CN213771027U - 一种自适应吊装装置 - Google Patents
一种自适应吊装装置 Download PDFInfo
- Publication number
- CN213771027U CN213771027U CN202022823922.6U CN202022823922U CN213771027U CN 213771027 U CN213771027 U CN 213771027U CN 202022823922 U CN202022823922 U CN 202022823922U CN 213771027 U CN213771027 U CN 213771027U
- Authority
- CN
- China
- Prior art keywords
- hoisting
- self
- platform
- lifting
- adaptive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Abstract
本发明公开了一种自适应吊装装置,包括下吊装平台(1)和安装平台(3),吊装平台(1)通过索具(2)吊装在安装平台(3)下方,在吊装平台(1)上侧安装同步升降机构(5),同步升降机构(5)通过电机控制多根升降螺杆升降,安装平台(3)下侧设有导向筒(6),当索具(2)的绳索在重力作用下垂直时,同步升降机构(5)的升降螺杆正对导向筒(6)中心。本发明通过设计同步升降机构与定位筒的配合,可有效转换吊装过程的刚柔结构,实现吊装过程的自动导正,满足吊装的自适应要求。
Description
技术领域
本发明涉及一种吊具。
背景技术
在吊装过程中,当需要将吊装装置对正吊装物进行吊装固定时,需人工手动定位或多次调整,使吊装装置的定位锥与吊装物的定位孔对正。吊装物品重量大、吊装物危险时,人工干预的对正存在较大危险性。多次调整对正花费时间长,吊装效率低。
发明内容
本发明要解决的技术问题是:针对吊装过程中定位锥与吊装物的定位孔对正困难的问题,提供了一种可以切换柔性和刚性状态的吊具。
本发明的技术方案:一种自适应吊装装置,包括下吊装平台和安装平台,吊装平台通过索具吊装在安装平台下方,在吊装平台上侧安装同步升降机构,同步升降机构通过电机控制多根升降螺杆升降,安装平台下侧设有导向筒,当索具的绳索在重力作用下垂直时,同步升降机构的升降螺杆正对导向筒中心。
设有四个索具布置在安装平台的四角,同步升降机构上有四根升降螺杆,升降螺杆位于索具内侧。
升降螺杆顶端有锥形顶尖,导向筒的内壁面呈锥形,锥度与锥形顶尖相同。
安装平台下侧设有两个导向筒和两个定位筒用于和四根升降螺杆配合,定位筒内壁面无锥度。
同步升降机构通过电机和涡轮蜗杆结构驱动四根升降螺杆。
吊装平台下侧两端各安装一个抱夹机构,抱夹机构通过电机和减速器驱动两个卡爪实现抱夹动作。
减速器的输出轴两端是螺杆结构,卡爪上端安装在滑槽中并套装在螺杆上。
减速器的输出轴通过轴承安装,可在轴向作一定距离窜动。
两个卡爪中间设有定位锥。
在卡爪抱夹、起吊或下放货物时四根升降螺杆收回,在货物被吊起后的移动过程中四根升降螺杆升起和导向筒或定位筒配合。
本发明的有益效果是:
通过设计同步升降机构与定位筒的配合,可有效转换吊装过程的刚柔结构,实现吊装过程的自动导正,满足吊装的自适应要求。
附图说明
图1是本发明整体结构图。
图2是图1的左视图。
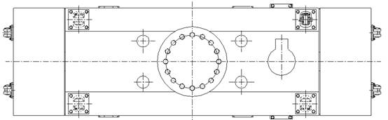
图3是图1的俯视图。
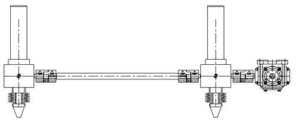
图4是本发明收拢状态下整体结构示意图。
图5是抱夹机构结构示意图。
图6是同步升降机构结构示意图。
图7是图6的俯视图。
图中的序号代表:1吊装平台; 2索具; 3安装平台; 4定位筒;
5 同步升降机构;6导向筒; 7 定位锥。
具体实施方式
包括下吊装平台1和安装平台3,吊装平台1通过索具2吊装在安装平台3下方,在吊装平台1上侧安装同步升降机构5,同步升降机构5通过电机控制多根升降螺杆升降,安装平台3下侧设有导向筒6,当索具2的绳索在重力作用下垂直时,同步升降机构5的升降螺杆正对导向筒6中心。设有四个索具2布置在安装平台3的四角,同步升降机构5上有四根升降螺杆,升降螺杆位于索具2内侧。升降螺杆顶端有锥形顶尖,导向筒6的内壁面呈锥形,锥度与锥形顶尖相同。安装平台3下侧设有两个导向筒6和两个定位筒4用于和四根升降螺杆配合,定位筒4内壁面无锥度,定位筒4主要用于吊装装置处于柔性状态下的限位及吊装装置处于收拢状态下的定位作用;导向筒6主要用于吊装装置转换刚性状态下的导向作用、吊装装置处于柔性状态下的限位作用及吊装装置处于收拢状态下的定位作用。同步升降机构5通过电机和涡轮蜗杆结构驱动四根升降螺杆,通过电机驱动,同步完成四角升降螺杆的伸出与收拢,完成吊装装置吊装过程中的刚、柔转换。
安装平台3是连接行车或吊车连接的一个过渡框架组件,其上方设计有一组连接螺纹孔,用于与上方行车或吊车连接。四角设计有吊装装置索具2的上安装孔,通过吊装装置索具2与吊装平台1连接。安装平台3采用钢板折弯组焊而成,满足吊装工作需要的强度和刚度。
吊装平台3下侧两端各安装一个抱夹机构,抱夹机构通过电机和减速器驱动两个卡爪实现抱夹动作。其工作原理为:电机经减速机带动两端的螺杆,分别驱动左右旋卡爪,实现同时张开或夹紧的动作,减速机输出轴可沿轴向适度窜动,满足自适应调整的需要。平台上平面有安装平台处理机支架和同步升降机构的安装埋板,用于安装平台处理机和同步升降机构。平台下方设计有吊装装索具的安装埋板,用于安装吊具索具,完成上、下平台的连接。平台骨架及夹紧机构骨架均采用钢板折弯焊接而成,满足吊装平台工作的强度和刚度。两个卡爪中间设有定位锥7。定位锥7分别装于两端夹紧机构总成的下部,锥体与吊装物适配器中部的锥孔尺寸协调,内部装有压簧,自然状态下锥体伸出安装座外,起吊吊装物时,锥体与锥孔结合,提供导引能力,锥体受柔性吊具结构重力作用缩回安装座内。
工作原理:
当吊装装置在空中准备抓吊装物前,将同步升降机构5的螺杆收拢(利用接近开关判断是否收拢),此时吊装装置索具2处于受力即绷直状态,也是吊装装置处于柔性状态,通过将吊装装置下移,利用定位锥7的导向导入吊装物的定位孔内,完成吊装装置的柔性抓物过程。将吊装装置上移,当吊装装置处于受力即吊装装置索具处于绷直状态时,将同步升降机构5的螺杆伸出与导向筒4贴合(利用接近开关判断是否伸出到位),此时吊装装置处于刚性吊装状态。当吊装装置将吊装物吊装在物品上方时,同步升降机构5的螺杆缩回,完成柔性放弹,即完成一次吊装装置的抓、放过程。该过程通过对同步升级机构的操作,完成前后左右四个方位的自适应吊装要求。
Claims (10)
1.一种自适应吊装装置,包括下吊装平台(1)和安装平台(3),其特征在于:吊装平台(1)通过索具(2)吊装在安装平台(3)下方,在吊装平台(1)上侧安装同步升降机构(5),同步升降机构(5)通过电机控制多根升降螺杆升降,安装平台(3)下侧设有导向筒(6),当索具(2)的绳索在重力作用下垂直时,同步升降机构(5)的升降螺杆正对导向筒(6)中心。
2.根据权利要求1所述自适应吊装装置,其特征在于:设有四个索具(2)布置在安装平台(3)的四角,同步升降机构(5)上有四根升降螺杆,升降螺杆位于索具(2)内侧。
3.根据权利要求2所述自适应吊装装置,其特征在于:升降螺杆顶端有锥形顶尖,导向筒(6)的内壁面呈锥形,锥度与锥形顶尖相同。
4.根据权利要求3所述自适应吊装装置,其特征在于:安装平台(3)下侧设有两个导向筒(6)和两个定位筒(4)用于和四根升降螺杆配合,定位筒(4)内壁面无锥度。
5.根据权利要求3所述自适应吊装装置,其特征在于:同步升降机构(5)通过电机和涡轮蜗杆结构驱动四根升降螺杆。
6.根据权利要求1-5任一项所述自适应吊装装置,其特征在于:吊装平台(1)下侧两端各安装一个抱夹机构,抱夹机构通过电机和减速器驱动两个卡爪实现抱夹动作。
7.根据权利要求6所述自适应吊装装置,其特征在于:减速器的输出轴两端是螺杆结构,卡爪上端安装在滑槽中并套装在螺杆上。
8.根据权利要求7所述自适应吊装装置,其特征在于:减速器的输出轴通过轴承安装,可在轴向作一定距离窜动。
9.根据权利要求8所述自适应吊装装置,其特征在于:两个卡爪中间设有定位锥(7)。
10.根据权利要求9所述自适应吊装装置,其特征在于:在卡爪抱夹、起吊或下放货物时四根升降螺杆收回,在货物被吊起后的移动过程中四根升降螺杆升起和导向筒(6)或定位筒(4)配合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022823922.6U CN213771027U (zh) | 2020-11-30 | 2020-11-30 | 一种自适应吊装装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022823922.6U CN213771027U (zh) | 2020-11-30 | 2020-11-30 | 一种自适应吊装装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN213771027U true CN213771027U (zh) | 2021-07-23 |
Family
ID=76895408
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022823922.6U Active CN213771027U (zh) | 2020-11-30 | 2020-11-30 | 一种自适应吊装装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN213771027U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113562601A (zh) * | 2021-07-28 | 2021-10-29 | 贵州航天特种车有限责任公司 | 一种自适应浮动卡紧装置 |
| CN113716444A (zh) * | 2021-08-26 | 2021-11-30 | 贵州航天特种车有限责任公司 | 一种四轴同步升降轻量化多功能吊具 |
-
2020
- 2020-11-30 CN CN202022823922.6U patent/CN213771027U/zh active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113562601A (zh) * | 2021-07-28 | 2021-10-29 | 贵州航天特种车有限责任公司 | 一种自适应浮动卡紧装置 |
| CN113716444A (zh) * | 2021-08-26 | 2021-11-30 | 贵州航天特种车有限责任公司 | 一种四轴同步升降轻量化多功能吊具 |
| CN113716444B (zh) * | 2021-08-26 | 2024-03-12 | 贵州航天特种车有限责任公司 | 一种四轴同步升降轻量化多功能吊具 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN213771027U (zh) | 一种自适应吊装装置 | |
| CN107081592B (zh) | 一种换挡换位组件的自动装配装置 | |
| CN113003378A (zh) | 吊点销轴式自动定位夹紧装置及吊装方法 | |
| CN100404406C (zh) | 混凝土管桩模具吊运用自动挂钩装置 | |
| CN101633479B (zh) | 铁路货车车体输送机械手 | |
| CN214114656U (zh) | 一种钢材的吊装设备 | |
| CN206928916U (zh) | 码垛管柱机械手 | |
| CN214217909U (zh) | 一种管桩吊具 | |
| CN210150620U (zh) | 一种液压提升夹爪 | |
| CN201632812U (zh) | 抽油机曲柄液力拉拔器 | |
| CN115258703A (zh) | 环锻件自动化生产线中的环锻件码垛装置 | |
| CN210968726U (zh) | 一种新能源电机转子轴承拉马器装置 | |
| CN212101659U (zh) | 一种钢筋笼吊运用夹钳装置 | |
| CN201151607Y (zh) | 一种壳圈式结构件吊运夹具 | |
| CN205889511U (zh) | 一种管桩模具自动揭模盖的夹具 | |
| CN108639955B (zh) | 一种用于船舶大型设备吊装定位的方法 | |
| CN214520202U (zh) | 一种多功能建筑机械臂 | |
| CN216613748U (zh) | 一种起重机用钢筋吊具 | |
| CN220502444U (zh) | 一种水利工程用管道吊装夹具 | |
| CN212532010U (zh) | 一种长钢轨自锁型专用吊具 | |
| CN218434527U (zh) | 一种可调节的装配式吊装吊具 | |
| CN211946008U (zh) | 一种建筑工程吊装装置 | |
| CN210735505U (zh) | 机器人升降手抓 | |
| CN214828453U (zh) | 吊装系统 | |
| CN220200637U (zh) | 一种铅锭拆垛手爪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |