CN209914532U - 一种高速绿化带自动修剪机 - Google Patents
一种高速绿化带自动修剪机 Download PDFInfo
- Publication number
- CN209914532U CN209914532U CN201822137627.8U CN201822137627U CN209914532U CN 209914532 U CN209914532 U CN 209914532U CN 201822137627 U CN201822137627 U CN 201822137627U CN 209914532 U CN209914532 U CN 209914532U
- Authority
- CN
- China
- Prior art keywords
- vertical
- trimming
- frame
- horizontal
- trimming frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Abstract
本实用新型公开了农业机械技术领域内的一种高速绿化带自动修剪机,包括行走装置和修剪机构,修剪机构包括水平修剪刀、竖直修剪刀一和竖直修剪刀二,行走装置上可升降且可转动地连接有水平修剪架,水平修剪架的下侧设有竖直修剪架一和竖直修剪架二,水平修剪架的下侧开有落料口一和落料口二,竖直修剪架一和竖直修剪架二上分别具有竖直料腔一和竖直料腔二,水平修剪刀设置在水平修剪架的前侧,水平修剪架上设有将水平修剪刀剪下的枝条分别输送至落料口一和落料口二的输送机构,落料口一和竖直料腔一连通,落料口二和竖直料腔二连通,竖直修剪刀一和竖直修剪刀二均朝着行走装置前进的方向设置;本实用新型修剪整齐,修剪后的枝条可回收。
Description
技术领域
本实用新型属于修剪机械技术领域,特别涉及一种高速绿化带自动修剪机。
背景技术
绿化带,指的是供绿化的条形地带。可以消除视觉疲劳、净化环境、美化城市、减少交通事故等作用,在城市中占据着不可取代的重要地位。尤其高速绿化带即保证公路的交通功能,并加强水土保持、视线诱导、标志、指示、防眩、遮蔽等功能,在晚上高速行驶的时候不会被对面的车辆大灯照到眼睛,从而可以安全行驶。
传统修剪高速绿化带时完全依靠人力进行维护修剪,目前存在一些自动化修剪机对高速绿化带进行自动化修剪。现有技术中,公开了专利名称为“一种高速绿化带自动修剪机”,公告号为CN 207978430 U,公告日为20181019,此自动修剪机包括行走装置、竖直升降装置和修剪装置,修剪装置包括电机一、电机二、电机三和电机四、竖直修剪刀一、竖直修剪刀二、顶部修剪刀一和顶部修剪刀二,电机一和电机二固定于修剪刀固定架一和修剪固定架二上,竖直修剪刀一和竖直修剪刀二分别固定于修剪刀固定架一和修剪固定架二上,电机一通过驱动轴一与竖直修剪刀一连接,电机二通过驱动轴二与竖直修剪刀二连接,电机三与顶部修剪刀一通过驱动轴三连接,电机三固定于电机固定架上,电机四与顶部修剪刀二通过驱动轴四连接,电机四固定于电机固定架上,顶部修剪刀一和顶部修剪刀二分别固定于修剪刀固定架三和修剪固定架四上,驱动轴一、驱动轴二、驱动轴三、驱动轴四分别与修剪刀固定架一、修剪固定架二、修剪固定架三和修剪固定架四通过轴承一和轴承二连接,此技术中,行走装置带动修剪装置沿着护栏向前的方向行走,顶部修剪刀一、顶部修剪刀二朝下设置,行走装置边行走边对绿化带进行修剪时,无法将顶部的绿化带修剪整齐,竖直修剪刀一和竖直修剪刀二朝着绿化带所在方向设置,竖直修剪刀一和竖直修剪刀二做同步转动对绿化带上部进行修剪,同时竖直修剪刀一和竖直修剪刀二向前行进,导致有些地方无法修剪到,修剪不整齐,另外,修剪后的枝条直接落在地面上,被吹到高速公路上的枝条难清理,清理工作不安全,增加工作量,成本高。
实用新型内容
本实用新型的目的在于,克服现有技术中的不足之处,提供一种高速绿化带自动修剪机,解决了现有技术中修剪不整齐的技术难题,本实用新型修剪整齐,修剪后的枝条不会落到地面上,减小工作量,降低成本。
本实用新型的目的是这样实现的:一种高速绿化带自动修剪机,包括行走装置和修剪机构,所述修剪机构包括水平修剪刀、竖直修剪刀一和竖直修剪刀二,所述行走装置上可升降且可转动地连接有水平修剪架,所述水平修剪架的下侧设有间隔设置的竖直修剪架一和竖直修剪架二,水平修剪架的下侧开有落料口一和落料口二,竖直修剪架一上具有竖直料腔一,竖直修剪架二上具有竖直料腔二,所述水平修剪刀设置在水平修剪架的前侧,水平修剪架上设有将水平修剪刀剪下的枝条分别输送至落料口一和落料口二的输送机构,所述落料口一和竖直料腔一连通,所述落料口二和竖直料腔二连通,在左右方向上,所述竖直修剪刀一竖直设置在竖直修剪架一朝里的一侧,所述竖直修剪刀二竖直设置在竖直修剪架二朝里的一侧,竖直修剪刀一和竖直修剪刀二均朝着行走装置前进的方向设置。
本实用新型中的水平修剪刀、竖直修剪刀一和竖直修剪刀二分别为三个电动修枝机或电动绿篱机的修剪部,修剪部之外的部分固定在水平修剪架上;修剪绿化带前,行走装置行走,水平修剪架在行走装置的前方,靠近绿化带时,控制水平修剪架转动,使水平修剪架转动到行走装置的侧边,上升水平修剪架,使竖直修剪架一和竖直修剪架二的底侧高于防护栏,当水平修剪架在最近的绿化带正上方时,控制水平修剪架下降,水平修剪架下降至设定的距离时,保证水平修剪刀与绿化带的上部接触;本实用新型工作时,水平修剪刀对绿化带的顶部进行修剪,竖直修剪刀一和竖直修剪刀二对绿化带的左右两侧进行修剪,水平修剪刀修剪下来的枝条经输送机构往后输送,剪下的枝条沿着落料口一和落料口二分别落到竖直料腔一和竖直料腔二内,行走装置持续行走,竖直修剪刀一和竖直修剪刀二将绿化带左右两侧修剪下来的枝条直接分别进入竖直料腔一和竖直料腔二内,实现枝条的回收;本实用新型通过水平修剪刀、竖直修剪刀一和竖直修剪刀二的设置实现矩形绿化带的修剪,使绿化带更加整齐,修剪下来的枝条进入竖直料腔一和竖直料腔二内,实现修剪枝条的回收;可应用于修剪矩形绿化带的工作中。
为了将水平修剪刀剪下的枝条输送到水平修剪架内,所述水平修剪架的一端为进料口,水平修剪架的另一端封闭,所述输送机构包括可转动地连接在水平修剪架上的两个转动盘,两个转动盘朝里的一侧排布有若干拨片,所述拨片围绕转动盘的转动中心转动,拨片转动时,始终至少有一个拨片的朝外的一侧在水平修剪刀的前方;水平修剪刀后方的水平修剪架上可转动地连接有螺旋轴,所述螺旋轴在长度方向上的中心往外的方向上分别连接有旋向相反的螺旋叶片一和螺旋叶片二,所述螺旋叶片一向落料口一延伸,螺旋叶片二向落料口二延伸;此设计中,拨片将水平修剪刀剪下的枝条拨进进料口内,控制螺旋轴的转动方向,使拨进水平修剪架内的枝条从中部往左右两端输送,分别从落料口一和落料口二下落,从落料口一落下的枝条进入竖直料腔一内,从落料口二落下的枝条进入竖直料腔二内。
为了更加顺畅地回收被剪下的枝条,所述竖直修剪架一的下部可转动地连接有粉碎刀轴一,所述粉碎刀轴一上至少设有一把粉碎动刀一,竖直料腔一底侧对应的竖直修剪架一上设有若干粉碎定刀一,在长度方向上,一把粉碎动刀一在两把粉碎定刀一之间;所述竖直修剪架二的下部可转动地连接有粉碎刀轴二,所述粉碎刀轴二上设有至少一把粉碎动刀二,竖直料腔二底侧对应的竖直修剪架二上设有若干粉碎定刀二,在长度方向上,一把粉碎动刀二在两把粉碎定刀二之间;此设计中,粉碎刀轴一和粉碎刀轴二高速旋转,粉碎动刀一和粉碎定刀一将落在竖直料腔一内的枝条进一步粉碎动刀二和粉碎定刀一将落在竖直料腔二内的枝条进一步粉碎,粉碎后的枝屑更加容易回收。
为了进一步提高枝条回收工作的可靠性,所述竖直修剪架一的前侧设有固定支撑挡板一,所述固定支撑挡板一远离竖直修剪刀一,固定支撑挡板一的下部可转动地连接有输送带一,所述输送带一上设有向上凸起的摩擦齿一,所述摩擦齿一的上侧不低于竖直料腔一的底侧,输送带一将落到输送带一上的树枝输送到竖直料腔一内;所述竖直修剪架二的前侧设有固定支撑挡板二,所述固定支撑挡板二远离竖直修剪刀二,固定支撑挡板二的下部可转动地连接有输送带二,所述输送带二上设有向上凸起的摩擦齿二,所述摩擦齿二的上侧不低于竖直料腔二的底侧,输送带二将落到输送带二上的树枝输送到竖直料腔二内;此设计中,从落料口一落下的枝条经输送带一运输至竖直料腔一内,从落料口二落下的枝条经输送带二运输至竖直料腔二内,摩擦齿增加枝条与输送带之间的摩擦力,防止枝条被吹到地面上。
为了实现枝屑的出料,所述粉碎刀轴一后方的竖直修剪架一上开有与外部环境连通的出料口一,所述粉碎刀轴二后方的竖直修剪架二上开有与外部环境连通的出料口二,出料口一的底侧不高于粉碎刀轴一的底侧,出料口二的底侧不高于粉碎刀轴二的底侧。
为了实现枝屑的回收,所述行走装置上设有离心风机和收集装置,所述离心风机的吸风口连接有吸风管一和吸风管二,吸风管一远离离心风机的一端与竖直修剪架一连接,吸风管一与出料口一连通,吸风管二远离离心风机的一端与竖直修剪架二连接,吸风管二与出料口二连通;所述离心风机将排出的枝屑排至收集装置;此设计中,离心风机将竖直料腔一内的枝屑依次沿着出料口一和吸风管一吸进离心风机内,离心风机将竖直料腔二内的枝屑依次沿着出料口二和吸风管二吸进离心风机内,离心风机将吸进来的枝屑排到收集装置内收集起来。
为了进一步提高枝条回收的可靠性,所述竖直修剪架一的内侧设有向输送带一所在方向倾斜的导料板一,导料板一在竖直料腔一内;所述竖直修剪架二的内侧设有向输送带二所在方向倾斜的导料板二,导料板二在竖直料腔二内;此设计中,导料板一将落料口一落下的枝条到输送带一上,导料板二将落料口二落下的枝条到输送带二上,输送带一将枝条输送到粉碎动刀一和粉碎定刀一下,输送带二将枝条输送到粉碎动刀二和粉碎定刀二下,使落下的枝条全部粉碎,粉碎后形成的枝屑更容易被吸走收集。
为了实现水平修剪架的转动和升降,所述行走装置的前侧固连有支撑座,所述支撑座上可转动地连接有转动板,转动板上侧固定设有固定套,所述固定套内可滑动地设有升降杆,所述升降杆的上侧铰接支撑架的一端,所述支撑架的另一端铰接有连接架,水平修剪架固定在连接架下侧。
为了实现水平修剪架水平度的调整,所述升降杆的外侧铰接有直线驱动器一,直线驱动器一上连接有可做往复直线运动的伸缩杆一,所述伸缩杆一与支撑架铰接;所述支撑架远离升降杆所在一端铰接有直线驱动器二,直线驱动器二上连接有可做往复直线运动的伸缩杆二,所述伸缩杆二与连接架的上部铰接,伸缩杆二在支撑架与连接架铰接处的上方。
附图说明
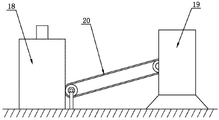
图1为本实用新型的主视图。
图2为图1中A处的局部放大图 。
图3为本实用新型的立体结构图一。
图4为图2中B处的局部放大图。
图5为本实用新型中修剪机构的立体结构图一。
图6为本实用新型中修剪机构的立体结构图二。
图7为图6中C处的局部放大图。
图8为本实用新型中修剪机构的立体结构图三。
图9为图8中D处的局部放大图。
图10为本实用新型的立体结构图二。
图11为图2中E处的局部放大图。
图12为本实用新型中旋风分离器与打包机连接的结构简图。
其中,1修剪机构,101输送带一,102粉碎定刀一,103驱动电机一,104粉碎刀轴一,105粉碎电机一,106粉碎动刀一,107竖直修剪架一,108导料板一,109出料口一,110固定支撑挡板一,111竖直料腔一,112驱动电机二,113输送带二,114出料口二,115竖直料腔二,116导料板二,117粉碎电机二,118螺旋叶片二,119螺旋叶片一,120螺旋轴,121拨片,122驱动转轴,123转动盘,124竖直修剪刀一,125摩擦齿一,126主动轮一,127从动轮一,128输送电机,129拨动电机,130摩擦齿二,131从动轮二,132主动轮二,133竖直修剪架二,134竖直修剪刀二,135粉碎动刀二,136固定支撑挡板二,137水平修剪架,138粉碎定刀二,139粉碎刀轴二,140水平修剪刀,2直线驱动器一,3固定套,4支撑座,5液压站,6行走装置,7升降杆,8支撑架,9直线驱动器二,10连接架,11电控箱,12液压马达,13转动板,14传动齿轮,15转动轴,16从动齿轮,17离心风机,18旋风分离器,19打包机,20输送装置,21驱动装置,22落料口一,23落料口二。
具体实施方式
下面结合附图对本实用新型进行进一步说明。
如图1~12所示的一种高速绿化带自动修剪机,包括行走装置6,修剪机构1,修剪机构1包括水平修剪刀140、竖直修剪刀一124和竖直修剪刀二134,行走装置6上可升降且可转动地连接有水平修剪架137,水平修剪架137的下侧设有间隔设置的竖直修剪架一107和竖直修剪架二133,竖直修剪架一107在水平修剪架137的左侧,竖直修剪架二133在水平修剪架137的右侧,水平修剪架137的下侧开有落料口一22和落料口二23,竖直修剪架一107上具有竖直料腔一111,竖直修剪架二133上具有竖直料腔二115,水平修剪刀140设置在水平修剪架137的前侧,水平修剪架137上设有将水平修剪刀140剪下的枝条分别输送至落料口一22和落料口二23的输送机构,落料口一22和竖直料腔一111连通,落料口二23和竖直料腔二115连通,在左右方向上,竖直修剪刀一124竖直设置在竖直修剪架一107朝里的一侧,竖直修剪刀二134竖直设置在竖直修剪架二133朝里的一侧,竖直修剪刀一124和竖直修剪刀二134均朝着行走装置6前进的方向设置;为了将水平修剪刀140剪下的枝条输送到水平修剪架137内,水平修剪架137的一端为进料口,水平修剪架137的另一端封闭,输送机构包括固连在水平修剪架137外侧固连有拨动电机129,水平修剪架137上可转动地连接有驱动转轴122,拨动电机129与驱动转轴122传动连接,水平修剪架137内,驱动转轴122的两端分别连接有一个转动盘123,两个转动盘123朝里的一侧排布有若干拨片121,拨片121围绕转动盘123的转动中心转动,拨片121转动时,始终至少有一个拨片121的朝外的一侧在水平修剪刀140的前方;水平修剪架137的外侧还固连有输送电机128,水平修剪刀140后方的水平修剪架137上可转动地连接有螺旋轴120,输送电机128与螺旋轴120传动连接,螺旋轴120在长度方向上的中心往外的方向上分别连接有旋向相反的螺旋叶片一119和螺旋叶片二118,螺旋叶片一119向落料口一22延伸,螺旋叶片二118向落料口二23延伸;为了更加顺畅地回收被剪下的枝条,竖直修剪架一107的下部固连有粉碎电机一105,粉碎电机一105上可转动地连接有粉碎刀轴一104,粉碎刀轴一104上排布有两把粉碎动刀一106,竖直料腔一111底侧对应的竖直修剪架一107上设有三把粉碎定刀一102,在长度方向上,一把粉碎动刀一106在两把粉碎定刀一102之间,粉碎定刀一102在粉碎刀轴一104的正下方;竖直修剪架二133的下部固连有粉碎电机二117,粉碎电机二117上可转动地连接有粉碎刀轴二139,粉碎刀轴二139上设有至少一把粉碎动刀二135,本实施例中,粉碎刀轴二139上排布有两把粉碎动刀二135,竖直料腔二115底侧对应的竖直修剪架二133上设有三把粉碎定刀二138,在长度方向上,每把粉碎动刀二135在两把粉碎定刀二138之间,粉碎定刀二138在粉碎刀轴二139的正下方。
为了进一步提高枝条回收工作的可靠性,竖直修剪架一107的前侧设有固定支撑挡板一110,固定支撑挡板一110和竖直支撑挡板一设为一体,在左右方向上,固定支撑挡板一110远离竖直修剪刀一124,固定支撑挡板一110的下部固连有驱动电机一103,驱动电机一103上可转动地连接有主动轮一126,主动轮一126经输送带一101与从动轮一127传动连接,输送带一101上设有向上凸起的摩擦齿一125,摩擦齿一125的上侧不低于竖直料腔一111的底侧,输送带一101将落到输送带一101上的树枝输送到竖直料腔一111内;竖直修剪架二133的前侧设有固定支撑挡板二136,固定连接架10二和竖直修剪架二133设为一体,在左右方向上,固定支撑挡板二136远离竖直修剪刀二134,固定支撑挡板二136的下部固连有驱动电机二112,驱动电机二112上可转动地连接有主动轮二132,主动轮二132经输送带二113与从动轮二131传动连接,输送带二113上设有向上凸起的摩擦齿二130,摩擦齿二130的上侧不低于竖直料腔二115的底侧,输送带二113将落到输送带二113上的树枝输送到竖直料腔二115内。
为了实现枝屑的出料,粉碎刀轴一104后方的竖直修剪架一107上开有与外部环境连通的出料口一109,粉碎刀轴二139后方的竖直修剪架二133上开有与外部环境连通的出料口二114,出料口一109的底侧不高于粉碎刀轴一104的底侧,出料口二114的底侧不高于粉碎刀轴二139的底侧;为了实现枝屑的回收,行走装置6上设有离心风机17和收集装置,离心风机17的吸风口连接有吸风管一和吸风管二,吸风管一远离离心风机17的一端与竖直修剪架一107连接,吸风管一与出料口一109连通,吸风管二远离离心风机17的一端与竖直修剪架二133连接,吸风管二与出料口二114连通(吸风管一一端与竖直修剪架一107连接,吸风管一的另一端连接三通管的一端,吸风管二的一端与竖直修剪架二133连接,三通管的另外两端分别与吸风管二的另一端和离心风机17的吸风口连接,(其中的管路(吸风管一、吸风管二和三通管构成管路)连接均为现有技术,在附图中没有画出管路结构,在此说明以便理解);离心风机17将排出的枝屑排至收集装置,收集装置包括旋风分离器18和打包机19,离心风机17经管道与旋风分离器18连接,旋风分离器18将气体排出,枝屑从旋风分离器18的出料端输出,输出的枝屑经输送装置20进入打包机19进行压缩打包,实现枝屑的回收,离心风机17、旋风分离器18、输送装置20和打包机19均为现有技术,在本申请文本中不再赘述,输送装置20可为由电机驱动动作的传送带,旋风分离器18输出的枝屑落在传送带上,传送带经枝屑输送到打包机19内;竖直修剪架一107的内侧设有向输送带一101所在方向倾斜的导料板一108,导料板一108在竖直料腔一111内;竖直修剪架二133的内侧设有向输送带二113所在方向倾斜的导料板二116,导料板二116在竖直料腔二115内。
为了实现水平修剪架137的转动和升降,行走装置6的前侧固连有支撑座4,支撑座4上设有液压站5,支撑座4上可转动地连接有转动板13,支撑座4下侧设有液压马达12,液压马达12上传动连接有传动齿轮14,支撑座4上可转动地连接有转动轴15,传动齿轮14上啮合有从动齿轮16,从动齿轮16与转动轴15连接,传动齿轮14为外齿轮,从动齿轮16为内齿轮,转动轴15与转动板13连接,转动板13上侧固定设有固定套3,固定套3内设有驱动装置21,驱动装置21优选为液压缸,固定套3内可滑动地设有升降杆7,液压缸驱动升降杆7做上下往复直线运动(通过液压缸驱动升降杆7做升降动作的结构为现有技术,在本申请的图1中只有液压缸与升降杆7连接的结构简图,无需再赘述),升降杆7的上侧铰接支撑架8的一端,支撑架8的另一端铰接有连接架10,水平修剪架137固定在连接架10下侧;升降杆7的外侧铰接有直线驱动器一2,直线驱动器一2上连接有可做往复直线运动的伸缩杆一,伸缩杆一与支撑架8铰接;支撑架8远离升降杆7所在一端铰接有直线驱动器二9,直线驱动器二9上连接有可做往复直线运动的伸缩杆二,伸缩杆二与连接架10的上部铰接,伸缩杆二在支撑架8与连接架10铰接处的上方;本实施例中,直线驱动器一2和直线驱动器二9优选为液压缸,通过支撑座4上的控制系统控制液压站5以控制液压缸的动作。
本实用新型中的水平修剪刀140、竖直修剪刀一124和竖直修剪刀二134分别为三个电动修枝机或电动绿篱机(为了描述方便,在此称为电动修剪机)的修剪部,修剪部之外的部分固定在水平修剪架137上;另外,行走装置6的驾驶室内设有控制器,转动板13上侧设有电控箱11,控制器将控制信号发送给电控箱11,电控箱11通过液压站5控制液压马达12及各个液压缸的动作,电控箱11还控制电动修剪机、拨动电机129、输送电机128、驱动电机一103、驱动电机二112、粉碎电机一105和粉碎电机二117的动作;修剪绿化带前,行走装置6行走,水平修剪架137在行走装置6的前方,靠近绿化带时,控制水平修剪架137转动,使水平修剪架137转动到行走装置6的侧边,上升水平修剪架137,使竖直修剪架一107和竖直修剪架二133的底侧高于防护栏,当水平修剪架137在最近的绿化带正上方时,控制水平修剪架137下降,水平修剪架137下降至设定的距离时,保证水平修剪刀140与绿化带的上部接触;控制直线驱动器一2和直线驱动器二9的动作,使水平修剪刀140水平,此时竖直修剪刀一124和竖直修剪刀二134均处于竖直状态,直线驱动器一2和直线驱动器二9停止动作;本实用新型工作时,拨动电机129、输送电机128一、输送电机128二、粉碎电机一105、粉碎电机二117、离心风机17、旋风分离器18和打包机19开动动作,水平修剪刀140对绿化带的顶部进行修剪,竖直修剪刀一124和竖直修剪刀二134对绿化带的左右两侧进行修剪,拨动电机129驱动驱动转轴122转动,驱动转轴122带动转动盘123转动,转动盘123转动带动拨片121的转动,控制拨动电机129的动作方向使拨片121向前转动,拨片121将水平修剪刀140修剪下来的枝条拨进水平修剪架137内,进入水平修剪架137内的枝条经螺旋叶片一119和螺旋叶片二118分别输送至落料口一22和落料口二23,枝条沿着落料口一22和落料口二23分别落到竖直料腔一111和竖直料腔二115内,沿着导料板一108滑下的枝条落到输送带一101上,沿着导料板二116滑下的枝条落到输送带二113上,行走装置6持续行走,竖直修剪刀一124和竖直修剪刀二134将绿化带左右两侧修剪下来的枝条分别落到输送带一101和输送带二113上,控制驱动电机一103和驱动电机二112的动作方向,使输送带一101和输送带二113将枝条往后输送,输送到竖直料腔一111内的枝条在粉碎动刀一106和粉碎定刀一102的作用下粉碎,输送到竖直料腔二115内的枝条在粉碎动刀二135和粉碎定刀二138的作用下粉碎,离心风机17将粉碎后的枝屑经吸风管一和吸风管二吸走,离心风机17将吸走的枝屑经输送管送至旋风分离器18内,旋风分离器18将气体排出,将枝屑排出,排出的枝屑经输送装置20输送至打包机19内进行压缩打包,实现枝屑的完整回收;本实用新型在工作前,修剪机构1在行走装置6的前方,不影响其它车辆的行驶,需要修剪时,修剪机构1转动至绿化带所在一端,升降修剪机构1使修剪工作可靠进行,水平修剪刀140的水平度可调,修剪时,水平修剪刀140水平,竖直修剪刀一124和竖直修剪刀二134竖直,使绿化带更加整齐,修剪下来的枝条在输送带一101和输送带二113的作用下进入竖直料腔一111和竖直料腔二115内,进入竖直料腔一111和竖直料腔二115内的枝条经粉碎动刀一106和粉碎定刀一102粉碎,粉碎后的枝屑被吸走,实现枝屑的回收,修剪后的枝条不会落到地面上,减小工作量,降低成本;可应用于修剪矩形绿化带的工作中。
本实用新型并不局限于上述实施例,在本实用新型公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本实用新型的保护范围内。
Claims (7)
1.一种高速绿化带自动修剪机,包括行走装置,其特征在于,还包括修剪机构,所述修剪机构包括水平修剪刀、竖直修剪刀一和竖直修剪刀二,所述行走装置的前侧固连有支撑座,所述支撑座下侧设有液压马达,液压马达上传动连接有传动齿轮,支撑座上可转动地连接有转动轴,转动轴上连接有转动板,传动齿轮上啮合有从动齿轮,从动齿轮与转动轴连接,传动齿轮为外齿轮,从动齿轮为内齿轮,转动板上侧固定设有固定套,所述固定套内可滑动地设有升降杆,所述升降杆的上侧铰接支撑架的一端,所述支撑架的另一端铰接有连接架,所述升降杆的外侧铰接有直线驱动器一,直线驱动器一上连接有可做往复直线运动的伸缩杆一,所述伸缩杆一与支撑架铰接;所述支撑架远离升降杆所在一端铰接有直线驱动器二,直线驱动器二上连接有可做往复直线运动的伸缩杆二,所述伸缩杆二与连接架的上部铰接,伸缩杆二在支撑架与连接架铰接处的上方,连接架下侧固定连接有水平修剪架,所述水平修剪架的下侧设有间隔设置的竖直修剪架一和竖直修剪架二,水平修剪架的下侧开有落料口一和落料口二,竖直修剪架一上具有竖直料腔一,竖直修剪架二上具有竖直料腔二,所述水平修剪刀设置在水平修剪架的前侧,水平修剪架上设有将水平修剪刀剪下的枝条分别输送至落料口一和落料口二的输送机构,所述落料口一和竖直料腔一连通,所述落料口二和竖直料腔二连通,在左右方向上,所述竖直修剪刀一竖直设置在竖直修剪架一朝里的一侧,所述竖直修剪刀二竖直设置在竖直修剪架二朝里的一侧,竖直修剪刀一和竖直修剪刀二均朝着行走装置前进的方向设置。
2.根据权利要求1所述的一种高速绿化带自动修剪机,其特征在于,所述水平修剪架的一端为进料口,水平修剪架的另一端封闭,所述输送机构包括可转动地连接在水平修剪架上的两个转动盘,两个转动盘朝里的一侧排布有若干拨片,所述拨片围绕转动盘的转动中心转动,拨片转动时,始终至少有一个拨片的朝外的一侧在水平修剪刀的前方;水平修剪刀后方的水平修剪架上可转动地连接有螺旋轴,所述螺旋轴在长度方向上的中心往外的方向上分别连接有旋向相反的螺旋叶片一和螺旋叶片二,所述螺旋叶片一向落料口一延伸,螺旋叶片二向落料口二延伸。
3.根据权利要求1所述的一种高速绿化带自动修剪机,其特征在于,所述竖直修剪架一的下部可转动地连接有粉碎刀轴一,所述粉碎刀轴一上至少设有一把粉碎动刀一,竖直料腔一底侧对应的竖直修剪架一上设有若干粉碎定刀一,在长度方向上,一把粉碎动刀一在两把粉碎定刀一之间;所述竖直修剪架二的下部可转动地连接有粉碎刀轴二,所述粉碎刀轴二上设有至少一把粉碎动刀二,竖直料腔二底侧对应的竖直修剪架二上设有若干粉碎定刀二,在长度方向上,一把粉碎动刀二在两把粉碎定刀二之间。
4.根据权利要求1所述的一种高速绿化带自动修剪机,其特征在于,所述竖直修剪架一的前侧设有固定支撑挡板一,所述固定支撑挡板一远离竖直修剪刀一,固定支撑挡板一的下部可转动地连接有输送带一,所述输送带一上设有向上凸起的摩擦齿一,所述摩擦齿一的上侧不低于竖直料腔一的底侧,输送带一将落到输送带一上的树枝输送到竖直料腔一内;所述竖直修剪架二的前侧设有固定支撑挡板二,所述固定支撑挡板二远离竖直修剪刀二,固定支撑挡板二的下部可转动地连接有输送带二,所述输送带二上设有向上凸起的摩擦齿二,所述摩擦齿二的上侧不低于竖直料腔二的底侧,输送带二将落到输送带二上的树枝输送到竖直料腔二内。
5.根据权利要求3所述的一种高速绿化带自动修剪机,其特征在于,所述粉碎刀轴一后方的竖直修剪架一上开有与外部环境连通的出料口一,所述粉碎刀轴二后方的竖直修剪架二上开有与外部环境连通的出料口二,出料口一的底侧不高于粉碎刀轴一的底侧,出料口二的底侧不高于粉碎刀轴二的底侧。
6.根据权利要求5所述的一种高速绿化带自动修剪机,其特征在于,所述行走装置上设有离心风机和收集装置,所述离心风机的吸风口连接有吸风管一和吸风管二,吸风管一远离离心风机的一端与竖直修剪架一连接,吸风管一与出料口一连通,吸风管二远离离心风机的一端与竖直修剪架二连接,吸风管二与出料口二连通;所述离心风机将排出的枝屑排至收集装置。
7.根据权利要求4所述的一种高速绿化带自动修剪机,其特征在于,所述竖直修剪架一的内侧设有向输送带一所在方向倾斜的导料板一,导料板一在竖直料腔一内;所述竖直修剪架二的内侧设有向输送带二所在方向倾斜的导料板二,导料板二在竖直料腔二内。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201822137627.8U CN209914532U (zh) | 2018-12-19 | 2018-12-19 | 一种高速绿化带自动修剪机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201822137627.8U CN209914532U (zh) | 2018-12-19 | 2018-12-19 | 一种高速绿化带自动修剪机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN209914532U true CN209914532U (zh) | 2020-01-10 |
Family
ID=69064628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201822137627.8U Active CN209914532U (zh) | 2018-12-19 | 2018-12-19 | 一种高速绿化带自动修剪机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN209914532U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111758412A (zh) * | 2020-07-14 | 2020-10-13 | 嘉兴市茂景园林有限公司 | 一种统一标准多功能的绿化带修剪机构 |
| CN112772179A (zh) * | 2021-01-12 | 2021-05-11 | 南京奔卓网络科技有限公司 | 一种高速公路道路两旁灌木林修剪装置 |
-
2018
- 2018-12-19 CN CN201822137627.8U patent/CN209914532U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111758412A (zh) * | 2020-07-14 | 2020-10-13 | 嘉兴市茂景园林有限公司 | 一种统一标准多功能的绿化带修剪机构 |
| CN112772179A (zh) * | 2021-01-12 | 2021-05-11 | 南京奔卓网络科技有限公司 | 一种高速公路道路两旁灌木林修剪装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111480470A (zh) | 一种市政绿化免二次清扫的绿植修剪设备及实施方式 | |
| CN109452020A (zh) | 一种修剪矩形绿化带的修剪装置 | |
| CN209914532U (zh) | 一种高速绿化带自动修剪机 | |
| CN209914530U (zh) | 一种用于修剪矩形绿化带的修剪机 | |
| CN209914531U (zh) | 一种修剪矩形绿化带的修剪装置 | |
| CN108738655B (zh) | 一种往复切割式玫瑰剪枝还田机 | |
| CN207505509U (zh) | 一种植物根系剪切装置 | |
| CN207885208U (zh) | 一种甘蔗收割机 | |
| CN209609294U (zh) | 一种公路中分带矩形修剪机构 | |
| CN109429763A (zh) | 一种剪切机 | |
| CN210275171U (zh) | 自走式秸秆捡拾饲料打捆机 | |
| CN209949938U (zh) | 一种用于平茬机的切割装置 | |
| CN106134629A (zh) | 自动化韭菜收割机 | |
| CN206559843U (zh) | 一种手推式玉米杆收割装置 | |
| CN106688429A (zh) | 一种沙棘枝条收割粉碎联合装置 | |
| CN109452022A (zh) | 一种用于修剪矩形绿化带的修剪机 | |
| CN108401704B (zh) | 一种轮履组合式玫瑰剪枝机 | |
| CN109452021A (zh) | 一种高速绿化带自动修剪机 | |
| CN110786164B (zh) | 一种多功能修剪作业机 | |
| CN216218825U (zh) | 一种韭菜花及韭菜采收机 | |
| CN108748310A (zh) | 一种肉丁切割机 | |
| CN204598756U (zh) | 一种茶树修剪机 | |
| CN108739082A (zh) | 双孢蘑菇菇床用割菇车 | |
| CN108718758A (zh) | 一种粉碎还田式玫瑰剪枝机 | |
| CN209609295U (zh) | 一种修剪收集装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |