EP1660401B1 - Dispositif de manutention de fut - Google Patents
Dispositif de manutention de fut Download PDFInfo
- Publication number
- EP1660401B1 EP1660401B1 EP04816189A EP04816189A EP1660401B1 EP 1660401 B1 EP1660401 B1 EP 1660401B1 EP 04816189 A EP04816189 A EP 04816189A EP 04816189 A EP04816189 A EP 04816189A EP 1660401 B1 EP1660401 B1 EP 1660401B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- barrel
- arm
- lifting device
- grasping
- finger
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000002093 peripheral effect Effects 0.000 claims description 8
- 239000003758 nuclear fuel Substances 0.000 abstract 1
- 230000003287 optical effect Effects 0.000 abstract 1
- 239000007787 solid Substances 0.000 abstract 1
- 238000000605 extraction Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000013307 optical fiber Substances 0.000 description 2
- 241000252254 Catostomidae Species 0.000 description 1
- 206010048232 Yawning Diseases 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 239000002920 hazardous waste Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0212—Circular shape
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/02—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by suction means
- B66C1/0293—Single lifting units; Only one suction cup
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/62—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means comprising article-engaging members of a shape complementary to that of the articles to be handled
- B66C1/625—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means comprising article-engaging members of a shape complementary to that of the articles to be handled for gripping drums or barrels
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21F—PROTECTION AGAINST X-RADIATION, GAMMA RADIATION, CORPUSCULAR RADIATION OR PARTICLE BOMBARDMENT; TREATING RADIOACTIVELY CONTAMINATED MATERIAL; DECONTAMINATION ARRANGEMENTS THEREFOR
- G21F5/00—Transportable or portable shielded containers
- G21F5/06—Details of, or accessories to, the containers
- G21F5/14—Devices for handling containers or shipping-casks, e.g. transporting devices loading and unloading, filling of containers
Definitions
- the subject of this invention is a device for grasping and lifting a drum according to the preamble of claim 1, normally of cylindrical or slightly different shape, for grasping, raising and possibly inspecting it.
- the invention relates to a barrel handling device which offers on the contrary an assured grip of the barrel, without the risk of releasing it or letting it swing in any way by lifting it.
- the dispostif is easily equipped with means that allow a complete examination of the surface of the drum.
- the document EP 0 633 215 discloses a handling device according to the preamble of claim 1 which also offers the advantage of a safe grip of the barrel by means of tilting fingers coming under the lower periphery of the barrel, which is therefore placed on them when it is lifted, but the installation of the device around the shaft is much more problematic than with the invention.
- the handling device comprises a gripping system of the barrel by the upper face, at least one movable arm vertically relative to the gripping system and next to the peripheral face of the barrel, and a finger disposed under the arm and mobile below the underside of the barrel.
- the barrel can be first grasped by the upper face, slightly raised by the gripping system, the arm or the arms (there are usually several) have descended next to the barrel; the finger is deployed below the drum and exerts a sure support; the arm opposes the lateral sliding of the barrel; and the gripping system is relieved while still being able to offer a contribution to the stable seizure of the drum.
- the device according to the invention comprises a centering mechanism comprising fingers deviating radially, for example towards a flange of the upper face of the barrel.
- the gripping system is stuck to the drum only after the fingers have all touched the collar and have centered it; a favorable consequence is that each arm can be placed at a small distance from the barrel to better secure it and to guarantee that the finger goes well below the shaft while moving.
- the barrel examination means may comprise means located under the arm, as well as means located in the gripping system. These means make it possible to examine the upper face of the drum and to decide temporarily whether it can be lifted, and these allow to examine the peripheral face and the lower face of the barrel when the arm is lowered.
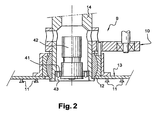
- the figure 1 represents the device usually the figure 2 represents a part of the gripping means, the figure 3 represents the grapple as a whole, the figure 4 represents the finger deployment system, the figure 5 the layout of this system and the figure 6 represents the centering system of the grapple on the shaft.
- the figure 1 is discussed.
- the drums are stored in wells 1 a little wider than them.
- Normally closed drawers 2 insulate wells 1 from the outside but are open when a drum is to be stored or extracted.
- the device of the invention which is then used, comprises in particular a mobile mechanical system in the well 1 and adapted to go down or up the barrel, called grapple 3, and a hood 4 transfer and protection which absorbs radiation from the drum and rests on the opening of the well 1 during the storage or extraction operation.
- the hood 4 contains a cavity large enough to accommodate the grapple 3 loaded barrel.
- Other elements of the handling device, usual, have not been recalled here.
- the invention relates exclusively to grapple 3.
- the drums 5 are generally cylindrical in shape and comprise an upper face 6, a lower face 7, a peripheral lateral face 8; it can also raise a rim 49 upper projecting upwardly around the upper face 6 and which corresponds to the sect of the lid in the side shell.
- the flange 49 may exist in another form when the lid is screwed or welded, and have the same ability to center the grapple.
- the grapple 3 is composed of several sets, the first described is a gripping system 9 of the barrel 5 whose purpose is to raise slightly before completing the handling. It comprises a support 10, at least one suction cup 11 (here a group of three suckers 11 in a circle), and a ball 12 connecting a suction cup holder 13 to the support 10.
- the suction cups 11 can be applied to the upper face 6 of the drum 5 even if it is found to be inclined, without the support 10 must be tilted erratically.
- the rest of the description is undertaken by means of the figure 3 .
- the ball 12 and the support 10 are suspended from a column 14, itself suspended from a cable 15 manipulated from the outside by means of a force sensor 16.
- the column 14 also carries an upper plate 17.
- a hooking system 18 of the drum 5 which comprises at least one vertical arm 19 (here, a group of three arms 19 in a circle, but only one of which is illustrated) suspended on a movable plate 20
- the mobile plate 20 slides on the column 14 by means of a ball screw 21 whose upper and lower ends are retained in the upper plate 17 and the support 10.
- a geared motor 22 mounted on the upper plate 17 rotates the ball screw 21 by means of a belt transmission 23.
- a graduated ruler 24 is also mounted between the upper plate 17 and the support 10 parallel to the ball screw 21, and a position sensor 25 mounted on the moving plate 20 makes it possible to follow the movements of the latter in the vertical direction.
- the arms 19 embrace the barrel 5, the radius of their circle being a little larger than that of the 8. Their height is also a little larger than that of the peripheral face 8.
- a finger 26 that they carry below them comes below the lower face 7 of the barrel when the grapple 3 has been completely lowered.
- the fingers 26 extend between a folded position where they extend tangentially, in the circle of the arms 19, and an active position where they extend radially, under the barrel 5. They are mounted under the arms 19 by hinges 27 which enable them to be rotated, and their rotational movement is controlled by means of a rod 28 which extends vertically up to the top of the arm 19, where it ends in a lever 29 which a jack 30 makes The latter two elements are mounted on a support called tile 32, itself mounted on a guide carriage 33, sliding on a slide of appropriate section 34 mounted on the movable plate 20. The tile 32 and the guide carriage 33 are moved by a cylinder 35.
- the same device is present for each of the three arms 19, in order to be able to vary at will the radius of the circle that they embrace.
- the grapple 3 can thus be lowered into narrow wells or adapt to drums 5 of various diameters.
- FIG. 3 Another element of grapple 3 is a centering device 36 appearing at the figure 6 mounted on the cupholder 13 and which comprises a jack 37, a ring 38 rotating on the cupholder 13 and a trio of fingers 39 articulated by an inner end to the ring 38 and, in the middle, to the cupping-holder 13: the articulation with these
- the place is mobile and comprises a pivot 40 attached to the suction cup holder 13 and slidable in a slot 41 established in the length of the finger 39.
- the rotation of the ring 38 operated by the cylinder 37 changes the orientation of the fingers 39 and the radial position of their outer end.
- the deployment of the fingers 39 continues until all touch the rim 49 of the barrel 5 and a centering of the gripping system 9 and especially of the attachment system 18 to the barrel 5 is obtained.
- the drum 5 is entered when it is in the well 1 (the process would be identical in other places).
- the grapple 3 is lowered into the well 1 until the gripping system 9 arrives on the upper face 6.
- the centering system 36 is turned on, then the suction cups 11 are actuated.
- the grapple 3 is slightly raised to lift the barrel 5.
- the hooking system 18 is then started, the arms 19 are spread and then down along the peripheral face 8, and finally the fingers 26 are deployed and the arms 19 tightened.
- the drum 5 is then firmly gripped and can be reassembled without fear of a failure of the suction cups 11. It should be noted that the fingers 26 retain the lower face 7 of the drum 5 if it opened and yawns.
- Lighting is provided by a light generator 40 mounted on the upper plate 17 and adapted illuminating the surface of the drum 5 by a network of optical fibers 44.
- the images of the upper face 6 of the drum 5 are taken by a camera 42 (see also FIG. figure 2 ) mounted in the bottom of the column 14 and directed downwards, forming an annular light source 43 which provides the necessary illumination of the upper face 6 being established around it.
- the optical fibers 44 extend in each of the arms 19 to the underside thereof, and are also connected to endoscopes or fiberscope 45 mounted on the tiles 32. The illumination and examination of the peripheral face 8 and then of the lower face 7 become possible as the arm descends along the latter and below it.
- suction cups 11 could, for example, be replaced by other electromagnetic or mechanical gripping means.
- the lighting system can use micro-lamps or LEDs.
- the vision system integrated in the arm 19 can be integrated directly into the camera of a video-endoscope.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- High Energy & Nuclear Physics (AREA)
- Load-Engaging Elements For Cranes (AREA)
Abstract
Description
- Le sujet de cette invention est un dispositif de saisie et de levage d'un fût selon le préambule de la revendication 1, normalement de forme cylindrique ou peu différente, pour le saisir, l'élever et éventuellement l'inspecter.
- Certains déchets dangereux sont versés dans des fûts métalliques pour être entreposés pour de longues durées. C'est notamment le cas pour les produits irradiés de l'industrie nucléaire. Des techniques particulières ont été mises au point pour enrober et vitrifier les déchets avant de les verser dans les fûts, qui séjournent ensuite dans une installation d'entreposage. Ils peuvent cependant être déplacés plus tard, pour une inspection ou un nouveau transport.
- De nombreux appareils ont été conçus pour manipuler les fûts. Ils comprennent des moyens de préhension variés tels des pinces ou des mâchoires de serrage conçus pour saisir une portion ou une autre du fût mais qui présentent, en général, les inconvénients de ne pas offrir une prise bien assurée, d'occuper un volume trop grand pour les descendre commodément dans des puits d'entreposage, de ne pas s'opposer à des oscillations ou des basculements du fût une fois qu'il a été soulevé et enfin de ne pas comporter de possibilité d'examen du fût avant la saisie et ou dès qu'elle est faite. Or si un fût est déchiré ou fissuré, il convient de ne pas le déplacer afin de ne pas aggraver des fuites du contenu dangereux ; et même si le fût est intact, les dispositifs connus comportent des risques de mauvaises manipulations ou de chutes qui font apparaître la possibilité d'une rupture.
- L'invention a trait à un dispositif de manutention de fût qui offre au contraire une prise assurée du fût, sans risque de le relâcher ou de le laisser basculer d'aucune façon en le levant. De plus, le dispostif est facilement équipé de moyens qui permettent un examen complet de la surface du fût.
- Le document
EP 0 633. 215 décrit un dispositif de manutention selon le préambule de la revendication 1 qui offre aussi l'avantage d'une prise sûre du fût au moyen de doigts basculant venant sous la périphérie inférieure du fût, qui est donc posé sur eux quand il est levé, mais la mise en place du dispositif autour du fût est beaucoup plus problématique qu'avec l'invention. - Sous sa forme la plus générale, le dispositif de manutention comprend un système de préhension du fût par la face supérieure, au moins un bras mobile verticalement par rapport au système de préhension et à côté de la face périphérique du fût, et un doigt disposé sous le bras et mobile au-dessous de la face inférieure du fût. Ainsi, le fût peut être d'abord saisi par la face supérieure, légèrement soulevé par le système de préhension, le bras ou les bras (il y en a généralement plusieurs) sont descendus à côté du fût ; le doigt est déployé au-dessous du fût et exerce un appui sûr ; le bras s'oppose au glissement latéral du fût ; et le système de préhension est soulagé tout en pouvant continuer d'offrir une contribution à la saisie stable du fût.
- Afin de garantir un bon résultat de la saisie, le dispositif selon l'invention comprend un mécanisme de centrage comprenant des doigts s'écartant radialement, par exemple vers une collerette de la face supérieure du fût. Le système de préhension n'est collé au fût qu'après que les doigts ont tous touché la collerette et l'ont centrée ; une conséquence favorable est que chaque bras peut être placé à une faible distance du fût pour mieux l'assujettir et garantir que le doigt aille bien au-dessous du fût en se déplaçant.
- Une mise en place correcte du dispositif est possible même si le fût est peu accessible, à grande profondeur ou dans un puits étroit.
- Les moyens d'examen du fût peuvent comprendre des moyens situés sous le bras, ainsi que des moyens situés au système de préhension. Ces moyens-ci permettent d'examiner la face supérieure du fût et de décider provisoirement s'il peut être levé, et ceux-là permettent d'examiner la face périphérique puis la face inférieure du fût quand le bras est descendu.
- L'invention sera maintenant décrite en liaison aux figures. La
figure 1 représente le dispositif généralement, lafigure 2 représente une partie des moyens de préhension, lafigure 3 représente le grappin dans son ensemble, lafigure 4 représente le système de déploiement des doigts, lafigure 5 l'agencement de ce système et lafigure 6 représente le système de centrage du grappin sur le fût. Lafigure 1 est abordée. - Dans le mode de réalisation qu'on décrit ici, les fûts sont entreposés dans des puits 1 un peu plus larges qù'eux.
- Des tiroirs 2 normalement fermés isolent les puits 1 de l'extérieur mais sont ouverts quand un fût doit être entreposé ou extrait. Le dispositif de l'invention, qui est alors employé, comprend en particulier un système mécanique mobile dans le puits 1 et apte à descendre ou remonter le fût, qu'on appelle grappin 3, ainsi qu'une hotte 4 de transfert et de protection qui absorbe les radiations provenant du fût et qui repose sur l'ouverture du puits 1 pendant l'opération d'entreposage ou d'extraction. La hotte 4 contient une cavité assez vaste pour y loger le grappin 3 chargé du fût. D'autres éléments du dispositif de manutention, usuels, n'ont pas été rappelés ici. L'invention porte exclusivement sur le grappin 3.
- Les fûts 5 sont de forme généralement cylindrique et comprennent une face supérieure 6, une face inférieure 7, une face latérale périphérique 8 ; on peut aussi y relever un rebord 49 supérieur saillant vers le haut autour de la face supérieure 6 et qui correspond à la serte du couvercle dans la virole latérale. Le rebord 49 peut exister sous une autre forme lorsque le couvercle est vissé ou soudé, et présenter la même aptitude au centrage du grappin.
- On passe à la
figure 2 . Le grappin 3 est composé de plusieurs ensembles, dont le premier décrit est un système de préhension 9 du fût 5 dont le but est de l'élever légèrement avant de compléter la manutention. Il comprend un support 10, au moins une ventouse 11 (ici un groupe de trois ventouses 11 en cercle), et une rotule 12 reliant un porte-ventouses 13 au support 10. Par ce moyen, les ventouses 11 peuvent être appliquées sur la face supérieure 6 du fût 5 même si elle se trouve être inclinée, sans que le support 10 doive être basculé de façon erratique. La suite de la description est entreprise au moyen de lafigure 3 . - La rotule 12 et le support 10 sont suspendus à une colonne 14, elle-même suspendue à un câble 15 manipulé de l'extérieur par l'intermédiaire d'un capteur d'effort 16. La colonne 14 porte aussi un plateau supérieur 17.
- Un autre élément du grappin 3 est un système d'accrochage 18 du fût 5 et qui comprend au moins un bras 19 vertical (ici, un groupe de trois bras 19 en cercle, mais dont un seul est illustré) suspendu à un plateau mobile 20. Le plateau mobile 20 coulisse sur la colonne 14 au moyen d'une vis à billes 21 dont les extrémités supérieure et inférieure sont retenues dans le plateau supérieur 17 et le support 10. Un moto-réducteur 22 monté sur le plateau supérieur 17 fait tourner la vis à billes 21 au moyen d'une transmission à courroie 23. Une règle graduée 24 est aussi montée entre le plateau supérieur 17 et le support 10 parallèlement à la vis à billes 21, et un capteur de position 25 monté sur le plateau mobile 20 permet de suivre les mouvements de celui-ci en direction verticale. La description porte maintenant sur les
figures 3 ,4 et 5 . - Les bras 19 embrassent le fût 5, le rayon de leur cercle étant un peu plus grand que celui de la face périphérique 8. Leur hauteur est aussi un peu plus grande que celle de la face périphérique 8.
- Un doigt 26 qu'ils portent sous eux vient au-dessous de la face inférieure 7 du fût quand le grappin 3 a été complètement descendu. Les doigts 26 se déploient entre une position repliée où ils s'étendent tangentiellement, dans le cercle des bras 19, et une position active où ils s'étendent radialement, sous le fût 5. Ils sont montés sous les bras 19 par des charnières 27 qui permettent de les tourner, et leur mouvement de rotation est commandé par l'intermédiaire d'une tige 28 qui s'étend verticalement jusqu'au-dessus du bras 19, où elle se termine en un levier 29 qu'un vérin 30 fait tourner par une bielle de commande 31. Ces deux derniers éléments sont montés sur un support appelé tuile 32, lui-même monté sur un chariot de guidage 33, coulissant sur une glissière de section appropriée 34 montée sur le plateau mobile 20. La tuile 32 et le chariot de guidage 33 sont déplacés par un vérin 35. Le même dispositif est présent pour chacun des trois bras 19, afin de pouvoir faire varier à volonté le rayon du cercle qu'ils l'embrassent. Le grappin 3 pourra ainsi être descendu dans des puits étroits ou s'adapter à des fûts 5 de diamètres variés.
- Un autre élément du grappin 3 est un dispositif de centrage 36 apparaissant à la
figure 6 , monté sur le porte-ventouses 13 et qui comprend un vérin 37, une couronne 38 tournant sur le porte-ventouses 13 et un trio de doigts 39 articulés par une extrémité intérieure à la couronne 38 et, par le milieu, au porte-ventouses 13 : l'articulation à ces endroits est cependant mobile et comprend un pivot 40 fixé au porte-ventouses 13 et pouvant coulisser dans une fente 41 établie dans la longueur du doigt 39. - La rotation de la couronne 38 opérée par le vérin 37 modifie l'orientation des doigts 39 et la position radiale de leur extrémité extérieure. Le déploiement des doigts 39 continue jusqu'à ce que tous touchent le rebord 49 du fût 5 et qu'un centrage du système de préhension 9 et surtout du système d'accrochage 18 au fût 5 soit obtenu.
- Voici comment le fût 5 est saisi quand il se trouve dans le puits 1 (le procédé serait identique dans d'autres lieux). Le grappin 3 est descendu dans le puits 1 jusqu'à ce que le système de préhension 9 arrive sur la face supérieure 6. Le système de centrage 36 est mis en marche, puis les ventouses 11 sont actionnées. Le grappin 3 est légèrement remonté pour soulever le fût 5. Le système d'accrochage 18 est alors mis en route, les bras 19 sont écartés puis descendus le long de la face périphérique 8, et enfin les doigts 26 sont déployés et les bras 19 resserrés. Le fût 5 est alors fermement saisi et peut être remonté sans crainte d'une défaillance des ventouses 11. Il est à remarquer que les doigts 26 retiennent la face inférieure 7 du fût 5 si elle s'est ouverte et bâille.
- Un aspect important et déjà mentionné de l'appareil est la possibilité d'effectuer des inspections pour décider si l'extraction du fût 5 peut se faire sans risque ou sans dommage. On revient à la
figure 3 . De l'éclairage est apporté par un générateur de lumière 40 monté sur le plateau supérieur 17 et apte à illuminer la surface du fût 5 par un réseau de fibres optiques 44. Les images de la face supérieure 6 du fût 5 sont prises par une caméra 42 (cf. aussi à lafigure 2 ) montée dans le fond de la colonne 14 et dirigée vers le bas, formant une source lumineuse annulaire 43 qui fournit l'éclairage nécessaire de la face supérieure 6 étant établie autour d'elle. Les fibres optiques 44 s'étendent dans chacun des bras 19 jusqu'en dessous de ceux-ci, et sont aussi reliées à des endoscopes ou fibroscope 45 montés sur les tuiles 32. L'éclairage et l'examen de la face périphérique 8 puis de la face inférieure 7 deviennent possibles à mesure que le bras descend le long de celle-là puis au-dessous de celle-ci. - Bien d'autres modes de réalisation de l'appareil sont possible. Les ventouses 11 pourraient par exemple être remplacées par d'autres moyens de saisie électromagnétiques ou mécaniques. Le système d'éclairage peut utiliser des micro-lampes ou des LED. Le système de vision intégré dans le bras 19 peut être intégré directement la caméra d'un vidéo-endoscope.
Claims (7)
- Dispositif de saisie et de levage d'un fût (5) de forme sensiblement cylindrique et comprenant une face inférieure (7), une face supérieure (6) et une face périphérique (8), comprenant un système de préhension du fût par la face supérieure, au moins un bras mobile (19) verticalement par rapport au système de préhension (9) et à côté de la face périphérique, et au moins un doigt (26) disposé sous le bras et mobile au-dessous de la face inférieure, caractérisé en ce que le système de préhension comprend un mécanisme de centrage (36) comportant des doigts (39) s'écartant radialement.
- Dispositif de saisie et de levage d'un fût selon la revendication 1, caractérisé en ce que le système de préhension (9) est suspendu à une colonne (14), le bras (19) est suspendu à un plateau (20) coulissant sur la colonne (14), et un système élévateur (21, 22, 27) règle la hauteur du plateau sur la colonne.
- Dispositif de saisie et de levage de fût selon la revendication 2, caractérisé en ce que le plateau porte un chariot (32) glissant radialement, auquel le bras est suspendu, et un moyen de commande de glissement du chariot.
- Dispositif de saisie et de levage de fût selon la revendication 3, caractérisé en ce que le chariot porte un moyen de mise en rotation (29, 30, 31) du doigt (26), et en ce que le doigt est monté tournant sur le bras et relié au moyen de mise en rotation par une tige (28) située sur le bras.
- Dispositif de saisie et de levage de fût selon l'une quelconque des revendications 1 ou 2, caractérisé en ce que le système de préhension (9) comprend un support (10), au moins une ventouse (11), et une rotule (12) de montage de la ventouse sur le support.
- Dispositif de saisie et de levage de fût selon l'une quelconque des revendications 1 à 5, caractérisé en ce qu'il comprend des moyens d'examen du fût.
- Dispositif de saisie et de levage de fût selon la revendication 6, caractérisé en ce que les moyens d'examen du fût comprennent des moyens (44) situés sur le bras (19), et des moyens (41, 42) situés au système de préhension (9).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0350489A FR2859197B1 (fr) | 2003-09-02 | 2003-09-02 | Dispositif de manutention de fut |
| PCT/FR2004/050407 WO2005028355A1 (fr) | 2003-09-02 | 2004-09-01 | Dispositif de manutention de fut |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1660401A1 EP1660401A1 (fr) | 2006-05-31 |
| EP1660401B1 true EP1660401B1 (fr) | 2008-05-28 |
Family
ID=34130845
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP04816189A Expired - Lifetime EP1660401B1 (fr) | 2003-09-02 | 2004-09-01 | Dispositif de manutention de fut |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7264288B2 (fr) |
| EP (1) | EP1660401B1 (fr) |
| JP (1) | JP4871723B2 (fr) |
| DE (1) | DE602004014162D1 (fr) |
| FR (1) | FR2859197B1 (fr) |
| WO (1) | WO2005028355A1 (fr) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2106382B1 (fr) | 2007-01-12 | 2018-12-26 | Raumaster Paper Oy | Appareil de préhension pour soulever des rouleaux de bande de matière, en particulier des rouleaux de papier et de carton |
| CN102412001B (zh) * | 2011-10-18 | 2013-08-07 | 清华大学 | 一种核电站乏燃料贮存竖井屏蔽井盖抓具 |
| CA2772752C (fr) * | 2012-03-28 | 2021-01-26 | Michel Gaudet | Methode et systeme d'extraction de dechets desintegres |
| JP6117505B2 (ja) * | 2012-10-02 | 2017-04-19 | 川崎重工業株式会社 | 吸引保持装置 |
| FR3000915B1 (fr) * | 2013-01-17 | 2015-03-13 | Amg Ind | Dispositif de prehension et procede associe |
| KR101810909B1 (ko) | 2016-07-29 | 2017-12-26 | (주)러셀 | 캐니스터용 다접점 그리핑장치 |
| CN111591754B (zh) * | 2020-05-23 | 2021-06-18 | 黄林 | 一种轴类零件输送机器人 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE240449C (fr) * | ||||
| US2783078A (en) * | 1952-03-07 | 1957-02-26 | Vacuum Concrete Inc | Handling apparatus |
| US3383286A (en) * | 1966-09-27 | 1968-05-14 | Atomic Energy Commission Usa | Core element handling system |
| US3835617A (en) * | 1971-09-20 | 1974-09-17 | Stock Equipment Co | Method and apparatus for filling and closing containers |
| US3785691A (en) * | 1972-08-07 | 1974-01-15 | American Chain & Cable Co | Automatic lifting device |
| JPS5836090A (ja) * | 1981-08-27 | 1983-03-02 | Kokusai Denshin Denwa Co Ltd <Kdd> | テレビジョン信号の中央値予測符号化方式 |
| JPS5836090U (ja) * | 1981-08-28 | 1983-03-09 | 日産自動車株式会社 | バキユ−ムカツプ装置 |
| JPS5943792A (ja) * | 1982-09-07 | 1984-03-10 | 株式会社明電舎 | 遠隔操作式吊具 |
| JPS603791A (ja) * | 1983-06-21 | 1985-01-10 | Sairatsuku:Kk | ピツキング方式 |
| JPS603791U (ja) * | 1983-06-21 | 1985-01-11 | 株式会社明電舎 | 遠隔操作式吊具 |
| JPS62142845U (fr) * | 1986-02-28 | 1987-09-09 | ||
| DE3636016A1 (de) * | 1986-10-23 | 1988-05-11 | Kernforschungsanlage Juelich | Greifer zum transport von behaeltern |
| GB8701347D0 (en) * | 1987-01-22 | 1987-02-25 | Bishop Barn Ltd | Package handling apparatus |
| JPS6484994A (en) * | 1987-09-26 | 1989-03-30 | Tamura Electric Works Ltd | Signal processor |
| US5127692A (en) * | 1987-10-20 | 1992-07-07 | Canon Kabushiki Kaisha | Article gripping apparatus |
| JPH0184994U (fr) * | 1987-11-25 | 1989-06-06 | ||
| EP0524271B1 (fr) * | 1991-02-08 | 1995-08-16 | Heppenstall Holding AG | Dispositif de levage de charge |
| FR2707276B1 (fr) * | 1993-07-06 | 1997-06-06 | Commissariat Energie Atomique | Système anti-chute mécanique pour un dispositif de préhension d'objets lourds. |
| DE69426888T2 (de) * | 1993-11-04 | 2001-08-02 | Comalco Aluminium Ltd., Melbourne | Vakuumhebevorrichtung |
| JPH107373A (ja) * | 1996-06-25 | 1998-01-13 | Ishikawajima Harima Heavy Ind Co Ltd | 大型容器の吊り装置 |
-
2003
- 2003-09-02 FR FR0350489A patent/FR2859197B1/fr not_active Expired - Fee Related
-
2004
- 2004-09-01 WO PCT/FR2004/050407 patent/WO2005028355A1/fr active IP Right Grant
- 2004-09-01 EP EP04816189A patent/EP1660401B1/fr not_active Expired - Lifetime
- 2004-09-01 US US10/534,539 patent/US7264288B2/en not_active Expired - Fee Related
- 2004-09-01 DE DE602004014162T patent/DE602004014162D1/de not_active Expired - Lifetime
- 2004-09-01 JP JP2006524405A patent/JP4871723B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP4871723B2 (ja) | 2012-02-08 |
| DE602004014162D1 (de) | 2008-07-10 |
| WO2005028355A1 (fr) | 2005-03-31 |
| JP2007504067A (ja) | 2007-03-01 |
| FR2859197B1 (fr) | 2006-10-13 |
| US7264288B2 (en) | 2007-09-04 |
| EP1660401A1 (fr) | 2006-05-31 |
| FR2859197A1 (fr) | 2005-03-04 |
| US20060119117A1 (en) | 2006-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0392926B1 (fr) | Engin de télémanipulation prévu pour être suspendu à une unité de levage | |
| EP1660401B1 (fr) | Dispositif de manutention de fut | |
| EP0451061B1 (fr) | Dispositif motorisé de préhension de charge à commande à distance | |
| FR2495586A1 (fr) | Tete extensible pour la prehension et la modification d'un groupe d'objets | |
| EP0230593B1 (fr) | Installation automatisée pour briqueter la paroi intérieure d'une enceinte | |
| LU86114A1 (fr) | Installation pour briqueter la paroi interieure d'une enceinte | |
| FR2507520A1 (fr) | Pince pour dispositif de levage destine a la manutention de pieces | |
| EP1218550B1 (fr) | Dispositif de repartition de matieres en vrac avec goulotte rotative a angle d'inclinaison variable | |
| EP3401925B1 (fr) | Chariot de manipulation d'un conteneur en vue de sa connexion à un isolateur | |
| EP0198267B1 (fr) | Installation pour la pose d'un garnissage réfractaire sur la paroi intérieure d'une enceinte | |
| FR2773348A1 (fr) | Chariot pour la prise en suspension et le levage de charges de forme allongee telles que des bouteilles de gaz, transformable en diable elevateur | |
| EP0402231A1 (fr) | Dispositif de préhension autoserrant à distance de fûts cylindriques | |
| EP0248251A1 (fr) | Installation automatisée pour briqueter la paroi intérieure d'une enceinte | |
| FR2593795A1 (fr) | Dispositif assurant la prise et le basculement d'un recipient, en particulier d'un fut | |
| FR2625023A2 (fr) | Dispositif de jonction entre un conteneur de transport et une paroi horizontale d'une enceinte de dechargement | |
| EP0639775B1 (fr) | Dispositif de stockage d'objects cylindriques, à chargement et déchargement rapides | |
| EP2803593A1 (fr) | Procédé et installation pour manchonner un objet | |
| FR2685309A1 (fr) | Dispositif de manutention de bouteilles. | |
| EP0802144A1 (fr) | Dispositif pour saisir et manipuler des charges | |
| FR2584154A1 (fr) | Crochet a prise et depose automatique fonctionnant par gravite | |
| FR2484385A1 (fr) | Appareil de levage d'une charge | |
| FR2612059A3 (fr) | Table a plateau central tournant et sureleve | |
| EP0359600A1 (fr) | Perfectionnement aux hayons élévateurs repliables | |
| FR2557551A1 (fr) | Pince automatique pour la manutention et le levage de charges | |
| EP4223404A1 (fr) | Dispositif d'insertion d'un tronçon de garnissage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20050506 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): BE DE GB |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: COMMISSARIAT A L'ENERGIE ATOMIQUE |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RBV | Designated contracting states (corrected) |
Designated state(s): BE DE GB |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE DE GB |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REF | Corresponds to: |
Ref document number: 602004014162 Country of ref document: DE Date of ref document: 20080710 Kind code of ref document: P |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20090303 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20150921 Year of fee payment: 12 Ref country code: DE Payment date: 20150914 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20150930 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160930 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602004014162 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20160901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160901 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170401 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20160930 |