to be transmitted to the coupling element 1040 or 1040R.
- a change in the position of the load mmo or m REF on the respective arm 1041, 1041 R therefore has no influence on the measurement.
- This relatively complex embodiment of the reference unit 100R is then provided if the reference mass m REF is to be optionally interchangeable.
- FIG. 4 shows the force-measuring device 1000 of FIG. 3 with a reference unit 100R configured in a more simple manner, which instead of a lever mechanism has only one reference lever 105R which carries the reference coil 1R serving as reference mass m REF at one end and a bearing element at the other end 111R is held. Since the reference mass m REF should not be interchangeable in this embodiment, it can be arbitrarily selected and arranged. As shown in Figure 4, therefore, the reference coil 1R itself is used as the reference mass m REF , whereby an extremely simple embodiment of the reference unit 100R results.
- V1 includes the entire volume of the reference coil 1 R and the reference lever 105 R on the one side of the bearing member 111 R.
- the distance s1 is the corresponding center of gravity distance from the bearing element 111R.
- V2 includes the volume of the reference lever 105R on the other side of the bearing element 111R and the volume of the compensation body 1050R.
- the distance s2 is the corresponding center of gravity distance.
- the distance s F is the distance of the resulting reference force F REF from the pivot point or from the bearing element 111 R.
- the volumes V1 and V2 are the external volume of the reference lever 105R relevant for the air displacement.
- rotational moments should be small. Since the moments of inertia with respect to rotation depend quadratically on the distance, the distance s2 should therefore be as short as possible, whereby, however, the volume V2 of the compensation body 1050R increases correspondingly.
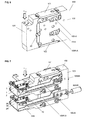
- the monolithic power transmission device 150 comprises the elements 101, 102, 103, 104 of a parallelogram, as already shown schematically in FIG.
- a fixed Parallelogrammschenkel 103 is connected by means of two links 101 and 102 with a deflectable Parallelogrammschenkel 104, on which the force to be measured F MO of the test object will act and which is provided via a coupling element 29 with the provided within the monolithic power transmission device 150 part 105-A of Compensating lever 105 is connected.
- a part 105R-A of the reference lever 105R with the associated bearing element 111 R is incorporated in the fixed parallelogram leg 103.
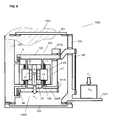
- FIG. 7 shows the monolithic power transmission device 150 of FIG. 6 equipped with a compensation coil 1, a reference coil 1R, magnetic systems 2 and 2R, optical scanning units 3, 3R for the measuring unit 100 and the reference unit 100R.
- the trained in the monolithic Power transmission device 150 integrated first parts 105-A and 105R-A of the compensation lever 105 and the reference lever 105R are both sides of the monolithic power transmission device 150 each screwed to second parts 105-B and 105R-B of the compensation lever 105 and the reference lever 105R, which the compensation coil or the reference coil 1 R hold over the associated magnet system 2, 2 R, which is held by a screwed with the monolithic power transmission device 150 support lever 20 and 20R.
- the magnetic systems 2, 2R could be provided on opposite sides.
- the present embodiment has the advantage that acting mechanical disturbances are detected by the measuring unit 100 and the reference unit 100R in the same way and thereby compensated.
- monolithic power transmission devices 150 having multi-lever ratios may also be used. (The load cell shown has 2 levers, but only one lever or several levers can be used)
- One or more reference units 103 can be realized in a particularly simple manner using a monolithically designed force transmission device, which optionally generate a plurality of reference signals for a force measuring device 1000 or further measuring devices.
- FIG. 8 shows a force measuring device 1000 with a measuring unit 100 and a reference unit 100R which share a magnet system 2-2R.
- the device for example the monolithic power transmission device 150 shown in FIG. 6, can be made even simpler and more compact.
- the magnet system 2-2R has an annular air gap on both sides, into which the compensation coil 1 or the reference coil 1 R can dip.
- the carrier 1033 of the magnet system 2-2R is for this purpose with a
- temperature compensation is required only for a magnet system 2-2R. Furthermore, changes in the magnetic flux to the measuring unit 100 and the reference unit 100R have the same effect, so that any changes even compensate.
- the first measuring unit 100a operating according to the push / pull principle has a modulator 400 which emits a digital signal which is pulse width modulated or modulated according to the sigma-delta ( ⁇ - ⁇ ) method.
- the two methods mentioned (PWM and ⁇ - ⁇ ) are for example in [8], R. Esslinger, G. Gruhler, RW Stewart, Digital Power Amplification based on Pulse-Width Modulation and Sigma-Delta Loops, Signal Processing Division, Dept. of Electronic and Electrical Engineering, University of Strathclyde, Glasgow G1 1XW , Scotland.
- an analog control signal s A output by the control unit 4 is converted into pairs of mutually complementary pulses whose widths are regulated in accordance with the load to be compensated and equal in sum to "1".
- the switches 42a and 42b are actuated. If the width of the first pulse is equal to "1”, the balance is not loaded. If the widths of both pulses are equal, half load is present and if the width of the second pulse equals "1", full load is present. By counting the width of one of the pulses, therefore, the height of the load can be determined.
- an analog control signal s A delivered by the control unit 4 is converted into a sequence of pulses of the value "0" and "1" of selectable number, whose mean value corresponds to the value of the analog control signal s A.
- the ratio of zeros and ones therefore corresponds to the height of the load F MO .
- signal components of the controlled variable whose frequency lies above a value in the range of preferably 10 Hz-50 Hz are fed via a high-pass filter 43 to a control unit 44 whose output signal via a resistor 45 does not Inverting input of an impedance connected as an operational amplifier 46 is supplied.
- a corresponding compensation current I K is delivered to a second reference coil 1Rb connected to the compensation lever 105R, by means of which a magnetic field cooperates with the magnetic field of the reference magnet 2R so that higher-frequency interference effects are corrected. Interference effects can therefore be quickly corrected by means of the second reference coil 1 Rb without the reference current I REF in the first reference coil 1 Ra being impaired.
- the reference current I REF or the optionally derived therefrom reference voltage U REF therefore remains largely free of interference.
- the compensation current I K conducted through the second reference coil 1Rb is fed to the inverting input of an integrator 47, the output of which via a resistor 48 to the non-inverting input of the operational amplifier 46 is returned, wherein a control loop is formed, which always returns the output signal of the integrator 47 in the initial position.
- the integrator is designed as an operational amplifier 47, the output of which is connected via a resistor 471 and a capacitor 472 to its inverting input.
- a DC component resulting in the second reference coil 1Rb is therefore integrated and fed back in phase to the non-inverting input of the operational amplifier 47, whereby a constant offset applied there is compensated.
- This measure will ensure that in the second reference coil R1b only currents flow, which depend on the acting, high-frequency interference and not serve the force compensation.
- the force measuring device 1 according to the invention which is preferably used as a balance, has been described and illustrated in preferred embodiments.
- reference units according to the invention can advantageously be used in conjunction with any other gravimetric or other measuring devices.
- the electro-mechanical design and the design of the electronics of the reference unit 100R and the measuring unit 100 of the force-measuring device 1000 have been simplified in part or illustrated in exemplary embodiments.
- the solution according to the invention can be used in any embodiment of the reference unit 100R and of the measuring unit 100, in particular any lever systems, measuring devices, magnet systems, coil systems and control devices that are designed as desired.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measuring Fluid Pressure (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
Description
- Die Erfindung betrifft eine Kraftmessvorrichtung, insbesondere eine Waage, sowie eine Referenzeinheit.
- Die Messgenauigkeit einer Kraftmessvorrichtung, beispielsweise einer Waage mit elektromagnetischer Kraftkompensation oder DMS-Technologie (siehe [1], Bauen Sie Ihre Qualität auf solidem Grund!, Firmenbrochure, Mettler Toldeo GmbH, Januar 2001, Seiten 14-15) wird durch zahlreiche Einflussfaktoren bestimmt, die in [2], Wägefibel, Mettler Toldeo GmbH, April 2001 beschrieben sind.
- Bei Waagen aller Art sind mechanische Einwirkungen, wie Vibrationen oder Stösse besonders störend, weshalb Filter vorgesehen werden, die der Beseitigung von störenden Signalanteilen dienen. Beispielsweise in [3],
US 2004/0088342 A1 und [4],US 6,271,484 B1 sind Verfahren beschrieben, bei denen vom Messumformer einer Kraftmessvorrichtung abgegebene Signale mittels digitaler Filter bearbeitet werden. - Bei Kraftmessvorrichtungen mit sehr hohen Auflösungen, bei denen eine Messgrösse erfasst und mittels eines Analog/Digital (AD)-Wandlers in ein digitales Signal gewandelt wird, ist ferner eine sehr präzise Referenz, eine Referenzspannung oder ein Referenzstrom, erforderlich. In [5], U. Tietze, Ch. Schenk, Halbleiterschaltungstechnik, 11. Auflage, 1. Nachdruck, Springer Verlag, Berlin 1999, Seiten 1043-1062 sind verschiedene AD-Wandler gezeigt, die alle mit einer Referenzspannung UREF versorgt werden. Beispielsweise anhand des in [5], Seite 1047-1048 beschriebenen Parallelverfahrens ist leicht ersichtlich, dass die erreichbare Auflösung bei der AD-Wandlung eines analogen Signals von der Stabilität der Referenzspannung UREF abhängig ist.
- In [6], Albert O'Grady, Transducer/Sensor Excitation and Measurement Techniques, Analog Dialogue 34-5 (2000) sind Messbrücken beschrieben, wie sie in Waagen mit DMS-Technologie verwendet werden. In [6], Seite 4, Figur 8 ist gezeigt, dass die Signale an den Mittelabgriffen der Messbrücke mittels eines Sigma-Delta A/D Wandlers in ein digitales Signal gewandelt werden können, wobei die an der Messbrücke anliegenden Spannungen dem Sigma-Delta A/D Wandler als Referenzspannungen zugeführt werden (hinsichtlich der Arbeitsweise von Messbrücken siehe auch [5], Seiten 1241 und 1243).
- Während bei Waagen mit DMS-Technologie Auflösungen erzielt werden, für die konventionell erzeugte Referenzspannungen normalerweise genügen, werden bei Kraftmessvorrichtungen mit elektromagnetischer Kraftkompensation, die deutlich höhere Auflösungen aufweisen können, Referenzspannungen benötigt, welche eine höhere Stabilität und geringeres Rauschen aufweisen. Besonders aufwendig ist beispielsweise die Unterdrückung von so genanntem Popcorn-Rauschen, das typischerweise durch Halbleiter verursacht wird, welche in den Übergangszonen metallische Verunreinigungen aufweisen.
- Eine elektronische Waage mit elektromagnetischer Kraftkompensation ist beispielsweise in [7],
DE 33 24 402 beschrieben. Die elektrische Einrichtung dieser Waage weist eine Referenzspannungsquelle mit einer Zener-Diode auf, die für die Bestimmung des Kompensationsstromes massgebend ist. Die Eigenschaften der Zener-Diode sind temperaturabhängig, weshalb ein Korrekturnetzwerk thermische Einflüsse kompensiert. Bei hochauflösenden Waagen mit elektromagnetischer Kraftkompensation ist daher nicht nur das Rauschverhalten, sondern auch das Temperaturverhalten der verwendeten Referenz bzw. Referenzeinheit von besonderer Bedeutung. - Der vorliegenden Erfindung liegt daher die Aufgabe zugrunde, eine verbesserte Kraftmessvorrichtung sowie eine Referenzeinheit anzugeben, mittels derer die oben genannten Probleme vermieden werden. Insbesondere ist eine Kraftmessvorrichtung zu schaffen, welche eine relativ kostengünstige Referenzeinheit aufweist, die der Abgabe einer geeigneten präzisen Referenzgrösse, eines Referenzstromes oder einer Referenzspannung, dient.
- Diese Aufgabe wird mit einer Kraftmessvorrichtung sowie einer Referenzeinheit gelöst, welche die in Anspruch 1 bzw. 11 angegebenen Merkmale aufweisen. Vorteilhafte Ausgestaltungen der Erfindung sind in weiteren Ansprüchen angegeben.
- Die Kraftmessvorrichtung weist eine Messeinheit und eine Referenzeinheit auf, die der Abgabe einer Referenzgrösse, eines Referenzstromes oder einer Referenzspannung, dient, mittels der die zu bestimmende Kraft eines Messobjekts von der Messeinheit erfassbar und/oder ein entsprechendes analoges Signal digitalisierbar ist.
- Erfindungsgemäss ist die Referenzeinheit eine mit einer Referenzmasse belastete Kraftmessvorrichtung, die nach dem Prinzip der elektromagnetischen Kraftkompensation einen Referenzstrom erzeugt, der mittels einer Mess- und Regelvorrichtung derart regelbar ist, dass er in einer von einem Referenzhebel gehaltenen ersten Referenzspule ein Magnetfeld erzeugt, welches mit dem Magnetfeld eines Referenzmagneten, vorzugsweise eines Permanentmagneten derart zusammenwirkt, dass eine Kraft auf den Referenzhebel einwirkt, mittels der die ebenfalls auf den Referenzhebel einwirkende, gegebenenfalls mittels eines Hebelwerks übersetzte Kraft, der Referenzmasse kompensierbar ist.
- Die mittels der Referenzeinheit erzeugte Referenzgrösse weist nur geringe systemimmanente Störanteile auf und ist daher für die Anwendung in Messgeräten, insbesondere Kraftmessvorrichtungen mit sehr hoher Auflösung besonders gut geeignet. Nebst der Vermeidung von systemimmanenten Störungen die bei Referenzquellen auf Basis der Halbleitertechnik auftreten, werden bei Kraftmessvorrichtungen erfindungsgemäss auch von aussen einwirkende Störungen, die praktisch phasengleich auf das Messobjekt und die Referenzmasse einwirken automatisch korrigiert, da sich nicht nur das Messsignal der Kraftmessvorrichtung, sondern auch die Referenzgrösse entsprechend den auf die Kraftmessvorrichtung einwirkenden Störungen verändert. Die durch Störungen verursachten Änderungen in der Referenzgrösse und im Messsignal verlaufen nämlich proportional.
- Die erfindungsgemässe gravimetrische Referenzeinheit kann im Vergleich zu einer elektronischen Referenzeinheit, sofern diese vergleichbare Spezifikationen aufweisen soll, zudem kostengünstig hergestellt werden.
- Der mittels der Referenzeinheit erzeugte Referenzstrom kann bedarfsweise in eine Referenzspannung oder in eine digitale Grösse gewandelt werden.
- Die Referenzmasse wird vorzugsweise fest mit dem Referenzhebel verbunden, so dass störende Momente vermieden werden, die beim Verschieben der Referenzmasse ansonsten auftreten könnten. Aufgrund des Fehlens solch störender Momente, ist ein Hebelwerk, beispielsweise in Form eines Parallelogramms, nicht zwingend notwendig. Die Referenzmesseinheit kann daher nur mit einem Hebel, nämlich dem Referenzhebel versehen werden, der die Referenzmasse und die Referenzspule trägt. Die Referenzmasse wird dabei vorzugsweise durch die fest installierte Referenzspule und die Masse des Referenzhebels gebildet. Durch die Masse der Referenzspule wird der Referenzhebel nach unten gedrückt und durch das in der Referenzspule mittels des Kompensationsstroms gebildete Magnetfeldes, welches mit dem Referenzmagneten zusammenwirkt, gleichzeitig nach oben gedrückt und somit in der Balance gehalten.
- Prinzipiell kann der Referenzhebel der Referenzeinheit daher an einem Ende drehbar gelagert und mit dem anderen Ende, an dem die Referenzspule vorgesehen ist, über dem Referenzmagneten gehalten werden. Nachteilig bei dieser Ausgestaltung ist jedoch, dass Änderungen des Luftdrucks das Referenzsignal beeinflussen. In einer weiteren vorzugsweisen Ausgestaltung der Erfindung wird daher ein Referenzhebel verwendet, dessen Volumenanteile, einschliesslich der Volumenanteile der vom Referenzhebel gehaltenen Referenzspule(n), beidseits des Dreh- und Lagerpunkts einander bezüglich des Auftriebs kompensieren. Zur Kompensation des Volumens der Referenzspule wird der Referenzhebel daher entsprechend ausgestaltet oder mit einem Kompensationskörper versehen, der in einem passenden Abstand auf der anderen Seite des Referenzhebels montiert wird. Die beidseits des Lagerpunkts auftretenden Auftriebskräfte sind daher auch bei Änderungen des Luftdrucks zumindest annähernd ausbalanciert.
- Sofern aber die Kraftmessvorrichtung durch die Auslegung der Messeinheit-Mechanik bereits ein Ungleichgewicht bezüglich des Auftriebs aufweist, kann mittels einer teilweisen Kompensation des Volumens der Referenzspule dieses Ungleichgewicht des Auftriebs in der Messeinheit ausgeglichen werden. Damit baugleiche Referenzeinheiten in verschiedenen Kraftmessvorrichtungen verwendet werden können, ist vorzugsweise der Kompensationskörper austauschbar und/oder der Abstand vom Kompensationskörper zum Lagerpunkt des Referenzhebels einstellbar.
- Um die Referenzeinheit möglichst vor Umgebungseinflüssen zu schützen, ist diese vorzugsweise in einem gasdicht verschlossenen Gehäuse angeordnet.
- Die Problematik des Auftriebs kann bei einer gekapselten Referenzeinheit auf einfache Weise dadurch gelöst werden, dass das Gas innerhalb des gasdicht verschlossenen Gehäuses evakuiert wird.
- In einer weiteren vorzugsweisen Ausgestaltung der Referenzeinheit werden Signalanteile der Regelgrösse, deren Frequenz oberhalb eines Wertes aus dem Bereich von vorzugsweise 10 Hz - 50 Hz liegt, über ein Hochpassfilter einer Regeleinheit zugeführt, mittels der ein Verstärker, beispielsweise ein Impedanzwandler steuerbar ist, der einen Kompensationsstrom an eine mit dem Referenzhebel verbundene zweite Referenzspule abgibt, welcher ein Magnetfeld erzeugt, das mit dem Magnetfeld des Referenzmagneten derart zusammenwirkt, dass höherfrequente Störeinwirkungen korrigierbar sind. Komplexe Störeinwirkungen sind mittels der zweiten Referenzspule daher rasch korrigierbar, ohne dass der als Referenz dienende Kompensationsstrom in der ersten Referenzspule beeinträchtigt wird. Der Referenzstrom bleibt daher weitgehend frei von hochfrequenten Störungen.
- In einer weiteren vorzugsweisen Ausgestaltung der Referenzeinheit wird der Kompensationsstrom über die zweite Referenzspule einem Eingang eines Integrators zugeführt, dessen Ausgang auf den Eingang des Verstärkers zurückgeführt ist, wobei eine Regelschleife gebildet wird, die das Ausgangssignal des Integrators stets in die Ausgangslage zurückführt. Sofern in der zweiten Referenzspule nämlich ein Gleichstromanteil resultiert, wird dieser integriert und phasenrichtig an den Eingang des Verstärkers zurückgeführt, wodurch ein dort anliegender, konstanter Offset kompensiert wird. Durch diese Massnahme wird sichergestellt, dass in der zweiten Referenzspule nur störungsabhängige Ströme fliessen. Mittels des in der ersten Referenzspule fliessenden Stroms wird daher eine Kompensationskraft erzeugt, welche die Kraft der Referenzmasse alleine und vollständig kompensiert.
- Die von der Referenzeinheit erzeugte Referenzgrösse kann in einer Kraftmessvorrichtung verschiedenartig verwendet werden. Beispielsweise kann eine von der Referenzeinheit erzeugte Referenzspannung in einer nach dem DMS-Prinzip arbeitenden Messeinheit an eine Messbrücke angelegt werden.
- Der von der Referenzeinheit erzeugte Referenzstrom kann in einer nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitenden Messeinheit derart alternierend durch eine von einem zugehörigen Kompensationshebel gehaltene zugehörige erste und zweite Kompensationsspule geschaltet werden, dass ein Magnetfeld resultiert, welches mit dem Magnetfeld eines zugehörigen Permanentmagnetsystems derart zusammenwirkt, dass eine Kraft über den zugehörigen Kompensationshebel auf ein zugehöriges Hebelwerk einwirkt, mittels der die ebenfalls auf das Hebelwerk einwirkende Kraft des Messobjekts kompensiert wird.
- Ferner kann aus der von der Referenzeinheit abgegebenen Referenzspannung oder dem Referenzstrom ein Kompensationsstrom abgeleitet und durch nur eine Referenzspule geführt werden, mittels dessen die Kraft der zu messenden Last kompensiert wird.
- Die erfindungsgemäss erzeugte Referenzspannung oder der Referenzstrom kann ferner als Referenz für einen in der Messeinheit vorgesehenen AD-Wandler dienen, wie dies beispielsweise in [5], Seiten 1043-1062 beschrieben ist (siehe auch [6], Seite 4, Figur 8).
- Der Aufbau der Hebelsysteme der Messeinheit und der Referenzeinheit erfolgt vorzugsweise in integrierter Bauweise, bei der stationär gehaltene Teile der Messeinheit und der Referenzeinheit zusammengefasst und gemeinsam genutzt werden. Vorzugsweise werden die Messeinheit und die Referenzeinheit mittels einer monolithisch ausgebildeten Kraftübertragungsvorrichtung realisiert, in der die Hebelsysteme eingearbeitet sind. Um eine möglichst kompakte Ausgestaltung der Kraftmessvorrichtung zu erhalten, wird der wenigstens eine Referenzhebel der Referenzeinheit vorzugsweise in den feststehenden Teil des Parallelogramms der Messeinheit integriert. Durch diese Bauweise, mit Verwendung einer durch Funkenerosionstechnik bearbeiteten monolithisch ausgebildeten Kraftübertragungsvorrichtung, kann die Referenzeinheit mit nur geringem Mehraufwand gefertigt und mit minimalem Platzbedarf in die Kraftmessvorrichtung integriert werden.
- In einer weiteren vorzugsweisen Ausgestaltung der Kraftmessvorrichtung wird für die Messeinheit und die Referenzeinheit ein gemeinsam genutztes Magnetsystem vorgesehen. Dadurch reduziert sich vorerst der Kostenaufwand, da auf einen separaten Referenzmagneten verzichtet werden kann. Ferner kann die Vorrichtung noch kompakter gebaut werden. Weiterhin resultieren Vorteile hinsichtlich der Temperaturstabilisierung, die nur für ein Magnetsystem realisiert werden muss. Zudem kompensieren sich die Auswirkungen von Änderungen des Magnetfeldes des Magnetsystems, die bei Temperaturschwankungen auftreten können.
- Die Temperatur der Magnetsysteme und/oder der Spulen der Messeinheit und/oder der Referenzeinheit werden vorzugsweise erfasst und zur Korrektur der Messwerte verwendet. Allfällige Abweichungen der Referenzgrösse oder der Messergebnisse der Messeinheit, die durch Temperatureinflüsse verursacht werden, können dadurch kompensiert werden.
- Die Referenzeinheit muss nicht zwingend mit der Messeinheit verbunden sein. Die Referenzeinheit kann auch als Modul ausgestaltet sein. Sofern es notwendig erscheint, kann die modulare Referenzeinheit mindestens einen Speicher zur Speicherung spezifischer Daten der Referenzeinheit aufweisen. Beispielsweise können Korrekturdaten aus der Endprüfung oder Identifikationscodes auf diesem Speicher abgelegt sein, welche dann durch die Prozessoreinheit der Kraftmessvorrichtung abgerufen werden können.
- Des Weiteren kann die Referenzeinheit miniaturisiert, beispielsweise als Mikroelektromechanisches System (Micro- Electro- Mechanical- System) aufgebaut sein. Eine solcherart aufgebaute Referenzeinheit kann eine elektrische und mechanische Schnittstelle aufweisen, welche vorzugsweise dieselben Dimensionen und dieselbe Pinbelegung hat wie Halbleiterreferenzen, die als integrierte Schaltkreise von verschiedenen Herstellern angeboten werden. Vorzugsweise ist ein derart fragiles System wie bereits vorangehend beschrieben, ebenfalls gasdicht gekapselt und die dadurch geschaffenen Hohlräume sind vorzugsweise evakuiert.
- Die vorangehend beschriebene Referenzeinheit kann nicht nur in Kraftmessvorrichtungen verwendet werden, somndern überall dort, wo entsprechende, präzise Referenzeinheiten benötigt werden. Insbesondere Messgeräte wie beispielsweise Erdbeschleunigungs-Messvorrichtungen, Beschleunigungssensoren und dergleichen, welche störenden Umgebungsschwingungen ausgesetzt sind, bietet die vorliegende Referenzeinheit aufgrund der Miterfassung dieser Schwingungen grosse Vorteile. Sofern der Referenzstrom mittels analoger oder digitaler Filter geglättet wird, kann die erfindungsgemässe Referenzeinheit auch in allen anderen Messgeräten verwendet werden.
- Nachfolgend wird die Erfindung anhand von Zeichnungen näher erläutert. Dabei zeigt:
- Figur 1
- eine nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitende Kraftmessvorrichtung 1000, die mit einer Kompensationsspule 1 oder mit zwei Kompensationsspulen 1a, 1b ausgerüstet sein kann, mittels derer im Push-Pull-Betrieb zeitversetzt einander entgegen gerichtete Magnetfelder erzeugt werden;
- Figur 1a
- die beiden Kompensationsspulen 1a, 1b mit Schaltmitteln 42a, 42b, mittels derer zueinander komplementäre, in Abhängigkeit der zu kompensierenden Last FMO sigma-delta- oder pulsweitenmodulierte Anteile eines Referenzstroms IREF durch die Referenzspulen 1a, 1b geführt werden;
- Figur 2
- in schematischer Darstellung, eine nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitende Referenzeinheit 100R, mittels der ein Referenzstrom lREF für eine Messeinheit 100, beispielsweise die Schaltungsanordnung von Figur 1a erzeugt wird;
- Figur 3
- das elektromechanische System einer erfindungsgemässen Kraftmessvorrichtung 1000, die eine nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitende Messeinheit 100 und eine fast identisch ausgestaltete Referenzeinheit 100R aufweist, die wahlweise mit verschiedenen Referenzmassen mREF belastbar ist;
- Figur 4
- die Kraftmessvorrichtung 1000 von Figur 3 mit einer einfacher ausgestalteten Referenzeinheit 100R, die anstelle eines Hebelwerks lediglich einen Referenzhebel 105R aufweist, der an einem Ende die als Referenzmasse mREF dienende Referenzspule 1R trägt und der am anderen Ende drehbar gelagert und somit Auftriebskräften ausgesetzt ist, die vom Luftdruck abhängig sind;
- Figur 5
- die Kraftmessvorrichtung 1000 von Figur 4 mit einer vorzugsweise ausgestalteten Referenzeinheit 100R, deren Referenzhebel 105R auf der einen Seite des Lagerpunktes 111R die als Referenzmasse mREF dienende Referenzspule 1R und der anderen Seite des Lagerpunktes 111 R einen Kompensationskörper 1050R, beispielsweise ein Kompensationsgefäss, trägt, mittels dessen die Volumina des Referenzhebels 105R und der damit verbundenen Teile auf beiden Seiten des Lagerpunktes 111 R ausbalanciert werden;
- Figur 6
- einen mit Hebelwerken für eine Messeinheit 100 und eine Referenzeinheit 100R versehenen monolithisch ausgebildete Kraftübertragungsvorrichtung 150;
- Figur 7
- die monolithisch ausgebildete Kraftübertragungsvorrichtung 150 von Figur 6 bestückt mit einer Kompensationsspule 1, einer Referenzspule 1 R, Magnetsystemen 2, 2R, und mit optischen Abtasteinheiten 3, 3R für die Messeinheit 100 und die Referenzeinheit 100R, für die zudem zwei Kompensationskörper 1050R vorgesehen sind;
- Figur 8
- eine Kraftmessvorrichtung 1000 mit einer Messeinheit 100 und einer Referenzeinheit 100R, die ein Magnetsystem 2-2R gemeinsam benutzen;
- Figur 9
- die Referenzeinheit 100R beispielsweise gemäss einer der Figuren 2 bis 8, welche einerseits einen Referenzstrom IREF erzeugt, der in einer nach dem Push/Pull Prinzip arbeitenden ersten Messeinheit 100a als Referenz verwendet wird, und welche andererseits eine Referenzspannung UREF erzeugt, die in einer zweiten Messeinheit 100b als Betriebsspannung für eine Messbrücke und in einer dritten Messeinheit 100c als Referenz für einen AD-Wandler verwendet wird; und
- Figur 10
- eine Referenzeinheit 100R gemäss einer der Figuren 2 bis 8, die mit einer zweiten Referenzspule 1 Rb und einem zugehörigen Regelsystem ergänzt wurde, mittels dessen höherfrequente Störungen kompensierbar sind, ohne den in der ersten Referenzspule 1Ra geführten Referenzstrom IREF zu beeinträchtigen.
- Figur 1 zeigt eine nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitende Waage 1000, die mit einer Kompensationsspule 1 oder mit zwei Kompensationsspulen 1a, 1 b ausgerüstet sein kann, mittels derer im Push-Pull-Betrieb zeitversetzt einander entgegen gerichtete Magnetfelder erzeugt werden.
- Der in Figur 1 schematisch dargestellte mechanische Teil dieser Waage 1 umfasst einen mit dem Waagengehäuse 1001 fest verbundenen, feststehenden Parallelogrammschenkel 103, der mittels zweier Lenker 101 und 102 mit einem auslenkbaren Parallelogrammschenkel 104 verbunden ist, an dem ein der Aufnahme einer Last FMO dienender Ausleger 1041 angeformt ist. Die beiden Parallelogrammschenkel 103 und 104 sind durch Biegelager 110 mit den beiden Lenkern 101 und 102 verbunden. An einem Ausleger 1032 des feststehenden Parallelogrammschenkels 103 ist ein Magnetsystem 2 befestigt, welches einen Permanentmagneten 21 mit einer darauf aufgesetzten Polplatte 22 sowie einen topfförmigen Rückschlusskörper 23 umfasst. Von oben ragt eine Spule 1 gegebenenfalls zwei Spule 1a, 1 b in den Luftspalt 25 zwischen dem Rückschlusskörper 23 und der Polplatte 22. Die Spule 1 bzw. die Spulen 1a, 1 b sind an einem Kompensationshebel 105 befestigt, welcher über ein Koppelelement 1040 die Normalkomponente der Last FMO überträgt. Der Kompensationshebel 105 ist mittels eines Biegelagers 111 an einer Säule 1033 aufgehängt, welche am Ausleger 1032 des feststehenden Parallelogrammschenkels 103 befestigt ist. Mit Bezugszeichen 3 ist eine optische Abtasteinheit bezeichnet, welche die Abweichungen des Kompensationshebels 105 von der Soll-Lage erfasst.
- Ein mit einem Temperaturfühler 9 versehenes Korrekturnetzwerk in der elektrischen Einrichtung beeinflusst das Mass des lastabhängigen Kompensationsstromes in der Weise, dass die Temperaturabhängigkeit der magnetischen Feldstärke des Magnetsystems weitgehend kompensiert wird.
- Eine Waage dieser Art mit nur einer Kompensationsspule 1 ist beispielsweise in [7] beschrieben. Die elektrische Einrichtung der dort beschriebenen Waage weist eine Referenzspannungsquelle mit einer Zener-Diode auf, die für die Bestimmung des Kompensationsstromes massgebend ist, mittels dessen eine Kraft erzeugt wird, welche die Normalkomponente der Last FMO kompensiert.
- Bekannt sind ferner nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitende Kraftmessvorrichtungen mit zwei von einem zugehörigen Kompensationshebel 105 gehaltenen Kompensationsspulen 1a, 1b (siehe Figur 1a), durch die ein Referenzstrom IREF derart alternierend geschaltet wird, dass ein Magnetfeld resultiert, welches mit dem Magnetfeld des Magnetsystems 2 derart zusammenwirkt, dass eine Kraft über den Kompensationshebel 105 auf das Koppelelement 1040 einwirkt, welche die Normalkomponente der Last FMo kompensiert. Auch bei dieser Ausgestaltung der Kraftmessvorrichtung oder Waage kann der Referenzstrom IREF mittels einer Zener-Diode erzeugt werden.
- Die Nachteile der Erzeugung einer Referenzspannung oder eines Referenzstroms mittels einer Zener-Diode oder weiteren Halbleiterbauteilen, sind oben beschrieben.
- Erfindungsgemäss werden der Referenzstrom IREF und/oder eine gegebenenfalls daraus abgeleitete Referenzspannung UREF mittels einer Referenzeinheit 100R erzeugt, wie sie in Figur 2 in einer einfachen Ausgestaltung schematisch dargestellt ist. Die Referenzeinheit 100R ist eine mit einer Referenzmasse mREF belastete Kraftmessvorrichtung, welche den Referenzstrom IREF nach dem Prinzip der elektromagnetischen Kraftkompensation erzeugt. Der Referenzstrom IREF ist mittels einer Abtasteinheit 3R und einer Regelvorrichtung 4R dabei derart regelbar, dass er in einer von einem Referenzhebel 105R gehaltenen ersten Referenzspule 1 R ein Magnetfeld erzeugt, welches mit dem Magnetfeld eines Referenzmagneten 2R derart zusammenwirkt, dass eine Kompensationskraft FK auf den Referenzhebel 105R einwirkt, mittels der die ebenfalls auf den Referenzhebel 105R einwirkende Referenzkraft FREF der Referenzmasse mREF kompensiert wird. Die Referenzmasse mREF ist mittels eines Hebelwerks 101, 102, 103, 104 gehalten, von dem der feststehende Hebel 103 durch das Gehäuse 1001 der Kraftmessvorrichtung bzw. der Waage oder der alleinstehenden Referenzeinheit 100R gebildet ist. Schematisch ist gezeigt, dass der Referenzhebel 105R virtuell in einer unendlich weiten Distanz drehbar gelagert ist, weshalb Verschiebungen der Referenzmasse in der Waagschale ohne Bedeutung sind. Ferner ist gezeigt, dass die Kompensationskraft FK axial in Gegenrichtung zur Referenzkraft FREF verläuft und diese vollständig kompensiert.
- Abweichungen des Referenzhebels 105R von der Solllage, die typischerweise im Bereich von 1-2 Nanometer liegen, werden mittels der optischen Abtasteinheit 3R erfasst. Die optische Abtasteinheit 3R weist dazu eine Lichtquelle 31 und eine mit Lichtsensoren versehene Sensoreinheit 32 auf, zwischen denen eine mit dem Referenzhebel 105R verbundene Fahne 38 vorgesehen ist, die eine Lichtöffnung aufweist, durch die das von der Lichtquelle 31 abgegebene Licht zur Sensoreinheit 32 gelangt. Die Sensoreinheit 32, welche wie angedeutet zwei Lichtsensoren aufweisen kann, gibt eine Regelgrösse an die Regelvorrichtung 4 ab. Die Sensoreinheit 32 kann aber an Stelle zweier Lichtsensoren auch andere Sensoreinheiten aufweisen, beispielsweise Photodiodenarrays, PSD (Position Sensitive Device) eine Kamera mit Bildverarbeitung und dergleichen. Die Regelvorrichtung 4 weist einen Reglerbaustein 41, beispielsweise mit einer PID-Charakteristik, und einen regelbaren Widerstand 42 auf, durch den der Referenzstrom IREF derart eingestellt wird, dass der Referenzhebel 105R immer in der Soll-Lage gehalten wird, in der die Referenzkraft FREF durch die Kompensationskraft FK vollständig kompensiert wird. Der Referenzstrom IREF wird dabei über einen Referenzwiderstand 5, an dem die Referenzspannung UREF auftritt, gegen Masse GND geführt.
- Figur 3 zeigt eine nach dem oben beschriebenen Prinzip der elektromagnetischen Kraftkompensation arbeitende Messeinheit 100a und eine fast identisch ausgestaltete Referenzeinheit 100R. Der elektrische und elektronische Teil der Messeinheit 100a und der Referenzeinheit 100R entspricht beispielsweise der Ausgestaltung von Figur 9. Beide Einheiten 100, 100R sind mit einem Parallelogramm versehen, das aus den Elementen 101, 102, 103, 104 bzw. 101R, 102R, 103R, 104R besteht, welches erlaubt, nur die Normalkomponente der Last mMO bzw. mREF an das Koppelelement 1040 bzw. 1040R zu übertragen. Eine Änderung der Position der Last mmo bzw. mREF auf dem betreffenden Ausleger 1041, 1041 R hat daher keinen Einfluss auf die Messung. Diese relativ aufwendige Ausgestaltung der Referenzeinheit 100R wird dann vorgesehen, wenn die Referenzmasse mREF wahlweise austauschbar sein soll.
- In Figur 4 ist die Kraftmessvorrichtung 1000 von Figur 3 mit einer einfacher ausgestalteten Referenzeinheit 100R gezeigt, die anstelle eines Hebelwerks lediglich einen Referenzhebel 105R aufweist, der an einem Ende die als Referenzmasse mREF dienende Referenzspule 1 R trägt und der am anderen Ende von einem Lagerelement 111R gehalten ist. Da die Referenzmasse mREF bei dieser Ausgestaltung nicht austauschbar sein soll, kann diese beliebig gewählt und angeordnet werden. Wie in Figur 4 gezeigt, wird daher die Referenzspule 1R selbst als Referenzmasse mREF verwendet, wodurch eine ausserordentlich einfache Ausgestaltung der Referenzeinheit 100R resultiert. Zu beachten ist bei dieser Ausgestaltung jedoch, das durch das Volumen des Referenzhebels 105R und der Referenzspule 1 R Luft verdrängt wird, so dass Auftriebskräfte resultieren, die vom Luftdruck abhängig sind. Sofern der Luftdruck ändert, ändert somit auf die Kraft FREF, mit der der Referenzhebel 105R nach unten gedrückt wird und gleichzeitig auch der Referenzstrom IREF, mittels dessen ein Magnetfeld erzeugt wird, welches mit dem Magnetfeld des Referenzmagneten 2R derart zusammenwirkt. Die Kraftmessvorrichtung 1000 von Figur 4 liefert daher optimale Ergebnisse bei konstantem Luftdruck.
- Über längere Perioden treten jedoch Druckschwankungen auf, die bei konstanter Höhe typischerweise 40 hPa und somit etwa 4% des Gesamtdruck betragen. In der in Figur 5 gezeigten Ausgestaltung der Referenzeinheit 100R wird der Referenzhebel 105R daher derart mit einem Kompensationskörper 1050R versehen, dass sich die beidseits des Lagerelements 111 R resultierenden Volumenanteile des Referenzhebels 105R und somit die entsprechenden Auftriebskräfte wie folgt kompensieren:

- V1 beinhaltet das gesamte Volumen der Referenzspule 1 R und des Referenzhebels 105R auf der einen Seite des Lagerelements 111R. Die Strecke s1 ist der entsprechende Schwerpunktabstand vom Lagerelement 111R. V2 beinhaltet das Volumen des Referenzhebels 105R auf der andern Seite des Lagerelements 111 R sowie das Volumen des Kompensationskörpers 1050R. Die Strecke s2 ist der entsprechende Schwerpunksabstand. Die Strecke sF ist der Abstand der resultierenden Referenzkraft FREF vom Drehpunkt bzw. vom Lagerelement 111 R. Die Volumina V1 und V2 sind dabei die für die Luftverdrängung relevanten Aussenvolumen des Referenzhebels 105R.
- Ist die Gleichgewichtsbedingung V1 *s1 = V2 *s2 eingehalten, so wird die Einwirkung des Luftdrucks kompensiert, da für die Berechnung der beidseitig auftretenden Auftriebskräfte auf beiden Seiten der Gleichung die Dichte der Luft ρL und die Schwerkraft g eingesetzt wird (ρL * V1 * g * s1 = ρL * V2 * g * s2). Die Auftriebskräfte bleiben daher ohne Einfluss auf die Referenzkraft FREF.
- Hinsichtlich der beidseitig des Lagerelements 111 R auftretenden Gewichtsanteilen des Referenzhebels 100R gelten jedoch unterschiedliche Dichten ρ1 und ρ2. Die Dichte ρ2 des Kompensationskörpers 1050R und des entsprechenden Anteils des Referenzhebels 100R muss dabei möglichst klein sein, damit auf der Seite der Referenzspule 1R im Abstand sF die notwendige Referenzkraft FREF resultiert:

- Ferner sollen Rotationsmomente klein sein. Da die Trägheitsmomente bezüglich Rotation quadratisch vom Abstand abhängen, soll die Strecke s2 daher möglichst kurz sein, wodurch sich jedoch das Volumen V2 des Kompensationskörpers 1050R entsprechend vergrössert.
- Hinsichtlich der Konstruktion der Messeinheit 100 und der Referenzeinheit 100R resultieren daher zahlreiche Forderungen, die besonders vorteilhaft mit Verwendung einer für beide Einheiten 100, 100R gemeinsam genutzten monolithisch ausgebildeten Kraftübertragungsvorrichtung erfüllt werden können, der aus einem Metallkörper vorzugsweise mittels Funkenerosionstechnik gefertigt wird. Eine derartig ausgestaltete monolithisch ausgebildete Kraftübertragungsvorrichtung 150, mittels der die Messeinheit 100 und der Referenzeinheit 100R kompakt aufgebaut werden können, ist in Figur 6 gezeigt. Die monolithisch ausgebildete Kraftübertragungsvorrichtung 150 umfasst die Elemente 101, 102, 103, 104 eines Parallelogramms, wie es bereits in Figur 2 schematisch gezeigt ist. Ein feststehender Parallelogrammschenkel 103 ist mittels zweier Lenker 101 und 102 mit einem auslenkbaren Parallelogrammschenkel 104 verbunden, auf den die zu messende Kraft FMO des Messobjekts einwirken wird und der über ein Koppelelement 29 mit dem innerhalb der monolithisch ausgebildeten Kraftübertragungsvorrichtung 150 vorgesehenen Teil 105-A des Kompensationshebels 105 verbunden ist. Ein Teil 105R-A des Referenzhebels 105R mit dem zugehörigen Lagerelement 111 R ist in den feststehenden Parallelogrammschenkel 103 eingearbeitet.
- Figur 7 zeigt die monolithisch ausgebildete Kraftübertragungsvorrichtung 150 von Figur 6 bestückt mit einer Kompensationsspule 1, einer Referenzspule 1R, Magnetsystemen 2 und 2R, optischen Abtasteinheiten 3, 3R für die Messeinheit 100 und die Referenzeinheit 100R. Die in die monolithisch ausgebildete Kraftübertragungsvorrichtung 150 integrierten ersten Teile 105-A und 105R-A des Kompensationshebels 105 und des Referenzhebels 105R sind beidseits der monolithisch ausgebildeten Kraftübertragungsvorrichtung 150 je mit zweiten Teilen 105-B und 105R-B des Kompensationshebels 105 und des Referenzhebels 105R verschraubt, welche die Kompensationsspule 1 bzw. die Referenzspule 1 R über dem zugehörigen Magnetsystem 2, 2R halten, das von einem mit der monolithisch ausgebildeten Kraftübertragungsvorrichtung 150 verschraubten Stützhebel 20 bzw. 20R gehalten ist. Gezeigt sind ferner die Abtasteinheiten 3, 3R, mittels derer die Auslenkung der Hebel 105, 105R erfasst wird. Weiter gezeigt sind zwei Kompensationskörper 1050R, die beidseits der monolithisch ausgebildeten Kraftübertragungsvorrichtung 150 mit einem Teil des Referenzhebels 105R verbunden sind.
- Möglich sind zahlreiche weitere Ausgestaltungen der monolithisch ausgebildeten Kraftübertragungsvorrichtung 150. Beispielsweise könnten die Magnetsysteme 2, 2R auf einander gegenüberliegenden Seiten vorgesehen sein. Die vorliegende Ausgestaltung hat jedoch den Vorteil, dass einwirkende mechanische Störungen von der Messeinheit 100 und der Referenzeinheit 100R in gleicher Weise erfasst und dadurch kompensiert werden. Selbstverständlich können auch monolithisch ausgebildete Kraftübertragungsvorrichtungen 150 verwendet werden, die Übersetzungen mit mehreren Hebeln aufweisen. (Die dargestellte Wägezelle hat 2 hebel, es können aber auch nur ein Hebel odere mehrere Hebel verwendet werden)
- Besonders einfach können unter Verwendung einer monolithisch ausgebildeten Kraftübertragungsvorrichtung auch eine oder mehrere Referenzeinheiten 103 realisiert werden, die gegebenenfalls mehrere Referenzsignale für eine Kraftmessvorrichtung 1000 oder weitere Messgeräte erzeugen.
- Figur 8 zeigt eine Kraftmessvorrichtung 1000 mit einer Messeinheit 100 und einer Referenzeinheit 100R, die ein Magnetsystem 2-2R gemeinsam nutzen. Auf diese Weise kann die Vorrichtung, beispielsweise die in Figur 6 gezeigte monolithisch ausgebildete Kraftübertragungsvorrichtung 150, noch einfacher und kompakter aufgebaut werden. Das Magnetsystem 2-2R weist auf beiden Seiten je einen ringförmigen Luftspalt auf, in den die Kompensationsspule 1 bzw. die Referenzspule 1 R eintauchen kann. Der Träger 1033 des Magnetsystems 2-2R ist dazu mit einer
- Öffnung 120 versehen, durch die die Referenzspule 1 R hindurch geführt werden kann. Nebst dem reduzierten Aufwand ist bei dieser Ausgestaltung der Erfindung besonders vorteilhaft, dass nur für ein Magnetsystem 2-2R eine Temperaturkompensation erforderlich ist. Ferner wirken sich Änderungen des magnetischen Flusses auf die Messeinheit 100 und die Referenzeinheit 100R gleichartig aus, so dass sich allfällige Änderungen sogar kompensieren.
- Figur 9 zeigt die Referenzeinheit 100R, beispielsweise gemäss Figur 2,
- a) mit einer ersten Messeinheit 100a, welcher der Referenzstrom IREF zugeführt wird,
- b) mit einer zweiten Messeinheit 100b, in der eine Referenzspannung UREF an eine DMS-Messbrücke angelegt wird und
- c) mit einer dritten Messeinheit 100c, in der die Referenzspannung UREF einem AD-Wandler zugeführt wird.
- Die nach dem Push/Pull Prinzip arbeitende erste Messeinheit 100a weist einen Modulator 400 auf, der ein digitales Signal abgibt, das pulsweitenmoduliert oder nach dem Sigma-Delta (□-□) Verfahren moduliert ist. Die beiden genannten Verfahren (PWM und □-□) sind beispielsweise in [8], R. Esslinger, G. Gruhler, R.W. Stewart, Digital Power Amplification based on Pulse-Width Modulation and Sigma-Delta Loops, Signal Processing Division, Dept. of Electronic and Electrical Engineering, University of Strathclyde, Glasgow G1 1XW, Scotland beschrieben.
- Nach dem PWM-Verfahren wird ein von der Regeleinheit 4 abgegebenes analoges Regelsignal sA in Paare von zueinander komplementären Pulsen gewandelt, deren Breiten entsprechend der zu kompensierenden Last geregelt werden und in der Summe gleich "1" sind. Mittels der generierten Pulse werden die Schalter 42a und 42b betätigt. Sofern die Breite des ersten Pulses gleich "1" ist, ist die Waage nicht belastet. Sofern die Breiten beider Pulse gleich sind, liegt Halblast vor und sofern die Breite des zweiten Pulses gleich "1" ist, liegt Volllast vor. Durch Abzählen der Breite eines der Pulse kann daher die Höhe der Last bestimmt werden.
- Nach dem □-□-Verfahren wird ein von der Regeleinheit 4 abgegebenes analoges Regelsignal sA in eine Sequenz von Pulsen vom Wert "0" und "1" wählbarer Anzahl gewandelt, deren Mittelwert dem Wert des analogen Regelsignals sA entspricht. Das Verhältnis der Nullen und Einsen entspricht daher der Höhe der Last FMO.
- In der in Figur 10 gezeigten vorzugsweisen Ausgestaltung der Referenzeinheit 100R werden Signalanteile der Regelgrösse, deren Frequenz oberhalb eines Wertes aus dem Bereich von vorzugsweise 10 Hz - 50 Hz liegt, über ein Hochpassfilter 43 einer Regeleinheit 44 zugeführt, deren Ausgangssignal über einen Widerstand 45 dem nicht-invertierenden Eingang eines als Impedanzwandler beschalteten Operationsverstärkers 46 zugeführt wird. Vom Operationsverstärker 46 wird ein entsprechender Kompensationsstrom IK an eine mit dem Kompensationshebel 105R verbundene zweite Referenzspule 1Rb abgegeben, mittels dessen ein Magnetfeld wird, das mit dem Magnetfeld des Referenzmagneten 2R derart zusammenwirkt, dass höherfrequente Störeinwirkungen korrigiert werden. Störeinwirkungen sind mittels der zweiten Referenzspule 1 Rb daher rasch korrigierbar, ohne dass der Referenzstrom IREF in der ersten Referenzspule 1 Ra beeinträchtigt wird. Der Referenzstrom IREF oder die gegebenenfalls daraus abgeleitete Referenzspannung UREF bleibt daher weitgehend frei von Störungen.
- Um allfällige Drifts oder Abweichungen des Referenzstroms IREF in der ersten Referenzspule 1Ra zu verhindern, wird der durch die zweite Referenzspule 1Rb geführte Kompensationsstrom IK dem invertierenden Eingang eines Integrators 47 zugeführt, dessen Ausgang über einen Widerstand 48 auf den nicht-invertierenden Eingang des Operationsverstärkers 46 zurückgeführt ist, wobei eine Regelschleife gebildet wird, die das Ausgangssignal des Integrators 47 stets in die Ausgangslage zurückführt. Der Integrator ist als Operationsverstärker 47 ausgestaltet, dessen Ausgang über einen Widerstand 471 und einen Kondensator 472 mit dessen invertierenden Eingang verbunden ist.
- Ein in der zweiten Referenzspule 1Rb resultierender Gleichstromanteil wird daher integriert und phasenrichtig an den nicht-invertierenden Eingang des Operationsverstärkers 47 zurückgeführt, wodurch ein dort anliegender konstanter Offset kompensiert wird. Durch diese Massnahme wird sichergestellt, dass in der zweiten Referenzspule R1b nur Ströme fliessen, die von den einwirkenden, hochfrequenten Störungen abhängen und nicht der Kraftkompensation dienen.
- Die erfindungsgemässe Kraftmessvorrichtung 1, die vorzugsweise als Waage verwendet wird, wurde in bevorzugten Ausgestaltungen beschrieben und dargestellt. Erfindungsgemässe Referenzeinheiten sind jedoch in Verbindung mit beliebigen weiteren gravimetrischen oder auch anderen Messgeräten vorteilhaft einsetzbar.
- Die elektro-mechanische Ausgestaltung sowie die Ausgestaltung der Elektronik der Referenzeinheit 100R und der Messeinheit 100 der Kraftmessvorrichtung 1000 wurden zum Teil vereinfacht oder in beispielhaften Ausgestaltungen dargestellt. Die erfindungsgemässe Lösung ist jedoch bei beliebiger Ausgestaltung der Referenzeinheit 100R und der Messeinheit 100, insbesondere beliebig ausgestalteter Hebelwerke, Messvorrichtungen, Magnetsysteme, Spulensysteme und Regeleinrichtungen einsetzbar.
- Literaturverzeichnis
- [1] Bauen Sie Ihre Qualität auf solidem Grund!, Firmenbrochüre, Mettler Toledo GmbH, Januar 2001
- [2] Wägefibel, Mettler Toledo GmbH, April 2001
- [3]
US 5,665,941 - [4]
US 2004/0088342 A1 - [5] U. Tietze, Ch. Schenk, Halbleiterschaltungstechnik, 11. Auflage, 1. Nachdruck, Springer Verlag, Berlin 1999
- [6] Albert O'Grady, Transducer/Sensor Excitation and Measurement Techniques, Analog Dialogue 34-5 (2000)
- [7]
DE 33 24 402 - [8] R. Esslinger, G. Gruhler, R.W. Stewart, Digital Power Amplification based on Pulse-Width Modulation and Sigma-Delta Loops, Signal Processing Division, Dept. of Electronic and Electrical Engineering, University of Strathclyde, Glasgow G1 1XW, Scotland
Claims (18)
- Kraftmessvorrichtung (1000) mit einer Messeinheit (100) und mit einer Referenzeinheit (100R), die der Abgabe einer Referenzgrösse, eines Referenzstromes (IREF) oder einer Referenzspannung (UREF), dient, mittels der die zu bestimmende Kraft (FMO) eines Messobjekts von der Messeinheit (100) erfassbar und/oder digitalisierbar ist, dadurch gekennzeichnet, dass die Referenzeinheit (100R) eine mit einer Referenzmasse (mREF) belastete Kraftmessvorrichtung ist, die nach dem Prinzip der elektromagnetischen Kraftkompensation einen Referenzstrom (IREF) erzeugt, der mittels einer Mess-und Regelvorrichtung (3R, 4R) derart regelbar ist, dass er in einer von einem Referenzhebel (105R) gehaltenen ersten Referenzspule (1R; 1Ra) ein Magnetfeld erzeugt, welches mit dem Magnetfeld eines Referenzmagneten (2R; 2-2R) derart zusammenwirkt, dass eine Kraft auf den Referenzhebel (105R) einwirkt, mittels der die ebenfalls auf den Referenzhebel (105R) einwirkende Kraft (FREF) der Referenzmasse (mREF) kompensierbar ist.
- Kraftmessvorrichtung (1000) nach Anspruch 1, dadurch gekennzeichnet, dass der Referenzstrom (IREF) durch einen Referenzwiderstand (5) geführt wird, um daran eine Referenzspannung (UREF) zu erzeugen und/oder dass der Referenzstrom (IREF) oder die Referenzspannung (UREF) gewandelt und als digitale Referenzgrösse verwendet wird.
- Kraftmessvorrichtung (1000) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Ist-Position des Referenzhebels (105R), mittels einer optischen Abtasteinheit (3R) messbar ist, die der Abgabe einer entsprechenden Regelgrösse dient, anhand der der Referenzstrom (IREF) durch die Regelvorrichtung (4R) derart einstellbar ist, dass der Referenzhebel (105R) stets gegen eine Soll-Position geführt wird.
- Kraftmessvorrichtung (1000) nach Anspruch 1, 2 oder 3, dadurch gekennzeichnet, dass Signalanteile der Regelgrösse, deren Frequenz oberhalb eines Wertes aus dem Bereich von 10 Hz - 50 Hz liegt, über ein Hochpassfilter (43) einer Regeleinheit (44) zuführbar sind, mittels der ein Verstärker (46) steuerbar ist, der einen entsprechenden Kompensationsstrom (lK) an eine mit dem Referenzhebel (105R) verbundene zweite Referenzspule (R1b) abgibt, welcher ein Magnetfeld erzeugt, das mit dem Magnetfeld des Referenzmagneten (2R) derart zusammenwirkt, dass höherfrequente Störeinwirkungen korrigierbar sind.
- Kraftmessvorrichtung (1000) nach Anspruch 4, dadurch gekennzeichnet, dass der Kompensationsstrom (IK) über die zweite Referenzspule (R1b) einem Eingang eines Integrators (47) zuführbar ist, dessen Ausgang auf den Eingang des Verstärkers (46) zurückgeführt ist, wobei eine Regelschleife gebildet wird, die das Ausgangssignal des Integrators (47) stets in die Ausgangslage zurückführt.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-5, dadurch gekennzeichnet, dass
die von der Referenzeinheit (100R) erzeugte Referenzspannung (UREF) in der nach dem DMS-Prinzip arbeitenden Messeinheit (100) an eine Messbrücke angelegt wird, oder dass
der von der Referenzeinheit (100R) erzeugte Referenzstrom (IREF) in der nach dem Prinzip der elektromagnetischen Kraftkompensation arbeitenden Messeinheit (100) derart alternierend durch eine von einem zugehörigen Kompensationshebel (105) gehaltene zugehörige erste und zweite Kompensationsspule (1a, 1b) geschaltet wird, dass ein Magnetfeld resultiert, welches mit dem Magnetfeld eines zugehörigen Magnetsystems (2) derart zusammenwirkt, dass eine Kraft über den zugehörigen Kompensationshebel (105) auf ein zugehöriges Hebelwerk (101, 102, 103, 104) einwirkt, mittels der die ebenfalls auf das Hebelwerk (101, 102, 103, 104) einwirkende Kraft (FMO) des Messobjekts (mMO) von der Messeinheit (100) kompensierbar ist, oder dass
der erforderliche Kompensationsstrom aus der Referenzspannung (UREF) oder dem Referenzstrom (IREF) abgeleitet ist, oder dass
in der Messeinheit (100) ein AD-Wandler vorgesehen ist, welcher die Referenzspannung (UREF) oder der Referenzstrom (IREF) als Referenzgrösse zuführbar ist, mittels der die gemessenen Signale (sMO) des Messobjekts (mMO) digitalisierbar sind. - Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-6, dadurch gekennzeichnet, dass der Referenzhebel (105R) mittels eines Lagerelements (111 R) mit dem feststehenden Teil (103) des Hebelwerks der Messeinheit (100) verbunden ist und/oder dass der Referenzhebel (105R) und das Hebelwerk (101, 102, 103, 104, 104) der Messeinheit (100) zumindest teilweise in einer monolithisch ausgebildeten Kraftübertragungsvorrichtung (150) integriert sind und/oder dass nur die Referenzeinheit (100R) mittels einer monolithisch ausgebildeten Kraftübertragungsvorrichtung realisiert ist.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-7, dadurch gekennzeichnet, dass für die Messeinheit (100) und die Referenzeinheit (100R) ein gemeinsam genutztes Magnetsystem (2-2R) vorgesehen ist, dessen Magnetfeld auf einer Seite mit dem in der Kompensationsspule (1) und auf der anderen Seite mit dem Magnetfeld der Referenzspule (1 R) zusammenwirkt.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-8, dadurch gekennzeichnet, dass die Referenzspule (1R) und gegebenenfalls Teile des Referenzhebels (105R) die Referenzmasse (mREF) bilden.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-8, dadurch gekennzeichnet, dass das Volumen (V1) der Referenzspule (1R) und des Anteils des Referenzhebels (105R) auf einer Seite des Lagerelements (111) durch das Volumen (V2) wenigstens eines Kompensationskörpers (1050R) und des Anteils des Referenzhebels (105R) auf der anderen Seite des Lagerelements (111) unter Berücksichtigung des Schwerpunktabstände (s1, s2) kompensiert ist, so dass die beidseits auftretenden Auftriebskräfte auch bei Änderungen des Luftdrucks zumindest annähernd ausbalanciert sind.
- Kraftmessvorrichtung (1000) nach Anspruch 10, dadurch gekennzeichnet, dass wenigstens ein Kompensationskörper (1050R) austauschbar und/oder der Abstand vom Kompensationskörper (1050R) zum Lagerelement (111) einstellbar ist.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-11, dadurch gekennzeichnet, dass die Referenzeinheit (100R) in einem gasdicht verschlossenen Gehäuse angeordnet ist.
- Kraftmessvorrichtung (1000) nach Anspruch 10, dadurch gekennzeichnet, dass das gasdicht verschlossene Gehäuse evakuiert ist.
- Kraftmessvorrichtung (1000) nach einem der Ansprüche 1-13, dadurch gekennzeichnet, dass die Temperatur der Magnetsysteme (2, 2R) und/oder der Spulen (1; 1a, 1b; 1R; 1Ra, 1Rb) der Messeinheit (100) und/oder der Referenzeinheit (100R) messbar und zur Korrektur der Messwerte verwendbar ist.
- Referenzeinheit (100R), geeignet zur Erzeugung eines zu einer Referenzmasse (mREF) korrespondierenden Referenzstroms (IREF) dadurch gekennzeichnet, dass eine Mess- und Regelvorrichtung (3R, 4R) vorgesehen ist, mittels der der Referenzstroms (IREF) derart regelbar ist, dass er in einer von einem Referenzhebel (105R) gehaltenen ersten Referenzspule (1R; 1Ra) ein Magnetfeld erzeugt, welches mit dem Magnetfeld eines Magnetsystems (2R; 2-2R) derart zusammenwirkt, dass eine Kraft auf den Referenzhebel (105R) einwirkt, mittels der die ebenfalls auf den Referenzhebel (105R) einwirkende Kraft (FREF) der Referenzmasse (mREF) kompensierbar ist.
- Referenzeinheit (100R) nach Anspruch 15, dadurch gekennzeichnet, dass die Referenzeinheit (100R) mindestens einen Speicher für spezifische Daten der Referenzeinheit und/oder einen Identifikationscode aufweist.
- Referenzeinheit (100R) nach einem der Ansprüche 15-16, dadurch gekennzeichnet, dass die Referenzeinheit (100R) eine elektrische und mechanische Schnittstelle aufweist.
- Referenzeinheit (100R) nach nach einem der Ansprüche 15-17, dadurch gekennzeichnet, dass die Referenzeinheit (100R) als Mikroelektromechanisches System aufgebaut ist.
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06120100.0A EP1898193B1 (de) | 2006-09-05 | 2006-09-05 | Kraftmessvorrichtung und Referenzeinheit |
| PL06120100.0T PL1898193T3 (pl) | 2006-09-05 | 2006-09-05 | Urządzenie do pomiaru siły i jednostka odniesienia |
| JP2007213244A JP2008064750A (ja) | 2006-09-05 | 2007-08-20 | 力測定装置及び基準器 |
| US11/846,151 US7690273B2 (en) | 2006-09-05 | 2007-08-28 | Force-measuring device and reference unit |
| CN200710148272.6A CN101140182B (zh) | 2006-09-05 | 2007-09-04 | 测力装置和基准单元 |
| JP2013241661A JP2014066719A (ja) | 2006-09-05 | 2013-11-22 | 力測定装置及び基準器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP06120100.0A EP1898193B1 (de) | 2006-09-05 | 2006-09-05 | Kraftmessvorrichtung und Referenzeinheit |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1898193A1 true EP1898193A1 (de) | 2008-03-12 |
| EP1898193B1 EP1898193B1 (de) | 2016-06-01 |
Family
ID=37487372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP06120100.0A Active EP1898193B1 (de) | 2006-09-05 | 2006-09-05 | Kraftmessvorrichtung und Referenzeinheit |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7690273B2 (de) |
| EP (1) | EP1898193B1 (de) |
| JP (2) | JP2008064750A (de) |
| CN (1) | CN101140182B (de) |
| PL (1) | PL1898193T3 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2278286A1 (de) | 2009-07-23 | 2011-01-26 | Mettler-Toledo AG | Verfahren zur Ermittlung von Prozessgrössen für eine Kraftmessvorrichtung und Kraftmessvorrichtung |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2058635A4 (de) * | 2006-08-29 | 2011-08-31 | Shimadzu Corp | Elektronisches gleichgewicht |
| JP2010038855A (ja) * | 2008-08-08 | 2010-02-18 | Universal Weight Enterprise Co Ltd | 重力校正機能を備える質量測定装置 |
| DE102009035410B4 (de) | 2009-07-31 | 2017-03-16 | Horiba Europe Gmbh | Prüfstand mit einer Vorrichtung zum Kalibrieren einer Kraft-Messeinrichtung |
| CN101819059A (zh) * | 2010-04-27 | 2010-09-01 | 中国计量科学研究院 | 一种实现质量量子基准的方法 |
| CN102829900B (zh) * | 2011-07-27 | 2014-04-30 | 合肥工业大学 | 差动式水平微力测量装置的测量方法 |
| PL2607866T3 (pl) * | 2011-12-22 | 2015-05-29 | Mettler Toledo Gmbh | Ogniwo obciążnikowe według zasady elektromagnetycznej kompensacji siły z optoelektronicznym czujnikiem pozycji |
| EP2634543A1 (de) | 2012-02-29 | 2013-09-04 | Mettler-Toledo AG | Wägezelle nach dem Prinzip der magnetischen Kraftkompensation mit optoelektronischem Positionssensor |
| EP2690415B2 (de) † | 2012-07-23 | 2022-05-18 | Mettler-Toledo GmbH | Kraftmessvorrichtung mit Verschiebegewicht |
| PL2784454T3 (pl) * | 2013-03-28 | 2017-06-30 | Mettler-Toledo Gmbh | Diagnostyka ogniwa obciążnikowego |
| CN103697976B (zh) * | 2013-12-26 | 2015-08-12 | 合肥京东方光电科技有限公司 | 微量天平测重系统 |
| CN104949742B (zh) * | 2015-07-08 | 2017-10-20 | 杰克陈 | 称重传感器 |
| EP3208582B1 (de) * | 2016-02-17 | 2021-01-20 | Mettler-Toledo GmbH | Differenzmessschaltung und waage mit kraftkompensation |
| DE102016009098B4 (de) * | 2016-07-27 | 2018-06-14 | Fresenius Medical Care Deutschland Gmbh | Vorrichtung und Verfahren zur Prüfung eines Wägesystems eines Blutbehandlungsgerätes |
| CN106248192B (zh) * | 2016-08-29 | 2018-10-09 | 中国计量科学研究院 | 一种光学折射法与位移测定法相互验证的大质量测量装置 |
| CN106500898B (zh) * | 2017-01-13 | 2022-04-29 | 岳阳市永金起重永磁铁有限公司 | 一种顶开式检测磁力起重设备拉脱力的方法及装置 |
| DE102017110930B4 (de) * | 2017-05-19 | 2019-01-17 | Sartorius Lab Instruments Gmbh & Co. Kg | Magnettopf für eine Tauchspulenanordnung einer elektronischen Waage |
| KR101869345B1 (ko) * | 2017-06-12 | 2018-06-21 | 아주대학교산학협력단 | 중량 측정장치 |
| CN107607137B (zh) * | 2017-10-29 | 2024-12-06 | 沈阳创原计量仪器有限公司 | 一种浮力配平系统及其制造方法和应用 |
| US11187571B2 (en) * | 2018-12-10 | 2021-11-30 | Government Of The United States Of America, As Represented By The Secretary Of Commerce | Absolute mass balance |
| DE102018133563B4 (de) | 2018-12-21 | 2020-10-22 | Wipotec Gmbh | Waage mit Überlastdiagnose |
| EP3708978B1 (de) * | 2019-03-11 | 2023-05-03 | Mettler-Toledo GmbH | Kompaktes direktmesssystem |
| CN110207859A (zh) * | 2019-05-15 | 2019-09-06 | 江苏大学 | 一种基于光杠杆的电磁平衡式力传感器及电子天平 |
| CN113853339B (zh) * | 2019-05-22 | 2023-02-28 | I.M.A.工业机械自动装置股份公司 | 用于供应冲泡产品的配给装置 |
| DE102019212091A1 (de) * | 2019-08-13 | 2021-02-18 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mikrosystem und verfahren zum herstellen desselben |
| JP7224260B2 (ja) * | 2019-08-26 | 2023-02-17 | 三菱重工業株式会社 | 荷重検出装置 |
| US12276559B2 (en) * | 2022-03-25 | 2025-04-15 | Government Of The United States Of America, As Represented By The Secretary Of Commerce | Electronic torque realization apparatus |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4212361A (en) * | 1978-02-24 | 1980-07-15 | Mettler Instruments Ag | Electrical scale with improved immunity to environmental disturbances |
| GB2104667A (en) * | 1981-08-17 | 1983-03-09 | Pneumatic Scale Corp | Weighing system |
| DE3324402A1 (de) * | 1982-08-20 | 1984-02-23 | Mettler Instrumente AG, 8606 Greifensee | Waage mit elektromagnetischer kraftkompensation |
| GB2257793A (en) * | 1991-07-01 | 1993-01-20 | Pitney Bowes Inc | Weighing scale with validating reference channel |
| US6271484B1 (en) * | 1997-10-08 | 2001-08-07 | Ishida Co., Ltd. | Weighing apparatus having an automatic filter adjusting capability |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2832535A (en) * | 1951-10-25 | 1958-04-29 | Hobart Mfg Co | Computing scale |
| JPS5223575B2 (de) * | 1971-08-03 | 1977-06-25 | ||
| CH529999A (de) * | 1971-09-22 | 1972-10-31 | Mettler Instrumente Ag | Waage |
| JPS5163654A (ja) * | 1974-11-29 | 1976-06-02 | Shimadzu Corp | Denjitenbin |
| DE2601165C3 (de) * | 1976-01-14 | 1979-06-28 | Sartorius Gmbh, 3400 Goettingen | Eichfähige, elektromagnetisch kompensierende Waage |
| DE2722093C2 (de) * | 1977-05-16 | 1979-02-15 | Hartmut Dipl.-Phys. Dr. 6203 Hochheim Gruetzediek | Gewichts- und Kraftmeßeinrichtung |
| JPS5425860U (de) * | 1977-07-22 | 1979-02-20 | ||
| JPH0131939Y2 (de) * | 1979-05-16 | 1989-10-02 | ||
| EP0044707B1 (de) * | 1980-07-17 | 1987-10-14 | Kabushiki Kaisha Shimadzu Seisakusho | Elektronische Waage |
| DE3230998C2 (de) * | 1982-08-20 | 1986-10-02 | Mettler-Waagen Gmbh, 6300 Giessen | Wägezelle |
| EP0122796B1 (de) * | 1983-04-14 | 1989-08-02 | Kabushiki Kaisha Ishida Koki Seisakusho | Waage |
| AU565314B2 (en) * | 1983-12-28 | 1987-09-10 | K.S. Ishida K.K. | Weight sensor |
| DE3829637C1 (de) * | 1988-09-01 | 1990-04-12 | Sartorius Gmbh, 3400 Goettingen, De | |
| JPH02213730A (ja) * | 1989-02-15 | 1990-08-24 | Inter Tex:Kk | 内圧防爆形電子秤 |
| TW287229B (de) * | 1994-10-05 | 1996-10-01 | Shimatsu Seisakusho Kk | |
| JPH09184750A (ja) * | 1995-12-28 | 1997-07-15 | Ishida Co Ltd | 計量装置 |
| JP2002296101A (ja) * | 2001-03-30 | 2002-10-09 | Anritsu Corp | 電子天秤 |
| JP4113758B2 (ja) | 2002-10-29 | 2008-07-09 | 株式会社イシダ | 重量測定装置、ノイズ除去方法およびディジタルフィルタの設計方法 |
| US7315003B2 (en) * | 2004-09-13 | 2008-01-01 | Scientech Incorporated | High resolution offset electronic weighing devices and methods |
| EP1674842B1 (de) * | 2004-12-23 | 2008-01-23 | Mettler-Toledo AG | Kalibriergewichtsanordnung für eine elektronische Waage |
| JP2006184192A (ja) * | 2004-12-28 | 2006-07-13 | Shimadzu Corp | 電子天びん |
-
2006
- 2006-09-05 EP EP06120100.0A patent/EP1898193B1/de active Active
- 2006-09-05 PL PL06120100.0T patent/PL1898193T3/pl unknown
-
2007
- 2007-08-20 JP JP2007213244A patent/JP2008064750A/ja active Pending
- 2007-08-28 US US11/846,151 patent/US7690273B2/en active Active
- 2007-09-04 CN CN200710148272.6A patent/CN101140182B/zh active Active
-
2013
- 2013-11-22 JP JP2013241661A patent/JP2014066719A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4212361A (en) * | 1978-02-24 | 1980-07-15 | Mettler Instruments Ag | Electrical scale with improved immunity to environmental disturbances |
| GB2104667A (en) * | 1981-08-17 | 1983-03-09 | Pneumatic Scale Corp | Weighing system |
| DE3324402A1 (de) * | 1982-08-20 | 1984-02-23 | Mettler Instrumente AG, 8606 Greifensee | Waage mit elektromagnetischer kraftkompensation |
| GB2257793A (en) * | 1991-07-01 | 1993-01-20 | Pitney Bowes Inc | Weighing scale with validating reference channel |
| US6271484B1 (en) * | 1997-10-08 | 2001-08-07 | Ishida Co., Ltd. | Weighing apparatus having an automatic filter adjusting capability |
Non-Patent Citations (1)
| Title |
|---|
| KESSLING G ET AL.: "A weighing device for use on a ship", MEASUREMENT SCIENCE AND TECHNOLOGY,IOP, vol. 4, no. 10, 1993, Bristol, GB, pages 1035 - 1042, XP000399915 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2278286A1 (de) | 2009-07-23 | 2011-01-26 | Mettler-Toledo AG | Verfahren zur Ermittlung von Prozessgrössen für eine Kraftmessvorrichtung und Kraftmessvorrichtung |
| WO2011009942A1 (de) | 2009-07-23 | 2011-01-27 | Mettler-Toledo Ag | Verfahren zur ermittlung von prozessgrössen für eine kraftmessvorrichtung und kraftmessvorrichtung |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1898193B1 (de) | 2016-06-01 |
| US7690273B2 (en) | 2010-04-06 |
| JP2008064750A (ja) | 2008-03-21 |
| US20080053249A1 (en) | 2008-03-06 |
| JP2014066719A (ja) | 2014-04-17 |
| CN101140182A (zh) | 2008-03-12 |
| PL1898193T3 (pl) | 2016-11-30 |
| CN101140182B (zh) | 2013-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1898193B1 (de) | Kraftmessvorrichtung und Referenzeinheit | |
| DE4221539B4 (de) | Waage mit einem Validierungs-Referenzkanal | |
| DE2201106C2 (de) | Elektromagnetisch kompensierende Waage | |
| DE2722093C2 (de) | Gewichts- und Kraftmeßeinrichtung | |
| DE2850032C2 (de) | ||
| CH621409A5 (de) | ||
| DE3230998A1 (de) | Waegezelle | |
| DE3336250A1 (de) | Kraftmessvorrichtung | |
| DE112015006384T5 (de) | Elektronische Waage | |
| CH700570A2 (de) | Seismometer mit Kraftrückkopplung. | |
| DE4001614A1 (de) | Kompensationswaage | |
| CH671101A5 (de) | ||
| DE112004001082T5 (de) | Kapazitive Beschleunigungssensoranordnung | |
| DE69403373T2 (de) | Kraftmessinstrument | |
| DE3045980C2 (de) | Steigungs- und Gefälle-Meßgerät für Boden-Fahrzeuge | |
| DE2723244C3 (de) | Elektronische Schaltung zum Messen der Kapazitätsdifferenz zwischen zwei Kondensatoren | |
| EP0237583A1 (de) | Verfahren und Schaltungsanordnung zum Umsetzen einer Messspannung in einen digitalen Wert | |
| DE102009006546B4 (de) | Schaltungsanordnung und Verfahren zum Bereitstellen eines aufbereiteten Messsignals | |
| DE10153603A1 (de) | Differenzmessschaltung sowie Regeleinrichtung und Waage | |
| DE19960418C2 (de) | Elektronische Waage mit Justiergewicht | |
| EP0456168A2 (de) | Vorrichtung zur Analog-Ditial-Wandlung einer Messgrösse, die von in Brückenschaltung angeordneten Sensoren erzeugt wird, insbesondere von Dehnungsmessstreifen in einer Wägezelle | |
| DE3218943A1 (de) | Elektrische federwaage | |
| DE19547836C1 (de) | Waage mit bipolarer elektromagnetischer Kraftkompensation | |
| DE3023719C2 (de) | Anordnung zum Messen von Druck oder Druckdifferenz in Flüssigkeiten oder Gasen für stationären oder mobilen Einsatz | |
| DE102017127690B4 (de) | Verfahren zur Generierung eines Ergebniswertes in einer elektromagnetisch kompensierenden Wägevorrichtung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20080902 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| 17Q | First examination report despatched |
Effective date: 20081024 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20151029 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: METTLER-TOLEDO GMBH |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| INTG | Intention to grant announced |
Effective date: 20160330 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 804167 Country of ref document: AT Kind code of ref document: T Effective date: 20160615 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502006014970 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20160601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160902 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161001 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160930 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161003 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502006014970 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| 26N | No opposition filed |
Effective date: 20170302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20170531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160905 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160905 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 804167 Country of ref document: AT Kind code of ref document: T Effective date: 20160905 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20160930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20060905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160601 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20190827 Year of fee payment: 14 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20200905 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200905 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240926 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20240808 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20241001 Year of fee payment: 19 |