CN216785265U - 一种贴胶装置 - Google Patents
一种贴胶装置 Download PDFInfo
- Publication number
- CN216785265U CN216785265U CN202220042557.1U CN202220042557U CN216785265U CN 216785265 U CN216785265 U CN 216785265U CN 202220042557 U CN202220042557 U CN 202220042557U CN 216785265 U CN216785265 U CN 216785265U
- Authority
- CN
- China
- Prior art keywords
- clamping piece
- handle
- active
- follow
- adhesive sheet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
















Abstract
本申请公开了一种贴胶装置,包括:用于固定玻璃的玻璃治具;用于将胶粘片从离型纸分离的剥胶机构;用于吸取胶粘片,并将胶粘片贴附至玻璃表面的贴胶机构;用于压紧胶粘片与玻璃的压合机构;所述剥胶机构包括剥胶平台,主动夹紧件、随动夹紧件、剥离刃,所述剥胶平台设有空腔,所述主动夹紧件、随动夹紧件位于空腔内;所述主动夹紧件可垂直于所述剥胶平台移动,所述随动夹紧件可平行于剥胶平台移动,且所述主动夹紧件与随动夹紧件之间的张力保持稳定;所述剥离刃位于所述主动夹紧件与随动夹紧件之间,用于分离胶粘片与离型纸。本申请提供的贴胶装置,可以轻松分离胶粘片并吸取进行玻璃的加工,自动化程度高、效率高,可以减轻劳动强度。
Description
技术领域
本申请涉及玻璃加工机械技术领域,特别是涉及一种贴胶装置。
背景技术
在手机、平板电脑等电子设备加工过程中,为了美观或使用需要,会使用异形玻璃。粘合异形玻璃时,通常是将3M胶等胶粘片一面先粘在玻璃上,然后利用胶的另一面将玻璃粘附到目标位置。
胶粘片来料时通常是每个胶粘片一面附带覆膜,同时多个胶粘片均匀排列贴附在离型纸上,加工时需要将胶粘片从离型纸分离,贴在异形玻璃指定位置,为保证胶粘片的稳定,还需要将胶粘片与玻璃压合一定时间,异形玻璃才完成加工,可以用于下一工序。在此过程中涉及多个工序,且材料具有胶粘性,难以准确分离、贴合,加工困难,需要人工干预,效率低。
实用新型内容
为解决上述技术问题,本实用新型的目的为提供一种贴胶装置;本申请提供的贴胶装置,可以轻松分离胶粘片并吸取进行玻璃的加工,自动化程度高、效率高,可以减轻劳动强度。
本实用新型提供的技术方案如下:
一种贴胶装置,包括:
用于固定玻璃的玻璃治具;
用于将胶粘片从离型纸分离的剥胶机构;
用于吸取胶粘片,并将胶粘片贴附至玻璃表面的贴胶机构;
用于压紧胶粘片与玻璃的压合机构;
所述剥胶机构包括剥胶平台,主动夹紧件、随动夹紧件、剥离刃,所述剥胶平台设有空腔,所述主动夹紧件、随动夹紧件位于空腔内;所述主动夹紧件可垂直于所述剥胶平台移动,所述随动夹紧件可平行于剥胶平台移动,且所述主动夹紧件与随动夹紧件之间的张力保持稳定;所述剥离刃位于所述主动夹紧件与随动夹紧件之间,用于分离胶粘片与离型纸。
优选地,所述主动夹紧件通过主动滑块、主动滑轨、主动驱动元件实现移动,所述主动滑轨垂直于剥胶平台设置,所述主动滑块与主动滑轨滑动配合,所述主动夹紧件设在主动滑块上,所述主动驱动元件驱动所述主动滑块移动;主动滑块上还设有驱动所述主动夹紧件夹紧或放松的主动夹持动力元件;
所述随动夹紧件通过随动滑块、随动滑轨、随动气缸实现移动,所述随动滑轨平行于剥胶平台设置,所述随动滑块与随动滑轨相配合,所述随动夹紧件设置在随动滑块上,所述随动气缸一端连接随动滑块,另一端与剥胶平台固定,且所述随动气缸设有张力调节阀;随动滑块上还设有驱动所述随动夹紧件夹紧或放松的随动夹持动力元件。
优选地,所述剥离刃设在空腔靠近所述主动夹紧件的一端;且所述剥离刃和所述剥胶平台表面具有不沾涂层。
优选地,所述贴胶机构包括XY移动平台、贴胶图像采集部件和吸头,所述贴胶图像采集部件和吸头均设在贴胶滑块上,由XY移动平台驱动在水平面内移动;所述吸头还可相对于贴胶滑块在竖直方向移动;
所述吸头设有多个吸附孔,吸附孔分别连通负压发生机构,且所述吸头设有吸附面,所述吸附面由外向内依次设有海绵层、刚性层、弹性层,吸附孔贯穿所述海绵层、刚性层、弹性层。
优选地,所述海绵层的材质为聚氨酯泡沫棉;所述刚性层的材质为钢;所述弹性层的材质为硅胶。
优选地,还设有胶粘片储料仓,所述胶粘片储料仓包括可升降的底板,以及至少四根限位杆,所述限位杆分别设在所述底板的四个侧边,且所述限位杆可靠近或远离所述底板的边缘;
还设有胶粘片上料机构,用于将胶粘片储料仓中的胶粘料材上料至剥胶平台。
优选地,所述限位杆底部设有限位导轨、限位驱动元件,所述限位导轨朝向所述底板的边缘;所述限位杆可滑动地设置在限位导轨上,所述限位驱动元件驱动所述限位杆移动;所述底板下方设有底板升降导轨和底板驱动元件。
优选地,至少一根限位杆包括直立部和弯折部,所述弯折部与所述直立部铰接,且所述弯折部与所述直立部之间设有弹性件,提供弹性力使弯折部与直立部的轴线重合。
优选地,所述玻璃治具设在转盘上,所述贴胶机构、压合机构分别设在转盘外侧不同位置;
所述玻璃治具设有多个通孔,通孔连通负压发生机构;
所述压合机构包括支架、压合驱动元件、压板,压合驱动元件设在支架上,且压合驱动元件的输出端与压板连接。
优选地,还设有贴手柄机构,用于将撕膜手柄贴附在位于玻璃上的胶粘片表面;
所述贴手柄机构包括收放卷组件、手柄分离件、手柄吸取组件和手柄图像采集部件,手柄料带由收放卷组件移动并张紧,且手柄料带绕设在手柄分离件上;
手柄分离件具有尖锐的分离角;
手柄吸取组件用于吸取分离的手柄并将其贴在胶粘片表面;
手柄图像采集部件用于手柄吸取组件的定位。
本申请提供一种贴胶装置,包括玻璃治具、剥胶机构、贴胶机构、压合机构,将需要贴胶的玻璃放置在玻璃治具上,然后由剥胶机构将粘附在离型纸上的一片或多片胶粘片剥离,由贴胶机构吸取并贴附在玻璃表面指定位置,随后由压合机构对贴附在玻璃表面的胶粘片施加压力,使得胶粘片进一步与玻璃粘结牢固,从而完成胶粘片的贴胶加工,玻璃可以下料用于其他工序。本申请提供的贴胶装置,可以轻松分离胶粘片并吸取进行玻璃的加工,自动化程度高、效率高,可以减轻劳动强度。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
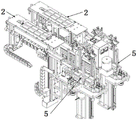
图1为本实用新型实施例中贴胶装置的结构示意图;
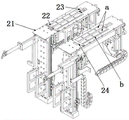
图2为本实用新型实施例中贴胶装置中剥胶机构与胶粘片储料仓的结构示意图(剥胶机构与胶粘片储料仓分别设有两个);
图3为本实用新型实施例中贴胶装置中剥胶机构结构示意图;
图4为本实用新型实施例中贴胶装置中剥胶机构的侧视示意图;
图5为本实用新型实施例中贴胶装置中剥胶机构的俯视示意图;
图6为为本实用新型实施例中贴胶装置中剥胶机构的局部放大示意图;
图7为本实用新型实施例中贴胶装置中贴胶机构的结构示意图;
图8为本实用新型实施例中贴胶装置中贴胶机构的侧视示意图;
图9为本实用新型实施例中贴胶装置中吸头的结构示意图;
图10为本实用新型实施例中贴胶装置中压合机构的结构示意图;
图11为本实用新型实施例中贴胶装置中压合机构的侧视示意图;
图12为本实用新型实施例中贴胶装置中胶粘片储料仓的结构示意图;
图13为本实用新型实施例中贴胶装置中胶粘片储料仓的局部放大示意图;
图14为本实用新型实施例中贴胶装置中贴手柄机构的结构示意图;
图15为本实用新型实施例中贴胶装置中贴手柄机构的收放卷组件和手柄分离件的结构示意图;
图16为本实用新型实施例中贴胶装置中贴手柄机构的手柄分离件的局部放大示意图;
图17为本实用新型实施例中贴胶装置中贴手柄机构的手柄分离件的局部放大示意图(侧视);
图18为本实用新型实施例中贴胶装置中贴手柄机构的手柄吸取组件和手柄图像采集部件的结构示意图;
附图标记:1-玻璃治具;2-剥胶机构;21-剥胶平台;22-主动夹紧件;23- 随动夹紧件;24-剥离刃;3-贴胶机构;31-贴胶图像采集部件;32-吸头;321- 海绵层;322-刚性层;323-弹性层;4-压合机构;41-支架;42-压合驱动元件; 43-压板;5-胶粘片储料仓;51-底板;52-限位杆;521-直立部;522-弯折部; 6-贴手柄机构;61-收放卷组件;62-手柄分离件;63-手柄吸取组件;64-手柄图像采集部件;a-离型纸;b-胶粘片;c-手柄料带。
具体实施方式
为了使本技术领域的人员更好地理解本申请中的技术方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
请如图所示,本实用新型实施例提供一种贴胶装置,包括:
用于固定玻璃的玻璃治具1;
用于将胶粘片从离型纸分离的剥胶机构2;
用于吸取胶粘片,并将胶粘片贴附至玻璃表面的贴胶机构3;
用于压紧胶粘片与玻璃的压合机构4;
所述剥胶机构2包括剥胶平台21,主动夹紧件22、随动夹紧件23、剥离刃24,所述剥胶平台21设有空腔,所述主动夹紧件22、随动夹紧件23位于空腔内;所述主动夹紧件22可垂直于所述剥胶平台21移动,所述随动夹紧件23可平行于剥胶平台21移动,且所述主动夹紧件22与随动夹紧件23之间的张力保持稳定;所述剥离刃24位于所述主动夹紧件22与随动夹紧件23 之间,用于分离胶粘片与离型纸。
本申请提供一种贴胶装置,包括玻璃治具1、剥胶机构2、贴胶机构3、压合机构4,将需要贴胶的玻璃放置在玻璃治具1上,然后由剥胶机构2将粘附在离型纸上的一片或多片胶粘片剥离,由贴胶机构3吸取并贴附在玻璃表面指定位置,随后由压合机构4对贴附在玻璃表面的胶粘片施加压力,使得胶粘片进一步与玻璃粘结牢固,从而完成胶粘片的贴胶加工,玻璃可以下料用于其他工序。本申请提供的贴胶装置,可以轻松分离胶粘片并吸取进行玻璃的加工,自动化程度高、效率高,可以减轻劳动强度。
具体而言,本申请提供的贴胶装置中,剥胶机构2包括剥胶平台21,主动夹紧件22、随动夹紧件23、剥离刃24,粘附多块胶粘片的离型纸(本申请中称为胶粘料材)放置在剥胶平台21上,离型纸的两端分别被主动夹紧件22、随动夹紧件23夹紧;然后主动夹紧件22夹着离型纸向垂直于剥胶平台21的方向移动,随动夹紧件23随之移动,并保持主动夹紧件22和随动夹紧件23 之间的张力不变,使得离型纸在移动过程中保持展平的状态。离型纸被带动着在剥胶平台21上滑动,使得离型纸上的胶粘片移动至剥离刃24处,被剥离刃24分离,分离后的胶粘片位于剥离刃24上表面或位于剥胶平台21表面,此时由贴胶机构3进行吸取,可以很容易的取走胶粘片,不需要提供使胶粘片与离型纸分离的大吸力,不会使离型纸变形而影响其他胶粘片的取用,可以避免胶粘片的胶粘材料误触或留在其他位置,影响装置的正常工作。
剥离刃24对胶粘片的分离,是将刃口对准离型纸与胶粘片之间的间隙设置,同时由主动夹紧件22、随动夹紧件23夹紧离型纸,从而保持离型纸的位置与刃口相匹配。剥胶平台21设有空腔,主动夹紧件22、随动夹紧件23设在空腔内,剥离刃24可以设在空腔中,也可设在空腔上表面。由于剥胶平台 21设有空腔,使得位于剥胶平台21上表面的离型纸可以被主动夹紧件22带着向下穿过剥胶平台21移动,而胶粘片被剥离刃24分离停留在剥胶平台21上表面。同时,主动夹紧件22带动离型纸移动是间歇性的,主动夹紧件22 移动至第一个或第一行的胶粘片被剥离刃24分离,然后暂停;当被分离的胶粘片被吸走后,主动夹紧件22继续移动至第二个或第二行的胶粘片被分离,如此反复进行,直至整张离型纸上所有的胶粘片都被取走,然后主动夹紧件 22、随动夹紧件23松开,离型纸被丢弃,主动夹紧件22、随动夹紧件23回归原始位置,等待对下一个胶粘料材进行剥离操作。
本申请提供的贴胶装置,根据需要,可以设置多个剥胶机构2、贴胶机构 3同时工作,提高效率。
本领域公知胶粘料材,是多个胶粘片的一面粘附在离型纸上,另一面分别设有覆膜,吸取时贴胶机构是吸在覆膜上,将胶粘片进行移动。胶粘片贴在玻璃上以后覆膜仍覆盖在胶粘片上,使得玻璃在进入下一工序之前胶粘片处于被保护的状态,不会沾灰也不会粘在不合适的地方,直至玻璃在下一工序使用前才会将覆膜撕掉。
优选地,所述主动夹紧件22通过主动滑块、主动滑轨、主动驱动元件实现移动,所述主动滑轨垂直于剥胶平台21设置,所述主动滑块与主动滑轨滑动配合,所述主动夹紧件22设在主动滑块上,所述主动驱动元件驱动所述主动滑块移动;主动滑块上还设有驱动所述主动夹紧件22夹紧或放松的主动夹持动力元件;
所述随动夹紧件23通过随动滑块、随动滑轨、随动气缸实现移动,所述随动滑轨平行于剥胶平台21设置,所述随动滑块与随动滑轨相配合,所述随动夹紧件23设置在随动滑块上,所述随动气缸一端连接随动滑块,另一端与剥胶平台(21)固定,且所述随动气缸设有张力调节阀;随动滑块上还设有驱动所述随动夹紧件23夹紧或放松的随动夹持动力元件。
优选主动夹紧件22的移动由主动滑块、主动滑轨、主动驱动元件实现,主动夹紧件22设在主动滑块上,主动驱动元件驱动主动滑块沿主动滑轨移动,带动主动夹紧件22移动;且主动滑块上还设有主动夹持动力元件,控制主动夹紧件22的夹紧或放松。将主动滑轨垂直于剥胶平台21设置,即可实现主动夹紧件22垂直于剥胶平台21移动。
随动夹紧件23的移动则由随动滑块、随动滑轨、随动气缸实现,随动滑轨平行于剥胶平台21设置,随动夹紧件23设在随动滑块上,同时随动气缸连接随动滑块和剥胶平台,通过随动气缸的伸缩维持随动夹紧件23与主动夹紧件22之间的张力恒定,以维持离型纸移动同时保持张紧状态;随动气缸的伸缩幅度由张力调节阀控制。当主动夹紧件22移动,带动离型纸移动,从离型纸传递过来的力更大时,随动气缸伸长,随动夹紧件23随着离型纸移动;反之则随动气缸缩短,以维持主动夹紧件22和随动夹紧件23之间的张力恒定。同样的,随动滑块上还设有随动夹持动力元件,控制随动夹紧件23的夹紧或放松。
通常剥胶平台21是水平设置的,则可将主动滑轨竖直设置在剥胶平台21 下方,使得主动夹紧件22最高的位置伸出空腔,略高于剥胶平台21上表面或与其平齐。随动滑轨则设在剥胶平台21下方,使得随动夹紧件23在水平移动过程中与剥胶平台21上表面的高低位置保持不变。
主动夹紧件22、随动夹紧件23的夹持与松开,通过设置两个或两个以上的夹爪实现,通过滑块导轨配合、螺旋配合或齿轮配合的方式均可实现夹爪的开合。
优选地,所述剥离刃24设在空腔靠近所述主动夹紧件22的一端;且所述剥离刃24和所述剥胶平台21表面具有不沾涂层。
优选剥离刃24靠近设在空腔靠近所述主动夹紧件22的一端,并且剥离刃24和剥胶平台21表面具有不沾涂层,便于分离胶粘片,同时防止胶粘片粘附在剥离刃24和剥胶平台21上取不下来。不沾涂层可以是离型纸所用的涂层也可是本领域公知的不沾材料形成的涂层。
优选地,所述贴胶机构3包括XY移动平台、贴胶图像采集部件31和吸头32,所述贴胶图像采集部件31和吸头32均设在贴胶滑块上,由XY移动平台驱动在水平面内移动;所述吸头32还可相对于贴胶滑块在竖直方向移动;
所述吸头32设有多个吸附孔,吸附孔分别连通负压发生机构,且所述吸头32设有吸附面,所述吸附面由外向内依次设有海绵层321、刚性层322、弹性层323,吸附孔贯穿所述海绵层321、刚性层322、弹性层323。
优选地,所述海绵层321的材质为聚氨酯泡沫棉;所述刚性层322的材质为钢;所述弹性层323的材质为硅胶。
优选贴胶机构3包括XY移动平台、贴胶图像采集部件31和吸头32,贴胶图像采集部件31和吸头32通过XY移动平台实现在水平面内的移动,从而定位、吸取胶粘片,然后移动将胶粘片帖在玻璃上。贴胶图像采集部件31 在吸取胶粘片、贴附胶粘片之前分别进行图像采集,确定目标位置后,吸头 32再工作;吸头32还可相对于贴胶滑块在竖直方向移动,便于吸取和贴附胶粘片。吸头32的吸力由负压发生机构提供。
进一步优选吸头32设有多个吸附孔,吸附孔分别连通负压发生机构,且所述吸头32设有吸附面,所述吸附面由外向内依次设有海绵层321、刚性层 322、弹性层323,吸附孔贯穿所述海绵层321、刚性层322、弹性层323。其中海绵层321位于最外层接触胶粘片,其柔性和弹性可以避免损坏胶粘片,也可避免在将胶粘片贴附到玻璃表面时损伤玻璃;而刚性层322则用于防止吸附面被负压发生机构的真空吸力带动变形,导致不能准确吸取或贴附胶粘片;在引入了刚性层322之后,还设置弹性层321,使得整个吸头32的刚性和弹力维持在合适区间;同时弹性层321还可提高密封性。
优选海绵层321的材质为聚氨酯泡沫棉;所述刚性层322的材质为钢;所述弹性层323的材质为硅胶。
优选地,还设有胶粘片储料仓5,所述胶粘片储料仓5包括可升降的底板 51,以及至少四根限位杆52,所述限位杆52分别设在所述底板51的四个侧边,且所述限位杆52可靠近或远离所述底板51的边缘;
还设有胶粘片上料机构,用于将胶粘片储料仓中的胶粘料材上料至剥胶平台21。
优选还设置胶粘片储料仓5,叠放储存多片胶粘料材,便于取用。具体而言,胶粘片储料仓5包括可升降的底板51,以及至少四根限位杆52。底板51 可升降,则随着胶粘料材被取用,底板51逐渐升起,保持最顶层的胶粘料材位于竖直方向的同一位置,便于胶粘片上料机构进行上料。同时多根限位杆 52位于底板51的四个侧边,限制胶粘料材的位置,保持胶粘料材水平位置的稳定。限位杆52还可靠近或远离所述底板51的边缘,将不整齐的胶粘料材推动叠放整齐。
限位杆52的数量至少为四根,底板51的形状根据离型纸的形状设置,则也可在底板51的长边设置2-3根限位杆52同时或分别移动,进行限位。
优选地,所述限位杆52底部设有限位导轨、限位驱动元件,所述限位导轨朝向所述底板51的边缘;所述限位杆52可滑动地设置在限位导轨上,所述限位驱动元件驱动所述限位杆52移动;所述底板51下方设有底板升降导轨和底板驱动元件。
优选限位杆52的来回移动通过限位导轨、限位驱动元件实现。每个限位杆52的限位导轨朝向所述底板51的边缘(与底板51的边缘垂直),可以保证限位杆52的推挤作用。当底板51的一个侧边设置多个限位杆52时,可以将多个限位杆52通过底部连接块连接设在一个限位导轨上,也可分别设置。
底板51的升降则通过底板升降导轨和底板驱动元件实现。
优选地,至少一根限位杆52包括直立部521和弯折部522,所述弯折部 522与所述直立部521铰接,且所述弯折部522与所述直立部521之间设有弹性件,提供弹性力使弯折部522与直立部521的轴线重合。
优选至少一根限位杆52包括直立部521和弯折部522,并通过弹性件提供弹力使得弯折部522与直立部521的轴线重合,即弯折部522与直立部521 形成一整根限位杆52,起到限位作用。弯折部522在被施加外力对抗弹性件的弹性力时才发生弯折,用于胶粘料材的批量上料,由人工将弯折部522弯曲,再将叠放的多个胶粘料材放在底板51上,则人不需要将手抬高至高于所有的限位杆52的最高处也可完成上料。
通过弹性件的选择,可以实现限位杆52在挤压堆叠的胶粘料材时不发生弯折,上料时施加大于临界点的力才弯折。也可设置可拆卸的固定机构,上料时拆卸,工作时固定。
优选地,所述玻璃治具1设在转盘上,所述贴胶机构3、压合机构4分别设在转盘外侧不同位置;
所述玻璃治具1设有多个通孔,通孔连通负压发生机构;
所述压合机构4包括支架41、压合驱动元件42、压板43,压合驱动元件 42设在支架41上,且压合驱动元件42的输出端与压板43连接;
还设有上料机构6、下料机构7,所述上料机构6用于将玻璃上料至所述玻璃治具1中;所述下料机构7用于将玻璃下料。
优选玻璃治具1设在转盘上,由转盘带动旋转至不同工位,由位于不同工位的贴胶机构3、压合机构4进行加工处理。
玻璃治具1通过多个通孔连通负压发生机构,利用吸力固定玻璃。
压合机构41则包括支架41、压合驱动元件42、压板43,压合驱动元件 42设在支架41上,且压合驱动元件42的输出端与压板43连接,驱动压板 43对玻璃上已经贴好的胶粘片进行挤压,压板可以持续挤压胶粘片一定时间保证粘附的牢固。此外,还可设置压力传感器监测压力。还可在压板43与压合驱动元件42的输出端之间设置辅助板,并将压板43通过多个弹簧与辅助板连接,通过弹簧分散力量,保证即使玻璃放置的位置不平,也可对整个胶粘片进行压合。
本申请提供的贴胶装置,还可设置上料机构6、下料机构7,分别用于玻璃的上料和成品的下料。上料机构6、下料机构7可以使用机械手、传送带等本领域常用的机构。
优选地,还设有贴手柄机构6,用于将撕膜手柄贴附在位于玻璃上的胶粘片表面;
所述贴手柄机构6包括收放卷组件61、手柄分离件62、手柄吸取组件63 和手柄图像采集部件64,手柄料带由收放卷组件61移动并张紧,且手柄料带绕设在手柄分离件62上;
手柄分离件62具有尖锐的分离角;
手柄吸取组件63用于吸取分离的手柄并将其贴在胶粘片表面;
手柄图像采集部件64用于手柄吸取组件63的定位。
优选在压合完成后、下料之前,还有贴手柄机构6的工位,将手柄贴附在玻璃上胶粘片的覆膜上,然后手柄随着玻璃一同下料,下一工序可以利用手柄撕去覆膜,提高效率。
由于手柄是多个均匀排布在料带上进行供料的,本申请提供的贴胶装置,贴手柄机构6包括收放卷组件61、手柄分离件62、手柄吸取组件63和手柄图像采集部件64,手柄料带由收放卷组件61移动并张紧,且手柄料带绕设在手柄分离件62上,即手柄料带绕设在收放卷组件61的收卷轮、放卷轮、手柄分离件62上,并由收放卷组件61带动进行移动,则料带逐渐绕过手柄分离件62尖锐的分离角,此时手柄由于其弹性会与料带分开,然后由手柄图像采集部件64确定手柄位置、手柄吸取组件63吸取手柄,再由手柄图像采集部件64驱动胶粘片位置,手柄吸取组件63将手柄贴在胶粘片的覆膜上,完成贴手柄工作。
更优选在手柄分离件62与手柄吸取组件63之间,还有一个机构将分离的手柄顶升取出,然后由手柄吸取组件63进行吸取。
手柄吸取组件63也可采用吸头连通至负压发生机构的结构。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
Claims (10)
1.一种贴胶装置,其特征在于,包括:
用于固定玻璃的玻璃治具(1);
用于将胶粘片从离型纸分离的剥胶机构(2);
用于吸取胶粘片,并将胶粘片贴附至玻璃表面的贴胶机构(3);
用于压紧胶粘片与玻璃的压合机构(4);
所述剥胶机构(2)包括剥胶平台(21),主动夹紧件(22)、随动夹紧件(23)、剥离刃(24),所述剥胶平台(21)设有空腔,所述主动夹紧件(22)、随动夹紧件(23)位于空腔内;所述主动夹紧件(22)可垂直于所述剥胶平台(21)移动,所述随动夹紧件(23)可平行于剥胶平台(21)移动,且所述主动夹紧件(22)与随动夹紧件(23)之间的张力保持稳定;所述剥离刃(24)位于所述主动夹紧件(22)与随动夹紧件(23)之间,用于分离胶粘片与离型纸。
2.根据权利要求1所述的贴胶装置,其特征在于,所述主动夹紧件(22)通过主动滑块、主动滑轨、主动驱动元件实现移动,所述主动滑轨垂直于剥胶平台(21)设置,所述主动滑块与主动滑轨滑动配合,所述主动夹紧件(22)设在主动滑块上,所述主动驱动元件驱动所述主动滑块移动;主动滑块上还设有驱动所述主动夹紧件(22)夹紧或放松的主动夹持动力元件;
所述随动夹紧件(23)通过随动滑块、随动滑轨、随动气缸实现移动,所述随动滑轨平行于剥胶平台(21)设置,所述随动滑块与随动滑轨相配合,所述随动夹紧件(23)设置在随动滑块上,所述随动气缸一端连接随动滑块,另一端与剥胶平台(21)固定,且所述随动气缸设有张力调节阀;随动滑块上还设有驱动所述随动夹紧件(23)夹紧或放松的随动夹持动力元件。
3.根据权利要求1-2中任一项所述的贴胶装置,其特征在于,所述剥离刃(24)设在空腔靠近所述主动夹紧件(22)的一端;且所述剥离刃(24)和所述剥胶平台(21)表面具有不沾涂层。
4.根据权利要求1所述的贴胶装置,其特征在于,所述贴胶机构(3)包括XY移动平台、贴胶图像采集部件(31)和吸头(32),所述贴胶图像采集部件(31)和吸头(32)均设在贴胶滑块上,由XY移动平台驱动在水平面内移动;所述吸头(32)还可相对于贴胶滑块在竖直方向移动;
所述吸头(32)设有多个吸附孔,吸附孔分别连通负压发生机构,且所述吸头(32)设有吸附面,所述吸附面由外向内依次设有海绵层(321)、刚性层(322)、弹性层(323),吸附孔贯穿所述海绵层(321)、刚性层(322)、弹性层(323)。
5.根据权利要求4所述的贴胶装置,其特征在于,所述海绵层(321)的材质为聚氨酯泡沫棉;所述刚性层(322)的材质为钢;所述弹性层(323)的材质为硅胶。
6.根据权利要求1所述的贴胶装置,其特征在于,还设有胶粘片储料仓(5),所述胶粘片储料仓(5)包括可升降的底板(51),以及至少四根限位杆(52),所述限位杆(52)分别设在所述底板(51)的四个侧边,且所述限位杆(52)可靠近或远离所述底板(51)的边缘;
还设有胶粘片上料机构,用于将胶粘片储料仓中的胶粘料材上料至剥胶平台(21)。
7.根据权利要求6所述的贴胶装置,其特征在于,所述限位杆(52)底部设有限位导轨、限位驱动元件,所述限位导轨朝向所述底板(51)的边缘;所述限位杆(52)可滑动地设置在限位导轨上,所述限位驱动元件驱动所述限位杆(52)移动;所述底板(51)下方设有底板升降导轨和底板驱动元件。
8.根据权利要求6所述的贴胶装置,其特征在于,至少一根限位杆(52)包括直立部(521)和弯折部(522),所述弯折部(522)与所述直立部(521)铰接,且所述弯折部(522)与所述直立部(521)之间设有弹性件,提供弹性力使弯折部(522)与直立部(521)的轴线重合。
9.根据权利要求1所述的贴胶装置,其特征在于,所述玻璃治具(1)设在转盘上,所述贴胶机构(3)、压合机构(4)分别设在转盘外侧不同位置;
所述玻璃治具(1)设有多个通孔,通孔连通负压发生机构;
所述压合机构(4)包括支架(41)、压合驱动元件(42)、压板(43),压合驱动元件(42)设在支架(41)上,且压合驱动元件(42)的输出端与压板(43)连接。
10.根据权利要求1-2、4-9中任一项所述的贴胶装置,其特征在于,还设有贴手柄机构(6),用于将撕膜手柄贴附在位于玻璃上的胶粘片表面;
所述贴手柄机构(6)包括收放卷组件(61)、手柄分离件(62)、手柄吸取组件(63)和手柄图像采集部件(64),手柄料带由收放卷组件(61)移动并张紧,且手柄料带绕设在手柄分离件(62)上;
手柄分离件(62)具有尖锐的分离角;
手柄吸取组件(63)用于吸取分离的手柄并将其贴在胶粘片表面;
手柄图像采集部件(64)用于手柄吸取组件(63)的定位。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202220042557.1U CN216785265U (zh) | 2022-01-06 | 2022-01-06 | 一种贴胶装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202220042557.1U CN216785265U (zh) | 2022-01-06 | 2022-01-06 | 一种贴胶装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216785265U true CN216785265U (zh) | 2022-06-21 |
Family
ID=82013473
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202220042557.1U Active CN216785265U (zh) | 2022-01-06 | 2022-01-06 | 一种贴胶装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN216785265U (zh) |
-
2022
- 2022-01-06 CN CN202220042557.1U patent/CN216785265U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4255433B2 (ja) | 枚葉体の貼合せ方法およびこれを用いた装置 | |
| CN102593521B (zh) | 一种软包装锂电池自动贴胶机 | |
| CN107331885B (zh) | 一种电芯加工设备 | |
| CN109049943B (zh) | 一种双面撕膜机 | |
| CN113752538A (zh) | 一种贴纸上料装置、方法和手机贴膜设备 | |
| CN110733718B (zh) | 一种撕膜方法及应用于该方法中的撕膜装置及撕膜机 | |
| CN211208602U (zh) | 收尾胶贴胶装置及锂电池卷绕设备 | |
| CN108963341B (zh) | 锂电池贴胶纸的方法 | |
| CN216785265U (zh) | 一种贴胶装置 | |
| CN111883812B (zh) | 折弯包胶机 | |
| CN111415886B (zh) | 一种半导体芯片的镀膜贴胶设备 | |
| CN116061541B (zh) | 离型膜批量撕膜机构及撕膜方法 | |
| CN111403759A (zh) | 包胶装置 | |
| CN111379773A (zh) | 一种背胶贴合装置 | |
| CN217936121U (zh) | 一种高效fpc覆膜机 | |
| CN113682876B (zh) | 一种制膜设备 | |
| CN110931662A (zh) | 一种包绝缘膜机 | |
| CN116022428A (zh) | 一种l型电池撕膜机及撕膜方法 | |
| CN113964366A (zh) | 一种电池自动贴尾胶压角机 | |
| CN110667230B (zh) | 一种高精度石墨滚贴机 | |
| CN212542507U (zh) | 一种包绝缘膜机 | |
| CN115284730A (zh) | 一种fpc覆盖膜自动撕膜机 | |
| CN113948753A (zh) | 一种电池贴尾部胶机构 | |
| CN109808188B (zh) | 一种音网自动覆膜贴胶装置 | |
| CN113772475A (zh) | 一种手机钢化膜包装的蓝胶粘贴装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |