EP1383675B1 - Navire a voilure distribuee - Google Patents
Navire a voilure distribuee Download PDFInfo
- Publication number
- EP1383675B1 EP1383675B1 EP02738210A EP02738210A EP1383675B1 EP 1383675 B1 EP1383675 B1 EP 1383675B1 EP 02738210 A EP02738210 A EP 02738210A EP 02738210 A EP02738210 A EP 02738210A EP 1383675 B1 EP1383675 B1 EP 1383675B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- float
- mast
- floats
- ship
- sail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B1/00—Hydrodynamic or hydrostatic features of hulls or of hydrofoils
- B63B1/02—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement
- B63B1/10—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls
- B63B1/14—Hydrodynamic or hydrostatic features of hulls or of hydrofoils deriving lift mainly from water displacement with multiple hulls the hulls being interconnected resiliently or having means for actively varying hull shape or configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H9/00—Marine propulsion provided directly by wind power
- B63H9/04—Marine propulsion provided directly by wind power using sails or like wind-catching surfaces
- B63H9/06—Types of sail; Constructional features of sails; Arrangements thereof on vessels
Definitions
- the present invention relates to a multihull vessel using as a driving force natural elements such as the force of wind or waves according to the preamble of claim 1, as known from US-A-606104.
- the force of the wind tends to make the boat run.
- stability is achieved by widening the "lift polygon".
- the wing is carried by a limited number of masts, rigidly connected to the hulls, themselves rigidly fixed to each other (with the exception of a possible possibility of rotation of the mast on its axis).
- the present invention provides generally to replace the rigid structure of the sailboat by a highly deformable structure, consisting of a passenger compartment and a "hitch" of "floats" connected by inter-float links, constituted articulated rigid cables or rods, and a set of masts. Some of these masts can wear a sail, hence the term "distributed wing".
- This architecture thus separates several functions conventionally united in the rigid structure of a boat:
- the invention can be considered as a "sailboard train", connected by joints.
- Said joints may consist of rigid rods (capable of working in compression or traction) or cables (able to work only in traction). These joints are fixed on two separate floats, which they associate. When a cable is used, any fixation is sufficient. When a rigid rod is used, the joint will include a mechanical part (cardan type) allowing said rod to take relative to each float any orientation.
- the invention combines the advantages of windsurfing and the ability to tow a cockpit compatible with long voyages possibly crewed.
- the present invention provides a sailing vessel, comprising a plurality of floats, some of which have sails connected to masts, characterized in that the floats are movable relative to each other, in that the position and the relative orientation of said floats are adjusted by means of a set of inter-float links, and in that the rig which makes it possible to define and maintain the position of each mast connects said mast to at least one other float than that which carries said mast.
- the floats are arranged in line.
- the floats and the inter-float links are arranged so as to form a set of closed geometric figures, such as for example triangles.
- the inter-float links consist of rigid rods attached to each float by means of a hinge, such as for example a gimbal.
- the inter-float links consist of cables.
- the components of the rigging which connect a mast to a float different from that which carries said mast are made of cables.
- the components of the rigging which connect a mast to a float different from that which carries said mast comprise rigid rods.
- At least one float carries two sails, carried by two masts, arranged in such a way that the effect of the wind on one of these sails tends to drive the float under water and that the effect of the wind on the other sail tends to cause the float to take off.
- the floats tow by means of tractive links a cockpit having wings that allow it to rise above the sea from a speed relative to the wind sufficient.
- the floats tow by means of tractive links a cabin capable of sinking below sea level, for example under the effect of the action of a foil.
- the energy corresponding to the rotational movements of the rigid rods is transmitted to a motor device, such as a propeller.
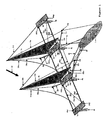
- FIGS. 1 to 3 a shell 1 is towed by cables 2 to a set of four floats 3 equipped with fins 4, the two central ones of which are equipped with sails 5.
- the parts relating to a given float will be identified by a letter (a, b, c, d).
- Floats 3a, 3b, 3c and 3d appear from left to right Figure 1.
- the Vessel: Distributed Wing moves to the upper left corner of the figure.
- the hull 1 is towed by towing cables 2 (2b and 2c) attached to the rear of the floats 3b and 3c.
- the crew will be able to live in the hull 1, which therefore serves as "cockpit", and it is from there that it will make the necessary maneuvers.
- All floats are equipped with fins 4 (4a, 4b, 4c, 4d).
- the floats 3b and 3c carry sails 5 (5b and 5c). These sails are of the type used in sailboards.
- Each sail comprises a mast 6 (6b and 6c), fixed to the float by a mast base 7 (7b and 7c) which allows the mast to rotate freely relative to the float.
- the mast legs are of the type used in windsurf boards.
- the control of the anteroposterior balance will be ensured, as on several classic sailboats, by two cables fixed at the masthead and hooked respectively to the front (forestay) and back (backstay) of the float.
- these cables must not interfere with the movements of the sail, which requires that the point of attachment on the float is the most forward (or backward) possible.
- the floats 3b and 3c carry at the front a rigid forestay base 8 (8b and 8c), which allows to advance the point of attachment on the forestay float, without having to lengthen the 'prop.
- a pulley 9 (9b and 9c) which allows a forestay 10 (10b and 10c) to connect the top of the mast 6 (6b and 6c) to the hull 1.
- the floats 3b and 3c carry at the back a base of backstay 11 (11b and 11c), on which is fixed a pulley 12 (12b and 12c) which allows a backstay 13 (13b and 13c) to connect the top of the mast 6 to the hull 1.
- the possibility of adjustment of the forestay 10 and backstay 13 will adapt to different speeds (relative position of the wind relative to the route followed by the float), and if necessary to use the hull 1 to contribute to balance of the mast 6.
- the masts 6 are subjected to a force that tends to tilt them forward.
- the traction exerted by the backstay 13 on the mast 6 will compensate for this force.
- Upwind, the mast tends to tilt back, which will be offset by the forestay.
- the control of the balance of the masts 6 also depends on the angle between the wind and the sails 5.
- the sails 5 comprise a boom 14 (rigid bar at the base of the sail).
- Lists 15 (15b and 15c) connect the rear ends of the booms 14 to the shell 1, via pulleys 16 (16b and 16c) attached to the rear of the floats 3b and 3c.
- a connecting cable 17 connects the rear ends of the booms 14. In this way, the crew can from the hull 1 adjust the angle between the sails 5 and the wind.
- the solution used for the anteroposterior balance can not be applied to the control of lateral balance.
- the mast is held laterally by means of stay cables.
- the capsizing effect is compensated by the keel and its weight, or by the width of the multihull.
- such stays could not be fixed on the float that carries the mast.
- the width of the floats 3 is too limited to allow effective action of a possible stay.
- the principle of the stay cable can however be used, provided that it is attached to another float that the one carrying the mast. It is then necessary that a device is implemented to compensate the force of approach of the floats that would exercise a stay.
- This device is an inter-float link, which can be implemented in the following manner.
- the floats 3 are connected by rigid connecting rods 18 (18a1, 18a2, 18b1, 18b2, 18c1, 18c2).
- Two floats neighbors are connected by two such rods, located respectively at the front and the back of each float. Note that the use of two rods makes it possible to impose two neighboring 3 floats and the two rods that connect them to form a deformable parallelogram.
- the sea is not flat, it is necessary that the floats can go up and down relatively to one another.
- the adjustment of the vessel according to the various gaits may require to vary the relative position of the floats in a horizontal plane. It is therefore necessary to allow the rigid rods 18 to be articulated with respect to the floats.
- each rod is attached to the floats by joints 19 of the cardan type, which allow them to rotate freely along two axes.
- the float 3b plays a role of "steering float”. It is indeed connected to the shell 1 by a steering cable 20 which is fixed to the front of the float 3b. We will see in the section “definition of the direction of the ship” how this steering cable is used.
- the masts 6 of the floats 3b and 3c are connected to the floats which surround them (the 3a and the 3c in the case of the float 3b, the 3b and the 3d in the case of the float 3c) by anti-capsizing cables 21 (21a, 21b, 21c, 21d), one end of which is fixed on the top of the mast 6.
- anti-capsizing cables 21 play the role of the stays of a conventional sailboat.
- the rear of the float 3a (respectively of the float 3d) is connected to the float 3b (respectively to the float 3c) by a cable 22a (respectively 22d) of fixed length.
- the masts 6 can rotate about two horizontal axes, one perpendicular to the direction of the floats (anteroposterior balance), and the other parallel to this direction (lateral balance).
- the crew can adjust the tension exerted on the stay 10 and the backstay 13 of each sail carried by the floats 3b and 3c. This makes it possible to transmit to the floats 3b and 3c the forces necessary for the anteroposterior balance of the sail. These forces will be compensated by the buoyant force generated by the interaction between the water and the float. Note that pulling from the shell 1 on a cable such as the backstay 13 may tend to bring said shell 1 of the floats_ 3 ... However, the shell 1 is pulled by the cables 2. It can therefore be exercised by means of cables such as backstay 13 forces whose resultant remains lower than the tensile force of the cables 2. To possibly be able to exert higher forces, we can replace one of the cables 2 by a rigid rod. This principle can be applied to each cable to adjust the components of the Distributed Wing Vessel, and will not be described again later.
- the force F1 is decomposed into a horizontal drift component, which will be compensated by the drift 7c, and a vertical component Fv1 directed upwards.
- the force F2 is broken down into a horizontal component, which prevents the mast 6b from capsizing, and a component Fv2 directed downwards.
- Fv1 and Fv2 have the same intensity. If we take stock of the vertical forces, we see that the resultant forces acting on the float, with the exception of the flotation force, is directed downwards. The flotation force will therefore ensure the vertical balance of this float.
- the direction of the ship is determined by the relative tension exerted on the towing cable 2b, as well as on the steering cable 20. Under the effect of traction exerted by the wind on the sails and transmitted to the floats, these cables are under tension.
- the crew varies the tension exerted on the steering cable 20, which varies the moment it exerts on the float, and thus allows to orient the latter in the chosen direction. Then, the crew adjusts the length of the towing cables 2b and 2c, which determines the relative position of the float 3b and the float 3c (the latter remains parallel to the float 3b, due to the action of the rigid connecting rods 18 which connect them, but it can move forward or backward with respect to float 3b).
- the floats 3a and 3d remain stationary relative respectively to the float 3b and the float 3c, due to the combined action of the rigid connecting rods 18 and cables 22a and 22d.
- the angle between the booms 14 and the wind is set by the plays 15.
- the ship sails on starboard tack it is listening 15c which is tense (reciprocally, it is listening 15b which is stretched under port tack ).
- the connecting cable 17 makes it possible to adjust only the boom 14 to the wind (in FIG. 1, this is therefore the boom 14c): the position of the boom 14 in the wind (14b in FIG. indeed determined by the length (fixed) of the connecting cable 17, since the boom 14 to the wind has been set by the corresponding listening 15.
- FIG. 3 shows a view from above of the ship when the wind is 90 ° from the heading followed by the floats (crosswind). If the floats had retained the relative position that they occupied in FIG. 1, the sail 5c "would disembark" the sail 5b. The crew will choose according to the pace a relative position of the floats that allows to keep the two sails inflated.
- the steering float may be provided with a rudder on which the crew acts by means of cables.
- Each extreme float must exert a vertical force directed downwards to prevent the capsizing of the neighboring mast.
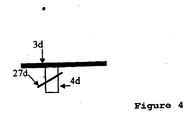
- This force can be generated by a suitable "foil” 27 (surface immersed beneath the float, oriented so that the effect of the water on that surface generates a vertical force directed downwards).
- Figure 4 schematically represents a view lateral of a 3d float equipped with such a "foil” 27d (the float 3d advances to the left of the figure, the water exerts on the foil 27d a force directed downwards).
- Those skilled in the art may propose solutions that make it possible to control all the struts 10 by a single cable.
- the set of backstops 13 can be controlled by means of a single cable.
- all the sails are oriented in the same way, and all the masts can be oriented in the same way.
- a single cable can be used to obtain this setting.
- the adjustment of the forestay and the backstay is more or less crucial.
- the float selected has a sufficient length, it will be possible to impose a fixed length on the forestay and backstay, thus avoiding having to adjust these cables from the passenger compartment.
- the anteroposterior balance of the float may vary (tendency to sink the rear of the float or the front of the float, depending on the direction of the wind relative to the float axis).
- an alternative to the variation of the orientation of the mast is a movement of the mast foot forward or rearward.
- the float 3b carries two sails (5b and 5'b), and the float 3c also carries two sails (5c and 5'c). None of the masts 6 is vertical.
- the masts 6b and 6c are inclined downwind, the masts 6'b and 6'c are inclined to the wind.
- the sail 5c exerts on the float 3c a force whose vertical component is directed downwards, while the sail 5'c exerts on the float 3c a force whose vertical component is directed upwards.
- the vertices of the two masts of the same float are connected by a cable 39.
- the booms 14b and 14c point towards the rear of the float, while the booms 14'b and 14'c point towards its front (this allows avoid that the sail 5'b (respectively the sail 5'c) does not open the sail 5b (respectively 5c).
- the two sails play a symmetrical role, and the cables 21 keep a constant tension.
- the sails change their role, the one that tended to sink the float having after the tilt tendency to take off, and vice versa. No specific maneuver is therefore necessary at the mast, or at the head of the sail.
- the resultant vertical forces exerted by the wind on each float is approximately zero.
- the anti-capsize effect can therefore only be based on the weight of the float, or on a force exerted by a "foil" (similar to that described in paragraph 2.2).
- the position of the supports 24 on the masts 6 is determined according to the characteristics of the sails 5 so that the center of thrust of the sail (point on which is exerted the resultant forces exerted by the wind on the sail) is also as close as possible to the supports 24.
- the length of the connecting cables 18'a and the angle of inclination of the mast 6b are chosen so that the force exerted by the wind on the sail 5b cut the connecting cable 18'a inside the segment delimited by the floats 3a and 3b. The same reasoning applies to the sail 5c. Under these conditions, the force exerted by the wind can not capsize the ship.
- the floats are connected in pairs to form triangles.
- Figure 7 shows a possible arrangement of such triangles.
- Four “downwind” floats (3a, 3b, 3c, 3d) are connected to three “windward” floats (3e, 3f, 3g) by 18 "connecting cables.
- All floats carry a mast 6, except the "last" float downwind (float 3d) .
- the floats 3b, 3c and 3d also carry a rigid support rod 21 "(21" b, 21 “c and 21” d). supported by the mast 6a and the rigid support rod 21 "b (and likewise the masts wind 6f and 6g are supported by a mast and a rigid rod).
- the maneuvers are controlled from the hull 1.
- all the ends of the cables that make it possible to control these maneuvers are attached to the hull 1 (halyards 26, hale-down mast 31, hale-bas of boom 32, plays 15).
- other embodiments may be proposed, allowing to handle from the hull 1 8 control cables (divided into two groups, a port group of cables and a starboard cable group, and to control respectively the halyards, - the-hale-lowers, the boom-downs, the plays).
- These control cables will for example be fixed to the front of the port head float (respectively starboard) and will pass on each port float (respectively starboard). It may be useful to group them in sheaths attached to the connecting rods 18.
- the tack is done as follows for a group of 3 floats. Let's suppose that we sail under starboard tack (the fifth sail is carried by the 3rd float). The 26th halyard is edged (pulled) on the port float 3a which will receive the sail. Similarly, the mast downhole 31e which weighs on the port mast is shocked (released). As a result, the port mast 6a rises to the starboard mast 27e. When the two mastheads meet, the halyard point 28e of the sail comes into contact with the port mast head 27a. The 26th halyard is then blocked on the port float 3a, and shocked on the starboard float 3e.
- anti-capsizing cables 21 and rigid anti-capsizing rods 21 ' may possibly make it possible to limit the number of floats.
- the "downwind" float has its mast maintained by an anti-capsizing cable 21 which pulls on the "wind” float, and the mast of the latter is held by a rigid anti-capsizing rod 21 ' who presses the float "downwind”.
- cables and anti-capsize rods as well as cables and cross-float link rods are possible.
- the chosen choice will optimize the mechanical characteristics of these components, taking into account their interaction with the sea. Cables will thus preferably be chosen as components intended to be in contact with or close to water.
- the motive power of the waves is put to good use.
- Figure 9 shows the principle implemented.
- the float 3b is connected to the float 3a by the rod 18a.
- Said rod 18a is fixed to the float 3b by a hinge 35b1, and the float 3a by a hinge 35a2.
- the float 3b is connected to the float 3c by a rod 18b, which is fixed to the float 3b by a hinge 35b2, and the float 3c by a hinge 35c1.
- Said joints 35 are cardan type, and allow rotational movements with respect to a horizontal axis parallel to the axis of the float.
- Said movements of rotation of the rod 18a are transmitted by a reduction gearing system 36b1 to a propeller 37b carried by the float 3b.
- a "free wheel” type device 38b1 is positioned between the articulation 35b1 and the propeller 37b. Said freewheel 38b1 can drive the propeller 37b (in the direction that allows it to propel the float 3b) during anti-clockwise rotation of the rod 18a. On the contrary, this same freewheel 38b1 makes it possible to separate the propeller 37b from the rod 18a during the hourly rotational movements of the latter.
- joints 35 may be integral with "inverter” devices, making it possible to transmit a propellant movement to the helix irrespective of the direction of rotation of the rod 18.
- wave force has been described above as an adjunct to a wing, it should be noted that one can only make a ship driven by the force of the waves, or in addition to another mode of propulsions (oars, paddles, ). In this case also, we can have a ship with two floats only.
- the cabin is integrated with the engine device (it is carried by one of the floats 3).
- the hull that carries it is towed by the motor device.
- An interesting feature of this cabin is its ability to carry equipment (masts, sails, rigid rods, cables, ...) necessary for the implementation and maintenance of the functions presented supra. Long-distance navigation may indeed lead to failures of certain components of the equipment.
- One of the interesting features of the proposed system is that the equipment used is relatively small. In one embodiment of the present invention, it is expected to embark in the cockpit a supply of equipment, which can be used to overcome any failure. Unlike a classic sailboat, where dismasting usually creates a catastrophic situation, the breakage of an element such as a mast, a connecting rod, a cable, a sail or a float, will lend little importance here, because none of these elements is neither unique nor irreplaceable.
- the cabin is carried by a conventional hull, able to float by its own means. It plays the role of one of the floats discussed above, and can in particular carry its own mast, and receive the necessary devices to compensate for the capsizing forces of neighboring floats.
- the hull carrying the cockpit carries the only mast, whose capsizing forces are compensated by two floats located on either side of the hull that carries the cockpit.
- the cabin is towed, for example by means of rods or cables.
- the motor device exerts on it essentially horizontal forces.
- One embodiment uses a conventional shell; another embodiment implements a shell mounted on "foils"; a third embodiment uses a hull capable of going underwater; a fourth embodiment provides a shell capable of taking off from the surface of the water.
- any hull may be suitable.
- This embodiment uses a hull with "foils”, capable of "squirting” from a sufficient speed, which significantly reduces the interaction with water. Solutions have been imagined (hydrofoil) that combine such a principle with propulsion by a sail. However, in these solutions, the mechanical design and control are very delicate, because the structure must absorb all the constraints related to the fact that the mast is rigidly bonded to the foils.
- This embodiment of the present invention aims at the comfort of the crew by sea very strong. Indeed in this case, it can be very difficult for the crew to live on a boat tossed by the waves.
- a sealed shell connected to the surface of the water by a tube allowing the renewal of air, and connected to the motor device described above, is equipped in this embodiment with a foil capable of exerting a directed vertical force. down, likely to cause said shell down.
- the invention is then transformed into a "sailing submarine", and allows the crew to face difficult seas in much more comfortable conditions.
- the shell is equipped with wings capable of creating from a certain speed relative to the air a lift force allowing it to take off. It is necessary to compensate for the reaction force directed upwards created by this wing.
- the floats connected to the hull are equipped with foils capable of creating a force directed downwards capable of compensating for this force.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Other Liquid Machine Or Engine Such As Wave Power Use (AREA)
Description
- La présente invention concerne un navire multicoque utilisant comme force motrice des éléments naturels tels que la force du vent ou des vagues selon le préambule de la revendication 1, tel que connu de US-A-606104.
- Dans les voiliers classiques, la force du vent a tendance à faire gîter le bateau. Pour les multicoques, la stabilité est obtenue par l'élargissement du "polygone de sustentation". Classiquement, la voilure est portée par un nombre limité de mâts, reliés rigidement aux coques, elles-mêmes rigidement fixées les unes aux autres (à l'exception d'une éventuelle possibilité de rotation du mât sur son axe).
- Ces caractéristiques ont pour conséquence :
- une surface de voilure directement fonction de la hauteur du ou des mâts, ce qui implique des contraintes énormes dans les "maxi-voiliers" (capables de porter "au près" plusieurs centaines de m2 de voilure),
- la quasi-impossibilité de compenser le poids du voilier par la portance créée par la vitesse du bateau (au contraire des planches à voile), et donc un ralentissement du bateau à chaque choc dans une vague,
- la nécessité de réduire, parfois considérablement, la voilure lorsque le vent forcit.
- L'objet de la présente invention est de permettre un déplacement sur l'eau caractérisé par les points suivants :
- la capacité à utiliser la force motrice du vent ou des vagues,
- un déplacement d'eau quasiment nul, indépendant de la surface de voilure mise en oeuvre,
- une masse minimale,
- des composants mécaniques élémentaires simples, robustes et facilement remplaçables en cas d'avarie,
- la capacité pour l'ensemble de "planer" sur l'eau même pour des vents faibles, d'où une résistance de l'eau quasiment nulle,
- la capacité pour l'habitacle de s'enfoncer sous l'eau,
- la capacité pour l'habitacle de décoller de la surface de l'eau,
- une surface de voilure équivalente à celle des voiliers "classiques", mais répartie sur des mâts de hauteur beaucoup plus faible,
- la capacité de conserver toute la toile même par vent très fort (chaque voile a une surface relativement faible, et crée donc une force compatible avec la résistance des mâts, même si ces derniers sont relativement légers et le vent fort).
- Pour atteindre cet objet, la présente invention prévoit de façon générale de remplacer la structure rigide du voilier par une structure hautement déformable, constituée d'un habitacle et d'un "attelage" de "flotteurs" reliés par des liaisons inter-flotteurs, constituées de câbles ou de tiges rigides articulées, et par un ensemble de mâts. Certains de ces mâts peuvent porter une voile, d'où le terme "voilure distribuée". Cette architecture sépare donc plusieurs fonctions classiquement réunies dans la structure rigide d'un bateau :
-
- l'habitacle se limite à une structure aussi légère que possible pour résister au poids de l'équipage et de son équipement,
- cet habitacle peut être remorqué par l'attelage de flotteurs ;
- cet habitacle peut disposer d'ailerons disposés au contact de l'eau, capables de générer une force dont la direction et l'intensité dépendent de la géométrie et de la position, ainsi que de la vitesse par rapport à l'eau, communément appelés "foils" ; ces "foils" pourront être disposés de manière à engendrer une force verticale dirigée vers le haut, permettant ainsi à l'habitacle de ne toucher l'eau que par l'intermédiaire desdits "foils",
- cet habitacle peut disposer de "foils" dont l'action engendre une force verticale dirigée vers le bas, qui lui permettront de s'enfoncer sous l'eau,
- cet habitacle peut disposer d'ailes qui lui permettront de décoller de la surface de l'eau,
-
- fonction de "prise au vent", assurée par n voiles, portées par n mâts positionnés sur n "flotteurs au vent",
- fonction de résistance au moment de chavirement créé par l'effet du vent sur la voile, assurée par le report sur d'autres flotteurs de la force de chavirement exercée sur une voile,
- fonction de résistance à la force de dérive, assurée par des dérives portées par chaque flotteur ;
-
- capacité à avancer dans une direction déterminée, assurée par l'asservissement des mouvements de l'ensemble des flotteurs à la direction déterminée par au moins un flotteur "directeur",
- capacité à changer de direction, assurée par un gréement permettant de définir la nouvelle direction, et si nécessaire par un gréement permettant de modifier la relation entre les voiles et les mâts.
- L'invention peut être considérée comme un "train de planches à voile", reliées par des articulations. Lesdites articulations pourront être constituées de tiges rigides (capables de travailler en compression ou en traction) ou de câbles (capables de travailler uniquement en traction). Ces articulations sont fixées sur deux flotteurs distincts, qu'elles associent. Lorsqu'un câble est utilisé, une fixation quelconque est suffisante. Lorsqu'une tige rigide est utilisée, l'articulation comprendra une pièce mécanique (type cardan) permettant à ladite tige de prendre par rapport à chaque flotteur une orientation quelconque.
- L'invention combine les avantages d'une planche à voile et la capacité à tracter un habitacle compatible avec de longs voyages effectués éventuellement en équipage.
- Plus particulièrement, la présente invention prévoit un navire à voiles, comprenant une pluralité de flotteurs dont certains portant des voiles liées à des mâts, caractérisé en ce que les flotteurs sont mobiles les uns par rapport aux autres, en ce que la position et l'orientation relative desdits flotteurs sont réglées au moyen d'un ensemble de liaisons inter-flotteurs, et en ce que le gréement qui permet de définir et de maintenir la position de chaque mât relie ledit mât à au moins un autre flotteur que celui qui porte ledit mât.
- Selon un mode de réalisation de la présente invention, les flotteurs sont disposés en ligne.
- Selon un mode de réalisation de la présente invention, les flotteurs et les liaisons inter-flotteurs sont disposés de manière à former un ensemble de figures géométriques fermées, telles que par exemple des triangles.
- Selon un mode de réalisation de la présente invention, les liaisons inter-flotteurs sont constituées de tiges rigides, fixées à chaque flotteur au moyen d'une articulation, telle que par exemple un cardan.
- Selon un mode de réalisation de la présente invention, les liaisons inter-flotteurs sont constituées de câbles.
- Selon un mode de réalisation de la présente invention, les composantes du gréement qui relient un mât à un flotteur différent de celui qui porte ledit mât sont constituées de câbles.
- Selon un mode de réalisation de la présente invention, les composantes du gréement qui relient un mât à un flotteur différent de celui qui porte ledit mât comportent des tiges rigides.
- Selon un mode de réalisation de la présente invention, au moins un flotteur porte deux voiles, portées par deux mâts, disposées de telle sorte que l'effet du vent sur l'une de ces voiles ait tendance à enfoncer le flotteur sous l'eau, et que l'effet du vent sur l'autre voile ait tendance à faire décoller le flotteur.
- Selon un mode de réalisation de la présente invention, les flotteurs remorquent au moyen de liaisons tractrices un habitacle disposant d'ailes qui lui permettent de s'élever au-dessus de la mer à partir d'une vitesse relative au vent suffisante.
- Selon un mode de réalisation de la présente invention, les flotteurs remorquent au moyen de liaisons tractrices un habitacle capable de s'enfoncer au-dessous du niveau de la mer, par exemple sous l'effet de l'action d'un foil.
- Selon un mode de réalisation de la présente invention, l'énergie correspondant aux mouvements de rotation des tiges rigides est transmise à un dispositif moteur, tel qu'une hélice.
- Ces objets, caractéristiques et avantages, ainsi que d'autres de la présente invention, seront exposés en détail dans la description suivante de modes de réalisation particuliers, faite à titre non-limitatif en relation avec les figures très schématiques jointes, parmi lesquelles :
- la figure 1 représente une vue d'ensemble en perspective d'un Navire à Voilure Distribuée à 4 flotteurs et deux voiles, naviguant tribord amure au près, où la force de chavirement est compensée par des câbles,
- la figure 2 représente une vue de côté de l'un des flotteurs du système présenté à la figure 1,
- la figure 3 représente une vue d'en haut du système représenté sur la figure 1, réglé pour permettre de naviguer tribord amure par vent travers,
- la figure 4 représente une vue schématique illustrant le principe d'un "foil" destiné à créer une force verticale dirigée vers le bas,
- la figure 5 représente une vue schématique de face illustrant la possibilité de disposer deux voiles sur chaque flotteur, la force de chavirement étant compensée par des câbles,
- la figure 6 représente une vue schématique de face illustrant la possibilité de compenser la force de chavirement par des tiges rigides,
- la figure 7 représente une vue en perspective d'un système de Navire à Voilure Distribuée à 7 flotteurs et 3 voiles, où les flotteurs sont associés en groupe de 3, et où la force de chavirement est compensée par des tiges rigides,
- la figure 8 représente le gréement nécessaire au virement de bord pour le Navire à Voilure Distribuée présenté à la figure 7,
- la figure 9 est une coupe verticale représentant 3 flotteurs d'un système de Navire à Voilure Distribuée mettant en oeuvre la force des vagues.
- Selon un mode de réalisation de la présente invention, illustré en figures 1 à 3, une coque 1 est remorquée par des câbles 2 à un ensemble de quatre flotteurs 3 équipés de dérives 4, dont les deux centraux sont équipés de voiles 5. Pour faciliter la compréhension des schémas, les pièces relatives à un flotteur donné seront identifiées par une lettre (a, b, c, d). Les flotteurs 3a, 3b, 3c et 3d apparaissent de gauche à droite sur la figure 1. Dans cette figure, le Navire: à Voilure Distribuée se déplace vers le coin supérieur gauche de la figure.
- La coque 1 est remorquée par des câbles tracteurs 2 (2b et 2c) fixés à l'arrière des flotteurs 3b et 3c. L'équipage pourra vivre dans la coque 1, qui lui sert donc "d'habitacle", et c'est de là qu'il fera les manoeuvres nécessaires. Tous les flotteurs sont équipés de dérives 4 (4a, 4b, 4c, 4d). Les flotteurs 3b et 3c portent des voiles 5 (5b et 5c). Ces voiles sont du type de celles utilisées dans les planches à voile. Chaque voile comporte un mât 6 (6b et 6c), fixé au flotteur par un pied de mât 7 (7b et 7c) qui permet au mât de tourner librement par rapport au flotteur. Les pieds de mât sont du type de ceux utilisés dans les planches à voile.
- Dans cette configuration, l'effet du vent sur les voiles 5 (5b et 5c) a tendance à faire pivoter les mâts 6 (6b et 6c). Il faut donc équiper lesdits mâts 6 (6b et 6c) d'un gréement qui permet de définir la position des mâts, et de maintenir cette position. Ce problème peut se décomposer en deux parties : contrôler l'équilibre antéro-postérieur des mâts, contrôler l'équilibre latéral des mâts.
- Le contrôle de l'équilibre antéro-postérieur sera assuré, comme sur plusieurs voiliers classiques, par deux câbles fixés en tête de mât et accrochés respectivement à l'avant (étai) et à l'arrière (pataras) du flotteur. Il faut cependant que ces câbles ne gênent pas les mouvements de la voile, ce qui nécessite que le point d'accroche sur le flotteur soit le plus en avant (ou le plus en arrière) possible. Pour cela, les flotteurs 3b et 3c portent à l'avant une base d'étai rigide 8 (8b et 8c), qui permet d'avancer le point d'accroche sur le flotteur de l'étai, sans pour autant devoir allonger l'étai. Sur la base d'étai 8 est fixée une poulie 9 (9b et 9c) qui permet à un étai 10 (10b et 10c) de relier le sommet du mât 6 (6b et 6c) à la coque 1. Les flotteurs 3b et 3c portent à l'arrière une base de pataras 11 (11b et 11c), sur laquelle est fixée une poulie 12 (12b et 12c) qui permet à un pataras 13 (13b et 13c) de relier le sommet du mât 6 à la coque 1. La possibilité de réglage de l'étai 10 et du pataras 13 permettra de s'adapter aux différentes allures (position relative du vent par rapport à la route suivie par le flotteur), et si nécessaire d'utiliser la coque 1 pour contribuer à 11 équilibre du mât 6. Ainsi, vent arrière, les mâts 6 sont soumis à une force qui a tendance à les faire basculer vers l'avant. La traction exercée par le pataras 13 sur le mât 6 compensera cette force. Au près, le mât a tendance à basculer vers l'arrière, ce qui sera compensé par l'étai.
- Le contrôle de l'équilibre des mâts 6 dépend également de l'angle entre le vent et les voiles 5. Pour permettre ce contrôle, les voiles 5 comportent une bôme 14 (barre rigide à la base de la voile). Des écoutes 15 (15b et 15c) relient les extrémités arrière des bômes 14 à la coque 1, en passant par des poulies 16 (16b et 16c) fixées à l'arrière des flotteurs 3b et 3c. Un câble de liaison 17 relie les extrémités arrière des bômes 14. De cette manière, l'équipage peut depuis la coque 1 régler l'angle entre les voiles 5 et le vent.
- La solution utilisée pour l'équilibre antéro-postérieur ne peut s'appliquer au contrôle de l'équilibre latéral. Dans les voiliers classiques, le mât est maintenu latéralement au moyen de haubans. L'effet de chavirement est compensé par la quille et son lest, ou par la largeur du multicoque. Dans notre cas, de tels haubans ne pourraient être fixés sur le flotteur qui porte le mât. En effet, la largeur des flotteurs 3 est trop limitée pour permettre une action efficace d'un éventuel hauban. Le principe du hauban peut cependant être utilisé, à condition qu'il soit fixé sur un autre flotteur que celui qui porte le mât. Il faut alors qu'un dispositif soit mis en oeuvre pour compenser la force de rapprochement des flotteurs qu'exercerait un hauban. Ce dispositif est une liaison inter-flotteurs, qui peut être mise en oeuvre de la manière suivante.
- Les flotteurs 3 sont reliés par des tiges rigides de liaison 18 (18a1, 18a2, 18b1, 18b2, 18c1, 18c2). Deux flotteurs voisins sont reliés par deux telles tiges, situées respectivement à l'avant et à l'arrière de chaque flotteur. On notera que l'utilisation de deux tiges permet d'imposer à deux flotteurs 3 voisins et aux deux tiges qui les relient de former un parallélogramme déformable. La mer n'étant pas plate, il faut que les flotteurs puissent monter et descendre relativement l'un à l'autre. Par ailleurs, le réglage du navire selon les diverses allures pourra nécessiter de faire varier la position relative des flotteurs dans un plan horizontal. Il est donc nécessaire de permettre aux tiges rigides 18 d'être articulées par rapport aux flotteurs. Les extrémités de chaque tige sont fixées aux flotteurs par des articulations 19 de type cardan, qui leur permettent de tourner librement selon deux axes. Le flotteur 3b joue un rôle de "flotteur directeur". Il est en effet relié à la coque 1 par un câble directeur 20 qui se fixe à l'avant du flotteur 3b. On verra au paragraphe "définition de la direction du Navire" comment ce câble directeur est utilisé. Les mâts 6 des flotteurs 3b et 3c sont reliés aux flotteurs qui les encadrent (le 3a et le 3c dans le cas du flotteur 3b, le 3b et le 3d dans le cas du flotteur 3c) par des câbles anti-chavirement 21 (21a, 21b, 21c, 21d), dont une extrémité est fixée sur le sommet du mât 6. Ces câbles anti-chavirement 21 jouent le rôle des haubans d'un voilier classique. L'arrière du flotteur 3a (respectivement du flotteur 3d) est relié au flotteur 3b (respectivement au flotteur 3c) par un câble 22a (respectivement 22d), de longueur fixe.
- Grâce aux pieds de mâts 7, les mâts 6 peuvent tourner autour de deux axes horizontaux, l'un perpendiculaire à la direction des flotteurs (équilibre antéro-postérieur), et l'autre parallèle à cette direction (équilibre latéral).
- L'équipage peut régler la tension exercée sur l'étai 10 et le pataras 13 de chaque voile portée par les flotteurs 3b et 3c. Cela permet de transmettre aux flotteurs 3b et 3c les forces nécessaires à l'équilibre antéro-postérieur de la voile. Ces forces seront compensées par la force de flottaison générée par l'interaction entre l'eau et le flotteur. On notera que le fait de tirer, depuis la coque 1 sur un câble tel que le pataras 13 pourrait avoir tendance à rapprocher ladite coque 1 des flotteurs_ 3...Cependant, la coque 1 est tirée par les câbles 2. On peut donc exercer au moyen de câbles tels que le pataras 13 des forces dont la résultante reste inférieure à la force de traction des câbles 2. Pour éventuellement pouvoir exercer des forces supérieures, on pourra remplacer l'un des câbles 2 par une tige rigide. Ce principe peut s'appliquer à chaque câble permettant de régler les composants du Navire à Voilure Distribuée, et ne sera pas décrit à nouveau par la suite.
- La figure 1 représente une vue en perspective du Navire à Voilure Distribuée, le vent étant représenté par la flèche 23. Le vent fait un angle d'environ 30° avec la direction suivie par les flotteurs. Le Navire à Voilure Distribuée navigue donc tribord amure, au près. Le vent a tendance à faire chavirer vers bâbord les mâts 6, ce qui explique que ceux-ci penchent vers bâbord. De ce fait, les câbles anti-chavirement 21b et 21d qui relient le sommet des mâts 6 à un flotteur "au vent" sont tendus, alors que les câbles anti-chavirement 21a et 21c qui relient le sommet des mâts 6 à un flotteur "sous le vent" sont détendus. Le flotteur 3c est soumis à plusieurs forces, qui s'équilibrent :
- une force F1, dirigée vers le sommet du mât 6b, transmise par le câble anti-chavirement 21b (cette force empêche le mât 6b de s'incliner plus vers bâbord) ;
- le poids du mât 6c et de la voile 5c, dirigé vers le bas ;
- une force F2, dirigée vers le flotteur 3d, transmise par le câble anti-chavirement 21d, d'intensité égale à celle de F1,
- la force engendrée par l'effet du vent sur la voile ; compte tenu de l'inclinaison du mât 6c vers bâbord, cette force a une composante verticale dirigée vers le bas,
- la force de flottaison générée par l'interaction entre le flotteur et l'eau.
- La force F1 se décompose en une composante de dérive horizontale, qui sera compensée par la dérive 7c, et une composante verticale Fv1 dirigée vers le haut. De même, la force F2 se décompose en une composante horizontale, qui empêche le mât 6b de chavirer, et une composante Fv2 dirigée vers le bas. On remarque que Fv1 et Fv2 ont la même intensité. Si l'on fait le bilan des forces verticales, on constate donc que la résultante des forces qui s'exercent sur le flotteur, à l'exception de la force de flottaison, est dirigée vers le bas. La force de flottaison permettra donc d'assurer l'équilibre vertical de ce flotteur.
- En appliquant un raisonnement du même type aux flotteurs 3a et 3b, on constate qu'ils sont en équilibre vertical. Par contre, pour le flotteur 3d, il n'y a que le poids du flotteur qui génère une force dirigée vers le bas. C'est le moment de redressement exercé par ce poids sur le mât 6c qui compensera le moment de chavirement exercé par le vent sur la voile 5c. Il faudra donc prévoir un poids "suffisant" pour le flotteur 3d. La valeur exacte du poids nécessaire sera déterminée en fonction de la force exercée par le vent sur la voile, qui peut être estimée par l'homme de l'art en fonction de caractéristiques telles que la surface de la voile. Pour la même raison, le poids du flotteur 3a devra être équivalent à celui du flotteur 3d (de manière à permettre à ce flotteur de jouer son rôle de "contrepoids" lorsque le navire naviguera bâbord amure).
- La direction du navire est déterminée par la tension relative exercée sur le câble tracteur 2b, ainsi que sur le câble directeur 20. Sous l'effet de traction exercée par le vent sur les voiles et transmis aux flotteurs, ces câbles sont sous tension.
- Lorsque l'équipage veut avancer en ligne droite, les moments exercés par ces câbles sur le flotteur 3b se compensent.
- Pour changer de direction, l'équipage fait varier la tension exercée sur le câble directeur 20, ce qui fait varier le moment qu'il exerce sur le flotteur, et permet donc d'orienter ce dernier dans la direction choisie. Puis, l'équipage règle la longueur des câbles tracteurs 2b et 2c, ce qui détermine la position relative du flotteur 3b et du flotteur 3c (ce dernier reste parallèle au flotteur 3b, du fait de l'action des tiges rigides de liaison 18 qui les relient, mais il peut avancer ou reculer par rapport au flotteur 3b). Les flotteurs 3a et 3d restent immobiles relativement respectivement au flotteur 3b et au flotteur 3c, du fait de l'action combinée des tiges rigides de liaison 18 et des câbles 22a et 22d.
- L'angle entre les bômes 14 et le vent est réglé par les écoutes 15. Lorsque le navire navigue tribord amure, c'est l'écoute 15c qui est tendue (réciproquement, c'est l'écoute 15b qui est tendue sous bâbord amure). Le câble de liaison 17 permet de ne régler que la bôme 14 au vent (dans la figure 1, il s'agit donc de la bôme 14c) : la position de la bôme 14 sous le vent (14b dans la figure 1) se trouve en effet déterminée par la longueur (fixe) du câble de liaison 17, dès lors que la bôme 14 au vent a été réglée par l'écoute 15 correspondante.
- L'équipage doit faire varier la position relative des flotteurs 3b et 3c, selon l'angle entre la direction du vent et le cap suivi par les flotteurs (allure). La figure 3 représente une vue d'en haut du navire lorsque le vent est à 90° du cap suivi par les flotteurs (vent de travers). Si les flotteurs avaient conservé la position relative qu'ils occupaient dans la figure 1, la voile 5c "déventerait" la voile 5b. L'équipage choisira en fonction de l'allure une position relative des flotteurs qui permette de garder les deux voiles gonflées.
- Lors d'un virement de bord, l'équilibre latéral des mâts 6 change. Ainsi, sous bâbord amure, ce sont les câbles anti-chavirement 21a et 21c qui sont tendus, les câbles anti-chavirement 21b et 21d devenant détendus.
- L'homme de l'art pourra appliquer le principe décrit précédemment en utilisant non pas deux flotteurs centraux porteurs de voile, mais un nombre n quelconque de tels flotteurs, multipliant ainsi la surface de voilure utile, et donc la force motrice. Les (n+2) flotteurs restent liés deux à deux par des tiges de liaison 18, et forment donc une "ligne".
- Pour éviter d'augmenter trop la largeur du navire, plusieurs telles lignes de (n+2) flotteurs peuvent être formées. Deux lignes successives sont reliées par des câbles d'une longueur suffisante pour qu'une ligne ne "dévente" pas la ligne suivante.
- D'autres approches pourront être utilisées pour piloter le ou les flotteurs directeurs. Ainsi, le flotteur directeur peut être doté d'un gouvernail sur lequel l'équipage agit au moyen de câbles.
- Chaque flotteur extrême (à gauche et à droite, 3a et 3d dans la figure 1) doit exercer une force verticale dirigée vers le bas pour empêcher le chavirement du mât voisin. Cette force peut être générée par un "foil" 27 adéquat (surface immergée sous le flotteur, orientée de telle sorte que l'effet de l'eau sur cette surface génère une force verticale dirigée vers le bas). La figure 4 représente schématiquement une vue latérale d'un flotteur 3d équipé d'un tel "foil" 27d (le flotteur 3d avance vers la gauche de la figure, l'eau exerce donc sur le foil 27d une force dirigée vers le bas).
- L'homme de l'art pourra proposer des solutions qui permettent de contrôler l'ensemble des étais 10 par un seul câble. De même, l'ensemble des pataras 13 pourra être contrôlé au moyen d'un seul câble. En effet, toutes les voiles sont orientées de la même manière, et tous les mâts peuvent donc être orientés de la même manière. De plus, compte tenu du fait qu'un allongement de l'étai doit s'accompagner d'un raccourcissement du pataras, un câble unique pourra être utilisé pour obtenir ce réglage.
- Selon les caractéristiques des flotteurs, le réglage de l'étai et du pataras est plus ou moins crucial. En particulier, si le flotteur retenu a une longueur suffisante, on pourra imposer une longueur fixe à l'étai et au pataras, évitant ainsi de devoir régler ces câbles depuis l'habitacle. Dans ce cas, selon l'allure suivie, l'équilibre antéro-postérieur du flotteur pourra varier (tendance à l'enfoncement de l'arrière du flotteur ou de l'avant du flotteur, selon la direction du vent par rapport à l'axe du flotteur). On notera qu'une alternative à la variation de l'orientation du mât est un déplacement du pied de mât vers l'avant ou vers l'arrière.
- Ces tiges ne sont nécessaires que pour éviter que deux flotteurs voisins puissent trop s'approcher l'un de l'autre. En effet, les câbles anti-chavirement empêcheront des flotteurs voisins de s'éloigner trop l'un de l'autre. Il est possible de supprimer ces tiges rigides de liaison 18 en contrôlant la direction de chaque flotteur, par exemple par le truchement d'un "câble directeur" du type du câble 20, installé sur chaque flotteur, ou par tout autre moyen approprié permettant de contrôler la direction suivie par chaque flotteur.
- Bien que le mode de réalisation décrit propose de mettre en oeuvre des voiles de .planche à voile, rien n'interdit d'utiliser des voiles de forme ou de taille très différentes. On notera en particulier que la description précédente faisait appel, pour des raisons de commodité, à la notion de bôme (14), alors qu'habituellement cette pièce est remplacée dans les voiles de planche à voile par un "wishbone". On pourra selon les cas utiliser une bôme ou un wishbone pour régler le plan de la voilure par rapport à la direction du vent. De même, des flotteurs de type quelconque pourront être mis en oeuvre.
- Dans le mode de réalisation de la présente invention, représenté dans la figure 5, le flotteur 3b porte deux voiles (5b et 5'b), et le flotteur 3c porte également deux voiles (5c et 5'c). Aucun des mâts 6 n'est vertical. Les mâts 6b et 6c sont inclinés sous le vent, les mâts 6'b et 6'c sont inclinés au vent. La voile 5c exerce sur le flotteur 3c une force dont la composante verticale est dirigée vers le bas, alors que la voile 5'c exerce sur le flotteur 3c une force dont la composante verticale est dirigée vers le haut. Les sommets des deux mâts d'un même flotteur sont reliés par un câble 39. Les bômes 14b et 14c pointent vers l'arrière du flotteur, alors que les bômes 14'b et 14'c pointent vers son avant (ceci permet d'éviter que la voile 5'b (respectivement la voile 5'c) ne dévente la voile 5b (respectivement 5c).
- Dans cette configuration, les deux voiles jouent un rôle symétrique, et les câbles 21 gardent une tension constante. Lors du virement de bord, les voiles changent de rôle, celle qui tendait à enfoncer le flotteur ayant après le virement de bord tendance à le faire décoller, et réciproquement. Aucune manoeuvre spécifique n'est donc nécessaire au niveau du mât, ni au niveau de la tête de la voile.
- Dans une telle approche, la résultante des forces verticales exercées par le vent sur chaque flotteur est approximativement nulle. L'effet anti-chavirement ne peut donc reposer que sur le poids du flotteur, ou sur une force exercée par un "foil" (similaire à celui décrit au paragraphe 2.2).
- Dans cette approche, décrite dans la figure 6, on conserve l'ordonnancement "en ligne" représenté dans la figure 1, à l'exception des câbles anti-chavirement 21 et des tiges rigides de liaison 18. Les câbles anti-chavirement 21 sont remplacés par des tiges rigides 21' travaillant en compression. Dans ce cas, l'effet anti-chavirement est obtenu par transfert au flotteur "sous le vent" des forces de chavirement (alors que jusqu'ici nous avions considéré uniquement un transfert de ces forces aux flotteurs "au vent"). Ces tiges rigides s'appuient sur un support 24b (respectivement 24c), fixé sur l'avant du mât 6b (respectivement 6c). Des câbles 25 relient les sommets des mâts 6 aux supports 24. La longueur de ces câbles détermine l'angle d'inclinaison des mâts 6. On notera que, dans la configuration décrite dans la figure 6, ce sont les câbles 25a et 25c qui sont tendus, les câbles 25b et 25d restant détendus. Dans une telle approche, les tiges rigides 18 peuvent être remplacées par des câbles 18'. En effet, les tiges anti-chavirement 21' auront pour effet secondaire de maintenir écartés deux flotteurs voisins (des câbles travaillant en traction suffiront donc à limiter cet écartement).
- La position des supports 24 sur les mâts 6 est déterminée en fonction des caractéristiques des voiles 5 de telle sorte que le centre de poussée de la voile (point sur lequel s'exerce la résultante des forces exercées par le vent sur la voile) soit aussi proche que possible des supports 24. La longueur des câbles de liaison 18'a et l'angle d'inclinaison du mât 6b sont choisis de telle sorte que la force exercée par le vent sur la voile 5b coupe le câble de liaison 18'a à l'intérieur du segment délimité par les flotteurs 3a et 3b. Le même raisonnement s'applique à la voile 5c. Sous ces conditions, la force exercée par le vent ne peut faire chavirer le navire.
- Dans cette approche, les flotteurs sont reliés deux à deux pour former des triangles. La figure 7 représente un agencement possible de tels triangles. Quatre flotteurs "sous le vent" (3a, 3b, 3c, 3d) sont reliés à trois flotteurs "au vent" (3e, 3f, 3g) par des câbles de liaison 18". Tous les flotteurs portent un mât 6, sauf le "dernier" flotteur sous le vent (flotteur 3d). Par ailleurs, les flotteurs 3b, 3c et 3d portent en plus une tige rigide de soutien 21" (21"b, 21"c et 21"d). Le mât 6e est soutenu par le mât 6a et par la tige rigide de soutien 21"b (et de même les mâts au vent 6f et 6g sont soutenus par un mât et une tige rigide).
- Chaque voile 5e, 5f et 5g est "partagée" par deux mâts. Par exemple, la voile 5e est partagée par le mât 6e et par le mât 6a. Le mât "au vent" et le mât "sous le vent" échangent leurs rôles lors du virement de bord. Ces opérations sont rendues possibles par un gréement approprié, qui comprend plusieurs composantes, comme cela est indiqué à la figure 8 (la figure 7 n'étant qu'une vue d'ensemble, ce gréement n'y figure pas d'une manière détaillée). Ainsi, par exemple, pour la voile 5e: - une drisse 26e permet à la fois de hisser la voile sur le mât 6e, et de hisser ledit mât 6e sur son correspondant bâbord 6a. Cette drisse 26e :
- passe par le pied de mât tribord 7e,
- passe par la tête de mât tribord 27e,
- est attachée au point de drisse 28e de la voile 5e,
- passe par la tête de la tige rigide de soutien 21"b, notée 27b,
- passe par la tête de mât bâbord 27a,
- passe par le pied de mât bâbord 7a.
- un hale-bas de mât 31e permet de mettre le mât bâbord 6a en position de "support" pour son correspondant tribord 6e, lorsque le navire navigue "tribord amure". Ce hale-bas de mât :
- passe par le pied de mât tribord 7e,
- passe par la tête de la tige rigide de soutien 21"b, notée 27b,
- passe par la tête de mât bâbord 27a,
- revient vers le pied de mât tribord 7e.
- un hale-bas de mât 31a permet de mettre le mât tribord 6e en position de "support" pour son correspondant bâbord 6a, lorsque le navire navigue "bâbord amure". Ce hale-bas de mât :
- passe par le pied de mât bâbord 7a,
- passe par la tête de la tige rigide de soutien 21"b, notée 27b,
- passe par la tête de mât tribord 27e,
- revient vers le pied de mât bâbord 7a.
- un hale-bas de bôme 32e permet de fixer la bôme 14e sur le mât adéquat. Ce hale-bas de bôme 32e :
- passe par le pied de mât tribord 7e,
- passe par un point de hale-bas 33e du mât tribord 6e situé à la hauteur désirée,
- est fixé au point d'amure 34e de la bôme 14e (le point qui doit être le plus proche du mât),
- passe par un point de hale-bas 33a du mât bâbord 6a situé à la hauteur désirée,
- passe par le pied de mât bâbord 7a,
- une écoute 15e permet de régler la voile 5e, et :
- part du flotteur tribord 3e,
- est fixée au point d'écoute 34e de la voile 5e,
- arrive au flotteur bâbord 3a.
- Les manoeuvres sont contrôlées depuis la coque 1. Dans un mode de réalisation de l'invention, toutes les extrémités des câbles qui permettent de contrôler ces manoeuvres sont rapportées à la coque 1 (drisses 26, hale-bas de mât 31, hale-bas de bôme 32, écoutes 15). Pour simplifier la manoeuvre, d'autres modes de réalisation pourront être proposés, permettant de ne manipuler depuis la coque 1 que 8 câbles de contrôle (répartis en deux groupes, un groupe de câbles bâbord et un groupe de câbles tribord, et permettant de contrôler respectivement les drisses,- les- hales-bas de mât, les hale-bas de bôme, les écoutes). Ces câbles de contrôle seront par exemple fixés à l'avant du flotteur de tête bâbord (respectivement tribord) et passeront sur chaque flotteur bâbord (respectivement tribord). Il pourra s'avérer utile de les regrouper dans des gaines fixées aux tiges de liaison 18.
- Le virement de bord se fait de la manière suivante pour un groupe de 3 flotteurs. Supposons que l'on navigue sous tribord amure (la voile 5e est donc portée par le flotteur 3e). La drisse 26e est bordée (tirée) sur le flotteur bâbord 3a qui va recevoir la voile. De même, le hale-bas de mât 31e qui pèse sur le mât bâbord est choqué (relâché). De ce fait, le mât bâbord 6a monte vers la tête de mât tribord 27e. Lorsque les deux têtes de mât se rejoignent, le point de drisse 28e de la voile arrive au contact de la tête de mât bâbord 27a. La drisse 26e est alors bloquée sur le flotteur bâbord 3a, et choquée sur le flotteur tribord 3e. Simultanément, on borde le hale-bas de mât 31a, qui pèse alors sur le mât tribord 6e. De ce fait, le point de drisse 28e de la voile reste au contact de la tête de mât bâbord 27a, alors que la tête de mât tribord 27e s'éloigne en s'abaissant.
- On notera que de nombreuses autres configurations où les flotteurs 3 et les tiges rigides de liaison 18 forment des figures fermées pourront être proposées. Il pourra dans certains cas être intéressant de contrôler l'équilibre des mâts 6 par plus que deux câbles anti-chavirement 21, liant ainsi un mât à plus que deux flotteurs.
- On notera également que l'utilisation combinée de câbles anti-chavirement 21 et tiges rigides anti-chavirement 21' peut éventuellement permettre de limiter à deux le nombre de flotteurs. Dans une telle configuration, le flotteur "sous le vent" a son mât maintenu par un câble anti-chavirement 21 qui tire sur le flotteur "au vent", et le mât de ce dernier est maintenu par une tige rigide anti-chavirement 21' qui appuie sur le flotteur "sous le vent".
- De nombreuses combinaisons des câbles et des tiges anti-chavirement, ainsi que des câbles et tiges de liaison inter-flotteurs sont envisageables. Le choix retenu optimisera les caractéristiques mécaniques de ces composants, en tenant compte de leur interaction avec la mer. On choisira ainsi de préférence des câbles comme composants destinés à être au contact ou proches de l'eau.
- Selon un mode de réalisation de la présente invention, la force motrice des vagues est mise à profit. La figure 9 représente le principe mis en oeuvre.
- Sous l'effet des vagues, les flotteurs 3 sont soumis à des mouvements relatifs verticaux. Le flotteur 3b est relié au flotteur 3a par la tige 18a. Ladite tige 18a est fixée au flotteur 3b par une articulation 35b1, et au flotteur 3a par une articulation 35a2. De même, le flotteur 3b est relié au flotteur 3c par une tige 18b, qui est fixée au flotteur 3b par une articulation 35b2, et au flotteur 3c par une articulation 35c1. Lesdites articulations 35 sont de type cardan, et autorisent les mouvements de rotation par rapport à un axe horizontal parallèle à l'axe du flotteur. Lesdits mouvements de rotation de la tige 18a sont transmis par un système d'engrenage démultiplicateur 36b1 à une hélice 37b portée par le flotteur 3b. Un dispositif de type "roue libre" 38b1 est positionné entre l'articulation 35b1 et l'hélice 37b. Ladite roue libre 38b1 permet d'entraîner l'hélice 37b (dans le sens qui lui permet de propulser le flotteur 3b) lors des mouvements de rotation anti-horaire de la tige 18a. Au contraire, cette même roue libre 38b1 permet de désolidariser l'hélice 37b de la tige 18a lors des mouvements de rotation horaire de cette dernière. Ainsi, lorsque le flotteur 3a "descend" par rapport au flotteur 3b, l'hélice de ce dernier est entraînée (alors qu'elle ne l'est pas lorsque le flotteur 3a "monte" par rapport au flotteur 3b). Les mouvements de rotation de la tige 18b sont également transmis à l'hélice 37b, au moyen d'un engrenage démultiplicateur 36b2 et d'un dispositif "roue libre" 38b2. Les autres flotteurs 3 peuvent être équipés de dispositifs similaires.
- Diverses variantes d'un tel principe, permettant de tirer le meilleur parti moteur de la multiplicité des flotteurs et de leurs mouvements verticaux, pourront être proposées par l'homme de l'art. Par exemple, les articulations 35 peuvent être solidaires de dispositifs "inverseurs", permettant de transmettre un mouvement propulseur à l'hélice quel que soit le sens de rotation de la tige 18.
- Bien que l'on ait décrit ci-dessus l'utilisation de la force des vagues comme complément à une voilure, on notera que l'on peut réaliser un navire uniquement mû par la force des vagues, ou en complément à un autre mode de propulsions (rames, pagaies, ...). Dans ce cas également, on pourra avoir un navire à deux flotteurs seulement.
- Elle impose de pouvoir abriter un équipage et les matériels nécessaires à une navigation au long cours. Dans un mode de réalisation de la présente invention, l'habitacle est intégré au dispositif moteur (il est porté par l'un des flotteurs 3). Dans un autre mode de réalisation, la coque qui le porte est remorquée par le dispositif moteur.
- Une caractéristique intéressante de cet habitacle est sa capacité à emporter les matériels (mâts, voiles, tiges rigides, câbles, ...) nécessaires à la mise en oeuvre et à la maintenance des fonctions présentées supra. Une navigation au long cours peut en effet entraîner des défaillances de certaines composantes du matériel. Une des caractéristiques intéressantes du système proposé consiste en ce que les matériels utilisés sont de relativement faible taille. Dans un mode de réalisation de la présente invention, il est prévu d'embarquer dans l'habitacle une réserve de matériels, qui pourront être utilisés pour pallier toute défaillance. Contrairement à un voilier classique, où le démâtage crée habituellement une situation catastrophique, la rupture d'un élément tel qu'un mât, une tige de liaison, un câble, une voile ou un flotteur, prêtera ici peu à conséquence, car aucun de ces éléments n'est ni unique ni irremplaçable.
- Dans ce mode de réalisation de la présente invention, l'habitacle est porté par une coque classique, capable de flotter par ses propres moyens. Elle joue le rôle de l'un des flotteurs discutés précédemment, et peut en particulier porter son propre mât, et recevoir les dispositifs nécessaires à la compensation des forces de chavirement des flotteurs voisins. Dans un mode particulier de réalisation, la coque qui porte l'habitacle porte le seul mât, dont les forces de chavirement sont compensées par deux flotteurs situés de part et d'autre de la coque qui porte l'habitacle.
- Dans ce mode de réalisation de la présente invention, l'habitacle est tracté, par exemple au moyen de tiges ou de câbles. Le dispositif moteur exerce sur lui des forces essentiellement horizontales. Un mode de réalisation met en oeuvre une coque classique ; un autre mode de réalisation met en oeuvre une coque montée sur "foils" ; un troisième mode de réalisation utilise une coque capable d'aller sous l'eau ; un quatrième mode de réalisation prévoit une coque capable de décoller de la surface de l'eau.
- Dans ce mode de réalisation, n'importe quelle coque pourra convenir. Selon l'objectif visé (confort ou performance), on pourra retenir une coque avec un espace habitable important, ou un coque très légère (type bateau pneumatique à fond plat).
- Ce mode de réalisation met en oeuvre une coque disposant de "foils", capable de "déjauger" à partir d'une vitesse suffisante, ce qui diminue considérablement l'interaction avec l'eau. Des solutions ont été imaginées (hydroptère) qui permettent de combiner un tel principe avec la propulsion par une voile. Cependant, dans ces solutions, la conception mécanique ainsi que le pilotage sont très délicats, car la structure doit absorber toutes les contraintes liées au fait que le mât est rigidement lié aux foils.
- Dans ce mode de réalisation, le fait que l'élément moteur n'est pas porté par les foils simplifie considérablement l'architecture. La mise en oeuvre fera appel aux solutions développées dans d'autres cadres pour faire porter une coque par des foils.
- Ce mode de réalisation de la présente invention vise le confort de l'équipage par mer très forte. En effet dans ce cas, il peut être très difficile pour l'équipage de vivre sur un bateau ballotté par les vagues. Une coque étanche, reliée à la surface de l'eau par un tube permettant le renouvellement de l'air, et reliée au dispositif moteur précédemment décrit, est équipée dans ce mode de réalisation d'un foil capable d'exercer une force verticale dirigée vers le bas, susceptible d'entraîner ladite coque vers le bas. L'invention se transforme alors en un "sous-marin à voile", et permet à l'équipage d'affronter des mers difficiles dans des conditions beaucoup plus confortables. La stabilité verticale sera en particulier assurée par la multiplicité des flotteurs moteurs - en moyenne, la composante verticale de la résultante des forces de traction exercée par l'ensemble de ces flotteurs est en effet constante, même si individuellement chaque flotteur monte et descend au gré des vagues.
- Dans ce mode de réalisation de la présente invention, la coque est équipée d'ailes susceptibles de créer à partir d'une certaine vitesse relative à l'air une force de portance lui permettant de décoller. Il est pour cela nécessaire de compenser la force de réaction dirigée vers le haut créée par cette voilure. Dans un mode particulier de réalisation, les flotteurs reliés à la coque sont équipés de foils capables de créer une force dirigée vers le bas susceptible de compenser cette force.
Claims (11)
- Navire à voiles, comprenant une pluralité de flotteurs dont certains portent un mât, les flotteurs (3) étant mobiles les uns par rapport aux autres, caractérisé en ce que chaque mât porte une voile individuelle la position et l'orientation relative desdits flotteurs (3) sont réglées au moyen d'un ensemble de liaisons inter-flotteurs, et en ce que le gréement qui permet de définir et de maintenir la position de chaque mât (6) relie ledit mât (6) à au moins un autre flotteur (3) que celui qui porte ledit mât (6).
- Navire selon la revendication 1, caractérisé en ce que les flotteurs (3) sont disposés en ligne.
- Navire selon la revendication 1, caractérisé en ce que les flotteurs (3) et les liaisons inter-flotteurs sont disposés de manière à former un ensemble de figures géométriques fermées, telles que par exemple des triangles.
- Navire selon la revendication 1, caractérisé en ce que les liaisons inter-flotteurs sont constituées de tiges rigides (18), fixées à chaque flotteur au moyen d'une articulation (19), telle que par exemple un cardan.
- Navire selon la revendication 1, caractérisé en ce que les liaisons inter-flotteurs sont constituées de câbles (18').
- Navire selon la revendication 1, caractérisé en ce que les composantes du gréement qui relient un mât (6) à un flotteur (3) différent de celui qui porte ledit mât (6) sont constituées de câbles (21).
- Navire selon la revendication 1, caractérisé en ce que les composantes du gréement qui relient un mât (6) à un flotteur (3) différent de celui qui porte ledit mât (6) comportent des tiges rigides (21').
- Navire selon la revendication 1, caractérisé en ce qu'au moins un flotteur (3) porte deux voiles (5 et 5'), portées par deux mâts (6 et 6'), disposées de telle sorte que l'effet du vent sur l'une de ces voiles (5) ait tendance à enfoncer le flotteur (3) sous l'eau, et que l'effet du vent sur l'autre voile (5') ait tendance à faire décoller le flotteur (3).
- Navire selon la revendication 1, caractérisé en ce que les flotteurs (3) remorquent au moyen de liaisons tractrices (2) un habitacle (1) disposant d'ailes qui lui permettent de s'élever au-dessus de la mer à partir d'une vitesse relative au vent suffisante.
- Navire selon la revendication 1, caractérisé en ce que les flotteurs (3) remorquent au moyen de liaisons tractrices (2) un habitacle (1) capable de s'enfoncer au-dessous du niveau de la mer, par exemple sous l'effet de l'action d'un foil (27).
- Navire selon la revendication 4, caractérisé en ce que l'énergie correspondant aux mouvements de rotation des tiges rigides (18) est transmise à un dispositif moteur, tel qu'une hélice (37).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0105855A FR2824311B1 (fr) | 2001-05-02 | 2001-05-02 | Navire a voilure distribuee |
| FR0105855 | 2001-05-02 | ||
| PCT/FR2002/001520 WO2002087961A1 (fr) | 2001-05-02 | 2002-05-02 | Navire a voilure distribuee |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1383675A1 EP1383675A1 (fr) | 2004-01-28 |
| EP1383675B1 true EP1383675B1 (fr) | 2007-04-04 |
Family
ID=8862891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP02738210A Expired - Lifetime EP1383675B1 (fr) | 2001-05-02 | 2002-05-02 | Navire a voilure distribuee |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1383675B1 (fr) |
| FR (1) | FR2824311B1 (fr) |
| WO (1) | WO2002087961A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020002026B3 (de) * | 2020-03-28 | 2021-06-10 | Gunter Kreft | Vorrichtung als vorgeschaltete Antriebseinheit für ein Wasserfahrzeug |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US606104A (en) * | 1898-06-21 | twining | ||
| US2804038A (en) * | 1954-01-19 | 1957-08-27 | Nat Res Dev | Sailing vessels |
| FR2210974A5 (fr) * | 1972-12-14 | 1974-07-12 | Castelas Marcel | |
| DE3425120A1 (de) * | 1984-07-07 | 1986-01-16 | Stefan 2448 Burg Schulz | Segel-katamaran sowie verfahren zur erhoehung von dessen geschwindigkeit |
| FR2670743A1 (fr) * | 1990-12-19 | 1992-06-26 | Salaun Jean Claude | Voilier de vitesse a deux greements. |
| US5553562A (en) * | 1995-06-02 | 1996-09-10 | Jacobs, Jr.; John F. | Double mast iceboat |
-
2001
- 2001-05-02 FR FR0105855A patent/FR2824311B1/fr not_active Expired - Fee Related
-
2002
- 2002-05-02 EP EP02738210A patent/EP1383675B1/fr not_active Expired - Lifetime
- 2002-05-02 WO PCT/FR2002/001520 patent/WO2002087961A1/fr active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| WO2002087961A1 (fr) | 2002-11-07 |
| FR2824311B1 (fr) | 2003-08-22 |
| FR2824311A1 (fr) | 2002-11-08 |
| EP1383675A1 (fr) | 2004-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1373065B1 (fr) | Embarcation nautique tractee par une voilure cerf-volant | |
| US4852507A (en) | Sail-wing and controls for a sail craft | |
| FR2742410A1 (fr) | Engin nautique monocoque | |
| AU678021B2 (en) | Sailboat | |
| US3631828A (en) | Sailboat hydrofoils | |
| EP1383675B1 (fr) | Navire a voilure distribuee | |
| WO2014080148A2 (fr) | Dispositif d'exploration marine | |
| EP0183754B1 (fr) | Procede mecanique pilote de deformation laterale de la structure d'un catamaran | |
| FR2978420A1 (fr) | Engin flottant rapide a propulsion eolienne | |
| EP1024997A1 (fr) | Voilier de course ou de croisiere a mat implante | |
| FR2542274A2 (fr) | Voilier a derive plongeante decalee au vent d'une voile sustentatrice | |
| FR2519311A1 (fr) | Procede et dispositif de reduction du couple de chavirement d'une embarcation a voile | |
| FR2526749A1 (fr) | Voilier a aile a profil hydrodynamique | |
| FR2464878A1 (fr) | Navire de haute mer multicoque | |
| WO1994029168A1 (fr) | Greement comportant une voilure non supportee par un mat et hydroptere pourvu d'un tel greement | |
| EP2042424B1 (fr) | Engin nautique hybride planche à voile/dériveur de sport pourvu d'un mât haubané inclinable simultanément dans le plan transversal et le plan longitudinal | |
| WO1990011219A1 (fr) | Dispositif d'equilibrage, de carene et de reglage d'un voilier de sport | |
| EP0312129A2 (fr) | Bateau à voile | |
| FR2628703A1 (fr) | Voilure pendulaire a incidence variable | |
| US20110100282A1 (en) | High performance human powered displacement boat including user articulating surface skimming outriggers (amaroas), and beaching, docking, heavy water capability | |
| WO1986007325A1 (fr) | Voiliers | |
| FR2625473A1 (fr) | Embarcation du type a propulsion velique derivee, notamment, d'une planche a voile | |
| FR2877913A1 (fr) | Greement trapeze | |
| FR2845966A1 (fr) | Bateau a voiles a coque planante | |
| FR2679864A1 (fr) | Catamaran a voiles. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20031125 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): FR GB |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] |
Effective date: 20070404 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20080107 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20070404 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20150522 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20170131 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160531 |