CN212148587U - 一种快递运送机器人 - Google Patents
一种快递运送机器人 Download PDFInfo
- Publication number
- CN212148587U CN212148587U CN202020742658.0U CN202020742658U CN212148587U CN 212148587 U CN212148587 U CN 212148587U CN 202020742658 U CN202020742658 U CN 202020742658U CN 212148587 U CN212148587 U CN 212148587U
- Authority
- CN
- China
- Prior art keywords
- base
- plate
- cloud
- courier
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
本实用新型涉及物流设备技术领域,公开了一种快递运送机器人,包括行走机构、升降机构、伸缩机构和云筒;所述升降机构安装于行走机构,所述云筒套设于升降机构的外周,并与升降机构连接,所述云筒开有送货口,所述伸缩机构包括底板、伸缩板和推动组件;所述底板安装于云筒内,所述伸缩板通过推动组件安装于底板,所述伸缩板与送货口相对应。其有益效果在于:能够将快递物品推送至相应的自提柜或到户箱的储物格中,节省人力配送成本,提高配送效率。
Description
技术领域
本实用新型涉及物流设备技术领域,具体涉及一种快递运送机器人。
背景技术
随着快递行业的不断发展,快递业务量越来越大,各大快递公司需要投入大量的人力物力来完成快递物品的配送工作,不仅增加了快递行业的成本,而且快递物品的派送效率较低,虽然现在众多小区也设置有便于自提的蜂巢系统,但还是需要快递员将快递放入自提柜中。因此,亟需提供一种快递运送机器人,能够将快递物品放入自提柜,同时还能满足运送入户。
实用新型内容
本实用新型的目的是为了克服以上现有技术存在的不足,提供了一种快递运送机器人。
本实用新型的目的通过以下的技术方案实现:一种快递运送机器人,包括行走机构、升降机构、伸缩机构和云筒;所述升降机构安装于行走机构,所述云筒套设于升降机构的外周,并与升降机构连接,所述云筒开有送货口,所述伸缩机构包括底板、伸缩板和推动组件;所述底板安装于云筒内,所述伸缩板通过推动组件安装于底板,所述伸缩板与送货口相对应。
进一步地,所述推动组件包括第一滑轨、第一滑块和驱动器;所述第一滑轨安装于底板,所述第一滑块可滑动地安装于第一滑轨,所述伸缩板可滑动地安装于第一滑块,所述驱动器的输出端与第一滑块连接。
进一步地,所述驱动器包括第一主动齿轮和第一电机;所述第一滑块的一侧安装有齿条,所述第一电机的输出端与第一主动齿轮连接,所述齿条与第一主动齿轮啮合连接。
进一步地,所述底板设置有与齿条相对应的限位凸台。
进一步地,所述升降机构包括支撑座、支撑立柱、丝杠和驱动平台,所述支撑座的一端与行走机构连接,所述丝杠的丝杠螺母固定安装于支撑座的另一端,所述丝杠穿过丝杠螺母,所述驱动平台设置于丝杠的顶端,所述驱动平台的输出端与丝杠连接,所述支撑立柱安装于驱动平台,所述云筒套设于支撑座和驱动平台的外周,并与支撑立柱连接。
进一步地,所述驱动平台包括连接盘、第二主动齿轮、从动齿轮和第二电机;所述连接盘安装于丝杠的顶端,所述第二电机安装于连接盘以驱动第二主动齿轮转动,所述从动齿轮与第二主动齿轮啮合连接,所述从动齿轮与丝杠连接。
进一步地,还包括开闭门机构,所述开闭门机构包括箱门和电动推杆;所述箱门与送货口相对应,所述电动推杆安装于云筒内,所述电动推杆的输出端与箱门连接。
进一步地,所述云筒内设置有沿其高度方向间隔分布的支架,以将云筒内腔划分出至少两个储物层,所述底板安装于对应的储物层的底端,所述支架开有滑槽,所述箱门可滑动地设置在滑槽中。
进一步地,所述行走机构包括主基座、车轮,所述车轮相对安装于主基座的两侧,所述升降机构安装于主基座。
进一步地,所述行走机构还包括第一副基座、第二副基座和两个转向轮;所述第一副基座和第二副基座相对设置于主基座的另外两侧,所述第一副基座与主基座固定连接,所述第二副基座与主基座铰接,所述转向轮分别安装于第一副基座和第二副基座。
进一步地,所述行走机构还包括基板和连接板;所述连接板与第二副基座铰接,所述基板的一端与第一副基座铰接,所述基板的另一端可滑动地安装于连接板,所述升降机构安装于基板。
本实用新型相对于现有技术具有如下优点:
1、本实用新型快递运送机器人,通过设置行走机构、升降机构、伸缩机构和云筒,能够实现行进、升降、旋转、推送等功能,能够将运送物品,推送至相应的自提柜或到户箱的储物格中,节省人力配送成本,提高配送效率。
2、本实用新型的快递运送机器人,其伸缩机构采用倍速链的设计,结构合理,节省空间,能够将物品准确推送至储物格中。
3、本实用新型的快递运送机器人,其行走机构的中的第二副基座与主基座之间、基板与第一副基座之间以及连接板与第二副基座之间均采用铰接,基板106与连接板之间采用滑轨连接,此设置能够起到减震的效果,防止颠簸损坏云筒中的物品。
附图说明
构成本申请的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
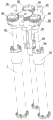
图1示出了根据本实用新型的快递运送机器人的结构示意图。
图2示出了根据本实用新型的快递运送机器人的侧视图;
图3示出了根据本实用新型中的推动组件的结构示意图;
图4示出了根据本实用新型中的升降机构的结构示意图;
图5示出了根据本实用新型中的开闭门机构的结构示意图;
图6示出了根据本实用新型中的行走机构的第一角度的结构示意图;
图7示出了根据本实用新型中的行走机构的第二角度的结构示意图;
图8示出了根据本实用新型中的行走机构的主视图;
图9示出了根据本实用新型中的行走机构的侧视图;
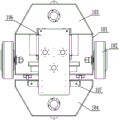
图10示出了根据本实用新型中的行走机构的俯视图;
图中,1为行走机构;101为主基座;102为车轮;103为第一副基座;104为第二副基座;105为转向轮;106为基板;107为连接板;108为导轨;2为伸缩机构;201为底板;202为伸缩板;203为第一滑轨;204为第一滑块;205为第一主动齿轮;206为第一电机;207为齿条;208为限位凸台;3为升降机构;301为支撑座;302为支撑立柱;303为丝杠;304为连接盘;305为第二主动齿轮;306为从动齿轮;307为第二电机;308为丝杠螺母;4为云筒;401为送货口;402为支架;403为滑槽;5为开闭门机构;501为箱门;502为电动推杆。
具体实施方式
下面结合附图和实施例对本实用新型作进一步说明。
如图1-图2所示的快递运送机器人,包括行走机构1、伸缩机构2、升降机构3和云筒4;所述升降机构3安装于行走机构1,所述云筒4套设于升降机构3的外周,并与升降机构3连接,所述云筒4开有送货口401,所述伸缩机构2包括底板201、伸缩板202和推动组件;所述底板201安装于云筒4内,所述伸缩板202通过推动组件安装于底板201,所述伸缩板202与送货口401相对应。送货口401的数量根据云筒4的运载能力布置。本快递运送机器人,通过行走机构1能够完成行进、旋转等动作,对外界环境适应性强。升降机构3能够带动云筒4升降,以使云筒的送货口与自提柜或到户箱的储物格相对应。伸缩机构2安装在云筒4内部,并跟随云筒4升降,能够将云筒4内部的物品通过送货口401推出至自提柜或到户箱的储物格中。云筒上装有短距离激光雷达和RGB结构光设备,能确保运送机器人行进过程中的安全性,还能精确定位自提柜或到户箱的位置。
如图3所示,所述推动组件包括第一滑轨203、第一滑块204和驱动器;所述第一滑轨203安装于底板201,所述第一滑块204可滑动地安装于第一滑轨203,所述伸缩板202可滑动地安装于第一滑块204,所述驱动器的输出端与第一滑块204连接。底板201与伸缩板202之间设计为倍速机构,将放置在伸缩板202上的物品,轻松推送对应的储物格中。具体使用时,可在伸缩板202上放置载物盒,物品置于载物盒中,驱动器每次推动时,载物盒和物品同时进入到储物格中。
所述驱动器包括第一主动齿轮205和第一电机206;所述第一滑块204的一侧安装有齿条207,所述第一电机206的输出端与第一主动齿轮205连接,所述齿条207与第一主动齿轮205啮合连接。第一电机206带动第一主动齿轮205转动,从而带动与齿条207连接的第一滑块204沿第一滑轨203滑动,同时伸缩板202也沿第一滑块204滑动,以此形成倍速机构。此设置结构简单,节省空间。
所述底板201设置有与齿条207相对应的限位凸台208。设置限位凸台208可以限制第一滑块204行程,避免第一滑块204滑出第一滑轨203,提高伸缩机构2的安全性。
如图4所示,所述升降机构3包括支撑座301、支撑立柱302、丝杠303和驱动平台,所述支撑座301的一端与行走机构1中的基板106连接,所述丝杠303的丝杠螺母固定安装于支撑座301的另一端,所述丝杠303穿过丝杠螺母308,所述驱动平台设置于丝杠303的顶端,所述驱动平台的输出端与丝杠303连接,所述支撑立柱302安装于驱动平台,所述云筒4套设于支撑座301和驱动平台的外周,并与支撑立柱302连接。支撑座301内部中空,丝杠在转动过程中,同时进入支撑座301的内腔,进而调节支撑立柱302与支撑座301之间的距离,带动云筒4的升降。
所述驱动平台包括连接盘304、第二主动齿轮305、从动齿轮306和第二电机307;所述连接盘304安装于丝杠303的顶端,所述第二电机307安装于连接盘304以驱动第二主动齿轮305转动,所述从动齿轮306与第二主动齿轮305啮合连接,所述从动齿轮306与丝杠303连接。丝杠303的顶端与从动齿轮306的内圈固定连接。第二电机307驱动第二主动齿轮305转动,丝杠303跟随从动齿轮306转动,同时丝杠300的底端进入支撑座301的内腔,实现云筒4的升降。
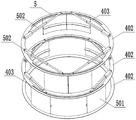
如图5所示,还包括开闭门机构5,所述开闭门机构5包括箱门501和电动推杆502;所述箱门501与送货口401相对应,所述电动推杆502安装于云筒4内,所述电动推杆502的输出端与箱门501连接。通过设置电动推杆502控制箱门的闭合,结构简单,节省云筒4内部空间。
所述云筒4内设置有沿其高度方向间隔分布的支架402,以将云筒4内腔划分出至少两个储物层,所述底板201安装于对应的储物层的底端,所述支架402开有滑槽403,所述箱门501可滑动地设置在滑槽403中。如图1和图5所示,支架402的形状与云筒4相配合,本实施例中的云筒4呈圆筒状,支架402呈圆环形,最底端的支架402位于云筒4的最底端,顶端的支架402位于云筒4的顶端,伸缩机构2中的底板201与储物层底端的支架402连接,同一储物层对应多个送货口401和伸缩机构2,同一储物层的各底板201之间为升降机构3留出相应的空间,便于云筒4升降。为了节省云筒4内空间,将电动推杆502也安装在支架402上。储物层的数量根据云筒4的运载能力布置。
如图6-图10所示,所述行走机构1包括主基座101、车轮102,所述车轮102相对安装于主基座101的两侧,所述升降机构3的支撑座301安装于主基座101。行走机构1能带动本运送机器人行进,将云筒4中的物品配送至指定位置。
所述行走机构1还包括第一副基座103、第二副基座104和两个转向轮105;所述第一副基座103和第二副基座104相对设置于主基座101的另外两侧,所述第一副基座103与主基座101固定连接,所述第二副基座104与主基座101铰接,所述转向轮105分别安装于第一副基座103和第二副基座104。转向轮105对应有转向电机,利用转向电机驱动转向轮转向,从而实现本运送机器人的旋转。
所述行走机构1还包括基板106和连接板107;所述连接板107安装于第二副基座104,并与第二副基座104铰接,所述基板106的一端与第一副基座103铰接,所述基板106的另一端可滑动地安装于连接板107,所述升降机构3的支撑座301安装于基板106。第二副基座104与主基座101之间、基板106与第一副基座103之间以及连接板107与第二副基座104之间均采用铰接,基板106与连接板107之间采用滑轨连接,此设置能够起到减震的效果,防止颠簸损坏云筒4中的物品,同时提高运送机器人的路面适应性。
本运送机器人搭载现有的控制系统,人工将需要配送的快递物品放置到云筒中,随后本运送机器人可将快递物品运送到自提柜或到户箱的储物格中,节省人力,有效提高快递配送效率。
上述具体实施方式为本实用新型的优选实施例,并不能对本实用新型进行限定,其他的任何未背离本实用新型的技术方案而所做的改变或其它等效的置换方式,都包含在本实用新型的保护范围之内。
Claims (10)
1.一种快递运送机器人,其特征在于:包括行走机构、升降机构、伸缩机构和云筒;所述升降机构安装于行走机构,所述云筒套设于升降机构的外周,并与升降机构连接,所述云筒开有送货口,所述伸缩机构包括底板、伸缩板和推动组件;所述底板安装于云筒内,所述伸缩板通过推动组件安装于底板,所述伸缩板与送货口相对应。
2.根据权利要求1所述的快递运送机器人,其特征在于:所述推动组件包括第一滑轨、第一滑块和驱动器;所述第一滑轨安装于底板,所述第一滑块可滑动地安装于第一滑轨,所述伸缩板可滑动地安装于第一滑块,所述驱动器的输出端与第一滑块连接。
3.根据权利要求2所述的快递运送机器人,其特征在于:所述驱动器包括第一主动齿轮和第一电机;所述第一滑块的一侧安装有齿条,所述第一电机的输出端与第一主动齿轮连接,所述齿条与第一主动齿轮啮合连接。
4.根据权利要求1所述的快递运送机器人,其特征在于:所述升降机构包括支撑座、支撑立柱、丝杠和驱动平台,所述支撑座的一端与行走机构连接,所述丝杠的丝杠螺母固定安装于支撑座的另一端,所述驱动平台设置于丝杠的顶端,所述驱动平台的输出端与丝杠连接,所述支撑立柱安装于驱动平台,所述云筒套设于支撑座和驱动平台的外周,并与支撑立柱连接。
5.根据权利要求4所述的快递运送机器人,其特征在于:所述驱动平台包括连接盘、第二主动齿轮、从动齿轮和第二电机;所述连接盘安装于丝杠的顶端,所述第二电机安装于连接盘以驱动第二主动齿轮转动,所述从动齿轮与第二主动齿轮啮合连接,所述从动齿轮与丝杠连接。
6.根据权利要求1所述的快递运送机器人,其特征在于:还包括开闭门机构,所述开闭门机构包括箱门和电动推杆;所述箱门与送货口相对应,所述电动推杆安装于云筒内,所述电动推杆的输出端与箱门连接。
7.根据权利要求6所述的快递运送机器人,其特征在于:所述云筒内设置有沿其高度方向间隔分布的支架,以将云筒内腔划分出至少两个储物层,所述底板安装于对应的储物层的底端,所述支架开有滑槽,所述箱门可滑动地设置在滑槽中。
8.根据权利要求1所述的快递运送机器人,其特征在于:所述行走机构包括主基座、车轮,所述车轮相对安装于主基座的两侧,所述升降机构安装于主基座。
9.根据权利要求8所述的快递运送机器人,其特征在于:所述行走机构还包括第一副基座、第二副基座和两个转向轮;所述第一副基座和第二副基座相对设置于主基座的另外两侧,所述第一副基座与主基座固定连接,所述第二副基座与主基座铰接,所述转向轮分别安装于第一副基座和第二副基座。
10.根据权利要求9所述的快递运送机器人,其特征在于:所述行走机构还包括基板和连接板;所述连接板与第二副基座铰接,所述基板的一端与第一副基座铰接,所述基板的另一端可滑动地安装于连接板,所述升降机构安装于基板。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020742658.0U CN212148587U (zh) | 2020-05-08 | 2020-05-08 | 一种快递运送机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020742658.0U CN212148587U (zh) | 2020-05-08 | 2020-05-08 | 一种快递运送机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212148587U true CN212148587U (zh) | 2020-12-15 |
Family
ID=73709783
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202020742658.0U Expired - Fee Related CN212148587U (zh) | 2020-05-08 | 2020-05-08 | 一种快递运送机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212148587U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114310953A (zh) * | 2021-12-30 | 2022-04-12 | 重庆特斯联智慧科技股份有限公司 | 一种物流机器人、物流缓存系统及其运行方法 |
| WO2024113739A1 (zh) * | 2022-11-30 | 2024-06-06 | 深圳一清创新科技有限公司 | 一种配送机器人 |
-
2020
- 2020-05-08 CN CN202020742658.0U patent/CN212148587U/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114310953A (zh) * | 2021-12-30 | 2022-04-12 | 重庆特斯联智慧科技股份有限公司 | 一种物流机器人、物流缓存系统及其运行方法 |
| WO2024113739A1 (zh) * | 2022-11-30 | 2024-06-06 | 深圳一清创新科技有限公司 | 一种配送机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN212148587U (zh) | 一种快递运送机器人 | |
| CN110884816A (zh) | 一种智能仓储自动存储堆垛取放装置 | |
| CN211768046U (zh) | 一种智能仓储自动存储堆垛取放装置 | |
| CN202399248U (zh) | 可升降的多功能设备维修专用车 | |
| CN113734680B (zh) | 一种基于大数据的智能物料仓储管理系统 | |
| CN215438103U (zh) | 一种组合四向穿梭车的组合式堆垛机 | |
| CN109292691A (zh) | 一种轻量型叉车 | |
| CN110182719A (zh) | 一种高自由度的叉车装置 | |
| CN217025212U (zh) | 一种叉车agv | |
| CN204453521U (zh) | 车辆或货物的立体存取装置 | |
| CN210236496U (zh) | 大型货车无托盘自动装车机 | |
| CN109877799B (zh) | 一种全向移动式集装箱码垛机器人 | |
| CN105819181A (zh) | 升降式运载车 | |
| CN105883675A (zh) | 一种液压助力转向式前移叉车 | |
| CN105464419A (zh) | 具有激光定距功能的地下自行车库 | |
| CN108756377B (zh) | 一种复合式三轴移动停车装置 | |
| CN211139282U (zh) | 一种周向布置式多车道换电站 | |
| CN209554728U (zh) | 一种轻量型叉车 | |
| CN208137549U (zh) | 共享汽车升降横移式泊车设备 | |
| CN211997295U (zh) | 一种轻型多向堆垛agv | |
| CN208473393U (zh) | 一种三维立体车库 | |
| CN210976784U (zh) | 一种停车运输台 | |
| CN211970589U (zh) | 一种涡轮蜗杆驱动式的搬运设备 | |
| CN108678456B (zh) | 无避让立体车库 | |
| CN202414602U (zh) | 智能材料库 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20201215 Termination date: 20210508 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |