-
Die Erfindung betrifft ein Magnetresonanzgerät mit einem
Gradientenrohr, an dem wenigstens eine im Betrieb strombeflossene
Gradientenspule angeordnet ist, und an dem mehrere Elemente zur
bedarfsabhängigen
Erzeugung einer auf das Gradientenrohr wirkenden Kraft angeordnet
sind, wobei die Lage der Elemente in Abhängigkeit wenigstens einer Eigenschwingungsform
des Gradientenrohrs gewählt
ist, so daß die
jeweilige Eigenschwingungsform bei Betrieb der Elemente anregbar
ist.
-
Mittels solcher Magnetresonanzgeräte ist es
möglich,
Schnittbilder des zu untersuchenden Objekts, in der Regel eines
Patienten, durch bestimmte Körperebenen
zu erzeugen. Dies geschieht mit Hilfe elektromagnetischer Felder.
Um eine Ortsauflösung
der auf Grund eines anliegenden magnetostatischen Grundfelds und eines
anregenden Hochfrequenzfelds erhaltenen Signal zu ermöglichen,
wird mittels mehrerer Gradientenspulen ein Gradientenfeld erzeugt.
In der Regel kommen drei unterschiedliche Gradientenspulen zum Einsatz,
die Felder in x-, y- und z-Richtung bezüglich des Gradientenrohres
erzeugen. Auf Grund des Stromflusses treten Lorentz-Kräfte auf,
die auf das Gradientenrohr wirken und dieses wegen ihres zeitlichen
Verlaufs zum Schwingen anregen. Diese mechanischen Schwingungen
regen nun ihrerseits die Luft um das Gradientenrohr zu Luftdruckschwankungen
an. Diese Schwingungen sind ursächlich
für die
beachtliche Lärmentwicklung
während des
Betriebs des Magnetresonanzgeräts,
wobei Lärmspitzen
weit über
100 dB auftreten. Um diesen Schwingungen entgegenzuwirken und folglich
den Lärm
zu dämpfen
ist es beispielsweise aus
DE
44 32 747 A1 bekannt, mittels piezoelektrischer Elemente,
die am Gradientenrohr angeordnet sind, Gegenkräfte zu erzeugen und so den
von Lorentz-Kräften
angeregten Schwingungen entgegenzuwirken. Die in dem genannten Dokument
beschriebene Anordnung der pie zoelektrischen Elemente erfolgt jedoch
im wesentlichen im Bereich der Spulenleiter. Hinsichtlich der tatsächlich erzeugten
Schwingungen ist die beschriebene Anordnung unselektiv, eine zielgerichtete
Geräuschdämpfung ist
folglich nicht möglich.
-
Aus der Veröffentlichung J. Qiu und J.
Tani "Vibration
control of a cylindrical shell used in MRI equipment" in: Smart Mater.
Struct. 4, 1995, A75–A81
ist eine Möglichkeit
zur Dämpfung
von Gradientenrohrschwingungen unter Verwendung von Piezoelementen
beschrieben, bei denen die der Dämpfung
der X- und Y-Eigenschwingungsformen dienenden Piezoelemente an mehreren
Positionen außerhalb
der Mitte über
die Rohrlänge
verteilt angeordnet sind. Auch die der Dämpfung der Z-Eigenschwingungsformen
dienenden Z-Piezoelemente sind über
die Rohrlänge
verteilt angeordnet und auch an den entsprechenden Rohrlängspositionen
um den Umfang verteilt positioniert. Eine selektive Anregung von
Schwingungsmoden ist dort nicht möglich.
-
Aus
JP
08 - 25 70 08 A ist es bekannt, an einem Spulenkörper mehrere
piezoelektrische Wandler separat zu den Magnetfeldspulen anzuordnen.
-
Der Erfindung liegt damit das Problem
zu Grunde, ein Magnetresonanzgerät
anzugeben, bei dem eine effektive Geräuschdämpfung realisiert ist.
-
Zur Lösung dieses Problems ist bei
einem Magnetresonanzgerät
der eingangs genannten Art erfindungsgemäß vorgesehen, daß die der
Anregung von X- und/oder Y-Eigenschwingungsformen dienenden Elemente
bezogen auf die Länge
des Gradientenrohrs in der Mitte und über den Umfang des Gradientenrohrs
auf diskreten Umfangspositionen verteilt und/oder die der Anregung
von Z-Eigenschwingungsformen dienenden Elemente über die Länge und den Umfang des Gradientenrohrs
verteilt auf diskreten Längen-
und Umfangspositionen angeordnet sind.
-
Die erfindungsgemäße Anordnung der Elemente beruht
auf der Tatsache, daß jede
Schwingung des Gradientenrohres, eine Überlagerung mehrerer Eigenschwingungsformen
ist, d. h., jede Schwingung kann auf bestimmte Eigenschwingungsformen
reduziert werden. Dabei können
die Eigenschwingungsformen unterschiedliche Beiträge zur tatsächlichen
Rohrschwingung liefern. Beim erfindungsgemäßen Gerät ist es infolge der Anordnung
der Elemente vorteilhaft möglich,
wenigstens eine Eigenschwingungsform gezielt und definiert anzuregen,
die der jeweiligen Eigenschwingungsformkomponente der Rohrschwingungen
entgegenwirkt und diese eliminiert. Hierdurch kann effektiv der
Rohrschwingung entgegengewirkt werden, was zu einer Dämpfung derselben
und damit auch des erzeugten Lärms
führt.
-
Das magnetische Grundfeld verläuft längs der
Zylinderachse, die großen
Ströme
fließen
innerhalb von Zylinderschalen, weshalb die entstehenden Lorentz-Kräfte radial
gerichtet sind. Die örtliche
Verteilung der Lorentz-Kräfte
ist in Längsrichtung
des Rohres annähernd
symmetrisch zur Mitte der Länge
des Rohres. Auf in Umfangsrichtung gegenüberliegende Orte wird bei X-
und Y-Gradient Kraft mit entgegengesetzter Phase ausgeübt. Dies
bedeutet, daß von
dieser Lorentz-Kraft nur solche Eigenformen zum Schwingen angeregt
werden, die entsprechende Symmetrieeigenschaften aufweisen. Hier
handelt es sich nur um Eigenformen mit ungeradem Modenparameter,
das heißt,
mit ungerader Anzahl von gleichphasigen Schwingungsbäuchen, weshalb erfindungsgemäß die Elemente
in Abhängigkeit
wenigstens einer Eigenschwingungsform mit ungeradem Modenparameter
plaziert sind. Da erfindungsgemäß die Elemente
in Abhängigkeit
von Umfangs- und/oder Längsschwingungsformen
plaziert sein können,
was darauf zurückzuführen ist,
daß im
akustisch relevanten Frequenzbereich keine nennenswerten radialen
Schwingungen innerhalb des Rohrs auftreten, sind vor allem solche
Eigenformen mit ungeradem Umfangsparameter und ungeradem Längsparameter
relevant. Dabei kann die Plazierung derart sein, daß ausschließlich Umfangsschwingungsformen
erzeugbar sind, da es sich herausgestellt hat, daß jede der
betrachteten Eigenformen aus Umfangs- und Längsschwingungen zusammengesetzt
ist und infolge der gegebenen Symmetrie durch die Lorentz-Kraft
des X-Y-Gradienten vor allem Eigenformen mit Umfangsschwingungen
mit ungerader Modenzahl und zur Mitte des Rohres symmetrischer Längsschwingungen
angeregt werden. Da die Unterdrückung
nur einer Komponente, also entweder der Umfangs- oder der Längsschwingung zur Stillegung
bzw. Dämpfung
der gesamten Schwingungsform führt,
und da die Umfangsschwingungsformen leichter definierbar und separierbar
sind, ist es ausreichend, die Lage der Elemente nur auf Grund dieser
Umfangsschwingungsformen zu bestimmen und nur solche Umfangsschwingungsformen
zur Eliminierung zu erzeugen. Infolge der bereits beschriebenen
Symmetrieeigenschaften der relevanten Schwingungsformen sollten
die Elemente bezogen auf die Länge
des Gradientenrohres in der Mitte angeordnet sein. Die Elemente
müssen
also nicht über
die gesamte Länge
des Gradientenrohres angebracht werden, vielmehr führt allein
die mittige Anordnung symmetriebedingt zu einer hinreichenden Dämpfung.
Ein weiterer Vorteil liegt darin, daß alle geradzahligen Schwingungsmoden
in der Mitte einen Schwingungsknoten zeigen, so daß eine mittige
Anordnung sicherstellt, daß keine
unerwünschten
Schwingungen während
der „Eliminierung" angeregt werden,
die ihrerseits wiederum nachteilig wirken würden. Da in der Regel in der
Mitte die größten Dehnungen
in Längsrich tung
auftreten, ist eine rohrmittige Positionierung auch die effektivste.
Wie bereits beschrieben ist es ausreichend, zur Eliminierung der
Lorentz-Kraft bedingten Schwingungen ausschließlich ungerade Umfangsschwingungsmoden
anzuregen. Zu diesem Zweck kann die Plazierung der Elemente zur
Anregung von Umfangsschwingungsformen mit einer Modenzahl m=1, m=3
und ggf. m=5 gewählt
sein. Höherzahlige
Moden werden bei den gegebenen Betriebsfrequenzen nicht bzw. nur
in vernachlässigbarem Maß angeregt,
ihre diskrete Eliminierung ist nicht unbedingt erforderlich.
-
Der Z-Gradient hingegen ist in Längsrichtung
zur Rohrmitte weitgehend antisymmetrisch. Es werden also nur Längsschwingungen
angeregt, die die gleiche Antisymmetrie aufweisen, das heißt, Punkte,
die in verschiedener Richtung gleichweit von der Rohrmitte entfernt
sind, schwingen mit gleicher Amplitude aber entgegengesetzter Phase.
Folglich sind hier nur geradzahlige Moden relevant, weshalb diese
Elemente in Abhängigkeit
der Z-Eigenschwingungsformen (Längsschwingungen)
gerader Modenzahl plaziert sind. Da keine Bewegung in Umfangsrichtung
stattfindet, sind die Elemente in Längsrichtung außenseitig
anzuordnen. Sie können
infolge der Antisymmetrie über
die Rohrlänge
verteilt an mehreren ausgewählten
Stellen plaziert werden. Dabei ist es ausreichend, die lokale Anordnung
zur Anregung von Längsschwingungsformen
mit einer Modenzahl von 1=2, 1=4 und ggf. 1=6 zu wählen.
-
Wie bereits beschrieben beruht die
erfindungsgemäß erzielbare
Geräuschdämpfung im
Wesentlichen darauf, gezielt und definiert Eigenschwingungsformen
anzuregen. Im Idealfall würde
mit der schwingungsmoden-spezifischen Elementverteilung genau eine
Eigenform zu Schwingungen angeregt und alle anderen nicht beeinflußt. Real
aber werden beispielsweise bei Anregung der Umfangsschwingungsform
m=1 auch die Schwingungen m=3 und m=5 mit angeregt. Um diese insoweit
ungewollt angeregten Schwingungen wieder unterdrücken zu können, können erfindungsgemäß weitere
Elemente zur Erzeugung einer oder mehrerer Schwingungen vorgesehen
sein, die diesen ungewollt angeregten Schwingungen entgegenwirken.
Aus Symmetriegründen
werden auch hier nur ungeradzahlige Schwingungsmoden (bei den X-
und Y-Gradientenspulen)
bzw. geradzahlige Moden (bei der Z-Gradientenspule) angeregt, weshalb
die Anordnung der weiteren Elemente zum Eliminieren von ungeraden
und/oder geraden Eigenschwingungsformen gewählt sein kann, d. h., die weiteren
Elemente sind so angeordnet, daß mit
ihnen entsprechende Unterdrückungsschwingungen
erzeugt werden können.
In der Regel werden mehrere Nebenschwingungen beim Betrieb der eigentlichen
ersten Elemente mit angeregt, weshalb die weiteren Elemente derart
angeordnet sein können,
daß die
von ihnen erzeugte(n) Schwingung(en) gleichzeitig zwei zu eliminierenden
Eigenschwingungsformen entgegenwirkt, wobei dies abhängig von
der jeweils zu unterdrückenden „Hauptschwingung" vor allem die Schwingungsmoden
m=1, m=3, bzw. m=1, m=5 bzw. m=3, m=5 und 1=2, 1=4 bzw. 1=2, 1=6
bzw. 1=4, 1=6 sind. Dabei sollte die Ansteuerung der weiteren Elemente
derart sein, daß sie
in ihrer gesamten Kraftwirkung auf das Gradientenrohr die Kraftwirkung
der ersten Elemente im Hinblick auf die zu eliminierenden Eigenschwingungsformen
im Wesentlichen vollständig
kompensieren, d. h., die weiteren Elemente werden so angesteuert,
daß der
Kraftbeitrag, den die ersten Elemente auf die Erzeugung der ungewollten
Schwingungsmoden haben, im Wesentlichen vollständig ausgeglichen wird. Die
Effektivität,
mit welcher ein weiteres Element den Kraftanteil des „Hauptelements" kompensieren kann,
ist lageabhängig,
d. h., ein Element kann also bei gleicher Ansteuerung wie ein „Hauptelement" nur einen bestimmten
prozentualen Anteil kompensieren. Dies ist bei der jeweiligen Ansteuerung
zu berücksichtigen.
Die Elemente, ggf. die weiteren Elemente können erfindungsgemäß mit ihrer
Wirkrichtung in Umfangs- und/oder Längsrichtung des Gradientenrohres
angeordnet sein. Die jeweilige Anbringung wird abhängig von
der zu erzeugenden Eigenschwingungsform gewählt werden. Beispielsweise
kann eine Eigenschwingung m=1 nicht über in Umfangsrichtung angeordnete
Piezo erzeugt werden, da bei dieser Eigenform keine Verformung in
Umfangsrichtung und somit auch keine Dehnung in Umfangsrichtung
auftritt. Die Eigenform kann nur mit den in Längsrichtung angeordneten Elementen
hinreichend eliminiert werden. Der Vorteil einer solchen Anbringung
liegt ferner darin, daß mit
einer solchen Ausrichtung auch alle anderen Schwingungsmoden mit
hinreichender Ankoppelung angeregt werden, so daß eine Anbringung in Längsausrichtung
am zweckmäßigsten
ist. Dabei können
die Elemente, ggf. die weiteren Elemente, erfindungsgemäß an der
Rohraußenseite
und/oder der Rohrinnenseite angeordnet sein, wobei sich insbesondere
die außenseitige
Anordnung als zweckmäßig erwiesen
hat, da die Umfangsschwingung m=1, die einen wesentlichen Beitrag
zur Geräuschentwicklung
liefert, nur bei außenseitiger
Anordnung erzeugt und damit eliminiert werden kann.
-
Die Elemente, ggf. die weiteren Elemente
sollten jeweils paarweise einander gegenüberliegend am Gradientenrohr
angeordnet und mit einander entgegengesetzter Phase betreibbar sein,
wobei diese Bedingung sowohl für
in Umfangs- wie auch in Längsrichtung
wirkende Elemente gilt. Dabei können
zweckmäßigerweise
die ersten Elemente am Gradientenrohr bei 0° entsprechend der Richtung der
Gradientenachse, die bekämpft
werden soll, und 180° angeordnet
sein, und die weiteren Elemente zur Eliminierung der Umfangsschwingungsmoden
m=3 und m=5 bei einer Anregung des Modes m=1 bei ±45° und ±135°, und die
weiteren Elemente zur Eliminierung der Umfangsschwingungsmoden m=1
und m=5 bei Anregung des Modes m=3 bei ±60° und ±120° bezüglich des Rohrquerschnitts
angeordnet sein. Diese konkreten Anordnungen lassen eine hinreichende
Eliminierung der jeweils ungewollt erzeugten ungeraden Schwingungsmoden
zu, wobei bei der entsprechenden Winkelanordnung und der paarweise
vorgesehenen Elemente die jeweilige Kraftkomponente der erzeugenden
Elemente annähernd
vollständig
kompensiert werden kann.
-
Demgegenüber können erfindungsgemäß die Elemente
zur Anregung des Längsschwingungsmodes 1=2
bei 2/6 und 4/6 und die Elemen-
-
te zur Eliminierung der Längsschwingungsmoden
1=4 und 1=6 bei 1/6 und 5/6 bezogen auf die Länge des Gradientenrohres angeordnet
sein, und die Elemente zur Anregung des Längsschwingungsmodes 1=4 bei 4/10
und 6/10 und die Elemente zur Eliminierung der Längsschwingungsmodes 1=2 und
1=6 bei 2/10 und 8/10 angeordnet sein.
-
Wie beschrieben ist jede Rohrschwingung
auf eine Überlagerung
von Eigenschwingungsformen reduzierbar. Das Verhältnis der schwingungsbildenden
Eigenschwingungsformen ändert
sich aber mit der Frequenz der wirkenden Lorentz-Kraft, die wiederum
abhängig
von der Betriebsfrequenz der Gradientenspule ist. Um dem Rechnung
zu tragen kann erfindungsgemäß ferner
vorgesehen sein, daß die
Elemente, ggf. die weiteren Elemente derart betreibbar sind, daß sich die
von ihnen ausgeübte
Kraft in Abhängigkeit
der Betriebsfrequenz der Gradientenspule und damit der erzeugten
Lorentz-Kraft ändert.
Hierdurch wird sichergestellt, daß die erzeugte „Gegenschwingung" und die „Eliminierungsschwingung" hinreichend und
weder zu stark oder zu schwach sind, um ein optimales Maß an Gegenwirkung
zu erzielen. Diese frequenzabhängige
Ansteuerung ermöglicht,
betreffend den Z-Gradienten, die Elemente zur Anregung der Längsschwingungsmoden.lediglich in
zwei zur Rohrmitte symmetrischen Positionen anzuordnen, an denen
keine der relevanten Längsschwingungen
einen Schwingungsknoten aufweist. Diese Elemente, die um den Umfang
vorzugsweise symmetrisch verteilt sind, und von denen zur Vermeidung
einer ungewollten Anregung etwaiger Umfangsschwingungen mehrere,
insbesondere mehr als sechs vorgesehen sind, werden alle gleichförmig angesteuert.
Infolge der Antisymmetrie und bei Berücksichtigung der elementspezifischen
Kraftwirkung auf die jeweiligen Eigenschwingungsform ist so eine über beachtlichen
Frequenzbereich ausreichende Schwingungserzeugung und -eliminierung
möglich.
Die Elemente selbst können
piezoelektrische Elemente sein, die im Hinblick auf die Beanspruchung
entsprechend auszulegen sind, vorzugsweise als Stapel mit mehreren
Elementen.
-
Weitere Vorteile, Merkmale und Einzelheiten
der Erfindung ergeben sich aus dem in folgenden beschriebenen Ausführungsbeispiel
sowie anhand der Zeichnungen. Dabei zeigen:
-
1 und 2 die Ortsverteilung der
Lorentz-Kräfte
des X-Gradienten
auf der inneren (1)
und äußeren (2) Oberfläche als
Flächenkraft
mit abgewickelten Zylinderoberflächen,
-
3 und 4 eine Gegenüberstellung
der Ortsverteilung der Lorentz-Kräfte der äußeren Oberfläche (3) und die Amplitude der
radialen Auslenkung der m=1, 1=1 Eigenform (4),
-
5 bis 7 eine Darstellung der bei
der Schwingung erzeugten Dehnungen in z-Richtung (Längsrichtung)
des Rohres für
verschiedene Eigenformen mit Darstellung der Orte, Kräfte und
Phasen der Elemente gemäß einer
ersten Verteilung zur Anregung einer m=1 Eigenschwingung,
-
8 bis 10 eine Darstellung der bei
der Schwingung erzeugten Dehnungen in z-Richtung des Rohres für verschiedene
Eigenformen mit Darstellung der Orte, Kräfte und Phasen der Elemente
gemäß einer
zweiten Verteilung zur Anregung einer m=3 Eigenschwingungsform.
-
11 eine
Ansteuerkurve der Hauptelemente der Elementenverteilung gemäß 5 bis 7 über
die Frequenz,
-
12 eine
Ansteuerkurve der Hauptelemente der Verteilung gemäß 8 bis 10 über
die Frequenz,
-
13 ein
Diagramm zur Darstellung der Abnahme der mechanischen Schwingungsamplituden
durch Einsatz der Elemente,
-
14 ein
Diagramm zur Darstellung der Lärmminderung,
-
15 eine
Prinzipskizze zur Anbringung der Elemente gemäß der ersten Verteilung nach 5 bis 7,
-
16 eine
Prinzipskizze zur Anbringung der Elemente gemäß der zweiten Verteilung nach 8 bis 10,
-
17 die
gemeinsame Anbringung aller Elemente,
-
18 eine
Aufsicht auf das Gradientenrohr aus 17,
-
19 ein
Diagramm zur Darstellung des Verlaufs der Lorentz-Kraft des Z-Gradienten über die
Rohrlänge,
und
-
20 ein
Diagramm zur Darstellung verschiedener Längsschwingungsformen und der
sich dazu ergebenden Elementanordnung am Rohr.
-
Da die Eigenschwingungen selbständig nicht
meßbar
sind, ist es erforderlich die Schwingung des Gradientenrohres zu
simulieren. Hierzu wird die Finite-Element-Methode verwendet. Die
Anregung des Gradientenrohrs durch die Lorentz-Kräfte wird
stets als harmonisch angenommen. Aus den einzelnen, mit den jeweiligen
Fourier-Koeffizienten gewichteten harmonischen Anregungen kann das
Schwingungs- und Lärmverhalten
für jede
beliebige periodische Anregungssequenz zur Überlagerung gebildet werden.
-
Jede harmonische Schwingung kann
bei linear elastischem Materialverhalten als Überlagerung der Eigenschwingungen
der Struktur dargestellt werden. Diese Eigenschwingungen mit den
dazugehörigen
Eigenfrequenzen sind abhängig
von der Geometrie, den Materialeigenschaften und den Randbedingungen
(z.B. der Einspannung), während
die wirkenden Kräfte
und die Anregefrequenz letztlich die Koeffizienten bei der Überlagerung
dieser Eigenschwingungen zur Gesamtschwingung ergeben. Allein aus
der Ortsverteilung ergeben sich im Rahmen der modalen Analyse bereits
modale Lastfaktoren, d. h. pro Eigenform eine reelle Zahl, die aussagt,
wie gut die vorgegebene Kraftverteilung die jeweilige Schwingungsform
anregt. Frequenz und Dämpfung
gehen dann in die Überlagerung
der einzelnen Frequenzanteile ein.
-
Zu jeder Eigenschwingungen gehört neben
ihrer Frequenz auch ihre Schwingungsform. Im akustisch relevanten
Frequenzbereich herrschen Biegeschwingungen vor. Radialschwingungen
im Gradientenrohr selbst treten erst bei höheren Frequenzen auf. Die Schwingungskomponenten
können
sich also in zwei Raumdimensionen ausbilden, nämlich in Umfangs- und Längsrichtung
des Rohres. Folglich können
die in diesem Frequenzbereich auftretenden Eigenschwingungen nach
Umfangs- und Längsschwin gungen
klassifiziert werden. Hierzu dient der Umfangsparameter m und der
Längsparameter 1.
Dabei bedeutet m=0, daß zu
jedem Zeitpunkt alle Punkte des Rohrumfangs den gleichen Radius
aufweisen. m=1 gibt an, daß die
auf die Längsachse
des Systems bezogene Radialkomponente der Rohrbewegung bei kleinen
Auslenkungen auf den Umfang näherungsweise
einen Sinus beschreibt, es liegt also ein Querschnittstranslation
vor.
-
m ≥ 2
bedeutet, daß eine
erkennbare Verformung des Rohrumfangs auftritt. Hierbei gibt m die
Anzahl der gleichphasigen Schwingungsbäuche auf dem Umfang an.
-
Der Parameter 1 stellt demgegenüber die
Anzahl der vollständig
ausgebildeten Schwingungsbäuche auf
der gesamten Länge
des Gradientenrohres dar. Neben den durch diese Einteilung beschriebenen
reinen Längsschwingungen
gibt es noch drei Klassen von Sonderformen. Während alle Eigenformen mit
normaler Längsschwingung
an beiden Längsenden
des Rohres gleichphasige Auslenkungen aufweisen, gibt es für die 1=0
Eigenform sowie für
die m=0, 1=1 und die m=1, 1=1 Eigenform je eine zusätzliche
Variante, die an den Längsenden
gegenphasige Auslenkungen aufweist, also ein zur Mitte der Länge des
Rohrs antisymmetrisches Erscheinungsbild zeigt, was nachfolgend
durch ein „a" gekennzeichnet ist.
Desweiteren gibt es Stauchbewegungen, die entweder als alleinige
Schwingungsform oder anderen Schwingungsformen überlagert sind. Diese Eigenformen
werden durch ein „st" hinter der Bezeichnung
der Schwingungsgrundform kenntlich gemacht. Schließlich treten
im betrachteten Frequenzbereich noch Drehbewegungen auf. Hierbei
drehen sich in Längsrichtung
nebeneinanderliegende Bereich in unterschiedliche Richtung. Diese
Eigenformen werden durch ein „dr" hinter der Bezeichnung
der Schwingungsgrundform kenntlich gemacht.
-
Auszuwählen sind die Eigenformen,
die von der beim Betrieb der Gradientenspulen erzeugten Lorentz-Kraft überhaupt
zum Schwingen angeregt werden können
und die überhaupt
einen relevanten Beitrag zur Lärmerzeugung
liefern.
-
Die Ursache für den im Magnetresonanzsystem
auftretenden Lärm
sind die im Grundmagnetfeld fließenden elektrischen Ströme der Gradientenspulen.
Im folgenden wird nur die Wirkung der X-Gradientenspule untersucht,
jedoch lassen sich die Ergebnisse auf die nahezu gleich aufgebaute
Y-Gradientenspule übertragen.
-
Das magnetische Grundfeld, das mittels
dem supraleitenden Magneten des Magnetresonanzgeräts erzeugt
wird, verläuft
längs der
Rohrzylinderachse. Die Ströme
der Gradientenspulen fließen
hauptsächlich
auf Zylinderschalen, weshalb die entstehenden Lorentz-Krafte radial
gerichtet sind. Die X-Gradientenspule besteht aus mehreren symmetrischen
Sattelspulen, von denen jede aus einer Primär- und Sekundärspule,
die bei verschiedenen Radien eingebaut sind, besteht. Beide Spulenteile
werden vom gleichen Strom beflossen, jedoch ist die Stromrichtung
der Primär-
und der Sekundärspule
weitgehend entgegengesetzt. Infolge der radial unterschiedlichen
Lage und dem unterschiedlichen Design liefern beide Spulen unterschiedliche
und entgegengesetzte Beiträge
zur resultierenden Kraft. Diese regt das Gradientenrohr zum Schwingen
an. Dargestellt ist in
1 die
Ortsverteilung der Lorentz-Kraft der Primär- und Sekundärspule auf
der inneren, in
2 auf
der aufßeren
Oberfläche
als Flächenkraft.
Dargestellt sind die abgewickelten Zylinderoberflächen des
Rohres. Die mit den unterschiedlichen Strichstärken dargestellten Bereiche
geben an, daß die
Kräfte
in diesen Bereichen einander entgegengesetzt gerichtet sind, d.h:
die Kraft im stärker
gekennzeichneten Bereich ist entgegengesetzt zur anliegenden Kraft
im schwächer
gekennzeichneten Bereich gerichtet. Wie die
1–
3 anschaulich zeigen, ist
die Lorentz-Kraft in Längsrichtung
symmetrisch zur Mitte des Gradientenrohres. Auf in Umfangsrichtung
gegenüberliegende
Orte wird eine Kraft mit entgegengesetzter Phase ausgeübt. Dies
bedeutet, daß nur
solche Eigenformen zum Schwingen angeregt werden, die die entsprechenden
Symmetrieeigenschaften aufweisen. Dies sind aber im We sentlichen
die Eigenformen mit ungeradem Umfangsparameter m und zur Mitte der
Länge des
Gradientenrohrs symmetrischer Längsschwingung,
also Eigenformen mit ungeraden Längsparameter
1,
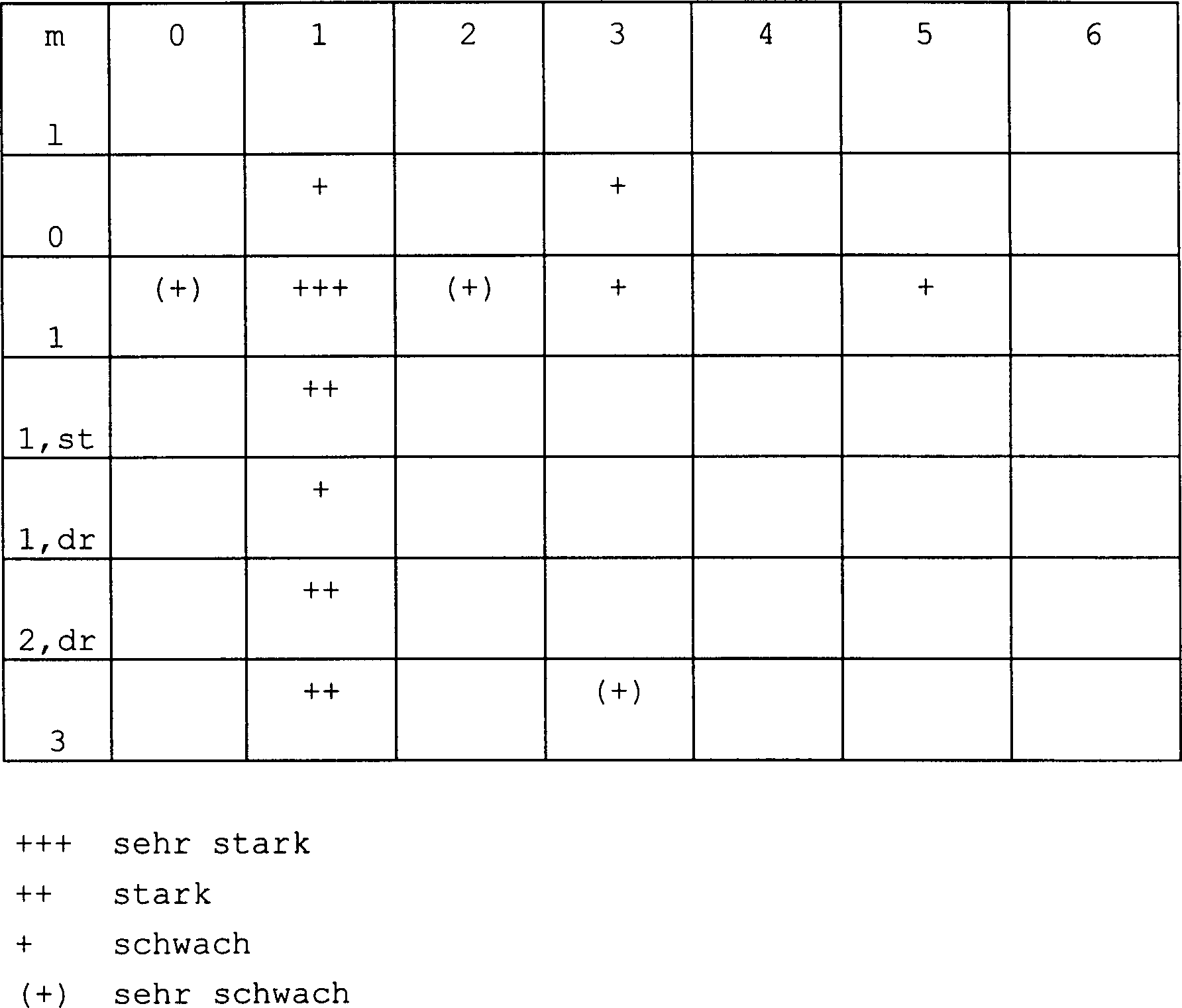
sowie wenige Sonderformen. Die nachfolgende Tabelle 1 zeigt eine
Auswahl relevanter Eigenformen mit nicht zu vernachlässigendem
modalem Partizipationsfaktor: Tabelle
1
-
Den größten modalen Partizipationsfaktor
zeigt die m=1, 1=1 Eigenform. Diese wird extrem gut von der Lorentz-Kraft
angelegt. Zwischen dieser Eigenform und der Lorentz-Kraft herrscht
eine nahezu perfekte örtliche Übereinstimmung,
wie die 3 und 4 zeigen. 3 zeigt nochmals die örtliche Verteilung der Lorentz-Kraft, 4 die Amplitude der radialen
Auslenkung der m=1, 1=1 Eigenform. Der Ort der größten Kraft deckt
sich mit dem Ort der größten radialen
Auslenkung. Dieser Eigenform kommt folglich betreffend den X-Gradienten
besonderes Gewicht zu.
-
Betrachtet man die in Tabelle 1 gezeigten
modalen Partizipationsfaktoren, so kann bereits an dieser Stelle
eine Auswahl der für
den Lärm
verantwortlichen wichtigen Eigenformen getroffen werden. Diese sind (bis
2000 Hz):
m=1,1=0
m=3,1=0
m=1,1=1
m=3,1=1
m=1,1=1,st
m=1,1=3
m=1,1=1,dr
m=1,1=2,dr
m=5,1=1
-
Ausgehend hiervon ist eine Verteilung
der Elemente zur Erzeugung von Kompensationskräften zu bestimmen, die entsprechende
Eigenschwingungen anregen können,
die dann destruktiv bezüglich
der von der Lorentz-Kraft angeregten Eigenschwingung wirken. Als
Elemente werden Piezoelemente verwendet. Diese werden auf dem Gradientenrohr
aufgebracht und wirken dort gegen die Dehnung der Eigenform. Den
Piezoelementen stehen zwei Anbringungsrichtungen zur Verfügung. Sie
können
in Umfangsoder Längsrichtung
aufgebracht werden. Da die m=1 Eigenschwingung nicht über in Umfangsrichtung
angeordnete Piezos „bekämpft" werden können, da
bei diesen Eigenformen keine Verformung in Umfangsrichtung auftritt,
diese Eigenformen jedoch die wichtigsten sind, sind die Piezoelemente
in Längsrichtung
anzubringen.
-
Aus Symmetriegründen werden die Piezoelemente
in der Rohrmitte angeordnet, was die effektivste Längsposition
ist, da hier die Dehnungen am größten sind.
Auf Grund der Symmetrie hat eine mittige Anordnung den entscheidenden
Vorteil, daß keine
von der Lorentz-Kraft nicht angeregten Eigenformen mittels der Piezoelemente
angeregt werden können,
da die geradzahligen Eigenformen in der Rohrmitte einen Dehnungs- und
Schwingungsknoten aufweisen. Zur Vermeidung von Anregungen anderer,
nicht über
die Lorentz-Kraft angeregter Eigenformen, nämlich Eigenformen mit m=0,2,4,6,
werden die Piezos immer paarweise einander gegenüberliegend am Umfang angebracht
und mit entgegengesetzter Phase betrieben.
-
Die Piezoelemente können, da
entsprechende schwingungsbedingte Deformationen des Rohres sowohl
an der Innen- wie auch an der Außenseite gegeben sind, innen
oder außen
angeordnet werden. Im Hinblick darauf, daß mit möglichst wenig Piezoelementen
gearbeitet werden soll, ist diejenige Radiusposition zu bestimmen,
welche eine Anregung sämtlicher
relevanten Eigenformen ermöglicht.
Die möglichen
Positionen der Piezoelemente sind in Tabelle 2 wiedergegeben. Da
die wichtigste Eigenform die m=1, 1=1 Eigenform ist, die sich nur
durch in Längsrichtung
außenseitig
angebrachte Piezoelemente bekämpfen
läßt, ist
die Anordnung der Elemente an diesen Orten zwingend notwendig. Da
aber, vergleiche Tabelle 2, mit diesen Piezoelementen auch alle
anderen relevanten Eigenformen mit hinreichend guter Ankopplung
angeregt werden können,
ist es ausreichend, nur außenseitig
entsprechende Piezoelemente vorzusehen, so daß die Zahl der Elemente gering
gehalten werden kann.
-
Tabelle
2
Hiervon ausgehend ist es
zur Anregung von m=1 Schwingungsformen ausreichend, die Piezoelemente
wie in den
5 bis
7 gezeigt anzuordnen. Die
beiden „Hauptpiezoelemente", die die m=1 Schwingungsform
anregen, sind bei ±90° angeordnet.
Sie liegen sich also am Umfang gegenüber. Da die Anregung einer
m=1 Schwingung gleichzeitig auch m=3 und m=5 Umfangsschwingungen
mit anregt, sind weitere Piezopaare erforderlich, um diese ungewollten
Schwingungen wieder zu eliminieren. Aus Symmetriegründen werden
dazu im gezeigten Verteilungsbeispiel zwei weitere Piezopaare verwendet.
Diese sind in einer Winkelposition am Umfang angeordnet, in der
diese beiden zu eliminierenden Umfangsschwingungen die gleiche Amplituden
und Phasenlage (Dehnung oder Stauchung) ihrer Umfangsschwingung
aufweisen. Diese Voraussetzung ist in jedem Quadranten nur bei der
45°-Position
erfüllt.
Beide zu eliminierenden Umfangsschwingungen weisen hier eine den
Orten der Hauptpiezoelemente entgegensetzte Phasenlage auf, die
Schwingungsamplitude beträgt jeweils
das 0,707-fache der Maximalauslenkung. Um den Effekt der Hauptpiezoelemente
auf diese unerwünschten
Eigenformen zu eliminieren, muß die
Kraftwirkung des Hauptpiezopaares kompensiert werden. Auf Grund
der symmetrisch angeordneten Piezoelemente, die zur Kompensationskrafterzeugung
gemeinsam wirken, muß jedes
dieser auf der 45°-Position
des jeweiligen Quadranten plazierte Piezoelement genau die Hälfte der
Kraftwirkung des Hauptpiezoelements kompensieren. Dies ist für die Ansteuerung
dieser Piezoelemente relevant. Infolge der 0,707-fachen Effektivität dieser
45°-Piezoelemente
muß jeder
Piezo um ca. 70% der Kraft eines Hauptpiezoelements leisten.
-
Die genaue Anordnung der Haupt- und
Eliminierungspiezoelemente ist in den 5 bis 7 wiedergegeben. Auch hier
zeigen die unterschiedlich dick dargestellten Bereiche wieder Gebiete
entgegengesetzter Phasenlage, also Stauchung und Dehnung.
-
Angegeben ist ferner die entsprechende
Ansteuerphase der jeweiligen Piezopaare. Die Piezopaare liegen jeweils
bei ±90° (Hauptpiezoelemente),
bei +45° und –135° sowie bei
+135° und –45° (Eliminierungspiezoelemente).
-
Die 8 bis 10 zeigen eine Piezoelementverteilung,
die ausschließlich
die Anregung der m=3-Eigenform zuläßt und eine Eliminierung der
hierbei zusätzlich
angeregten m=1 und m=5 Umfangsschwingungen zuläßt. Die Hauptpiezoelemente
liegen auch hier wieder bei ±90°. Die Position,
an denen die Schwingungsamplituden der zu elmininierenden Umfangsschwingungen
m=1 und m=5 gleich sind, liegt in diesem Fall bei einer 60°-Winkelposition
bezüglich
der Hauptpiezoelemente. Die Eliminierpiezopaare liegen im gezeigten
Beispiel folglich bei +30°, –150° und +150°, –30°. Die Effektivität dieser
60°-Piezoelemente ist
genau die Hälfte
eines Hauptpiezos, was bedeutet, daß jeder mit dergleichen Kraft
wie der Hauptpiezo angesteuert werden muß.
-
Alle Eigenformen mit m=1 werden durch
die Verteilung 1 bekämpft.
Da es mehrere Eigenformen mit m=1 gibt, die sich in ihrer Wirkung überlagern,
ist die Piezokraft von der Frequenz abhängig.
-
Die 11 und 12 zeigen schließlich die
Ansteuerkurven der Hauptpiezoelemente für die Verteilung 1 (entsprechen
den 5 bis 7) und die Verteilung 2 (entsprechen
den 8 bis 10). Dargestellt
ist in Form einer Prinzipskizze der Kraftverlauf der von den Hauptpiezoelementen
zu erzeugten Kraft über
die Freqenz. Im Fall der 11,
also der Verteilung 1, müssen die Eliminierpiezoelemente
mit 70% dieser Kraft angesteuert werden, im Fall der Verteilung 2 (12) werden alle Piezos mit
der gleichen Kraft angesteuert. Zu beachten ist bei der Ansteuerung
noch die jeweilige Phasenlage.
-
Da die Phasenverschiebung der Schwingung
gegenüber
der Lorentz-Kraft nur von der Frequenz abhängt und die gleiche Phasenverschiebung
auch bei Einsatz der Piezokräfte
auftritt, genügt
es für
harmonische Anregungen die Phase der Piezokraft an der Phase der
Lorentz-Kraft auszurichten. Bei niedrigen Frequenzen kann auf den
Einsatz der Piezoelemente verzichtet werden, da die Lärmentwicklung
des Systems sehr gering ist. Bis zur ersten Eigenfrequenz bleibt
die nötige
Kraft in etwa konstant, da sich alle Eigenformen gleichphasig überlagern.
Wenngleich die Schwingung der ersten Eigenform die Gesamtschwingung
dominiert, sind auf Grund konstruktiver Überlagerung der beteiligten
Eigenformen höhere
Piezokräfte
als für
die erste Eigenform allein erforderlich. Jenseits der Eigenfrequenz
schwingt die zu dieser gehörige
Eigenform gegenphasig zu allen anderen Eigenformen, wobei sich diese
Schwingungen zum größten Teil
destruktiv überlagern.
Mit zunehmendem Abstand zur Eigenfrequenz der ersten Eigenform wird
deren Einfluß auf
die Schwingungsform geringer und der Einfluß der im Frequenzbereich folgenden
Eigenform wächst.
Im weiteren Verlauf der Amplitude gemäß 11 tritt ein ungewöhnliches Verhalten auf. So
treten negative Werte auf, was einer Phasendrehung der Piezokraft
um 180° entspricht.
Der Grund liegt in der Eigenform m=1, 1=1, st. Obwohl die Lorentz-Kraft
eine Biegung der Längsenden
nach unten erzwingt, staucht die obere Fläche des Gradientenrohres, weshalb
die Piezoelemente, sobald diese Eigenform die Schwingung dominiert,
ihre Phase um 180° drehen, um
eine Verkleinerung der Schwingungsamplitude zu erzielen. Bei der
Frequenz, bei der dieser Übergang stattfindet
ist keine Reduktion der Schwingungsbewegung zu erreichen. Bei dieser
Frequenz findet eine destruktive Überlagerung der beteiligten
Eigenformen statt, es verbleibt nur eine kleine Restbewegung des
Gradientenrohrs.
-
Schließlich zeigt 13 den Verlauf der mechanischen Schwingungsamplitude,
wie er sich ohne und mit Piezoelementen ergibt. Ersichtlich liegt
die Schwingungsamplitude ohne Piezoelementeinsatz wesentlich höher als
mit Piezoelementen. Das örtliche
Ansteigen der Schwingungsamplitude mit Piezoelementen kann dabei
gezielt eingesetzt werden, um eine Verstimmung der mechanischen
gegen die akustischen Schwingungen, die in diesen Frequenzbereichen
einen wenngleich geringen Einfluß haben, zu erreichen.
-
14 zeigt
das Lärmspektrum
mit und ohne Einsatz der Piezoelemente. Wie der Figur zu entnehmen ist,
läßt sich
durch den Einsatz der Piezoelemente eine beachtliche Lärmdämpfung erreichen,
die bis zu 20 dB betragen kann, was einzig und allein durch die
erfindungsgemäße „Gegenanregung" der lärmrelevanten
Eigenschwingungsformen erreicht wird. Unter idealen Bedingungen
wäre eine
totale Schwingungsauslöschung möglich.
-
Die 15 und 16 zeigen in separater Darstellung
die Anordnung der Piezoelemente am Gradientenrohr 1. Ersichtlich
sind die Piezoelemente an der Außenseite 2 des Rohres 1 angeordnet. 15 zeigt dabei die Verteilung 1,
welche zur Erzeugung der m=1 Eigenform dient. Neben den beiden Hauptpiezoelementen
HP sind vier weitere Eliminierungspiezoelemente EP vorgesehen, die
jeweils bezüglich
des jeweiligen Hauptpiezoelements unter einem Winkel von 45° angeordnet
sind.
-
16 zeigt
demgegenüber
die Anordnung der Piezoelemente gemäß Verteilung 2. Neben
den beiden Hauptpiezoelementen liegen hier die Eliminierungspiezoelemente
EP jeweils unter einem Winkel von 60° zum jeweiligen Hauptpiezoelement
HP.
-
Schließlich zeigt die 17 beide Verteilungen gemäß den 15, 16 an einem in einem Magnetresonanzgerät 3 befindlichem
Rohr. Ersichtlich kommt nur ein Hauptpiezoelementenpaar zum Einsatz,
da diese bei beiden Verteilungsformen an der gleichen Stelle sitzen. 18 zeigt schließlich eine
Aufsicht auf das Rohr aus 17.
-
Festzuhalten ist abschließend, daß die in
den 15 bis 18 gezeigten Verteilungen
den X-Gradienten betreffen, also für die von den X-Gradientenspulen
erzeugten Eigenschwingungen gelten. Um auch von der Y-Gradientenspule
erzeugte Eigen schwingungen dämpfen
zu können,
die insoweit die gleichen sind, wie sie vom X-Gradienten erzeugt
werden, da der Aufbau der Y-Gradientenspule hinsichtlich der Symmetrie
dem der X-Spule ähnelt, und
lediglich um 90° verdreht
sind, wird die jeweilige Anordnung der Piezoelemente um 90° gedreht,
um dann die vom Y-Gradienten erzeugten Eigenformen bekämpfen zu
können.
-
Abschließend wird ein Beispiel gegeben
für eine
mögliche
Anordnung der Piezoelemente zur "Bekämpfung" von Eigenschwingungen,
die durch die vom Z-Gradienten herrührenden Lorentz-Kräfte erzeugt werden. 19 zeigt ein Diagramm zur
Darstellung des Verlaufs der Lorentz-Kraft, hervorgerufen vom Z-Gradienten über die
Länge des
Gradientenrohres. Ersichtlich ist der Kraftverlauf antisymmetrisch
zur Mitte des Rohres. Dies ist ausschlaggebend für die anregbaren Längsschwingungen:
Es sind also nur solche anregbar, die die gleiche Antisymmetrie
aufweisen, das heißt,
daß Punkte
des Rohres, die in verschiedener Richtung gleichweit von der Rohrmitte
entfernt sind mit gleicher Amplitude aber entgegengesetzter Phase
schwingen. Es sind hier also nur geradzahlige Längsschwingungen beachtlich.
Ein Beispiel für
diese Eigenformen gibt 20 wieder,
in der exemplarisch die Eigenformen 1=2, 1=4 und 1=6 gezeigt sind.
-
Da eine Bewegung der Oberfläche in Umfangsrichtung
bei Schwingungen, die vom Z-Gradienten hervorgerufen werden, nicht
gegeben ist, müssen
folglich die Piezoelemente in Längsrichtung
angeordnet sein, wobei sich hier die größten Dehungen an der Außenseite
ergeben. Um sicherzustellen, daß keine
unerwünschten
Eigenschwingungen außer
der gezielt anzuregenden mitangeregt werden, beispielsweise in Form
von Umfangsschwingungen, wäre
ein ganzer Ring von Piezoelementen auf der jeweils zu ermittelnden
Längsposition anzubringen
und gleichphasig zu betreiben. Da es unter anderem Ziel ist, mit
möglichst
wenig Piezoelementen auszukommen, ist eine minimale Anzahl von Piezoelementen
festzulegen, die symmetrisch auf dem Umfang zu verteilen sind. Ausreichend
sind beispielsweise sechs symmetrisch verteilte Piezoelemente, die
gleichphasig betrieben werden. Die Umfangsschwingung niedrigster
Ordnung, die hierdurch angeregt werden kann, ist die Schwingung
m=12. Diese ist akustisch nicht relevant.
-
Da nur Längsschwingungen mit gerader
Modenzahl angeregt werden können,
sind zur Gegenwirkung auch lediglich solche Längsschwingungen zu erzeugen.
Zu diesem Zweck müssen
alle noch zu wählenden
Piezoelementpositionen symmetrisch zur Rohrmitte sein, das heißt, alle
Orte sind an der Rohrmitte gespiegelt vorhanden. Infolge des antisymmetrischen
Lorentz-Kraftverlaufs
müssen
die Piezoelemente auf diesen Bespiegelten Positionen mit entgegengesetzter
Phase betrieben werden.
-
Zur Wahl der relevanten Piezoelementpositionen
ist zu beachten, daß nur
die Eigenschwingungen mit niedriger Modenzahl für die Lärmerzeugung relevant sind.
Die Eigenfrequenzen der Schwingungen mit 1=8 und höher liegen
nicht mehr im akustisch relevanten Bereich, weshalb bei der Positionsbestimmung
die Eigenformen 1=2, 1=4 und 1=6 beachtlich sind.
-
Ein Beispiel für eine zweckmäßige Positionierung
gibt 20. Die obere Darstellung
gibt den Verlauf der Eigenformen 1=2, 1=4 und 1=6 wieder, die darunterliegende
Darstellung die jeweiligen Piezoelementpositionen. Dargestellt ist
die Elementverteilung zur Anregung der Eigenform 1=2 bei gleichzeitiger
Eliminierung der mitangeregten Schwingungen 1=4, 1=6 und zur gezielten
Anregung der Schwingung 1=4 bei gleichzeitiger Eliminierung der
Schwingungen 1=2 und 1=6.
-
Für
die ausschließliche
Anregung der Eigenform 1=2 sind zwei Positionen pro Halbrohr zu
finden, an denen die 1=4 und 1=6 Schwingung gleich stark sind. Zu
beachten sind, daß zwei
Piezoelemente, die in dem gleichen Schwingungsbauch liegen, einander
störend
beeinflußen.
Als besonders effektiver Ort ergibt sich die Position z=0,666 L,
wobei L die Länge
des Roh res ist. An dieser Position hat die 1=2 Schwingung die größte Dehnung.
Die 1=4 und die 1=6 Schwingungen weisen an dieser Position eine
entgegengesetzte aber gleich schwache Dehnung auf. Um diese zu eliminieren
sind weitere Piezoelemente bei z=0,833 L zu setzen. Hier haben die
Schwingungen 1=4 und 1=6 ebenfalls eine entgegengesetzte aber gleich
starke Dehnung. Bei der 1=2-Schwingung tritt an dieser Position
keine Kraftwirkung auf, da sich hier ein Schwingungsknoten befindet. Entsprechend
gespiegelt sind die Piezoelemente auf der anderen Rohrhälfte in
den Positionen z=0,333 L und z=0,167 L zu setzen. Die Elemente bei
z=0,333 L und z=0,666 L werden mit etwa 1,75 mal weniger Kraft als die
Piezoelemente bei z=0,167 L und z=0,833 L beaufschlagt. Die Phase
ist bei Piezoelementen auf demselben Halbrohr jeweils gleich, von
Halbrohr zu Halbrohr ist sie jedoch unterschiedlich.
-
Die Piezoelemente zur Anregung der
Eigenschwingung 1=4 sind in den Positionen z=0,4 L und z=0,6 L zu
setzen, da hier die 1=4 Eigenform die maximale Dehnung zeigt. In
dieser Position werden auch die 1=2 und 1=6 Schwingungen gleich
stark angeregt, was ebenfalls bei den Positionen z=0,2 L und z=0,8
L der Fall ist. Die Eliminierpiezos sind also an dieser Position
zu setzen. Sie müssen
mit etwa 2,6 mal der Kraft, mit der die Piezoelemente bei z=0,4
L und z=,6 L beaufschlagt werden, betrieben werden, da hier die
Effizienz der Piezoelemente nur ca. ein Drittel beträgt, da die
Dehnung nur etwa ein Drittel so groß ist. Die Phase der Piezokraft
ist bei den Piezoelementen bei z=0,4 und z=0,8 gleich und bei z=0,2
L und z=0,6 L entgegengerichtet.
-
Diese beschriebenen Positionen sind
lediglich beispielhaft. Es können
auch andere Positionen gewählt
werden, wobei solche Positionen zu wählen sind, an denen mittels
möglichst
wenig Piezoelementen effizient eine gewünschte Eigenform angeregt werden
kann und gleichzeitig das Anregungsverhältnis der beiden unbeabsichtigter
Weise mitangeregten Eigenformen gleich oder ähnlich ist. Die Eliminierpiezos
sind dann an entspre chenden Positionen zu setzen, an denen die mitangeregten
Eigenformen das gleiche Verhältnis
wie am Anregungsort aufweisen.
-
Neben der Wahl verschiedener Positionen
für die
Haupt- und Piezoelemente ist auch eine Anordnung möglich, bei
der keine der drei relevanten Längsschwingungen
einen Knoten in der Dehnung aufweist. Die Elemente werden also hier
nur an einer ausgewählten
Position und der dazu gespiegelten Position angeordnet. Um nun gezielt
anzuregen und eliminieren zu können,
ist eine frequenzabhängige
Ansteuerung erforderlich, bei der die unterschiedliche Effektivität der Kraftwirkung
auf die Eigenschwingungen berücksichtigt
wird, wobei hier infolge der Symmetrieeigenschaften alle Piezoelemente
in gleicher Weise angesteuert werden können. Besonders effektiv ist
hier die 0,6 L Position in Verbindung mit der gegenphasigen 0,4
L Position.
 Hiervon ausgehend ist es zur Anregung von m=1 Schwingungsformen ausreichend, die Piezoelemente wie in den
Hiervon ausgehend ist es zur Anregung von m=1 Schwingungsformen ausreichend, die Piezoelemente wie in den