CN210590928U - 一种光学胶入料结构 - Google Patents
一种光学胶入料结构 Download PDFInfo
- Publication number
- CN210590928U CN210590928U CN201920873121.5U CN201920873121U CN210590928U CN 210590928 U CN210590928 U CN 210590928U CN 201920873121 U CN201920873121 U CN 201920873121U CN 210590928 U CN210590928 U CN 210590928U
- Authority
- CN
- China
- Prior art keywords
- optical cement
- feeding
- optical
- assembly
- hard
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Landscapes
- Liquid Crystal (AREA)
Abstract
本实用新型涉及入料结构的技术领域,公开了一种光学胶入料结构,用于对光学胶进行上料,包括光学胶叠片上料组件、用于取料的光学胶取料机械手、用于传递光学胶到光学胶上料机械手组件的光学胶入料平台组件;光学胶叠片上料组件,包括托板、用于承载液晶屏光学胶叠片的光学胶换料底板和驱动机构;光学胶换料底板的侧周缘还设有用于定位光学胶叠片的多个定位柱;通过光学胶叠片上料组件进行光学胶上料,然后由光学胶取料机械手转运光学胶,接着再由光学胶入料平台组件转到可以由光学胶上料机械手组件取走的位置中去,从而实现一体的光学胶取料上料的过程,整个过程无需人工参与,大大增加生产效率。
Description
技术领域
本实用新型专利涉及入料结构的技术领域,具体而言,涉及一种光学胶入料结构。
背景技术
随着触摸技术的发展与成本的进一步降低,触摸技术与显示技术的进一步结合,除了手机等传统应用之外,触控个人电脑智能家电将成为触摸屏发展的新动力;随着信息技术的不断发展,触摸屏给人们带来的便利,中大尺寸触摸面板的推出使国内许多企业开始对触摸屏技术产生兴趣。
目前,对各类机器越来越朝向成本的进一步降低、操作方便、性能优越、能满足中大尺寸触摸面板生产等特点的方向发展。OCA(opticalclearadhesive,即光学胶片)贴合机也不例外成为电容式触摸屏生产工艺后段贴合最重要的设备,但是在进行OCA贴合时,对于针对OCA的入料非常重要。
现有技术中,入料机构都缺乏整体性,一般都只有入料组件而没有进一步的上料结构的结合,不够全面,导致生产效率低或者产能低下。
实用新型内容
本实用新型的目的在于提供一种光学胶入料结构,旨在解决现有技术中不够全面,生产效率低的问题。
本实用新型是这样实现的,一种光学胶入料结构,用于对光学胶进行上料,包括光学胶叠片上料组件、用于取料的光学胶取料机械手、用于传递光学胶到光学胶上料机械手组件的光学胶入料平台组件;所述光学胶叠片上料组件,用于叠放多层光学胶叠片,包括托板、用于承载液晶屏光学胶叠片的光学胶换料底板和用于驱动光学胶升降板上下移动的驱动机构,所述驱动机构包括电机和线性模组,所述电机与所述线性模组电性连接;所述光学胶换料底板的侧周缘还设有用于定位光学胶叠片的多个定位柱。
进一步地,所述光学胶叠片上料机构还包括横向驱动的导轨以及导轨连接板,所述导轨连接板的下表面设置有导块,所述导块与所述导轨活动连接,所述光学胶升降板与所述驱动机构相对固定布置,所述导轨设有硬限位机构、用于缓冲的上料液压缓冲器以及上料笔形气缸。
进一步地,所述光学胶取料机械手包括光学胶取料吸附机构以及用于装载所述光学胶取料吸附机构的光学胶取料龙门架,所述光学胶吸附机构包括用于吸附光学胶的光学胶取料吸附组件,所述光学胶取料吸附组件包括竖直吸附气缸、用于吸取光学胶的吸笔、用于固定吸笔的固定件;所述固定件设置有开孔,所述竖直吸附气缸穿设于所述固定件中。
进一步地,所述光学胶吸附机构还包括吸附架体以及导轨,所述吸附架体与所述导轨相对固定布置,所述吸附架体下端形成有安装端,所述安装端与所述固定件固定布置。
进一步地,所述光学胶吸附机构与所述光学胶取料龙门架相对固定布置,所述光学胶取料吸附机构包括取料滑台、电磁阀以及模组连接板,所述光学胶取料龙门架形成有滑轨,所述取料滑台与所述滑轨活动连接布置;所述模组连接板与所述光学胶取料吸附组件相对固定布置,所述光学胶取料吸附组件包括取料架体,所述取料架体朝下与所述固定件固定布置,朝上与所述模组连接板固定布置。
进一步地,所述光学胶入料平台组件包括X轴笔形气缸、用于调整位置的光学胶旋转气缸、用于检查是否叠片的光学胶叠片检测组件;所述光学胶检测组件包括光学胶检测模组、用于承放光学胶的光学胶入料平台、用于架设光学胶叠片检测模组的导向架;所述光学胶检测模组包括对射光纤件以及叠片数显真空表,所述对射光纤件的出口朝向所述光学胶入料平台。
进一步地,光学胶入料平台组件还包括两根平行的入料平行滑轨、布设于所述入料平行滑轨一端的硬限位机构以及用于缓冲所述光学胶叠片检测组件的液压缓冲器,所述X轴笔形气缸架设于两根所述入料平行滑轨之间;所述导向架下端形成滑块,滑块与所述入料平行滑轨活动连接布置;所述光学胶入料平台具有下端面,光学胶旋转气缸布设在所述光学胶入料平台的下端面。
进一步地,所述对射光纤件的出口略微高于光学胶入料平台,所述叠片数显真空表与导向架固定布置,所述对射光纤件与所述叠片数显真空表电性连接。
进一步地,所述光学胶上料机械手组件包括光学胶上料吸附组件、用于提供动力的光学胶上料滑台气缸、用于辅助所述光学胶上料吸附组件上下移动的光学胶上料滑动组件;所述光学胶上料吸附组件包括上料吸笔、用于固定所述上料吸笔的上料固定件;所述上料固定件下端形成上料吸附架,所述上料吸笔上端与所述上料吸附架固定布置。
进一步地,所述光学胶上料滑动组件包括上料滑动导轨、控制块以及气缸连接板,所述光学胶上料滑台气缸与所述气缸连接板固定布置,所述控制块与所述气缸连接板固定布置,所述控制块形成有与所述上料滑动导轨活动连接布置的上料活动滑块。
与现有技术相比,本实用新型提供的一种光学胶入料结构,通过光学胶叠片上料组件进行光学胶上料,然后由光学胶取料机械手转运光学胶,接着再由光学胶入料平台组件转到可以由光学胶上料机械手组件取走的位置中去,从而实现一体的光学胶取料上料的过程,整个过程无需人工参与,大大增加生产效率。
附图说明
图1是本发明提供的全自动化贴合设备的正面的立体示意图;
图2是本发明提供的全自动化贴合设备的背面的立体示意图;
图3是本发明提供的离子清洗机构的立体示意图;
图4是本发明提供的软对硬贴合上下料机构的正面的立体示意图;
图5是本发明提供的软对硬贴合上料机构的立体示意图;
图6是本发明提供的软对硬贴合下料机构的立体示意图;
图7是本发明提供的触摸屏上料翻转平台的立体示意图;
图8是本发明提供的光学胶叠片上料组件的立体示意图;
图9是本发明提供的光学胶取料吸附机构的立体示意图;
图10是本发明提供的光学胶入料平台组件的立体示意图;
图11是本发明提供的光学胶上料机械手组件的立体示意图;
图12是本发明提供的重离型下撕膜机构的立体示意图;
图13是本发明提供的硬对硬贴合上箱体组件的立体示意图;
图14是本发明提供的小耳朵上料机构的立体示意图;
图15是本发明提供的硬对硬贴合下箱体组件的立体示意图;
图16是本发明提供的触摸屏校正相机组件的立体示意图;
图17是本发明提供的液晶屏校正相机组件的立体示意图;
图18是本发明提供的硬对硬贴合上箱体的正面的示意图;
图19是本发明提供的全自动化贴合设备的电子元件之间的电性连接示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的实现进行详细的描述。
本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
参照图1-19所示,为本发明提供的较佳实施例。
用于液晶屏的自动化贴合设备,用于将液晶屏和触摸屏通过光学胶贴合,包括触摸屏上料机构101、适用于触摸屏的软对硬贴合上下料结构1、光学胶入料机构、贴合网箱机构5、真空箱体组件、抽检机构7,真空箱体组件包括硬对硬贴合上箱体3222和硬对硬贴合下箱体3227,光学胶入料机构包括光学胶取料机械手4;光学胶入料平台2106组件包括光学胶上料机械手301;触摸屏上料机构101用于进行触摸屏上料,适用于触摸屏的软对硬贴合上下料结构1用于将触摸屏转运和贴合,贴合网箱机构5用于将触摸屏与光学胶贴合,适用于触摸屏的软对硬贴合上下料结构1用于搬运触摸屏,真空箱体组件用于将触摸屏和液晶屏抽真空贴合,抽检机构7用于抽检触摸屏,硬对硬贴合上箱体3222用于吸附触摸屏,硬对硬贴合下箱体3227可供液晶屏放入,光学胶取料机械手4用于从光学胶上料机构吸取光学胶至光学胶入料平台2106。
触摸屏上料机构101将触摸屏进行上料后,适用于触摸屏的软对硬贴合上下料结构1将触摸屏转运到指定的贴合位置,而后光学胶取料机械手4从光学胶上料机构中取出光学胶,并且通过光学胶取料机械手4以及光学胶入料平台2106搬运至贴合网箱机构5中,而后触摸屏先经过光学胶贴合后,被真空箱体组件的硬对硬贴合上箱体3222吸附,然后将放有液晶屏的硬对硬贴合下箱体3227移动至硬对硬贴合上箱体3222下方,压合硬对硬贴合下箱体3227以及硬对硬贴合上箱体3222,使液晶屏和触摸屏之间抽真空贴合,完成液晶屏和触摸屏的贴合过程;整个过程借助多个机构自动转运、配合实现,可以在一台设备上实现多个贴合工艺,而无需借助多台整机设备配合实现,降低了设备成本,提高了生产自动化,最终提高了生产效率。
还有,用于液晶屏的自动化贴合设备还包括液晶屏定位机构8,液晶屏定位机构8包括校正件以及校正气缸,校正件包括定位轮以及定位组件,定位组件包括粗调手柄以及微调螺杆;校正件用于校正,校正气缸用于推动校正件,定位轮用于定位,定位组件用于定位以及校正,微调螺杆用于微调液晶屏位置。
通过设置液晶屏定位机构8,上料时可以实现精确上料,而且设有校正件,可以在运输过程中对液晶屏进行校正。
还有,光学胶贴附有上贴膜和下贴膜,用于液晶屏的自动化贴合设备还包括小耳朵上料机构9、用于光学胶的重离型下撕膜结构10、轻离型上撕膜机构11,轻离型上撕膜机构11包括夹紧气缸;小耳朵上料机构9用于提供小耳朵,用于光学胶的重离型下撕膜结构10用于借助小耳朵撕除下贴膜,轻离型上撕膜机构11用于借助小耳朵撕除上贴膜,夹紧气缸用于夹取小耳朵。
通过设置小耳朵上料机构9以及用于光学胶的重离型下撕膜结构10,可以实现全程自动化撕膜。
具体地,轻离型上撕膜机构11在Y轴上安装夹紧气缸,且夹紧气缸的后部还安装了一个角度可调的伺电机,实现了夹紧气缸的角度可调,方便了能夹取小耳朵,又能转角度去撕盖板上的膜片。
还有,用于液晶屏的自动化贴合设备还包括软对硬上料龙门架12;软对硬上料龙门架12用于承载轻离型上撕膜机构11以及光学胶上料手臂。
具体地,通过将两个机构同时设置在一起,可以实现双工位同时工作。
还有,小耳朵上料机构9,包括同步轮、同步带、多个导向轮903以及收料轮904,卡盘905形成有挡盘906,料带907下方设置有光纤开关908;同步带用于将同步轮与伺服电机的传动轮进行同步转动,导向轮903带动料带907旋转,卡盘905形成有卡盘905,光纤开关908用于检测是否有产品经过。
具体地,适用于触摸屏的软对硬贴合上下料结构1包括触摸屏吸附组件102,用于液晶屏的自动化贴合设备还包括离子清洗机构13、用于将触摸屏翻转的触摸屏上料翻转平台14、用于将触摸屏从触摸屏上料翻转平台14转运至中间载台17的触摸屏上料机械手搬臂15、用于校正的触摸屏上料相机组件16、用于将触摸屏从中间载台17转运至触摸屏吸附组件102的触摸屏上料移载台18。
具体地,触摸屏上料翻转平台14包括翻板1401、用于放置翻转力度过大的减速机1403、用于翻转触摸屏的翻转电机1404、用于调节高度的滑台气缸1405,滑台气缸1405实现机构稳定升降且可以合理调节高度,翻板1401设置有吸嘴,吸嘴确保触摸屏吸附紧固。
具体地,离子清洗机构13,包括对触摸屏进行一次清洁的离子风棒1301以及用于吹出对触摸屏进行二次清洁的风刀的风扇1302;当触摸屏进行上料,经过离子清洗机构13时,离子风棒1301对触摸屏进行一次清洁,触摸屏进料移载台19经过该结构时风刀对触摸屏进行二次清洁,两次清洁降低产品表面静电和表面异物,提高产品良率。
具体地,触摸屏上料移载台18包括校正载台组件、用于高速传动的笔形气缸以及用于将校正载台组件与底部安装板相对固定布置的弹簧支撑柱。
具体地,触摸屏上料相机组件16对触摸屏进行CCD对位。
具体地,用于液晶屏的自动化贴合设备还包括用于存放光学胶的光学胶叠片上料组件20以及用于取出存放的光学胶的光学胶取料机械手4,光学胶叠片上料组件20具有两个工位,且其中一个工位位于光学胶叠片上料组件20的取料位;采用批量叠片上料,下方采用伺服驱动丝杆模组升降,运动精准,且采用双工位轮换,达到了上OCA料时不停机,机台效率高。
具体地,光学胶取料机械手4由Y轴伺服电机驱动丝杆模组、上料Z轴采用气缸、吸附组件采用抖料气缸吸笔2013组成;模组移动到OCA膜取料位,Z轴气缸下位,抖料气缸下位,吸附组件吸膜,Z轴气缸上位,4个抖料气缸进行抖动分料后气缸复位,Y轴模组至放料位,完成取料。模组实现OCA快速上料,抖料气缸减少上料叠片。
具体地,还包括用于将光学胶转运至光学胶搬运机构取料位的光学胶入料平台2106,光学胶入料平台2106包括可供光学胶取料机械手4放置光学胶的真空平台2101;光学胶入料平台2106由X轴笔形气缸,平台导向气缸,叠片检测组件组成;光学胶上料机械手301Z轴采用滑台气缸1405,吸附组件采用吸嘴;光学胶入料平台2106上料位取料,检测组件检测OCA是否叠片,如叠片,导向气缸竖直旋转抖料后笔形气缸带动平台至下料位(如无叠片,则跳过导向气缸阶段);上料臂至上料位,Z轴气缸下位,吸附组件吸膜,Z轴气缸复位后根据信号下料至1号或2号网箱,成功上料动作;检测组件和导向气缸实现了二次抖料,减少了OCA上料叠片,实现精准上料。
具体地,贴合网箱机构5内部设有用于将光学胶和触摸屏贴合的贴合滚轮;由伺服驱动丝杆模组,导轨,网箱,网板,贴合滚轮组成;丝杆模组带动网箱至OCA上料位上料,到拍照位置拍照对位后到贴合位置,网箱内部伺服带动丝杆模组,贴合滚轮运动,完成贴合。
具体地,用于液晶屏的自动化贴合设备还包括用于转运成品的成品移载平台23;Y轴采用伺服电机带动丝杆模组,实现定位精确,高效率传动;平台使用电动转台,平台可旋转,实现下料前精对位,下料位置统一。
具体地,用于液晶屏的自动化贴合设备还包括用于对产品进行CCD对位的撕膜后上下检测相机机构24。
具体地,用于液晶屏的自动化贴合设备还包括用于将贴有光学胶的触摸屏转运至硬对硬贴合上箱体3222下方的软对硬下料传送搬运臂25。
具体地,真空箱体组件包括用于拍摄触摸屏位置的触摸屏校正相机机构、用于拍摄液晶屏位置的液晶屏校正相机机构。
具体地,抽检机构7,Y轴采用笔形气缸,吸附Z轴采用滑台气缸1405;Z轴十字吸板吸附产品后滑台气缸1405上位,笔型气缸回到下料位,完成抽检;抽检组件实现了不停机进行产品检测,提高生产效率。
具体地,用于液晶屏的自动化贴合设备还包括用于触摸屏上料的硬对硬触摸屏上料机构27101,由龙门焊件支撑,下料臂由Z轴升降气缸、物料吸附吸盘组成,安装在直线电机上可对多个工位载台进行高精度、高速度上料,以此提高生产效率。
具体地,用于液晶屏的自动化贴合设备还包括用于存放触摸屏的硬对硬触摸屏载台28,采用伺服丝杆模组传动,放置板下方轴承弹簧有利于上腔取料时缓冲减小竖直方向摩擦阻力保护产品。
具体地,用于液晶屏的自动化贴合设备还包括硬对硬相机校正机构,两者由龙门焊件支撑,安装于直线电机上可双工位来回拍照提高相机利用率并实现快速精准;液晶屏相机由工件固定通过棱镜进行拍照对位,液晶屏相机竖直对准产品直接拍照光源为其提供合适亮度有利于提升贴合精度。
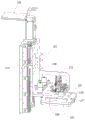
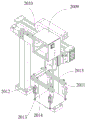
具体地,用于液晶屏的自动化贴合设备还包括用于取液晶屏的液晶屏机械手机构30以及用于限位空盘的空盘限位机构31,整体组件采用伺服带动丝杆模组,X轴采用双龙门架支撑取料机械臂及空料盘下料臂,吸附组件均采用吸嘴;取料时,取料机械臂X、Y轴运动至料盘上方,Z轴气缸下位,根据料盘内液晶屏产品依次取片;当料盘内无液晶屏时,取料盘机械手X轴气缸缩回至料盘位置上方,Z轴下降至料盘,吸附组件吸附后Z轴上升,X轴气缸伸出,空料盘下料至空盘限位机构31内。
用于液晶屏的自动化贴合设备的各个元件分别与控制件电性连接,控制程序并非发明的内容,故不在此赘述。
一种用于液晶屏与触摸屏的贴合结构32,用于贴合液晶屏以及触摸屏,包括真空箱体组件3201、硬对硬校正相机组件、治具组件3214、竖向驱动机构3215、导向组件3216以及X轴微调组件3317;真空箱体组件3201包括硬对硬贴合上箱体组件3202以及硬对硬贴合下箱体组件3203;硬对硬校正相机组件用于对液晶屏以及触摸屏摆放位置进行校正,治具组件3214容置于真空箱体组件3201内且用于放置触摸屏或液晶屏,竖向驱动机构3215用于提供真空箱体开合动力,导向组件3216用于导向真空箱体上抬或者下压,X轴微调组件3317设于真空箱体组件3201上的用于进行位置微调。
通过设置硬对硬校正相机组件可以实时地对触摸屏以及液晶屏进行测量,而竖向驱动机构3215驱动硬对硬贴合上箱体组件3202与硬对硬下箱体组件结合,此时触摸屏与液晶屏则在治具组件3214内完成贴合,如出现贴合误差,直接通过X轴微调组件3317调节触摸屏与液晶屏的贴合位置,简单快捷,贴合效率高,整体结构紧凑,占地面积小。
硬对硬校正相机组件包括用于校正触摸屏位置的触摸屏校正相机组件3204以及用于校正液晶屏的液晶屏校正相机组件3205。
触摸屏校正相机组件3204包括用于设置棱镜的棱镜固定板3206、用于拍摄对位的朝上布置的触摸屏校正相机;液晶屏校正相机组件3205包括用于拍摄对位的液晶屏的直接朝下的液晶屏校正相机、用于直接照射产品的同轴光源3211、用于固定相机以及发出同轴光的光源的竖立固定板、用于移动竖立固定板的液晶屏驱动机构。
治具组件3214包括上治具机构3218以及下治具机构3219,硬对硬贴合上箱体组件3202与上治具机构3218固定布置,硬对硬贴合下箱体组件3203与下治具机构3219固定布置,当硬对硬贴合上箱体组件3202与硬对硬贴合下箱体组件3203压合时,上治具机构3218与下治具机构3219形成密封空间;上治具机构3218具有调节块3220以及缓冲块3221,当上治具机构3218与下治具机构3219贴合时,可以进行调节和缓冲。
硬对硬贴合上箱体组件3202包括硬对硬贴合上箱体3222、用于驱动硬对硬贴合上箱体3222上下移动的竖向驱动机构3215、用于固定硬对硬贴合上箱体3222的硬对硬贴合上箱体3222硬对硬贴合上箱体安装座3224、用于微调硬对硬贴合上箱体3222的X轴位置的X轴微调组件3317。
竖向驱动机构3215包括用于传动的伺服丝杆、用于提供动力的动力元件。
硬对硬贴合下箱体3227硬对硬贴合上箱体安装座3224的下表面形成四根垂直向下的支撑轴3226,硬对硬贴合下箱体3227的上表面布置有四个直线轴承3225,轴承与支撑轴3226活动连接布置;硬对硬贴合下箱体3227硬对硬贴合上箱体安装座3224相对于硬对硬贴合下箱体3227做垂直上下移动。
具体地,硬对硬贴合下箱体组件3203包括硬对硬贴合下箱体3227、用于承放下箱体组件的导轨、用于驱动硬对硬贴合下箱体3227的硬对硬驱动装置3228;硬对硬贴合装置32包括丝杆以及硬对硬伺服电机。
具体地,硬对硬贴合下箱体组件3203还包括设置于硬对硬贴合下箱体3227下方的升降气缸,升降气缸驱使硬对硬贴合下箱体3227上下移动。
竖向驱动机构3215包括竖向伺服电机、用于传动的竖向丝杆以及用于与竖向丝杆相接的导轨。
具体地,连接轴与上真空罩体之间设有一用于防泄漏真空的密封组件。
硬对硬贴合上箱体组件3202由龙门焊件支撑,采用伺服丝杆、DD马达传动可保证对位后快速准确调整至合适位置保证贴合精度,腔体内真空由真空压力表检测,由PLC通过电磁阀的通断控制真空泵达到抽真空贴合,上腔体硬对硬贴合上箱体安装座3224与腔体间通过四个轴穿过直线轴承3225做垂直上下移动,调节块3220及缓冲块3221可调节腔体合适下压量。上腔治具吸板表面有优力胶软板有利于保护产品并且在压合时存在较小间隙便于两板件气体排出有效减少气泡产生。
硬对硬触摸屏以及液晶屏校正相机组件3205,两者由龙门焊件支撑,安装于直线电机上可双工位来回拍照提高相机利用率并实现快速精准。液晶屏相机由工件固定通过棱镜进行拍照对位,液晶屏相机竖直对准产品直接拍照光源为其提供合适亮度有利于提升贴合精度。
硬对硬贴合下箱体组件3203采用伺服丝杆传动可快速精准到达拍照位、贴合位,贴合治具板下方气缸加直线轴承3225使升降动作顺畅平稳、负载均匀分布,对应产品尺寸贴合治具运用使设备能同时对应多类型作业。
一种用于液晶屏与触摸屏的贴合结构32中的各个元件分别与控制件电性连接,控制件的控制程序并非是发明的内容,故不在此赘述。
一种光学胶入料结构,用于对光学胶进行上料,包括光学胶叠片上料组件20、光学胶取料机械手4、光学胶入料平台2106组件;光学胶叠片上料组件20,用于叠放多层光学胶叠片,包括托板2001、光学胶换料底板2002和用于驱动光学胶升降板上下移动的驱动机构,驱动机构包括电机和线性模组,电机与线性模组驱动连接;光学胶换料底板2002的侧周缘还设有多个定位柱2003;光学胶取料机械手4用于取料,光学胶入料平台2106组件用于传递光学胶到光学胶上料机械手301组件,光学胶换料底板2002用于承载液晶屏光学胶叠片,驱动机构用于驱动光学胶升降板上下移动,定位柱2003用于定位光学胶叠片。
通过光学胶叠片上料组件进行光学胶上料,然后由光学胶取料机械手转运光学胶,接着再由光学胶入料平台组件转到可以由光学胶上料机械手组件取走的位置中去,从而实现一体的光学胶取料上料的过程,整个过程无需人工参与,大大增加生产效率。
具体地,光学胶叠片上料机构还包括横向驱动的上料导轨2004以及导轨连接板2005,导轨连接板2005的下表面设置有导块,导块与导轨活动连接,光学胶升降板与驱动机构相对固定布置,导轨设有硬限位机构2006、用于缓冲的上料液压缓冲器2007以及上料笔形气缸2008。
光学胶取料机械手4包括光学胶取料吸附机构2009以及用于装载光学胶取料吸附机构2009的光学胶取料龙门架2010,光学胶吸附机构包括用于吸附光学胶的光学胶取料吸附组件2011,光学胶取料吸附组件2011包括竖直吸附气缸2012、用于吸取光学胶的吸笔2013、用于固定吸笔2013的固定件2014;固定件2014设置有开孔,竖直吸附气缸2012穿设于固定件2014中。
光学胶吸附机构还包括吸附架体2015以及导轨,吸附架体2015与导轨与导轨相对固定布置,吸附架体2015下端形成有安装端,安装端与固定件2014固定布置。
光学胶吸附机构与光学胶取料龙门架2010相对固定布置,光学胶取料吸附机构2009包括取料滑台、电磁阀以及模组连接板,光学胶取料龙门架2010形成有滑轨,取料滑台与滑轨活动连接布置;模组连接板与光学胶取料吸附组件2011相对固定布置,光学胶取料吸附组件2011包括取料架体,取料架体朝下与固定件2014固定布置,朝上与模组连接板固定布置。
具体地,光学胶入料平台2106组件包括X轴笔形气缸、用于调整位置的光学胶旋转气缸2103、用于检查是否叠片的光学胶叠片检测组件2104;光学胶检测组件包括光学胶检测模组2105、用于承放光学胶的光学胶入料平台2106、用于架设光学胶叠片检测模组的导向架2107;光学胶检测模组2105包括对射光纤件以及叠片数显真空表,对射光纤件的出口朝向光学胶入料平台2106。
具体地,光学胶入料平台2106组件还包括两根平行的入料平行滑轨2110、布设于入料平行滑轨2110一端的硬限位机构2006以及用于缓冲光学胶叠片检测组件2104的液压缓冲器,X轴笔形气缸架设于两根入料平行滑轨2110之间;导向架2107下端形成滑块,滑块与入料平行滑轨2110活动连接布置;光学胶入料平台2106具有下端面,光学胶旋转气缸2103布设在光学胶入料平台2106的下端面。
对射光纤件的出口略微高于光学胶入料平台2106,叠片数显真空表与导向架2107固定布置,对射光纤件与叠片数显真空表电性连接。
具体地,光学胶上料机械手301组件包括光学胶上料吸附组件2031、用于提供动力的光学胶上料滑台气缸2032、用于辅助光学胶上料吸附组件2031上下移动的光学胶上料滑动组件2033;光学胶上料吸附组件2031包括上料吸笔2034、用于固定上料吸笔2034的上料固定件2035;上料固定件2035下端形成上料吸附架2036,上料吸笔2034上端与上料吸附架2036固定布置。
具体地,光学胶上料滑动组件2033包括上料滑动导轨2037、控制块2038以及气缸连接板2039,光学胶上料滑台气缸2032与气缸连接板2039固定布置,控制块2038与气缸连接板2039固定布置,控制块2038形成有与上料滑动导轨2037活动连接布置的上料活动滑块。
光学胶入料机构的各个元件与控制件电性连接,控制件的控制程序并非是发明的内容,故不在此赘述。
用于光学胶的重离型下撕膜结构10还有如下一种实施例。
用于光学胶的重离型下撕膜结构10,用于夹持并撕除保护膜,包括用于夹持保护膜的夹持机构1001、用于安装夹爪气缸1002的转接件、布置在Y轴上的用于距离的撕膜滑台气缸1004、控制压合的顶头机构1005、用于检测位置高度的撕膜检测机构1006、用于调整夹爪气缸1002角度的角度微调电机1007;顶头机构1005包括顶头气缸1008以及伸出件,伸出件朝向小耳朵。
在加工中,利用夹持机构来夹持保护膜,并且利用撕膜滑台气缸进行相对位置调节,利用角度微调机构驱动夹紧气缸以对夹持机构的夹持角度进行微调,而且可以通过撕膜检测机构来实现精确的位置高度检测,从而可以根据保护膜对夹持机构的夹持角度进行微调,达到准确夹持并撕除的效果。
还有,用于光学胶的重离型下撕膜结构10,包括布置在X轴上用于驱使夹紧小耳朵的夹爪的夹爪气缸1002;实现小耳朵供料机构位置固定,两侧撕手均能完成取料,实现了夹爪气缸1002的角度可调,方便了能夹取小耳朵,又能转角度去撕触摸屏上的膜片。
具体地,伸出件与顶头气缸1008活动连接布置,撕膜检测机构1006与顶头机构1005固定连接布置,撕膜检测机构1006具有发射口,发射口朝向小耳朵。
具体地,夹持机构1001包括相对设置并形成夹持口的第一夹持块1011和第二夹持块1012以及固定安装于夹爪气缸1002上并与第一夹持块1011和第二夹持块1012滑动配合的导向件,导向件设有供第一夹持块1011和第二夹持块1012滑动的滑动槽。
具体地,第一夹持块1011一端形成有第一夹持滑块,第二夹持块1012一端形成有第二夹持滑块,第一夹持滑块与第二夹持滑块分别与滑动槽活动连接布置。
具体地,第一夹持滑块与第二夹持滑块抵触时,第一夹持块1011与第二夹持块1012有一定距离,第一夹持块1011以及第二夹持块1012呈弯钩状布置。
具体地,角度微调电机1007的驱动轴垂直安装于夹爪气缸1002上。
具体地,驱动机构包括安装于转接件上并带动夹爪气缸1002和夹持机构1001上下移动的竖直滑台气缸1015。
具体地,用于光学胶的重离型下撕膜结构10还包括用于与撕膜滑台气缸1004固定布置的撕膜模组1016,撕膜模组1016包括用于驱动撕膜模组1016前后移动的撕膜驱动电机1017、用于承放模组的撕膜导轨1019、用于承放撕膜驱动电机1017的电机座1018;撕膜驱动电机1017与电机座1018固定布置,电机座1018与撕膜导轨1019的一端固定布置。
具体地,转接件包括用于安装夹爪气缸1002的第一板1020以及沿第一板1020一侧垂直延伸以用于固定安装角度微调电机1007的第二板1021,角度微调电机1007设置于第一板1020和第二板1021形成的L形空间内。
具体地,连接件形成第一板1020,第一板1020上形成有用于限制夹爪气缸1002角度的第一限位块1022以及第二限位块,角度微调电机1007的轴上形成有角度限位柱,角度限位柱与第一限位块1022以及第二限位块触碰时,夹爪气缸1002不再移动。
具体地,竖直滑台气缸1015安装于第一板1020的背面上。
用于光学胶的重离型下撕膜结构10的各个元件分别与控制件电性连接,控制件的控制程序并非是发明的内容,故不在此赘述。
适用于触摸屏的软对硬贴合上下料结构1,对触摸屏进行上下料操作,包括软对硬触摸屏上料机构101、软对硬触摸屏下料机构127以及软对硬贴合龙门机构2,软对硬触摸屏上料机构101包括触摸屏上料吸附组件以及上料模组固定件103,触摸屏上料吸附组件与上料模组固定件103相对固定连接,软对硬触摸屏下料机构127包括下料吸附组件104以及下料模组固定件105,下料吸附组件104与下料模组固定件105相对固定连接,软对硬触摸屏上料机构101以及软对硬触摸屏下料机构127分别与龙门架活动连接。
适用于触摸屏的软对硬贴合上下料结构1,通过设置软对硬触摸屏上料机构101以及软对硬贴合龙门架2,软对硬触摸屏上料机构127的触摸屏上料吸附组件可以吸附触摸屏到加工位,而龙门架可以支撑起软对硬触摸屏上料机构101的移动,而且设置了软对硬触摸屏下料机构127,可以同时吸附触摸屏进行下料,整个过程不需要人工参与,减少产品不良率,提高上料及贴合效率。
上料模组固定件103包括上料模组固定板106、承载板108以及上料模组安装件107,承载板108与上料模组固定板106呈固定布置,上料模组固定板106的后端面形成用于与上料模组安装件107配合布置的滑块,上料模组安装件107形成有导轨,导轨具有与滑块活动连接布置的丝杆。
上料模组安装件107设有用于推动滑块的导轨电机。
上料模组固定板106的一端形成用于承载触摸屏上料吸附组件的承载板108,承载板108上设置有电磁阀以及用于旋转触摸屏上料吸附组件的旋转电机113,触摸屏上料吸附组件包括有朝上延伸布置的插入柱,承载板108形成有承载孔,承载板108与触摸屏上料吸附组件相对固定布置,插入柱穿过承载孔与旋转电机113活动连接布置。
触摸屏上料吸附组件与承载板108具有间隙。
触摸屏上料吸附组件具有上组件116以及吸附件117,上组件116与吸附件117固定布置,上组件116朝上形成插入柱,吸附件117下边形成有吸附面,吸附面吸附触摸屏。
具体地,吸附件117可以与贴合网箱压合布置,对光学胶以及触摸屏进行软对硬贴合。
具体地,下料模组固定件2014包括用于固定模组连接板的模组连接底板118、用于上下移动的丝杆模组、用于控制联轴器的电机以及下料模组固定件105,电机与联轴器的一端固定布置,联轴器的另一端与丝杆模组固定布置,模组连接底板118形成丝杆模组。
具体地,下料模组固定件105形成有滑轨,滑轨与丝杆模组活动连接布置。
具体地,下料模组固定件105包括下料吸附组件104以及用于控制导向气缸的电磁阀,导向气缸与下料吸附组件104固定布置,下料吸附组件104朝下形成下料吸附面,下料吸附面吸附加工后的触摸屏。
具体地,下料模组固定件105的一端形成有滑块,龙门架形成有横向导轨,滑块与横向导轨活动连接布置;龙门架包括拖链盒和拖链,拖链与滑块固定布置,拖链与龙门架相对固定布置。
具体地,上料模组固定件103的一端形成有与横向导轨活动连接布置的上料滑块126。
采用双动子直线模组,两侧4工位分别负责上料和下料,上下料臂均可实现旋转。上料机械手即为上料手臂同时也是软对硬贴合上腔体,使用伺服电机连接减速机1403具有高精度定位功能;下料臂旋转由导向气缸控制,可实现180°旋转。上料臂实现上料的快速稳定,贴合时高精度对位,减少产品不良率,双工位提高上料及贴合效率。
适用于触摸屏的软对硬贴合上下料结构1中的各个元件与控制件电连接,控制程序不属于发明内容,故不阐述。
本实施例中自动贴合设备的整个工作过程为:
1、操作员将放满触摸屏的料盘置与上料治具放置板,触摸屏上料臂从料盘中取料至上料移载吸板,然后触摸屏翻转机构取料至中间移载板。
2、上料搬臂从移载板上取料撕膜经CCD对位至中转治具载台。
3、光学胶置于其放料机构,机械手取光学胶至吸附板,上料机械手从吸附板取光学胶至下腔体网板吸真空。
4、小耳朵上料机构9至取料位,撕膜机构取易撕贴至光学胶边角撕膜检测并抛废膜,上腔体从中转治具载台取触摸屏并于下腔光学胶同时对位拍照完成贴合。
5、重离撕膜机械手取易撕贴,下料臂取已贴合完成产品至撕膜位完成撕膜动作CCD对位放置于中转治具载台准备进入硬对硬环节。
6、液晶屏放置料盘,料盘放置于皮带线。
7、升降组件带动料盘至上料位,取料X Y轴协同使产品移动至治具平台,并搬运至撕膜位,小耳朵上料机构9至取料位,撕膜机构取易撕贴完成撕膜送入定位机构校正。
8、机械手从定位机构取液晶屏至下腔体,另一边机械手取触摸屏至触摸屏移栽台,上腔体吸取,上下腔体经CCD对位至贴合位抽真空贴合。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
Claims (10)
1.一种光学胶入料结构,用于对光学胶进行上料,其特征在于,包括光学胶叠片上料组件、用于取料的光学胶取料机械手、用于传递光学胶到光学胶上料机械手组件的光学胶入料平台组件;所述光学胶叠片上料组件,用于叠放多层光学胶叠片,包括托板、用于承载液晶屏光学胶叠片的光学胶换料底板和用于驱动光学胶升降板上下移动的驱动机构,所述驱动机构包括电机和线性模组,所述电机与所述线性模组电性连接;所述光学胶换料底板的侧周缘还设有用于定位光学胶叠片的多个定位柱。
2.如权利要求1所述的一种光学胶入料结构,其特征在于,所述光学胶叠片上料机构还包括横向驱动的导轨以及导轨连接板,所述导轨连接板的下表面设置有导块,所述导块与所述导轨活动连接,所述光学胶升降板与所述驱动机构相对固定布置,所述导轨设有硬限位机构、用于缓冲的上料液压缓冲器以及上料笔形气缸。
3.如权利要求2所述的一种光学胶入料结构,其特征在于,所述光学胶取料机械手包括光学胶取料吸附机构以及用于装载所述光学胶取料吸附机构的光学胶取料龙门架,所述光学胶吸附机构包括用于吸附光学胶的光学胶取料吸附组件,所述光学胶取料吸附组件包括竖直吸附气缸、用于吸取光学胶的吸笔、用于固定吸笔的固定件;所述固定件设置有开孔,所述竖直吸附气缸穿设于所述固定件中。
4.如权利要求3所述的一种光学胶入料结构,其特征在于,所述光学胶吸附机构还包括吸附架体以及导轨,所述吸附架体与所述导轨相对固定布置,所述吸附架体下端形成有安装端,所述安装端与所述固定件固定布置。
5.如权利要求4所述的一种光学胶入料结构,其特征在于,所述光学胶吸附机构与所述光学胶取料龙门架相对固定布置,所述光学胶取料吸附机构包括取料滑台、电磁阀以及模组连接板,所述光学胶取料龙门架形成有滑轨,所述取料滑台与所述滑轨活动连接布置;所述模组连接板与所述光学胶取料吸附组件相对固定布置,所述光学胶取料吸附组件包括取料架体,所述取料架体朝下与所述固定件固定布置,朝上与所述模组连接板固定布置。
6.如权利要求5所述的一种光学胶入料结构,其特征在于,所述光学胶入料平台组件包括X轴笔形气缸、用于调整位置的光学胶旋转气缸、用于检查是否叠片的光学胶叠片检测组件;所述光学胶检测组件包括光学胶检测模组、用于承放光学胶的光学胶入料平台、用于架设光学胶叠片检测模组的导向架;所述光学胶检测模组包括对射光纤件以及叠片数显真空表,所述对射光纤件的出口朝向所述光学胶入料平台。
7.如权利要求6所述的一种光学胶入料结构,其特征在于,光学胶入料平台组件还包括两根平行的入料平行滑轨、布设于所述入料平行滑轨一端的硬限位机构以及用于缓冲所述光学胶叠片检测组件的液压缓冲器,所述X轴笔形气缸架设于两根所述入料平行滑轨之间;所述导向架下端形成滑块,滑块与所述入料平行滑轨活动连接布置;所述光学胶入料平台具有下端面,光学胶旋转气缸布设在所述光学胶入料平台的下端面。
8.如权利要求7所述的一种光学胶入料结构,其特征在于,所述对射光纤件的出口略微高于光学胶入料平台,所述叠片数显真空表与导向架固定布置,所述对射光纤件与所述叠片数显真空表电性连接。
9.如权利要求8所述的一种光学胶入料结构,其特征在于,所述光学胶上料机械手组件包括光学胶上料吸附组件、用于提供动力的光学胶上料滑台气缸、用于辅助所述光学胶上料吸附组件上下移动的光学胶上料滑动组件;所述光学胶上料吸附组件包括上料吸笔、用于固定所述上料吸笔的上料固定件;所述上料固定件下端形成上料吸附架,所述上料吸笔上端与所述上料吸附架固定布置。
10.如权利要求9所述的一种光学胶入料结构,其特征在于,所述光学胶上料滑动组件包括上料滑动导轨、控制块以及气缸连接板,所述光学胶上料滑台气缸与所述气缸连接板固定布置,所述控制块与所述气缸连接板固定布置,所述控制块形成有与所述上料滑动导轨活动连接布置的上料活动滑块。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920873121.5U CN210590928U (zh) | 2019-06-11 | 2019-06-11 | 一种光学胶入料结构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920873121.5U CN210590928U (zh) | 2019-06-11 | 2019-06-11 | 一种光学胶入料结构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210590928U true CN210590928U (zh) | 2020-05-22 |
Family
ID=70719105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201920873121.5U Active CN210590928U (zh) | 2019-06-11 | 2019-06-11 | 一种光学胶入料结构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210590928U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111747110A (zh) * | 2020-07-20 | 2020-10-09 | 深圳市深科达智能装备股份有限公司 | Oled翻转及转移结构 |
| CN113910207A (zh) * | 2021-09-18 | 2022-01-11 | 浙江杭可科技股份有限公司 | 一种电池搬运机械手 |
-
2019
- 2019-06-11 CN CN201920873121.5U patent/CN210590928U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111747110A (zh) * | 2020-07-20 | 2020-10-09 | 深圳市深科达智能装备股份有限公司 | Oled翻转及转移结构 |
| CN113910207A (zh) * | 2021-09-18 | 2022-01-11 | 浙江杭可科技股份有限公司 | 一种电池搬运机械手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210309464U (zh) | 用于液晶屏的自动化贴合设备 | |
| CN110126429A (zh) | 用于液晶屏的自动化贴合设备 | |
| CN211140812U (zh) | 一种用于光学玻璃片的正反面检测排盘机 | |
| CN210590943U (zh) | 适用于触摸屏的软对硬贴合上下料结构 | |
| CN106733429B (zh) | 点胶贴合机 | |
| CN110126250B (zh) | 一种全自动转盘式贴合设备 | |
| CN110126428A (zh) | 一种用于液晶屏与触摸屏的贴合结构 | |
| CN115971601A (zh) | 一种锂电池与电路板的智能焊接设备 | |
| CN210590928U (zh) | 一种光学胶入料结构 | |
| CN214690400U (zh) | 一种自动贴膜装置 | |
| CN210438045U (zh) | 一种进料调整机构及点胶机 | |
| CN110539545A (zh) | 柔性屏3d贴合设备 | |
| CN210309465U (zh) | 一种用于液晶屏与触摸屏的贴合结构 | |
| CN112850145A (zh) | 一种曲面屏幕裂纹检测设备 | |
| CN212608076U (zh) | 大尺寸式tp转移装置 | |
| CN114799604A (zh) | 全自动焊接设备 | |
| CN110434019B (zh) | 一种用于平板电脑的自动点胶装置 | |
| CN111824769A (zh) | 大尺寸式tp转移装置 | |
| CN210590559U (zh) | 用于光学胶的重离型下撕膜结构 | |
| CN213382979U (zh) | 大尺寸式贴膜结构 | |
| CN212603915U (zh) | 大尺寸偏光贴合机 | |
| CN110662414B (zh) | 一种用于摄像头生产的高速精密贴装系统及方法 | |
| CN111845021A (zh) | 大尺寸偏光贴合机 | |
| CN116764968A (zh) | 一种曲面屏边缘检测装置 | |
| CN114604628B (zh) | 一种机械手利用视觉系统实时纠偏进行玻璃摆放的设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |