CN215345941U - 一种自由度高的苹果采摘机器人 - Google Patents
一种自由度高的苹果采摘机器人 Download PDFInfo
- Publication number
- CN215345941U CN215345941U CN202120258834.8U CN202120258834U CN215345941U CN 215345941 U CN215345941 U CN 215345941U CN 202120258834 U CN202120258834 U CN 202120258834U CN 215345941 U CN215345941 U CN 215345941U
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- block
- picking robot
- high degree
- apple
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000000694 effects Effects 0.000 claims abstract description 10
- 238000009434 installation Methods 0.000 claims abstract description 9
- 230000035939 shock Effects 0.000 claims description 16
- 238000007789 sealing Methods 0.000 claims description 11
- 238000000034 method Methods 0.000 abstract description 6
- 241000220225 Malus Species 0.000 description 52
- 235000011430 Malus pumila Nutrition 0.000 description 47
- 235000015103 Malus silvestris Nutrition 0.000 description 47
- 230000001360 synchronised effect Effects 0.000 description 9
- 235000021016 apples Nutrition 0.000 description 8
- 238000010521 absorption reaction Methods 0.000 description 6
- 235000013399 edible fruits Nutrition 0.000 description 4
- 244000141359 Malus pumila Species 0.000 description 3
- 239000006260 foam Substances 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000007547 defect Effects 0.000 description 2
- 239000002420 orchard Substances 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images




Landscapes
- Manipulator (AREA)
Abstract
本实用新型涉及采摘机器人技术领域,公开了一种自由度高的苹果采摘机器人,包括安装块和支撑板,所述安装块的上表面固定连接有第一支撑柱,第一支撑柱的一侧转动连接有第一连接柱,第一支撑柱的上表面固定连接有第一电动推杆,第一连接柱的一侧固定连接有第一支撑块,第一支撑块与第一电动推杆转动连接,且第一连接柱的一侧固定连接有第一提手,所述第一连接柱的顶端转动连接有连接块,第一连接柱的一侧固定连接有第二支撑块,第二支撑块的上表面转动连接有第二电动推杆。本发明解决了在操作过程中,采摘机器人的自由度较低不方便调节的问题,达到了调节效果,方便苹果的采摘,提高了作业人员的使用效果。
Description
技术领域
本实用新型涉及采摘机器人技术领域,具体为一种自由度高的苹果采摘机器人。
背景技术
苹果是我们国家重要的优势农产品之一,在水果市场需求的带动下,产业结构的不断调整,规模经营的发展,将机械化、自动化的采摘技术引进果农业中,是高效减轻果农劳动力提高产量的重中之重,故而,设计出一种可以帮助果农顺利完成采摘苹果的采摘机器人。
目前,现有的苹果采摘机器人,大多存在以下的不足:在操作过程中,采摘机器人的自由度较低,使得调节效果较差,不能方便苹果的采摘,影响作业人员的使用,综上,现有的苹果采摘机器人大多还不能很好地契合实际需要。
发明内容
针对现有技术的不足,本实用新型提供了一种自由度高的苹果采摘机器人,主要为解决在操作过程中,采摘机器人的自由度较低,使得调节效果较差,不能方便苹果的采摘,影响作业人员使用的问题。
为实现上述目的,本实用新型提供如下技术方案:一种自由度高的苹果采摘机器人,包括安装块和支撑板,所述安装块的上表面固定连接有第一支撑柱,第一支撑柱的一侧转动连接有第一连接柱,第一支撑柱的上表面固定连接有第一电动推杆,第一连接柱的一侧固定连接有第一支撑块,第一支撑块与第一电动推杆转动连接,且第一连接柱的一侧固定连接有第一提手,所述第一连接柱的顶端转动连接有连接块,第一连接柱的一侧固定连接有第二支撑块,第二支撑块的上表面转动连接有第二电动推杆,第二电动推杆的一端与连接块转动连接,所述连接块的两侧固定连接有第二连接柱,第二连接柱的上表面固定连接有第三支撑块,第三支撑块的一侧转动连接有第三电动推杆,且第二连接柱的一侧固定连接有第二提手,所述第二连接柱的一端转动连接有第二支撑柱,第二支撑柱与第三电动推杆转动连接,且第二支撑柱的一侧固定连接有抓手。
进一步的:所述支撑板的上表面固定连接有连接环,连接环的两侧固定连接有轴承,安装块的下表面固定连接有固定柱,固定柱与轴承相固定。
在前述方案的基础上:所述支撑板的上表分别固定连接有蓄电池、控制器和安装板,安装板的顶端固定连接有触控显示屏,蓄电池与控制器和触控显示屏电性连接,控制器与第一电动推杆、第二电动推杆和第三电动推杆电性连接。
作为本实用新型再进一步的方案:所述支撑板的上表面固定连接有第一电机,第一电机输出轴的一端固定连接有齿轮,支撑板的下表面固定连接有两个固定块,固定块的一侧滑动连接有滑动杆,滑动杆的一端固定连接有活动球,滑动杆的另一端固定连接有齿条,齿轮与齿条相啮合,且第一电机与蓄电池电性连接。
进一步的:所述支撑板的下表面固定连接有两个第一安装框,第一安装框的底部固定连接有U形安装架,U形安装架的两侧固定连接有第一减震架,第一减震架的一侧固定连接有连接杆,连接杆的一端固定连接有活动杆,活动杆与活动球转动连接,且第一减震架的一侧转动连接有固定轴,固定轴的两端均固定连接有前轮。
在前述方案的基础上:所述支撑板的下表面固定连接有第二电机,第二电机输出轴的一端固定连接有第一带轮,第一带轮的一侧绕接有同步带,且支撑板的下表面固定连接有两个第二安装框,第二安装框的底部均固定连接有连接条。
作为本实用新型再进一步的方案:所述连接条的一侧均固定连接有第二减震架,第二减震架的一侧转动连接有转动轴,转动轴的两端均固定连接有后轮,转动轴的一侧固定连接有第二带轮,第二带轮与同步带传动连接,且连接条的一侧固定连接有连接板。
进一步的:所述支撑板的上表面放置有收纳盒,收纳盒的一侧转动连接有密封板,密封板的一侧固定连接有把手,且收纳盒的多侧内壁固定连接有泡沫板,密封板的一侧固定连接有密封条。
在前述方案的基础上:所述支撑板的上表面固定连接有扶手架,扶手架的一侧套接有橡胶筒。
与现有技术相比,本实用新型提供了一种自由度高的苹果采摘机器人,具备以下有益效果:1、通过第一电动推杆、第二电动推杆、第三电动推杆、第一连接柱、第二连接柱和连接块之间的相互配合设置,能够根据苹果的高度来调节抓手的高度,从而方便对不同位置的苹果进行采摘,解决了在操作过程中,采摘机器人的自由度较低不方便调节的问题,达到了调节效果,方便苹果的采摘,提高了作业人员的使用效果。
2、通过安装块、固定柱和轴承之间的相互配合设置,能够根据不同位置的苹果来调节抓手的位置,从而可以对不同位置的苹果进行采摘作业,灵活性好,提高了装置的灵活性。
3、通过第一电机带动齿条与齿轮啮合,因此,使得滑动杆在固定块的一侧左右滑动,进而带动活动球移动,由于活动球与活动杆活动连接,因此,能够使得连接杆发生偏转,进而能够带动前轮发生左右偏转,从而可以对装置的移动方向进行调节,从而方便将装置移动至任意苹果树下,操作简单,方便移动,提高了装置的便捷性。
4、通过收纳盒、密封板和泡沫板的设置,收纳盒方便对苹果的收集,设计密封板,以便于对收纳盒起到密封的作用,进而对苹果进行保鲜,泡沫板的设置,能够在对苹果收集时对苹果进行防护,有效地防止苹果发生损坏,提高了装置的实用性。
附图说明
图1为本实用新型提出的一种自由度高的苹果采摘机器人实施例1的部分立体结构示意图;
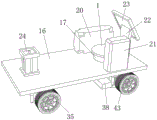
图2为本实用新型提出的一种自由度高的苹果采摘机器人实施例1的立体结构示意图;
图3为本实用新型提出的一种自由度高的苹果采摘机器人实施例1的局部侧视结构示意图;
图4为本实用新型提出的一种自由度高的苹果采摘机器人实施例1的局部剖视结构示意图;
图5为本实用新型提出的一种自由度高的苹果采摘机器人实施例2的立体结构示意图。
图中:1、安装块;2、第一支撑柱;3、第一连接柱;4、连接块;5、第二连接柱;6、第二支撑柱;7、抓手;8、第一支撑块;9、第一电动推杆;10、第二支撑块;11、第二电动推杆;12、第三支撑块;13、第三电动推杆;14、第一提手;15、第二提手;16、支撑板;17、连接环;18、轴承;19、固定柱;20、蓄电池;21、控制器;22、安装板;23、触控显示屏;24、第一电机;25、第一安装框;26、U形安装架;27、第一减震架;28、固定块;29、滑动杆;30、齿条;31、齿轮;32、活动球;33、活动杆;34、连接杆;35、前轮;36、第二安装框;37、连接条;38、连接板;39、第二电机;40、转动轴;41、第二减震架;42、同步带;43、后轮;44、收纳盒;45、密封板;46、把手;47、泡沫板;48、扶手架;49、橡胶筒。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例1
参照图1-图4,一种自由度高的苹果采摘机器人,包括安装块1和支撑板16,安装块1的上表面通过螺栓固定有第一支撑柱2,第一支撑柱2的一侧转动连接有第一连接柱3,第一支撑柱2的上表面通过螺栓固定有第一电动推杆9,第一连接柱3的一侧通过螺栓固定有第一支撑块8,第一支撑块8与第一电动推杆9转动连接,利用第一电动推杆9的伸缩性,可以对第一连接柱3的倾斜角度进行调节,且第一连接柱3的一侧通过螺栓固定有第一提手14,第一连接柱3的顶端转动连接有连接块4,第一连接柱3的一侧通过螺栓固定有第二支撑块10,第二支撑块10的上表面转动连接有第二电动推杆11,第二支撑块10对第二电动推杆11起到支撑的作用,第二电动推杆11的一端与连接块4转动连接,连接块4的两侧通过螺栓固定有第二连接柱5,利用第二电动推杆11的伸缩性,能够对连接块4的倾斜角度进行调节,进而可以调节第二连接柱5的倾斜角度,第二连接柱5的上表面通过螺栓固定有第三支撑块12,第三支撑块12的一侧转动连接有第三电动推杆13,且第二连接柱5的一侧通过螺栓固定有第二提手15,第二连接柱5的一端转动连接有第二支撑柱6,第二支撑柱6与第三电动推杆13转动连接,且第二支撑柱6的一侧通过螺栓固定有抓手7,利用第三电动推杆13可以带动第二支撑柱6在第二连接柱5的一端转动,从而将抓手7推送至苹果外部,第一电动推杆9、第二电动推杆11、第三电动推杆13、第一连接柱3、第二连接柱5和连接块4之间的相互配合设计,能够根据苹果的高度来调节抓手7的高度,从而方便对不同位置的苹果进行采摘,解决了在操作过程中,采摘机器人的自由度较低不方便调节的问题,达到了调节效果,方便苹果的采摘。
支撑板16的上表面通过螺栓固定有连接环17,连接环17的两侧套接有轴承18,安装块1的下表面通过螺栓固定有固定柱19,固定柱19与轴承18相插接,安装块1、固定柱19和轴承18之间的相互配合设计,能够根据不同位置的苹果来调节抓手7的位置,从而可以对不同位置的苹果进行采摘作业,灵活性好,支撑板16的上表分别通过螺栓固定有蓄电池20、控制器21和安装板22,安装板22的顶端通过螺栓固定有触控显示屏23,蓄电池20与控制器21和触控显示屏23电性连接,蓄电池20的设计,以便于对控制器21和第一电动推杆9、第二电动推杆11和第三电动推杆13进行供电,控制器21与第一电动推杆9、第二电动推杆11和第三电动推杆13电性连接,通过控制器21控制第一电动推杆9、第二电动推杆11和第三电动推杆13,能够在对苹果进行采摘作业时动作灵便、平稳避免苹果掉落,提高了采摘效率,支撑板16的上表面通过螺栓固定有第一电机24,第一电机24输出轴的一端键连接有齿轮31,支撑板16的下表面通过螺栓固定有两个固定块28,固定块28的一侧滑动连接有滑动杆29,滑动杆29的一端通过螺栓固定有活动球32,滑动杆29的另一端通过螺栓固定有齿条30,齿轮31与齿条30相啮合,第一电机24带动齿条30与齿轮31啮合,因此,使得滑动杆29在固定块28的一侧左右滑动,进而带动活动球32移动,且第一电机24与蓄电池20电性连接,支撑板16的下表面通过螺栓固定有两个第一安装框25,第一安装框25的底部通过螺栓固定有U形安装架26,U形安装架26的两侧通过螺栓固定有第一减震架27,第一减震架27能够在装置移动时起到减震的作用,第一减震架27的一侧通过螺栓固定有连接杆34,连接杆34的一端通过螺栓固定有活动杆33,活动杆33与活动球32转动连接,由于活动球32与活动杆33活动连接的设计,能够使得连接杆34发生偏转,且第一减震架27的一侧转动连接有固定轴,固定轴的两端均通过螺栓固定有前轮35,连接杆34带动第一减震架27发生偏转,进而带动前轮35发生左右偏转,从而可以对装置的移动方向进行调节,从而方便将装置移动至任意苹果树下,操作简单,方便移动,支撑板16的下表面通过螺栓固定有第二电机39,第二电机39输出轴的一端通过螺栓固定有第一带轮,第一带轮的一侧绕接有同步带42,通过第二电机39带动同步带42传动,且支撑板16的下表面通过螺栓固定有两个第二安装框36,第二安装框36的底部均通过螺栓固定有连接条37,连接条37的一侧均通过螺栓固定有第二减震架41,第二减震架41的一侧转动连接有转动轴40,转动轴40的两端均通过螺栓固定有后轮43,利用同步带42传递动力,故而,带动转动轴40转动,随即带动后轮43转动,且与前轮35相配合,将装置移动至苹果园树下,转动轴40的一侧通过螺栓固定有第二带轮,第二带轮与同步带42传动连接,且连接条37的一侧通过螺栓固定有连接板38。
本实施例工作原理:使用时,启动第二电机39,通过第二电机39带动同步带42传动,利用同步带42传递动力,故而,带动转动轴40转动,随即带动后轮43转动,且与前轮35相配合,将装置移动至苹果园树下,接着,通过手动操作触控显示屏23,将采摘信号发生至控制器21,利用控制器21控制第一电动推杆9,利用第一电动推杆9的伸缩性,可以对第一连接柱3的倾斜角度进行调节,接着,由控制器21控制第二电动推杆11,利用第二电动推杆11的伸缩性,能够对连接块4的倾斜角度进行调节,进而可以调节第二连接柱5的倾斜角度,从而可以根据苹果位置的高度调节抓手7的高度,紧接着,启动第三电动推杆13,利用第三电动推杆13可以带动第二支撑柱6在第二连接柱5的一端转动,从而将抓手7推送至苹果外部,此时,控制器21控制抓手7旋转,并且带动苹果轻轻旋转,即可使得苹果脱落,另外,通过手动转动第一连接柱3,在轴承18的作用下,使得固定柱19转动,进而带动安装块1转动,即可带动第一连接柱3转动,从而可以根据不同位置的苹果来调节抓手7的位置,灵活性好,当需要对下一颗苹果树上的苹果进行采摘时,需要移动装置,这时,启动第一电机24,通过第一电机24带动齿条30与齿轮31啮合,因此,使得滑动杆29在固定块28的一侧左右滑动,进而带动活动球32移动,由于活动球32与活动杆33活动连接,因此,能够使得连接杆34发生偏转,进而能够带动前轮35发生左右偏转,从而可以对装置的移动方向进行调节。
实施例2
参照图5,一种自由度高的苹果采摘机器人,包括支撑板16的上表面放置有收纳盒44,收纳盒44方便对苹果的收集,收纳盒44的一侧转动连接有密封板45,密封板45,以便于对收纳盒44起到密封的作用,进而对苹果进行保鲜,密封板45的一侧通过螺栓固定有把手46,且收纳盒44的多侧内壁粘接有泡沫板47,泡沫板47的设计,能够在对苹果收集时对苹果进行防护,有效地防止苹果发生损坏,密封板45的一侧粘接有密封条,密封条增加了收纳盒44的密封性,支撑板16的上表面通过螺栓固定有扶手架48,扶手架48,可以辅助装置移动,扶手架48的一侧套接有橡胶筒49,橡胶筒49增加了手与扶手架48的摩擦力。
本实施例工作原理:使用时,当苹果采摘后,由控制器21控制抓手7将采摘的苹果放置在收纳盒44内,当收纳盒44内的苹果装满时,将密封板45关闭,另外,通过手握扶手架48,可以辅助装置移动。
该文中出现的电器元件均与外界的主控器及220V市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (7)
1.一种自由度高的苹果采摘机器人,包括安装块(1)和支撑板(16),其特征在于,所述安装块(1)的上表面固定连接有第一支撑柱(2),第一支撑柱(2)的一侧转动连接有第一连接柱(3),第一支撑柱(2)的上表面固定连接有第一电动推杆(9),第一连接柱(3)的一侧固定连接有第一支撑块(8),第一支撑块(8)与第一电动推杆(9)转动连接,且第一连接柱(3)的一侧固定连接有第一提手(14),所述第一连接柱(3)的顶端转动连接有连接块(4),第一连接柱(3)的一侧固定连接有第二支撑块(10),第二支撑块(10)的上表面转动连接有第二电动推杆(11),第二电动推杆(11)的一端与连接块(4)转动连接,所述连接块(4)的两侧固定连接有第二连接柱(5),第二连接柱(5)的上表面固定连接有第三支撑块(12),第三支撑块(12)的一侧转动连接有第三电动推杆(13),且第二连接柱(5)的一侧固定连接有第二提手(15),所述第二连接柱(5)的一端转动连接有第二支撑柱(6),第二支撑柱(6)与第三电动推杆(13)转动连接,且第二支撑柱(6)的一侧固定连接有抓手(7)。
2.根据权利要求1所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的上表面固定连接有连接环(17),连接环(17)的两侧固定连接有轴承(18),安装块(1)的下表面固定连接有固定柱(19),固定柱(19)与轴承(18)相固定。
3.根据权利要求1所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的上表分别固定连接有蓄电池(20)、控制器(21)和安装板(22),安装板(22)的顶端固定连接有触控显示屏(23),蓄电池(20)与控制器(21)和触控显示屏(23)电性连接,控制器(21)与第一电动推杆(9)、第二电动推杆(11)和第三电动推杆(13)电性连接。
4.根据权利要求3所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的上表面固定连接有第一电机(24),第一电机(24)输出轴的一端固定连接有齿轮(31),支撑板(16)的下表面固定连接有两个固定块(28),固定块(28)的一侧滑动连接有滑动杆(29),滑动杆(29)的一端固定连接有活动球(32),滑动杆(29)的另一端固定连接有齿条(30),齿轮(31)与齿条(30)相啮合,且第一电机(24)与蓄电池(20)电性连接。
5.根据权利要求4所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的下表面固定连接有两个第一安装框(25),第一安装框(25)的底部固定连接有U形安装架(26),U形安装架(26)的两侧固定连接有第一减震架(27),第一减震架(27)的一侧固定连接有连接杆(34),连接杆(34)的一端固定连接有活动杆(33),活动杆(33)与活动球(32)转动连接,且第一减震架(27)的一侧转动连接有固定轴,固定轴的两端均固定连接有前轮(35)。
6.根据权利要求1所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的下表面固定连接有第二电机(39),第二电机(39)输出轴的一端固定连接有第一带轮,第一带轮的一侧绕接有同步带(42),且支撑板(16)的下表面固定连接有两个第二安装框(36),第二安装框(36)的底部均固定连接有连接条(37)。
7.根据权利要求1所述的一种自由度高的苹果采摘机器人,其特征在于:所述支撑板(16)的上表面放置有收纳盒(44),收纳盒(44)的一侧转动连接有密封板(45),密封板(45)的一侧固定连接有把手(46),且收纳盒(44)的多侧内壁固定连接有泡沫板(47),密封板(45)的一侧固定连接有密封条。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120258834.8U CN215345941U (zh) | 2021-01-29 | 2021-01-29 | 一种自由度高的苹果采摘机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120258834.8U CN215345941U (zh) | 2021-01-29 | 2021-01-29 | 一种自由度高的苹果采摘机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215345941U true CN215345941U (zh) | 2021-12-31 |
Family
ID=79622044
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120258834.8U Expired - Fee Related CN215345941U (zh) | 2021-01-29 | 2021-01-29 | 一种自由度高的苹果采摘机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215345941U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112470709A (zh) * | 2021-01-29 | 2021-03-12 | 河南工程学院 | 一种自由度高的苹果采摘机器人 |
-
2021
- 2021-01-29 CN CN202120258834.8U patent/CN215345941U/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112470709A (zh) * | 2021-01-29 | 2021-03-12 | 河南工程学院 | 一种自由度高的苹果采摘机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201823250U (zh) | 遥控自动网球拾球机 | |
| CN215345941U (zh) | 一种自由度高的苹果采摘机器人 | |
| WO2020239059A1 (zh) | 一种多功能草莓采摘机 | |
| CN215345946U (zh) | 一种具有远程控制功能的农作物采摘机器人 | |
| CN112470709A (zh) | 一种自由度高的苹果采摘机器人 | |
| CN207284258U (zh) | 一种使用方便的茶叶采摘装置 | |
| CN112655377A (zh) | 一种基于物联网的用于园林果实采摘的智能机械装置 | |
| CN210868786U (zh) | 一种农业用除草设备 | |
| CN112616444A (zh) | 一种采摘质量好的农业球果采摘机器人 | |
| CN218104386U (zh) | 一种食用菌采摘存放装置 | |
| CN218212067U (zh) | 一种环境监测土壤采集装置 | |
| CN212231885U (zh) | 一种ups整流数据采集装置 | |
| CN216362641U (zh) | 一种履带式农业智能采摘机器人 | |
| CN210016995U (zh) | 水果采摘机 | |
| CN203708846U (zh) | 一种水果采摘器 | |
| CN215345940U (zh) | 一种采摘质量好的农业球果采摘机器人 | |
| CN209897668U (zh) | 一种远程遥控可伸缩微触碰剪切式水果智能采摘车 | |
| CN212013615U (zh) | 一种小麦种植用除草间距调节装置 | |
| CN208762616U (zh) | 一种自动抓棉机 | |
| CN111903337A (zh) | 一种可以降低攀爬次数的椰子采摘设备 | |
| CN112492964A (zh) | 一种生态科技农业蔬菜种植用收割设备 | |
| CN116438980A (zh) | 一种珠芽魔芋辅助栽培机构 | |
| CN218295733U (zh) | 一种云智能模块型炉膛火化机 | |
| CN113813577B (zh) | 一种乒乓球自动捡拾设备 | |
| CN218941783U (zh) | 一种果实采摘器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20211231 |