CN210822615U - 一种边三轮摩托车边轮随动转向系统 - Google Patents
一种边三轮摩托车边轮随动转向系统 Download PDFInfo
- Publication number
- CN210822615U CN210822615U CN201921320096.4U CN201921320096U CN210822615U CN 210822615 U CN210822615 U CN 210822615U CN 201921320096 U CN201921320096 U CN 201921320096U CN 210822615 U CN210822615 U CN 210822615U
- Authority
- CN
- China
- Prior art keywords
- steering
- wheel
- angle sensor
- limit
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Steering Devices For Bicycles And Motorcycles (AREA)
Abstract
本实用新型涉及一种边三轮摩托车边轮随动转向系统,设于边三轮摩托车主车架及边车架上,在主车架方向柱主管内设有前轮角度传感器,所述边轮轴上设有边轮角度传感器,所述主车架上还设有用于接收并处理所述前轮角度传感器及边轮角度传感器信号的控制器,所述边摇臂上设有转向电机,所述边摇臂上设有转向传动箱,该转向传动箱的输出轴与主销连接,所述转向电机输出轴与所述转向传动箱输入轴连接;所述前轮角度传感器、边轮角度传感器、控制器及转向电机电连接。传感器测量前轮转向角度及边轮实际角度,通过阿克曼转向曲线计算,使边轮随动转型,实时反馈控制调整边轮角度,转向平稳安全。
Description
技术领域
本实用新型涉及一种边三轮摩托车边轮随动转向装置。
背景技术
边三轮摩托车具有主车架、边车架,其边轮通过边摇臂、边轮轴安装在边车架上,迄今为止,大部分边三轮摩托车的边轮不具备转向功能。当驾驶边三轮摩托车转弯时,除减速、缓转外,驾驶人员需要用自己身体的倾斜来控制车体的重心,使身体与车体保持相对的平衡和稳定,从而平稳的完成转弯,需要较熟练的驾驶技术,同时车辆的安全性不能很好地保证。
中国实用新型专利申请CN1290740C公开了一种边三轮摩托车边轮转向机构,是从主车架方向柱下连接板上对称的引出两根拉索,连接到边车架上的转向臂上,转向臂通过一个球接头与转向拉杆连接,转向拉杆再通过一个球接头与边轮的转向节连接,当主车前轮转向时,下连接板通过拉索带动转向臂,再通过转向拉杆和转向节推动边轮转向。利用机械结构实现边轮转向,其转向角度不够精密,转向阻力较大。
实用新型内容
针对上述问题,本实用新型提出了一种边三轮摩托车边轮随动转向系统,克服现有边三轮摩托车边轮转向的不足,使边轮具有更好地随动转向功能,保证车辆行驶安全,驾驶体验更好。
为实现上述功能,本实用新型采用如下技术方案:一种边三轮摩托车边轮随动转向系统,设于边三轮摩托车主车架及边车架上,所述边车架外侧设置有边摇臂,主销通过轴承与边摇臂连接,转向节套设于主销上并随之转动,所述转向节上设有边轮轴,边轮安装于所述边轮轴上,其特征在于:所述主车架方向柱主管内设有前轮角度传感器,所述边轮轴上设有边轮角度传感器,所述主车架上还设有用于接收并处理所述前轮角度传感器及边轮角度传感器信号的控制器,所述边摇臂上设有转向电机,所述边摇臂上设有转向传动箱,该转向传动箱的输出轴与主销连接,所述转向电机输出轴与所述转向传动箱输入轴连接;所述前轮角度传感器、边轮角度传感器、控制器及转向电机电连接。
进一步的,所述转向传动箱内设有蜗轮蜗杆传动机构。
进一步的,所述转向传动箱内设有锥齿轮传动机构。
综上所述,本实用新型结构合理,原理简单,通过简单的传感器、控制器及动力装置,实现边轮随动转向。
附图说明
图1是边三轮摩托车边轮随动转向系统主车架结构示意图。
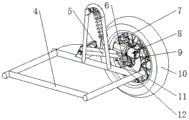
图2是边三轮摩托车边轮随动转向系统边车架结构示意图
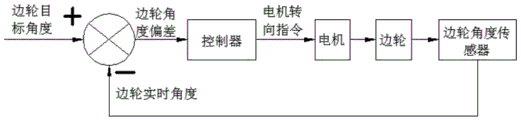
图3是边三轮摩托车边轮随动转向系统控制流程图。
具体实施方式
下面结合具体实施例及附图来进一步详细说明本实用新型。
一种如图1至图2所示的边三轮摩托车边轮随动转向系统,设于边三轮摩托车主车架1及边车架4上,所述边车架4外侧设置有边摇臂5,主销12通过轴承与边摇臂5连接,转向节11套设于主销12上并随之转动,所述转向节11 上设有边轮轴9,边轮10安装于所述边轮轴9上,其特征在于:所述主车架1 方向柱主管内设有前轮角度传感器2,所述边轮轴上设有边轮角度传感器6,所述主车架1上还设有用于接收并处理所述前轮角度传感器2及边轮角度传感器6 信号的控制器3,所述边摇臂5上设有转向电机7,所述边摇臂5上设有转向传动箱8,该转向传动箱8的输出轴与主销12连接,所述转向电机7输出轴与所述转向传动箱8输入轴连接;所述前轮角度传感器2、边轮角度传感器6、控制器3及转向电机7电连接。
进一步的,所述转向传动箱8内设有蜗轮蜗杆传动机构,包括盐水平方向布置的蜗杆以及沿竖直方向布置的蜗轮,将驱动电机8输出的力矩转换方向传递给主销12,以带动主销12旋转,从而完成边轮的转向。
根据本实用新型的技术要求,也可采用另一种实施方案,在转向传动箱8 内设置锥齿轮传动机构,一个竖直方向、一个水平方向的锥齿轮传动机构,也可完成传动要求。
转向传动箱8内设有蜗轮蜗杆机构,将转向电机7的动力转换方向,传送至主销12。转向传动箱8也可使用锥齿轮传动机构实现动力转换及传输。
如图3所示,当主车前轮转动时,前轮角度传感器2检测到方向柱转动的角度,边轮角度传感器6检测边轮实际转向角度,并将两个角度信号传递给控制器3,控制器3接受信号后,通过前轮转向角度计算出边轮理论转向角度,并结合边轮实际转向角度,计算出边轮角度偏差,将此偏差角度信号传递给转向电机7,对转向电机7发出转动角度的指令信号,转向电机7接到信号后转动,通过转向传动箱8带动转向节11转动,从而使边轮10转向。通过控制器3的 PID算法和逻辑控制便可实现三个车轮在阿克曼转向曲线范围内绕同一瞬时转向中心转动。从而有效的提高整车行驶的稳定性及安全性,减少边轮磨损。
以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
Claims (3)
1.一种边三轮摩托车边轮随动转向系统,设于边三轮摩托车主车架(1)及边车架(4)上,所述边车架(4)外侧设置有边摇臂(5),主销(12)通过轴承与边摇臂(5)连接,转向节(11)套设于主销(12)上并随之转动,所述转向节(11)上设有边轮轴(9),边轮(10)安装于所述边轮轴(9)上,其特征在于:所述主车架(1)方向柱主管内设有前轮角度传感器(2),所述边轮轴上设有边轮角度传感器(6),所述主车架(1)上还设有用于接收并处理所述前轮角度传感器(2)及边轮角度传感器(6)信号的控制器(3),所述边摇臂(5)上设有转向电机(7),所述边摇臂(5)上设有转向传动箱(8),该转向传动箱(8)的输出轴与主销(12)连接,所述转向电机(7)输出轴与所述转向传动箱(8)输入轴连接;所述前轮角度传感器(2)、边轮角度传感器(6)、控制器(3)及转向电机(7)电连接。
2.按照权利要求1所述一种边三轮摩托车边轮随动转向系统,其特征在于:所述转向传动箱(8)内设有蜗轮蜗杆传动机构。
3.按照权利要求1所述一种边三轮摩托车边轮随动转向系统,其特征在于:所述转向传动箱(8)内设有锥齿轮传动机构。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921320096.4U CN210822615U (zh) | 2019-08-15 | 2019-08-15 | 一种边三轮摩托车边轮随动转向系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921320096.4U CN210822615U (zh) | 2019-08-15 | 2019-08-15 | 一种边三轮摩托车边轮随动转向系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210822615U true CN210822615U (zh) | 2020-06-23 |
Family
ID=71274360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921320096.4U Active CN210822615U (zh) | 2019-08-15 | 2019-08-15 | 一种边三轮摩托车边轮随动转向系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210822615U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114291048A (zh) * | 2022-01-12 | 2022-04-08 | 徐州米然机车配件有限公司 | 一种转向安全装置 |
-
2019
- 2019-08-15 CN CN201921320096.4U patent/CN210822615U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114291048A (zh) * | 2022-01-12 | 2022-04-08 | 徐州米然机车配件有限公司 | 一种转向安全装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201670260U (zh) | 独立转向装置及独立悬架系统 | |
| CN102069843B (zh) | 线控车轮独立转向执行机构及车轮总成 | |
| CN103600796B (zh) | 一种单轴驱动的两轮自平衡车 | |
| CN101722983A (zh) | 可变传动比的电动助力转向系统及其传动比控制方法 | |
| WO2015158066A1 (zh) | 一种电动汽车四轮独立转向底盘系统及其线控转向机构 | |
| CN103287493A (zh) | 一种转向驱动轮 | |
| CN210822615U (zh) | 一种边三轮摩托车边轮随动转向系统 | |
| CN202175087U (zh) | 一种转向传动机构 | |
| CN102632921A (zh) | 一种力与位移耦合控制的电动推杆式转向系统及控制方法 | |
| CN203268122U (zh) | 一种汽车四轮转向系统 | |
| CN103405934A (zh) | 一种由能量转换驱动的可转向三轮无碳小车 | |
| CN108297934A (zh) | 一种具有转向系统的电车 | |
| CN206589958U (zh) | 一种主动复合转向系统及转矩控制装置 | |
| CN204452578U (zh) | 一种纯电动汽车助力转向系统 | |
| CN211568076U (zh) | 一种用于自动驾驶车辆的可伸缩线控方向盘 | |
| CN206475933U (zh) | 前梯交叉几字形转向机构及卡丁车 | |
| CN201980286U (zh) | 一种可左右±90度横转向的电动车控制装置 | |
| CN111591342A (zh) | 车辆力矩转向系统 | |
| CN211494249U (zh) | 一种用于无人驾驶领域的线控底盘 | |
| CN203854713U (zh) | 一种车辆转向系统及电动货车 | |
| CN107458458A (zh) | 汽车底盘总成 | |
| CN208102100U (zh) | 一种具有转向系统的电车 | |
| CN110539838A (zh) | 一种边三轮摩托车边轮随动转向系统及控制方法 | |
| CN206307104U (zh) | 一种电动汽车上eps与ehps同时搭载的系统 | |
| CN213921343U (zh) | 智能三轮车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder |
Address after: No. 1, Yunhui Road, North District, Yubei District Economic and Technological Development Zone, Chongqing 400000 Patentee after: Chongqing GAOJIN Industrial Co.,Ltd. Address before: No. 1, Yunhui Road, North District, Yubei District Economic and Technological Development Zone, Chongqing 400000 Patentee before: CHONGQING GAOKIN INDUSTRY Co.,Ltd. |
|
| CP01 | Change in the name or title of a patent holder |