CN216104790U - 全自动冲压收料设备 - Google Patents
全自动冲压收料设备 Download PDFInfo
- Publication number
- CN216104790U CN216104790U CN202122594648.4U CN202122594648U CN216104790U CN 216104790 U CN216104790 U CN 216104790U CN 202122594648 U CN202122594648 U CN 202122594648U CN 216104790 U CN216104790 U CN 216104790U
- Authority
- CN
- China
- Prior art keywords
- assembly
- loading
- butt joint
- conveyor belt
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Abstract
本实用新型旨在提供一种兼容性强、能够适配高速冲压生产设备且防止产品损伤的全自动冲压收料设备。本实用新型包括对接传送带组件以及依次连接的若干组收料模组,所述对接传送带组件的输入端与冲压设备的输出端连接,所述收料模组包括搬运模组、输送带组件、料篮以及装料运输模组,所述对接传送带组件的输出端通过导向架组件与第一组所述收料模组的所述输送带组件连接,相邻的两组所述收料模组的所述输送带组件对接,所述料篮装载在所述装料运输模组上,所述料篮上设置有若干产品限位槽,所述搬运模组将所述输送带组件上的物料吸取后移动至所述装料运输模组,所述装料运输模组将产品装载在所述产品限位槽中。本实用新型应用于装料设备的技术领域。
Description
技术领域
本实用新型应用于装料设备的技术领域,特别涉及一种全自动冲压收料设备。
背景技术
现有的冲压设备的效率已经很高了,能够连续不断的进行快速的物料冲压,其中电子产品的中框结构,特别是手机中框结构用于连接屏幕或电路板结构,其面积小、镂空部分多、结构刚性低,如在装料过程中受力不均或者受到较大的冲击力,则会很容易发生折弯。另外,由于手机中框结构的面积较小,所以冲压设备能够一次性冲压较多的产品,这就对收料设备的收料效率要求较高。收料设备通常采用传送带组件进行物料的传送,故而在装料时需要通过吸料组件先将产品从传送带组件上吸取上来,为了保证吸料结构的准确吸料,常规的吸料流程是传送带组件上设置有到位传感器,当物料达到取料位置后传送带组件停止运行,再由吸料组件去取料,如此完成整个取料流程后再进行装盘。但停止运行传送带组件则会存在无法匹配冲压设备的效率,使得冲压设备同样需要停机等待。
现有一公开号为CN104139982B的中国专利,其公开了一种冲压收料摆盘机,它包括实现物料自动间隔及输送的接料输送机构,以及吸取所述接料输送机构输送的物料并实现物料翻转的吸取翻转机构和用于将所述吸取翻转机构翻转后的物料导至料盘中的导料机构。在该技术方案工作时虽然能够连续不断的进行物料吸取装盘,且无需输送结构停机,但是其需要用间隔结构对物料进行定位才能保证吸料的准确性,同时无法兼容不同尺寸的产品。
实用新型内容
本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种兼容性强、能够适配高速冲压生产设备且防止产品损伤的全自动冲压收料设备。
本实用新型所采用的技术方案是:本实用新型包括对接传送带组件以及依次连接的若干组收料模组,所述对接传送带组件的输入端与冲压设备的输出端连接,所述收料模组包括搬运模组、输送带组件、料篮以及装料运输模组,所述对接传送带组件的输出端通过导向架组件与第一组所述收料模组的所述输送带组件连接,相邻的两组所述收料模组的所述输送带组件对接,所述料篮装载在所述装料运输模组上,所述料篮上设置有若干产品限位槽,所述搬运模组将所述输送带组件上的物料吸取后移动至所述装料运输模组,所述装料运输模组将产品装载在所述产品限位槽中。
由上述方案可见,通过所述对接传送带组件与冲压设备的输出端配合进行冲压产品的接取,通过设置导向架组件是产品能够顺利的滑至所述输送带组件上。首先通过采用多组依次连接所述收料模组,同时使相邻的两组所述收料模组的输送带组件对接,进而组成了一条完整且运输距离长的输送带。再通过每组所述收料模组中的所述搬运模组进行产品的取料,且每组所述收料模组的取料互不干涉,后续的收料模组能够将前一组收料模组未取到的产品取走,进而补足收料效率,能够很好的适配高效率的冲压设备。所述料篮是最终用于装载产品的器具,通过设置若干所述产品限位槽进行产品的限位和支撑。由所述装料运输模组与所述搬运模组配合承接搬运来的产品,并将产品平稳的放置在所述料篮中,同时所述装料运输模组承担所述料篮的移动定位。
一个优选方案是,所述搬运模组包括第一直线移动机构、固定架以及若干组吸料组件,所述第一直线移动机构设置在所述输送带组件的上方,所述固定架固定在所述第一直线移动机构的活动端上,若干所述吸料组件阵列设置在所述固定架上,所述吸料组件包括升降气缸和连接板,所述连接板固定在所述升降气缸的活动端上,所述连接板内设置有真空气路,所述连接板上设置有与所述真空气路连通的真空吸盘,所述真空气路与真空发生器连通。
由上述方案可见,通过并列设置的多组所述吸料组件实现对物料的吸取,同时单次运输分批吸取多块产品,进而提高效率,当一组所述搬运组件进行装料运输时,则由下一组所述收料模组的搬运组件进行取料。其中,通过所述第一直线移动机构带动所述固定架运动完成带动不同的所述吸料组件与所述输送带组件配合。通过真空吸盘进行缓冲,同时提供负压实现将产品从所述输送带组件上吸取。
进一步的优选方案是,所述吸料组件还包括至少一组光电传感器,所述光电传感器设置在所述连接板远离所述对接传送带组件的一端,所述光电传感器与所述输送带组件上的产品配合。
由上述方案可见,通过设置所述光电传感器对所述输送带组件上的物料进行检测,当产品触发所述光电传感器后,所述升降气缸伸出的同时所述真空吸盘处产生负压,进而将产品吸附在所述真空吸盘上。通过该结构实现实时响应吸取,吸取稳定且无需输送带组件停机,保证所述输送带组件的运输效率能够匹配冲压设备的生产效率。
进一步的优选方案是,所述输送带组件远离所述装料运输模组的一侧设置有回收托盘,所述回收托盘的一端连接有与所述吸料组件配合的导向滑道。
由上述方案可见,通过设置所述回收托盘进行如冲压损坏或有偏差的不良品的回收,由所述收料模组或前置设备上的视觉模组进行视觉检测。所述搬运模组根据视觉模组的识别数据进行产品的分选,不良品则在吸取后移至所述导向滑道上方进行抛料。
一个优选方案是,所述收料模组还包括安装机架,所述装料运输模组包括第二直线移动机构、载具组件、对接导轨以及承接装载组件,所述第二直线移动机构和所述对接导轨均固定在所述安装机架上,所述载具组件滑动配合在所述安装机架上,所述载具组件与所述第二直线移动机构的活动端连接,所述载具组件与所述对接导轨配合对接,所述料篮装载在所述载具组件上,所述承接装载组件包括设置在所述载具组件上方的第三直线移动机构和升降板,所述第三直线移动机构沿竖直方向设置,所述升降板固定在所述第三直线移动机构的活动端上,所述升降板上设置有旋转驱动组件,所述旋转驱动组件的输出轴连接有转动配合在所述升降板上的转动轴,所述转动轴上阵列设置有与若干所述吸料组件对应配合的若干真空吸板。
由上述方案可见,所述第二直线移动机构用于带动所述载具组件靠近或远离所述承接装载组件,进而实现移动所述载具组件上的所述料篮,使所述承接装载组件将产品放置在所述料篮上不同的产品限位槽中。所述对接导轨用于与外部的运输机构配合,实现连接所述载具组件和外部的运输机构,使所述料篮由所述载具组件驱动送至运输机构中。通过所述第三直线移动机构带动所述升降板作升降运动,进而实现配合所述吸料组件和所述承接装载组件进行产品的中转。所述旋转驱动组件通过所述转动轴带动所述升降板转动,进而实现改变产品的姿态,实现适配所述料篮的结构以防止产品之间相互碰撞造成磨损。
进一步的优选方案是,所述载具组件包括活动载板和驱动电机,所述活动载板滑动配合在所述安装机架上,所述活动载板与所述第二直线移动机构的活动端连接,所述活动载板的两侧均转动设置有若干与所述料篮底部配合的传送滚轮,所述活动载板上转动设置有与所述驱动电机传动连接的传动轴,所述传动轴通过链条传动结构带动若干所述传送滚轮同步转动。
由上述方案可见,由所述驱动电机带动所有所述传送滚轮转动,进而通过所述传送滚轮与所述料篮的底部配合驱动所述料篮移动,完成对所述料篮的上下料作业。当所述活动载板与所述对接导轨对接时,所述料篮与所述对接导轨对齐能够滑动至所述对接导轨上。
更进一步的优选方案是,所述活动载板远离所述承接装载组件的一侧设置有至少两组侧顶气缸,所述活动载板的另一侧设置有与所述料篮配合的限位块,所述活动载板设置有限位块的一侧还设置有与所述料篮配合的检测传感器。
由上述方案可见,通过设置所述侧顶气缸与所述限位块配合实现在装盘的过程中对所述料篮进行限位,同时设置所述检测传感器进行所述料篮到位情况的检测。
进一步的优选方案是,所述承接装载组件还包括缓冲承载组件,所述缓冲承载组件包括设置在所述安装机架内部的活动气缸和连接件,所述连接件固定在所述活动气缸的活动端上,所述安装机架上设有与所述连接件相适配的通口,所述连接件上对应设置有与若干所述真空吸板配合的承载块,所述承载块上设置有缓冲限位槽。
由上述方案可见,通过所述缓冲承载组件与若干所述真空吸板配合进行产品的接取。所述承载块的直径小于所述产品限位槽的通行间隙,所述承载块从所述料篮的底部穿入并先一步进行产品的接取,所述缓冲限位槽用于与产品的底部接触支撑并对产品的下部进行限位,接取后通过所述活动气缸进行缓慢下降,进而将产品平稳的防止在所述产品限位槽中,防止产品受损。所述活动气缸的升降速度可根据需要调节。
进一步的优选方案是,所述转动轴的端部设置有限位圆盘,所述限位圆盘上设置有两块限位挡块,所述升降板上设置有分别与两块所述限位挡块配合的两组缓冲器。
由上述方案可见,通过所述限位圆盘上的两块所述限位挡块分别与所述缓冲器配合,实现对所述转动轴的转动角度进行限位,进而保证产品的姿态与所述产品限位槽相匹配。
一个优选方案是,所述导向架组件包括导向槽板和至少两对连接杆,所述连接杆的一端与所述导向槽板固定连接,所述连接杆的另一端设置有腰型孔,所述连接杆通过所述腰型孔与所述对接传送带组件的机架连接固定。
由上述方案可见,通过在所述连接杆上设置所述腰型孔,进而使的所述连接杆的安装高度能够进行适应性调整,通过改变两对所述连接杆的相对位置,能够实现调整所述导向槽板的斜度,提供不同尺寸的产品下滑所需的加速度。
附图说明
图1是本实用新型的立体结构示意图;
图2是所述对接传送带组件与所述收料模组的对接结构示意图;
图3是图2中A部分的放大图;
图4是所述收料模组的立体结构示意图;
图5是图4中B部分的放大图;
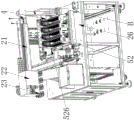
图6是所述收料模组的部分结构示意图;
图7是图6中C部分的放大图;
图8是实施例二中所述吸料组件23的立体结构示意图。
具体实施方式
实施例一:
如图1至图7所示,在本实施例中,本实用新型包括对接传送带组件1以及依次连接的若干组收料模组,所述对接传送带组件1的输入端与冲压设备的输出端连接,所述收料模组包括搬运模组2、输送带组件3、料篮4以及装料运输模组5,所述对接传送带组件1的输出端通过导向架组件6与第一组所述收料模组的所述输送带组件3连接,相邻的两组所述收料模组的所述输送带组件3对接,所述料篮4装载在所述装料运输模组5上,所述料篮4上设置有若干产品限位槽7,所述搬运模组2将所述输送带组件3上的物料吸取后移动至所述装料运输模组5,所述装料运输模组5将产品装载在所述产品限位槽7中。
在本实施例中,所述搬运模组2包括第一直线移动机构21、固定架22以及四组吸料组件23,所述第一直线移动机构21设置在所述输送带组件3的上方,所述固定架22固定在所述第一直线移动机构21的活动端上,四组所述吸料组件23阵列设置在所述固定架22上,所述吸料组件23包括升降气缸231和连接板232,所述连接板232固定在所述升降气缸231的活动端上,所述连接板232内设置有真空气路,所述连接板232上设置有与所述真空气路连通的真空吸盘,所述真空气路与真空发生器连通。
在本实施例中,所述吸料组件23还包括一组光电传感器233,所述光电传感器233设置在所述连接板232远离所述对接传送带组件1的一端,所述光电传感器233与所述输送带组件3上的产品配合。
在本实施例中,所述输送带组件3远离所述装料运输模组5的一侧设置有回收托盘24,所述回收托盘24的一端连接有与所述吸料组件23配合的导向滑道25。
在本实施例中,所述收料模组还包括安装机架26,所述装料运输模组5包括第二直线移动机构51、载具组件52、对接导轨53以及承接装载组件54,所述第二直线移动机构51和所述对接导轨53均固定在所述安装机架26上,所述载具组件52滑动配合在所述安装机架26上,所述载具组件52与所述第二直线移动机构51的活动端连接,所述载具组件52与所述对接导轨53配合对接,所述料篮4装载在所述载具组件52上,所述承接装载组件54包括设置在所述载具组件52上方的第三直线移动机构541和升降板542,所述第三直线移动机构541沿竖直方向设置,所述升降板542固定在所述第三直线移动机构541的活动端上,所述升降板542上设置有旋转驱动组件543,所述旋转驱动组件543的输出轴连接有转动配合在所述升降板542上的转动轴544,所述转动轴544上阵列设置有与四组所述吸料组件23对应配合的四组真空吸板545。所述第一直线移动机构21和所述第二直线移动机构51均为直线电缸。所述第三直线移动机构541包括电机、丝杆以及丝杆滑块,所述电机固定在所述第二直线移动机构51的机架上,所述丝杆滑块适配在所述丝杆上,所述升降板542滑动配合在所述第二直线移动机构51的机架上,且所述升降板542与所述丝杆滑块固定连接,所述电机的输出轴通过同步带带动所述丝杆转动,进而带动所述升降板542升降,通过采用具有精确传动的丝杆作为传动机构进而实现所述升降板542准确升降。
在本实施例中,所述载具组件52包括活动载板521和驱动电机522,所述活动载板521滑动配合在所述安装机架26上,所述活动载板521与所述第二直线移动机构51的活动端连接,所述活动载板521的两侧均转动设置有若干与所述料篮4底部配合的传送滚轮523,所述活动载板521上转动设置有与所述驱动电机522传动连接的传动轴,所述传动轴通过链条传动结构带动若干所述传送滚轮523同步转动。
在本实施例中,所述活动载板521远离所述承接装载组件54的一侧设置有至少两组侧顶气缸524,所述活动载板521的另一侧设置有与所述料篮4配合的限位块525,所述活动载板521设置有限位块525的一侧还设置有与所述料篮4配合的检测传感器526。
在本实施例中,所述承接装载组件54还包括缓冲承载组件,所述缓冲承载组件包括设置在所述安装机架26内部的活动气缸和连接件,所述连接件固定在所述活动气缸的活动端上,所述安装机架26上设有与所述连接件相适配的通口,所述通口位于所述升降板542的正下方,所述连接件上对应设置有与四组所述真空吸板545配合的四组承载块546,所述承载块546上设置有缓冲限位槽547。
在本实施例中,所述转动轴544的端部设置有限位圆盘548,所述限位圆盘548上设置有两块限位挡块,所述升降板542上设置有分别与两块所述限位挡块配合的两组缓冲器549。
在本实施例中,所述导向架组件6包括导向槽板61和至少两对连接杆62,所述连接杆62的一端与所述导向槽板61固定连接,所述连接杆62的另一端设置有腰型孔63,所述连接杆62通过所述腰型孔63与所述对接传送带组件1的机架连接固定。
本实用新型的工作原理:
首先,所述对接传送带组件1接取冲压设备出来的产品,并运输至第一组所述收料模组的所述输送带组件3上,所述输送带组件3持续带动产品做直线运动。所述第一直线移动机构21带动所述固定架22移动至所述输送带组件3上方,并使未吸取产品的所述吸料组件23对齐所述输送带组件3,当所述光电传感器233检测到所述输送带组件3上有产品经过时反馈信号,使所述升降气缸231带动所述连接板232下降,通过所述真空吸盘吸附住产品并抬升,完成一次取料后所述第一直线移动机构21带动所述固定架22移动切换另一组未取料的所述吸料组件23进行取料。完成四组所述吸料组件23的吸料后,所述第一直线移动机构21带动所述固定架22移动至所述装料运输模组5上方进行产品装料作业。其中,进行产品装料作业时,取料作业由下一组所述收料模组接替,进而实现连续接料装盘。另外,由视觉模组判断产品的形状,所述搬运模组2在吸取到不良品时,则会执行抛料作业,将不良品抛置在所述导向滑道25上,使不良品落入所述回收托盘24中。
进行产品装料作业时,两组所述侧顶气缸524伸出将所述料篮4夹紧在所述活动载板521上,所述旋转驱动组件543将四组所述真空吸板545转动至水平状态,所述吸料组件23破真空将产品放置在所述真空吸板545上,所述真空吸板545上的吸盘结构与真空发生器连接产生负压吸紧产品。所述旋转驱动组件543通过所述转动轴544带动四组所述真空吸板545转动至竖直状态,匹配所述料篮4上的所述产品限位槽7。所述承载块546抬升至接料高度,所述第三直线移动机构541带动所述升降板542下降并将产品平稳的置于所述承载块546的所述缓冲限位槽547中,所述承载块546接取产品后,所述活动气缸缩回带动所述连接块下降,进而使所述承载块546将产品置于所述产品限位槽7中,保证产品不受损。
完成一组产品的放置后,所述第二直线移动机构51带动所述载具组件52移动一个所述产品限位槽7的距离,进而切换另一组所述产品限位槽7进行产品的接取。
完成所述料篮4上所有所述产品限位槽7的产品装载后,所述第二直线移动机构51带动所述活动载板521与所述对接导轨53对接,所述驱动电机522驱动若干所述传送滚轮523带动所述料篮4通过所述对接导轨53滑动至外部的运输机构上。
实施例二:
如图8所示,本实施例与实施例一的不同之处在于:所述吸料组件23包括两组光电传感器233,两组所述光电传感器233分别设置在所述连接板232的两端,两组所述光电传感器233均与所述输送带组件3上的产品配合。
通过同时设置两组所述光电传感器233,当靠近所述对接传送带组件1的一端的所述光电传感器233识别到产品时,所述升降气缸231进入预备缓慢伸出,在另一组所述光电传感器233识别到产品后再驱动所述升降气缸231快速响应伸出,实现准确吸取产品。
Claims (10)
1.全自动冲压收料设备,其特征在于:它包括对接传送带组件(1)以及依次连接的若干组收料模组,所述对接传送带组件(1)的输入端与冲压设备的输出端连接,所述收料模组包括搬运模组(2)、输送带组件(3)、料篮(4)以及装料运输模组(5),所述对接传送带组件(1)的输出端通过导向架组件(6)与第一组所述收料模组的所述输送带组件(3)连接,相邻的两组所述收料模组的所述输送带组件(3)对接,所述料篮(4)装载在所述装料运输模组(5)上,所述料篮(4)上设置有若干产品限位槽(7),所述搬运模组(2)将所述输送带组件(3)上的物料吸取后移动至所述装料运输模组(5),所述装料运输模组(5)将产品装载在所述产品限位槽(7)中。
2.根据权利要求1所述的全自动冲压收料设备,其特征在于:所述搬运模组(2)包括第一直线移动机构(21)、固定架(22)以及若干组吸料组件(23),所述第一直线移动机构(21)设置在所述输送带组件(3)的上方,所述固定架(22)固定在所述第一直线移动机构(21)的活动端上,若干所述吸料组件(23)阵列设置在所述固定架(22)上,所述吸料组件(23)包括升降气缸(231)和连接板(232),所述连接板(232)固定在所述升降气缸(231)的活动端上,所述连接板(232)内设置有真空气路,所述连接板(232)上设置有与所述真空气路连通的真空吸盘,所述真空气路与真空发生器连通。
3.根据权利要求2所述的全自动冲压收料设备,其特征在于:所述吸料组件(23)还包括至少一组光电传感器(233),所述光电传感器(233)设置在所述连接板(232)远离所述对接传送带组件(1)的一端,所述光电传感器(233)与所述输送带组件(3)上的产品配合。
4.根据权利要求2所述的全自动冲压收料设备,其特征在于:所述输送带组件(3)远离所述装料运输模组(5)的一侧设置有回收托盘(24),所述回收托盘(24)的一端连接有与所述吸料组件(23)配合的导向滑道(25)。
5.根据权利要求2所述的全自动冲压收料设备,其特征在于:所述收料模组还包括安装机架(26),所述装料运输模组(5)包括第二直线移动机构(51)、载具组件(52)、对接导轨(53)以及承接装载组件(54),所述第二直线移动机构(51)和所述对接导轨(53)均固定在所述安装机架(26)上,所述载具组件(52)滑动配合在所述安装机架(26)上,所述载具组件(52)与所述第二直线移动机构(51)的活动端连接,所述载具组件(52)与所述对接导轨(53)配合对接,所述料篮(4)装载在所述载具组件(52)上,所述承接装载组件(54)包括设置在所述载具组件(52)上方的第三直线移动机构(541)和升降板(542),所述第三直线移动机构(541)沿竖直方向设置,所述升降板(542)固定在所述第三直线移动机构(541)的活动端上,所述升降板(542)上设置有旋转驱动组件(543),所述旋转驱动组件(543)的输出轴连接有转动配合在所述升降板(542)上的转动轴(544),所述转动轴(544)上阵列设置有与若干所述吸料组件(23)对应配合的若干真空吸板(545)。
6.根据权利要求5所述的全自动冲压收料设备,其特征在于:所述载具组件(52)包括活动载板(521)和驱动电机(522),所述活动载板(521)滑动配合在所述安装机架(26)上,所述活动载板(521)与所述第二直线移动机构(51)的活动端连接,所述活动载板(521)的两侧均转动设置有若干与所述料篮(4)底部配合的传送滚轮(523),所述活动载板(521)上转动设置有与所述驱动电机(522)传动连接的传动轴,所述传动轴通过链条传动结构带动若干所述传送滚轮(523)同步转动。
7.根据权利要求6所述的全自动冲压收料设备,其特征在于:所述活动载板(521)远离所述承接装载组件(54)的一侧设置有至少两组侧顶气缸(524),所述活动载板(521)的另一侧设置有与所述料篮(4)配合的限位块(525),所述活动载板(521)设置有限位块(525)的一侧还设置有与所述料篮(4)配合的检测传感器(526)。
8.根据权利要求5所述的全自动冲压收料设备,其特征在于:所述承接装载组件(54)还包括缓冲承载组件,所述缓冲承载组件包括设置在所述安装机架(26)内部的活动气缸和连接件,所述连接件固定在所述活动气缸的活动端上,所述安装机架(26)上设有与所述连接件相适配的通口,所述连接件上对应设置有与若干所述真空吸板(545)配合的承载块(546),所述承载块(546)上设置有缓冲限位槽(547)。
9.根据权利要求5所述的全自动冲压收料设备,其特征在于:所述转动轴(544)的端部设置有限位圆盘(548),所述限位圆盘(548)上设置有两块限位挡块,所述升降板(542)上设置有分别与两块所述限位挡块配合的两组缓冲器(549)。
10.根据权利要求1所述的全自动冲压收料设备,其特征在于:所述导向架组件(6)包括导向槽板(61)和至少两对连接杆(62),所述连接杆(62)的一端与所述导向槽板(61)固定连接,所述连接杆(62)的另一端设置有腰型孔(63),所述连接杆(62)通过所述腰型孔(63)与所述对接传送带组件(1)的机架连接固定。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122594648.4U CN216104790U (zh) | 2021-10-27 | 2021-10-27 | 全自动冲压收料设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122594648.4U CN216104790U (zh) | 2021-10-27 | 2021-10-27 | 全自动冲压收料设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216104790U true CN216104790U (zh) | 2022-03-22 |
Family
ID=80710070
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122594648.4U Active CN216104790U (zh) | 2021-10-27 | 2021-10-27 | 全自动冲压收料设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN216104790U (zh) |
-
2021
- 2021-10-27 CN CN202122594648.4U patent/CN216104790U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110979840A (zh) | 移液吸头自动装滤芯装盒机 | |
| CN108557439B (zh) | 平面物体筛选下料装置 | |
| CN211839090U (zh) | 片材工件用视觉自动检测设备 | |
| CN110733882A (zh) | 分拣设备 | |
| CN211768283U (zh) | 一种传送装置、传送设备和传送系统 | |
| CN113998429A (zh) | Pcb钻靶机自动化上料设备 | |
| CN109590510B (zh) | 线路板在线追溯码钻孔设备 | |
| CN214692092U (zh) | 上料设备 | |
| CN214494458U (zh) | 一种物料上下料输送设备 | |
| CN216104790U (zh) | 全自动冲压收料设备 | |
| CN112903704A (zh) | 一种智能循环运动检测设备 | |
| CN113895956A (zh) | 全自动冲压收料设备 | |
| CN215845350U (zh) | 一种限位板冲压上料装置 | |
| CN215323725U (zh) | 一次性手套包装机及其供料装置 | |
| CN214622359U (zh) | 一种智能循环运动检测设备 | |
| CN211685779U (zh) | 装箱组件 | |
| CN114313766A (zh) | 一种生产线自动化上下料机构 | |
| CN210339421U (zh) | 一种曝光机框架上料机构 | |
| CN211076575U (zh) | 移液吸头自动装滤芯装盒机 | |
| CN110950072B (zh) | 收料装置 | |
| CN113804622A (zh) | 外观检测设备 | |
| CN113453532A (zh) | 用于cob自动组装的传输装置 | |
| CN220392514U (zh) | 一种凸轮上料机构 | |
| CN111151466A (zh) | 片材工件用视觉自动检测设备 | |
| CN219162000U (zh) | 产品检测机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |