EP0860362A2 - Vorrichtung zum Überführen von Beuteln zwischen einer Füllstation und einem Förderer - Google Patents
Vorrichtung zum Überführen von Beuteln zwischen einer Füllstation und einem Förderer Download PDFInfo
- Publication number
- EP0860362A2 EP0860362A2 EP97830496A EP97830496A EP0860362A2 EP 0860362 A2 EP0860362 A2 EP 0860362A2 EP 97830496 A EP97830496 A EP 97830496A EP 97830496 A EP97830496 A EP 97830496A EP 0860362 A2 EP0860362 A2 EP 0860362A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- grippers
- bag
- unit
- rotating shaft
- conveyor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/46—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers
- B65B43/465—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers for bags
Definitions
- the present invention relates to a device for transferring bags from a filling station to a conveyor.
- the invention is particularly, but not exclusively, suitable for application in a continuous installation for filling and packaging flexible bags containing granular or powdery material.
- the empty bags are supplied to a working station in which they are filled with powdery or granular material, usually supplied by means of a hopper.
- the filling station is equipped with a device for handling empty bags, which removes the bags one at a time and places them in position below the hopper for filling.
- the packaging installation furthermore comprises a transfer device, arranged in series, which transports the full bags to a linear conveyor, in general of the belt type, which is capable of transferring the bags to the downstream working stations of the installation.
- Another drawback is that of synchronizing the controls of the various devices operating in the filling station, such as the device which positions the empty bags below the hopper and the device which transfers the full bags to the conveyor for the subsequent operating steps (stitching or sealing).
- the aim of the present invention is to overcome the abovementioned drawbacks of the known art by providing a device of simple and economical design which has relatively relatively small dimensions.
- One advantage of the present invention consists in the fact that the motor which operates the device can be used for actuating another device located upstream of the filling station, in particular the device intended for placing the empty bags in the filling position.
- Another advantage of the present invention is that it allows very secure and reliable gripping of the bags during their transfer from the filling station to the conveyor.
- a further advantage of the present invention consists in the possibility of being simply and directly adaptable to bags of different sizes.
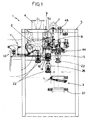
- the filling station 2 which is of the known type, comprises a hopper 4 for discharging the filling material (powdery or granular material).
- Appropriate metering means of the known type and not shown, are provided for operating and controlling the operation involving filling of each bag.
- the conveyor 3 is of the belt type and may be used for transporting the bags to a downstream working station in which the bags are closed, for example by stitching or heat-sealing.
- the device 1 in question comprises a frame 5 on which there is mounted a motor 6 which, via a cam member 7, causes a first toothed pulley 8 to perform an oscillating movement.
- a connecting rod 53 connects the cam member 7 to the first pulley 8.
- the first pulley 8 is keyed onto one end of a first shaft 9 with a horizontal axis rotatably coupled to a support 10 integral with the frame 5.
- the first pulley 8 is operated so as to perform oscillations with an amplitude of 90°.
- a system of articulated rods, indicated in its entirety at 11, which receives the abovementioned oscillating movement with an amplitude of 90° from the first shaft 9 is connected to the end of the first shaft 9, opposite to the one carrying the first pulley 8.
- This rod system 11 operates a device 12 intended for positioning the bags, coming from a known supply line, not shown, in the filling station 2.
- a single motor the motor 6, in this case
- the positioning device 12 constitutes a utility outside the transfer device 1 in question. It is possible to use the movement of the first shaft 9 for actuating other types of utilities outside the transfer device 1. Since a single motor is used for operating several devices having various functions, it is not necessary to provide means for synchronizing several independent driving operations.
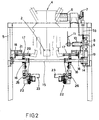
- the first toothed pulley 8 is connected, by means of a toothed belt drive 13, to a second toothed pulley 14 having a diameter equal to half the diameter of the first pulley 8.
- the second pulley 14 is therefore operated by the first pulley 8 so as to perform oscillations having an amplitude of 180°.
- the second pulley 14 is keyed onto one end of a second shaft 15 rotatably coupled, via suitable bearings, to two first toothed wheels 16.
- Each first toothed wheel 16 is fixed at the top to a respective screw-type device 17 for adjusting the position, which can be operated by means of a handwheel 18.
- This positioning device 17 comprises a sliding piece 19 integral with the first toothed wheel 16 and coupled to an endless screw 20, with a horizontal rotating axis, which is pivotably mounted at its opposite ends on a support 21 secured to the frame 5.
- the axis of rotation of the second shaft 15 is also horizontal.
- the first toothed wheel 16 is coaxial with the second shaft 15.
- Each first toothed wheel 16 has associated with it a movable unit 22 carrying a pair of grippers 23 which are designed to grip the top edge of a bag and capable of selectively adopting, upon actuation, a closed position ( Figures 5 and 3) where they can grip the bag and an open position ( Figure 4) where they release the bag.
- Each gripper carrying unit 22 is equipped with a support 24 integrally secured to the second shaft 15. This support 24 is driven by the second shaft 15 so as to perform oscillations of 180°.
- Each pair of grippers 23 is mounted on the respective gripper carrying unit 22 such that, as a result of a rotation of the second shaft 15, the grippers 23 are made to perform a pure translational movement while staying parallel with one another.
- the connection between a pair of grippers 23 and the second shaft 15, which allows this translational movement to be obtained, is described.
- the comments made in respect of one pair of grippers 23 also apply to the other pair of grippers 23.
- the two pairs of grippers 23 are symmetrical with one another relative to a vertical plane. In other embodiments of the invention, it is possible to provide other types of connections by means of which the grippers can move parallel with one another.
- a third shaft 25 is rotatably coupled, with a horizontal axis of rotation, to one end of the support 24 integral with the second shaft 15.
- a second toothed wheel 26 connected to the first toothed wheel 16 by means of a toothed belt 27 is mounted coaxially and integrally on a first end of the third shaft.
- the diameters of the first and second toothed wheels are identical.
- a sleeve 28 capable of axially sliding on the third shaft 25 is rotatably mounted on a second end of the third shaft 25 opposite to the first one. At the bottom, the sleeve 28 carries a vertical plate 29.
- a first cylinder 30 is connected on the base side to the plate 29 and on the rod side to the second toothed wheel 26.
- This first cylinder 30 with a horizontal axis has the function of moving the grippers 23 slightly in a horizontal direction in order to keep the gripped bag taut, as will be explained in more detail below.
- Two rotating pivots 31 with a vertical axis spaced from one another are integrally connected to the plate 29.
- a respective gripper 23 is rotatably coupled to each rotating pivot 31. In the closed position ( Figure 5), the grippers 23 have at the ends two respective planar gripping surfaces 32 facing each other, between which an edge portion of the bag to be transferred is gripped.
- the operation of opening and closing of the grippers 23 is effected by a second cylinder 33 mounted on the plate 29 and having a horizontal axis.
- the second cylinder 33 causes a to-and-fro movement of a cam member 34 operationally associated with both grippers 23 and equipped with a profiled track 35.
- Each gripper 23 has at one end a guided member, in the form of a cylindrical roller, which engages with the inside of the profiled track 35.
- Each guided member 36 is located at the end of the gripper opposite to the end comprising the abovementioned gripping surface 32.
- the guided member 36 is forced to run along the profiled track 35.
- the grippers 23 are guided by the profiled track so as to open and, vice versa, during the return movement they are guided so as to close.
- the guided members 36 of each gripper are located in the respective end sections of the profiled track 35 ( Figure 5).
- the profiled track 35 has active surfaces in the form of a plane inclined at such an angle that the gripping force with which a bag is held between the grippers is notably increased.
- cam member 34 (clearly seen in Figure 5) has the effect that the thrust acting on the guided member 36 (and thus on the grippers 23) is increased when the grippers are located in the vicinity of their closed position. In this way, the force with which the grippers 23 grip the bag is fairly high and, consequently, the grip is secure.
- the movement of the gripper carrying unit 22 is shown in Figure 1. This movement essentially consists in a rotation of 180° during which the grippers 23 and the bag transported by them always remain parallel with respect to one another.
- the grippers 23 transport the bag to a conveyor which forms part of the transfer device 1 in question and will be described below.
- the conveyor has a first mobile conveyor belt 37 fixed to the connecting rod 38 of a four-bar linkage 39 mounted on the lower portion of the frame 5.
- the connecting rod 38 is capable of performing a pure translational movement parallel with respect to itself along a vertical plane.
- a cylinder 40 is hinged to the frame 5 on the rod side and is secured to the first conveyor belt 37 on the base side. By means of the cylinder 40 it is possible to move perform an upward and downward movement of the first conveyor belt 37, as can be seen in Figure 6.
- the first mobile conveyor belt 37 is coupled in series to a second fixed conveyor belt 42.
- a motor 42 causes travel of both the first and the second conveyor belt. This constitutes an advantage compared to the known art in that both the fixed conveyor and the mobile one can be operated by a single motor.
- the vertical position of the two conveyors 37 and 41 can be regulated by means of a lever 54 which causes rotation of a toothed wheel 55 meshing with a fixed rack 56.
- 43 denotes walls for lateral confinement of the bags to be transported.
- the conveyor of the bags has a belt-type gripping member 44 which is capable of picking up the top edge portion of a bag carried by the abovementioned grippers 23 and transporting the bag itself.
- the gripping member 44 comprises two jaws 45 which interact with one another and are hinged at an upper end with the possibility of rotation about a horizontal axis.
- the jaws 45 can, upon actuation, selectively adopt at least one open position and one closed position.
- the bottom end of the jaws 45 has a gripping surface designed for contact with the bags and consisting, in the case in question, of two endless belts 46 wound on toothed rollers 47.
- the gripping member 44 is positionable heightwise by means of a positioning device 48 composed of three endless-screw translating means 49 which have a horizontal axis and are mounted on the frame 5 and to which the gripping member 44 is attached.
- the top end of each translating means comprises a wheel 50; the three wheels 50, which have the same diameter, are connected to one another by means of a common belt 51 so that it is sufficient to have a single speed reducer 52 for actuating the three translating means 49 simultaneously.
- the two pairs of grippers 23 grip two opposite edge portions of the bag, after which the system, which during filling held the bag, releases its grip.
- the upper edge portion of the bag gripped by the pliers is tensioned by means of the movement, away from one another, of the two pairs of holding grippers 23.
- This operation is effected by means of actuation of the first cylinders 30 which allow the grippers 23 to perform small adjusting movements in a horizontal direction with respect to the gripper carrying unit 22, these movements also being facilitated by the fact that the plate 29 carrying the grippers 23 can move axially along the third shaft 25.
- the gripper carrying unit 22 is then made to rotate through 180° so as to move from the filling station 2 to a position where it is located above the first conveyor belt 37.
- the rotation is effected by actuating the main motor 6 which is connected to the gripper carrying unit 22 by means of a transmission system which transforms the continuous rotation of the shaft of motor 6 into an alternating rotation, with an amplitude of 180°, of the second shaft 15.
- the grippers 23, as mentioned move while remaining parallel with one another, so that the upper opening of the bag remains horizontal and there is no risk of any product falling out of the bag itself.
- the first conveyor belt 37 is in a lowered position so as not to hinder the movement of the bag.
- the first conveyor belt 37 is brought into the upper position where it is aligned with the second conveyor belt 41.
- the two travelling belts 46 of the upper gripping member 44 are closed above the top edge of the bag.
- the grippers 23 can then open and thus release their grip on the bag, which is transported to downstream working stations, such as, for example, a station for closing the inlet opening of the bag by heat-sealing or stitching.
- the gripper carrying unit 22 can return to the filling station 2 for the next working cycle.
- the gripper carrying unit 22 is thus capable of carrying out an alternating oscillating movement during which it may selectively adopt a gripping position in which the grippers 23 can grip a bag located in the filling station 2 and a release position in which the grippers 23 can release the bag onto the conveyor 3.
- the grippers 23 remain parallel with one another owing to the fact that the grippers themselves are integral, during rotation, with the second wheel 26 rotatably mounted on the gripper carrying unit 22, the said second wheel 26 being attached to the first wheel 16, which is fixed and coaxial with the second rotating shaft 26, so that a rotation of the gripper carrying unit 22 causes an identical rotation, in the opposite sense, of the second wheel 26 and hence the grippers 23.
- the second wheel 26 is forced to rotate owing to the fact that it is connected, via the toothed belt 27, to the first wheel 16 which is secured to the frame 5.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Supplying Of Containers To The Packaging Station (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITPR970007 | 1997-02-19 | ||
| IT97PR000007 IT1294073B1 (it) | 1997-02-19 | 1997-02-19 | Dispositivo per trasferire sacchi da una stazione di riempimento ad un trasportatore. |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0860362A2 true EP0860362A2 (de) | 1998-08-26 |
| EP0860362A3 EP0860362A3 (de) | 1998-11-18 |
| EP0860362B1 EP0860362B1 (de) | 2002-01-09 |
Family
ID=11396058
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19970830496 Expired - Lifetime EP0860362B1 (de) | 1997-02-19 | 1997-10-03 | Vorrichtung zum Überführen von Beuteln zwischen einer Füllstation und einem Förderer |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0860362B1 (de) |
| DE (1) | DE69709537D1 (de) |
| IT (1) | IT1294073B1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1249400A3 (de) * | 2001-04-13 | 2003-01-29 | Toyo Jidoki Co., Ltd. | Vorrichtung zum Zuführen von leeren Beuteln und Vorrichtung zum Abführen von gefüllten Beuteln in einer kontinuierlichen Beutelfüllmaschine |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPS061402A0 (en) | 2002-02-19 | 2002-03-14 | Tna Australia Pty Limited | A device to aid packaging items |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL296527A (de) * | 1962-08-13 | |||
| US3232446A (en) * | 1962-12-17 | 1966-02-01 | Monsanto Co | Article transfer mechanism |
| DK0468376T3 (da) * | 1990-07-25 | 1995-04-24 | Bl Macchine Automatiche | Automatisk sækfyldningsmaskine |
-
1997
- 1997-02-19 IT IT97PR000007 patent/IT1294073B1/it active IP Right Grant
- 1997-10-03 EP EP19970830496 patent/EP0860362B1/de not_active Expired - Lifetime
- 1997-10-03 DE DE69709537T patent/DE69709537D1/de not_active Expired - Lifetime
Non-Patent Citations (1)
| Title |
|---|
| None |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1249400A3 (de) * | 2001-04-13 | 2003-01-29 | Toyo Jidoki Co., Ltd. | Vorrichtung zum Zuführen von leeren Beuteln und Vorrichtung zum Abführen von gefüllten Beuteln in einer kontinuierlichen Beutelfüllmaschine |
| US6712196B2 (en) | 2001-04-13 | 2004-03-30 | Toyo Jidoki Co., Ltd. | Empty bag supplying apparatus and a product-filled bag extraction apparatus in a continuous conveying type bag-filling packaging machine |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0860362A3 (de) | 1998-11-18 |
| EP0860362B1 (de) | 2002-01-09 |
| IT1294073B1 (it) | 1999-03-22 |
| ITPR970007A1 (it) | 1998-08-19 |
| DE69709537D1 (de) | 2002-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2262276C (en) | Bag filling apparatus and method | |
| US4078358A (en) | Bag-hanging and bag-filling machines adapted for synchronous and independent operation and method of using same | |
| US8720667B2 (en) | Product bag unloading apparatus | |
| US6725635B2 (en) | Feed arrangement for pouches in continuous motion pouching machinery | |
| JP3917307B2 (ja) | 特に、ソフトフィルムパックを処理する装置 | |
| US6712196B2 (en) | Empty bag supplying apparatus and a product-filled bag extraction apparatus in a continuous conveying type bag-filling packaging machine | |
| EP2402270B1 (de) | Vorrichtung zum Entladen von Duplex-Produktbeuteln | |
| US5054275A (en) | Apparatus for supplying valved sacks to a filling nozzle | |
| EP0860362B1 (de) | Vorrichtung zum Überführen von Beuteln zwischen einer Füllstation und einem Förderer | |
| KR102161713B1 (ko) | 다관절 암을 갖는 식품 자동 포장 장치 | |
| US5452567A (en) | Dual bag filling apparatus | |
| EP0605740A1 (de) | Fördersystem für gegenstände | |
| JP2002154641A (ja) | 搬送物の反転装置 | |
| JP4555767B2 (ja) | ファスナー付き包袋の供給方法及びその装置 | |
| KR102317687B1 (ko) | 다관절 이송암을 갖는 식품 자동 포장 장치 | |
| JP4229801B2 (ja) | 容器搬送装置 | |
| KR20050005445A (ko) | 저장고에 쌓인 부대를 수용, 분리, 개봉하기 위한 장치 | |
| JP3799525B2 (ja) | 搬送物品の姿勢転換装置 | |
| JP2898442B2 (ja) | 自動包装機の袋供給装置 | |
| JP4294186B2 (ja) | 物品移載装置 | |
| IE45324B1 (en) | Bag-filling machine | |
| WO2005028343A1 (en) | Conveyor device and method for transporting and/or sorting, especially food | |
| JPH0872824A (ja) | 袋詰め包装機における袋搬送装置 | |
| JPH01279012A (ja) | 包装機における搬出装置 | |
| JPH0872825A (ja) | 袋詰め包装機における袋保持搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): BE DE DK FI FR GB IT NL SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19990504 |
|
| AKX | Designation fees paid |
Free format text: BE DE DK FI FR GB IT NL SE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: CHRONOS HOLDING LTD |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| 17Q | First examination report despatched |
Effective date: 20010412 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE DE DK FI FR GB IT NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020109 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRE;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED.SCRIBED TIME-LIMIT Effective date: 20020109 Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020109 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020109 Ref country code: BE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020109 |
|
| REF | Corresponds to: |
Ref document number: 69709537 Country of ref document: DE Date of ref document: 20020214 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020409 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20020410 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| EN | Fr: translation not filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20021031 Year of fee payment: 6 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20031003 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20031003 |