EP0216645A2 - Dispositif anti-inversion du mouvement relatif de deux organes respectivement mâle et femelle, dont l'un est actionné manuellement - Google Patents
Dispositif anti-inversion du mouvement relatif de deux organes respectivement mâle et femelle, dont l'un est actionné manuellement Download PDFInfo
- Publication number
- EP0216645A2 EP0216645A2 EP86401594A EP86401594A EP0216645A2 EP 0216645 A2 EP0216645 A2 EP 0216645A2 EP 86401594 A EP86401594 A EP 86401594A EP 86401594 A EP86401594 A EP 86401594A EP 0216645 A2 EP0216645 A2 EP 0216645A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- finger
- relative movement
- members
- movement
- male
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01R—ELECTRICALLY-CONDUCTIVE CONNECTIONS; STRUCTURAL ASSOCIATIONS OF A PLURALITY OF MUTUALLY-INSULATED ELECTRICAL CONNECTING ELEMENTS; COUPLING DEVICES; CURRENT COLLECTORS
- H01R13/00—Details of coupling devices of the kinds covered by groups H01R12/70 or H01R24/00 - H01R33/00
- H01R13/62—Means for facilitating engagement or disengagement of coupling parts or for holding them in engagement
- H01R13/623—Casing or ring with helicoidal groove
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G7/00—Manually-actuated control mechanisms provided with one single controlling member co-operating with one single controlled member; Details thereof
- G05G7/02—Manually-actuated control mechanisms provided with one single controlling member co-operating with one single controlled member; Details thereof characterised by special provisions for conveying or converting motion, or for acting at a distance
- G05G7/08—Manually-actuated control mechanisms provided with one single controlling member co-operating with one single controlled member; Details thereof characterised by special provisions for conveying or converting motion, or for acting at a distance in which repeated movement of the controlling member moves the controlling member through a cycle of distinct positions
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49117—Conductor or circuit manufacturing
- Y10T29/49194—Assembling elongated conductors, e.g., splicing, etc.
- Y10T29/49195—Assembling elongated conductors, e.g., splicing, etc. with end-to-end orienting
Definitions
- the invention relates to any system in which one of two members fitted one inside the other is moved manually relative to the other, along a trajectory traveled in one direction, then in the opposite direction.
- the invention provides a device consisting on the one hand, by a finger mounted in a support secured to one of the members, movable in a plane perpendicular to the general direction of relative movement and subjected to the action of an elastic means urging it towards an average position of rest and, on the other hand, by a ramp for guiding said finger, provided on the second member, having a general direction substantially parallel to that of relative movement and having at a point, a stop surface substantially perpendicular to the relative movement and opposite which the finger is placed when the stroke reaches the position from which the reversal of the direction of operation must be prohibited.
- the finger is constituted by a metal rod which passes through a diametrical slot at the bottom of a cylindrical case and which is provided with a flat head applying, at rest, against the inside face of the cover of the case, while that a conical coil spring is interposed between said flat head and the inner face of the bottom of the housing.
- the device according to the invention comprises a movable finger cooperating with a ramp.
- the finger 11 is carried by the female member, symbolized by the housing 10 of said finger, and the ramp by the male member, but, of course, it could be the reverse.
- the coupling of the male organ 12 and of the female member 10 comprises a final phase which is a rotational movement around the axis X of said male member.
- the finger 11 is movable in a plane P passing through the axis X, that is to say in a plane perpendicular to the general direction of the relative movement of the male organ 12 relative to the female organ 10.
- the organ male 12 carries a projection 13 forming a double ramp, intended to cooperate with and guide the movable finger 11.
- the projection 13 has the general shape of a curvilinear rhombus whose ends of the long diagonal 13 c delimit two half-perimeters 13a and 13 b followed by finger 11 respectively in the stroke in a direction F 1 and in the reverse stroke F 2 .
- a notch 14 in the form of a wolf tooth has an abrupt face whose plane is substantially parallel to the axis X and therefore substantially perpendicular to the direction F 2 of the relative movement of the two organs.
- the mounting of the finger 11 in its housing 10 is clearly shown in Figures 3 and 4.
- the finger consists of a metal rod which passes through a diametrical slot 15 of the bottom 16 of the cylindrical housing 10 and which is provided with a flat head 17 applying at rest against the inner face of the cover 18 of the housing.
- a conical coil spring 19 is interposed between said flat head 17 and the inner face of the bottom 16 of the housing. It can be seen that the finger can oscillate in the diametrical plane P of the housing 10 corresponding to the slot 15 by deforming the spring 19 and that the latter tends to bring the finger back into coincidence with the axis Z of the housing 10.
- the operation of the device is as follows.
- the male member 12 being fitted into the female member (symbolized by 10), the coupling takes place by imparting to the member 12 a rotational movement F 1 .
- the finger 11 is opposite a point of the half-perimeter 13a of the projection 13 (FIG. 1A).
- the finger is pushed back by the ramp opposite the member 12 and slides on the projection 13 by traversing the half-perimeter 13a (FIGS. 1B and 1).
- the finger 11 At the end of the coupling, the finger 11 is at the end of the large diagonal of the projection ( Figure 1 D ) or a little beyond and, under the action of the spring 19, returns to its initial axial position opposite a point of the half-perimeter 13 b .
- the male organ is given a reverse rotation F 2 of F 1
- the finger 11 comes into contact with the half-perimeter 13 b and slides on the latter whose curvature pushes it back towards reverse of nesting ( Figure 1 E ).
- the notch 14 in the form of a wolf tooth is formed, the abrupt face of which constitutes a stop surface substantially parallel to the axis X and, under the action of the spring 19, the finger 11 is housed in this hook (FIG. 1 F ) preventing any rotation F 1 . While continuing the rotation F 2 , the finger 11 traverses the entire half-perimeter 13 b until it escapes to return to the initial position of FIG. 1 A.
- the notch 14 could be provided on the half-perimeter 13 a to prohibit the reversal of the rotation along F 1 , or even that a notch may be formed on each of the half-areas 13a and 13b to prohibit the reversal of motion, both during the coupling stroke than during the separation stroke.
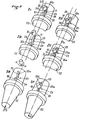
- FIGS. 2A to 2 Fl the coupling of the male member 22 and the female member 10 takes place at the end of a relative movement F 3 of axial translation.
- a movable finger 11 housed in a housing 10 symbolizing the female member, the finger being able to oscillate in the plane P perpendicular to F 3 .
- the guide ramp 23 carried by the male member 22 is constituted by two oblong parallelipipedic ribs 25 and 26.
- the rib 25 which cooperates first with the finger 11 during the coupling stroke F is slightly oblique with respect to the direction of the relative movement, while the rib 26 is parallel to this direction, the end faces closest to the two ribs being offset laterally and the spacing 24 between said ends being greater than the diameter of the finger 11.
- the finger 11 Before the two bodies fit together (FIG. 2A), the finger 11 is in its rest position, facing a point on the lateral face 25 of the rib 25.
- the obliquity of the rib 25 makes the movable finger deviates from the path of the rib 26, sliding on the face 25, when the translation of the member 22 continues (FIG. 2B ).
- the finger 11 arrives at the end of the rib 25 (FIG. 2 C ) then under the action of the spring 19 comes to bear against the face 26 a of the rib 26 (FIG. 2 D ) .
- the ramp with a notch in FIG. 1 can be adapted for an axial translational movement, as the two-part ramp in FIG. 2 can be adapted for a rotational movement.
- the device according to the invention finds a particularly interesting application for electrical outlets, in order to prohibit any attempt to re-engage, when the separation maneuver reaches the position corresponding to the cut-off. contacts ( Figures 1 F and 2 F ). It should then continue the operation until the end, to return to a position where the coupling becomes possible ( Figure 1. And 2 A).
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Details Of Connecting Devices For Male And Female Coupling (AREA)
- Surgical Instruments (AREA)
- Toys (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
Abstract
Description
- L'invention concerne tout système dans lequel l'un de deux organes emboîtés l'un dans l'autre, est déplacé manuellement par rapport à l'autre, selon une trajectoire parcourue dans un sens, puis en sens inverse.
- Il peut être utile, ou même nécessaire, voire indispensable, que l'un au moins des trajets, aller ou retour, ne puisse s'effectuer que si la course précédente inverse s'est poursuivie jusqu'au bout. Cette nécessité peut découler du fait qu'il faut réarmer un ressort ou faire fonctionner un compteur, mais le plus souvent, elle résulte de l'obligation de ramener au moins une pièce mobile dans une position qui lui permet, dans le trajet suivant, de jouer son rôle et d'éviter toute détérioration. C'est le cas rencontré, notamment, dans les prises de courant électrique décrites dans le FR-A-2531577 et son premier certificat d'addition (85 04198), ainsi que celle décrite dans la demande EP-A -106931, appartenant au même déposant, où un retour vers la position d'enclenchement de la fiche et du socle, lorsque la manoeuvre de séparation est en cours, entraînerait d'une part la détérioration des pièces basculantes portant les contacts mobiles et, d'autre part, pourrait déterminer la naissance d'un arc électrique entre lesdites pièces et les contacts fixes, ce qui serait particulièrement dangereux en milieu déflagrant. Mais il doit être entendu que l'invention peut s'appliquer à d'autres systèmes mécaniques ou électriques.
- Afin d'assurer une totale liberté au mouvement relatif de deux organes, respectivement mâle et femelle, dont l'un est actionné manuellement dans un premier sens, puis en sens opposé, tout en s'opposant à un retour en arrière, au cours de l'une au moins de ces deux courses, à partir d'un point déterminé du parcours, l'invention prévoit un dispositif constitué d'une part, par un doigt monté dans un support solidaire de l'un des organes, mobile dans un plan perpendiculaire à la direction générale du mouvement relatif et soumis à l'action d'un moyen élastique le sollicitant vers une position moyenne de repos et, d'autre part, par une rampe de guidage dudit doigt, prévue sur le second organe, ayant une direction générale sensiblement parallèle à celle du mouvement relatif et présentant en un point, une surface de butée sensiblement perpendiculaire au mouvement relatif et en regard de laquelle vient se placer le doigt au moment où la course atteint la position à partir de laquelle l'inversion du sens de manoeuvre doit être interdite.
- Avantageusement, le doigt est constitué par une tige métallique qui passe à travers une fente diamètrale du fond d'un boîtier cylindrique et qui est munie d'une tête plate s'appliquant, au repos, contre la face intérieure du couvercle du boîtier, tandis qu'un ressort à boudin conique est interposé entre ladite tête plate et la face intérieure du fond du boîtier.
- L'invention sera mieux comprise à la lecture de la description qui va suivre et qui se réfère aux dessins annexés dans lesquels:
- - la figure 1 représente six positions relatives successives (1 à 1F) des deux éléments, doigt et rampe, d'un dispositif selon l'invention lorsque la phase finale de l'accouplement des deux organes mâle et femelle est une rotation.
- - la figure 2 montre six positions relatives successives (2A à 2F) des deux éléments, doigt et rampe, d'un dispositif selon l'invention lorsque les deux organes mâle et femelle s'accouplent par translation axiale.
- - les figures 3 et 4, à plus grande échelle, sont, respectivement, une coupe diamétrale et une vue de dessous d'un doigt logé dans son boîtier.
- Comme il a été dit, le dispositif selon l'invention comporte un doigt mobile coopérant avec une rampe. Dans les modes de réalisation représentés, le doigt 11 est porté par l'organe femelle, symbolisé par le boîtier 10 dudit doigt, et la rampe par l'organe mâle, mais, bien entendu, ce pourrait être l'inverse.
- Aux figures 1. à 1p, l'accouplement de l'organe mâle 12 et de l'organe femelle 10 comporte une phase finale qui est un mouvement de rotation autour de l'axe X dudit organe mâle. Le doigt 11 est mobile dans un plan P passant par l'axe X, c'est à dire dans un plan perpendiculaire à la direction générale du mouvement relatif de l'organe mâle 12 par rapport à l'organe femelle 10. L'organe mâle 12 porte une saillie 13 formant une rampe double, destinée à coopérer avec et à guider le doigt mobile 11. La saillie 13 a la forme générale d'un losange curviligne dont les extrémités de la grande diagonale 13 c délimitent deux demi-périmètres 13a et 13b suivis par le doigt 11 respectivement dans la course dans un sens F1 et dans la course inverse F2. Sur le demi-périmètre 13b, suivi par le doigt lors de la course F2, une encoche 14 en forme de dent de loup présente une face abrupte dont le plan est sensiblement parallèle à l'axe X et donc sensiblement perpendiculaire à la direction F2 du mouvement relatif des deux organes.
- Le montage du doigt 11 dans son boitier 10 est clairement représenté aux figures 3 et 4. Le doigt est constitué par une tige métallique qui passe à travers une fente diamètrale 15 du fond 16 du boîtier cylindrique 10 et qui est munie d'une tête plate 17 s'appliquant au repos contre la face intérieure du couvercle 18 du boîtier. Un ressort à boudin conique 19 est interposé entre ladite tête plate 17 et la face intérieure du fond 16 du boîtier. On voit que le doigt peut osciller dans le plan diamétral P du boîtier 10 correspondant à la fente 15 en déformant le ressort 19 et que ce dernier tend à ramener le doigt en coïncidence avec l'axe Z du boîtier 10.
- Le fonctionnement du dispositif est le suivant. L'organe mâle 12 étant emboîté dans l'organe femelle (symbolisé par 10), l'accouplement s'effectue en imprimant à l'organe 12 un mouvement de rotation F1. A la fin de l'emboîtement, le doigt 11 est en regard d'un point du demi-périmètre 13a de la saillie 13 (figure 1A). Au cours de la rotation F1, le doigt est repoussé par la rampe à l'opposé de l'organe 12 et glisse sur la saillie 13 en parcourant le demi-périmètre 13a (figures 1B et 1 ). A la fin de l'accouplement, le doigt 11 se trouve à l'extrémité de la grande diagonale de la saillie (figure 1D) ou un peu au-delà et, sous l'action du ressort 19, revient à sa position initiale axiale en regard d'un point du demi-périmètre 13b. Lorsque pour séparer les deux organes mâle et femelle on imprime à l'organe mâle une rotation F2 inverse de F1, le doigt 11 vient en contact avec le demi-périmètre 13b et glisse sur ce dernier dont la courbure le repousse en direction inverse de l'emboîtement (figure 1E). Au point du demi-périmètre 13b correspondant à la position à partir de laquelle on veut interdire l'inversion du mouvement, est ménagée l'encoche 14 en forme de dent de loup dont la face abrupte constitue une surface de butée sensiblement parallèle à l'axe X et, sous l'action du ressort 19, le doigt 11 vient se loger dans ce crochet (figure 1F) interdisant toute rotation F1. En poursuivant la rotation F2, le doigt 11 parcourt tout le demi-périmètre 13b jusqu'à lui échapper pour revenir à la position initiale de la figure 1A.
- Dans cet exemple, seule la rotation selon F2 ne peut être inversée, mais il est clair que l'encoche 14 pourrait être prévue sur le demi-périmètre 13 a pour interdire l'inversion de la rotation selon F1, ou encore qu'une encoche peut être ménagée sur chacun des demi-périmètres 13a et 13b pour interdire l'inversion du mouvement, aussi bien au cours de la course d'accouplement qu'au cours de la course de séparation.
- Il faut encore remarquer que si dans l'exemple représenté, les rotations F1 et F2 s'effectuent sans déplacement axial, il n'y a aucune difficulté pour adapter cette structure à un déplacement hélicoidal de l'organe mâle 12 par rapport à l'organe femelle 10. Simplement, la diagonale 13 c de la saillie 13 s'étend alors selon une hélice et la position angulaire du boîtier 10 est modifiée pour que la fente 15 de son fond s'étende dans un plan perpendiculaire à ladite hélice.
- Aux figures 2A à 2Fl l'accouplement de l'organe mâle 22 et de l'organe femelle 10 s'effectue à la fin d'un mouvement relatif F3 de translation axiale. On retrouve, un doigt mobile 11 logé dans un boîtier 10 symbolisant l'organe femelle, le doigt pouvant osciller dans le plan P perpendiculaire à F3. Dans ce mode de réalisation, la rampe de guidage 23 portée par l'organe mâle 22 est constituée par deux nervures parallélipipédiques oblongues 25 et 26. La nervure 25 qui coopère la première avec le doigt 11 lors de la course d'accouplement F est légèrement oblique par rapport à la direction du mouvement relatif, tandis que la nervure 26 est parallèle à cette direction, les faces extrêmes les plus proches des deux nervures étant décalées latéralement et l'espacement 24 entre lesdites extrémités étant supérieur au diamètre du doigt 11. Ici encore, le fonctionnement est clair. Avant l'emboîtement des deux organes (figure 2A), le doigt 11 est dans sa position de repos, en regard d'un point de la face latérale 25 de la nervure 25. L'obliquité de la nervure 25 fait que le doigt mobile s'écarte de la trajectoire de la nervure 26, en glissant sur la face 25 , lorsque la translation de l'organe 22 se poursuit (figure 2B).
- A la fin de la translation, le doigt 11 arrive à l'extrémité de la nervure 25 (figure 2C) puis sous l'action du ressort 19 vient s'appliquer contre la face 26a de la nervure 26 (figure 2D).
- Lorsque l'on entame la manoeuvre de séparation en imprimant à l'organe mâle 22 une translation inverse F4, le doigt 11 glisse sur la face 26a de la nervure 26 (figure 2E) puis, arrivé à l'extrémité de cette nervure, reprend sa position de repos dans le plan diamétral des deux organes (figure 2F) et se trouve ainsi placé en regard de la face extrême de la nervure 26, cette face extrême constituant alors une surface de butée interdisant une translation dans le sens F3. Il suffit de choisir la longueur de la nervure 26 pour que ce moment coincide avec la position à partir de laquelle on désire interdire l'inversion du mouvement. La translation F4 se poursuivant, le doigt rentre en contact avec la face latérale 25b de la nervure 25 et glisse sur cette face jusqu'au moment où, arrivé à l'extrémité opposée de la nervure, il reprend sa position de repos, l'ensemble revenant à la position initiale de la figure 2Ao
- Il doit être bien compris que les deux modes de réalisation décrits, c'est à dire rampe avec encoche en dent de loup et rampe constituée par deux nervures, ne sont donnés qu'à titre d'exemples non limitatifs.
- D'autres dispositions sont possibles. De même, ils peuvent être utilisés indifféremment quel que soit le mouvement relatif des deux organes. La rampe avec encoche de la figure 1 peut être adaptée pour un mouvement de translation axiale, comme la rampe en deux parties de la figure 2 peut être adaptée pour un mouvement de rotation.
- Comme il a été dit ci-avant, le dispositif selon l'invention trouve une application particulèrement intéressante pour les prises de courant électrique, afin d'interdire toute tentative de ré-enclenchement, lorsque la manoeuvre de séparation atteint la position correspondant à la coupure des contacts (figures 1F et 2F). Il faut alors poursuivre la manoeuvre jusqu'au bout, pour revenir à une position où l'accouplement redevient possible (figure 1. et 2A).
Claims (5)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8512569 | 1985-08-21 | ||
| FR8512569A FR2586460B1 (fr) | 1985-08-21 | 1985-08-21 | Dispositif anti-inversion du mouvement relatif de deux organes, respectivement male et femelle, dont l'un est actionne manuellement |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0216645A2 true EP0216645A2 (fr) | 1987-04-01 |
| EP0216645A3 EP0216645A3 (en) | 1988-03-09 |
| EP0216645B1 EP0216645B1 (fr) | 1992-09-23 |
Family
ID=9322317
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP86401594A Expired - Lifetime EP0216645B1 (fr) | 1985-08-21 | 1986-07-17 | Dispositif anti-inversion du mouvement relatif de deux organes respectivement mâle et femelle, dont l'un est actionné manuellement |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US4732567A (fr) |
| EP (1) | EP0216645B1 (fr) |
| JP (1) | JPH0821445B2 (fr) |
| CN (1) | CN1004160B (fr) |
| CA (1) | CA1291799C (fr) |
| DE (1) | DE3686800T2 (fr) |
| FR (1) | FR2586460B1 (fr) |
| IN (1) | IN168042B (fr) |
| MX (1) | MX168064B (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101709734B (zh) * | 2009-12-22 | 2012-05-23 | 中国航空工业集团公司第六三一研究所 | C型锁紧拔插装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1220035A (fr) * | 1959-05-25 | 1960-05-20 | Silec Liaisons Elec | Raccords électriques |
| IT699906A (fr) * | 1962-06-16 | 1900-01-01 | ||
| CH441474A (de) * | 1965-05-18 | 1967-08-15 | Levy Fils Fa | Druckknopfbetätigter Schalter für Hausinstallation |
| DE1765720A1 (de) * | 1968-07-05 | 1971-09-09 | Siemens Ag | Drucktastenschalter |
| US3824362A (en) * | 1973-05-23 | 1974-07-16 | Illinois Tool Works | Alternate action switch mechanism |
| FR2531577A1 (fr) * | 1982-08-09 | 1984-02-10 | Marechal Sepm | Contact electrique a pression a pouvoir de fermeture et d'ouverture incorpore |
| DE3270885D1 (en) * | 1982-10-21 | 1986-06-05 | Marechal Sepm | Socket having a snap-action connection and disconnection |
| US4572601A (en) * | 1984-12-17 | 1986-02-25 | Eaton Corporation | Push-push bayonet lamp socket |
-
1985
- 1985-08-21 FR FR8512569A patent/FR2586460B1/fr not_active Expired
-
1986
- 1986-07-11 IN IN614/DEL/86A patent/IN168042B/en unknown
- 1986-07-17 DE DE8686401594T patent/DE3686800T2/de not_active Expired - Fee Related
- 1986-07-17 EP EP86401594A patent/EP0216645B1/fr not_active Expired - Lifetime
- 1986-07-18 CA CA000514098A patent/CA1291799C/fr not_active Expired - Lifetime
- 1986-08-11 MX MX003415A patent/MX168064B/es unknown
- 1986-08-12 CN CN86105317.6A patent/CN1004160B/zh not_active Expired
- 1986-08-13 US US06/896,062 patent/US4732567A/en not_active Expired - Lifetime
- 1986-08-21 JP JP61194125A patent/JPH0821445B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| IN168042B (fr) | 1991-01-26 |
| CN86105317A (zh) | 1987-02-18 |
| EP0216645B1 (fr) | 1992-09-23 |
| CA1291799C (fr) | 1991-11-05 |
| CN1004160B (zh) | 1989-05-10 |
| DE3686800D1 (de) | 1992-10-29 |
| EP0216645A3 (en) | 1988-03-09 |
| JPH0821445B2 (ja) | 1996-03-04 |
| US4732567A (en) | 1988-03-22 |
| MX168064B (es) | 1993-05-03 |
| FR2586460B1 (fr) | 1987-11-06 |
| AU583642B2 (en) | 1989-05-04 |
| AU6062786A (en) | 1987-02-26 |
| FR2586460A1 (fr) | 1987-02-27 |
| JPS6244964A (ja) | 1987-02-26 |
| DE3686800T2 (de) | 1993-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1437260B1 (fr) | Rétroviseur pour véhicule comportant un miroir monté pivotant sur deux axes perpendiculaires | |
| EP1431845A1 (fr) | Boíte de montre | |
| EP0016683B1 (fr) | Rétroviseur pour véhicule | |
| EP3561608A1 (fr) | Barrette de fixation d'un bracelet a une montre munie de deux pivots retractables | |
| FR2958962A1 (fr) | Commande d'ouverture interieure d'un ouvrant de vehicule automobile et vehicule automobile equipee d'une telle commande. | |
| EP0216645B1 (fr) | Dispositif anti-inversion du mouvement relatif de deux organes respectivement mâle et femelle, dont l'un est actionné manuellement | |
| EP1600653B1 (fr) | Ressort de maintien et de guidage d'un moyen de friction et frein à disque muni d'au moins un tel ressort | |
| EP1709655B1 (fr) | Dispositif de manoeuvre bistable d'un arbre mobile non traversant et coupe-circuit de batterie comprenant un tel dispositif | |
| EP0675022B1 (fr) | Commutateur électrique pour l'alimentation des indicateurs de changement de direction d'un véhicule automobile | |
| EP0422976B1 (fr) | Dispositif de rappel élastique notamment d'un doigt de commande de changement de vitesses dans une boîte de vitesses d'un véhicule automobile | |
| EP0248716A1 (fr) | Commutateur pour vehicules automobiles | |
| FR2499177A1 (fr) | Ecrou d'assemblage dit " auto-centreur " permettant des jeux de dilatation et de retraction entre pieces assemblees | |
| EP0142404A1 (fr) | Perfectionnements apportés aux interrupteurs à porte-contact basculant | |
| EP1972834B1 (fr) | Dispositif de réglage de la commande de vitesse d'un véhicule automobile et procédé associé | |
| EP1286085B1 (fr) | Dispositif de transformation d'un mouvement de translation en mouvement oscillant | |
| FR3028660B1 (fr) | Relais de demarreur pour un dispositif de demarrage | |
| FR2765165A1 (fr) | Dispositif correcteur de l'orientation du faisceau lumineux emis par un projecteur de vehicule automobile | |
| EP0140754B1 (fr) | Commutateur électrique perfectionne commandé par un levier pivotant, en particulier pour véhicules automobiles | |
| EP0753431A1 (fr) | Dispositif de rangement d'objet notamment pour véhicule automobile | |
| FR2934042A1 (fr) | Dispositif de mise a feu pour engins pyrotechniques. | |
| EP1469499A1 (fr) | Dispositif de manoeuvre bistable d'un arbre mobile en translation | |
| EP3849851A1 (fr) | Dispositif de securite de vehicule pour apporter une protection pieton | |
| EP1607268B1 (fr) | Système d'indexage mécanique, notamment pour commutateur électrique | |
| EP1670009B1 (fr) | Mecanisme de commande d'un interrupteur électrique multipolaire | |
| FR2646008A1 (fr) | Potentiometre rotatif |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): DE GB IT |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): DE GB IT |
|
| 17P | Request for examination filed |
Effective date: 19880208 |
|
| 17Q | First examination report despatched |
Effective date: 19901217 |
|
| ITF | It: translation for a ep patent filed | ||
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE GB IT |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REF | Corresponds to: |
Ref document number: 3686800 Country of ref document: DE Date of ref document: 19921029 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| ITTA | It: last paid annual fee | ||
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19970612 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980717 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19980717 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20030924 Year of fee payment: 18 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050717 |