L'invention concerne le domaine du calibrage des légumes présentant une
forme essentiellement allongée et trouve principalement son application pour le
calibrage automatique des asperges.
Plus précisément, l'invention se rapporte à un système pour le calibrage
automatique de tels légumes destiné à être intégré dans une chaíne de traitement en
aval de moyens conçus pour laver ces légumes et, notamment dans le cas du
traitement des asperges, pour leur conférer une longueur uniforme.
L'opération de calibrage a pour objectif principal de trier les légumes en
fonction de leur taille. Toutefois, pour certains légumes et principalement pour les
asperges, un tel tri doit être opéré en fonction d'autres critères, notamment en
fonction de la couleur des asperges (violette ou blanche). Un autre objectif du
calibrage est de pouvoir éliminer facilement les légumes impropres à la
consommation, dans le cas des asperges notamment celles ayant une tête très fleurie
ou celles présentant des tâches de rouille importantes par exemple.
Il est connu de l'état de la technique différents dispositifs mécaniques
permettant d'opérer de façon automatique un tel calibrage. Ces dispositifs
mécaniques ne permettent d'effectuer le calibrage que selon un seul critère de tri
constitué par le diamètre des asperges.
Parmi ces dispositifs, certains sont basés sur le principe de courroies
divergentes et sont peu fiable dans la mesure où il ne permet pas de distinguer une
petite asperge tordue d'une grosse asperge.
Un dispositif plus perfectionné, décrit dans le brevet français FR 2 570 301
au nom du demandeur permet un meilleur tri des asperges en fonction de leur
diamètre. Toutefois, ce dispositif est également basé uniquement sur l'exploitation
du critère de tri constitué par le diamètre des asperges et ne prend donc pas en
compte d'autres critères tels que la couleur et la forme des asperges. Or, de tels
critères revêtent une importance économique de plus en plus grande.
Il a donc également été proposé dans l'état de la technique des systèmes
pour le calibrage automatique des asperges incluant des moyens d'amenée et
d'individualisation de celles-ci, un dispositif de reconnaissance optique de chaque
asperge provenant des moyens d'amenée et un dispositif de convoyage et de tri des
asperges en fonction d'au moins un critère de tri évalué par le dispositif de
reconnaissance optique.
Selon un tel système, les asperges sont acheminées dans des godets
longitudinaux et le dispositif de reconnaissance optique inclut des moyens de prises
de vue de ces asperges dans ces godets. Un tel système présente toutefois,
l'inconvénient d'impliquer une mauvaise évaluation des critères de tri par le
dispositif de reconnaissance optique lié à la présence éventuelle dans les godets,
outre des asperges, d'éléments formant artefact tel que de l'eau, ou des déchets
provenant de l'opération de coupe des asperges.
L'objectif principal de la présente invention est de résoudre ce problème et
notamment de proposer un système pour le calibrage automatique des légumes
présentant une forme essentiellement allongée tels que les asperges permettant
d'optimiser le fonctionnement du dispositif de reconnaissance optique et ainsi
d'améliorer la qualité du calibrage.
Un autre objectif de la présente invention est de proposer un tel système qui
puisse être mise en oeuvre à des cadences élevées tout en impliquant l'utilisation
d'un nombre de critère de tri important.
Encore une autre objectif de la présente invention est de décrire un tel
système présentant de nouveaux moyens mécaniques permettant de trier rapidement
les légumes visualisés par le dispositif de reconnaissance optique.
Ces différents objectifs ainsi que d'autres qui apparaítront par la suite sont
atteints grâce à l'invention qui concerne un système pour le calibrage automatique
de légumes présentant une forme essentiellement allongée tels que les asperges,
incluant :
- des moyens d'amenée et d'individualisation desdits légumes ;
- au moins un dispositif de reconnaissance optique de chaque légume provenant
desdits moyens d'amenée ;
- au moins un dispositif de convoyage et de tri desdits légumes provenant desdits
moyens d'amenée permettant de trier ceux-ci et de le distribuer vers des moyens de
récupération en fonction d'au moins un critère de tri évalué par ledit dispositif de
reconnaissance optique,
ledit dispositif de reconnaissance optique incluant des moyens de prise de vue de
chaque légume positionnés au dessus dudit dispositif de convoyage et de tri,
ledit système étant d'une part caractérisé en ce que ledit dispositif de convoyage et
de tri comprend :
- une pluralité de modules accueillant lesdits légumes à leur sortie desdits moyens
d'amenée et incluant chacun au moins deux arceaux conçus pour pouvoir porter un
légume essentiellement en l'absence de tout autre élément,
- des moyens d'ouverture d'au moins un desdits arceaux permettant de libérer le
légume porté par ledit module et de le distribuer vers lesdits moyens de
récupération, lesdits moyens d'ouverture étant commandés par des moyens
d'actionnement mis en oeuvre en fonction de l'évaluation dudit critère de tri
effectuée grâce audit dispositif de reconnaissance optique.
Grâce aux moyens préconisés par l'invention, il est ainsi possible de
s'affranchir du problème posé par le système de calibrage d'asperges à dispositif de
reconnaissance optique de l'état de la technique. En effet, selon l'invention, les
asperges ne sont pas contenus dans des godets au moment de leur reconnaissance
optique mais sont soutenus par un système à arceaux permettant de supprimer tout
risque de présence d'autres éléments que les asperges, notamment d'eau, au
moment de cette opération. Les modules du dispositif de convoyage et de tri
proposés par l'invention incluant des arceaux conçus pour supporter les asperges,
aucun autre élément que celles-ci ne peut être retenu au moment de la visualisation.
On notera à ce sujet que ces modules pourront comprendre deux ou
plusieurs arceaux. Toutefois dans un mode de réalisation préférentiel de l'invention
ils ne présenteront chacun que deux arceaux, à savoir une arceau fixe ne s'ouvrant
pas et, un arceau monté mobile pouvant s'ouvrir afin de libérer l'asperge et la
distribuer vers les moyens de récupération du système de calibrage en fonction de
l'évaluation des critères de tri effectuée par le dispositif de reconnaissance optique.
L'utilisation d'un seul arceau susceptible de s'ouvrir permettra à l'asperge
de tomber délicatement sur lesdits moyens de récupération et ainsi de ne pas subir
de chocs susceptibles de l'abímer à ce stade du traitement.
Selon une autre variante intéressante de l'invention lesdits moyens
d'ouverture dudit arceau de chaque module incluent un axe rotatif coudé dont les
extrémités formant came peuvent coulisser dans une glissière latérale supérieure et
dans une glissière latérale inférieure, lesdites glissières latérales étant pourvues
d'organes de mise en rotation desdits axes rotatifs permettant de faire passe lesdites
extrémités de la glissière supérieure dans la glissèrere inférieure.
On pourra envisager différents modes de réalisation de tels organes
permettant de mettre en rotation des axes rotatifs des modules pour organiser la
distribution des asperges vers les moyens de récupération adéquats. Toutefois,
selon une variante préférentielle de l'invention, lesdits organes de mise en rotation
desdits axes rotatifs comprennent des gâches prévues sur lesdites glissières et
susceptibles d'être actionnés pour permettre l'abaissement momentané des
extrémités des axes rotatifs coulissants dans lesdites glissières.
Selon une variante ces organes de rotation sont préférentiellement actionnés
par des électro-aimants. Selon un autre mode de réalisation ils pourront être
actionnés également par des micro-vérins.
Comme cité ci-dessus, dans un mode de réalisation préférentiel de
l'invention, un seul des deux arceaux de chaque module est conçu pour s'ouvrir de
façon à permettre la dépose en douceur des asperges vers les moyens de
récupération. Dans un mode de réalisation avantageux de l'invention, chacun des
modules présente donc un axe fixe creux auquel est relié l'arceau fixe, l'axe rotatif
étant monté mobile à l'intérieur de cet axe fixe.
Avantageusement le dispositif de reconnaissance optique sera conçu pour
permettre l'évaluation de plusieurs critères de tri choisis dans le groupe constitué
par le diamètre, la couleur, la forme, la présence de tâches.
On pourra envisager la récupération des asperges provenant des modules
grâce à différents moyens, par exemple des toboggans. Toutefois,
préférentiellement ces moyens de récupération incluent des tapis roulants.
L'invention, ainsi que les différents avantages qu'elle présente seront plus
facilement compris grâce à la description qui va suivre d'un mode non limitatif de
réalisation de celle-ci en référence aux dessins dans lesquels :
- la figure 1 représente une vue schématique d'un mode de réalisation
du système de calibrage automatique d'asperges selon l'invention ;
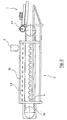
- la figure 2 représente une vue schématique latérale du système
représenté à la figure 1 ;
- la figure 2 représente une vue en perspective de deux modules du
dispositif de tri et de convoyage du système montré aux figures 1 et 2.
En référence à la figure 1 et à la figure 2, le système de calibrage selon
l'invention comprend des moyens 1 d'amenée et d'individualisation des asperges,
un dispositif de reconnaissance optique 2 de chaque asperge provenant desdits
moyens d'amenée 1 et un dispositif de convoyage et de tri 3 des aspergees
provenant des moyens d'amenée 1 permettant de trier celle-ci et de le distribuer
vers des moyens de récupération 4 en fonction des quatre critères de tri évalués par
ledit dispositif de reconnaissance optique 2 (diamètre, couleur, forme).
Plus précisément, les moyens d'amenée et d'individualisation (partiellement
représentés sur la figure 1) sont constitués essentiellement par un tapis à tasseaux
la dont le mouvement est commandé par un dispositif motoréducteur 1b, l'espace
entre deux tasseaux consécutifs étant conçu pour recevoir une et une seule asperge.
De tels moyens d'amenée sont précédés d'un convoyeur de chargement à double
bande à tasseaux de facture classique (non représenté sur la figure 1) sur lesquels
les asperges préalablement lavées et coupées sont placées.
Le dispositif de convoyage et de tri 3 comprend quant à lui une chaíne de
calibrage 3a (non visible sur la figure 1 mais visible sur la figure 2), supportant une
pluralité de modules 6 qui seront décrits ci-après plus en détails, et dont le
mouvement est commandé par un motoréducteur 3b. Comme on le comprendra
facilement, la vitesse du tapis à tasseaux la des moyens d'amenée 1 et celle de la
chaíne de calibrage 3a sont synchronisées grâce à un dispositif de synchronisation
15. Le dispositif de tri et de convoyage 3 comprend par ailleurs des moyens de
récupération des asperges triées par ce dispositif incluant treize tapis roulants
d'éjection 4 prévus sous la châine de calibrage 3a. On notera que ce dispositif est
également pourvu d'une roue 17 permettant de maintenir les asperges provenant du
tapis à tasseaux la lors de leur transfert dans les modules 6.
Enfin, le dispositif de reconnaissance optique 2 des asperges comprend une
caméra 5 placée au dessus du dispositif de tri 3 permettant d'effectuer des prises de
vue de toutes les asperges arrivant au niveau de ce dispositif, ainsi qu'une unité
centrale 16 analysant les données relevées par ladite caméra et relié au dispositif de
tri 3.
En référence à la figure 3, la chaíne de calibrage 3a du dispositif 3 supporte
une pluralité de modules 6 (deux seulement sont représentés sur la figure 3)
destinés à accueillir chacun une asperge. Ces modules 6 présentent chacun :
- un arceau fixe 7 monté sur un axe fixe creux 13 ;
- un arceau 8, consitué de deux doigts 8a, 8b dont un est fixé à un axe 9 monté
mobile à l'intérieur de l'axe fixe creux 13.
Les axes 9 présentent tous une extrémité coudée 10 formant came.
Toujours en référence à la figure 3, le dispositif de convoyage et de tri 3
comprend une paroi latérale 3c pourvue d'une glissière supérieure 11 et d'une
glissière inférieure 1 la, dans lesquelles peuvent coulisser les extrémités coudées 10
formant came des modules 6. Cette paroi est par ailleurs pourvue de passages 11c
plaçant en communication la glissière supérieure 11 et la glissière inférieure 11a et
d'une pluralité de gâches 12 permettant de faire passer l'extrémité de l'axe fixe 13
de la glissière supérieure 11 à la glissière inférieure 11a par le passage 11c, ce
mouvement provoquant la rotation de cet axe 13 et l'ouverture de l'arceau 8 par
séparation du doigt 8b du doigt 8a. Ces gâches 12 sont actionnées par des électro-aimants
14 (visibles sur la figure 2) commandés par l'unité centrale 16 du dispositif
de reconnaissance optique 2.
Le fonctionnement du système représenté est le suivant.
Les asperges sont acheminées après avoir été préalablement lavées et
coupées par le tapis à tasseaux la et sont transférées une par une dans les modules 6
du dispositif de tri 3 défilant à vitesse rapide, constante et synchrone avec celle du
tapis à tasseaux la. Afin de faciliter ce transfert, la roue 17 maintient les asperges
lors de celui-ci. Lors de ce transfert, l'extrémité 10 du module recevant l'asperge
est maintenue dans la glissière supérieure 11 de la paroi latérale 3a du dispositif 3
correspondant à une position fermée de l'arceau 8.
Chaque asperge est ensuite visualisée par la caméra 5 du dispositif de
reconnaissance optique 2. Les données optiques relatives à chaque asperge sont
communiquées à l'unité centrale 16 qui évalue chacun des critères de tri de ladite
asperge (diamètre, couleur, forme) et attribue à celle-ci l'une des treize sorties du
dispositif de tri 3 correspondant à l'un des treize tapis roulants d'éjection 4.
Grâce à la structure à arceaux des modules 6 selon l'invention, la
visualisation des asperges est optimisée car aucun autre élément que l'asperge (eau,
détritus divers...) ne peut être maintenu dans le module.
La distribution de chaque asperge contenue dans chaque module 6 vers le
tapis d'éjection 4 attribué par l'unité centrale 16 est effectuée en ouvrant l'arceau 8
de ce module au-dessus de ce tapis. Cette ouverture est provoquée par
l'actionnement de la gâche 12 correspondant audit tapis, provoquant le passage de
l'extrémité coudée formant came 10 de l'axe 9 du module 6 de la glissière
supérieure 11 vers la glissière inférieure 11a, passage entrainant en rotation l'axe 9
et l'éloignement du doigt 8b du doigt 8a. L'actionnement de la gâche 12 est
provoquée grâce à l'électro-aimant correspondant 14. L'arceau 7 étant fixe et ne
s'ouvrant pas, l'asperge est déposée délicatement sur le tapis 4 qui lui a été attribué.
Une fois l'asperge distribuée sur le bon tapis, l'arceau 8 est refermé en bout de
châine de calibrage.
Le système ici décrit permet ainsi de trier rapidement les asperges en
fonction de leur couleur, de leur forme et de leur diamètre et permet d'obtenir
jusqu'à treize lots d'asperges triées en fonction de ces critères de tri, l'un des tapis
étant dévolu à la récupération des asperges non commercialisables.
Un tel système permet d'augmenter le degré de fiabilité du tri effectué tout
en autorisant des cadences de traitement très élevées.
Le présent exemple de réalisation de l'invention ici décrit n'a pas pour objet
de réduire la portée de celle-ci. En conséquence, il pourra lui être apporté de
nombreuses modifications sans sortir du cadre de l'invention. En particulier, on
notera que la forme et le nombre des arceaux pourront être différents de ceux décrits
et que les moyens mis en oeuvre pour organiser l'ouverture des arceaux pourront
également être différents.