CN210364355U - 一种轻量化低能耗无人机 - Google Patents
一种轻量化低能耗无人机 Download PDFInfo
- Publication number
- CN210364355U CN210364355U CN201921075379.7U CN201921075379U CN210364355U CN 210364355 U CN210364355 U CN 210364355U CN 201921075379 U CN201921075379 U CN 201921075379U CN 210364355 U CN210364355 U CN 210364355U
- Authority
- CN
- China
- Prior art keywords
- aerial vehicle
- unmanned aerial
- connecting block
- main part
- rod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Vibration Prevention Devices (AREA)
Abstract
本实用新型公开了一种轻量化低能耗无人机,包括机身主体,所述机身主体的下表面固定安装有控制箱,且控制箱上设有旋转机构,所述旋转机构上设置有摄像头,所述机身主体上固定安装有连接块,且连接块上固定安装有支杆,且支杆的末端设有伸缩杆,且伸缩杆上设有驱动机构,所述机身主体的下表面固定安装有减振支柱,且减振支柱的末端设有支腿。本实用新型所述的一种轻量化低能耗无人机,便于调节整个支杆的长度,可以在不同的要求下使用,提高了装置的实用性,增强了装置在使用时的适应性,可以在无人机降落在地面上时消除地面的反作用力,避免支腿承受地面的方向作用力而损坏,保障支腿的使用寿命。
Description
技术领域
本实用新型涉及无人机领域,特别涉及一种轻量化低能耗无人机。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用;现有的无人机在使用时支杆的长度不可调节,使用时存在一定的局限性,并且现有的无人机降落时直接降落在地面上,长时间使用后支腿易损坏。
实用新型内容
本实用新型的主要目的在于提供一种轻量化低能耗无人机,可以有效解决背景技术中的问题。
为实现上述目的,本实用新型采取的技术方案为:
一种轻量化低能耗无人机,包括机身主体,所述机身主体的下表面固定安装有控制箱,且控制箱上设有旋转机构,所述旋转机构上设置有摄像头,所述机身主体上固定安装有连接块,且连接块上固定安装有支杆,且支杆的末端设有伸缩杆,且伸缩杆上设有驱动机构,所述机身主体的下表面固定安装有减振支柱,且减振支柱的末端设有支腿。
优选的,所述机身主体的内部设置有蓄电池,且机身主体与控制箱之间、机身主体与连接块之间的连接方式均为熔接。
优选的,所述控制箱的内部设置有控制机构,所述旋转机构、驱动机构均通过电线与控制机构电性连接。
优选的,所述连接块上开设有凹槽,且连接块上开设有圆孔,所述支杆的一端设有螺纹装配孔,且支杆的一端位于连接块上的凹槽内,圆孔与螺纹装配孔内设置有装配螺栓,所述支杆通过装配螺栓与连接块固定连接。
优选的,所述连接块、支杆和伸缩杆上均开设有用于电线贯穿的走线孔,且伸缩杆与支杆之间的连接方式为固定连接。
优选的,所述支腿与减振支柱之间的连接方式为焊接,且支腿上套设有防滑橡胶垫。
优选的,所述旋转机构包括旋转座、旋转杆、蜗轮、固定座、微型电机和蜗杆,所述旋转座上设有旋转杆,且旋转杆的上端固定安装有蜗轮,所述固定座上固定安装有微型电机,且微型电机上设有与蜗轮啮合连接的蜗杆。
优选的,所述伸缩杆包括第一调节杆、方形槽、通孔、第二调节杆、方形小块、螺纹孔和紧固螺钉,所述第一调节杆上开设有方形槽,且第一调节杆上设有通孔,所述第二调节杆的一端固定安装有方形小块,且方形小块上开设有螺纹孔,所述紧固螺钉的一端穿过通孔与螺纹孔螺纹连接。
优选的,所述驱动机构包括驱动箱、轴承座、驱动电机、电机轴、转盘和旋转叶,所述驱动箱的上表面中间位置处固定安装有轴承座,且驱动箱的内部设有驱动电机,所述驱动电机上设有电机轴,且电机轴的上端固定安装有转盘,所述转盘上设有旋转叶。
优选的,所述减振支柱包括固定柱、运动柱、振动块、弹簧、限位块和弹性橡胶垫,所述运动柱的下端固定安装有振动块,且振动块与固定柱之间连接有弹簧,所述振动块的下表面固定安装有限位块,且限位块的下表面设有弹性橡胶垫。
与现有技术相比,本实用新型具有如下有益效果:该轻量化低能耗无人机,通过设置的伸缩杆,便于调节整个支杆的长度,可以在不同的要求下使用,提高了装置的实用性,采用减振支柱,可以在无人机降落在地面上时消除地面的方作用力,保障支腿的使用寿命。
附图说明
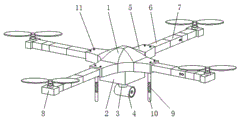
图1为本实用新型一种轻量化低能耗无人机的整体结构示意图;
图2为本实用新型一种轻量化低能耗无人机旋转机构的结构示意图;
图3为本实用新型一种轻量化低能耗无人机预伸缩杆的结构示意图;
图4为本实用新型一种轻量化低能耗无人机驱动机构的内部结构示意图;
图5为本实用新型一种轻量化低能耗无人机减振支柱的内部结构示意图。
图中:1、机身主体;2、控制箱;3、旋转机构;301、旋转座;302、旋转杆;303、蜗轮;304、固定座;305、微型电机;306、蜗杆;4、摄像头;5、连接块;6、支杆;7、伸缩杆;701、第一调节杆;702、方形槽;703、通孔;704、第二调节杆;705、方形小块;706、螺纹孔;707、紧固螺钉;8、驱动机构;801、驱动箱;802、轴承座;803、驱动电机;804、电机轴;805、转盘;806、旋转叶;9、减振支柱;901、固定柱;902、运动柱;903、振动块;904、弹簧;905、限位块;906、弹性橡胶垫;10、支腿;11、装配螺栓。
具体实施方式
为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
如图1-5所示,一种轻量化低能耗无人机,包括机身主体1,机身主体1的下表面固定安装有控制箱2,且控制箱2上设有旋转机构3,旋转机构3上设置有摄像头4,机身主体1上固定安装有连接块5,且连接块5上固定安装有支杆6,且支杆6的末端设有伸缩杆7,且伸缩杆7上设有驱动机构8,机身主体1的下表面固定安装有减振支柱9,且减振支柱9的末端设有支腿10;
机身主体1的内部设置有蓄电池,且机身主体1与控制箱2之间、机身主体1与连接块5之间的连接方式均为熔接;控制箱2的内部设置有控制机构,旋转机构3、驱动机构8均通过电线与控制机构电性连接;连接块5上开设有凹槽,且连接块5上开设有圆孔,支杆6的一端设有螺纹装配孔,且支杆6的一端位于连接块5上的凹槽内,圆孔与螺纹装配孔内设置有装配螺栓11,支杆6通过装配螺栓11与连接块5固定连接;连接块5、支杆6和伸缩杆7上均开设有用于电线贯穿的走线孔,且伸缩杆7与支杆6之间的连接方式为固定连接;支腿10与减振支柱9之间的连接方式为焊接,且支腿10上套设有防滑橡胶垫;旋转机构3包括旋转座301、旋转杆302、蜗轮303、固定座304、微型电机305和蜗杆306,旋转座301上设有旋转杆302,且旋转杆302的上端固定安装有蜗轮303,固定座304上固定安装有微型电机305,且微型电机305上设有与蜗轮303啮合连接的蜗杆306;伸缩杆7包括第一调节杆701、方形槽702、通孔703、第二调节杆704、方形小块705、螺纹孔706和紧固螺钉707,第一调节杆701上开设有方形槽702,且第一调节杆701上设有通孔703,第二调节杆704的一端固定安装有方形小块705,且方形小块705上开设有螺纹孔706,紧固螺钉707的一端穿过通孔703与螺纹孔706螺纹连接;驱动机构8包括驱动箱801、轴承座802、驱动电机803、电机轴804、转盘805和旋转叶806,驱动箱801的上表面中间位置处固定安装有轴承座802,且驱动箱801的内部设有驱动电机803,驱动电机803上设有电机轴804,且电机轴804的上端固定安装有转盘805,转盘805上设有旋转叶806;减振支柱9包括固定柱901、运动柱902、振动块903、弹簧904、限位块905和弹性橡胶垫906,运动柱902的下端固定安装有振动块903,且振动块903与固定柱901之间连接有弹簧904,振动块903的下表面固定安装有限位块905,且限位块905的下表面设有弹性橡胶垫906。
需要说明的是,本实用新型为一种轻量化低能耗无人机,在使用时,工作人员首先将摄像头4安装到控制箱2上的旋转机构3上,并将摄像头4与控制箱2内部的控制机构相连接,然后工作人员将支杆6的一端插入到连接块5上的凹槽中,将装配螺栓11的一端穿过连接块5上的圆孔与支杆6的螺纹装配孔相配合,旋紧装配螺栓11,从而将支杆6与连接块5固定在一起,将控制箱2内的连接线依次穿过连接块5、支杆6以及伸缩杆7上的走线孔,并将连接线与驱动机构8相连接,随后工作人员将驱动机构8安装到伸缩杆7的末端位置处,最后工作人员通过伸缩杆7调节整个无人机支架处的长度,调节时,旋出紧固螺钉707,使得第二调节杆704上的方形小块705可以在第一调节杆701上的方形槽702中移动,从而改变第一调节杆701与第二调节杆704的整体长度,当移动到合适的位置处工作人员将紧固螺钉707穿过通孔703并与相对应的螺纹孔706配合,旋紧紧固螺钉707,固定整个支架的长度,这样整个无人机就组装好了可以使用了,使用之前,工作人员首先对无人机机身主体1内部的蓄电池进行充电,当蓄电池充电完成后,工作人员通过遥控器启动控制箱2,并远程控制控制箱2中的控制机构,控制机构接收遥控器中的指令做出相对应的动作,无人机升空时,在遥控器的控制下,控制箱2发出相应的指令,驱动箱801内的驱动电机803工作带着电机轴804转动,电机轴804在轴承座802内转动带着转盘805转动,从而带着旋转叶806高速旋转,旋转叶806高速旋转时,在气流的作用下具备一个上升的作用力,这样就可以带着整个无人机上升了,当上升到一定的程度后,工作人员通过遥控器控制无人机的高度和方向,打开遥控器上的拍摄按钮,摄像头4开始工作,摄像头4拍摄到的画面传输给控制箱2中的控制机构,最后通过无线传输技术传输到遥控器上的显示屏上显示出来,这样工作人员就可以实时了解拍摄的画面了,需要的时候,工作人员可以通过控制遥控器启动旋转机构3,固定座304上的微型电机305工作带着蜗杆306转动,从而带着蜗轮303一起转动,进而带着旋转座301内的旋转杆302转动,旋转杆302转动就可以带着摄像头4转动了,便于对不同的方向进行拍摄,当无人机使用完成后,工作人员通过遥控器下落无人机,使得无人机落到地面上,无人机在接触地面的一瞬间,支腿10接触地面并承受一个反作用力,此时振动块903与固定柱901之间的弹簧904收缩,运动柱902产生振动,当弹簧904收缩到一定程度后,限位块905上的弹性橡胶垫906接触固定柱901的内部底端,保证弹簧904不会过度压缩,使得弹簧904能够长时间使用,这样减振支柱9就可以抵消掉接触地面这一瞬间产生的反作用力,保证了支腿10的完好,无人机降落到地面上后,关闭掉机身主体1上的开关键即可。
以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
Claims (10)
1.一种轻量化低能耗无人机,其特征在于:包括机身主体(1),所述机身主体(1)的下表面固定安装有控制箱(2),且控制箱(2)上设有旋转机构(3),所述旋转机构(3)上设置有摄像头(4),所述机身主体(1)上固定安装有连接块(5),且连接块(5)上固定安装有支杆(6),且支杆(6)的末端设有伸缩杆(7),且伸缩杆(7)上设有驱动机构(8),所述机身主体(1)的下表面固定安装有减振支柱(9),且减振支柱(9)的末端设有支腿(10)。
2.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述机身主体(1)的内部设置有蓄电池,且机身主体(1)与控制箱(2)之间、机身主体(1)与连接块(5)之间的连接方式均为熔接。
3.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述控制箱(2)的内部设置有控制机构,所述旋转机构(3)、驱动机构(8)均通过电线与控制机构电性连接。
4.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述连接块(5)上开设有凹槽,且连接块(5)上开设有圆孔,所述支杆(6)的一端设有螺纹装配孔,且支杆(6)的一端位于连接块(5)上的凹槽内,圆孔与螺纹装配孔内设置有装配螺栓(11),所述支杆(6)通过装配螺栓(11)与连接块(5)固定连接。
5.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述连接块(5)、支杆(6)和伸缩杆(7)上均开设有用于电线贯穿的走线孔,且伸缩杆(7)与支杆(6)之间的连接方式为固定连接。
6.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述支腿(10)与减振支柱(9)之间的连接方式为焊接,且支腿(10)上套设有防滑橡胶垫。
7.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述旋转机构(3)包括旋转座(301)、旋转杆(302)、蜗轮(303)、固定座(304)、微型电机(305)和蜗杆(306),所述旋转座(301)上设有旋转杆(302),且旋转杆(302)的上端固定安装有蜗轮(303),所述固定座(304)上固定安装有微型电机(305),且微型电机(305)上设有与蜗轮(303)啮合连接的蜗杆(306)。
8.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述伸缩杆(7)包括第一调节杆(701)、方形槽(702)、通孔(703)、第二调节杆(704)、方形小块(705)、螺纹孔(706)和紧固螺钉(707),所述第一调节杆(701)上开设有方形槽(702),且第一调节杆(701)上设有通孔(703),所述第二调节杆(704)的一端固定安装有方形小块(705),且方形小块(705)上开设有螺纹孔(706),所述紧固螺钉(707)的一端穿过通孔(703)与螺纹孔(706)螺纹连接。
9.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述驱动机构(8)包括驱动箱(801)、轴承座(802)、驱动电机(803)、电机轴(804)、转盘(805)和旋转叶(806),所述驱动箱(801)的上表面中间位置处固定安装有轴承座(802),且驱动箱(801)的内部设有驱动电机(803),所述驱动电机(803)上设有电机轴(804),且电机轴(804)的上端固定安装有转盘(805),所述转盘(805)上设有旋转叶(806)。
10.根据权利要求1所述的一种轻量化低能耗无人机,其特征在于:所述减振支柱(9)包括固定柱(901)、运动柱(902)、振动块(903)、弹簧(904)、限位块(905)和弹性橡胶垫(906),所述运动柱(902)的下端固定安装有振动块(903),且振动块(903)与固定柱(901)之间连接有弹簧(904),所述振动块(903)的下表面固定安装有限位块(905),且限位块(905)的下表面设有弹性橡胶垫(906)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921075379.7U CN210364355U (zh) | 2019-07-10 | 2019-07-10 | 一种轻量化低能耗无人机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921075379.7U CN210364355U (zh) | 2019-07-10 | 2019-07-10 | 一种轻量化低能耗无人机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210364355U true CN210364355U (zh) | 2020-04-21 |
Family
ID=70270535
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921075379.7U Expired - Fee Related CN210364355U (zh) | 2019-07-10 | 2019-07-10 | 一种轻量化低能耗无人机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210364355U (zh) |
-
2019
- 2019-07-10 CN CN201921075379.7U patent/CN210364355U/zh not_active Expired - Fee Related
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108622381B (zh) | 一种飞行器用降落缓冲底座 | |
| CN112550682B (zh) | 负表面着陆机构、旋翼无人机及其着陆与起飞方法 | |
| CN211107962U (zh) | 一种测绘无人机用安装支架 | |
| CN110683039A (zh) | 一种城市噪声收集无人机 | |
| CN210455196U (zh) | 一种基于5g联网技术的测绘无人机 | |
| CN210364355U (zh) | 一种轻量化低能耗无人机 | |
| CN108791821B (zh) | 一种多旋翼无人机及其起降系统 | |
| CN214420717U (zh) | 云台系统和可移动平台 | |
| CN211663451U (zh) | 一种旋翼无人机通信平台 | |
| CN215794502U (zh) | 一种用于测绘无人机的云台升降机构 | |
| CN208102312U (zh) | 一种旋转机构、无人机的起落架及机架、无人机 | |
| CN215285259U (zh) | 一种专业巡查用无人机 | |
| CN110461709A (zh) | 一种旋转机构、无人机的起落架及机架、无人机 | |
| CN212530066U (zh) | 一种快递运输用无人机起落机构 | |
| CN211630857U (zh) | 割草无人机 | |
| CN110294106A (zh) | 一种轻量化低能耗无人机 | |
| CN213323660U (zh) | 一种便携式多旋翼无人机 | |
| CN218703959U (zh) | 一种测绘无人机摄像头可调整定位装置 | |
| CN214986034U (zh) | 一种无人机用减震支架 | |
| CN215323262U (zh) | 一种无人机起落架 | |
| CN218662396U (zh) | 一种无人机摄影稳固装置 | |
| CN215205419U (zh) | 一种基于无人车平台发射无人机蜂群的装置 | |
| CN214824152U (zh) | 一种植保无人机药箱安装架 | |
| CN212473901U (zh) | 一种多功能无人机 | |
| CN221660979U (zh) | 一种稳定拍摄的无人机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200421 Termination date: 20210710 |