CN1663239A - 移动检测装置及其利用该装置的噪声消除装置 - Google Patents
移动检测装置及其利用该装置的噪声消除装置 Download PDFInfo
- Publication number
- CN1663239A CN1663239A CN038149605A CN03814960A CN1663239A CN 1663239 A CN1663239 A CN 1663239A CN 038149605 A CN038149605 A CN 038149605A CN 03814960 A CN03814960 A CN 03814960A CN 1663239 A CN1663239 A CN 1663239A
- Authority
- CN
- China
- Prior art keywords
- output
- signal
- unit
- line memory
- memory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/144—Movement detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/14—Picture signal circuitry for video frequency region
- H04N5/21—Circuitry for suppressing or minimising disturbance, e.g. moiré or halo
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Picture Signal Circuits (AREA)
Abstract
提供这样的移动检测装置和使用了该装置的噪声消除装置:能加大噪声除去效果,同时,可以抑制伴随噪声除去效果的增大而产生的移动部分的拖尾的发生,并从弱电场到强电场可以加大噪声除去效果,同时,可以取消与其伴随发生的诸如余像和感到似乎是贴上的等表面上看起来的不自然状态。这个移动检测装置将帧差值与阈值进行比较,对于多个像素的块求得该结果的总和并与阈值比较输出所希望的信号,进而在水平或垂直方向将该输出扩大适用数个像素来执行移动检测。这个噪声消除装置使用该移动检测装置。
Description
技术领域
本发明,涉及电视接收机中的图像信号处理技术。
背景技术
作为从混入了噪声的图像输入信号除去噪声的方法,有帧循环型的噪声消除。例如,有这样的方法:求得将图像输出信号(被消除了噪声的)帧延迟过的信号与图像输入信号之差,将该差值乘以所希望的循环系数(0以上不足1),从原来的图像输入信号加、减该值,由此,来除去噪声。
除此而外,对于移动检测和噪声消除的传统技术,在特开2002-93834号公报和“晶体管技术专刊”(松井俊也、No.52、1999年、CQ出版株式会社、89-92页)等中也进行了记述。
下面,举例说明传统的技术。
图18A和图18B表示传统的帧循环型噪声消除装置的一个例子。在图18A中,帧存储器1801对图像输出信号(被消除了噪声的)1807进行帧延迟。减法器1802,求得帧存储器1801的输出和图像输入信号1806的帧差值。将这个差值输入到进行移动检测和循环系数生成的移动检测和循环系数生成电路1803。移动检测和循环系数生成电路1803,根据差值生成循环系数。
图18B示出了这个差值和循环系数的关系的一个例子。
在图18B中,横轴1810表示差值,纵轴1811表示循环系数,曲线1812表示出了差值和循环系数的关系。如曲线1812所示,移动检测和循环系数生成电路1803具有随着差值的增大使循环系数非线性地变小的特性。这是利用移动变大与差值变大之间的相关性来进行移动检测。将这样获得的循环系数和帧差值在乘法器1804中相乘。进而,加减运算器1805根据帧差值的符号由图像输入信号1806加、减乘法器1804的输出,由此,获得消除了噪声的图像输出信号1807。
在上述的传统方式中,通过加大循环系数来增大噪声消除的效果,但是,这种场合对于有移动的部分,会发生起由帧差值引起的衰减尾部的弊病。于是,有根据帧差值进行非线性处理,或进行移动检测后根据其结果改变循环系数的方法。但是,由于传统的运动检测或是照原样利用帧差值,或是利用水平和垂直的边缘检测,所以,对于与噪声电平同程度或其以下水平的移动部分,不能进行噪声和移动的区别。在这种状态下要除去噪声,就会发生衰减尾部的现象。因而,在这样的状态下,从防止衰减尾部的弊病的观点,会限止噪声消除效果。
另外,有或者根据帧差值进行非线性处理、或者进行移动检测后根据其结果改变循环系数的方法。这个方法,被记载于上述的非专利文献中。但是,传统的移动检测,是照原样地利用帧或半帧差值。这种场合,对于与噪声电平同程度或其以下的移动部分,不能进行噪声和移动的区别。在这种状态下,若要消除噪声,就会发生余像的现象。因而,在这样的状态下,从防止余像的弊病的观点,会限止噪声消除效果。
在上述的构成中,在帧差值中由移动引起的差值、在与由噪声引起的差值同程度或在其以下水平的场合,由于不能对两者进行区别,从防止衰减尾部的发生的目的来看,不能加大循环系数会限制噪声消除效果。
另外,为了对于噪声量容易变多的暗的部分适当地提高噪声消除效果,也可以考虑依据来自AGC的信息和输入信号电平来控制噪声消除水平的方法。但是,为与AGC电路联合动作需要附加新的控制电路,另外,在使用输入信号电平本身的方法中,由于噪声的影响在空间方向容易引起控制水平的变动。
再者,在依据移动检测结果适当地并用循环型噪声消除和使用了空间方向的滤波器的非循环型噪声消除的场合,当使用传统的不连续的移动检测结果时,伴随空间方向的不连续的处理,容易产生表面上看起来的不自然状态,而且对于包含轮廓的动画,由于加空间方向的滤波器,在动画时容易产生轮廓的模糊,所以需要附加轮廓修整电路。
另外,一般在图像中静止图像部分和动态图像部分是以一定的一致出现的。因而,在该领域中,很有可能由移动检测结果在相邻的像素间利用相同的循环系数,特别是在加大了循环系数的场合中、由此容易产生诸如感到似乎是贴上了图像等表面上看起来的不自然状态。另外,在弱电场时在移动检测中的阈值变大,循环系数一加大容易产生在整个图像上结了一层薄膜的不自然的感觉。
发明内容
移动检测装置,至少配备有:
对图像输入信号进行帧延迟的帧存储器;
求得图像输入信号和从帧存储器所读出的帧延迟信号之差的减法器;
将减法器的输出和任意的阈值进行比较的比较部;
对由比较部所输出的信号进行延迟的第1行存储器;
对第1行存储器的信号再次进行延迟的第2行存储器;
以图像信号的各像素为中心将在水平方向和垂直方向上相邻的多个像素作为一个块、对于来自比较部的输出和来自第1行存储器的输出和来自第2行存储器的输出、求得块内的各像素的总和,并对该和与任意的阈值进行比较的块判别部。
消除装置,至少配备有:
上述的移动检测装置;
对于减法器的输出乘以系数、与图像输入信号进行加减运算,由此,来去除噪声的噪声消除处理部;
将来自噪声消除处理部的输出只延迟比较部和奇异点去除部的行延迟量的第3行存储器;
将图像输入信号只延迟比较部和奇异点去除部的行延迟量的第4行存储器;
根据移动检测结果选择第3行存储器的输出和第4行存储器的输出后、输出图像输出信号的选择器。
将由选择器所选择的图像输出信号输入到帧存储器。
附图说明
图1,表示本发明实施方式1中的使用了块判别的移动检测装置。
图2,表示本发明实施方式2中的噪声消除装置。
图3,表示本发明实施方式3中的噪声消除装置。
图4A~图4C,是依据块判别的移动检测的说明图。
图5,表示本发明实施方式5中的移动检测装置。
图6A~图6E,是本发明实施方式4中的移动检测的说明图。
图7,表示本发明实施方式5中的移动检测装置。
图8,是本发明实施方式5中的奇异点除去的说明图。
图9,表示本发明实施方式6中的噪声消除装置。
图10,表示本发明实施方式7中的噪声消除装置。
图11A和图11B,是本发明实施方式7中的增益控制的说明图。
图12,表示本发明实施方式8中的噪声消除装置。
图13,是本发明实施方式8中的电平调整的说明图。
图14,表示本发明实施方式9中的噪声消除装置。
图15A和图15B,是本发明实施方式9中的增益控制的说明图。
图16,表示本发明实施方式10中的噪声消除装置。
图17,是本发明实施方式10中的混合系数的计算方法的说明图。
图18A和图18B,表示传统例子中的帧循环型噪声消除装置。
具体实施方式
本发明,提供:解决在传统的移动检测装置和噪声消除装置中的课题的移动检测装置及其利用该装置的噪声消除装置。
下面,就本发明的实施方式,参照附图进行说明。
(实施方式1)
首先,就其(实施方式1),说明其细节。
图1,是本发明(实施方式1)中的移动检测装置构成图。
帧存储器101,对图像输入信号108进行帧延迟,减法器102求得图像输入信号108和由帧存储器101读出的帧延迟信号的差。比较部103进行来自减法器102的输出和规定的阈值间的比较,根据其结果产生所希望的信号。第1行存储器(在图1中记为行存储器)104将比较部103所输出的信号延迟1行(1水平扫描间隔),第2行存储器(在图1中记为行存储器)105再将第1行存储器104的输出延迟1行。块判别部106,求得块内的各像素总和,对该总和与规定的阈值进行比较,根据其结果作为该块的中心像素的值输出所希望的信号。这个块,是以各像素为中心、由该像素和水平与垂直方向的近旁的一些像素构成的。构成块的像素,是由比较部103和第1行存储器104以及第2行存储器105得到的。奇异点除去部107,除去由在块判别部106等的一系列处理中所发生的奇异点后,作为移动检测结果输出。在奇异点除去部107除去奇异点的处理,是通过或者将块判别部106的结果在水平和垂直方向扩大适用数个像素,或者将其扩大适用到时间轴方向,或者在各像素中与在块判别部106中的处理前的信号进行比较,来执行。
下面,举个具体例子来说明其动作。
减法器102,在在帧存储器101将图像输入信号108延迟了1帧的信号和图像输入信号108之间求得帧差值,将该帧差值输入比较部103。比较部103对帧差值和规定的阈值的电平进行比较,根据其比较结果输出所希望的信号。比较部103,求得帧差值的绝对值,比较它与阈值间的大小关系,如果帧差值的绝对值比阈值小,则输出0信号;比阈值大,则输出1的1比特信号。
图4A,表示出了比较部103的特性例子。在图4A中,横轴411表示上述的帧差值;纵轴412表示帧差值的绝对值;直线413和414表示帧差值和帧差值的绝对值间的关系。另外,帧差值和帧差值的绝对值,以阈值415为界,被分割成区域416和区域417。比较部103,在区域416输出0,在区域417输出1。
这时,对于帧差值信号进行低通滤波处理也可以除去一些噪声。将这个1比特信号和由第1行存储器104将它延迟了1行的信号以及由第2行存储器105再将第1行存储器104的输出信号延迟了1行的信号输入到块判别部106。
用图4B和图4C来说明块判别部106的动作。
在图4B中,箭头421表示画面的水平方向,箭头422表示画面的垂直方向。以像素P6为中心作为1个块来处理3像素、5像素、3像素总计11像素。这时比较部103的输出是像素P9、像素P10、像素P11,第1行存储器104的输出是像素P4、像素P5、像素P6,像素P7、像素P8,第2行存储器105的输出是像素P1、像素P2、像素P3。
图4C,表示针对图4B的各像素的比较部103的输出。画斜线的像素表示0,未画斜线的像素表示1。在块判别部106中,对于这11个像素,求得从比较部103和行存储器104和行存储器105所输出的1比特信号(1或0)的总和,在该总和与规定的阈值间比较其大小关系。这时总和的最小值为0,最大值为11。块判别部106,如果它比阈值还小作为中心像素P6的值输出0,如果比阈值大作为中心像素P6的值输出1的1比特信号。此处,具有1值的像素被视之为有移动的像素。在图4C中总和为7,因为阈值是6,所以,块判别部106判断为P6是移动部分而输出1。这个处理,是利用了图像的移动部分在多个相邻像素是以某种程度的一致出现的、和噪声在相邻像素间散乱出现这样的随机性。块判别部106在各像素中进行依据这样的块的判别,将其判别结果输入到奇异点除去部107。
在此,我们举一个在水平或垂直方向将块判别部106的结果扩大适用数个像素,或者在时间轴的方向将其扩大适用的场合的例子。例如,所谓在水平方向扩大适用1个像素,就是在图4B中如果像素P6是1(移动),将像素P5、像素P7也作为1、来当作有移动的像素。这是由于在上述的块判别中移动的部分和非移动的部分的疆界中容易引起误判定(将本来是1的部分判定为0),所以,要扩大动画部分来修正这个误判定。这样一来将对误检测进行修正过的信号作为移动检测的结果输出信号输出。通过利用依据这样的块的判别可以抑制输入信号中所包含的噪声的影响而只检测图像的移动部分。
(实施方式2)
其次,就其本发明的(实施方式2),说明其细节。
图2,是本发明(实施方式2)中的噪声消除装置的构成图。图2的帧存储器201、减法器202、比较部203、第1行存储器(在图2中记为行存储器)204、第2行存储器(在图2中记为行存储器)205、块判别部206、奇异点除去部207,和图1的帧存储器101、比较部103、第1行存储器104、第2行存储器105、块判别部106、奇异点除去部107,分别具有同等的功能。因而,对于这些部分省略详细说明。但,帧存储器201对这个噪声消除装置的图像输出信号进行帧延迟。
噪声消除处理部208对于减法器202的输出乘以规定的系数,与图像输入信号212进行加、减运算,由此,来消除噪声。第3行存储器(在图2中记为行存储器)209,将来自噪声消除处理部208的输出只延迟比较部203和奇异点除去部207间的行延迟量。第4行存储器(在图2中记为行存储器)210,将图像输入信号212只延迟比较部203和奇异点除去部207间的行延迟量。选择器211,根据来自奇异点除去部207的移动检测结果、选择由第3行存储器209所延迟过的来自噪声除去处理部208的输出和由第4行存储器210所延迟过的图像输入信号212。而后,选择器211将选择的信号作为图像输出信号213输出。
下面,举个具体例子来说明其动作。
减法器202,求得由帧存储器201帧延迟过的图像输出信号213和图像输入信号212间的帧差值。用该帧差值用与上述的(实施方式1)同样的方法进行移动检测,由奇异点除去部207作为移动检测结果信号、对于各像素、若为移动部分则输出1,否则则输出0。另一方面,噪声消除处理部208对于减法器202的输出结果(帧差值)乘以对应该差值量的规定系数(大于0小于1),根据该差值量的符号从图像输入信号212加减该结果,由此,来进行噪声除去。第3行存储器209,将来自噪声消除处理部208的输出只延迟比较部203和奇异点除去部207间的行延迟量。另外,第4行存储器210,将图像输入信号212只延迟比较部203和奇异点除去部207间的行延迟量。即这种场合,如图4B所示,进行3行的块判别且其中心像素相当于1行延迟信号,所以,在第3行存储器209和第4行存储器210中执行1行延迟。选择器211,根据来自奇异点除去部207的移动检测结果、选择由第3行存储器209所延迟过的来自噪声消除处理部208的输出和由第4行存储器210所延迟过的图像输入信号212。具体地说,如果移动检测结果为1(移动),选择由第4行存储器210所延迟过的图像输入信号;如果为0选择由第3行存储器209所延迟过的来自噪声消除处理部208的信号,作为图像输出信号213输出。在这个噪声消除装置中,由于是依靠图1所示的移动检测装置来完成抑制噪声影响的移动检测,所以,在噪声消除处理部208中,可以得到比传统更大的噪声除去效果,同时还可以抑制由移动部分所引起的余像的弊病。
(实施方式3)
下面,就其本发明的(实施方式3),说明其细节。
图3,是(实施方式3)中的噪声消除装置的构成例子。图3的帧存储器301、减法器302、比较部303、第1行存储器(在图3中记为行存储器)304、第2行存储器(在图3中记为行存储器)305、块判别部306、奇异点除去部307、噪声消除处理部308、第3行存储器(在图3中记为行存储器)309、第4行存储器(在图3中记为行存储器)310、选择器311,和图2的帧存储器201、减法器202、比较部203、第1行存储器204、第2行存储器205、块判别部206、奇异点除去部207、噪声消除处理部208、第3行存储器209、第4行存储器210、选择器211,分别具有同等的功能。因而,对于这些部分省略详细说明。滤波器312(在图3中记为LPE)对于混入噪声的图像输入信号313依靠低通滤波处理来减轻噪声成分。在图2记载的噪声消除装置中,有时会发生由于照原样输出作为移动部分所检测的且含有大量噪声的图像输入信号212的部分和由噪声消除处理部208除去噪声的部分间的噪声量的差、造成的表面上看起来的不自然状态。对此,通过采用图3的结构,可以减轻由上述的噪声量的差造成的表面上看起来的不自然状态。
再者,在噪声量不是那么多的场合,为了避免由滤波处理所造成的画质下降,也可以控制使其不进行这个滤波处理。
(实施方式4)
下面,就其本发明的(实施方式4),说明其细节。
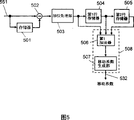
图5,是(实施方式4)中的移动检测装置的构成图。图5的图像输入信号551、减法器502、第1行存储器(在图5中记为行存储器)504、第2行存储器(在图5中记为行存储器)505、块判别部508,是和图1的图像输入信号108、减法器102、第1行存储器104、第2行存储器105、块判别部106一样的。因而,对于这些部分省略详细说明。
存储器501对应图1的帧存储器101。加权处理部503对应图1的比较器103。加权处理部503比图1的比较器103有更多的阈值,输出模式的数目也多。即,加权处理部503,根据减法器502的输出由规定的阈值对其进行多级别地加权。第1加法器(在图5中记为加法器)506和移动系数生成部507构成块判别部508。
第1加法器506以图像信号的各像素为中心将在水平和垂直方向相邻的多个像素作为1个块来处理,对于加权处理部503的输出和第1行存储器504的输出和第2行存储器505的输出求得块内的各像素的总和。移动系数生成部507根据第1加法器506的加法运算结果用非线性连续函数生成针对块的中心像素的移动动系数532,并输出该移动系数532。
下面,举个具体例子来说明其动作。
加权处理部503,根据减法器502的输出由规定的阈值对其进行多级别地加权。在此,举出进行4个级别地加权的例子进行说明。
图6A,表示进行4个级别地加权的加权处理部503的输入输出关系。在图6A中,横轴611表示上述的帧差值;纵轴612表示帧差值的绝对值;直线613和614表示帧差值和帧差值的绝对值间的关系。另外,帧差值和帧差值的绝对值,以阈值615、616、617为界,被分割成区域618和区域619和区域620和区域621。加权处理部503求得帧差值的绝对值,根据其大小用3个阈值(th1、th2、th3)对它进行从0到3的4个级别地加权。若过该绝对值小于th1相当区域618所以输出0,如果是大于th1而小于th2相当区域619所以输出1,如果是大于th2而小于th3相当区域620所以输出2,如果是大于th3相当区域621所以输出3。这样,加权处理部503输出表示从0到3中之一的2比特信号。这时,对于帧差值信号进行低通滤波处理等也可以除去一些噪声。
将这个2bit信号、和由第1行存储器504将该信号延迟1行的信号、和由第2行存储器505将第1行存储器504的输出再延迟1行的信号,输入到第1加法器506。第1加法器506,例如如图6B所示将以像素P6的像素为中心的总计11个像素作为1个块来进行加法运算处理。加权处理部503的输出是像素P9、像素P10、像素P11,第1行存储器504的输出是像素P4、像素P5、像素P6、像素P7、像素P8,第2行存储器505的输出是像素P1、像素P2、像素P3。箭头631和箭头632,分别和图4B的箭头421和箭头422是一样的。第1加法器506对这些从像素P1到像素P11的11个像素被加权过的2比特的值进行加法运算处理作为中心像素P6的值输出。即加法运算结果的最小值是0,最大值是33,这个值越大这个区域是移动部分的可能性越大。移动系数生成部507根据该加法运算结果用非线性连续函数生成针对中心像素P6的移动系数532并输出
图6C,表示移动系数生成部507的特性例子。在图6C中,横轴651表示第1加法器506的加法运算结果;纵轴652表示由移动系数生成部507所输出的移动系数;线653表示所输入的加法运算结果和所输出的移动系数间的关系。如图6C所示,加法运算结果越小移动系数越接近于1;而加法运算结果越大移动系数越接近于0。即作为移动系数计算出近似静画接近于1、近似加法运算结果大的动画接近于0的值。在实际进行数字处理的场合,例如输出从32到0的整数值,在处理的最后要用32除。这时对于加法运算结果接近0的部分(加法运算结果在a以下),是由噪声引起的值的可能性大,所以,是静画即移动系数作为1。另外,当加法运算结果变大时(加法运算结果比b大的部分),是动画的可能性大,所以,是动画即移动系数作为0。对于其余部分由高阶函数来计算非线性的移动系数。这时,加法运算结果,做成使其在a和b的位置分别为1和0。
用图6D和图6E来说明这个例子。在图6D中,横轴661表示加法运算结果;纵轴662表示运算结果;线663表示所输入的加法运算结果和运算结果间的关系。另外,在图6E中,横轴671表示加法运算结果;纵轴672表示移动系数;线673表示所输入的加法运算结果和所输出的移动系数间的关系。首先,从加法运算结果减去a(1以上的整数),结果为大于(-a)小于(33-a)。其次从32减去这个结果,变为大于(a-1)小于(32+a),若用32将其限幅,就变成为线663那样。若令这个运算结果为x、a为3对x求取(x4)/(323)的4次函数,则得到图6E所示的移动系数。
此处是将移动系数扩大了32倍(在乘这个移动系数的场合在乘过之后要用32除)。若考虑数字处理,实际上小数点以下是被舍掉的,所以,加法运算结果在22以上移动系数就变为0。由此,只用在加权处理中使用的阈值就可以求取更多的移动系数,所以可以进行使用了更连续的移动系数的处理。在由阈值判别移动系数的方法中,会产生这样的问题:为了获得连续的系数就需要更多的阈值所以控制变得复杂。本实施方式,是进行加权处理并以规定的块单位进行该加权值的相加、而后由非线性函数来求取移动系数的方法。在这个方法中,通过加权处理可以用较小规模的电路来获得非线性特性的连续的移动系数。当然,不进行加权处理照原样以块单位对帧差值进行加法运算,从该结果也可以求得具有非线性特性的移动系数(相当于增加了加权的阈值)。另外以块单位进行加法运算处理的目的,是利用了:图像的移动部分在多个相邻的像素是以一定程度的一致出现的、以及噪声在相邻像素间具有分散出现的随机性的事实。由此,可以区别噪声和移动来抑制包含在输入信号中的噪声的影响而只检测图像的移动部分。
(实施方式5)
下面,就其本发明的(实施方式5),说明其细节。
图7,是(实施方式5)中的移动检测装置的构成图。在图7中,图像输入信号732、存储器701、减法器702、加权处理部703、第1行存储器(在图7中记为行存储器)704、第2行存储器(在图7中记为行存储器)705、块判别部731、第1加法器(在图7中记为加法器)706、移动系数生成部707、移动系数733分别是和图5的图像输入信号551、存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、块判别部508、第1加法器506、移动系数生成部507、移动系数532是同样的。因而,对于这些部分省略详细说明。
第2加法器(在图7中记为加法器)708对于来自加权处理部703的输出、求得处于作为处理单位的上述的块内的同一行的像素之和。第3加法器(在图7中记为加法器)709对于来自第2行存储器705的输出、求得处于块内的同一行的像素的和。奇异点除去部710根据第2加法器708的相加结果和第3加法器709的相加即如果,修正由移动系数生成部707所输出的移动系数。即,奇异点除去部710,或对于由移动系数生成部707所输出的移动系数在垂直方向扩大移动部分,或对于来自移动系数生成部707的移动系数在水平方向扩大移动部分,由此,来除去在以块单位的处理中容易发生的奇异点。
下面,举个具体例子来说明其动作。
用与(实施方式4)同样的方法由移动系数生成部707输出针对图像输入信号732的移动系数。第2加法器708,相加对于图6B的像素P9、像素P10、像素P11等3个像素的由加权处理部703加权过的2比特的值。另外,第3加法器709,相加由第2行存储器705所输出的对于图6B的像素P1、像素P2、像素P3等3个像素的被加权过的2比特的值。将各自的相加结果输入到奇异点除去部710。
奇异点除去部710,根据其相加的结果修正来自移动系数生成部707的移动系数或者在垂直方向扩大移动部分,或者对于来自移动系数生成部707的移动系数在水平方向扩大移动部分,来除去在以块单位的处理中容易发生的奇异点。
其次,示出了在奇异点除去部710中的处理的一个例子。首先,针对各像素对于由移动系数生成部707所输出的在(实施方式4)所示出的图6E那样的移动系数,将左右1像素到2像素的最小值作为该中心像素的移动系数,由此,可以在水平方向扩大移动部分。另外在垂直方向的移动部分的扩大中,如图8所示,由第2加法器708或第3加法器709加法运算结果(最小值为0,最大值为9)修正处理块单位的中心像素P6的移动系数。图8的箭头801、箭头802、从像素P1到像素P11,对应于图6的箭头601、箭头602、从像素P1到像素P11。奇异点去除部710,譬如加法运输结果如果是7以上,做成使像素P6的移动系数为0修正来自移动系数生成部707的移动系数扩大移动部分。通过这样的处理,可以除去在以块单位的处理中容易发生的奇异点。
(实施方式6)
下面,就其本发明的(实施方式6),说明其细节。
图9,是(实施方式6)中的噪声消除装置的构成例子。在图9中的图像输入信号951、存储器901、减法器902、加权处理部903、第1行存储器(在图9中记为行存储器)904、第2行存储器(在图9中记为行存储器)905、块判别部931、第1加法器(在图9中记为加法器)906、移动系数生成部907的各方框与图5的图像输入信号551、存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、块判别部508、第1加法器506、移动系数生成部507的各方框具有同样的功能。另外,第2加法器(在图9中记为加法器)908、第3加法器(在图9中记为加法器)909、奇异点去除部910的各方框与图7的第2加法器708、第3加法器709、奇异点去除部710的各方框具有同样的功能。因而,对于这些部分省略详细说明。
第5行存储器(在图9中记为行存储器)911将图像输入信号951延迟1行。第6行存储器(在图5中记为行存储器)912,将由存储器901读出的信号延迟1行。第2减法器913求得来自第5行存储器911的信号和来自第6行存储器912的信号的差值。第1乘法器914将第2减法器913的输出乘上规定的增益(大于0小于1)。第2乘法器915将第1乘法器914的结果乘上由移动系数生成部907和奇异点除去部910所决定的移动系数。加减法器916,根据第2减法器913中的减法运算结果的正负符号,将第2乘法器915的输出与第5行存储器911的信号进行加减运算。存储器901输出将来自加减法器916的图像输出信号952延迟了(1帧-1行)的信号。这是采用了在(实施方式4)或(实施方式5)所示的移动检测装置的循环型噪声消除装置。
下面,举个具体例子来说明其动作。
减法器902,求得在存储器901中将图像输出信号952(被除去了噪声的信号)延迟了(1帧-1行)的信号和图像输入信号951的差值。在存储器901中的延迟量比1帧还少1行的理由,是由于在(实施方式4)或(实施方式5)所示的移动检测装置中移动系数的输出对于图像输入信号951落后1行。对于这个差值,依据在(实施方式4)或(实施方式5)说明过的方法,经过移动系数生成部907和奇异点除去部910来决定移动系数。另一方面,第2减法器913,求得在第5行存储器911中将图像输入信号951延迟了1行的信号、和在第6行存储器912中将来自存储器911的信号延迟了1行的信号间的差值。第1乘法器914对于该差值乘上任意的增益(大于0小于1)917。该增益917是和移动系数独立地乘的系数、是决定循环量的要素之一。若加大增益917,噪声除去效果则变大。当假定是数字处理的场合,第1乘法器914实际上例如是扩大了32倍装置,即在将差值乘以大于0小于32的整数值后要将其结果除以32。第2乘法器915对于该第1乘法器914的结果乘上由移动系数生成部907和奇异点除去部910所决定的移动系数。作为这个移动系数例如乘以在(实施方式4)所示的图6E那样的系数。即第2乘法器915根据移动乘以从0到32的整数值,而后用32除。由此,根据该像素的移动量来调整由第1乘法器914所乘的所有像素一样的增益(循环量)。对于第5行存储器911的信号、根据第2减法器913中的减法运算结果的正负符号、在加减法器916中加减运算第2乘法器915的结果,由此,可以除去噪声。
这个噪声消除装置采用了(实施方式4)或(实施方式5)中所记载的移动检测装置。通过采用这些移动检测装置,可以完成从强电场到弱电场抑制噪声影响的移动检测,同时,在相邻像素间根据图像的移动量可以获得更连续的移动系数。因此,本实施方式中的噪声消除装置,可以加大噪声除去效果,同时,还可以减轻伴随余像和使用了不连续的系数的处理而产生的图像的表面上看起来的不自然状态。
(实施方式7)
下面,就其本发明的(实施方式7),说明其细节。
图10,是(实施方式7)中的噪声消除装置的构成例子。在图10中的图像输入信号1051、存储器1001、减法器1002、加权处理部1003、第1行存储器(在图10中记为行存储器)1004、第2行存储器(在图10中记为行存储器)1005、块判别部1031、第1加法器(在图10中记为加法器)1006、移动系数生成部1007的各方框,与图5的图像输入信号551、存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、块判别部508、第1加法器506、移动系数生成部507的各方框具有同样的功能。另外,第2加法器(在图10中记为加法器)1008、第3加法器(在图10中记为加法器)1009、奇异点去除部1010的各方框与图7的第2加法器708、第3加法器709、奇异点去除部710的各方框具有同样的功能。另外,第5行存储器(在图10中记为行存储器)1011、第6行存储器(在图10中记为行存储器)1012、第2减法器1013、第1乘法器1014、第2乘法器1015、加减法器1016各方框,与图9的第5行存储器911、第6行存储器912、第2减法器913、第1乘法器914、第2乘法器915、加减法器916的各方框具有同样的功能。因而,对于这些部分省略详细说明。
第1选择器1017,由控制信号1043控制,选择第1增益1041和第2增益1042其中之一。第1选择器1017,依据在水平和垂直方向以及帧或半帧方向在每个像素所决定的控制信号1043来切换多个增益。
下面,举个具体例子来说明其动作。
在依据(实施方式6)所示的方法除去噪声的噪声消除装置中,对于图像输入信号951在第1乘法器914对于在第2减法器913的差值结果乘以增益。在本实施方式中的噪声消除装置中,是用多个增益并在水平和垂直方向以及帧或半帧方向在每个像素来切换它们。
图11A和图11B示出了上述的切换的例子。两图表示出了在帧内或半帧内的各像素中的增益。G1表示第1增益1041、G2表示第2增益1042。画面1101和画面1102是相邻的帧或半帧。在画面1101和画面1102中,在水平方向和垂直方向G1和G2是交互地切换的。并且,对于画面内的同一位置的像素,在画面1101和画面1102之间G1和G2也是交互地切换的。
如上所述,发生在水平和垂直方向以及帧或半帧方向在互邻的像素之间切换两个增益的控制信号1403,并被输入到选择器1017。第1选择器1017,依据这个控制信号1043切换两个增益。这种场合,对于一个增益、将另一个增益设计的比它小,由此,来有意地附加微小的噪声,可以减轻伴随增益变大而产生的诸如余像和感到空间方向上的图像似乎是贴上的等表面上看起来的不自然状态。再者,通过切换增益,比用一个增益进行处理的场合由于还可以将另一个增益设定的更大,所以可以获得更大的噪声除去效果。因而,在强电场时如果要设定成使其没有贴上去的感觉,也可以将另一个增益设置为1。在噪声去除的过程中一般具有相同循环系数的像素容易聚集(特别是对于接近静止画面的区域),所以,容易引起感到图像似乎是贴上的等表面上看起来的不自然状态。但是,通过这样地以像素单位控制增益,可以抑制这个现象。这个方法当然在其他的在噪声去除装置中也可以适用。
(实施方式8)
下面,就其本发明的(实施方式8),说明其细节。
图12,是(实施方式8)中的噪声消除装置的构成例子。在图12中的图像输入信号1251、存储器1201、减法器1202、加权处理部1203、第1行存储器(在图12中记为行存储器)1204、第2行存储器(在图12中记为行存储器)1205、块判别部1231、第1加法器(在图12中记为加法器)1206、移动系数生成部1207的各方框,与图5的图像输入信号551、存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、块判别部508、第1加法器506、移动系数生成部507的各方框具有同样的功能。另外,第2加法器(在图12中记为加法器)1208、第3加法器(在图12中记为加法器)1209、奇异点去除部1210的各方框,与图7的第2加法器708、第3加法器709、奇异点去除部710的各方框具有同样的功能。另外,第5行存储器(在图12中记为行存储器)1211、第6行存储器(在图12中记为行存储器)1212、第2减法器1213、第1乘法器1214、第2乘法器1215、加减法器1216各方框,与图9的第5行存储器911、第6行存储器912、第2减法器913、第1乘法器914、第2乘法器915、加减法器916各方框具有同样的功能。另外,第1选择器1217,与图10的第1选择器1017具有同样的功能。第1增益1241、第2增益1242、控制信号1243,相当于图10的第1增益1041、第2增益1042、控制信号1043。因而,对于这些部分省略详细说明。
电平调整部1218,若从第2减法器1213所输出的信号的绝对值电平为规定的电平以下,将其连续地调整到比原来的绝对值小的值。将其调整后的值输入到第1乘法器1214。
下面,举个具体例子来说明其动作。
在(实施方式6)和(实施方式7)所示的噪声消除装置中,对于图像输入信号1251在第1乘法器1214对在第2减法器1213中的差值结果乘以增益。在本实施方式中,如果该差值的绝对值为规定值以下,电平调整部1218进行将其差值的绝对值连续地调整到比原来的绝对值小的值。
图13示出了电平调整部1218的输入输出特性的一个例子。在图13中,横轴1301表示被输入到电平调整部1218的差值;纵轴1302表示由电平调整部1218输出的值;折线1303表示电平调整部1218的输入输出关系。令被输入到电平调整部1218的差值为D,阈值为th。电平调整部1218,若所输入的差值D为th/2以下则输出D/2,若大于th/2小于th则输出3D/2-th/2,大于th则输出D。依据这个输入输出特性,在阈值th以下的差值中噪声除去效果变小。这是有意地一定程度地限制低电平的噪声除去量。然而,在弱电场时的噪声除去处理中容易产生感到整个画面似乎是结了一层薄膜等表面上看起来的不自然状态。做成本实施方式那样一定程度地残留低电平的噪声,由此,就可以减轻表面上看起来的不自然状态。根据电场的强弱等级控制阈值,可以在强电场做成使其电平调整无效,而随着变为弱电场做成使其限制低电平的噪声除去量。由于在弱电场时加大加权处理部1203的阈值,所以,伴随噪声除去处理整个图像似乎贴了一层膜的感觉有增加的倾向。但是,通过进行这样的电平调整既可以抑制表面上看起来的不自然状态,又可以重点地除去更容易引人注目的电平大的噪声。代替调整差值可以考虑几个减小阈值以下的增益等这种电平调整方法,但在抑制低差值电平的噪声除去效果这点上是同样的。
(实施方式9)
下面,就其本发明的(实施方式9),说明其细节。
图14,是(实施方式9)中的噪声消除装置的构成例子。图14的存储器1401、减法器1402、加权处理部1403、第1行存储器(在图14中记为行存储器)1404、第2行存储器(在图14中记为行存储器)1405、第1加法器(在图14中记为加法器)1406、移动系数生成部1407、块判别部1431的各方框,与图5的存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、第1加法器506、移动系数生成部507、块判别部508的各方框具有同样的功能。另外,第2加法器(在图14中记为加法器)1408、第3加法器(在图14中记为加法器)1409、奇异点去除部1410的各方框,与图7的第2加法器708、第3加法器709、奇异点去除部710的各方框具有同样的功能。另外,第5行存储器(在图14中记为行存储器)1411、第6行存储器(在图14中记为行存储器)1412、第2减法器1413、第1乘法器1414、第2乘法器1415、加减法器1416各方框,与图9的第5行存储器911、第6行存储器912、第2减法器913、第1乘法器914、第2乘法器915、加减法器916的各方框具有同等的功能。另外,第1选择器1417,与图10的第1选择器1017具有同样的功能。另外,电平调整部1418与图12的电平调整部1218具有同等的功能。另外,第1增益1441、第2增益1442、控制信号1443,对应于图10的第1增益1041、第2增益1042、控制信号1043。因而,对于这些部分省略详细说明。
平均值电路1419,对于图像输入信号1451和第5行存储器1411的信号求得在(实施方式4)所示的对应处理块内的像素的总和,计算其平均信号电平。增益调整部1420根据由平均值电路1419所计算出的平均值调整在第1乘法器1414中乘的增益。
下面,举个具体例子来说明其动作。
在依据(实施方式8)所示的方法除去噪声的噪声消除装置中,第1乘法器1414,对于电平调整部1418的输出乘以由第1选择器1417所输出的增益。在本实施方式中,根据处理对象的像素和其周围图像的平均信号电平来控制这个增益。
图15A和图15B表示该控制的一个例子。如图15A所示,平均值电路1419计算在图像输入信号1451的数据1502和来自第5行存储器1411的数据1501中、在(实施方式4)所示的对应处理块内的像素、即相当于图6B中的从像素P4到像素P11的8个像素的平均信号电平。而后,增益调整部1420,根据这个平均信号电平来调整增益。增益调整部1420,对于该信号电平大的即亮的部分相对地减小增益,对于灰度电平小即暗的部分将增益设大。
图15B,示出了增益调整部1420的特性的一个例子。在图15B中,横轴1524表示来自平均值电路1419的平均信号电平;纵轴1521表示在增益调整部1420的增益调整量;折线1523表示出了该平均信号电平与该增益调整量的关系的一个例子。在此,增益调整部1420对于来自第1选择器1417的增益例如如图15B所示按折线进行调整,在某个平均信号电平th以上将增益设定为90%左右。即起初的增益设定是以平均信号电平小的场合为基准来设定。通过由平均信号电平这样调整增益,即使在同一帧内和同一半帧内对于噪声量容易变多的信号电平小的区域、在每个像素中也可以提高噪声除去效果。另外,也没有必要进行与AGC电路的连动。再者,在此是从电路和计算量的角度将这样的畸变的8个像素作为一个块来求取平均信号电平,但可以任意地决定这个块。关键是在于求得多个像素的平均信号电平后,由此来调整增益。在使用输入信号电平本身的方法中、由于噪声的影响在空间方向容易引起控制电平的变动。本实施方式,为了减轻这个变动由依据周围的像素进行平均化后的值来控制。
(实施方式10)
下面,就其本发明的(实施方式10),说明其细节。
图16,是(实施方式10)中的噪声消除装置的构成例子。图16的存储器1601、减法器1602、加权处理部1603、第1行存储器(在图16中记为行存储器)1604、第2行存储器(在图16中记为行存储器)1605、第1加法器(在图16中记为加法器)1606、移动系数生成部1607、块判别部1631的各方框,与图5中的存储器501、减法器502、加权处理部503、第1行存储器504、第2行存储器505、第1加法器506、移动系数生成部507、块判别部508的各方框具有同样的功能。另外,第2加法器(在图16中记为加法器)1608、第3加法器(在图16中记为加法器)1609、奇异点去除部1610的各方框,与图7的第2加法器708、第3加法器709、奇异点去除部710的各方框具有同样的功能。另外,第5行存储器(在图16中记为行存储器)1611、第6行存储器(在图16中记为行存储器)1612、第2减法器1613、第1乘法器1614、第2乘法器1615、加减法器1616的各方框,与图9的第5行存储器911、第6行存储器912、第2减法器913、第1乘法器914、第2乘法器915、加减法器916的各方框具有同样的功能。另外,第1选择器1617,与图10的第1选择器1017具有同样的功能。另外,电平调整部1618,与图12的电平调整部1218同等的功能。另外,平均值电路1619、增益调整部1620,与图14的平均值电路1419、增益调整部1420具有同等的功能。因而,对于这些部分省略详细说明。
滤波处理部1621,对于加减法器1616的输出进行空间方向的低通滤波处理。混合系数运算部1622,根据由移动系数生成部1607和奇异点除去部1610所得到的连续的移动系数的值,来决定滤波处理部1621的输出和加减法器1616的输出信号间的混合比。混合处理部1623根据在混合系数运算部1622所决定的混合系数来混合滤波处理部1621的输出和加减法器1616的输出信号。轮廓检测部1624从加减法器1616的输出信号抽出图像的轮廓部分。第2选择器1625,依据来自轮廓检测部1624的输出,来切换混合处理部1623的输出和加减法器1616的输出信号。
下面,举个具体例子来说明其动作。
本实施方式,对于图像输入信号1651,对于由在(实施方式6)和(实施方式7)和(实施方式8)以及(实施方式9)所示的方法除去噪声的噪声消除装置的输出信号,在滤波处理部1621进行空间方向的低通滤波处理。例如图16的滤波处理部1621不追加行存储器而利用只是水平方向的滤波器。通过混合该滤波处理部1621的输出信号和滤波处理部1621的输入信号,来调整空间滤波器的效果。这时,混合系数运算部1622,用由移动系数生成部1607和奇异点除去部1610所得到的移动系数的值,来决定混合系数。即,在(实施方式6)和(实施方式7)和(实施方式8)以及(实施方式9)所示的噪声消除装置中,由于兼顾到余像等的影响在难以除去噪声的动画部分有时会发生残留噪声。由此,有时会发生表面上看起来的不自然状态。本实施方式,要减轻这个不自然状态。为此,例如对于(实施方式4)所示的图6E那样的移动系数,设定图17所示的混合之比。
结合图17来说明这个混合比。图17的横轴1701、纵轴1702、曲线1703分别相当于图6E的横轴671、纵轴672、曲线673。因而,省略这些部分的详细说明。如图17所示,越接近动画即移动系数越小的像素,空间方向的滤波的混合比例则越大。设定某个阈值th1704,若移动系数1702为th以上(接近静止)的区域1709,则将滤波处理部1621的输出的混合比例设定为0(即在(实施方式9)以前所示的噪声消除装置的输出本身);如为3th/4以上th以下的区域1708,则将其比例设定为1/4;如为th/2以上3th/4以下的区域1707,则将其比例设定为1/2;如为th/4以上th/2以下的区域1706,则将其比例设定为3/4;如为th/4以下的区域1705,则将其比例设定为1(即滤波处理部1621的输出本身)。通过改变这个阈值th1704,可以控制空间方向的滤波的效果,所以,随着变为弱电场加大这个阈值即可。再者,也可以考虑用函数来计算这个混合系数(上述的混合比例)的几个计算方法。根据这样决定的混合系数,在混合处理部1623混合未被滤波处理的信号和已被滤波处理的信号,由此,根据移动量来调整空间方向的滤波处理的效果。再者,为了防止由于加空间方向的滤波所造成的图像的模糊,在轮廓检测部1624检测轮廓部分。例如,在只是水平方向加滤波的场合,求得水平差值,若这个差值在某个电平以上判断为是轮廓,对于其左右1、2个像素控制第2选择器1625使其不加空间方向的滤波。结果,输出未被滤波处理的信号。通过这样的处理,就可以减轻由伴随循环型的噪声除去处理而容易发生的残留噪声所造成的动画部分的表面看上去的不自然状态。同时,无需附加轮廓修正电路、就可以一定程度地抑制伴随空间方向的滤波处理而产生的轮廓部分的模糊。
如以上叙述过的,在本发明中,利用噪声的随机性,求得将图像输入信号帧延迟后的信号和图像输入信号间的帧差值,对于这个差值进行与规定阈值的比较。对于该结果所输出的信号,以各像素为中心求得在水平和垂直方向上相邻的数个像素的块的总和,将这个总和与规定的阈值进行比较,来作为块的中心像素的值输出所希望的信号。再者,将这个输出或在水平和垂直方向上扩大适用数个像素、或扩大适用到时间轴方向、或在各像素中与在块判别部的处理前的信号进行比较,来除去在以块单位的处理中容易发生的奇异点。这样一来,就可以抑制图像输入信号中所包含的噪声的影响而只检测图像的移动部分。再者,通过对帧差值乘以所希望的系数并与图像输入信号进行加减运算,根据这个移动检测结果在每个像素中选择除去了噪声的信号和图像输入信号来形成图像输出信号。这样一来,就可以加大噪声除去效果,同时,还可以抑制由图像的移动所引起的衰减尾部的弊病。
另外,本发明,对于混入了噪声的图像输入信号,除了检测帧差值大的移动部分外,还区别具有与噪声电平同等或在其以下的帧差值的图像的移动部分和噪声、来进行抑制了噪声影响的移动检测,进而构筑采用了该移动检测装置的噪声除去装置。这样一来,与传统的相比,在加大了噪声除去效果的同时,还可以抑制伴随噪声除去效果的增大而产生的移动部分的衰减尾部的发生。
另外,依据本发明,在噪声多的场合可以减轻由与除去噪声部分间的噪声量的差所引起的表面上看起来的不自然状态。
另外,本发明提供:利用噪声的随机性由空间方向的几个像素信息进行移动检测,不用查找表格等而用控制了电路规模的方法、根据图像的移动量在相邻像素间输出更连续的移动系数的移动检测装置。进而,构筑利用了该移动检测装置的噪声消除装置,由此,在提高噪声除去效果的同时,还可以抑制伴随余像和采用了不连续的系数的处理而产生的图像的表面上看起来的不自然状态。
再者,本发明,在对于周围噪声量容易变多的暗的部分,不用AGC电路等信息来抑制噪声的影响适当地提高噪声除去效果。另外,减轻了由伴随噪声除去而产生的残留噪声所引起的表面上看起来的不自然状态,使之同时兼有从弱电场到强电场对于动画和静画提高噪声除去效果和防止与其伴随发生的余像和表面上看起来的不自然状态。
若依据本发明,可以提供:对于被加权后的帧或半帧差值将相邻的多个像素作为一个处理单位进行加法运算处理,由此,不用阈值而依据非线性函数来输出连续的移动系数的移动检测装置。这样一来,由利用了噪声的随机性的噪声和移动的区别,抑制输入信号中所包含的噪声的影响并根据图像的移动可以提供连续的移动系数。进而,构筑利用了该移动检测装置的噪声消除装置,由此,在加大噪声除去效果的同时,还可以减轻伴随余像和采用了不连续的系数的处理而产生的图像的表面上看起来的不自然状态。再者,通过在每个像素中切换多个增益,可有意地附加微小的噪声,可以减轻伴随增益变大而产生的诸如余像和感到在空间方向的图像似乎是贴上的等表面上看起来的不自然状态。加之,可以实现由加大增益而带来的噪声除去效果的提高。另外,在弱电场时调整低电平的差值来有意地限制低差值电平的噪声除去效果,由此,减轻感到似乎是结了一层薄膜等表面上看起来的不自然状态,同时,可以重点地除去容易引人注目的大电平的噪声。另外,根据针对相邻的多个像素的平均信号电平来调整增益,由此,即使在同一画面内、对于噪声量容易变多的信号电平小的区域、在每个像素也可以提高噪声除去效果。再者,依据来自移动检测装置的移动系数和来自轮廓检测部的轮廓信息、适当并用空间方向的滤波器,由此,在不使移动部分的轮廓模糊的情况下、可以减轻由伴随循环型的噪声除去处理容易发生的残留噪声引起的动画部分的表面上看起来的不自然状态。
通过利用这样的循环型噪声消除装置,从弱电场到强电场、对于动画和静画、可以同时兼有提高噪声除去效果和减轻与其伴随发生的余像和感到似乎图像是贴上去的表面上看起来的不自然状态。
另外,本发明,即使在同一画面内对于噪声量容易变多的信号电平小的区域,在每个像素可以提高噪声除去效果。
另外,依据本发明,在不使移动部分的轮廓模糊的情况下、可以减轻由伴随循环型的噪声除去处理而容易发生的残留噪声引起的动画部分的表面上看起来的不自然状态。
通过利用这样的循环型噪声消除装置,因此,从弱电场到强电场对于动画和静画、可以同时兼有提高噪声除去效果和防止与其伴随发生的余像和表面上看起来的不自然状态。
本发明的移动检测装置和使用了该装置的噪声消除装置,可以加大噪声除去效果,同时,可以抑制伴随噪声除去效果的增大而产生的移动部分的衰减尾部的发生。进而,从弱电场到强电场可以加大噪声除去效果,同时,还可以取消与其伴随发生的诸如余像和感到似乎是贴上的等表面上看起来的不自然状态。
Claims (11)
1.一种移动检测装置,其特征为:
配备有:
对图像输入信号进行帧延迟的帧存储器,
和求得上述图像输入信号和从上述帧存储器所读出的帧延迟信号的差值的减法器,
和进行上述减法器的输出和任意的阈值的比较的比较部,
和对由上述比较部所输出的信号进行延迟的第1行存储器,
和对上述第1行存储器的信号再次进行延迟的第2行存储器,
和以图像信号的各像素为中心将在水平方向和垂直方向上相邻的多个像素作为一个块、对于来自上述比较部的输出和来自上述第1行存储器的输出和来自上述第2行存储器的输出、求得上述块内的各像素的总和、并对该和与任意的阈值进行比较的块判别部。
2.具有下述特征的权利要求项1中记载的移动检测装置:
还配备有:
将上述判别部的输出在水平或垂直方向扩大适用数个像素、
或扩大适用到时间轴方向、
或在各像素中与在上述块判别部的处理前的信号进行比较,
去除上述块判别部在块单位的处理中发生的奇异点后输出移动检测结果信号的奇异点除去部。
3.一种噪声消除装置,其特征为:
配备有:
权利要求项1或2中记载的移动检测装置,
和通过对于上述减法器的输出乘以系数、与上述图像输入信号进行加减运算,来除去噪声的噪声消除处理部,
和将来自上述噪声消除处理部的输出只延迟上述比较部和上述奇异点除去部的行延迟量的第3行存储器,
和将上述图像输入信号只延迟上述比较部和上述奇异点除去部的行延迟量的第4行存储器,
和根据上述移动检测结果信号、选择上述第3行存储器的输出和上述第4行存储器的输出来输出图像输出信号的选择器;
将由上述选择器所选择的图像输出信号输入到上述帧存储器。
4.具有下述特征的权利要求项3中记载的噪声消除装置:
还配备有:
被插入在上述第4行存储器和上述选择器之间的、对上述第4行存储器输出进行滤波处理的滤波器。
5.具有下述特征的权利要求项1或2中记载的移动检测装置:
上述比较部由对上述减法器的输出根据其值用任意的阈值进行多级加权处理的加权处理部构成;
上述块判别部,由:
对于来自上述第1行存储器的输出和第2行存储器的输出、求得上述块内的各像素的总和的第1加法器,
和根据上述加法器中的加法运算结果、用非线性连续函数做成针对上述块的中心像素的移动系数而输出的移动系数生成部构成。
6.具有下述特征的权利要求项5中记载的移动检测装置:
配备有:
对于来自上述加权处理部的输出、求得处于上述块内的同一行的像素的和的第2加法器,
和在来自上述第2行存储器的输出中、求得处于上述块内的同一行的像素的和的第3加法器;
上述奇异点除去部,
根据上述第2加法器结果和上述第3加法器的结果、修正上述移动系数,
在垂直方向扩大移动部分或者对于来自上述移动系数生成部的移动系数在水平方向扩大移动部分来除去在以块单位的处理中容易发生的奇异点。
7.一种噪声消除装置,其特征为:
配备有:
权利要求项5或权利要求项6中记载的移动检测装置,
和将上述图像输入信号延迟1行的第5行存储器,
和将从上述存储器所读出的帧或半帧延迟信号延迟1行的第6行存储器,
和求得来自上述第5行存储器的信号和来自上述第6行存储器的信号的差值的第2减法器,
和将上述第2减法器的输出乘以任意增益的第1乘法器,
和将第1乘法器的结果乘以由在权利要求项5或权利要求项6中记载的移动检测装置所输出的移动系数的第2乘法器,
和对上述第2乘法器的输出根据上述第2减法器中的减法运算结果的正负符号与上述第5行存储器的信号进行加减运算的加减法器;
将上述加减法器的图像输出信号输入到上述存储器,
上述存储器输出(1半帧-1行)或(1帧-1行)的延迟信号。
8.具有下述特征的权利要求项7中记载的噪声消除装置:
还配备有:
在水平和垂直方向和帧或半帧方向对每个像素切换多个增益的选择器;
上述第1乘法器对于上述第2减法器的输出乘以来自上述选择器的增益。
9.具有下述特征的权利要求项7或8中记载的噪声消除装置:
还配备有:
若上述第2减法器输出信号的绝对值为规定的电平以下、进行将上述第2减法器输出信号的绝对值连续地调整到比原来的值小的值、并输出到第1乘法器的电平调整部。
10.具有下述特征的权利要求项9中记载的噪声消除装置:
还配备有:
在上述图像输入信号和上述第5行存储器的信号中求得对应上述块内的像素的总和、并计算其平均信号电平的平均值电路,
和根据上述平均值电路的值调整由上述第1乘法器乘的增益的增益调整部。
11.具有下述特征的权利要求项10中记载的噪声消除装置:
配备有:
对于在权利要求项10中记载的噪声消除装置的输出、进行空间方向的低通滤波处理的滤波处理部,
和依据从权利要求项10中记载的噪声消除装置所得到的连续的移动系数的值、决定上述滤波处理部的输出和上述噪声消除装置的输出信号的比的混合系数运算部,
和依据在上述混合系数运算部所决定的混合系数、混合上述滤波处理部的输出和上述噪声消除装置的输出信号的混合处理部,
和依据上述噪声消除装置的输出信号抽出图像的轮廓部分的轮廓检测部,
由来自上述轮廓检测部的输出来切换上述混合处理部的输出和来自上述噪声消除装置的输出信号的第2选择器;
将由上述第2选择器所选择的信号输入到上述存储器。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002183891 | 2002-06-25 | ||
| JP183891/2002 | 2002-06-25 | ||
| JP2003032138 | 2003-02-10 | ||
| JP032138/2003 | 2003-02-10 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1663239A true CN1663239A (zh) | 2005-08-31 |
| CN100566379C CN100566379C (zh) | 2009-12-02 |
Family
ID=30002270
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB038149605A Expired - Fee Related CN100566379C (zh) | 2002-06-25 | 2003-06-24 | 移动检测装置及其利用该装置的噪声衰减装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7903179B2 (zh) |
| EP (1) | EP1515544A4 (zh) |
| JP (1) | JP3856031B2 (zh) |
| KR (1) | KR100687645B1 (zh) |
| CN (1) | CN100566379C (zh) |
| AU (1) | AU2003246185A1 (zh) |
| WO (1) | WO2004002135A1 (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101296288B (zh) * | 2007-04-24 | 2012-08-29 | 村田机械株式会社 | 图像处理装置以及图像处理方法 |
| CN102761682A (zh) * | 2011-04-28 | 2012-10-31 | 佳能株式会社 | 图像处理设备及其控制方法 |
| CN104780295A (zh) * | 2015-04-16 | 2015-07-15 | 中国科学院自动化研究所 | 一种基于噪声相关性的视频去噪系统 |
| CN108955897A (zh) * | 2018-08-13 | 2018-12-07 | 成都森川科技股份有限公司 | 运动货运列车测温还原方法 |
| CN109084900A (zh) * | 2018-10-17 | 2018-12-25 | 成都森川科技股份有限公司 | 一种移动物体热像拖尾像素检测方法 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100541961B1 (ko) * | 2004-06-08 | 2006-01-12 | 삼성전자주식회사 | 선명도 향상 및 잡음처리가 가능한 영상신호 처리장치 및방법 |
| US20060028562A1 (en) * | 2004-08-09 | 2006-02-09 | Martin Schmitz | Fast area-selected filtering for pixel-noise and analog artifacts reduction |
| US20070133893A1 (en) * | 2005-12-14 | 2007-06-14 | Micron Technology, Inc. | Method and apparatus for image noise reduction |
| JP2007274067A (ja) * | 2006-03-30 | 2007-10-18 | Mitsubishi Electric Corp | ノイズ除去装置、ノイズ除去方法、および映像信号表示装置 |
| JP4977444B2 (ja) * | 2006-10-31 | 2012-07-18 | 三星電子株式会社 | 動画像ノイズ除去装置および動画像ノイズ除去方法 |
| US8233094B2 (en) * | 2007-05-24 | 2012-07-31 | Aptina Imaging Corporation | Methods, systems and apparatuses for motion detection using auto-focus statistics |
| US20080310751A1 (en) * | 2007-06-15 | 2008-12-18 | Barinder Singh Rai | Method And Apparatus For Providing A Variable Blur |
| TWI336202B (en) * | 2007-07-06 | 2011-01-11 | Quanta Comp Inc | Noise reduction device and method |
| KR20090013548A (ko) * | 2007-08-02 | 2009-02-05 | 삼성전자주식회사 | 영상표시장치 및 그의 노이즈 제거 방법 |
| JP5052301B2 (ja) * | 2007-11-21 | 2012-10-17 | オリンパス株式会社 | 画像処理装置、画像処理方法 |
| US20090153739A1 (en) * | 2007-12-14 | 2009-06-18 | Texas Instruments Incorporated | Method and Apparatus for a Noise Filter for Reducing Noise in a Image or Video |
| JP4257382B1 (ja) * | 2007-12-26 | 2009-04-22 | 株式会社東芝 | ノイズリダクション装置、ノイズリダクション方法 |
| US8593572B2 (en) * | 2008-01-30 | 2013-11-26 | Csr Technology Inc. | Video signal motion detection |
| US10123050B2 (en) | 2008-07-11 | 2018-11-06 | Qualcomm Incorporated | Filtering video data using a plurality of filters |
| US8903191B2 (en) * | 2008-12-30 | 2014-12-02 | Intel Corporation | Method and apparatus for noise reduction in video |
| US9143803B2 (en) * | 2009-01-15 | 2015-09-22 | Qualcomm Incorporated | Filter prediction based on activity metrics in video coding |
| US20100238354A1 (en) * | 2009-03-18 | 2010-09-23 | Shmueli Yaron | Method and system for adaptive noise reduction filtering |
| JP5235807B2 (ja) * | 2009-07-23 | 2013-07-10 | 三菱電機株式会社 | ノイズ除去装置 |
| KR101674078B1 (ko) * | 2009-12-16 | 2016-11-08 | 삼성전자 주식회사 | 블록 기반의 영상 잡음 제거 방법 및 장치 |
| US8989261B2 (en) | 2011-02-23 | 2015-03-24 | Qualcomm Incorporated | Multi-metric filtering |
| US11010622B2 (en) * | 2018-11-02 | 2021-05-18 | Toyota Research Institute, Inc. | Infrastructure-free NLoS obstacle detection for autonomous cars |
| CN113438386B (zh) * | 2021-05-20 | 2023-02-17 | 珠海全志科技股份有限公司 | 一种应用于视频处理的动静判定方法及装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4090221A (en) | 1972-03-13 | 1978-05-16 | Bell Telephone Laboratories, Incorporated | Apparatus for improving video signal-to-noise ratio |
| US4240109A (en) | 1976-10-14 | 1980-12-16 | Micro Consultants, Limited | Video movement detection |
| US4240106A (en) | 1976-10-14 | 1980-12-16 | Micro Consultants, Limited | Video noise reduction |
| DE3121597C3 (de) | 1981-05-30 | 1993-09-30 | Bosch Gmbh Robert | System zur Verminderung des Rauschens in einem Fernseh-Bildsignal |
| US4661853A (en) | 1985-11-01 | 1987-04-28 | Rca Corporation | Interfield image motion detector for video signals |
| JP2579930B2 (ja) * | 1987-03-17 | 1997-02-12 | 株式会社東芝 | 複合信号分離回路 |
| DE3809249A1 (de) * | 1988-03-18 | 1989-09-28 | Thomson Brandt Gmbh | Bewegungsdetektor |
| US4933757A (en) * | 1988-08-20 | 1990-06-12 | Olympus Optical Co., Ltd. | Electronic endoscope apparatus provided with a movement detecting means |
| JPH0685577B2 (ja) * | 1989-01-18 | 1994-10-26 | 三洋電機株式会社 | サブサンプル映像信号復調装置 |
| JPH03117274A (ja) * | 1989-09-29 | 1991-05-20 | Mitsubishi Electric Corp | 雑音低減回路 |
| JPH0530391A (ja) * | 1991-07-18 | 1993-02-05 | Toshiba Corp | 動き検出回路 |
| US5386249A (en) * | 1992-01-22 | 1995-01-31 | Samsung Electronics Co., Ltd. | Video motion detector with full-band response except for diagonal spatial frequencies |
| JP3291597B2 (ja) * | 1993-06-07 | 2002-06-10 | 日本テキサス・インスツルメンツ株式会社 | 動き検出回路及びノイズ低減回路 |
| US5442407A (en) | 1994-03-22 | 1995-08-15 | Matsushita Electric Corporation Of America | Video signal noise reduction system using time-varying filter coefficients |
| KR100197368B1 (ko) * | 1995-12-23 | 1999-06-15 | 전주범 | 영상 에러 복구 장치 |
| US6037988A (en) * | 1996-03-22 | 2000-03-14 | Microsoft Corp | Method for generating sprites for object-based coding sytems using masks and rounding average |
| DE19636952C2 (de) | 1996-09-11 | 1999-11-04 | Siemens Ag | Verfahren zur Rauschreduktion eines Bildsignals |
| US6061100A (en) | 1997-09-30 | 2000-05-09 | The University Of British Columbia | Noise reduction for video signals |
| JP3285545B2 (ja) * | 1998-09-29 | 2002-05-27 | 松下電器産業株式会社 | 動き検出回路とノイズ低減装置 |
| JP3526020B2 (ja) | 1999-12-02 | 2004-05-10 | 松下電器産業株式会社 | ノイズ低減装置 |
| EP1137268A1 (en) | 2000-03-15 | 2001-09-26 | Koninklijke Philips Electronics N.V. | Video-apparatus with noise reduction |
| US6501794B1 (en) * | 2000-05-22 | 2002-12-31 | Microsoft Corporate | System and related methods for analyzing compressed media content |
| JP4270733B2 (ja) | 2000-09-14 | 2009-06-03 | 株式会社東芝 | 画像のサイズ変換方法及び装置 |
-
2003
- 2003-06-24 EP EP03738508A patent/EP1515544A4/en not_active Withdrawn
- 2003-06-24 JP JP2004515176A patent/JP3856031B2/ja not_active Expired - Fee Related
- 2003-06-24 CN CNB038149605A patent/CN100566379C/zh not_active Expired - Fee Related
- 2003-06-24 WO PCT/JP2003/007980 patent/WO2004002135A1/ja not_active Ceased
- 2003-06-24 KR KR1020047020952A patent/KR100687645B1/ko not_active Expired - Fee Related
- 2003-06-24 AU AU2003246185A patent/AU2003246185A1/en not_active Abandoned
- 2003-06-24 US US10/510,872 patent/US7903179B2/en not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101296288B (zh) * | 2007-04-24 | 2012-08-29 | 村田机械株式会社 | 图像处理装置以及图像处理方法 |
| CN102761682A (zh) * | 2011-04-28 | 2012-10-31 | 佳能株式会社 | 图像处理设备及其控制方法 |
| CN102761682B (zh) * | 2011-04-28 | 2015-09-09 | 佳能株式会社 | 图像处理设备及其控制方法 |
| CN104780295A (zh) * | 2015-04-16 | 2015-07-15 | 中国科学院自动化研究所 | 一种基于噪声相关性的视频去噪系统 |
| CN104780295B (zh) * | 2015-04-16 | 2018-03-30 | 北京思朗科技有限责任公司 | 一种基于噪声相关性的视频去噪系统 |
| CN108955897A (zh) * | 2018-08-13 | 2018-12-07 | 成都森川科技股份有限公司 | 运动货运列车测温还原方法 |
| CN109084900A (zh) * | 2018-10-17 | 2018-12-25 | 成都森川科技股份有限公司 | 一种移动物体热像拖尾像素检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1515544A4 (en) | 2008-03-12 |
| AU2003246185A1 (en) | 2004-01-06 |
| EP1515544A1 (en) | 2005-03-16 |
| WO2004002135A1 (ja) | 2003-12-31 |
| US20050168651A1 (en) | 2005-08-04 |
| KR100687645B1 (ko) | 2007-02-27 |
| US7903179B2 (en) | 2011-03-08 |
| JPWO2004002135A1 (ja) | 2005-10-27 |
| JP3856031B2 (ja) | 2006-12-13 |
| KR20050013151A (ko) | 2005-02-02 |
| CN100566379C (zh) | 2009-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1663239A (zh) | 移动检测装置及其利用该装置的噪声消除装置 | |
| CN1245033C (zh) | 用于调节彩色图像色饱和度的设备和方法 | |
| CN101036161A (zh) | 图像处理装置及图像处理程序 | |
| JP5299867B2 (ja) | 画像信号処理装置 | |
| CN1168289C (zh) | 轮廓校正装置 | |
| CN1308891C (zh) | 用于图象处理中边缘增强的装置和方法 | |
| CN1642220A (zh) | 图像处理装置、方法、程序及图像显示装置 | |
| CN1678022A (zh) | 在图像边界基于运动补偿的矢量 | |
| CN1279764C (zh) | 一种视频图像的色饱和度增强系统与方法 | |
| CN1229986C (zh) | 边缘校正方法和装置 | |
| CN1263313C (zh) | 一种视频图像的边缘清晰度提升系统与方法 | |
| KR101101434B1 (ko) | 이미지 선명도 향상 장치 | |
| KR101089902B1 (ko) | 디지털 이미지의 에지 영역 판단 장치 및 방법 | |
| CN1113525C (zh) | 视频信号的直方图运算单元 | |
| CN103516996A (zh) | 图像处理装置、图像处理方法和程序 | |
| CN1607833A (zh) | 用于视频信号降噪的设备和方法 | |
| JP5365878B2 (ja) | フィルタ装置、フィルタリング方法 | |
| CN1186922C (zh) | 图像信号轮廓校正装置 | |
| CN1228732C (zh) | 轮廓校正装置、轮廓校正方法 | |
| CN100351870C (zh) | 信号处理设备和方法 | |
| US9147231B2 (en) | Resolution determination device, image processing device, and image display apparatus | |
| JP5863236B2 (ja) | 画像処理装置、画像処理方法 | |
| JP5297897B2 (ja) | 画像信号処理装置 | |
| JP2011077797A (ja) | 画像処理装置、撮像装置、画像処理方法、及び、プログラム | |
| CN1293745C (zh) | 数字化电视后处理技术的视频图像自适应细节增强方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20091202 Termination date: 20180624 |