CN211335075U - 一种周转车及周转车的升降装置 - Google Patents
一种周转车及周转车的升降装置 Download PDFInfo
- Publication number
- CN211335075U CN211335075U CN201922065446.3U CN201922065446U CN211335075U CN 211335075 U CN211335075 U CN 211335075U CN 201922065446 U CN201922065446 U CN 201922065446U CN 211335075 U CN211335075 U CN 211335075U
- Authority
- CN
- China
- Prior art keywords
- lifting
- lift
- connecting rod
- driving
- link
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Abstract
本申请公开了一种周转车的升降装置,包括升降承载架、第一连接座、第二连接座、升降连杆组件和升降驱动组件。升降承载架用于承载活动平台,第一连接座与升降承载架连接,第二连接座用于与旋转承载架连接。升降连杆组件与第一连接座和第二连接座连接,升降连杆组件被驱动时能够带动第一连接座上升或下降。升降驱动组件用于驱动升降连杆组件运动。由于增设了周转车的升降装置,在旋转活动平台时,通过周转车的升降装置改变活动平台的高度,使得活动平台与台板位于不同的水平位置,有效防止活动平台旋转时碰撞台板。
Description
技术领域
本申请涉及周转车技术领域,特别涉及一种周转车及周转车的升降装置。
背景技术
台板印刷机是一种能在台板上自动运动完成印刷任务的设备。现有的台板印刷机,一台机器在同一时间只能完成一个颜色的印刷,要印刷多色时,需要更换网版。因台板长度有限,能够排放的承印物数量有限,每当印刷完成一个颜色,就需要更换一次网版,这样不仅操作麻烦,而且因更换网版和刮刀而浪费时间,降低生产效率。
针对因频繁更换网版而降低生产效率的问题,有的设备厂家在流水线台板的旁边设置了直线轨道和周转平台,使得台板印刷机能够在多个台板之间循环周转,以减少更换网版的次数。为了更加灵活地调度台板朝向不同的印刷机,有的周转平台具有旋转功能,通过带动台板印刷机旋转改变台板印刷机的朝向。但是,周转平台旋转时容易与台板发生碰撞,故而有待改进。
实用新型内容
本申请提供一种周转车及周转车的升降装置,用以解决活动平台旋转时容易与台板发生碰撞的问题。
本申请所提供的一种周转车及周转车的升降装置,包括:
升降承载架,其用于承载活动平台;
第一连接座,其与升降承载架连接;
第二连接座,其用于与承载物连接;
升降连杆组件,其与第一连接座和第二连接座连接,所述升降连杆组件被驱动时能够带动第一连接座上升或下降;
以及升降驱动组件,其用于驱动升降连杆组件运动。
作为所述周转车的升降装置的进一步改进,
所述升降连杆组件包括第一连杆、第二连杆、第三连杆和第四连杆,所述第一连杆具有相对设置的第一端和第二端,所述第二连杆具有相对设置的第一端和第二端,所述第一连杆的第一端与第一连接座转动连接,所述第一连杆的第二端与第二连杆的第一端转动连接,所述第二连杆的第二端与第二连接座转动连接;
所述第三连杆具有相对设置的第一端和第二端,所述第四连杆具有相对设置的第一端和第二端,所述第三连杆的第一端与第一连接座转动连接,所述第三连杆的第二端与第四连杆的第一端转动连接,所述第四连杆的第二端与第二连接座转动连接。作为所述周转车的升降装置的进一步改进,
所述升降驱动组件包括升降驱动电机、驱动丝杆、第一驱动轴和第二驱动轴,所述第一驱动轴与第二驱动轴相对设置,所述第一驱动轴与第一连杆的第二端和第二连杆的第一端转动连接,所述第二驱动轴与第三连杆的第二端和第四连杆的第一端转动连接;
所述升降驱动电机与第一驱动轴固接,所述驱动丝杆沿水平方向设置,所述驱动丝杆与升降驱动电机的输出端连接,所述升降驱动电机用于驱动所述驱动丝杆转动,所述第二驱动轴套设于驱动丝杆,并与驱动丝杆螺纹连接,所述驱动丝杆被驱动时能够带动第二驱动轴在驱动丝杆上运动,以实现对升降连杆组件的驱动。
作为所述周转车的升降装置的进一步改进,
所述升降连杆组件设有两个,两个升降连杆组件相对设置,所述第一驱动轴的一端与一个升降连杆组件的第一连杆的第二端和第二连杆的第一端转动连接,所述第一驱动轴的另一端与另一个升降连杆组件的第一连杆的第二端和第二连杆的第一端转动连接;
所述第二驱动轴的一端与一个升降连杆组件的第三连杆的第二端和第四连杆的第一端转动连接,所述第二驱动轴的另一端与另一个升降连杆组件的第三连杆的第二端和第四连杆的第一端转动连接,所述第二驱动轴被驱动时,能够带动两个升降连杆组件运动。
作为所述周转车的升降装置的进一步改进,所述第一驱动轴和第二驱动轴包括梯形螺母轴,所述梯形螺母轴具有自锁功能。
作为所述周转车的升降装置的进一步改进,还包括升降传感器、高位感应板和低位感应板,所述升降传感器用于与活动平台连接,所述高位感应板和低位感应板的高度位置固定,所述升降传感器运动至与高位感应板相对的位置时产生高位感应信号,所述升降传感器运动至与低位感应板相对的位置时产生低位感应信号。
作为所述周转车的升降装置的进一步改进,还包括升降导杆,所述升降导杆的一端与升降承载架连接,另一端用于与旋转承载架连接,所述升降导杆用于对升降承载架的升降运动起导向作用。
作为所述周转车的升降装置的进一步改进,还包括保护轴套,所述保护轴套套设在升降导杆下部,用于在其他支撑结构断裂时支撑所述升降承载架。
作为所述周转车的升降装置的进一步改进,还包括辅助气弹簧,所述辅助气弹簧一端与升降承载架连接,另一端用于与旋转承载架连接,以支撑所述升降承载架。
本申请所提供的一种周转车,包括如上述任一项所述的周转车的升降装置。
本申请的有益效果:
本申请所提供的一种周转车的升降装置,包括升降承载架、第一连接座、第二连接座、升降连杆组件和升降驱动组件。升降承载架用于承载活动平台,第一连接座与升降承载架连接,第二连接座用于与旋转承载架连接。升降连杆组件与第一连接座和第二连接座连接,升降连杆组件被驱动时能够带动第一连接座上升或下降。升降驱动组件用于驱动升降连杆组件运动。由于增设了周转车的升降装置,在旋转活动平台时,通过周转车的升降装置改变活动平台的高度,使得活动平台与台板位于不同的水平位置,有效防止活动平台旋转时碰撞台板。
附图说明
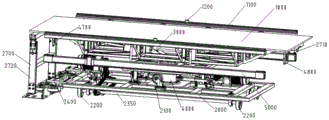
图1为本申请一种实施例中周转车一视角的结构示意图;
图2为本申请一种实施例中周转车另一视角的结构示意图;
图3为本申请一种实施例中运动装置的结构示意图;
图4为本申请一种实施例中升降装置的结构示意图;
图5为本申请一种实施例中升降连杆组件和升降驱动组件的结构示意图;
图6为本申请一种实施例中旋转装置的结构示意图;
图7为本申请一种实施例中摩擦滚轮和调节组件的结构示意图。
附图标记:1000、活动平台;
1100、印刷机行走轨道;1200、印刷机定位马仔;
2000、运动装置;
2100、行走底盘;2200、行走轮;2300、行走驱动组件;2310、行走驱动电机;2320、行走主动链轮;2330、行走从动链轮;2340、行走传动链;2350、行走传动转轴;2360、张紧轮;2400、导向机构;2410、导向连接件;2420、导向滚轮;2430、导向板;2500、行走传感器;2600、行走感应板;2700、定位机构;2710、活动定位柱;2720、定位架;2721、定位支撑柱;2722、定位连接柱;2723、定位连接板;
3000、升降装置;
3100、升降承载架;3110、上安装板;3120、下安装板;3200、第一连接座;3300、第二连接座;3400、升降连杆组件;3410、第一连杆;3411、第一连杆的第一端;3412、第一连杆的第二端;3420、第二连杆;3421、第二连杆的第一端;3422、第二连杆的第二端;3430、第三连杆;3431、第三连杆的第一端;3432、第三连杆的第二端;3440、第四连杆;3441、第四连杆的第一端;3442、第四连杆的第二端;3500、升降驱动组件;3510、升降驱动电机;3520、驱动丝杆;3530、第一驱动轴;3540、第二驱动轴;3550、升降导杆;3560、保护轴套;3570、辅助气弹簧;
4000、旋转装置;
4100、旋转承载架;4110、加强筋;4120、加强板;4200、摩擦滚轮;4300、旋转驱动组件;4310、旋转驱动电机;4320、主动摩擦链轮;4330、从动摩擦链轮;4340、摩擦转轴;4350、摩擦传动链;4400、调节组件;4410、摩擦固定座;4411、摩擦通孔;4420、摩擦承载板;4430、摩擦轴安装座;4440、摩擦抵接块;4441、摩擦螺孔;4450、调节弹簧;4460、调节螺母;4500、承载转轴;4600、支撑轮组件;4610、支撑滚轮;4620、支撑轮座;4700、第一旋转传感器;4800、第二旋转传感器;
5000、移动滑线装置;
5100、固定支架。
具体实施方式
下面通过具体实施方式结合附图对本申请作进一步详细说明,其中不同实施方式中类似元件采用了相关联的类似的元件标号。在以下的实施方式中,很多细节描述是为了使得本申请能被更好的理解。然而,本领域技术人员可以毫不费力的认识到,其中部分特征在不同情况下是可以省略的,或者可以由其他元件、材料、方法所替代。在某些情况下,本申请相关的一些操作并没有在说明书中显示或者描述,这是为了避免本申请的核心部分被过多的描述所淹没,而对于本领域技术人员而言,详细描述这些相关操作并不是必要的,他们根据说明书中的描述以及本领域的一般技术知识即可完整了解相关操作。
另外,说明书中所描述的特点、操作或者特征可以以任意适当的方式结合形成各种实施方式。同时,方法描述中的各步骤或者动作也可以按照本领域技术人员所能显而易见的方式进行顺序调换或调整。因此,说明书和附图中的各种顺序只是为了清楚描述某一个实施例,并不意味着是必须的顺序,除非另有说明其中某个顺序是必须遵循的。
本文中为部件所编序号本身,例如“第一”、“第二”等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本申请所说“连接”、“联接”,如无特别说明,均包括直接和间接连接(联接)。
本实施例提供一种周转车。
请参考图1和2,该周转车包括活动平台1000、运动装置2000、升降装置3000、旋转装置4000和移动滑线装置5000。
结合图3,运动装置2000包括行走底盘2100、行走轮2200、行走驱动组件2300和导向机构2400,通过行走驱动组件2300驱动行走底盘2100运动,通过导向机构2400对行走底盘2100的运动起导向作用,无需铺设轨道,解决了铺设地面轨道阻碍物料运输、行人通过和地面轨道需要调水平的问题。由于增设了旋转装置4000,使得周转车可以改变台板印刷机的朝向,方便于灵活调度朝向不同的台板印刷机。由于增设了升降装置3000,在旋转活动平台1000时,通过升降装置3000改变活动平台1000的高度,使得活动平台1000与台板位于不同的水平位置,有效防止活动平台1000旋转时碰撞台板。
活动平台1000用于承载台板印刷机。
请参考图1和2,在一种实施例中,活动平台1000顶面的相对两侧设置有印刷机行走轨道1100,用于供台板印刷机行走,印刷机行走轨道1100的一侧设有印刷机定位马仔1200,印刷机定位马仔1200用于与印刷机定位柱配合,以对台板印刷机起定位作用。
请参考图1和2,运动装置2000包括行走底盘2100、行走轮2200、行走驱动组件2300和导向机构2400。
请参考图1,行走底盘2100用于起承载作用。
请参考图1和2,在一种实施例中,行走轮2200设置在行走底盘2100底部,并与行走底盘2100转动连接。具体的,行走轮2200通过行走传动转轴2350实现与行走底盘2100的转动连接。
请参考图1和2,行走驱动组件2300用于驱动行走轮2200转动,以带动行走底盘2100沿直线在多个台板间运动。
请参考图1-3,在一种实施例中,行走驱动组件2300包括行走驱动电机2310、行走主动链轮2320、行走从动链轮2330、行走传动链2340和行走传动转轴2350。
请参考图3,行走驱动电机2310与行走底盘2100固接,行走主动链轮2320与行走驱动电机2310的输出端连接,行走驱动电机2310用于驱动行走主动链轮2320转动。行走传动转轴2350与行走底盘2100的底部转动连接,行走传动转轴2350的两端均设有行走轮2200,行走从动链轮2330与行走传动转轴2350固接,行走传动链2340将行走主动链轮2320和行走从动链轮2330连接,以使行走主动链轮2320被驱动时,能够带动行走传动转轴2350和行走轮2200转动。
当需要驱动行走底盘2100运动时,启动行走驱动电机2310,通过行走驱动电机2310驱动行走主动链轮2320转动,带动行走从动链轮2330和行走传动转轴2350运动,进而带动行走轮2200转动,实现行走底盘2100的行走。
在其他实施例中,行走驱动组件2300也可以采用带传动结构或齿轮传动结构实现对行走轮2200的驱动。
请参考图1-3,在一种实施例中,行走传动转轴2350设置有两个,两个行走传动转轴2350相互平行,两个行走传动转轴2350上均固设有行走从动链轮2330,行走传动链2340将行走主动链轮2320和两个行走从动链轮2330连接。使得行走驱动电机2310能够同时驱动两个行走传动转轴2350转动。
在其他实施例中,行走传动转轴2350还可以设有三个、四个等,可以根据承重和驱动的实际要求灵活设置传动转轴的数量。
请参考图3,在一种实施例中,行走驱动组件2300还包括张紧轮2360,张紧轮2360与行走底盘2100转动连接,并与行走传动链2340啮合,用于张紧行走传动链2340。通过张紧轮2360将行走传动链2340张紧。
请参考图1-3,在一种实施例中,导向机构2400包括第一导向件和第二导向件。
请参考图1-3,第一导向件与行走底盘2100连接,第二导向件沿行走底盘2100的运动路径间隔设置,行走底盘2100被驱动时,能够带动第一导向件与第二导向件配合,以对行走底盘2100的运动起导向作用。
通过第一导向件和第二导向件的配合,实现对行走底盘2100运动的导向,有利于保持行走底盘2100沿直线运动。第二导向件间隔设置,在物料运输和行人行走的通道处可以不设置第二导向件,使得第二导向件不会阻碍物料运输和行人通过。
请参考图1-3,在一种实施例中,第一导向件包括导向轮组件,第二导向件包括导向板2430,导向板2430与行走底盘2100的运动路径平行,导向轮组件与导向板2430配合时,能够在导向板2430上滚动。通过导向轮组件在导向板2430上的滚动,实现对行走底盘2100运动的导向。
请参考图3,在一种实施例中,导向轮组件包括导向连接件2410和至少两个导向滚轮2420,导向连接件2410一侧与行走底盘2100固接,另一侧与导向滚轮2420转动连接,导向滚轮2420用于在导向板2430的相对两侧滚动,以限制行走底盘2100垂直于导向板2430方向的运动。导向轮组件与导向板2430配合时,导向滚轮2420从导向板2430的两侧夹住导向板2430,限制行走底盘2100不在垂直于导向板2430的方向运动,有利于保持行走底盘2100沿直线运动。
请参考图1-3,在一种实施例中,导向轮组件间隔设置有两个,每个导向轮组件均包括四个导向滚轮2420。在其他实施例中,导向轮组件也可以成设置一个、三个等,可以根据行走底盘2100的尺寸和导向要求灵活设置导向轮组件的数量,每个导向轮组件可以包括两个、六个或其他合适数量的导向滚轮2420。
请参考图1-3,在一种实施例中,运动装置2000还包括行走传感器2500和行走感应板2600,行走传感器2500与行走底盘2100朝向导向板2430的一侧固接,行走感应板2600与导向板2430朝向行走底盘2100的一侧固接,行走传感器2500用于在其运动至与行走感应板2600相对的位置时产生行走感应信号。
请参考图1-3,在一种实施例中,运动装置2000还包括定位机构2700,定位机构2700包括活动定位柱2710和定位架2720,活动定位柱2710与行走底盘2100活动式连接,定位架2720用于设置在台板的一侧,定位架2720具有定位凹槽,定位凹槽用于与活动定位柱2710配合。
请参考图1-3,在一种实施例中,活动定位柱2710与活动平台1000固接,活动平台1000上升或下降时带动活动定位柱2710升降,以实现活动定位柱2710与定位凹槽的配合或解除配合。
请参考图1-3,在一种实施例中,定位架2720包括定位支撑柱2721和定位连接柱2722,定位支撑柱2721的顶部与定位连接柱2722连接,用于支撑定位连接柱2722,定位凹槽设置在定位连接柱2722朝向活动定位柱2710的一侧。
请参考图1-3,定位支撑柱2721设置有两根,两根活动定位柱2710分别与定位连接柱2722的两端连接,定位支撑柱2721的底部设有定位连接板2723,定位连接板2723将定位支撑柱2721与导向板2430连接,定位连接板2723通过螺栓固定在地面或其他固定物上。
请参考图1和4,在一种实施例中,升降装置3000包括升降承载架3100、第一连接座3200、第二连接座3300、升降连杆组件3400和升降驱动组件3500。
升降装置3000与活动平台1000连接,用于带动活动平台1000升降运动。
请参考图1和4,升降承载架3100用于承载活动平台1000,第一连接座3200与升降承载架3100连接,第二连接座3300用于与旋转承载架4100连接。
请参考图4和5,升降连杆组件3400与第一连接座3200和第二连接座3300连接,升降连杆组件3400被驱动时能够带动第一连接座3200上升或下降。
请参考图4和5,在一种实施例中,升降连杆组件3400包括第一连杆3410、
第二连杆3420、第三连杆3430和第四连杆3440,第一连杆3410具有相对设置的第一端3411和第二端3412,第二连杆3420具有相对设置的第一端3421和第二端3422,第一连杆的第一端3411与第一连接座3200转动连接,第一连杆的第二端3412与第二连杆的第一端3421转动连接,第二连杆的第二端3422与第二连接座3300转动连接。
第三连杆3430具有相对设置的第一端3431和第二端3432,第四连杆3440具有相对设置的第一端3441和第二端3442,第三连杆的第一端3431与第一连接座3200转动连接,第三连杆的第二端3432与第四连杆的第一端3441转动连接,第四连杆的第二端3442与第二连接座3300转动连接。第一连杆3410、第二连杆3420、第三连杆3430和第四连杆3440被驱动时能够带动第一连接座3200上升或下降。
请参考图4和5,在一种实施例中,升降连杆组件3400设有两个,两个升降连杆组件3400相对设置,第一驱动轴3530的一端与一个升降连杆组件3400的第一连杆的第二端3412和第二连杆的第一端3421转动连接,第一驱动轴3530的另一端与另一个升降连杆组件3400的第一连杆的第二端3412和第二连杆的第一端3421转动连接。
第二驱动轴3540的一端与一个升降连杆组件3400的第三连杆的第二端3432和第四连杆的第一端3441转动连接,第二驱动轴3540的另一端与另一个升降连杆组件3400的第三连杆的第二端3432和第四连杆的第一端3441转动连接,第二驱动轴3540被驱动时,能够带动两个升降连杆组件3400运动。通过两个升降连杆组件3400来带动第一连接座3200上升或下降,使得传动过程更加稳定可靠。
请参考图5,升降驱动组件3500用于驱动升降连杆组件3400运动。
请参考图5,在一种实施例中,升降驱动组件3500包括升降驱动电机3510、驱动丝杆3520、第一驱动轴3530和第二驱动轴3540。
请参考图5,第一驱动轴3530与第二驱动轴3540相对设置,第一驱动轴3530与第一连杆的第二端3412和第二连杆的第一端3421转动连接,第二驱动轴3540与第三连杆的第二端3432和第四连杆的第一端3441转动连接。升降驱动电机3510与第一驱动轴3530固接,驱动丝杆3520沿水平方向设置,驱动丝杆3520与升降驱动电机3510的输出端连接,升降驱动电机3510用于驱动驱动丝杆3520转动,第二驱动轴3540套设于驱动丝杆3520,并与驱动丝杆3520螺纹连接,驱动丝杆3520被驱动时能够带动第二驱动轴3540在驱动丝杆3520上运动,以实现对升降连杆组件3400的驱动。
当需要驱动升降连杆组件3400运动时,启动升降驱动电机3510,通过升降驱动电机3510驱动驱动丝杆3520转动,带动第二驱动轴3540在驱动丝杆3520上运动,进而带动第一驱动轴3530和第二驱动轴3540在水平方向上相互靠近或远离。当第一驱动轴3530和第二驱动轴3540在水平方向上相互靠近时,带动第一连杆3410、第二连杆3420、第三连杆3430和第四连杆3440伸展,进而带动第一连接座3200上升,当第一驱动轴3530和第二驱动轴3540在水平方向上相互远离时,带动第一连杆3410、第二连杆3420、第三连杆3430和第四连杆3440折叠,进而带动第一连接座3200下降。
请参考图5,第一驱动轴3530和第二驱动轴3540包括梯形螺母轴,梯形螺母轴具有自锁功能。通过具有自锁功能的梯形螺母轴防止反向驱动,即,只能通过驱动丝杆3520带动升降连杆组件3400运动,而无法通过升降连杆组件3400带动驱动丝杆3520转动,使得升降连杆组件3400能够有效支撑第一连接座3200,提升了升降装置3000的安全性。
请参考图1和2,在一种实施例中,升降装置3000还包括升降传感器(图中未示出)、高位感应板(图中未示出)和低位感应板(图中未示出),升降传感器用于与活动平台1000连接,高位感应板和低位感应板的高度位置固定,升降传感器运动至与高位感应板相对的位置时产生高位感应信号,升降传感器运动至与低位感应板相对的位置时产生低位感应信号。
请参考图1和2,升降传感器与活动平台1000固接,高位感应板和低位感应板与定位架2720朝向活动平台1000的一侧固接。
请参考图4和5,在一种实施例中,升降装置3000还包括升降导杆3550,升降导杆3550的一端与升降承载架3100连接,另一端用于与旋转承载架4100连接,升降导杆3550用于对升降承载架3100的升降运动起导向作用。
请参考图4和5,升降导杆3550沿旋转承载架4100的周向设置有四个。具体的,升降导杆3550可以包括滑动连接的第一导杆和第二导杆,升降承载架3100上升或下降时能够带动第一导杆和第二导杆相对滑动,以对升降承载架3100的运动起导向作用。
请参考图4和5,在一种实施例中,升降装置3000还包括保护轴套3560,保护轴套3560套设在升降导杆3550下部,用于在其他支撑结构断裂时支撑升降承载架3100。具体的,保护轴套3560朝向升降承载架3100的一侧可以设置缓冲层,例如橡胶材质的缓冲层。
当升降连杆组件3400、驱动丝杆3520、第一驱动轴3530或第二驱动轴3540断裂时,升降承载架3100落到保护轴套3560,通过保护轴套3560支撑升降承载架3100,防止升降承载架3100坍塌。
请参考图4和5,在一种实施例中,升降装置3000还包括辅助气弹簧3570,辅助气弹簧3570一端与升降承载架3100连接,另一端用于与旋转承载架4100连接,以支撑升降承载架3100。
请参考图4和5,辅助气弹簧3570沿旋转承载架4100的周向设置有四个。通过辅助气弹簧3570辅助支撑升降承载架3100,以减小升降连杆组件3400提供的支撑力。
在另一种实施例中,升降连杆组件也可以采用剪叉式的连杆,例如采用两根中部相互铰接的连杆,连杆的顶部与升降承载架滑动连接,连杆的底部与旋转承载架滑动连接。升降驱动组件可以选用气缸,通过气缸推动连杆的顶部或底部滑动,带动连杆绕连杆中部的铰接处转动,实现对升降承载架的驱动。
在另一种实施例中,升降装置采用蜗轮丝杆升降机,例如,可以在升降承载架的相对两侧分别设置蜗轮丝杆升降机,通过两个驱动电机控制其整体升降。使得活动平台升降运动的稳定性更好,解决了剪叉式升降结构四周受力导致容易下沉的问题。
请参考图1和6,旋转装置4000包括旋转承载架4100、摩擦滚轮4200、旋转驱动组件4300和调节组件4400。
旋转装置4000设置在行走底盘2100上,并与升降装置3000连接,用于带动升降装置3000和活动平台1000旋转运动。
请参考图1和6,旋转承载架4100用于承载活动平台1000,旋转承载架4100具有旋转连接部,用于与行走底盘2100转动连接。
请参考图6,在一种实施例中,旋转装置4000还包括承载转轴4500,旋转连接部位于旋转承载架4100的中心,承载转轴4500一端与旋转连接部转动连接,另一端用于与行走底盘2100连接。通过承载转轴4500实现旋转承载架4100与行走底盘2100的转动连接。
请参考图6,具体的,承载转轴4500上可以装有圆锥滚子轴承,承载转轴4500可以通过轴端法兰与旋转承载架4100连接。
请参考图6和7,摩擦滚轮4200转动设置,摩擦滚轮4200与旋转承载架4100抵紧,摩擦滚轮4200被驱动时能够带动旋转承载架4100旋转运动。
请参考图7,在一种实施例中,摩擦滚轮4200包括橡胶轮。橡胶轮的表面摩擦系数较大,有利于带动旋转承载架4100旋转运动。
请参考图6和7,在一种实施例中,旋转驱动组件4300包括旋转驱动电机4310、主动摩擦链轮4320、从动摩擦链轮4330、摩擦转轴4340和摩擦传动链4350。旋转驱动组件4300用于驱动摩擦滚轮4200转动。
请参考图6和7,主动摩擦链轮4320与旋转驱动电机4310的输出端连接,旋转驱动电机4310用于驱动主动摩擦链轮4320转动。摩擦转轴4340转动设置,摩擦滚轮4200与摩擦转轴4340连接,摩擦转轴4340被转动时能够带动摩擦滚轮4200转动,从动摩擦链轮4330与摩擦转轴4340连接,摩擦传动链4350将主动摩擦链轮4320和从动摩擦链轮4330连接,以使主动摩擦链轮4320被驱动时能够带动从动摩擦链轮4330和摩擦转轴4340转动。
当需要驱动摩擦滚轮4200转动时,启动旋转驱动电机4310,通过旋转驱动电机4310驱动主动摩擦链轮4320转动,带动从动摩擦链轮4330和摩擦转轴4340转动,进而带动摩擦滚轮4200转动。
在其他实施例中,也可以采用齿轮传动结构或带传动结构带动摩擦滚轮4200转动。例如,在承载转轴4500上固设从动齿轮,通过三相电机和减速机驱动主动齿轮转动,带动从动齿轮与承载转轴4500转动,齿轮传动更加精确和平稳。省去了摩擦传动的调节组件4400的设计方案,加工零件少,驱动方式精密,可靠性高。
请参考图6和7,在一种实施例中,调节组件4400包括摩擦固定座4410、摩擦承载板4420、摩擦轴安装座4430、摩擦抵接块4440、调节弹簧4450、调节螺栓(图中未示出)和调节螺母4460。调节组件4400用于调节摩擦滚轮4200与旋转承载架4100间抵紧力的大小。
请参考图6和7,摩擦固定座4410用于与行走底盘2100连接,摩擦承载板4420承载于摩擦固定座4410,摩擦承载板4420的一侧与摩擦固定座4410铰接,另一侧与摩擦抵接块4440铰接。摩擦抵接块4440具有摩擦螺孔4441,摩擦固定座4410具有摩擦通孔4411,调节螺栓贯穿摩擦通孔4411和摩擦螺孔4441,并与摩擦螺孔4441螺纹连接,调节弹簧4450套住调节螺栓,调节弹簧4450一端与摩擦抵接块4440抵接,另一端与摩擦固定座4410抵接,以实现对摩擦承载板4420的浮动支撑。调节螺母4460位于摩擦固定座4410的底部,并与调节螺栓套接,摩擦轴安装座4430与摩擦承载板4420固接,摩擦转轴4340与摩擦轴安装座4430转动连接。通过改变调节螺栓位于摩擦固定座4410上侧的长度来调节摩擦滚轮4200与旋转承载架4100间抵紧力的大小。
请参考图6和7,在一种实施例中,旋转装置4000还包括支撑轮组件4600,支撑轮组件4600包括支撑滚轮4610和支撑轮座4620,支撑滚轮4610与支撑轮座4620转动连接,支撑轮座4620用于与行走底盘2100连接,支撑滚轮4610与旋转承载架4100的底部接触,用于支撑旋转承载架4100。
请参考图6和7,在一种实施例中,支撑轮组件4600沿旋转承载架4100的周向设置有四个。通过支撑轮组件4600支撑旋转承载架4100的边侧,使得旋转承载架4100的转动更加平稳。
请参考图6,在一种实施例中,旋转承载架4100具有加强筋4110和加强板4120,加强板4120具有升降通孔,用于容纳和固定升降导杆3550的底部。
请参考图6,在一种实施例中,升降承载架3100具有上安装板3110和下安装板3120,上安装板3110具有上通孔,下安装板3120具有下通孔,上通孔用于容纳和固定升降导杆3550的顶部,下通孔用于供升降导杆3550的中部穿过。
请参考图1、2和6,在一种实施例中,旋转装置4000还包括旋转感应板(图中未示出)、第一旋转传感器4700和第二旋转传感器4800,旋转感应板用于设置在台板的一侧,第一旋转传感器4700用于与活动平台1000的一侧连接,第二旋转传感器4800用于与活动平台1000的另一侧连接,第一旋转传感器4700转动至与旋转感应板相对的位置时产生第一旋转感应信号,第二旋转传感器4800转动至与旋转感应板相对的位置时产生第二旋转感应信号。当控制系统接收到第一旋转感应信号时,控制系统会控制旋转驱动电机4310降低转速,使得旋转承载架4100的转速降低,当控制系统接收到第二旋转感应信号时,控制系统会控制旋转驱动电机4310停止工作,使得旋转承载架4100停止转动。
请参考图1、2和6,在一种实施例中,第一旋转传感器4700和第二旋转传感器4800与升降传感器的功能集成在一起,例如,当第一旋转传感器4700转动至靠近定位架2720的一侧时,第一旋转传感器4700可以当作升降传感器使用,当第二旋转传感器4800转动至靠近定位架2720的一侧时,则第二旋转传感器4800当作升降传感器使用,即,第一旋转传感器4700和第二旋转传感器4800既能用于与旋转感应板发生感应,也能用于与高位感应板和低位感应板发生感应。其他实施例中,第一旋转传感器4700、第二旋转传感器4800与升降传感器也可以分别设置成不同的传感器。
请参考图1和2,在一种实施例中,移动滑线装置5000通过固定支架5100与活动平台1000固接,移动滑线装置5000用于给台板印刷机供电。当台板印刷机在活动平台1000上运动时,台板印刷机从移动滑线装置5000上的滑触线取电,达到移动供电的目的。台板上也设有移动滑线装置5000,周转车上的移动滑线装置5000可以与台板上的移动滑线装置5000对接。
工作过程概述:当需要在不同台板间调度台板印刷机时(需要改变台板印刷机的朝向),通过运动装置2000带动活动平台1000运动至承载待取台板印刷机的台板处,此时活动平台1000与台板平齐,台板印刷机通过印刷机行走轨道1100运动至活动平台1000上,并通过印刷机定位柱实现定位。接着通过升降装置3000驱动活动平台1000上升,当升降传感器感应到高位感应板时,停止上升,此时活动平台1000位于最高位(高于台板)。再通过旋转装置4000驱动活动平台1000旋转180°,同时运动装置2000带动活动平台1000向待放置台板印刷机的台板运动,这两个动作同时执行,在旋转到位时,活动平台1000也行走至待放置台板印刷机的台板处。接着通过升降装置3000驱动活动平台1000下降,当升降传感器感应到低位感应板时,停止下降,此时活动平台1000位于最低位(与台板平齐)。再解除印刷机定位柱的定位,台板印刷机通过印刷机行走轨道1100运动至待放置台板印刷机的台板上,完成台板印刷机的调度。
以上内容是结合具体的实施方式对本申请所作的进一步详细说明,不能认定本申请的具体实施只局限于这些说明。对于本申请所属技术领域的普通技术人员来说,在不脱离本申请发明构思的前提下,还可以做出若干简单推演或替换。
Claims (10)
1.一种周转车的升降装置,其特征在于,包括:
升降承载架,其用于承载活动平台;
第一连接座,其与升降承载架连接;
第二连接座,其用于与承载物连接;
升降连杆组件,其与第一连接座和第二连接座连接,所述升降连杆组件被驱动时能够带动第一连接座上升或下降;
以及升降驱动组件,其用于驱动升降连杆组件运动。
2.如权利要求1所述的周转车的升降装置,其特征在于,所述升降连杆组件包括第一连杆、第二连杆、第三连杆和第四连杆,所述第一连杆具有相对设置的第一端和第二端,所述第二连杆具有相对设置的第一端和第二端,所述第一连杆的第一端与第一连接座转动连接,所述第一连杆的第二端与第二连杆的第一端转动连接,所述第二连杆的第二端与第二连接座转动连接;
所述第三连杆具有相对设置的第一端和第二端,所述第四连杆具有相对设置的第一端和第二端,所述第三连杆的第一端与第一连接座转动连接,所述第三连杆的第二端与第四连杆的第一端转动连接,所述第四连杆的第二端与第二连接座转动连接。
3.如权利要求2所述的周转车的升降装置,其特征在于,所述升降驱动组件包括升降驱动电机、驱动丝杆、第一驱动轴和第二驱动轴,所述第一驱动轴与第二驱动轴相对设置,所述第一驱动轴与第一连杆的第二端和第二连杆的第一端转动连接,所述第二驱动轴与第三连杆的第二端和第四连杆的第一端转动连接;
所述升降驱动电机与第一驱动轴固接,所述驱动丝杆沿水平方向设置,所述驱动丝杆与升降驱动电机的输出端连接,所述升降驱动电机用于驱动所述驱动丝杆转动,所述第二驱动轴套设于驱动丝杆,并与驱动丝杆螺纹连接,所述驱动丝杆被驱动时能够带动第二驱动轴在驱动丝杆上运动,以实现对升降连杆组件的驱动。
4.如权利要求3所述的周转车的升降装置,其特征在于,所述升降连杆组件设有两个,两个升降连杆组件相对设置,所述第一驱动轴的一端与一个升降连杆组件的第一连杆的第二端和第二连杆的第一端转动连接,所述第一驱动轴的另一端与另一个升降连杆组件的第一连杆的第二端和第二连杆的第一端转动连接;
所述第二驱动轴的一端与一个升降连杆组件的第三连杆的第二端和第四连杆的第一端转动连接,所述第二驱动轴的另一端与另一个升降连杆组件的第三连杆的第二端和第四连杆的第一端转动连接,所述第二驱动轴被驱动时,能够带动两个升降连杆组件运动。
5.如权利要求4所述的周转车的升降装置,其特征在于,所述第一驱动轴和第二驱动轴包括梯形螺母轴,所述梯形螺母轴具有自锁功能。
6.如权利要求1-5任一项所述的周转车的升降装置,其特征在于,还包括升降传感器、高位感应板和低位感应板,所述升降传感器用于与活动平台连接,所述高位感应板和低位感应板的高度位置固定,所述升降传感器运动至与高位感应板相对的位置时产生高位感应信号,所述升降传感器运动至与低位感应板相对的位置时产生低位感应信号。
7.如权利要求1-5任一项所述的周转车的升降装置,其特征在于,还包括升降导杆,所述升降导杆的一端与升降承载架连接,另一端用于与旋转承载架连接,所述升降导杆用于对升降承载架的升降运动起导向作用。
8.如权利要求7所述的周转车的升降装置,其特征在于,还包括保护轴套,所述保护轴套套设在升降导杆下部,用于在其他支撑结构断裂时支撑所述升降承载架。
9.如权利要求1-5任一项所述的周转车的升降装置,其特征在于,还包括辅助气弹簧,所述辅助气弹簧一端与升降承载架连接,另一端用于与旋转承载架连接,以支撑所述升降承载架。
10.一种周转车,其特征在于,包括如权利要求1-9任一项所述的周转车的升降装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922065446.3U CN211335075U (zh) | 2019-11-26 | 2019-11-26 | 一种周转车及周转车的升降装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922065446.3U CN211335075U (zh) | 2019-11-26 | 2019-11-26 | 一种周转车及周转车的升降装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211335075U true CN211335075U (zh) | 2020-08-25 |
Family
ID=72094031
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922065446.3U Active CN211335075U (zh) | 2019-11-26 | 2019-11-26 | 一种周转车及周转车的升降装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211335075U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113120530A (zh) * | 2021-06-17 | 2021-07-16 | 山东宏跃网架钢结构有限公司 | 一种转运输送系统 |
-
2019
- 2019-11-26 CN CN201922065446.3U patent/CN211335075U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113120530A (zh) * | 2021-06-17 | 2021-07-16 | 山东宏跃网架钢结构有限公司 | 一种转运输送系统 |
| CN113120530B (zh) * | 2021-06-17 | 2021-08-17 | 山东宏跃网架钢结构有限公司 | 一种转运输送系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109436657B (zh) | 能够自动转向和升降的工件输送车 | |
| CN101811389B (zh) | 丝网印刷机 | |
| US20060102433A1 (en) | Stacker crane | |
| CN209853188U (zh) | 带拐角的双层循环线系统 | |
| CN211335075U (zh) | 一种周转车及周转车的升降装置 | |
| CN1058378A (zh) | 纸张操作机及其相配的纸垛运送装置 | |
| CN110696892A (zh) | 一种周转车 | |
| CN110884543A (zh) | 一种周转车及周转车的运动装置 | |
| CN111038116A (zh) | 钢瓶全自动印字机 | |
| CN1061313C (zh) | 送进一卷筒上的卷材的组件 | |
| CN210882214U (zh) | 一种周转车及周转车的旋转装置 | |
| CN210882213U (zh) | 一种周转车 | |
| CN210882215U (zh) | 一种周转车及周转车的运动装置 | |
| CN211641469U (zh) | 钢瓶全自动印字机 | |
| CN113802903B (zh) | 一种基于agv小车转运车辆的停取方法 | |
| CN113148430B (zh) | 底架存放架以及底架上料装置 | |
| CN211365992U (zh) | 多功能行走机器人小车 | |
| CN112850431A (zh) | 一种带有滚筒小车的提升装置及方法 | |
| KR200280709Y1 (ko) | 견인차량의 측면 리프팅장치 | |
| CN106584765A (zh) | 一种自适应车床高度的换模台车 | |
| CN202508609U (zh) | 一种能够实现平行输送线间车身移动的移行装置 | |
| CN212475068U (zh) | 一种可调式爬坡皮带输送机 | |
| CN114132700B (zh) | 电驱动多种管杆输送机 | |
| CN212470305U (zh) | 罐箱装配总装台 | |
| CN215591956U (zh) | 转盘码垛机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |