CN203649200U - 一种搬运及码垛机械手 - Google Patents
一种搬运及码垛机械手 Download PDFInfo
- Publication number
- CN203649200U CN203649200U CN201420038476.XU CN201420038476U CN203649200U CN 203649200 U CN203649200 U CN 203649200U CN 201420038476 U CN201420038476 U CN 201420038476U CN 203649200 U CN203649200 U CN 203649200U
- Authority
- CN
- China
- Prior art keywords
- telescopic arm
- connects
- column
- screw mandrel
- mechanical arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Manipulator (AREA)
Abstract
本实用新型公开了一种搬运及码垛机械手,该搬运及码垛机械手常用于产品的取放、传送,其包括底座,所述底座上设有升降机构,所述升降机构上安装有可升降的伸缩臂固定座,所述伸缩臂固定座上安装有在水平方向伸缩的伸缩臂,所述伸缩臂的端部设有吸盘,所述底座上设有两条沿竖直方向设置的导轨,所述伸缩臂固定座设有两条沿竖直方向设置的导轨槽,该伸缩臂固定座通过导轨槽与导轨联接。由于本实用新型的搬运及码垛机械手在升降过程中不容易产生晃动,从而提高了搬运及码垛机械手取放产品的精确性。底座配重达到300KG,所述伸缩臂负载能力达到30KG,移动半径范围可达2米。
Description
技术领域
本实用新型涉及一种机械手臂,特别涉及一种搬运及码垛机械手,该搬运及码垛机械手常用于产品的取放、传送。
背景技术
搬运及码垛机械手是在自动化设备的基础上,根据冲压生产特点,专门为实现冲压自动化无人生产而研发的设备。能取代人工在各个冲压工位上进行物料冲压、搬运、上下料等工作。现有的搬运及码垛机械手常包括升降机构和伸缩臂,该升降机构带动伸缩臂进行升降,该伸缩臂在水平方向进行伸缩,但上述设备在升降过程中容易产生晃动,从而影响了搬运及码垛机械手取放产品的精确性。
实用新型内容
为了克服现有技术的不足,本实用新型的目的在于提供一种搬运及码垛机械手,该搬运及码垛机械手在升降过程中不容易产生晃动,提高了搬运及码垛机械手取放产品的精确性。
为解决上述问题,本实用新型所采用的技术方案如下:
一种搬运及码垛机械手,包括底座,所述底座上设有升降机构,所述升降机构上安装有可升降的伸缩臂固定座,所述伸缩臂固定座上安装有在水平方向伸缩的伸缩臂,所述伸缩臂的端部设有吸盘,所述底座上设有两条沿竖直方向设置的导轨,所述伸缩臂固定座设有两条沿竖直方向设置的导轨槽,该伸缩臂固定座通过导轨槽与导轨联接。
优选的,所述底座顶部安装有内部为空腔的立柱,该立柱具有沿竖直方向设置的开槽,两条导轨分别设于开槽竖直方向的两侧;所述伸缩臂固定座置于立柱的空腔外,该伸缩臂固定座穿过开槽与置于立柱空腔内的升降机构联接。
优选的,所述升降机构包括丝杆、丝杆减速机、丝杆马达和可在丝杆上进行升降的升降件;所述丝杆竖直设置在立柱的空腔内,该丝杆的一端与丝杆减速机的输出端联接,该丝杆减速机的输入端与丝杆马达的输出端联接,该升降件与伸缩臂固定座联接。
优选的,所述伸缩臂固定座包括安装板和承托架,所述安装板中部开设主轴孔,所述导轨槽设于安装板的背面,每个导轨槽至少由两个置于同一直线上的滑块组成;所述承托架设于安装板的背面,承托架上设有副轴孔,该副轴孔与主轴孔相对布置;所述承托架一侧设有丝杆孔,所述丝杆穿过丝杆孔,升降件与丝杆孔联接,以此使得伸缩臂固定座可以在丝杆上进行升降。
优选的,所述丝杆马达和丝杆减速机设于立柱顶板的上方,所述丝杆的顶端穿过立柱的顶板联接有丝杆同步轮,该丝杆通过丝杆同步轮与丝杆减速机的输出端联接。
优选的,所述立柱与底座为可活动联接,所述底座设有立柱马达和立柱减速机,该立柱马达的输出端与立柱减速机的输入端联接,该立柱减速机的输出端与立柱的底部联接,以使立柱可在竖直方向绕中心轴旋转。
优选的,所述伸缩臂与伸缩臂固定座为可活动联接,所述伸缩臂固定座上安装有伸缩臂马达、伸缩臂减速机和伸缩臂同步轮,该伸缩臂马达的输出端与伸缩臂减速机的输入端联接,该伸缩臂减速机的输出端与伸缩臂同步轮联接,该伸缩臂同步轮通过转轴与伸缩臂在水平方向进行联接,以使伸缩臂可在水平方向绕中心轴旋转。
优选的,所述伸缩臂包括机械手臂、承托座和驱动机械手臂在水平方向移动的驱动模组;所述驱动模组包括驱动模组马达、驱动模组同步轮和驱动模组传动轴;所述驱动模组马达的输出端与驱动模组同步轮联接;所述驱动模组同步轮与驱动模组传动轴的一端联接;所述驱动模组传动轴水平设置在承托座上,该驱动模组传动轴安装有可进行水平移动的联动件,所述机械手臂水平设置在联动件上。
优选的,所述机械手臂包括机械手臂固定座,所述机械手臂固定座与联动件联接,该机械手臂固定座上设有吸盘传动马达和吸盘传动轴;所述吸盘传动轴一端与吸盘传动马达的输出端联接,另一端与吸盘联接。
优选的,所述吸盘传动轴上安装有轴承,该轴承设于承托座伸出机械手臂的端部。
相比现有技术,本实用新型的有益效果在于:
减少搬运及码垛机械手在升降过程中产生的晃动,以此提高搬运及码垛机械手取放产品的精确性。相对于现有技术仅用丝杆带动伸缩臂升降,本实用新型采用导轨、导轨槽配合加强伸缩臂升降的稳定性,具体为在所述底座上设有两条沿竖直方向设置的导轨,所述伸缩臂固定座设有两条沿竖直方向设置的导轨槽,该伸缩臂固定座通过导轨槽与导轨联接。
另外,由于伸缩臂的长度较长,在伸缩状态中不但容易晃动,所以本实用新型在吸盘传动轴上安装有轴承,该轴承设于承托座伸出机械手臂的端部,以此增加伸缩臂的固定点,从而提高了伸缩臂的稳定性,避免伸缩臂晃动。
另外,该机械手增加配重后,负载能力可达30KG,搬运半径增加至2米。
附图说明
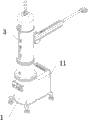
图1是本实用新型的结构示意图;
图2是本实用新型的侧面剖视示意图;
图3是本实用新型的正面剖视示意图;
图4是本实用新型的正面示意图;
图5是本实用新型的仰视示意图;
图6是本实用新型的图5的B部分放大示意图;
图7是本实用新型的伸缩臂固定座的结构示意图;
图8是本实用新型的图2的A部分放大示意图。
附图标记如下:
1、底座;11、配重箱;12、支撑脚;
2、伸缩臂固定座;21、安装板;22、主轴孔;23、承托架;24、副轴孔;25、丝杆孔;26、伸缩臂马达;27、伸缩臂减速机;28、伸缩臂同步轮;29、滑块;
3、立柱;31、开槽;32、导轨;33、立柱马达;34、立柱减速机;
41、丝杆;42、丝杆减速机;43、丝杆马达;44、丝杆同步轮;45、升降件;
51、顶罩;52、警报灯;
6、承托座;
71、驱动模组马达;72、驱动模组同步轮;73、驱动模组传动轴;74、联动件;
81、机械手臂固定座;82、吸盘传动马达;83、吸盘传动轴;84、吸盘;85、轴承。
具体实施方式
下面结合附图和具体实施方式对本实用新型作进一步详细说明。
如图1至8所示,本实用新型所述的搬运及码垛机械手包括底座1、升降机构、伸缩臂和伸缩臂固定座2。
如图1至5所示,所述底座1的外侧设有配重箱11,该配重箱11和底座1的底部均设有支撑脚12,设置配重箱11使得搬运及码垛机械手整体受力平衡,从而避免出现搬运及码垛机械手出现倾倒现象;所述底座1顶部安装有内部为空腔的立柱3,该立柱3具有沿竖直方向设置的开槽31,开槽31竖直方向的两侧各设有一条导轨32;所述立柱3与底座1为可活动联接,所述底座1顶部的空腔内设有立柱马达33和立柱减速机34,该立柱马达33的输出端与立柱减速机34的输入端联接,该立柱减速机34的输出端与立柱3的底部联接,以使立柱3可在竖直方向绕中心轴旋转。
所述升降机构包括丝杆41、丝杆减速机42、丝杆马达43、丝杆同步轮44和可在丝杆41上进行升降的升降件45;所述丝杆马达43、丝杆减速机42和丝杆同步轮44设于立柱3顶板的上方,所述丝杆41竖直设置在立柱3的空腔内;该丝杆41的顶端穿过立柱3的顶板与丝杆同步轮44联接,该丝杆同步轮44与丝杆减速机42的输出端联接,该丝杆减速机42的输入端与丝杆马达43的输出端联接;所述立柱3的顶板上安装有顶罩51,该顶罩51将丝杆马达43、丝杆减速机42和丝杆同步轮44包围在其内,且该顶罩51的顶部设有用于警报的警报灯52。
所述伸缩臂固定座2的延伸端穿过开槽31与升降件45联接,如图7所示,具体为所述伸缩臂固定座包括安装板21,安装板21中部开设主轴孔22,所述安装板21背面设有一个承托架23,承托架23上设有副轴孔24,该主轴孔22与副轴孔24在同一水平线上相对布置;所述承托架23一侧设有丝杆孔25,所述丝杆41穿过丝杆孔25,升降件45与丝杆孔25联接,以此使得伸缩臂固定座2可以在丝杆41上进行升降。所述伸缩臂固定座2上安装有伸缩臂马达26、伸缩臂减速机27和伸缩臂同步轮28,该伸缩臂马达26的输出端与伸缩臂减速机27的输入端联接,该伸缩臂减速机27的输出端与伸缩臂同步轮28联接,该伸缩臂同步轮28通过转轴与伸缩臂在水平方向进行联接,以使伸缩臂可在水平方向绕中心轴旋转。其中,所述伸缩臂固定座2设有两条沿竖直方向设置的导轨槽,该伸缩臂固定座2通过导轨槽与导轨32联接,而所述的每条导轨槽均由两个设于同一直线上的滑块29组成,该滑块29设于安装板21的背面。
所述伸缩臂包括机械手臂、承托座6和驱动机械手臂在水平方向移动的驱动模组;所述驱动模组包括驱动模组马达71、驱动模组同步轮72和驱动模组传动轴73;所述驱动模组马达71的输出端与驱动模组同步轮72联接;所述驱动模组同步轮72与驱动模组传动轴73的一端联接;所述驱动模组传动轴73水平设置在承托座6上,如图8所示,该驱动模组传动轴73安装有可进行水平移动的联动件74,所述机械手臂水平设置在联动件74上。所述机械手臂包括机械手臂固定座81,所述机械手臂固定座81与联动件74联接,该机械手臂固定座81上设有吸盘传动马达82和吸盘传动轴83;所述吸盘传动轴83一端与吸盘传动马达82的输出端联接,另一端与吸盘84联接。所述吸盘传动轴83上安装有轴承85,该轴承85设于承托座6伸出机械手臂的端部。
本实用新型包括以下几个工作状态:
一、伸缩臂横移;启动立柱马达33,使得立柱马达33能够通过立柱减速机34带动立柱3在竖直方向绕中心轴旋转,从而带动伸缩臂移动至取放料处。
二、伸缩臂升降;启动丝杆马达43,使得丝杆马达43通过丝杆减速机42、丝杆同步轮44带动丝杆41进行自转,该升降件45将丝杆41的转动变为自身的升降运动,而所述伸缩臂固定座2将跟随升降件45进行升降,从而实现了伸缩臂的升降。
三、伸缩臂旋转;启动伸缩臂马达26,使得伸缩臂马达26通过伸缩臂减速机27、伸缩臂同步轮28带动伸缩臂整体在水平方向绕中心轴旋转。
四、伸缩臂伸缩;启动驱动模组马达71,使得驱动模组马达71通过驱动模组同步轮72带动驱动模组传动轴73转动,该联动件74将驱动模组传动轴73的转动变为自身的水平移动,以此带动机械手臂进行伸缩。
五、吸盘旋转;启动吸盘传动马达82,使得吸盘传动马达82通过吸盘传动轴83带动吸盘84转动。
通过上述的五个工作状态,使得搬运及码垛机械手能够对产品进行取放、升降、移位、旋转等多个工序,实现了生产过程全自动的目的。
上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
Claims (10)
1.一种搬运及码垛机械手,包括底座,所述底座上设有升降机构,所述升降机构上安装有可升降的伸缩臂固定座,所述伸缩臂固定座上安装有在水平方向伸缩的伸缩臂,所述伸缩臂的端部设有吸盘,其特征在于:所述底座上设有两条沿竖直方向设置的导轨,所述伸缩臂固定座设有两条沿竖直方向设置的导轨槽,该伸缩臂固定座通过导轨槽与导轨联接。
2.根据权利要求1所述的搬运及码垛机械手,其特征在于:所述底座顶部安装有内部为空腔的立柱,该立柱具有沿竖直方向设置的开槽,两条导轨分别设于开槽竖直方向的两侧;所述伸缩臂固定座置于立柱的空腔外,该伸缩臂固定座穿过开槽与置于立柱空腔内的升降机构联接。
3.根据权利要求2所述的搬运及码垛机械手,其特征在于:所述升降机构包括丝杆、丝杆减速机、丝杆马达和可在丝杆上进行升降的升降件;所述丝杆竖直设置在立柱的空腔内,该丝杆的一端与丝杆减速机的输出端联接,该丝杆减速机的输入端与丝杆马达的输出端联接,该升降件与伸缩臂固定座联接。
4.根据权利要求3所述的搬运及码垛机械手,其特征在于:所述伸缩臂固定座包括安装板和承托架,所述安装板中部开设主轴孔,所述导轨槽设于安装板的背面,每个导轨槽至少由两个置于同一直线上的滑块组成;所述承托架设于安装板的背面,承托架上设有副轴孔,该副轴孔与主轴孔相对布置;所述承托架一侧设有丝杆孔,所述丝杆穿过丝杆孔,升降件与丝杆孔联接,以此使得伸缩臂固定座可以在丝杆上进行升降。
5.根据权利要求3所述的搬运及码垛机械手,其特征在于:所述丝杆马达和丝杆减速机设于立柱顶板的上方,所述丝杆的顶端穿过立柱的顶板联接有丝杆同步轮,该丝杆通过丝杆同步轮与丝杆减速机的输出端联接。
6.根据权利要求3所述的搬运及码垛机械手,其特征在于:所述立柱与底座为可活动联接,所述底座设有立柱马达和立柱减速机,该立柱马达的输出端与立柱减速机的输入端联接,该立柱减速机的输出端与立柱的底部联接,以使立柱可在竖直方向绕中心轴旋转。
7.根据权利要求3所述的搬运及码垛机械手,其特征在于:所述伸缩臂与伸缩臂固定座为可活动联接,所述伸缩臂固定座上安装有伸缩臂马达、伸缩臂减速机和伸缩臂同步轮,该伸缩臂马达的输出端与伸缩臂减速机的输入端联接,该伸缩臂减速机的输出端与伸缩臂同步轮联接,该伸缩臂同步轮通过转轴与伸缩臂在水平方向进行联接,以使伸缩臂可在水平方向绕中心轴旋转。
8.根据权利要求3所述的搬运及码垛机械手,其特征在于:所述伸缩臂包括机械手臂、承托座和驱动机械手臂在水平方向移动的驱动模组;所述驱动模组包括驱动模组马达、驱动模组同步轮和驱动模组传动轴;所述驱动模组马达的输出端与驱动模组同步轮联接;所述驱动模组同步轮与驱动模组传动轴的一端联接;所述驱动模组传动轴水平设置在承托座上,该驱动模组传动轴安装有可进行水平移动的联动件,所述机械手臂水平设置在联动件上。
9.根据权利要求8所述的搬运及码垛机械手,其特征在于:所述机械手臂包括机械手臂固定座,所述机械手臂固定座与联动件联接,该机械手臂固定座上设有吸盘传动马达和吸盘传动轴;所述吸盘传动轴一端与吸盘传动马达的输出端联接,另一端与吸盘联接。
10.根据权利要求9所述的搬运及码垛机械手,其特征在于:所述吸盘传动轴上安装有轴承,该轴承设于承托座伸出机械手臂的端部。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201420038476.XU CN203649200U (zh) | 2014-01-21 | 2014-01-21 | 一种搬运及码垛机械手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201420038476.XU CN203649200U (zh) | 2014-01-21 | 2014-01-21 | 一种搬运及码垛机械手 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203649200U true CN203649200U (zh) | 2014-06-18 |
Family
ID=50915637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201420038476.XU Expired - Fee Related CN203649200U (zh) | 2014-01-21 | 2014-01-21 | 一种搬运及码垛机械手 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203649200U (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103785766A (zh) * | 2014-01-21 | 2014-05-14 | 袁应超 | 一种搬运及码垛机械手 |
| CN109605341A (zh) * | 2018-11-28 | 2019-04-12 | 广东科捷龙机器人有限公司 | 应用于纸模自动化加工的机械手 |
-
2014
- 2014-01-21 CN CN201420038476.XU patent/CN203649200U/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103785766A (zh) * | 2014-01-21 | 2014-05-14 | 袁应超 | 一种搬运及码垛机械手 |
| CN109605341A (zh) * | 2018-11-28 | 2019-04-12 | 广东科捷龙机器人有限公司 | 应用于纸模自动化加工的机械手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103785766A (zh) | 一种搬运及码垛机械手 | |
| CN204689085U (zh) | 一种升降输送装置 | |
| CN203021253U (zh) | 机械式同步升降机构 | |
| CN201990253U (zh) | 浮动式产品下落定位装置 | |
| CN108942137A (zh) | 空格键自动组装系统 | |
| CN102950503A (zh) | 一种龙门式高精度自动装卸机械手 | |
| CN203958744U (zh) | 隔板自动投放机 | |
| CN204474187U (zh) | 一种壁式旋臂起重机 | |
| CN213320134U (zh) | 一种保温板材码垛机械臂 | |
| CN203649200U (zh) | 一种搬运及码垛机械手 | |
| CN204712045U (zh) | 一种移载机械手 | |
| CN103964190A (zh) | 一种自动升降的可堆叠料盘机构 | |
| CN204183573U (zh) | 机械手垂直运动机构 | |
| CN204295683U (zh) | 一种用于搬运的二自由度机械臂 | |
| CN208835968U (zh) | 一种带有高速搬运装置的双动子直线电机 | |
| CN203831028U (zh) | 一种核工业石墨拆除装置 | |
| CN209352499U (zh) | 一种玻璃吊架用托架 | |
| CN105710860A (zh) | 一种用于搬运的二自由度机械臂 | |
| CN207659020U (zh) | 一种变向传送装置 | |
| CN207359491U (zh) | 注塑自动上料机 | |
| CN103241556B (zh) | 塔旋式多臂全自动码坯机 | |
| CN204914402U (zh) | 注塑机自动上下料装置 | |
| CN112978184B (zh) | 一种托盘式自动出入库堆垛机设备 | |
| CN209600924U (zh) | 一种自动储箱开箱机 | |
| CN206218615U (zh) | 升降装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20140618 Termination date: 20160121 |
|
| EXPY | Termination of patent right or utility model |