CN1607994A - 用于在cmp期间在晶片上施加向下的力的方法和设备 - Google Patents
用于在cmp期间在晶片上施加向下的力的方法和设备 Download PDFInfo
- Publication number
- CN1607994A CN1607994A CNA028262301A CN02826230A CN1607994A CN 1607994 A CN1607994 A CN 1607994A CN A028262301 A CNA028262301 A CN A028262301A CN 02826230 A CN02826230 A CN 02826230A CN 1607994 A CN1607994 A CN 1607994A
- Authority
- CN
- China
- Prior art keywords
- load cell
- wafer
- air bag
- power
- axle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 23
- 238000012544 monitoring process Methods 0.000 claims description 6
- 239000012530 fluid Substances 0.000 claims description 3
- 238000005259 measurement Methods 0.000 claims 1
- 238000005498 polishing Methods 0.000 abstract description 30
- 235000012431 wafers Nutrition 0.000 description 60
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 20
- 239000004576 sand Substances 0.000 description 18
- 239000000463 material Substances 0.000 description 9
- 229910052751 metal Inorganic materials 0.000 description 6
- 239000002184 metal Substances 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 239000003989 dielectric material Substances 0.000 description 5
- 230000006872 improvement Effects 0.000 description 4
- 239000007788 liquid Substances 0.000 description 4
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 3
- 239000004411 aluminium Substances 0.000 description 3
- 229910052782 aluminium Inorganic materials 0.000 description 3
- 229910052802 copper Inorganic materials 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000001965 increasing effect Effects 0.000 description 3
- 239000004814 polyurethane Substances 0.000 description 3
- 229920002635 polyurethane Polymers 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000002002 slurry Substances 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 108010022579 ATP dependent 26S protease Proteins 0.000 description 1
- 244000137852 Petrea volubilis Species 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 150000001398 aluminium Chemical class 0.000 description 1
- 230000008485 antagonism Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000002775 capsule Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 239000010410 layer Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 238000001465 metallisation Methods 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 238000007517 polishing process Methods 0.000 description 1
- 238000011112 process operation Methods 0.000 description 1
- 238000010926 purge Methods 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B37/00—Lapping machines or devices; Accessories
- B24B37/27—Work carriers
- B24B37/30—Work carriers for single side lapping of plane surfaces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/302—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26 to change their surface-physical characteristics or shape, e.g. etching, polishing, cutting
- H01L21/304—Mechanical treatment, e.g. grinding, polishing, cutting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B49/00—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B24—GRINDING; POLISHING
- B24B—MACHINES, DEVICES, OR PROCESSES FOR GRINDING OR POLISHING; DRESSING OR CONDITIONING OF ABRADING SURFACES; FEEDING OF GRINDING, POLISHING, OR LAPPING AGENTS
- B24B49/00—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation
- B24B49/16—Measuring or gauging equipment for controlling the feed movement of the grinding tool or work; Arrangements of indicating or measuring equipment, e.g. for indicating the start of the grinding operation taking regard of the load
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
Abstract
一种用于在CMP操作中将晶片施加到抛光带上的设备,包括具有上端和下端的心轴。晶片载具连接到所述心轴的下端。线性力发生器布置在所述心轴的上端。测压元件位于所述线性力发生器和所述心轴的上端之间。控制器连接到所述测压元件上以控制由所述线性力发生器施加的力。本发明还描述了一种用于在CMP操作中在晶片上施加向下的力的方法。
Description
技术领域
本发明涉及化学机械平坦化(CMP)技术以及,更具体地,涉及一种用于在CMP过程中在晶片上施加向下的力的方法和一种用于在CMP操作中将晶片施加到抛光表面的设备。
背景技术
在制造半导体装置中,需要执行化学机械平坦化(CMP)操作。通常,集成电路装置为多层构造。在基片层中,形成具有扩散区域的晶体管装置。在随后的层中,互相连接的金属化线被构图且电连接到该晶体管装置以制作出具有预期功能的装置。众所周知,被构图的导电层通过介电材料,例如二氧化硅与其它导电层绝缘。随着越来越多的金属化层及相关的介电层的形成,就越来越需要平坦化介电材料。如果没有平坦化,那么更进一步的金属化层的制造会因表面形貌的变异而变得更加困难。在其他应用中,金属化线图案形成于介电材料中,而后,执行金属CMP操作以移除多余的金属。
化学机械平坦化(CMP)系统通常用于按上述方法抛光晶片。CMP系统通常包括用于运送及抛光晶片表面的系统构件。该构件可以是,例如,轨道抛光垫或线性带状抛光垫。该抛光垫通常是由聚亚胺酯材料或聚亚胺酯配合其他材料(例如不锈钢带)制成。在操作上,移动该带状抛光垫并接着将液浆材料涂敷且散布在该带状抛光垫的表面上。在将液浆涂敷在带状抛光垫上之后,该带状抛光垫以一设定的速率移动,将晶片往下移动至该带状抛光垫的表面上。以此方法,欲平坦化的晶片表面大体上被平滑化,如同砂纸用于磨平木材一般。然后将该晶片在晶片清洁系统中清洁。
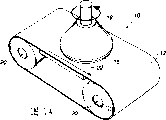
图1A示出了通常用于CMP系统中的线性抛光装置10。该线性抛光装置10将半导体晶片16表面上的材料抛光移除。被移除的材料可为晶片16的基片材料或在晶片16上形成的一个或更多的层。该层通常包括在CMP操作过程中形成或存在的一种或更多的任一类型的材料,例如,介电材料,氮化硅,金属(例如,铝和铜),金属合金,半导体材料等。通常,CMP可用于抛光晶片16上的一个或更多的层以平坦化晶片16的表面层。
该线性抛光装置10使用相对于晶片16的表面成线性移动的抛光带12。抛光带12是绕着滚轮20旋转的连续带。该滚轮通常由马达驱动从而滚轮20的旋转运动使得抛光带12相对于晶片16作线性运动22。
晶片16由抛光头18保持。晶片16通常通过机械保持环和/或通过真空保持就位。抛光头18将晶片放置在抛光带12之上并将晶片16向下移动到抛光带12上。抛光头18通过压力将晶片16施加到抛光带12上以使得晶片16的表面被抛光带12的表面抛光。抛光头18通常为心轴驱动组件30(如图1B中所示)的一部分,它能将抛光压力施加到晶片16上。
图1B示出了可用于在CMP系统10(如上图1A中所示)中将晶片16施加到抛光带上的常规的心轴驱动组件30。心轴驱动组件30包括连接到心轴42上的抛光头18。心轴42连接到力放大器34上,力放大器34的一端连接到铰链40上而另一端连接到空气气缸32上。力放大器34通常为机械加工的铝臂,该铝臂以与杠杆相似的方式动作,从而由空气气缸32施加的力被放大到心轴42上。然后心轴42向下推动抛光头18,抛光头18接着将压力施加到晶片16上以进行抛光动作(如图1A所示)。
通常,通过心轴驱动组件30可向晶片16施加3psi(磅/平方英寸)到10psi范围的压力。不幸地,在压力低于3psi时,心轴驱动组件30不能施加一致的、受控的压力。空气气缸32通常由气压伺服阀控制,该气压伺服阀使用来自位于抛光头18内的测压元件36的反馈。问题是心轴、抛光头以及其它构件的重量除了心轴之外没有被任何其他的构件支撑。这使得施加比连接到气缸32上的重量小的向下的力非常不稳定。同时,由于力放大器34,在气缸32处所作的小量压力调节可使得抛光头18施加的压力发生大的变化,因此对压力的控制非常困难。在特定情况下,不能控制小力的施加妨碍了晶片向下轻微接触抛光垫。由于心轴驱动组件30对于设置特定压力的固有的过调节使得这种情况经常发生。例如,如果欲将4psi的压力施加到晶片上,那么通常施加5psi的压力以抵消在心轴驱动组件30的各个部件中的摩擦力并移动所述心轴。因此,使用常规的压力施加系统来将低的抛光压力施加到晶片上是有问题的。
此外,由于空气气缸32与心轴驱动组件30的其余部分间接连接,因此经常发生抛光头18的稳定性降低。因此,经常难于达到将一致的抛光压力尤其是低的压力,施加到晶片上。
因此,需要一种能克服现有技术中的问题的设备,其通过具有向下力的施加设备来优化CMP系统中由抛光头施加到晶片上的抛光压力的控制。
发明内容
一般地说,本发明通过在化学机械平坦化(CMP)抛光操作过程中优化控制向下施加的力来满足这些需求。应理解,本发明可以用各种方式得以应用,包括工序、设备、系统、装置或方法。下面描述本发明的几个创新的实施例。
根据本发明的一个方面,提供了一种用于在CMP操作中将晶片施加到抛光表面上的设备。该设备包括具有上端和下端的心轴。晶片载具连接到该心轴的下端上。线性力发生器设置在所述心轴的上端。测压元件布置在线性力发生器和该心轴的上端之间。控制器连接到测压元件上以控制由线性力发生器施加的力。
在一实施例中,所述线性力发生器包括布置在测压元件上的下底板(下板)和支撑在下底板上方的上底板(上板)。线性力发生器还包括布置在下底板和上底板之间的气囊。在另一实施例中,测压元件板连接到心轴的上端上,且测压元件布置在测压元件板上。
根据本发明的另一方面,公开了一种用于在化学机械平坦化(CMP)过程中向晶片施加向下的力的方法。在该方法中,线性向下的力施加到心轴的上端。该心轴具有连接到其下端的晶片载具。该方法还监控施加到心轴上端的线性向下的力。
本发明具有很多优点。最显著的为,通过生成适于优化控制和施加到晶片上的线性向下的力的设备,可大大地改善对用于CMP中的抛光压力的控制。特别地,力发生组件可连接到心轴的上端,且心轴的下端可连接到晶片载具上。该结构能直接将力线性施加到晶片上。以这种方式,可扩大所施加的一致的力的范围并增强在晶片上的低的施加力。此外,这里描述的力施加设备增加了晶片载具的稳定性,其更进一步优化晶片处理。因此,力施加设备可非常有利地控制晶片抛光压力并改善晶片的处理效率。
应理解,以上的总体描述和下面的详细描述仅为示例性和解释性的,而不是对权利要求所要求的本发明的限制。
附图说明
结合于此并构成该说明的一部分的附图示出了本发明的示例性的实施例,并与描述一起用于解释本发明的原理。
图1A示出了通常用于CMP系统中的线性抛光设备。
图1B示出了常规的心轴驱动组件,其可用于在CMP系统(如上图1A所示)中将晶片施加到抛光带上。
图2A示出了根据本发明的一实施例的CMP系统。
图2B示出了根据本发明的一实施例的力施加组件。
图2C示出了根据本发明的一实施例带有替换的回动弹簧结构的改良的力发生组件。
图2D包括根据本发明的一实施例的改良的力发生组件。
图3示出了根据本发明的一实施例的力施加组件的操作框图。
具体实施方式
现在将参考附图详细描述本发明的几个示例性的实施例。已在上面的“背景技术”部分中描述了图1A和1B。应理解,尽管以下实施例描述了施加向下的力的设备,但是可倒置以下实施例以施加向上的力。在下面描述中,阐述了多个具体细节以便完全理解本发明。然而,本领域中的普通技术人员应当理解,在缺少某些或全部这些具体细节的情况下仍然可以实施本发明。在其他实施例中,公知的过程操作没有详细描述以避免不必要地混淆本发明。
图2A示出了根据本发明的一实施例的化学机械平坦化(CMP)系统100。载具头106是力施加组件118(如图2B所示)的一部分,其可用于在晶片抛光操作中将晶片104固定且保持就位。抛光带102绕过旋转鼓轮112a及112b形成连续的环。应理解,抛光带102可为任何适合类型的结构,例如单层的抛光垫、由不锈钢层支撑的抛光垫、多层抛光结构(例如,在缓冲层上的抛光垫而该缓冲层又附着在不锈钢层上)。还应该理解,这里所述的原理也适用于非带型的CMP系统,例如旋转装置。在一实施例中,抛光带102是用于线性CMP系统中的单层聚亚安酯抛光垫。抛光带102通常以每分钟约400英尺的速度沿由108指示的方向旋转。然而,该速度根据具体的CMP操作而变化。
当抛光带102旋转时,抛光液浆可涂敷且散布在该抛光带102的表面上。接着载具头106可用于将晶片104降低到旋转的抛光带102的表面上。以下参考图2B进一步详细描述力施加组件118。台板110可在抛光过程中支撑抛光带102。台板110可使用任何适合类型的支撑,例如空气支撑。以这种方式,晶片104的预定要平坦化的表面可以以均匀的方式被大体上平滑化。
在某些情况下,CMP操作用于平坦化例如铜(或其它金属)的材料,在其它情况下,它可用于移除介电层或介电物质与铜的组合层。通过调节抛光压力可改变平坦化的速率。抛光速率通常与由载具头106和晶片104施加到抛光垫上对抗台板110的抛光压力的量成比例。通过有效地操纵抛光速率,从晶片104的表面移除预定量的材料。当完成了抛光操作后,载具头106可用于将晶片104从抛光带102升起移开。然后晶片104可被送至晶片清洗系统中。因此由载具头106稳定且灵活地施加向下的力对于高效的晶片生产是极其重要的。
图2B示出了根据本发明的一实施例的力施加组件118。在该实施例中,力施加组件118包括连接到心轴126下端的晶片载具106和连接到心轴126上端的力发生组件120。在一实施例中,晶片载具106沿着大体的直接垂直线位于力发生组件120和心轴126的下面。应理解,心轴可为任何合适的形状,只要其能够将力发生组件120连接到晶片载具106上即可。在一实施例中,心轴126具有基本圆柱形的形状。心轴126的下端连接到晶片载具106上且其上端连接到力发生组件120上。应理解,心轴126可为任何合适的尺寸,这取决于欲使用在CMP系统100中的结构。
这里描述的力发生组件120包括位于心轴126上方的力施加组件118的部件。在一实施例中,力发生组件120可包括部件,例如测压元件124和气囊122以及它们附带的结构部件。在该实施例中,测压元件板130的底面与心轴126的上端连接。测压元件板130连接到弹簧135上,而弹簧135又连接到下底板132的底面上。测压元件124位于测压元件板130和下底板132之间。弹簧135与杆一起用于将下底板132拉到测压元件124上。因此,测压元件124在恒定的压力下安装到测压元件板130上,作为力施加组件118被支撑重量的一部分。在一实施例中,测压元件124可检测到约100磅到约150磅之间的力。测压元件124的顶端连接到下底板132的底面上。弹簧134连接到下底板132和上底板136上。气囊122位于下底板132和上底板136之间。弹簧134与连杆一起用于将下底板132拉到气囊122上,因此当空气从气囊122中释放时,弹簧134朝向上底板136将下底板132拉回。气囊隔板144在上底板136和下底板132之间维持一极小的空间。这里将包括上底板136、下底板132和气囊122的结构称为线性力发生器121,其布置在心轴126的上端,且测压元件124位于线性力发生器121和心轴126的上端之间。应理解,这里描述的线性力发生器121包括两块板、气囊和相关部件,但是其可为任何类型合适的装置,只要可以可控制的方式提供压力或力,例如电动机、液压装置、齿轮等。因为弹簧134和135在力发生组件120内的部件上保持不变的回动压力,所以一旦施加力时,测压元件124仅检测到晶片载具106抵靠抛光带的力。
应理解,气囊122可使用任何合适的气体或液体来向晶片载具106施加压力。在一实施例中,用清洁干净的空气使气囊122膨胀。这里使用的对于“空气”的引用可被替换为任何合适的气体或液体,例如氮等。空气管道138通过上底板136内的孔连接到气囊122上。空气管道138连接到伺服阀140上,伺服阀140控制向气囊122输入的空气以及从气囊122输出的空气。空气管道138还连接到可快速释放空气的快速排气装置143上。应理解,快速排气装置143可为任何合适的空气释放装置,例如螺线管、快速排气阀等。伺服阀140连接到输入端144(进入伺服阀)和输出端142(出白伺服阀)上。伺服阀140可用于控制从气囊122的空气输入和输出。或者,伺服放大器比较仪145可监控由测压元件124检测到的向下的力的量,该测压元件124用于控制伺服阀140来设置和/或维持由气囊施加到心轴126上的定量的向下的力。这里的伺服放大器比较仪145和伺服阀140也称为控制器。因此,控制器可连接到测压元件上以控制由线性力发生器121施加的力。下面参考图3进一步描述监控和施加向下的力的操作。
当空气从伺服阀140输入气囊122中时,气囊122的容积增大并膨胀。当气囊122膨胀时,它压靠上底板136和下底板132。在一实施例中,上底板136可被稳定,因此当气囊122膨胀时上底板136不会移动。下底板132下推到测压元件124上,测压元件124将向下的力传递给测压元件板130。测压元件板130直接将向下的力传递给心轴126。通过使用向下的力,心轴126向下移动并推动带有晶片的晶片载具106靠在抛光垫上以进行晶片抛光操作。因此,在一实施例中,由气囊122施加的直接线性向下的力传递给晶片载具以进行晶片抛光。
可调节气囊122中的气压以使得气囊在心轴上施加预定量的力。当气囊122中的气压降低时,弹簧134(当空气输入气囊122中时,其发生膨胀)收缩从而减少施加到下底板132上的力。当这种情况发生时,施加到晶片载具106上的向下的力减少,从而在CMP过程中施加到晶片上的抛光压力减少。因为在不使用力放大器的情况下向下的力以直接线性的方式施加,所以施加在气囊122上的小调节以直接线性的方式传递给晶片载具106。力施加组件118与常规力施加装置相比能在较大的范围内向晶片稳定地施加压力。
图2C示出了根据本发明的一实施例的带有可替换的回动弹簧结构的改良的力发生组件120’。在该实施例中,力发生组件120’具有连接到心轴126的上端的测压元件板130。测压元件弹簧148是位于测压元件板130下方的压缩弹簧。测压元件弹簧148与回动杆连接,该回动杆穿过测压元件板130并连接到下底板132上。通过使用压缩弹簧148,回动杆将下底板132拉到测压元件124上,测压元件124位于下底板132和测压元件板130之间。回动弹簧146位于下底板132的下方并连接到回动杆上,该回动杆穿过下底板132并连接到上底板136上。通过使用压缩弹簧146,回动杆将上底板136拉到气囊122上,气囊122位于下底板132和上底板136之间。气囊隔板144通过限制上底板136和下底板132之间空间的收缩来限制气囊122的压缩率。
当气囊122膨胀时,它压靠上底板136和下底板132。下底板132下推到测压元件124上,测压元件124向测压元件板130施加压力。下底板132的向下运动使支撑弹簧146膨胀。测压元件板130将由气囊122产生的压力直接传递给心轴126。心轴126推动带有晶片的晶片载具106靠在抛光垫上以进行晶片抛光操作。
当气囊122收缩时,施加到上底板136和下底板136(2)上的力减少,因此弹簧146收缩。当这种情况发生时,由气囊122施加的向下的压力减少,而心轴126施加到晶片载具106上的向下的力随之减少。因此在晶片载具106上的压力的减少使得在CMP过程中施加到晶片上的抛光压力减少。因为在不使用力放大器的情况下向下的力以直接线性的方式施加,所以施加在气囊122上的小调节直接传递给晶片载具106。该力施加组件与常规的力施加装置相比能在较大的范围内向晶片稳定地施加压力。
图2D包括根据本发明的一实施例的改良的力发生组件120″。在该实施例中,力发生组件120″具有力发生组件120’的结构和功能,但是其具有回动指示器162,它穿过上底板136与下底板132连接。该回动指示器162可将机构的回动通知给压力控制系统。位于回动指示器上方的传感器检测回动指示器162的位置,并移动以表明下底板132完全回动。此外,力发生组件120″包括测压元件放大器输出端164,其使得伺服放大器比较仪接收放大的测压元件信号。旋转管套126a可任选地安装到心轴126上。旋转管套126a使得心轴126旋转且在一实施例中允许空气和/或真空传递到载具头上。应理解,在该实施例中描述的心轴126(如参考图2B到3中所述)可选择地包括旋转管套126a。
图3示出了根据本发明的一实施例的力施加组件118的操作框图200。在框图200中,当空气输入到气囊122时,气囊122膨胀并下推到测压元件124上。测压元件124检测到由气囊122施加的力并通过测压元件放大器164向伺服放大器比较仪145发送力测量信号,伺服放大器比较仪145显示在测压元件124处检测到的线性向下力的量。来自测压元件124的信号是低压的,因此测压元件放大器164放该大力测量信号。伺服放大器比较仪145接收来自测压元件124的信号(该信号在一实施例中为模拟电压)并使用在测压元件124处检测到的压力的闭环监控。伺服放大器比较仪145监控来自测压元件124的信号。因此,伺服放大器124(伺服放大器比较仪145)可接收由测压元件检测到的关于线性向下力的量的信号,并将该力与力给定值202(在一实施例中为模拟电压)相比较,并通过操纵伺服阀140来调整线性向下力的量。在一实施例中,如果检测到的线性向下力的量低于力给定值202,那么伺服放大器比较仪就通知伺服阀140(通过传递一信号)将空气引入气囊122中,并且当检测到的向下力高于力给定值202时,伺服放大器比较仪就通知伺服阀将空气从气囊中释放。进入伺服阀140的空气管道可以包括气压以使空气引入气囊122中。阀排气装置206任选地安装到系统200上以便从气囊122快速地去除空气。
总之,该设备能将线性向下的力施加到带有晶片的晶片载具上,从而最佳化施加用于晶片抛光操作的向下的力的能力。此外,向下的力是以直接线性的方式施加的,因此施加在气囊上的小调节直接传递给晶片载具。
这里已根据几个示例性的实施例描述了本发明。在考虑了本发明的说明及实施后,本发明的其他实施例对于本领域的技术人员将是显然的。结合所附权利要求的限定的本发明,上述的实施例和优选特征应被认为是示例性的。
Claims (16)
1.一种用于在化学机械平坦化(CMP)操作中将晶片施加到抛光表面的设备,包括:
具有上端和下端的心轴;
连接到所述心轴的下端上的晶片载具;
线性力发生器,该线性力发生器设在所述心轴的上端;
测压元件,该测压元件位于所述线性力发生器和所述心轴的上端之间;以及
控制器,该控制器连接到所述测压元件上以控制由所述线性力发生器施加的力。
2.根据权利要求1所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,所述线性力发生器包括:
下底板,该下底板布置在所述测压元件上;
上底板,该上底板布置在所述下底板的上方;以及
气囊,该气囊位于所述下底板和所述上底板之间。
3.根据权利要求2所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,所述控制器包括:
伺服放大器比较仪,用于监控来自所述测压元件的信号;以及
伺服阀,用于将空气引入所述气囊中以及从所述气囊释放空气。
4.根据权利要求1所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,在所述心轴的上端布置有一测压元件板,且所述测压元件安装在所述测压元件板上。
5.一种用于在化学机械平坦化(CMP)操作中将晶片施加到抛光表面的设备,包括:
具有上端和下端的心轴;
连接到所述心轴的下端上的晶片载具;
测压元件板,该测压元件板连接到所述心轴的上端;
测压元件,该测压元件布置在所述测压元件板上;
下底板,该下底部布置在所述测压元件上;
上底板,该上底板支撑在所述下底板的上方;以及
气囊,该气囊位于所述下底板和所述上底板之间。
6.根据权利要求5所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,还包括:
伺服放大器比较仪,用于监控来自所述测压元件的信号。
7.根据权利要求6所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,还包括:
伺服阀,该伺服阀将流体引入所述气囊并从所述气囊释放流体。
8.根据权利要求7所述的用于在CMP操作中将晶片施加到抛光表面的设备,其特征在于,所述伺服放大器比较仪和所述伺服阀控制由所述气囊施加的力。
9.一种用于在化学机械平坦化(CMP)操作中在晶片上施加向下的力的方法,包括:
在心轴的上端施加线性向下的力,所述心轴具有连接到其下端的晶片载具;以及
监控施加到所述心轴的上端的线性向下的力。
10.根据权利要求9所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,所述监控施加到所述心轴的上端的线性向下的力的操作包括:
使用测压元件来测量施加到所述心轴的上端的线性向下的力。
11.根据权利要求10所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,使用气囊来施加所述线性向下的力,并且所述监控施加到所述心轴的上端的线性向下的力的操作包括:
调节在所述气囊中的气压以使得所述气囊在所述心轴的上端施加预定量的线性向下的力。
12.根据权利要求11所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,所述调节所述气囊中的气压的操作包括:可控制地向所述气囊增加空气。
13.根据权利要求12所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,所述调节所述气囊中的气压的操作包括:可控制地从所述气囊释放空气。
14.根据权利要求10所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,所述监控施加到所述心轴的上端的线性向下的力的操作还包括:
将由所述测压元件测量到的力与期望的力设定值进行比较。
15.根据权利要求14所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,所述比较操作包括:
判断由所述测压元件测量到的力是高于期望的力设定值还是低于期望的力设定值。
16.根据权利要求15所述的用于在CMP操作中在晶片上施加向下的力的方法,其特征在于,还包括:
如果由所述测压元件测量到的力高于期望的力设定值,则减少施加到所述心轴的上端的线性向下的力;以及
如果由所述测压元件测量到的力低于期望的力设定值,则增加施加到所述心轴的上端的线性向下的力。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/033,671 | 2001-12-27 | ||
| US10/033,671 US6712670B2 (en) | 2001-12-27 | 2001-12-27 | Method and apparatus for applying downward force on wafer during CMP |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1607994A true CN1607994A (zh) | 2005-04-20 |
Family
ID=21871758
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNA028262301A Pending CN1607994A (zh) | 2001-12-27 | 2002-12-20 | 用于在cmp期间在晶片上施加向下的力的方法和设备 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US6712670B2 (zh) |
| EP (1) | EP1467839A4 (zh) |
| JP (1) | JP2005514780A (zh) |
| KR (1) | KR20040066195A (zh) |
| CN (1) | CN1607994A (zh) |
| AU (1) | AU2002358257A1 (zh) |
| TW (1) | TWI226083B (zh) |
| WO (1) | WO2003057404A2 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2869604B1 (fr) * | 2004-04-28 | 2006-06-23 | Saint Gobain | Activation d'une surface de verre |
| EP1628202A1 (de) * | 2004-08-19 | 2006-02-22 | Ubs Ag | Daten-Ausgabe-System und Daten-Ausgabe-Verfahren mit Daten-Ausgabe-Überwachung |
| KR100796466B1 (ko) * | 2006-08-31 | 2008-01-21 | 인하대학교 산학협력단 | 반도체 웨이퍼 폴리싱 장치의 유동헤드장치 |
| JP5365243B2 (ja) * | 2009-02-19 | 2013-12-11 | 凸版印刷株式会社 | ベルト搬送研磨機 |
| FR2980386B1 (fr) * | 2011-09-27 | 2014-09-12 | Visioptimum Internat | Dispositif de polissage de lentilles optiques |
| JP5973883B2 (ja) * | 2012-11-15 | 2016-08-23 | 株式会社荏原製作所 | 基板保持装置および研磨装置 |
| US9662761B2 (en) * | 2013-12-02 | 2017-05-30 | Ebara Corporation | Polishing apparatus |
| US10363647B2 (en) | 2016-02-05 | 2019-07-30 | Toshiba Kikai Kabushiki Kaisha | Grinding tool |
| US10350722B2 (en) | 2016-02-05 | 2019-07-16 | Toshiba Kikai Kabushiki Kaisha | Polishing apparatus |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5498199A (en) * | 1992-06-15 | 1996-03-12 | Speedfam Corporation | Wafer polishing method and apparatus |
| US5795215A (en) * | 1995-06-09 | 1998-08-18 | Applied Materials, Inc. | Method and apparatus for using a retaining ring to control the edge effect |
| GB9512262D0 (en) * | 1995-06-16 | 1995-08-16 | Bingham Richard G | Tool for computer-controlled machine for optical polishing and figuring |
| US5653622A (en) * | 1995-07-25 | 1997-08-05 | Vlsi Technology, Inc. | Chemical mechanical polishing system and method for optimization and control of film removal uniformity |
| DE29513946U1 (de) * | 1995-08-30 | 1997-01-09 | Weber, Georg, 96317 Kronach | Vorrichtung zum Andrücken eines umlaufenden Schleifbandes |
| US5762536A (en) * | 1996-04-26 | 1998-06-09 | Lam Research Corporation | Sensors for a linear polisher |
| JPH1071560A (ja) * | 1996-08-27 | 1998-03-17 | Speedfam Co Ltd | ウエハ加圧装置 |
| US5738568A (en) * | 1996-10-04 | 1998-04-14 | International Business Machines Corporation | Flexible tilted wafer carrier |
| JP3763975B2 (ja) * | 1998-07-21 | 2006-04-05 | 株式会社荏原製作所 | トップリング制御装置及びポリッシング装置 |
| US6352466B1 (en) * | 1998-08-31 | 2002-03-05 | Micron Technology, Inc. | Method and apparatus for wireless transfer of chemical-mechanical planarization measurements |
| US6241593B1 (en) * | 1999-07-09 | 2001-06-05 | Applied Materials, Inc. | Carrier head with pressurizable bladder |
| US6439978B1 (en) * | 2000-09-07 | 2002-08-27 | Oliver Design, Inc. | Substrate polishing system using roll-to-roll fixed abrasive |
-
2001
- 2001-12-27 US US10/033,671 patent/US6712670B2/en not_active Expired - Fee Related
-
2002
- 2002-12-20 JP JP2003557747A patent/JP2005514780A/ja active Pending
- 2002-12-20 WO PCT/US2002/040942 patent/WO2003057404A2/en active Application Filing
- 2002-12-20 AU AU2002358257A patent/AU2002358257A1/en not_active Abandoned
- 2002-12-20 KR KR10-2004-7010047A patent/KR20040066195A/ko not_active IP Right Cessation
- 2002-12-20 CN CNA028262301A patent/CN1607994A/zh active Pending
- 2002-12-20 EP EP02792495A patent/EP1467839A4/en not_active Withdrawn
- 2002-12-25 TW TW091137408A patent/TWI226083B/zh not_active IP Right Cessation
-
2004
- 2004-02-10 US US10/776,477 patent/US20040161939A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP1467839A4 (en) | 2008-06-18 |
| AU2002358257A8 (en) | 2003-07-24 |
| WO2003057404A2 (en) | 2003-07-17 |
| TW200305211A (en) | 2003-10-16 |
| US20040161939A1 (en) | 2004-08-19 |
| KR20040066195A (ko) | 2004-07-23 |
| AU2002358257A1 (en) | 2003-07-24 |
| WO2003057404A3 (en) | 2003-12-04 |
| JP2005514780A (ja) | 2005-05-19 |
| EP1467839A2 (en) | 2004-10-20 |
| TWI226083B (en) | 2005-01-01 |
| US20030139115A1 (en) | 2003-07-24 |
| US6712670B2 (en) | 2004-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5871390A (en) | Method and apparatus for aligning and tensioning a pad/belt used in linear planarization for chemical mechanical polishing | |
| US7314401B2 (en) | Methods and systems for conditioning planarizing pads used in planarizing substrates | |
| USRE39194E1 (en) | Method and apparatus for controlling planarizing characteristics in mechanical and chemical-mechanical planarization of microelectronic substrates | |
| US6458015B1 (en) | Chemical-mechanical planarization machine and method for uniformly planarizing semiconductor wafers | |
| US6428404B2 (en) | Web-format planarizing machines and methods for planarizing microelectronic substrate assemblies | |
| US6833046B2 (en) | Planarizing machines and methods for mechanical and/or chemical-mechanical planarization of microelectronic-device substrate assemblies | |
| US7182668B2 (en) | Methods for analyzing and controlling performance parameters in mechanical and chemical-mechanical planarization of microelectronic substrates | |
| US7357695B2 (en) | Systems and methods for mechanical and/or chemical-mechanical polishing of microfeature workpieces | |
| JP4757580B2 (ja) | 研磨方法及び研磨装置、並びに研磨装置制御用プログラム | |
| US6561870B2 (en) | Adjustable force applying air platen and spindle system, and methods for using the same | |
| CN1607994A (zh) | 用于在cmp期间在晶片上施加向下的力的方法和设备 | |
| US6607426B2 (en) | Polishing apparatus | |
| JP2018001325A (ja) | ヘッド高さ調整装置およびヘッド高さ調整装置を備える基板処理装置 | |
| US7001254B2 (en) | Apparatus and method for conditioning a contact surface of a processing pad used in processing microelectronic workpieces | |
| US20040018808A1 (en) | Belt tensioning assembly for CMP apparatus | |
| US6878048B2 (en) | CMP belt stretch compensation apparatus and methods for using the same | |
| KR102685999B1 (ko) | 기판 프로세싱 시스템을 위한 방법 및 평탄화된 멤브레인 | |
| US6767427B2 (en) | Apparatus and method for conditioning polishing pad in a chemical mechanical planarization process | |
| JP2000061816A (ja) | 研磨圧変調cmp装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| AD01 | Patent right deemed abandoned | ||
| C20 | Patent right or utility model deemed to be abandoned or is abandoned |