CN1235528A - 具有神经元芯片通信的外科模块 - Google Patents
具有神经元芯片通信的外科模块 Download PDFInfo
- Publication number
- CN1235528A CN1235528A CN97199219A CN97199219A CN1235528A CN 1235528 A CN1235528 A CN 1235528A CN 97199219 A CN97199219 A CN 97199219A CN 97199219 A CN97199219 A CN 97199219A CN 1235528 A CN1235528 A CN 1235528A
- Authority
- CN
- China
- Prior art keywords
- module
- user
- running parameter
- data communication
- communication bus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















































































Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/30—Controlling members actuated by foot
- G05G1/305—Compound pedal co-operating with two or more controlled members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/13—Trolleys, e.g. carts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/15—Mayo stands; Tables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
- A61F9/00745—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/007—Methods or devices for eye surgery
- A61F9/00736—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments
- A61F9/00763—Instruments for removal of intra-ocular material or intra-ocular injection, e.g. cataract instruments with rotating or reciprocating cutting elements, e.g. concentric cutting needles
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C19/00—Electric signal transmission systems
- G08C19/16—Electric signal transmission systems in which transmission is by pulses
- G08C19/28—Electric signal transmission systems in which transmission is by pulses using pulse code
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/63—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for local operation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H3/00—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection
- H02H3/12—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection responsive to underload or no-load
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3201—Scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00026—Conductivity or impedance, e.g. of tissue
- A61B2017/0003—Conductivity or impedance, e.g. of tissue of parts of the instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00057—Light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00137—Details of operation mode
- A61B2017/00154—Details of operation mode pulsed
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00137—Details of operation mode
- A61B2017/00154—Details of operation mode pulsed
- A61B2017/00181—Means for setting or varying the pulse energy
- A61B2017/00185—Means for setting or varying the pulse height
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00137—Details of operation mode
- A61B2017/00154—Details of operation mode pulsed
- A61B2017/00181—Means for setting or varying the pulse energy
- A61B2017/0019—Means for setting or varying the pulse width
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00199—Electrical control of surgical instruments with a console, e.g. a control panel with a display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00221—Electrical control of surgical instruments with wireless transmission of data, e.g. by infrared radiation or radiowaves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
- A61B2017/00429—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping with a roughened portion
- A61B2017/00433—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping with a roughened portion knurled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
- A61B2017/00482—Coupling with a code
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00544—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated pneumatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00973—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00973—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated
- A61B2017/00977—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated the depression depth determining the power rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/15—Mayo stands; Tables
- A61B2050/155—Mayo stands
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/18—Cupboards; Drawers therefor
- A61B2050/185—Drawers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
- A61B2090/3614—Image-producing devices, e.g. surgical cameras using optical fibre
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/007—Auxiliary appliance with irrigation system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/20—Holders specially adapted for surgical or diagnostic appliances or instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting-in contact lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G12/00—Accommodation for nursing, e.g. in hospitals, not covered by groups A61G1/00 - A61G11/00, e.g. trolleys for transport of medicaments or food; Prescription lists
- A61G12/001—Trolleys for transport of medicaments, food, linen, nursing supplies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/12—General characteristics of the apparatus with interchangeable cassettes forming partially or totally the fluid circuit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/50—General characteristics of the apparatus with microprocessors or computers
- A61M2205/502—User interfaces, e.g. screens or keyboards
- A61M2205/505—Touch-screens; Virtual keyboard or keypads; Virtual buttons; Soft keys; Mouse touches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/60—General characteristics of the apparatus with identification means
- A61M2205/6063—Optical identification systems
- A61M2205/6081—Colour codes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H3/00—Mechanisms for operating contacts
- H01H2003/008—Mechanisms for operating contacts with a haptic or a tactile feedback controlled by electrical means, e.g. a motor or magnetofriction
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H2300/00—Orthogonal indexing scheme relating to electric switches, relays, selectors or emergency protective devices covered by H01H
- H01H2300/04—Programmable interface between a set of switches and a set of functions, e.g. for reconfiguration of a control panel
Abstract
本友明是一种用来控制多个连接在其上的眼科显微手术器械的系统。这些显微手术器械供用户,例如一位外科医生,在执行眼科手术处理时使用。该系统含有一个数据通信总线和一个连接在该数据通信总线上的用户界面(3)。用户界面(3)向/从用户提供/接收代表显微手术器械的信息。该系统还含有一些手术模块(13),这些手术模块(13)连接在一些显微手术器械上并至少根据一个工作参数控制这些器械。各手术模块(13)也被连接在数据通信总线上。数据通信总线在用户界面和各手术模块之间提供代表工作参数的数据的通信。
Description
技术领域
本发明一般地涉及显微手术和眼科系统,具体地涉及一种用于操作显微手术器械的控制系统。
本发明的背景
当前的眼科显微手术系统提供了一个或多个与一个控制柜相连接的手术器械。这些器械常常用电力或气动力操作,而控制柜则提供操作器械的电控或液压控制信号。通常控制柜含有几种不同类型的人工操作控制器,用来产生施加对手术器械的控制信号。外科医生常利用脚踏式控制器来遥控手术器械。
普通的控制柜含有一些按钮开关和可调旋钮,用以设定所希望的系统工作特性。普通的控制系统通常有几种不同的功能。例如,典型的眼科显微手术系统具有(眼球)前部和/或后部手术能力并可能含有各种功能,诸如灌注/抽吸、玻璃体手术(vitrectomy)、显微剪刀切割、光纤照明、和破碎/乳化等功能。
虽然普通的显微手术系统和眼科系统有助于实现显微手术和眼科手术,但它们不是没有缺点的。显微手术和眼科系统比较昂贵,常常由医院和诊所购买以供不同专科的外科医生合用。例如在眼科手术中,一些外科医生可能专长于前部处理,而另一些医生则可能专长于后部处理。由于这些处理的差异,控制系统对两种处理不能设定相同的工作特性。而且,由于眼科手术的精细特性,对于在几个不同医院工作的、使用不同厂商和型号的器械的医生来说,可能需要特别注意系统的响应特性或“感觉”。
美国专利NO.4,933,843、5,157,603、5,417,246和5,455,766公开了一些改进的显微手术控制系统,这些专利的受权人都与本申请的相同,其全部公开内容均在此引用作为参考。例如,这些系统在提供足够的灵活性以适应许多不同处理的同时,还提供了性能特性的改进的一致性。这些专利中给出的系统对以往技术的改进在于,提供了一种可编程的通用显微手术控制系统,该系统可以容易地被编程得能执行许多不同的手术处理,并可被编程得能提供任何特定医生所需的响应特性。控制系统被预先编程得能执行许多不同的功能,以提供许多不同的功能。这些预先编程好的功能可以通过按下前面板上的按钮来选择。
除了预先编程的功能之外,这些专利还公开了向每个医生提供一个编程钥匙,其中含有装载有那个医生所选择的特定响应特性参数和特定手术处理参数的数字存储电路。通过把钥匙插入到系统控制柜的插座中,系统将自动地设定到各个医生所熟悉的响应状态上。
为了得到最大的灵活性,控制柜的按钮和电位器旋钮都是可编程的。它们的功能和响应特性可被改变得能适合于医生的需要。控制柜上的一个电子显示屏显示出各个可编程按钮和旋钮的当前功能和其他有关信息。显示屏是自照明的,所以能在黑暗的手术室内容易地判读。
尽管上述系统对以往技术作出了改进,但为了改善性能、简化操作、简化修理和更换、减少修理时间和费用等等,还需要作进一步的改进。
本发明公开的内容
在本发明的各个目的中,值得提出的是准备实现以下这样的系统:允许在系统的各个部件之间进行网络通信的改进系统;模块式的这种系统;允许对其各部件进行分布式控制的这种系统;在开机时能自动重新构形的这种系统;允许在一些不同模式下工作的这种系统;能以预定顺序工作于不同模式的这种系统;允许适应于各种不同构形的这种系统;容易重新编程的这种系统;以及可经济地实现和实际商业化的这种系统电路。
简单地说,一种实现本发明一些方面的系统能控制与它相连的多个眼科显微手术器械。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个数据通信总线和一个连接在该数据通信总线上的用户界面。用户界面向/从用户提供/接收代表各显微手术器件的工作参数的信息。该系统还含有第一和第二手术模块。每个手术模块连接到一个显微手术器械上,并根据至少一个工作参数控制该器械。两个手术模块还连接到数据通信总线上,该总线提供用户界面与第一、第二手术模块之间的代表工作参数的数据的通信。具体地说,数据可以在两个手术模块之间传送,和/或在用户界面与一或两个手术模块之间传送。
本发明的另一个实施例是一种用来控制多个连接在其上的眼科手术器械的系统。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个数据通信总线和一个连接在该总线上的用户界面。用户界面向/从用户提供/接收代表各显微手术器械的工作参数的信息。该系统还含有一个手术模块和一个遥控电路。手术模块连接在一个显微手术器械上并根据至少一个工作参数控制该器械。遥控电路连接在一个遥控单元上并根据至少一个工作参数控制该单元。遥控单元的工作能在执行手术处理过程中改变显微手术器械的工作参数。手术模块和遥控电路都还连接到数据通信总线上,该总线提供用户界面、手术模块和遥控电路之间的代表工作参数的数据的通信。具体地说,数据可以在手术模块与遥控电路之间和/或在用户界面与手术模块和/或遥控电路之间传送。
本发明的又一个实施例是一种用来控制多个连接在其上的眼科显微手术器械的系统。用户,例如一位外科医生,在执行眼科手术处理时使用这些手术器械。该系统含有一个用来向/从用户提供/接收代表显微手术器械的工作参数的信息的用户界面。该系统还含有一个用来存储多个工作参数的存储器。一个中央处理器从该存储器提取一组关于各显微手术器械的工作参数。由中央处理器提取的这组工作参数接近于用户通过用户界面所提供的一组由医生选取的特定的工作参数。该系统还含有一个连接到一个显微手术器械上并根据从存储器提取的那组工作参数来控制该器械的手术模块。
本发明的再一个实施例是一种用来控制多个连接在其上的眼科显微手术器械的系统。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个用来向/从用户提供/接收代表显微手术器械的工作参数的信息的用户界面。该系统还含有一个用来存储多个工作参数的存储器,这些工作参数可以根据用户选取的模式从存储器提取。每个模式代表一个或多个要执行的手术处理,并由至少一个显微手术器械的工作所定义。一个中央处理器从存储器提取关于准备在某一选定模式中使用的显微手术器械的一组工作参数。该系统还含有一个与一个显微手术器械相连接并根据从存储器所提取的那组工作参数来控制该器械的手术模块。
实现本发明一些方面的另一种系统控制多个连接在其上的眼科显微手术器械。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个数据通信总线和一个连接在该数据通信总线上的用户界面。该用户界面含有一个中央处理器,用来向/从用户提供/接收代表显微手术器械的工作参数的信息。该系统还含有一个与一个显微手术器械相连接并根据至少一个工作参数控制该器械的手术模块。该手术模块连接在数据通信总线上,含有一个用来存储一些用于控制在手术处理过程中连接在其上的相应显微手术器械的可执行例行程序的闪速(flash)EEPROM(可电擦除编程只读存储器)。数据通信总线提供用户界面与模块之间的代表工作参数的数据的通信,中央处理器根据用户所提供的信息通过数据通信总线对闪速EEPROM重新编程。
在另一个实施例中,本发明是一种用来控制多个连接在其上的眼科显微手术器械的系统。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个数据通信总线和一个连接在该数据通信总线上的用户界面。该用户界面含有一个中央处理器,用来向/从用户提供/接收代表显微手术器械的工作参数的信息。该系统还含有一个连接在一个显微手术器械上并根据至少一个工作参数控制该器械的手术模块。该手术模块连接在数据通信总线上,后者提供用户界面与该模块之间的代表工作参数的数据的通信。在该例中,中央处理器执行一些例行程序以识别和初始化该模块通过数据通信总线的通信。
本发明的又一个实施例是一种用来控制多个连接在其上的眼科显微手术器械的系统。用户,例如一位外科医生,在执行眼科手术处理时使用这些显微手术器械。该系统含有一个用户界面,后者向用户提供和显示并从用户接收下述信息,这些信息代表眼科处理的工作参数和医生在执行眼科处理时所要使用的显微手术器械的工作参数。用户通过用户界面选择特定的处理。该系统的一个抽吸模块可以容纳各种不同的显微手术盒,每个盒内都有不同的带色插片。每种颜色代表该显微手术盒所适用的处理。该系统还含有一个传感器,用来在手术盒被放入系统后探测带色插片的颜色,进而当系统所接纳的手术盒的带色插片颜色与所选的特定处理不符合时将向用户界面提供信息。
另外,本发明也可以包括各种其他的系统和方法。
关于其他的目的和特点一部分是显然的,一部分将在下面的说明中指出。
附图的简单说明
图1是根据本发明的显微手术控制系统的透视图,该系统配合眼科显微手术器械使用,并包括多个模块;
图2是图1系统的方框图;
图3是图1系统的基本单元的透视图;
图4是取去前盖后的基本单元透视图;
图5是基本单元底座的前视图;
图6是基本单元底座的顶面图;
图7是基本单元的后视图;
图8是基本单元前盖的左侧视图;
图9是图1系统一个典型模块的透视图;
图10是该模块的后视图;
图11是该模块的部分底面图;
图12是一个典型的基本单元与模块组件的透视图;
图13是当一个模块安装在基本单元中时沿图7中5B-5B线的平面中的部分截面图;
图14是沿图13中5C-5C线的平面中的部分截面图;
图15是根据本发明的通信网络的原理图;
图16是用来可选择地终止图15网络的终止电路的原理图;
图17和18是根据图1系统一个优选实施例的用户界面计算机的方框图;
图19是用于图17-18用户界面计算机的通信网络电路的方框图;
图20是当选择了终止网络时对图19网络电路的终止电路的原理图;
图21是图1系统的方框图,说明在根据本发明的系统中的数据流动情况;
图22是根据本发明的数字键盘的示例性屏幕显示;
图23和24是示例性流程图,说明用户界面计算机中的中央处理器为确定系统的工作模式和模式序列的操作;
图25和26是示例性流程图,说明用户界面计算机中的中央处理器为修改系统设置文件的操作;
图27-30是用户界面计算机为选择一个根据本发明的工作模式而产生的示例性屏幕显示;
图31是示例性流程图,说明用户界面计算机中的中央处理器为自动对系统构形而进行的操作;
图32是根据图1系统的一个优选实施例的灌注、抽吸和/或玻璃体模块的方框图;
图33是根据图1系统的一个优选实施例的晶状体乳化(phacoemulsification)和/或晶状体破碎(phacofragmentation)模块的方框图;
图34是根据图1系统的一个优选实施例的空气/液体交换、电剪刀和/或电镊子模块的方框图;
图35是根据图1系统的一个优选实施例的双极凝结(biopolarcoagulation)模块的方框图;
图36是根据图1系统的一个优选实施例的照明模块的方框图;
图37是根据图1系统的一个优选实施例的外设脚控电路的方框图;
图38是根据图1系统的一个优选实施例的外设静脉注射柱控制电路的方框图;
图39是根据图1系统的一个优选实施例的电源模块的方框图;
图40-42是说明图3-8基本单元中的通信和电源底板的原理图;
图43-60是说明图32的灌注、抽吸和/或玻璃体模块的原理图;
图61是说明配合图32和43-60的灌注、抽吸和/或玻璃体模块使用的盒子探测器的原理图;
图62-88是说明图33的晶状体乳化和/或晶状体破碎模块的原理图;
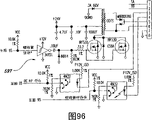
图89-103是说明图34的空气/液体交换、电剪刀和/或电镊子模块的原理图;
图104-113是说明图19的双极凝结模块的原理图;
图114-125是说明图36的照明模块的原理图;
图126-136是说明图37的脚控电路的原理图;
图137-146是说明图38的静脉注射柱控制电路的原理图;
图147和148是说明一个压力探测电路的原理图,该电路配合根据图32和43-60的灌注、抽吸和/或玻璃体模块的另一实施例的一个涡旋泵使用;
图149和150是说明图39的电源模块的原理图,该模块用于向图40-42的底板提供电源。
实施本发明的方式
图1示出根据本发明一个优选实施例的显微手术控制系统,该系统总的用代号1表示。如图所示,系统1含有:一个带有一个平面显示器5的计算机单元了;一个能容纳多个模块13的基本单元7;以及一些周边设备,例如一个脚控组件15和一个电机驱动的静脉注射(Ⅳ)柱组件17(它们都用相应的代号代表其整体)。安装在基本单元7中的每一个模块13都能控制医生在执行各种眼科手术处理时所使用的至少一个眼科显微手术器械19。如本技术领域所周知的,眼科显微手术涉及到使用许多不同的器械19以执行不同的功能。这些器械19包括玻璃体切割器、晶状体乳化器械或晶状体破碎器械、微型电剪刀、光纤照明器、凝结器械和本技术领域所知的其他显微手术器械。为了优化器械19在手术中的性能,它们的工作参数应根据例如下述各个因素改变:所进行的特定处理,处理的不同阶段,医生的个人习惯、在病人眼球的前部还是后部进行处理等等。
如图1所示,有一个承载了系统1的仪器小车,其总的代号为21。小车21最好含有:一个手术盘(或Mayo盘)25,自动IV柱组件17,一个用于存放脚控组件15的存储仓27,一次性物件和其他物件,一个可容纳扩展的基本单元(图1中未示出)的空间33,以及几个万向轮35。基本单元7和计算机单元3最好如图1所示置于仪器小车21的顶部,Mayo盘25安装在最好是一个固定在仪器小车21顶部、直接位于基本单元7下方的活节臂(未示出)上。仪器小车21上还载有一个总的由代号39代表的遥控发射器,用于遥控系统1。
根据本发明,基本单元7中的各模块13含有一些关于各种显微手术器械19的控制电路,使该系统的用户能对系统1进行构形,以优化医生对它的使用。如下面将详细说明的,模块13含有一些连接器或端口,以连接一个或多个显微手术器械19,并设置有用于控制连接在其上的一个或多个特定器械19的操作的必要的控制电路。这样,用户可以通过把所需的模块13插入到基本单元7中来对系统1进行构形,使得能符合特定外科医生的习惯,控制特定手术处理所需的各个器械,或者优化医生对系统1的使用。
如下面将详细说明的,脚控组件15和IV柱组件17都含有用来控制它们工作的电子控制电路。
为了支持用户可构形性能,计算机单元3、每个模块13、以及每个外部设备即脚控组件15和IV柱组件17的控制电路将构成一个计算机网络上的一些节点。计算机网络提供电源分配和各节点之间的对等数据通信。
现在参见图2的方框图,基本单元7含有一些模块13,这些模块控制在执行眼科手术处理时典型使用的各种显微手术器械19。在一个优选实施例中,每个模块13控制与之相连的一个或多个手术器械19。位于一个底板101(详细示于图5和40-42)上的一个电源总线和一个数据通信总线把各个模块13相互连接起来。当各模块13被放置到基本单元7内时,它们将通过位各自后面的一个连接器(例如图10中的连接器171)与底板101相咬合。咬合后,底板101将分配给各模块13以电源,并提供各模块13之间的和各模块13与计算机单元3之间的数据通信。根据本发明,各模块13还含有一个位于基本单元7内的电源模块103,该模块既与外部的交流电源相连,又与底板101相连。电源模块103给底板101供电,从而给系统1供电。
根据本发明,控制电路105(见图37和126-136)控制脚控组件15,控制电路107(见图38和137-146)控制IV柱组件17。如上所述,计算机单元3、各个模块13、以及周边设备的控制电路105、107构成了一个计算机网络上的节点。计算机网络提供各节点之间的对等数据通信。换言之,每个模块13都可以直接与其他模块13、周边设备、和计算机单元3通信。这样,系统1提供了几个不同器械19的模块式控制,还提供了用户可构形能力。
现在参见图3,基本单元7构成了一个框架,该框架含有用来接纳多个对外科医生在执生眼科手术处理时所使用的各种手术器械19的工作进行电子控制的模块13的位置和插槽。基本单元7最好含有:一个底座(总的用109代表)、一个倒立槽形的顶盖111、和一个前盖或前压框113,该前盖可以如图4所示那样被取下,以插入或拔出各个模块13。当前盖113就位并被固紧时,其后壁115将使各模块13定位在基本单元7中,由此构成一个把各模块保持在框架内的容器。前盖113用两个拧在底座109前面的两个螺纹孔117内的固定螺丝(未示出)固定。或者,前盖113也可用卡簧固定。顶盖111上有4个圆形下凹119,用来接纳计算机单元3底部的4个脚。这些下凹119都做成为锥形,以适配计算机单元脚的形状并使它们与下凹的中心对准。
如图5和6所示,底座109包括一个与底面板123形成一体的后面板121。底面板123沿垂直于底板101的前平面(即前表面)的方向伸展,底板101用螺丝125固紧在后面板121上。在底板101的前表面上设置有10个18针的母电连接器127。图5中最左端的三个连接器127间隔为3英寸,其余连接器127之间的间隔为1.5英寸。各个连接器127的每个针插座与其他各连接器相应信置的针插座互相并联,从而构成前述的电源和数据通信总线。在后面板121的底板101上方设有一些固定式百页窗131,使空气可从基本单元7逸出(图5)。在后面板121的底板101下方有一个大体为矩形的开口133,用来接纳下面将说明的位于电源模块103背面的一个三端连接器。类似地,在后面板121上还有一个圆形开口135,用来接纳灌注/抽吸/玻璃体(IAV)模块(例如图31和43-60中的模块321)背面的一个气动快速断开连接器(未示出)。在底面板123上用螺丝139(图6)固定了13条平行的轨道,它们都用137表示。各轨道137以均匀间隔1.5英寸设置,并沿垂直于底板101前表面的方向延伸。一条或多条轨道137用来把模块13导引到基本单元7内的恰当位置处,使它们能与底板101准确地对准。如图14所示,各条轨道137都有工形的横载面,即含有上、下两个水平凸椽(分别由141、143表示),中间由一条垂直臂145连接。
转至图5,从底面板123向下伸出4个脚141,其大小做得可座落在压制于手术小车21上的下凹(未示出)中。如图6所示,在底面板123上设有一个进气网栅153,以让空气进入基本单元7对模块13冷却。图7示出安装在后面板121背面上的2个圆形9针母电连接器157。这两个连接器157都并联在底板101的数据通信总线上,以与小车21(包括IV柱组件17)、计算机单元3、或脚控组件15等周边设备通信。连接器157也可以用来把基本单元7与一个下面将详细说明的分开的扩展基本单元相连接。虽然可以认为其他的连接器也属于本发明的范畴,但本优选实施例中的连接器是Amphlnol Corporation of Wallingford(美国康耐狄克州)所销售的703系列电连接器。
图9至11示出一些用来对外科医生在执行眼科手术处理时所使用的手术器械19的工作进行电控制的示例性模块13。图9所示的示例性模块是用来对底板101的电源总线供电的电源模块103。每个模块13都有一个用薄铝板做成的外壳161和一个塑料模压的前盖163。如图12所示,有些模块13在其前盖163上设有一个或多个接口,用来把各种手术器械(未示出)连接到该模块上。图9所示的电源模块103宽度为3英寸。其他模块有不同的宽度,但都是1.5英寸的倍数(例如1.5英寸或4.5英寸)。每个模块13在其前盖163上都安装有一个绿色发光二极管(LED)165或其他目视指示器,用来指示该模块处于工作状态。
转到图10,每个模块13都有一个与底板101上的任一个母连接器127相匹配的18针公电连接器171。连接器171缩在外壳161里面以保护连接器和使基本单元7中提供的空间最大化。在模块外壳161的后表面上18针连接器171上方设置有一个排气口175,其邻近还有一个冷却风扇173,以把空气从外壳161排出,冷却模块13中的元部件。
参见图11,在前盖163的底部形成有一个凹口177,用来托住模块13向/从基本单元7滑入/取出。在模块外壳161的底部有一个开口179,以使风扇173工作时空气能进入模块,冷却模块13中的元部件。每个模块外壳161的底壁183上都形成一个或多个槽缝181。各个槽缝181都从外壳161的后壁185伸出,其形状可以接纳基本单元底座109下面板123上的轨道139,以导引模块13并使其连接器171与底板101上的相应连接器127对准。这样,轨道137和槽缝181构成一个导引系统,使各个模块13以其连接器127对准于向总线连接的方式被导引到框架内。
如图14所示,在模块外壳161底壁183每条槽缝181的上方都点焊了一个通道187,以防止小异物通过槽缝181进入外壳,还可以屏蔽外壳内的电子元部件使之不受电磁干扰。当模块13被导入基本单元7时,每条基本单元轨道137都将以图14所示方式被容纳在相应的槽缝181和通道187内,也就是说,上水平突椽141可在通道187内滑动,而垂直臂145可在下面的槽缝181内滑动。垂直臂145与槽缝181之间的咬合和上突椽141与外壳底壁183之间的咬合把模块13定位在基本单元7中,并基本上防止了模块沿垂直于轨道的水平和垂直方向运动。
不过,轨道137和槽缝181的尺寸做得允许模块13与基本单元7之间可以有一些运动(例如1/16英寸),以使模块连接器171的各针脚可以正确地对准于底板连接器127的针插座。连接器127和171都具有锥形,以便即使起初两个连接器有一定的不对准量(例如0.1英寸),也能把针脚导引到针插座内。虽然轨道和槽缝的尺寸使得可以有一些运动,但它们所造成的不对准量不能超出两个连接器所能容许的程度。因此,对轨道137和槽缝181分别给出了适当的公差,但它们能以使各个模块连接器127对准于总线连接的方式把各个模块13导引到框架内。
模块外壳161底壁183的邻近于各条槽缝的部分可以与各条轨道137的下突椽143相咬合,以分隔开外壳161和基本单元底座109,并使模块13和基本单元7之间的金属与金属接触最小化。虽然在图11所示的示例性模块13中有两条槽缝181,但在其他模块中则可根据其宽度而设置一条或多条槽缝。例如,1.5英寸宽的模块13有一条槽缝181,而4.5英寸宽的模块有3条槽缝。
当模块13被安装到基本单元7内时,如图13所示,排气口175和风扇173将对准于基本单元后面板121上的百页窗131,以便在冷却风扇工作时能使模块中的空气自由地排出。类似地,模块的进气口179将对准于基本单元底面板123上的网栅153,以让空气从基本单元7的外部进入模块13。
每个模块13还都提供有过电流保护,以保证一个模块的故障不至于损坏系统1的其他部件。
如图9和12所示,各个模块13的前盖163都带有斜表面191,这些斜面从前表面193开始沿着前表面的两侧向后延伸。斜表面191向着前表面193互相靠扰,使得当一个模块13被放入基本单元7内另一个模块的边上时,一个模块的一个斜表面将与另一模块的一个斜表面相邻,而两个相邻模块的共面的前表面将横向分开一个距离D。相邻模块前表面之间的横向分开可减小这两个前表面之间不对齐时的“易察觉程度”。于是可以允许较大的零件公差而不至影响系统1的外观。
如前所述,当模块13被安装到基本单元7内时其连接器171将与底板101上的连接器127相连。当公、母连接器相连时模块13内的各个相应电路将连接到底板101中的电源和数据通信总线上。不论模块13位于基本单元7中的哪个位置,同样的模块电路都将与同样的电源和数据通信总线电路相连。于是,各模块13一般是可互换的,并可以在基本单元7中以任意次序排列。此外,由于每个模块13是分开控制的,所以只需在基本单元7中安装那些控制特定手术处理的模块。因此,前述框架被设计得能在电源和数据通信总线的多个不同位置上接纳各模块13,使它们可以有选择地在框架中以多种不同的次序组织在一起。
不过,电源模块103在基本单元7中有一个专门的位置,以使它可以方便地通过基本单元后面板121上的矩形开口133与外部电源相连。由于电源模块103的宽度是3英寸,所以图5中最左端的两个连接器127之间的间距为3英寸。图5左端第二个和第三个连接器之间的间距允许在电源模块103旁边插入一个有3英寸或4.5英寸宽的模块。如果使用一个IAV(例如图32和43-60中的模块321),则它必须安装在图5最右端的三条轨道137上。如前所述,从IAV模块321背面伸出一个气动快速解脱连接器。由于该连接器必须从基本单元后面板121上的圆形开口135伸出,所以IAV模块321只能安装在最右端的位置上。如果不使用IAV模块,则除了电源模块之外任何其他模块都可以安装在最右端位置处。除了上述的例外情形之外,如前所述,各个模块13是完全可以互换的,并可以任何希望的次序安装。这样,基本单元7被构形成可以在框架内的多个不同位置上接纳模块13,而且这些模块可以在框架内以多种不同次序有选择地组织。由于模块的模块式结构和与底板101之间的可脱离咬合,所有模块13都能不借助于任何工具而快速地从基本单元7前方装入或取出。这种快速安装和取出方便了模块的维修和更换。例如,如果某一特定模块13需要修理,它可容易地被取出并运往修理场所。在修理期间,可以用另一个模块来替代使用,或者系统1可以在不使用该特定模块13的情形下工作。
此外,如图8所示,从基本单元7的前盖113后表面上伸出有一个突柱195。突柱195住位于前盖上,使得当在基本单元内安装了模块13的情况下安装上前盖时,该突柱将插入电源模块103的一个开口195(图9)中。于是当取走基本单元前盖113时,一个位于电源模块103的开口197后面的互锁开关(例如图39中的互锁开关783)将切断对各模块13的供电。这样,当底板101激活时用户不能触及它,另外,在每次起动(后面将参考图31说明)时都要检查各模块在框架内的特定布局,而不取下前盖113就不能改变这一布局。于是通过在取走前盖113时切断供电可保证不经过检测就不能改变模块13的布局。
参见图2,系统1还可以含有一个扩展连接器203(见图16),用来把基本单元7连接到一个任选的扩展基本单元207上,由此来扩展网络。扩展基本单元207在物理上和功能上都与基本单元7基本相同。在本发明的一个实施例中,用户可以通过用扩展连接器203把基本单元7后面板121上的任一个9针连接器157连接到扩展基本单元207的相应连接器上,来扩展网络,从而扩展系统1的工作能力。该优选实施例的扩展基本单元207具有其自身的电源模块211。因此扩展连接器203只连接两个单元的数据通信总线而不连接电源总线。不过应该看到,用单个电源模块来给两个单元供电也没有偏离本发明的范畴。当用单个电源模块时,将通过扩展连接器203把基本单元7底板101上的电源总线连接到扩展基本单元207底板209上的电源总线上,而对扩展基本单元207供电。
现在参见图15,数据通信总线最好包含一个双绞线电缆215,其中有一个第一导线217和一个第二导线219。在一个优选实施例中,连系系统1各部件的计算机网络属于Echelson Corporation以商标LONTALK销售的类型,它采用RS485通信协议。RS485标准提供了在一个平衡双绞传输线上进行多点数据传送的平台。每个模块13都有一个RS485发送接收机223和一个与之相耦合的处理器225,前者用来从/向数据通信总线接收/发送数据。Motorola(摩托罗拉)制造了一种型号为MC143150、名为NEURON的指定芯片,适用于处理器225;National Semiconductor制造了一种型号为75156的指定芯片,适用于发送接收机223。
数据通信总线、发送接收机223和处理器225一起构成了通信网络;而模块13、计算机单元3,脚控组件15的控制电路105、和IV柱组件17的控制电路107则利用该网络互相通信。通过利用该网络,系统1提供了其各部件之间的对等通信。
在这样一个网络中,处理器225在这里也被称作“神经元”或“神经处理器”(NEURON(神经元)是Echelon Corporation的注册商标)。每个神经元处理器225最好包括3个8比特的当地处理器。其中2个当地处理器构成一个通信子系统,使信息能在网络各节点之间传送。第三个当地处理器执行一个内设的应用程序。这样,神经处理器225除了起到通信处理器的作用之外,还控制连接在其上的显微手术器械。模块13的神经处理器225最好能接收通过数据通信总线通信的数据,并能在响应该数据时产生控制显微手术器械19的控制信号。
如图所示,发送接收机223分接到双绞电缆215的第一和第二导线上。在本发明的一个优选实施例中,双绞电缆215位在底板101上(即是底板101上的印刷线)。这样,当模块13后面的连接器171与底板101相连时,它们将分接到双绞电缆215上。如前面参考图5所说明的,底板101还含有一对附加的数据电缆连接器157,用来把数据电缆连接到底板101上。数据电缆含有双绞电缆,把数据通信总线从底板101延伸到计算机单元3和周边设备上。例如,一条数据电缆从一个数据电缆连接器157通向计算机单元3,另一条数据电缆则从另一个数据电缆连接器157直接通向脚控组件15或者经过仪器小车21通向IV柱组件17和脚控组件15。
根据RS485协议,双绞电缆215的每个端头都必须用一个电阻,例如120Ω的电阻,来终止。然而,对终止的要求使扩展网络变得困难。本发明有益地提供一个如图16所示的位于双绞电缆一端的终止电路229,用来以一个120Ω的电阻有选择地终止网络,并允许容易地扩展网络。
图16示出用来有选择地终止数据通信总线的终止电路229。如图所示,数据通信总线(即双绞电缆215)由RS485-HI线和RS485-L0线表示。终止电路229最好是扩展连接器203的一部分,并串连在第一双绞电缆215的第一和第二导线217和219之间。在一个实施例中,终止电路229含有一个与终止数据通信总线的120Ω电阻相串连的常闭开关231。为了扩展网络,用户把一个带有与扩展基本单元207相连的第二双绞电缆235的扩展电缆233连接到扩展连接器203上。与第一双绞电缆215相似,第二双绞电缆235也有用来与终止电路229连接的第一导线237和第二导线239。根据本发明,第二双绞电缆235位在底板209上并构成扩展单元207的数据通信总线。
终止电路229还含有一个连接在一个正电压源上的线圈243。当用户把扩展基本单元207的扩展电缆233连接到扩展连接器203上时,线圈243将被接地。结果正电压将激励线圈243使它断开常闭开关231。于是当第一双绞电缆215的第一、第二导线217、219被分别连接到第二双绞电缆235的第一、第二导线237、239的端部时,开关231将断开,从而除去了终止。这时终止将出现在扩展基本单元207的另一端。在一个优选实施例中,扩展基本单元207的扩展电缆233或者底板209也含有终止电路229。
图16还示出了标记有RESET-HI(复原-高)和RESET-L0复原-低)的两条线。计算机单元3最好通过数据通信总线和底板101把复原信号传送给安装在基本单元7中的模块13,并通过总线和底板209把复原信号传送给安装在扩展基本单元207中的模块13。
根据本发明的一个优选实施例,扩展基本单元207有它自己的电源模块211。所以在基本单元7与扩展基本单元207之间不存在电源分配问题。在另外的实施例中,也可以在底板101和209上设置电源总线,以把电源模块103提供的电源分配给系统1的每个模块13,而不论该模块13位在基本单元7中还是位在扩展基本单元207中。
现在参见图17-18的方框图,计算机单元3包括:一个内设的中央处理器245、至少一个软驱247、和一个内部硬驱249。在本发明的一个优选实施例中,计算机单元3的中央处理器245是一个IBM兼容微处理器板,它例如含有一个Intel486或Pentium(英特尔486或奔腾)处理器和一个工业标准的AT母板。软驱247是一个普通的3.5英寸1.44MB软驱,硬驱249是一个普通的IDE3.5英寸内部硬驱,其存储量最少为250MB。在另一个实施例中,计算机单元3除了软驱247外还含有一个CD-ROM(只读光盘)驱动器251。计算机单元3还含有:平面显示器5、与之配合使用的触措屏255、和各种多媒体硬件配件,例如视频卡或显示驱动器259、声卡261和扬声器263。计算机单元3的各种扩展板最好与标准的PC(个人计算机)体系相兼容。
计算机单元3构成一个用户界面,用户(例如一个外科医生、医院技师或助理)利用它接收代表显微手术器械19和周边设备的各种工作参数的信息,这些器件和设备提供了执行手术处理时所需的不同功能。用户也通过计算机单元3所提供的图形用户界面向系统1提供信息。计算机单元3的硬驱249最好存储有关于每个显微手术器件19和周边设备的可编程工作参数。通过借助于用户界面向中央处理器245提供信息,用户可以对存储在硬驱245内的工作参数进行重新编程或选择。然后计算机单元3通过底板101、扩展数据电缆及其网络,把工作参数传送给各个模块13和脚控组件15以及IV柱组件17。这样,用户便能够在手术中优化器械19的性能。
在一个实施例中,用户把代表许多工作参数的数据存储在一个与计算机单元3的软驱247配合使用的可取走的存储器中,例如一个软盘中。在该实施例中,计算机单元3的中央处理器245根据存储在可取走存储器中的数据,确定一组关于显微手术器械19和周边设备的工作参数。例如,被中央处理器245确定的这组工作参数包括一组由医生选择的特定工作参数。类似地,计算机单元3的硬驱249存储了一些约定的省缺参数,这些参数可能近似地匹配于用户所提供的特定参数组。
作为一个例子,工作参数确定了用来控制各种器械19的下述一个或几个参数:线性可变的剪切(速)率;固定的剪切率;单次激活剪切;按比例地控制剪刀的闭合程度;空气/液体的压力;空气/液体的流率;线性可变的双极功率大小;固定的双极功率大小;照明强度;抽真空压力大小(以下简称“真空度”或“真空”);抽吸流率;线性可变的玻璃体切割率;固定的玻璃体切割率;单次激活玻璃体切割;晶状体乳化功率大小;晶状体破碎功率大小;晶状体乳化脉冲率;和晶状体破碎脉冲率。
周边设备的控制电路105、107也构成计算机网络上的节点,并至少根据一个工作参数工作。在上例中,工作参数还确定了周边设备的下述一个或多个参数:多个脚控档次;和静脉注射柱高度。
再参见图17-18,计算机单元3还含有一个红外(IR)接收器电路267,用来接收来自手持遥控器39的IR信号。IR信号最好代表控制系统1的操作的命令。例如,遥控器39是一个在大小和外形上都类似于标准电视机或录像机遥控器的无线红外发射器。该单元提供视线范围内的操作,最好采用某种发射/接收编码方案,以尽量减小受其他红外发射器和/或接收器干扰的危险。关于该单元的功能,遥控器39的键盘最好包括用来改变抽吸率、双极凝结功率、和超声功率(用于晶状体乳化和破碎)以及IV柱高度的控制按钮;以及用来通断照明设施和改变照明设施给出的光强的控制按钮。在一个优选实施例中,遥控器39还含有用来按预定的工作模式顺序使当前模式改变为下一模式或返回前一模式的控制按钮。
此外,计算机单元3还含有一个专门为显微手术系统1设计的网络板271。该专用的网络板271含有用来把计算机单元3连接到网络上去的发送接收机223和神经元处理器225。网络板271最好用作中央处理器245与触摸屏255、IR接收器267、以及手术模块13、脚控组件15、和IV柱组件17之间的接口。
在一个优选实施例中,计算机单元3的中央处理器245与各个模块13以及脚控组件15和/或IV柱组件17的控制电路的神经元处理器225协同工作,以按照两个软件等级层次来执行软件。软件等级的第一层次是在用户(即外科医生队伍)与本发明的显微手术系统1之间提供接口的用户界面。本文中所用的“用户界面”一词一般地是指计算机单元3,具体地是指计算机单元3为产生一系列让用户与系统1相互交流的功能性屏幕显示而执行的例行程序。
用户界面在平面显示器5上显示工作参数和它们的设定值以及其他的条件。用户界面也接收来自触摸屏255、脚控组件15或IR遥控器39的输入,以把系统1的工作调整到符合于外科医生的当前手术处理。用户界面最好是一个基于Microsoft Windows′95(微软视窗95)环境的界面,它能提供高度图形化的、用户友好的操作环境,能产生图标、符号等等。其结果是,该用户界面简化了系统1的使用,特别适合于与触摸屏255配合使用。
系统软件的第二个层次是模块13、控制电路105和107所使用的内设控制环境。如前所述,系统1的每个部件都构成了计算机网络上的一部分,使得用户界面能够通过一个预定的通信体系,例如Echelson LONTALK通信体系,与各个内设软件通信。
模块13和周边设备对内设软件程序的使用提供了系统1的分布式控制。换言之,每个模块13和周边设备都可独立于其他模块13和周边设备工作,但仍然通过网络保持着连系。这样,一个部件的失效将不会影响系统1其他部件的功能。每个模块13和周边设备除了有内设的控制软件之外还有内设的测试电路,使得能识别特定的故障并通过计算机单元3向用户报告。工作时,每个模块13和周边设备的工作状态用一个软件监守计时器(例如见图32中的监守计时器)不断地检验。
根据本发明,计算机单元3特别适用于象系统1这样的模块式系统。硬驱249存储操作系统1的各种程序,包括正常存储在模块13中的程序。如果某一模块13中的程序有问题或需要更新,用户可以通过网络把相应的程序从硬驱249下载给模块13,由此实现该程序的重新编制。软驱247也允许用户安装软件的更新或对应于新模块的专用软件。这样,系统1的软件也配合着硬件的模块式设计具有模块式性质。此外,用户可以使用软驱247把系统1中的用户设定参数保存、装载和传送到位于其他地点的另一个显微手术系统去。
计算机单元3利用声卡261和扬声器263产生声音信号,以给出警告消息、报警、或其他声响指示。此外,声卡261和扬声器263也与图像卡259和CD-ROM驱动器251协作提供声/视或多媒体信息,例如以不同语种提供在线维护模拟和说明手册以及操作演示等。
平面显示器5和触摸屏255是系统1与用户之间进行交流的基本工具。在一个实施例中,平面显示器5是一个复盖了触摸屏255的有源阵列液晶显示器(LCD)(对角线长10.4英寸,VGA分辨率,有源阵列LCD、256种颜色)。触摸屏255最好是一种设在防水框内的不会与常用消毒液发生化学反应的模拟电阻式触模屏。
计算机单元3最好还含有一个自己的电源275。在另一实施例中基本单元7的电源模块103向计算机单元3供电。
图19说明计算机单元3的专用网络板271。如图所示,该网络板271含有一个RS485网络连接器电路277、一个网络管理器/控制器电路279、和一个RS485终止电路281。用电路277、279和281为计算机单元3通过数据通信总线进行通信提供网络接口是有益的。网络板271还含有一个ISA总线连接器283、一个ISA总线发送接收机285和一个ISA总线接口电路287,例如一个可电编程的逻辑器件(EPLD)。电路283、285和287提供网络板271与中央处理器245之间的接口。
此外,网络板271为触摸屏255、平面显示器5和IR遥控器39提供电路连接和接口。在本例中,网络板271含有一个通过串行连接器291连接在中央处理器245和通过一个柔性电路连接器293连接在平面显示器5上的触摸屏控制器/编码器289。柔性电路连接器293还把背景光亮度控制器295连接到平面显示器5上,把IR接收器267连接到IR遥控解码电路297上。网络板271还含有一个与计算机单元3上的一个编码器旋钮(未示出)配合使用的亮度控制连接器299,用户可用它来控制平面显示器5的亮度。在本例中,遥控器39还提供一个用来改变显示强度的控制钮,使亮度控制连接器接收到的输入被通过IR遥控解码器297引导到总线接口电路287上。接着,总线接口电路287向亮度控制器295提供为改变平面显示器5的亮度所需的控制信号。
如图19所示,在本发明的一个优选实施例中网络板271还含有一个监守计时器和复原电路301。
现在参见图20,这里以原理图的形式示出了终止电路281。除了关于基本单元7的扩展连接器203的终止电路229之外,网络板271也提供了终止电路281,用来有选择地终止数据通信总线的计算机单元这一端。在本例中,终止电路281含有一个与一个约120Ω的电阻相串连的常闭开关303。为了在这一端(不是扩展连接器203那一端)扩展网络,用户可以从一个周边设备连接一条扩展电缆(未示出)到第一跳接器305或者第二跳接器307上。跳接器305、307最好能为把一些附加的周边设备连接到系统1的网络上提供手段。例如,用户可以通过一个与跳接器305或307相关的连接器(未示出)而不是通过连接器157把脚控组件15或其他周边设备连接到网络上。
根据本发明的一个优选实施例,来自准备连接到网络上的周边设备的扩展电缆将短路跳接器305,307上的一对终止开关接点。在本例中,连接到跳接器305上的一条周边设备扩展电缆将使TERMSWITCH(终止开关)1A与TERM SWITCH 1B之间短路。类似地,一条连接到跳接器307上的周边设备扩展电缆将使TERM SWITCH 2A与TERM SWITCH 2B之间短路。如图20所示,终止电路281也含有一个连接在正电压源上的线圈309。在一个优选实施例中,当TERMSWITCH 1A与1B和TERM SWITCH 2A与2B都被短路时,线圈309将接地,从而被激励。线圈309被激励的结果是,常闭开关303断开,除去终止。这时终止将出现在数据通信总线的周边设备那一端。
图21说明根据本发明一个优选实施例的系统1中的数据流动情况。安装在基本单元7中的每个模块13最好控制一个或几个能提供几种不同手术功能的显微手术器械19。例如,器械19能提供:眼内压力(IOP)、剪切、镊子控制、超声(例如晶状体乳化或破碎)、灌注、抽吸、玻璃体切割、双极凝结和/或照明等功能。在系统1的一个示例性设置中,模块13含有一个文氏管(Venturi)IAV模块321和一个涡旋(scroll)IAV模块323,它们都控制系统1的灌注、抽吸和玻璃体手术功能。文氏管IAV模块321与一个文氏管泵配合使用,而涡旋IAV模块323则与一个涡旋泵配合使用。模块13还含有一个用来控制晶状体乳化和破碎功能的晶状体模块325和一个用来控制剪切功能的剪刀模块327。此外,剪刀模块327也控制镊子功能,并含有用来控制IOP功能的空气/液体交换控制电路。如图21所示,模块13还含有一个用来控制双极凝结功能的凝结模块329和一个用来控制照明功能的照明模块331。
本发明的该实施例还含有作为周边设备连接在系统1的网络上的脚控电路105和IV柱控制电路107。文氏管IAV模块321、涡旋IAV模块323、晶状体模块325、剪刀模块327、凝结模块329、照明模块331、以及脚控组件15和IV柱组件17的控制电路105、107最好各自都构成网络上的节点。
如上所述,用户为了优化手术的性能,可以对工作参数编程,或者从一组省缺工作参数中选取工作参数,或者直接从用户界面输入工作参数。如图21的示例性系统设置所示,计算机单元3将接着把这组工作参数通过线335传送给模块13。然后每个工作的模块13根据至少一个用户输入的或省缺的工作参数提供控制信号,以控制连接在其上的一个或几个显微手术器械19。此外,计算机单元3通过线337控制多个器械19和IV柱组件17的开关,并通过线339接收关于它们工作状态的反馈。脚控组件15的控制电路105既通过线341提供线性控制(例如借助于它的踏板),又通过各个模块13的线343提供离散控制(例如借助其按钮)。还有,脚控组件15还借助其可编程的功能键根据计算机单元3的指令提供对系统1的控制。应该理解,本发明的数据通信总线运载了在线335、337、339、341和343上通信的数据。数据通信总线最好是一个能运载所有类型信号的双向串行总线。所以,线335、337、339、341和343代表了系统1中的数据流,但不代表数据通信总线。
此外,系统1的网络提供其各节点之间的对等通信。例如,有可能要在接上了脚控组件15时使用户界面不激活。换言之,当医生使用脚控组件15遥控器械19时要防止用户改变器械19的工作参数。这时,脚控组件15直接通过网络与用户界面和其他模块13通信,以提供对等通信。类似地,有可能因安全性的原因而希望某些器械19不能同时工作。例如,在使用双极凝结器件时它将使晶状体乳化器械不激活,或者相反。反之,在晶状体乳化或破碎时却需要有抽吸功能。所以需要通过网络进行晶状体模块325与文氏管IAV或涡旋IAV模块323之间关于这两个功能的信息通信。
现在讨论关于用户界面工作的一个例子,起初有一个开始屏幕显示,让用户选择关于患者眼睛前部或后部的各种可能的手术功能,或者让用户选择用于对系统1编程或执行其他设定功能的一个工具程序。不论用户选择了前部还是后部,计算机单元3最好都在平面显示器5上显示出一个外科医生选择菜单。根据本发明,硬驱249存储了该菜单中所列的每位医生的一组特定的初始工作参数。在响应用户选择时,计算机单元3将根据用户的选择以相应的那组初始工作参数把工作部分设定为前部或后部。如果菜单上没有列出某位特定的外科医生,则计算机单元3将以省缺工作参数把工作部分设定为前部或后部。然后,如果需要,医生可以在省缺工作参数基础上改变工作参数。
在该例中,如果用户在开始屏幕上选择了任选项“工具”,则计算机单元3将在平面显示器5上显示一个工具屏幕。在本例中,计算机单元3把工作模式设定为“无”。工具程序允许用户修改各种系统设定(例如,给外科医生选择菜单修改或添补新的医生,修改过去保存的初始工作参数或添加新的初始工作参数,访问用户帮助信息等)。
在本发明的一个优选实施例中,用户界面建立触摸屏255上的一些专用部分,用于各种选择或信息窗口。例如,产生一些初级窗口用于显示抽吸、晶状体乳化、晶状体破碎、玻璃体手术、剪刀和线性凝结等功能。然后用户可以得到一些次级窗口,用于显示非线性凝结、IOP、照明、IV柱、和脚控构形等功能。用户界面最好还利用一些功能选择键(见图27),让用户能够选择系统1的当前工作模式、激活或退激活某些手术功能(如凝结功能)、显示在线帮助、或退出系统1。如果需要,用户的功能选择键也可以包括对一种或几种选择的多重选择,并扩展为显示这些额外的选择。
在操作中,用户可以利用用户界面的手术功能界面规定不同的工作参数,使之符合外科医生的特定习惯。一般,手术功能界面采用一些显示来代表各种被激活的显微手术系统功能(例如文氏管抽空、涡旋抽空、玻璃体手术、超声、凝结、剪切、照明等)。在一个优选实施例中,手术功能界面以数字或图形的形式显示工作参数和显示工作设定点和/或各种功能的开关状态。计算机单元3的中央处理器245还执行例行程序来产生各种控制图标,用于调整各个工作参数和/或开关某些功能。例如,在执行文氏管抽空功能时,界面提供一个旋钮或向上/向下控制钮,以加大或减小当前的抽空工作参数。该界面还利用一些按钮控制来指导一些功能。例如,当执行抽吸功能时,医生在开始排除某一抽吸管道内的空气之前典型地需预先指定抽吸管道。该指定功能最好用一个按钮在屏幕上指明。除了旋钮式按钮控制之外,该界面还使用渐进条来指明当前的工作参数在其预设的最小和最大值之间的位置。例如,如果在晶状体破碎时超声功率为最大功率的20%,则渐进条将在一个左端标有0%、右端标有100%的窗口内复盖20%的位置。
现在参见图22,中央处理器245最好在响应于用户触摸触摸屏255上对应于一个或几个工作参数值的数字显示部分时,能执行计算器功能界面。计算器功能界面最好能使平面显示器5显示出一个总的由347代表的数字键盘来作为触摸屏255的一部分,用来直接输入所选工作参数的希望值,而不是通过用起旋钮作用的按钮来逐渐地增大或减小这个参数值。这样,用户就可以快速、容易地改变手术的数字设定,而不需连续地按下旋钮式按钮的向上或向下箭头。
如图22所示,该界面在窗口349中用一个指明了被修改工作参数(例如最大真空设定)的标记来示出通过键盘347输入的特定值。键盘347还含有:一个用来输入省缺最大值或编程最大值的按钮351、一个用来输入省缺最小值或编程最小值的按钮353、以及分别用来增大和减小此值的按钮355和357。计算器功能界面最好在脚控组件15执行手术工作时不激活。
除了手术功能界面之外,用户界面还提供代表显微手术系统功能的编程功能界面,以用于编程模式设定。在本实施例中,用户通过上述工具菜单访问编程功能界面。编程界面显示工作设定点并提供用于以下目的的工具:对一个给定的工作模式修改工作设定点,把功能从线性改变为固定或相反,对一个给定的工作模式接通或断开某些功能,等等。
根据本发明,系统1是一种基于模式的手术系统。一个模式被定义为一种手术设置,其中包含使用一个或几个具有规定初始工作参数的手术器械19。在一个特定模式中被激活的每个手术器件19都将执行一个或几个手术功能。虽然在一些共同被授权的专利中,例如在美国专利No.4,933,843、5,157,603、5,417,246和5,455,766中,术语“模式”和“功能”有时可以互换使用,但应该理解,这里对这两个术语的使用是有区别的。例如,晶状体乳化模式被定义为:有一个抽吸器件提供抽空功能,并且有一个晶状体乳化器件提供超声或晶状体乳化功能,同时这两个器件都具有规定的初始工作参数。
如上所述,计算机单元3的平面显示器5向用户显示信息。在一个优选实施例中,平面显示器5以用户可能得到的各种屏幕菜单的形式有选择地显示信息。菜单可以是表格、带标记的按钮和用户可选按键等的形式。用户通过触摸触摸屏255上的相应部分来从屏幕菜单上作出一个或几个可能的选择。其中一种显示包含一个可供选择的模式的菜单。计算机单元3的硬驱249最好以一组设置文件的形式根据预定的手术工作模式存储各工作参数。如前所述,每个模式代表一个或几个准备执行的手术处理,并通过至少一个显微手术器件19的工作来定义。每个模式都确定了在该特定模式中要使用哪些器械19以及关于这些器械的工作参数。用户最好能通过用户界面来修改或定义各种模式。
图23是说明计算机单元3为了提供根据本发明的工作模式而进行的操作的流程图。从步骤361开始,系统1在接通电源时首先对每个安装在基本单元7内的模块13进行识别和初始化。当用户在步骤363中作出初始外科医生选择时,中央处理器245将在步骤365提取对应于所选医生的特定设置文件。根据本发明的一个实施例,被提取的设置文件包括一个含有一些模式记录的模式数据库,每个模式纪录代表一种不同的模式和工作于该模式的系统1所要执行的各种手术功能的工作参数。设置文件也可以包含不属于模式记录的其他工作参数的初始值,例如声音大小或其他与模式无关的设定值。被提取的设置文件还含有一个模式序列数据库,它定义了准备提供的某些模式的序列。在步骤367中,计算机单元3把识别信息与提取的设置文件进行比较,以确认在系统1中已安装了为执行模式数据库的模式记录规定的手术功能所必须的模块13。如果确认结果不是这样,则计算机单元3将在步骤369中通过对提取的设置文件中的工作参数进行改变或取代而产生一个改变的设置文件,以使它能对应于安装在基本单元7内的实际模块13。如果在系统1中已安装了所需的模块13,或者计算机单元3已产生了改变的设置文件,则计算机单元3将在步骤371确定该设置文件是可接受的。
这样,中央处理器245从硬驱249提取一组关于在所选模式中使用的一个或几个显微手术器械19的工作参数,并且手术模块13根据从存储器提取的工作参数来控制连接在其上的显微手术器械19。
根据本发明,模式界面还定义激活各个模式的序列(顺序)。为了简化模式序列操作,屏幕菜单还含有这样一个任选项,即进入模式序列数据库所定义的序列中的下一个模式,或者返回序列中的前一模式。这使医生可以通过触摸触摸屏上的一个按钮来从一个模式进入另一个模式。在另一实施例中,医生还可以通过踏下脚控组件15上的一个特定钮或按下手持遥控器39上的一个特定钮来转变模式,在响应于用户指令时,中央处理器245相继地从硬驱249提取一组所选模式中要使用的显微手术器件19的工作参数,再从硬驱249提取关于预定序列中的下一个或前一个模式(取决于用户的指令)要使用的器械19的另一组工作参数。
例如,如果某一特定医生的设置文件的模式数据库含有几个模式的记录,则模式序列数据库可以只对其中的一些模式定义顺序。具体地说,模式序列数据库可以定义这样一个序列:模式数据库中定义的第一个模式要跟随以第三个模式,然后再相继跟随以第九个和第七个模式。换言之,模式数据库中的模式记录与模式序列数据库中列出的模式之间不一定要有一、一对应的关系。
图24以流程图的形式说明计算机单元3的模式序列操作。从步骤345开始,用户通过用户界面输入一个模式序列命令。例如,模式序列命令可以是这样的命令:进入序列中的下一个模式;返回序列中的前一个模式;或者返回最近执行的模式。在步骤377中,计算机单元3在响应该命令时将从对应于预定序列中的模式的模式数据库中识别出模式记录。在步骤377之后,计算机单元3进入步骤379,让系统1的每个模块13和周边设备进行用户所希望的模式改变。在步骤379中计算机单元3还执行某些安全性例行程序。例如,仅当脚控组件15的踏板不激活时才允许医生改变模式。对于晶状体破碎、剪刀和其他模式,允许的一个例外是,当灌注功能在提供连续的灌注时,可以在脚控组件15踏板工作的情况下选择其中一个模式。
仍参见图24,当计算机单元3在步骤381中接收到一个新的模式选择命令时,它也会进入步骤379。在步骤379之后计算机单元3于步骤383对所选工作模式中要使用的显微手术器械19的工作参数进行重新编程。在步骤385中,计算机单元3通过调整各个显示成份使平面显示器5上的显示对应于所选模式中可能得到的各种手术功能。之后,计算机单元3于步骤387激活所选工作模式中要使用的每个模块13或周边设备。
作为例子,下面的表Ⅰ列出了一些示例性的模式和关于各模式中要使用的器件19的工作参数。换言之,表Ⅰ列出了一个示例性模式数据库的各个模式记录。
对于表Ⅰ的例子,医生可以借助用户界面定义一个模式序列数据库,其中只包含9个模式中的某些模式。例如,模式序列数据库定义了这样一个序列:以模式1(打开)开始,接着是模式3(乳化-中等),然后是模式9(双,dual),最后以模式7(清洗Ⅱ)结束。
表Ⅰ工作模式数据库
| # | 模式 | 抽吸功能 | 最大真空(mmHg) | 晶状体功能 | 最大U/S(超声)功率(%) | IV柱高度(cm) |
| 1 | 打开 | 线性 | 400 | 关断 | 0 | 80 |
| 2 | 乳化-软 | 固定 | 75 | 线性 | 20 | 30 |
| 3 | 乳化-中等 | 固定 | 100 | 线性 | 30 | 35 |
| 4 | 乳化-硬 | 固定 | 125 | 线性 | 50 | 40 |
| 5 | 清洗 | 线性 | 200 | 关断 | 0 | 55 |
| 6 | 玻璃体移除 | 线性 | 300 | 关断 | 0 | 65 |
| 7 | 清洗(Ⅱ) | 线性 | 300 | 关断 | 0 | 65 |
| 8 | 乳化-高真空 | 固定 | 200 | 线性 | 20 | 50 |
| 9 | 双 | 线性 | 100 | 线性 | 30 | 50 |
如前面结合图23所说明的,计算机单元3把接通电源时以硬件数据库的形式建立的系统识别信息与提取的设置文件进行比较。这样计算机单元3就可以确认在系统1中已安装了为执行模式数据库中各个模式的希望的手术功能所必须的模块13。如果情况不是这样,计算机单元3将通过调整或更换所提取设置文件中的工作参数,使之对应于基本单元7中的实际模块13。图25和26示出一种根据本发明来调整设置文件的优选方法。
如图25所示,计算机单元3首先在步骤391中审查模式数据库中的每个模式记录。在下面将详细说明的系统1的初始化过程中,计算机单元3读出一组对应于网络上硬件(即不同的模块13和控制电路105、107)的通信参数。如前所述,网络上各个节点的每个神经元处理器225执行内设程序来控制各个显微手术器件19和周边设备。通信参数代表专用于每个处理器225的独特的识别标记,它包含关于被控器件的类型(例如玻璃体器械或超声器件)和处理器225所在模块13或周边设备的版本。识别标记还包含对于特定模块13或控制电路105、107来说是独有的专用识别符(例如流水号)。作为例子,当特定模块13的硬件或软件被更新后,它的版本就可能改变。根据本发明,模式数据库中的每一个模式记录代表着工作于该模式的系统1将提供的各种手术功能的不同工作模式和工作参数。这样,工作参数在功能和版本两个方面对应于网络上的特定节点。
在步骤393中,计算机单元3判断系统1中是否存在于模式记录所定义的工作模式中要使用的每个器械或周边设备所需类型的硬件。如果是这样,则计算机单元3在步骤395将判断关于每个模块13和周边设备控制电路105、107的版本信息是否匹配于模式记录所规定的版本信息。如果版本信息正确,则计算机单元3将返回步骤391,审查模式数据库中的下一个模式记录。另一方面,如果版本信息不正确,则计算机单元3将在步骤397判断所安装硬件的版本信息是否与模式记录规定的版本信息相兼容。如果兼容,则计算机单元3进入步骤399,用系统1实际硬件的工作参数取代模式记录中所设定的工作参数。如果两种版本不兼容,则计算机单元3将在步骤401不允许实现该特定模式。在步骤399或401之后,计算机单元3返回步骤391,审查模式数据库中的下一个模式记录。
在步骤393中,计算机单元3判断系统1中是否存在于模式记录所定义的工作模式中要使用的每个器械或周边设备的硬件。如果不存在,则计算机单元3进入图26流程图所示的步骤403。在步骤403中,计算机单元3判断为了让系统1工作于该特定模式,该不存在的硬件是否是必须的。如果不存在的硬件不是必须的,则计算机单元3将在步骤405中从模式记录中删去对该不存在硬件的引用,然后返回图25的步骤391以审查下一个模式记录。另一方面,如果该不存在的硬件是必须的,则计算机单元3将在步骤407判断是否能获得替代硬件。如果不能,则计算机单元3将在步骤409从模式数据库删去该模式记录,然后返回步骤391审查下一个模式记录。如果能获得替代硬件,则计算机单元3进入步骤411。在步骤411中,计算机单元3改变模式记录中的工作参数,使之对应于替代硬件。作为例子,系统1的某一特定设置可能含有文氏管IAV模块321但没有涡旋IAV模块323。在该情形下,如果模式记录规定了一个能提供流动抽吸功能的工作模式,该功能是文氏管IAV模块321不能提供的,则计算机单元3将以流动抽吸工作参数来替代能近似流动抽吸响应的抽空工作参数。
在步骤411之后,计算机单元3返回步骤391。在修改了设置文件的模式记录之后,计算机单元3审查所提取设置文件的模式序列数据库。如果模式序列中的一个模式不再能获得(例如已在步骤409中删去),则计算机单元3也把模式序列数据库中的该模式删去。计算机单元3就是用这样的方法修改所提取的设置文件,以用于系统1的某种特定构形。换言之,计算机单元3产生修改的设置文件。
上述表Ⅰ所列的模式记录按外科医生所执行的各种处理来定义特定的模式。例如,当医生执行打开患者眼睛的处理时将选择“打开”模式。也可能会希望系统1的工作模式按处理时所执行的各种手术功能来定义。下面的表Ⅱ和Ⅲ就是按各种手术功能列出了前部处理和后部处理时的一些示例性模式。
表Ⅱ前部工作模式
| I/A(灌注/抽吸)模式 | 晶状体模式 | 玻璃体模式 | 其他模式 |
| 灌注/抽吸 | 雕刻 | 固定切割/线性真空 | 线性凝结 |
| 眼囊清洁(Capsule Polish) | 碎片去除 | 固定切割/固定流率 | 模式序列 |
| 粘弹性体去除 | 双线性雕刻 | 线性切割/线性真空 | |
| 线性真空 | 双线性碎片去除 | 线性切割/固定流率 | |
| 线性流率 | 固定真空 | ||
| 固定流率 | 线性真空 | ||
| 固定流率 | |||
| 线性流率 |
表Ⅲ后部工作模式
| 破碎模式 | 玻璃体模式 | 剪刀模式 | 其他模式 |
| 固定真空 | 单次切割/线性真空 | 单次切割 | 线性凝结 |
| 线性真空 | 固定切割/线性真空 | 固定切割 | 模式序列 |
| 固定流率 | 固定切割/固定流率 | 线性切割 | |
| 线性流率 | 线性切割/线性真空 | 正比驱动 | |
下面的表Ⅳ-Ⅸ列出表Ⅱ和Ⅲ中所示各种模式的示例性初始工作参数。
表Ⅳa 灌注/抽吸模式的省缺工作参数
| 灌注/抽吸模式 | |||
| 参数 | 灌注/抽吸和线性真空 | 眼囊清洁 | 粘弹性体去除 |
| 真空 | 线性 | 线性 | 线性 |
| 最小真空 | 100mmHg | 1mmHg | 50mmHg |
| 最大真空 | 550mmHg | 100mmHg | 200mmHg |
| 流率 | |||
| 最小流率 | |||
| 最大流率 | |||
| 脚控开关 | 最大真空 | 最大真空 | 最大真空 |
| 脚控渐变 | 线性真空30-100%行程 | 线性真空30-100%行程 | 线性真空30-100%行程 |
表Ⅳb灌注/抽吸模式的省缺工作参数
| 灌注/抽吸模式 | ||
| 参数 | 固定流率 | 线性流率 |
| 真空 | ||
| 最小真空 | ||
| 最大真空 | 线性(25-550mmHg) | 400mmHg |
| 流动 | 固定(25cc/min(每分立方厘米)) | 线性 |
| 最小流率 | 1cc/min | |
| 最大流率 | 35cc/min | |
| 脚控开关 | 固定流率 | 最大真空 |
| 脚控渐变 | 线性最大真空,300-100%行程 | 线性流率,300-100%行程 |
| 固定流率,30%行程 | ||
下述脚控工作参数适用于各个灌注/抽吸模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
渐变——踏板行程1-100%的灌注控制
左摆(Yaw left)——回流(reflux)
右摆(Yaw right)——无
下功能(在各个灌注/抽吸模式中它们起初是不工作的)的工作参数为:
凝结功率——12%
IV柱高度——60cm(眼囊清洁模式中为40cm;粘弹性体去除模式中为50cm)
IOP——40mmHg
灯1——新
灯2——断
表Ⅴa晶状体乳化模式的省缺工作参数
| 晶状体乳化模式 | ||||
| 参数 | 雕刻 | 模式2 | 模式3 | 模式4 |
| 真空 | 固定(30mmHg) | 固定(60mmHg) | 线性 | 线性 |
| 最小真空 | 5mmHg | 30mmHg | ||
| 最大真空 | 100mmHg | 120mmHg | ||
| 流率 | ||||
| 最小流率 | ||||
| 最大流率 | ||||
| PPS(脉冲率) | 6 | 6 | 0 | 0 |
| 脚控开关 | 固定真空 | 固定真空 | 最大真空 | 最大真空 |
| 脚控渐变 | 固定真空30%行程 | 固定真空30%行程 | 线性真空30-100%行程 | 线性真空30-100%行程 |
| 线性U/S(超声),50-100%行程 | 线性U/S,500-100%行程 | |||
| 脚控右摆 | 无 | 激活/退激活PPS | 线性U/S | 线性U/S |
表Ⅴb晶状体乳化模式的省缺工作参数
| 晶状体乳化模式 | |||
| 参数 | 固定真空 | 固定流率 | 线性流率 |
| 真空 | 固定(50mmHg) | ||
| 最小真空 | |||
| 最大真空 | 30mmHg | 50mmHg | |
| 流率 | 固定(18cc/min) | 线性 | |
| 最小流率 | 1cc/min | ||
| 最大流率 | 20cc/min | ||
| PPS(每秒脉冲数) | 6 | 6 | 0 |
| 脚控开关 | 固定真空 | 固定流率 | 最大真空 |
| 脚控渐变 | 固定真空(30%行程) | 固定流率(30%行程) | 线性流率30-100%行程 |
| 线性U/S50-100% | 线性U/S50-100%行程 | ||
| 脚控右摆 | 激活/退激活PPS | PPS通/断 | 线性U/S |
下述工作参数适用于各个晶状体乳化模式:
超声功率——线性
最小超声功率——0%
最大超声功率——35%
下述脚控工作参数适用于各个晶状体乳化模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
渐变——在踏板行程1-100%中控制灌注
左摆——回流
下述各功能(在各个晶状体乳化模式中起初它们是不激活的)的工作参数为:
凝结功率——12%
IV柱高度——75cm(在模式2和4中为80cm)
IOP——40mmHg
灯1——断
灯2——断
表Ⅵa晶状体破碎模式的省缺工作参数
| 晶状体破碎模式 | ||
| 参数 | 固定真空 | 线性真空 |
| 真空 | 固定(150mmHg) | 线性 |
| 最小真空 | 5mmHg | |
| 最大真空 | 150mmHg | |
| 流率 | ||
| 最小流率 | ||
| 最大流率 | ||
| PPS | 6 | 0 |
| 脚控开关 | 固定真空 | 最大真空 |
| 脚控渐变 | 固定真空,5%行程 | 线性真空,5-100%行程 |
| 线性U/S,30-100%行程 | ||
| 脚控右摆 | 激活/退激活PPS | 线性U/S |
表Ⅵb晶状体分碎模式的省缺工作参数
| 晶状体破碎模式 | ||
| 参数 | 固定流率 | 线性流率 |
| 真空 | ||
| 最小真空 | ||
| 最大真空 | 200mmHg | 150mmHg |
| 流率 | 固定(15cc/min) | 线性 |
| 最小流率 | 1cc/min | |
| 最大流率 | 20cc/min | |
| PPS | 6 | 0 |
| 脚控开关 | 固定流率 | 最大真空 |
| 脚控渐变 | 固定流率,5%行程 | 线性流率,5-100%行程 |
| 线性U/S,30-100%行程 | ||
| 脚控右摆 | PPS通/断 | 线性U/S |
下述工作参数适用于各个晶状体破碎模式:
超声功率——线性
最小超声功率——0%
最大超声功率——25%
下述脚控工作参数适用于各个晶状体破碎模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
左摆——回流
述各功能(在各个晶状体破碎模式中开始时它们是不激活的)的工作参数为:
凝结功率——12%
IV柱高度——75cm
IOP——30mmHg
灯1——断
灯2——断
表Ⅶa玻璃体(前部)模式的省缺工作参数
| 玻璃体(前部)模式 | ||
| 固定切割 | ||
| 参数 | 线性真空 | 固定流率 |
| 真空 | 线性 | |
| 最小真空 | 0mmHg | |
| 最大真空 | 200mmHg | 线性(0-200mmHg) |
| 流率 | 固定(15cc/min) | |
| 最小流率 | ||
| 最大流率 | ||
| 切割率 | 固定(300CPM(每分钟切割次数)) | 固定(300CPM) |
| 最小切割率 | ||
| 最大切割率 | ||
| 脚控摇动开关 | 固定切割率 | 固定切割率 |
| 脚控渐变 | 线性真空,30-100%行程 | 固定流率,30%行程 |
| 线性最大真空,30-100%行程 | ||
| 脚控右摆 | 切割器通/断 | 切割器通/断 |
表Ⅶb玻璃体(前部)模式的省缺工作参数
| 玻璃体(前部)模式 | ||
| 线性切割 | ||
| 参数 | 线性真空 | 固定流率 |
| 真空 | 线性 | |
| 最小真空 | 0mmHg | |
| 最大真空 | 200mmHg | 线性(0-200mmHg) |
| 流率 | 固定(15cc/min) | |
| 最小流率 | ||
| 最大流率 | ||
| 切割率 | 线性 | 线性 |
| 最小切割率 | 30CPM | 30CPM |
| 最大切割率 | 30CPM | 300CPM |
| 脚控摇动开关 | 最大切割率 | 最大切割率 |
| 脚控渐变 | 线性真空,30-100%行程 | 固定流率,30%行程 |
| 线性最大真空30-100%行程 | ||
| 脚控右摆 | 线性切割 | 线性切割 |
下述各脚控工作参数适用于各个玻璃体(前部)模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
渐变——在踏板行程1-100%中控制灌注
左摆——回流
下述各功能(在各个玻璃体(前部)模式中开始时它们是不激活的)的工作参数为:
凝结功率——12%
IV柱高度——40cm
I0P-40mmHg
灯1——断
灯2——断
表Ⅷa玻璃体(后部)模式的省缺工作参数
| 玻璃体(后部)模式 | |||
| 固定切割 | |||
| 参数 | 单次 | 线性真空 | 固定流率 |
| 真空 | 线性 | 线性 | |
| 最小真空 | 0mmHg | 0mmHg | |
| 最大真空 | 200mmHg | 200mmHg | 线性(0-200mmHg) |
| 流率 | 固定(15cc/min) | ||
| 最小流率 | |||
| 最大流率 | |||
| 切割率 | 单次 | 固定(600CPM) | 固定(600CPM) |
| 最小切割率 | |||
| 最大切割率 | |||
| 脚控摇动开关 | 最大真空 | 固定切割率 | 固定切割率 |
| 脚控渐变 | 线性真空,5-100%行程 | 线性真空,5-100%行程 | 固定流率,5%行程 |
| 线性最大真空,5-100%行程 | |||
| 脚控右摆 | 线性切割 | 切割器通/断 | 切割器通/断 |
表Ⅷb玻璃体(后部)模式的省缺工作参数
| 玻璃体(后部)模式 | ||
| 线性切割 | ||
| 参数 | 线性真空 | 固定流率 |
| 真空 | 线性 | |
| 最小真空 | 0mmHg | |
| 最大真空 | 200mmHg | 线性(0-200mmHg) |
| 流率 | 固定(15cc/min) | |
| 最小流率 | ||
| 最大流率 | ||
| 切割率 | 线性 | 线性 |
| 最小切割率 | 30CPM | 30CPM |
| 最大切割率 | 600CPM | 600CPM |
| 脚控摇动开关 | 最大切割率 | 最大切割率 |
| 脚控渐变 | 线性真空,5-100%行程 | 固定流率,5%行程 |
| 线性最大真空,5-100%行程 | ||
| 脚控右摆 | 线性切割 | 线性切割 |
下述脚控工作参数适用于各个玻璃体(后部)模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
左摆——回流
下述各功能(在各个玻璃体(后部)模式中起始时它们是不激活的)的工作参数为:
凝结功率——12%
IV柱高度——75cm(单次切割为40cm)
IOP——30mmHg(单次切割为40mmHg)
灯1——断
灯2——断
表Ⅸa剪刀模式的省缺工作参数
| 剪刀模式 | ||
| 参数 | 单次 | 固定切割 |
| 切割率 | 单次 | 固定(60CPM) |
| 最小切割率 | ||
| 最大切割率 | ||
| 最小闭合度 | ||
| 最大闭合度 | ||
| 脚控摇动开关 | 无 | 固定切割率 |
| 脚控渐变 | 单次切割,5%行程 | 固定切割,5%行程 |
表Ⅸb剪刀模式的省缺工作参数
| 剪刀模式 | ||
| 参数 | 线性切割 | 比例切割 |
| 切割率 | 线性 | 正比 |
| 最小切割率 | 0CPM | |
| 最大切割率 | 100CPM | |
| 最小闭合度 | 1% | |
| 最大闭合度 | 100% | |
| 脚控摇动开关 | 最大切割率 | 最大激励 |
| 脚控渐变 | 线性切割,5-100%行程 | 正比,5-100%行程 |
下述脚控工作参数适用于各个剪刀模式:
凝结开关——控制凝结通/断
可编程功能开关——无作用
左摆——无
右摆——无
下述各功能(在各个剪刀模式中起初它们是不激活的)的工作参数如下:
凝结功率——12%
IV柱高度——75cm
IOP——30mmHg
灯1——断
灯2——断
一般,对于表Ⅱ-Ⅸ中所示的各种基于功能的模式,用户从最高级的用户选择键415中选出上述各种预定模式中的一个模式,图27示出关于前部处理的选择键415的一个例子。键415最好位于触摸屏255的底部。由于在同一时刻只能激活一个模式,所以当用户选出一个用户选择键时计算机单元3将自动取消当时的工作模式。在模式选择的一个例子中,用户通过触摸晶状体模式键417来请求可得到的晶状体乳化模式。现在参见图28和29,当用户触摸晶状体模式用户选择键417时,起初平面显示器5只显示出前4个模式(即雕刻、碎片去除、雕刻(双)和碎片去除(双))。在响应于用户对带有箭头符号的键419的触摸时,计算机单元3将在平面显示器5上产生一个关于可得到的晶状体模式的附加菜单(即固定真空、线性真空、固定流率、和线性流率)。例如,用户通过触摸键421而从该菜单选择了线性真空晶状体模式。图30示出线性真空晶状体模式下的一个示例性屏幕显示。如图所示,在该模式中可以得到和激活真空、超声(即晶状体乳化)、和凝结等功能。
如上所述,为了按照显微手术系统的各种工作模式工作,计算机单元3首先识别和初始化网络上的每个节点(即,安装在基本单元7内的各个模块13以及脚控组件15和IV柱组件17各自的控制电路105和107)。在一个优选实施例中,计算机单元3的中央处理器245执行构成了一个系统机器的软件,该系统机器有三个工作部件:通电时的初始化、网络管理、和网络连系。系统机器的初始化部件生成和起动网络。网络管理部件为网络上的各模块13提供各网络变量的结合和分离以实现用户选择的模式,监视模块13的功能性,并处理来自网络的输入信息。网络连系部件处理构形文件和模式改变,并让用户界面显示出发生的改变和错误。
图31说明当系统1通电时,计算机单元3在执行系统机器的初始化部件时的操作。总的来说,系统机器识别网络上的每个节点,并为每个节点的含有用户界面访问该节点时所使用的当地网络变量的神经元处理器225生成一个编程目标。从步骤427开始,系统机器初始化存储在计算机单元3硬驱249中的网络数据库。如前所述,网络上各节点的每个神经元处理器225都执行用来控制各个显微手术器械19和周边设备的内设程序,通信参数代表专用于每个处理器225的独特识别标记,它包含关于被控制器件的类型(例如玻璃体器械或超声器件)的信息以及关于处理器225所在的模块13或周边设备的版本的信息。识别标记还含有一个对特定模块13或控制电路105、107来说是独有的专用识别符(例如流水号)。作为例子,当特定模块13的硬件或者软件被更新时它的版本就可能改变。网络数据库包含了以前安装的各个节点,其形式的特定模块13或控制电路105、107的识别符,对应于各种器件类型的节点的名称、以及对应于这些节点的各个程序的名称。换言之,网络数据库含有关于一个系统的信息,该系统含有每个已安装在网络上的可访问的不同类型的模块13和周边设备。
在步骤429,系统机器读出一组对应于实际存在于网络的硬件(即各个模块13和控制电器105、107)的通信参数,并在软件中生成一个节点目标次供对特定模块13或周边设备的访问。进到步骤431,系统机器从已在网络数据库中安装了一个节点的第一个模块13或周边设备控制电路105、107开始,于步骤433在软件中生成一个器件目标来代表这个节点。系统机器最好从能对该硬件提供访问的节点目标来驱动器件目标。如果系统机器在步骤435中判定,在网络数据库中还对其它模块13或周边设备控制电路105、107安装了节点,则它将返回步骤431,对下一个模块13或周边设备控制电路105、107进行处理。系统机器就是用这种方法对已被安装在网络数据库中的硬件生成器件目标。这些由系统机器生成的器件目标含有用户界面访问这些节点时要使用的当地网络变量。
在生成了器件目标来代表已安装在网络数据库中的节点之后,系统机器进入步骤437,审查存在于网络上的各个模块13或周边设备控制电路105、107,以便与以前安装的节点比较。进入步骤439,系统机器判断是否有一个已安装在网络数据库中的节点(它不再出现在网络上)对应于同样类型的被审查模块13或周边设备控制电路105、107。如果有这样的节点,则系统机器将在步骤441中用该特定模块13或周边设备控制电路105、107的通信参数来替换以前安装的节点的通信参数。在执行替换操作时,所有网络变量结合都被转移给新的节点。而且,网络数据库以及网络变量结合所涉及的其他节点都不需改变。另一方面,如果有一个还未被安装在网络数据库中的节点对应着同样类型的被审查模块13或周边设备控制电路105、107,则系统机器将进至步骤443。在步骤443中,系统机器用新模块13或周边设备控制电路105、107的通信参数安装一个新节点,并生成一个器件目标来代表这个新节点,在步骤441或443之后,系统机器进入步骤445,判断网络上是否存在还没有在网络数据库中安装节点的其他模块13或周边设备控制电路105、107。如果有这样的硬件,则系统机器返回步骤437。否则系统机器将进至步骤447。
在步骤447,系统机器删去所有其硬件不出现在网络上的安装在网络数据库中的其余节点。进至步骤449,当发生网络上出现多于一个的相同类型模块13或周边设备控制电路105、107的情况时,系统机器将使每种类型的第一个器件目标激活。换言之,系统机器给多个或重复的模块13或周边设备控制电路105、107中的一个以优先权。
这样,如果自从前一次接通电源以来,向系统结构添加了一个新模块13,则不论它与以前安装的模块13是否有相同的类型,系统1都将自动地探测到和初始化该新模块13,并对通信参数和用户界面进行重新构形。这样做之后,用户就能访问新模块13和控制连接在其上的任何手术器械19。类似地,如果自从前一次接通电源以来从网络中除去了某个特定模块13,则系统1将自动地探测到该模块13的不存在,并删去所有相关的通信参数和用户界面功能。此外,计算机单元3在执行自动网络重新构形时允许多于一个相同类型的模块13被安装在系统1中。计算机单元3将确定通过用户界面进行识别和控制时所需的高级和次级优先权。计算机单元3还确定不允许的系统构形,并通过用户界面教导用户采取适当的行动。
计算机单元3在接通电源时就是用这样方法,通过构形神经元处理器225和生成供用户界面访问网络时使用的必要的当地网络变量,确认系统1能满足某种最低工作要求,以及执行所有的恒定网络结合,来初始化系统1的。计算机单元3还通知用户界面关于上次构形以来的所有构形改变,包括向/从系统1添加/除去模块13或周边设备。在通电初始化之后,系统1的控制被传给用户界面。在另一个实施例中,计算机单元3还在通电时识别特定模块13在基本单元7中的位置。
现在参见图21示例性系统构形中所示的各个单个部件,每个安装在基本单元7中的模块13都控制一个或几个能提供几个不同手术功能的显微手术器械19。例如,模块13包括文氏管IAV模块321、涡旋IAV模块323、晶状体模块325、剪刀模块327、凝结模块329和照明模块331(也请参考图4A-4D的照明模块13A)。系统1还包括作为周边设备连接在系统1网络上的脚控组件15和IV柱组件17。
图32以方框图形式示出了文氏管IAV模块(详细示于图43-60)。如图32所示,模块321有一个通过网络连接器171与网络相连的神经元电路455,其中连接器171位于与底板101相连的模块321的后部。神经元电路455含有一个RS485发接收机223,用来通过数据通信总线接收和发送数据。与发送接收机223相连的神经元处理器225为模块321提供网络通信控制。神经元处理器225还执行一些内设应用程序,以控制系统1的灌注、抽吸和玻璃体功能。在本例中,神往元电路455含有一个存储器457(例如一个闪速EEPROM),用来存储IAV模块321的应用程序。此外,存储器457还存储用于在网络上初始化模块321的构形和识别数据。中央处理器245最好能在响应于用户所提供的信息时通过数据通信总线来重新编程存储器457。神经元电路455还含有一个时钟电路459(例如一个晶体振荡器),用来为神经元225的工作提供时间基准。文氏管IAV模块321还含有:一个状态LED461,例如位于模块321前面板上的一个绿色LED,用来指明该模块已激活;以及一个稳压电路463,以产生-5V的电源供电路使用。虽然在图32中没有示出,但神经元电路455还含有另一个RS485发送接收机,用来从计算机单元3接收复原信号。
一般,如果需要的处理能力大于处理器225能提供的能力,则神经元处理器225可以与协处理器结合使用。在这种情形中,特定的模块13可以含有一个协处理器,它能接收和响应神经元处理器225所产生的控制信号,以产生附加的控制信号来在执行手术处理过程中提供闭环控制。在本发明的一个优选实施例中,IAV模块321含有一个与例如具一个电可编程逻辑器件(EPLD)467的可编程逻辑电路协同工作的协处理器电路465。协处理器电路465最好含有:一个协处理器469(例如Intel386EX处理器)和一个相关的存储器471(例如一个闪速EEPROM和一个静态RAM(随机访问存储器));一个时钟电路473(例如一个晶体振荡器),用来提供协处理器电路465所使用的时钟信号;以及一个监守计时器475。
再参见图32,协处理器电路465的协处理器469根据抽吸水平工作参数产生一个抽吸控制信号,并把它提供给一个数模(D/A)转换器483。在所示的实施例中,D/A转换器483提供一个并行接口,协处理器469通过该接口控制流经模块文氏管泵的空气流。一个抽吸驱动器485接收D/A转换器的模拟输出,并据此驱动一个抽吸伺服阀487。抽吸伺服阀487的打开和关闭确定了流经文氏管的空气流,从而确定了真空度。文氏管IAV模块最好能支持由位于模块内的文氏管泵驱动的单个抽吸口的工作。文氏管泵需要压力例如在80至100磅每平方英寸范围内的气体/空气输入。模块321还含有一个压力释放阀(未示出),以防止过压力情况。模块321的控制电路最好既能提供抽吸真空度的固定控制,又能提供其线性控制。例如,抽吸真空度的范围可以从0mmHg到550mmHg,并可以1mmHg的增量改变。用户借助于触摸屏255、遥控器39、或脚控组件15设定全部抽吸参数,并借助于脚控组件15控制抽吸功能。
文氏管IAV模块321的灌注部分支持重力输送灌注。例如,Ⅳ柱组件17支持一袋医生在手术中灌注患者眼睛时使用的消毒盐水。模块321含有一组螺线管阀493,其中一个是夹阀(pinch valot)495,当它关闭时可防止所有液体进入系统1。触摸屏255和脚控组件15都能向用户提供对文氏管IAV模块321灌注功能的固定控制和通/断(开/关)控制。神经元处理器225与协处理器469和EPLD467的一个控制寄存器496协同工作,产生控制一组螺线管驱动器497的驱动信号。然后,螺线管驱动器497使螺线管阀493打开(或关闭)指定的量。
IAV模块321最好含有一组气压传感器501,以提供关于实际抽吸或灌注压力的反馈。例如,一个抽吸传感器503探测抽吸压力大小,一个管压传感器505探测灌注压力大小。与管压传感器505相连的一个仪器放大电路507在压力信号被处理之前先将它放大。抽吸传感器最好含有一个内部放大器。一个模数(A/D)转换器511接收放大后的压力信号并把模拟压力信号转换成数字值,以供协处理器电路465处理。这样,IAV模块321提供了对抽吸和灌注功能的闭环控制。
如共同拥有的美国专利No.4,773,897所示出和说明的,眼科显微手术系统典型地采用一种带有一个可卸的集液盒的真空操作抽吸系统。通过把抽吸器械连接到处于真空或负压力的集液盒上,抽吸的液体便被抽吸到盒内。进行眼外科显微手术处理的医生例如可以用脚控组件15来控制抽吸系统,该脚控组件使医生可以精密地控制抽吸力,其具体途径是通过驱动一个例如上述专利中以代号182表示的螺线管楔形活塞或图32所示的抽吸伺服阀487,来阻塞或打开集液盒对显微手术器械的抽吸力。
模块321的螺线管493还含有一个抓盒阀515和一个夹盒阀517。抓盒阀515的活塞(未示出)把集液盒定位在模块321上。夹盒阀517在抽吸功能不激活时把抽吸管夹死,以防液体从集液盒或抽吸管回流到患者眼中。
此外,文氏管IAV模块321中的一个螺线管493是回流螺线管阀519,用来驱动一个回流活塞,如上述专利中的184所示。回流活塞被驱动时将挤压与集液盒相连的一个回流室,迫使抽吸管中的少量液体退出管道,以保证管道畅通不受阻塞。随着所进行处理的不同,所需的回流量也不同,例如,进行前部或后部处理时的回流量是不同的。重要的是,后部处理所用的盒子比前部处理所用的盒子要提供少得多的回流量。系统1的一个有益特征是能自动地探测和区分后部(或微回流)回流盒和前部回流盒。该特征防止了用户在处理前误装和误使用错误的回流盒。
根据本发明,如果给准备用于后部处理的IAV模块321插入了设计用于前部处理的盒子,则用户界面将以可视和/或可听的形式指出这一错误,防止系统1在安装了不正确盒子的情况下被激活。
为了识别将被使用于某种处理的相应盒子,每个盒子都带有一种特定的颜色。每个盒子所带的颜色载体是一个可连元件或插片,如上述专利中的150所示。它一般具有I形,以摩擦力固定在盒子的一个凹口中,如上述专利中的130所示。这些可卸的颜色载体,例如一个黄色的和一个蓝色的,可以容易地装到盒子上和从盒子上取走,这些盒子在其他方面可能完全相同。当一个盒子被插入到模块321中时,颜色载体将位在一个能产生表明盒子存在的信号的盒子存在探测器525的邻近。盒子存在探测器525最好用一个光电颜色探侧器,例如光电电路中的一个红外光源来实现,该探测器例如是美国弗罗里达州坦帕市Tri-Tronics CO.Inc.以型号F4出售的探测器。黄色将反射红外光而蓝色将吸收红外光,从而能区分出对应于两种不同特定处理的两个盒子。于是,盒子存在探侧器根据颜色载体的颜色探测盒子的存在。图61示出一个优选电路,它能接收盒子存在探测器525所产生的信号,并传送给计算机单元3。如果盒子颜色不对应于医生所选的特定处理,则将有一个可听和/或可视的信号通过用户界面向用户指明这一情况。同时,计算机单元3在响应于这一信息时,将在用户安装上了正确的盒子之前不允许进行任何眼科处理。在图32的实施例中,盒子存在探测器525首先通过向EPLD467的状态寄存器527提供一个信号来给计算机单元3提供信号,以通知用户安装了不正确的盒子。接着,EPLD467和协处理器电器465向神经元电路455提供信号,以传回计算机单元3。
除了关于特定的抽吸率和灌注率的反馈之外,模块321还含有盒子液面探测器529,以产生一个接近全满信号和一个全满信号,并通过用户界面告诉用户必须更换集液盒。
通过用户界面用户可以得到一种准备功能,该功能使用户能通过打开和关闭灌注夹阈495和除去抽吸管中的空气来准备手术器械。该功能还允许用户通过选择“退盒”任选项而取出抽吸集液盒。
如前所述,文氏管IAV模块321也支持系统1的玻璃体功能。在一个优选实施例中,文氏管IAV模块321含有一个用来连接玻璃体切割器的端口。模块321最好能把玻璃体切割器控制得有三种切割动作:线性切割率、固定切割率、和单次切割。线性切割率的范围最好是每分钟30到750次切割(30-750CPM),并可以每分钟一次的增量改变。用户借助于触摸屏255、遥控器39、或脚控组件15来设定切割率,并用脚控组件15来控制切割率。用户也可以设定固定的切割率以提供每分钟30到750次切割,设定值的增量也是每分钟一次。在本例中,用户借助于触摸屏255、遥控器39、或脚控组件15设定固定切割率,并用脚控组件15改变固定切割率。单次切割由固定的、通/断控制提供。每次激活单次切割时,玻璃体切割器将闭合/打开一次。用户借助于触摸屏255、遥控器39、或脚控组件15选择单次切割,并用脚控组件15激活切割。连接在文氏管IAV模块321上的玻璃体切割器由驱动文氏管泵的外部空气/气体输入来驱动。
如图32所示,EPLD467最好含有一个玻璃体计时器533,用来执行设定玻璃体切割器的切割率所需的计时功能。螺线管驱动器497根据来自玻璃体计时器533的计时信号来驱动一个玻璃体螺线管535,还进行对玻璃体切割的控制。
系统1最好含有一个涡旋IAV模块323,它或者与IAV模块并存,或者取代后者,涡旋IAV模块323虽然与文氏管IAV模块相似,但它不是利用文氏管泵,而是利用涡旋泵(未示出)来提供灌注和抽吸功能。根据本发明,涡旋IAV模块323的涡旋泵可以起到文氏管抽吸系统(即真空度控制)的作用,或者起到涡旋抽吸系统(即流量控制)的作用。
在本例中,模块323与一个一次性涡旋盒共同工作,后者含有一个涡旋泵,用于控制灌注、抽吸、通风和标定的夹阀开口,一个传感器膜、和一个集液池。涡旋盒还在盒壳前部有灌注管、抽吸管、和集液池。用户把涡旋盒安装在一个位于模块323前部的可拉开的抽屉中。安装之后,可以借助于触摸屏255使涡旋盒与模块323的驱动器和控制系统连接或脱离。换言之,通过对触摸屏255上的一个条目发出指令,涡旋IAV模块323将纳入或连接涡旋盒,或者释放或脱离涡旋盒。
涡旋IAV模块323的抽吸部分驱动一个抽吸端口,提供抽吸的真空度或流率控制。有利的设计是,真空抽吸功能提供0mmHg至550mmHg之间的以1mmHg为增量的真空度,流率抽吸功能提供1cc/min至60cc/min之间的以1cc/min为增量的流率。用户借助于触摸屏255、遥控器39、或脚控组件15设定抽吸工作参数,并用脚控组件15改变这些参数。
涡旋IAV模块323也支持类似于文氏管IAV模块321的重力输送灌注,虽然它不像后者那样带有夹阀495。涡旋IAV模块323是通过与模块323内的一个螺线管活塞相结合的一次性涡旋盒来提供灌注控制的。与模块321类似,用户借助于触摸屏255或脚控组件15对涡旋IAV模块323的灌注功能进行固定的通/断(打开/关闭)控制。
与文氏管IAV模块321类似,涡旋IAV模块323也能支持系统1的玻璃体功能。不过,模块323利用其内部的一个气泵而不是文氏管IAV模块321的外部空气/气体输入来驱动连接在模块323上的玻璃体切割器。
图147和148以原理图的形式示出一个用于涡旋IAV模块323的优选的压力探测电路。
现在转到图33,晶状体乳化和破碎模块(晶状体模块)325(详细示于图26A-26T)是一个自足模块,它能向晶状体模块输出端口537处的5000欧姆阻抗提供例如频率为29±2KHZ的高达35W的晶状体功率,晶状体乳化和/或破碎器械539即连接在该端口537上。在一个优选实施例中,晶状体模块325既支持线性工作又支持脉冲工作。线性晶状体功能提供连续的晶状体功率,用户可以在最大值的0%至100%范围内以1%的增量对该功率编程。医生通过踏下脚控组件15的中间踏板来把线性晶状体输出激活为编程晶状体功率的最小值,然后利用线性踏板的行程来增大该功率,直到编程功率的最大值。在本例中,线性晶状体功率从零开始以固定的斜率增大。用户最好借助于触摸屏255、遥控器39、或脚控组件15来设定输出大小,并用脚控组件15控制线性晶状体功能。与线性工作相反,脉冲晶状体功能以预先编程的有限时间长度提供晶状体功率(例如为周期性的)。模块325向用户提供固定的通/断功率控制,该功率可被用户以最大值的1%为增量设定在1%至100%之间。然后用户可以编程脉冲输出控制,以提供每秒1个至20个脉冲,其间的增量为每秒1个脉冲。用户利用触摸屏255设定输出功率大小和脉冲率,并利用脚控组件15对它们进行控制。
在一个优选实施例中,晶状体模块325含有一个神经元电路541,它通过一个位在连接于底板101的模块325的后部的网络连接器171,连接在网络上。神经元电路541含有一个用来通过数据通信总线接收和发送数据的RS485发送接收机223。连接在发送接收机223上的神经元处理器225提供模块325的网络通信控制。神经元处理器225还执行存储在一个存储器543(例如一个闪速EEPROM)中的内设应用程序,以控制系统1的晶状体乳化和破碎功能。存储器543还存储了用来在网络上对模块325初始化的构形数据和识别数据。中央处理器254最好能在响应于用户提供的信息时通过数据通信总线对存储器543重新编程。神经元电路541还含有一个时钟电路545(例如一个晶体振荡器),以提供神经元225工作的时间基准。与IAV模块321相似,晶状体模块325也有一个稳压电源电路546,以提供电路所使用的±5V和4V电源。虽然图33中没有示出,但神经元电路541还含有另一个RS485发送接收机和一个状态LED,前者用来从计算机单元3接收复原信号,后者用来指明模块325已被激活。
如图33所示,晶状体模块325还含有一个与EPLD549协同工作的协处理器电路547。协处理器电路547最好包含:一个协处理器551(例如Intel 386EX处理器)和相关的存储器553(例如一个闪速EEPROM和一个静态RAM),一个时钟电路555(例如晶体振荡器),和一个监守计时器557。EPLD549有一个脉冲计时器559,用来提供频率发生器561(例如正弦波发生器)所使用的时钟信号。协处理器电路545的协处理器551与EPLD547协同工作,向频率发生器561提供控制信号,以为脉冲晶状体的输出产生一个可编程的频率。一个晶状体驱动电路563利用频率发生器561所产生的可编程频率来驱动晶状体输出537。晶状体模块325最好含有一个升压稳压器565,以把提供给晶状体驱动器563的基准电压保持在一个大于被指定的晶状体电压,例如3V,上。这可以防止晶状体驱动器563过份的功耗。晶状体模块325还含有一个监视器电路567,它不仅用于监视升高的电压,还用于监视晶状体功率。为了得到最佳的晶状体功能,希望即使当器械539的载荷改变时电流和电压的相位也可保持在该器械的共振频率上。监视器电路567还有一个过电流探测器,以防止晶状体模块325中出现过电流情况。
根据有发明,晶状储模块325还含有一个探头存在电路571,用来探测是否存在连接在晶状体输出端537上的器械539。协处理器电路547和EPLD549把探头存在电路的输出与监视电路567的切断信号相结合,以驱动一个继电器控制器575。然后,当出现不希望的工作情况时继电器控制器575将使晶状体驱动器563不工作。
参见图34,剪刀模块327(详细示于图89-103)最好不仅向系统1提供剪刀功能,而且还提供空气/液体交换功能和镊子功能。在一个优选实施例中,模块327支持一个电驱动端口579,模块327将根据用户所选的工作模式和工作参数去控制连接在该端口579上的剪刀/镊子器械。
剪刀模块327最好能以线性切割率、固定切割率、单次驱动和比例驱动来提供剪刀/镊子功能。例如,用户可以借助于触摸屏255或脚控组件15来把剪刀模块327编程得能以每分钟一次切割的增量提供每分钟30至300次切割的线性切割率。在本例中,医生用脚控组件15控制实际的切割率。用户也可以借助于触摸屏255或脚控组件15把模块327编程得能提供每分钟30至300次切割之间的增量为每分钟1次切割的固定切割率,并用脚控组件15提供通/断控制。与编程其他工作参数相同,用户也可以把模块327编程得能提供单次切割,或者一次剪刀/镊子循环。医生最好用脚控组件15激励单次切割。比例驱动功能是控制剪刀器械的闭合程度为某一百分比。例如,用户可以把模块327编程得能提供闭合度从0%至100%,闭合度增量为25%的比例驱动,这里触摸屏255和脚控组件15将给用户提供线性控制。
与其他的模块13相同,剪刀模块327也有一个通过网络连接器171连接在网络上的神经元电路583,该连接器171位在连接于底板101的模块327的后部。神经元电路583含有一个RS485发送接收机223,用来通过连接在神经元处理器225上的数据通信总线接收和发送数据。除了网络通信控制之外,神经元处理器225还执行存储在一个存储器585(例如闪速EEPROM)中的内设应用程序,以控制系统1的剪刀/镊子功能和空气/液体交换功能。存储器585还存储了在网络上对模块327初始化时所用的构形和识别数据。中央处理器245最好能在响应于用户提供的信息时通过数据通信总线对存储器585进行重新编程。神经元电路583还含有一个监守计时器电路587和一个时钟电路589。虽然图34中没有示出,但神经元电路585还含有另一个RS485发送接收机,用来从计算机单元3接收复原信号。
与其他一些模块13相同,剪刀模块327也含有一个EPLD595,它配合神经元电路585的神经元处理器225使用,以根据用户输入的工作参数来控制剪刀/镊子器械。具体地说,EPLD595是一个驱动器选择器,以选择螺线管驱动器597或者直流电机驱动器去驱动器械端口579。这样,剪刀模块327能够驱动两种类型的剪刀器械。
如图34所示,剪刀模块327还含有气动控制器605,以提供空气/液体交换功能。例如,气动控制器驱动三个螺线管阀门,以控制IOP的充气、排气和保持。模块327的空气/液体交换部分最好能支持一个由作为气动控制器605的一部分的气泵所驱动的空气端口(未示出)。例如,该气泵可支持流率高达每小时5标准立方英尺时的以1mmHg为增量的高达100mmHg的空气压力。用户借助于触摸屏255或脚控组件15来控制空气/液体交换端口。图34还示出一个IOP探测器607(例如压力传感器),用来提供对神经元电路583的反馈。用户界面在响应于IOP探测器607探测到过压力或压力不足的情况时,将提供一个声响告警。剪刀模块327还含有一个状态LED611,例如模块327前面板上的一个绿色LED,以指明该模块已激活;还有一个器械探测器电路613,用来探测是否存在一个连接在端口579上的剪刀器械。虽然图34中未示出,但神经元电路还有另一个RS485发送接收机,用来从计算机单元3接收复原信号。
为了对付出现电源丢失或模块故障的情况,模块327配备有一个储气器和关断阀门,以给用户适当的时间去处理故障情况。
如图35所示,双极凝结模块329(详细示于图104-113)是一个自足模块,它支持一个双极输出端口625。在一个优选实施例中,双极输出能给100欧姆阻抗提供高达7.5W的双极功率。模块329最好能控制该输出端口可以提供固定双极功能或者线性双极功能。用户可以把双极凝结模块329编程得能提供最大双极功率的2%至100%的固定双极功率,增量为1%。最好利用脚控组件15上的一个瞬间接触开关(按钮)把双极输出激励到被编程的输出功率上。只要保持下压该按钮,双极输出就一直被激励着。用户借助于触摸屏255、遥控器39,或脚控组件15设定输出功率,并利用脚控组件15上的一个按钮改变设定值。用户可以把模块329编程得能提供最大值的2%到100%之间的线性双极功率,并可以1%的增量改变该功率。当医生踏下脚控组件15的中间踏板时双极输出最好被激励到最小的编程输出功率上,然后根据线性踏板的行程逐渐增大到编程输出功率的最大值。用户借助于触摸屏255,遥控器39、或脚控组件15设定输出功率,并用脚控组件15控制功率大小。
与其他模块13相同,凝结模块329也有一个通过网络连接器171连接在网络上的神经元电路627,该连接器171位在连接于底板101的模块329的后部。神经元电路627含有一个RS485发送接收机223,用来通过数据通信总线接收和发送数据。与发送接收机223相连接的神经元处理器225提供模块329的网络通信控制。神经元处理器225还执行一个内设的应用程序,以控制系统1的双极凝结功能。在本例中,神经元电路627含有一个存储器629(例如闪速EEPROM),用来存储凝结模块329的应用程序。此外,存储器629还存储在网络上对模块329初始化时所使用的构形和识别数据。中央处理器245最好能在响应于用户提供的信息时通过数据通信总线对存储器629进行重新编程。神经元电路627还含有一个时钟电路631(例如晶体振荡器),以为神经元225的工作提供时间基准。虽然图35中没有示出,但神经元电路627还有另一个RS485发送接收机,用来从计算机单元3接收复原信号。
凝结模块329还含有一个EPLD635,它与神经元电路627的神经元处理器225协同工作,以根据用户输入的工作参数来控制双极凝结器件。具体地说,EPLD635含有:一个控制逻辑电路637,用来产生一个激活信号去激活凝结;一个动作监视器639,用来监视双极输出电压和输出动作(固定输出还是线性输出);以及一个双极计时器641,用来产生脉宽调制频率。
双极凝结模块329还含有一个过电压探测器645,用来在过电压输出或不合要求输出情况下切断对双极输出端625的供电。过电压探测器645最好也能通过神经元处理器225和发送接收机223与网络通信,以向用户给出关于不正常输出情况的告警信号。
根据本发明,神经元电路627的神经元处理器225与EPLD635联合以适当的相位序列去激活一组预驱动器649,然后由一组功率驱动器651给双极输出端625提供功率。在一个实施例中,凝结模块329还含有一个隔离和阻抗匹配网络653,以调整功率驱动器651输出的状态。
图35还示出了一个状态LED675,如前所述,它最好是一个位于模块329前面板上的绿色LED,用来向用户指明凝结模块329已激活。模块329还含有电源保险丝和滤波电路659,用来防止过电流情况和减小噪声。
现在参见图36,照明模块331(详细示于图114-125)是一个自足模块,它至少含有例如第一灯665和第二灯667两个灯,用来向位于模块331前部的相应照明端口提供光照。根据本发明,用户把一个光纤照明器械,例如一个内窥照明器,连接在一个或两个端口上,供医生在手术中照明患者眼球的后部使用。虽然模块331对灯665和667提供给两个端口的光进行了分别的控制,但如果需要两个灯可以同时使用。此外,模块331对提供在两个端口上的光强给出了独立的控制。用户可以借助于触摸屏255或遥控器39选择高(100%)、中(75%)、低(50%)三种输出照明。
在一个优选实施例中,照明模块331含有一个通过一个网络连接器171连接在网络上的神经元电路671,连接器171位在连接于底板101的模块331的后部。神经元电路671含有一个RS485发送接收机223和一个神经元处理器225。神经元处理器225执行网络通信控制和用于控制系统1的照明功能的应用程序。在本例中,神经元电路671含有一个存储器673(例如闪速EEPROM),用来存储照明模块331的应用程序。此外,存储器673还存储在网络上对模块331初始化时所使用的构形和识别数据。中央处理器245最好能在响应于用户提供的信息时通过数据通信总线对存储器673进行重新编程。神经元电路671还含有一个时钟电路(例如晶体振荡器),以提供神经元电路671所用的时钟信号;电路671还有一个监守计时器676。虽然图36中未示出,但神经元电路671还有另一个RS485发送接收机,用来从计算机单元3接收复原信号。
如图36所示,神经元电路671的神经元处理器225分别向灯665的第一电源继电器677和灯667的第二电源继电器679提供通/断信号。然后继电器677、679中的一个或两个将把一个12V电源681(由电源模块103通过底板101提供)分别连接到第一灯驱动器电路683和/或第二灯驱动器电路685上,以点亮灯665和667中的一个或两个。在一个优选实施例中,灯驱动器683、685向神经元电路671提供关于灯665和667的状态的反馈。
为了改变灯665所提供的光强,照明模块331的神经元电路671首先向一个数模(D/A)转换器689提供代表所需光强的串行数据。一个制光驱动器电路691在响应于D/A转换器689的输出时将驱动一个制光电路693。根据本发明,制光电路693调节灯665的光强。这样,制光驱动器691根据输入给D/A转换器689的串行数据来控制制光电路693,从而把灯665的光强设定在希望值上。类似地,神经元电路671也通过向数模(D/A)转换器697提供代表所需光强的串行数据,来改变灯667所提供的光强。然后D/A转换器697给制光驱动器电路699提供一个模拟强度信号,使后者根据输入给D/A转换器697的串行数据去控制一个制光电路701,从而改变灯667的光强。
再次参见图36,照明模块331还含有一个状态LED705,例如一个位于模块331前面的绿色LED,用来指明模块331已被激活。模块331还提供一个冷却系统707,例如一个风扇,它能响应于神经元电路671的神经元处理器225的指令而工作,以消散模块331内可能会损坏其元部件的多余热量。
在本发明的一个优选实施例中,系统1还支持下述一些可供选择的周边设备:遥控脚控组件15;带有自动IV柱组件17的仪器小车21;扩展基本单元207;和手持式红外遥控单元39。
这些周边设备之一,即脚控组件15,给外科医生在执行手术处理时提供至少对一个显微手术器械19的遥控。虽然用户可能是一位外科医生,但通常是由手术室内的护士或其他人员直接向系统1的用户界面提供输入。所以,脚控组件15提供了外科医生与显微手术系统1之间的主要界面。有益的设计是,外科医生能够通过脚控组件15来控制系统1提供的多个功能和改变工作模式。
图37示出根据本发明一个优选实施例的用于控制脚控组件15的控制电路105。脚控电路105(详细示于图126-136)最好能提供网络通信和根据至少一个工作参数去控制脚控组件15的工作。
虽然脚控电路105不安装在基本单元7内,但它也含有一个带有用来通过数据通信总线接收和发送数据的RS485发送接收机223的神经元电路717。连接在发送接收机223上的神经元处理器225提供脚控电路105的网络通信控制。所以对于计算机网络来说,当脚控组件15被脚控电路105控制时,它的作用与模块13等价。换言之,脚控电路105也连接在数据通信总线上,后者在用户界面与脚控电路105之间提供代表工作参数的数据的通信。这样,数据通信总线也提供脚控电路105与手术模块13之间的对等通信。此外,脚控电路105对外科医生通过脚控组件15发出的指令作出响应,以通过网络来改变显微手术器械19的工作参数。
在本例中,神经元电路717的发送接收机223通过一条数据电缆(未示出)连接到数据通信总线上,该电缆与底板101背面的连接器157相连。在另一个实施例中,IV柱组件17提供一个与脚控电路105相连接的跳接器。一个电源输入端721向脚控电路105提供电源,一个稳压器,例如一个VCC发生器723,向该电路提供必要的逻辑电压。图37还示出一个连接在一个磁粉制动器(magneticparticle brake)727上的制动驱动电路725,用来提供踏板行程的渐变分档。
神经元电路717还含有一个存储器731(例如闪速EEPROM),用来存储脚控电路105的应用程序。在本例中,神经元处理器225与一个EPLD735协同工作,执行控制脚控组件15的应用程序。此外,存储器731还存储了在网络上对脚控电路105初始化时所使用的构形和识别数据。还有,与模块13的情形相同,中央处理器245也能在响应于用户提供的信息时通过数据通信总线对存储器731进行重新编程。如图37所示,神经元电路717还含有另一个RS485发送接收机739,用来从计算机单元3接收复原信号。
在一个优选实施例中,脚控组件15包括一个中间踏板、一个摇动开关(rocker switch)、和两个分开的按钮开关(见图231)。中间踏板的渐变分档运动和摆动运动最好能向系统1提供双线性和通/断控制。其中每个控制在功能和控制参数(例如范围、模式等)方面都是完全可以编程的。根据本发明,EPLD735通过一个分档编码器745和一个摆动编码器747接收来自各个开关743的信息和关于中间踏板行程的信息。根据本发明,EPLD735提供开关解码,正交解破/相乘、和制动强度解码。内于神经元处理器225的输入端数目有限,所以EPLD735提供对开头743给出的开关信号的解码。此外,分档和摆动编码器745、747各自提供两个正交的信号来代表踏板行程的多少和方向。EPLD735解码这些信号,供神经元电路717的神经元处理器225使用。还有,EPLD735对神经元225产生的制动强度信号编码,供制动驱动电路725使用。
作为一个例子,脚控组件15的中间踏板提供渐变方向或垂直方向上的约15°的上下运动。在这个运动范围内,用户可以编制两个分档位置。此外,当中间踏板经过任何一个分档位置时,踏板的阻力将有变化,以给医生提供战术反馈(tacticle feedback)。只要中间踏板在分档的编程范围内运动,这个阻力最好保持不变。当踏板被释放时,它将返回初始(最上方)位置。在功能方面,用户也可以把分楼渐变运动编程得能对所有适用的手术功能提供线性或通/断控制。例如,脚控组件15根据踏板的相对位移提供线性控制(例如从0°到下方15°对应于从0%的输出到100%的输出);根据踏板的绝对位移提供固定控制(例如0°至下方10°对应于“断”,下方10°至下方15°对应于“通”。
在水平方向或摆动方向上,中间踏板可提供约±10°的左右运动。在本例中,踏板有一个中央档,释放时它将返回初始(中央)位置。在功能方面,用户可以把摆动运动编程得能对所有适用的手术功能提供线性或通/断控制。例如,脚控组件15根据踏板的相对位移提供线性控制(例如0°至左侧10°对应于0%至100%的输出);根据踏板的绝对位移提供固定输出的通/断控制(例如从中央向左(右)运动对应于通(断))。
摇动开关最好是一个位于脚控组件15的中间踏板右侧的双位开关。释放时摇动开关将返回“断”(中央)位置。在功能方面,用户可以把摇动开关编程得能对所有适用的手术功能(例如,晶状体乳化和破碎的功率、双极功率、抽吸力、等等)提供向上/向下、增大/减小、或通/断控制。脚控组件的两个按钮开关最好与摇动开关相对地位于中间踏板的左侧。在一个优选实施例中,一个按钮开关专用于双极输出控制,而用户可以对另一个按钮开关编程,使它能控制某一个手术功能。释放时,按钮开关将返回“断”(向上)位置。
现在参见图38,系统1还含有IV柱组件17,该组件带有一个控制电路107(详细示于图137-146),用来控制一个电机753,使它去升高或降低IV柱组件17的IV柱高度。IV柱控制电路107最好能提供网络通信并根据至少一个工作参数来控制IV柱组件17的工作。虽然IV柱控制电路107不安装在基本单元7内,但它也含有一个神经元电路755,其中包括一个RS485发送接收机223和一个连接在发送接收机233上的神经处理器225。这样,神经元电路755提供IV柱控制电路107的网络通信控制。所以对于计算机网络来说,当IV柱组件17被IV柱控制电路107控制时,其作用将等价于模块13。换言之,IV柱控制电路107也连接在数据通信总线上,该总线在用户界面与IV柱控制电路107之间提供代表工作参数的数据的通信。神经元电路755还含有一个时钟电路757(例如晶体振荡器),用来为神经元225的工作提供时间基准。一个最好是由基本单元7供电的电源输入端759向IV柱控制电路107提供电源。
与脚控电路105类似,IV柱控制电路107的发送接收机223也通过一条数据电缆(未示出)连接到数据通信总线上,该电缆连接在底板101背面的连接器157上。神经元电路755也含有一个存储器763(例如闪速EEPROM),用来存储IV柱控制电路107的应用程序。在本例中,神经元处理器225执行用来根据IV柱组件17的工作参数去控制一个电机驱动电路765的内设应用程序。此外,存储器763还存储在网络上对IV柱控制电路107初始化时所使用的构形和识别数据。再有,与模块13的情况相同,中央处理器245能够在响应用户提供的信息时通过数据通信总线对存储器763进行重新编程。虽然图38中没有示出,但神经元电路755还含有一个监守计时器和另一个RS485发送接收机,后者用来从计算单元3接收复原信号。
IV柱组件17最好是仪器小车21的一个组成部分,用来支持例如两个500cc的液体容器,后者的高度最高可在小车21上方100cm处。并且,IV柱组件17的IV柱能以6cm/s的速度上下运动,其定位分辨率为1cm,定位重复性为2cm。在功能方面,用户借助于触摸屏255、遥控器39、或脚控组件15来设定IV柱的参数。一对限位开关767向神经元电路755提供关于IV柱高度的反馈。例如,当IV柱达到其允许的最大高度时,一个限位开关767将指令神经元电路755不要让电机753,继续向上驱动IV柱。类似地,当IV柱达到其最低高度时,另一个限位开关767将指令神经元电路755不要让电机753继续向下驱动IV柱。在另一个实施例中,用单个限位开关767探测IV柱是否达到其最低高度。在本实施例中,电机753是一个步进电机,神经元225通过对步数进行计数来判断IV柱是否达到其最大高度。
图39以方框图的形式示出电源模块103。如图所示,电源模块103有一个用来接收交流电源的电源输入端771。在一个可开关的电源电路775产生安装在基本单元7内的各种模块13所使用的各个直流电压之前,最好用一个电磁干扰(EMI)滤波器773改善输入的交流电源。然后有一个开关电路779通过底板连接器(例如连接器171)把这些直流电压提供给底板101。在一个优选实施例中,电源模块103含有一个最好位于图9所示的开口197内的互锁开关783,该开关是一个常断开关,以切断对底板101电源总线的供电。当前盖113被安装到基本单元7上时,突柱195将伸入开口197,从而使互锁开关783闭合。这样,系统1就能在每当更换模块13时提供复原条件,并防止用户在底板101带电时触及它。
电源模块103还含有一个状态LED787和一个风扇789,前者用来指明其激活状态,后者是用来防止模块内部过热。
所附的缩微胶片附录是一个列出了系统1软件的程序。根据这里所说明的本发明,计算机单元3通过执行列于该缩微胶片附录中的软件来提供本发明的用户界面和网络管理特征。此外,神经处理器225通过执行列于附录中的软件来控制各种显微手术器件19和周边设备。
根据以上讨论可以看出,本发明的几个目的已经达到,并且还得到了其他有益的结果。
由于在不偏离本发明范畴的情况下可以对上述各个结构和方法作出各种改变,所以上述说明中所包含的或附图中所示出的所有内容都应被解释为是说明性的而不具有限制的意义。
Claims (2)
1、一种用来控制多个连接在其上的眼科显微手术器械的系统,上述这些显微手术器械供用户,例如一位外科医生,在执行眼科手术处理时使用,上述系统包括:
一个数据通信总线;
一个连接在数据通信总线上的用户界面,上述用户界面向用户提供信息和从用户接收信息,其中的信息代表着显微手术器械的工作参数;
一个连接在一个显微手术器械上并根据至少一个工作参数控制该器械的第一手术模块,上述第一手术模块是被连接在数据通信总线上的;
一个连接在另一个显微手术器械上并根据至少一个工作参数控制该另一器械的第二手术模块,上述第二手术模块也是被连接在数据通信总线上的;
其中的数据通信总线在用户界面、第一和第二手术模块之间提供代表工作参数的数据的通信;
其中各手术模块包括一个处理器,其接收并响应经该数据通信总线传送的数据,用于生成控制信号以在执行外科手术程序期间控制对应的显微手术器械;
其中至少一手术模块包括一协处理器,其接收并响应由该处理器生成的控制信号,用于生成附加的控制信号以在执行外科手术程序期间提供对应的显微手术器械的闭环控制。
2、一种用来控制多个连接在其上的眼科显微手术器械的系统,上述这些显微手术器件供用户,例如一位外科医生,在执行眼科手术处理时使用,上述系统包括:
一个数据通信总线;
一个连接在数据通信总线上的用户界面,上述用户界面向用户提供信息和从用户接收信息,其中的信息代表着显微手术器械的工作参数;
一个连接在一个显微手术器械上并根据至少一个工作参数控制该器械的手术模块,上述手术模块是被连接在数据通信总线上的;
一个连接在一个遥控单元上并根据至少一个工作参数控制该遥控单元的遥控电路,上述遥控电路是被连接在数据通信总线上的,上述遥控单元的工作能在执行手术处理的过程中改变显微手术器械的工作参数;
其中的数据通信总线在用户界面、手术模块、和遥控电路之间提供代表工作参数的数据的通信;
其中该手术模块包括一个处理器,其接收并响应经该数据通信总线传送的数据,用于生成控制信号以在执行外科手术程序期间控制对应的显微手术器械;
其中该手术模块包括一协处理器,其接收并响应由该处理器生成的控制信号,用于生成附加的控制信号以在执行外科手术程序期间提供对应的显微手术器械的闭环控制。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US2549896P | 1996-08-29 | 1996-08-29 | |
| US60/025,498 | 1996-08-29 | ||
| US72139196A | 1996-09-26 | 1996-09-26 | |
| US08/721,391 | 1996-09-26 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1235528A true CN1235528A (zh) | 1999-11-17 |
| CN1146363C CN1146363C (zh) | 2004-04-21 |
Family
ID=26699814
Family Applications (10)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB971992665A Expired - Lifetime CN1182818C (zh) | 1996-08-29 | 1997-08-22 | 双环路频率与功率控制 |
| CNB2003101205513A Expired - Lifetime CN1278259C (zh) | 1996-08-29 | 1997-08-28 | 一种用于控制多个眼科显微手术器械的系统 |
| CNB971992673A Expired - Lifetime CN1149959C (zh) | 1996-08-29 | 1997-08-28 | 模式/手术功能 |
| CNB971992193A Expired - Lifetime CN1146363C (zh) | 1996-08-29 | 1997-08-28 | 具有神经元芯片通信的外科模块 |
| CN97199175A Pending CN1251507A (zh) | 1996-08-29 | 1997-08-28 | 眼科显微手术系统 |
| CNB971981566A Expired - Fee Related CN1161078C (zh) | 1996-08-29 | 1997-08-28 | 外科手术机头 |
| CNB971992827A Expired - Lifetime CN1148151C (zh) | 1996-08-29 | 1997-08-28 | 用于显微外科系统的脚控制器 |
| CNB971992770A Expired - Lifetime CN1154440C (zh) | 1996-08-29 | 1997-08-28 | 采用闪速eeprom和可重新编程模块的眼科显微手术系统 |
| CN97199276A Expired - Lifetime CN1132555C (zh) | 1996-08-29 | 1997-08-28 | 触摸屏上的模拟数字键盘 |
| CNB971992819A Expired - Fee Related CN1168420C (zh) | 1996-08-29 | 1997-08-28 | 多个眼科显微手术器械的控制系统 |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB971992665A Expired - Lifetime CN1182818C (zh) | 1996-08-29 | 1997-08-22 | 双环路频率与功率控制 |
| CNB2003101205513A Expired - Lifetime CN1278259C (zh) | 1996-08-29 | 1997-08-28 | 一种用于控制多个眼科显微手术器械的系统 |
| CNB971992673A Expired - Lifetime CN1149959C (zh) | 1996-08-29 | 1997-08-28 | 模式/手术功能 |
Family Applications After (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN97199175A Pending CN1251507A (zh) | 1996-08-29 | 1997-08-28 | 眼科显微手术系统 |
| CNB971981566A Expired - Fee Related CN1161078C (zh) | 1996-08-29 | 1997-08-28 | 外科手术机头 |
| CNB971992827A Expired - Lifetime CN1148151C (zh) | 1996-08-29 | 1997-08-28 | 用于显微外科系统的脚控制器 |
| CNB971992770A Expired - Lifetime CN1154440C (zh) | 1996-08-29 | 1997-08-28 | 采用闪速eeprom和可重新编程模块的眼科显微手术系统 |
| CN97199276A Expired - Lifetime CN1132555C (zh) | 1996-08-29 | 1997-08-28 | 触摸屏上的模拟数字键盘 |
| CNB971992819A Expired - Fee Related CN1168420C (zh) | 1996-08-29 | 1997-08-28 | 多个眼科显微手术器械的控制系统 |
Country Status (9)
| Country | Link |
|---|---|
| EP (13) | EP0955984B1 (zh) |
| JP (11) | JP4094063B2 (zh) |
| CN (10) | CN1182818C (zh) |
| AU (10) | AU724661B2 (zh) |
| BR (5) | BR9711275A (zh) |
| CA (9) | CA2264663C (zh) |
| DE (4) | DE69728793T2 (zh) |
| ES (4) | ES2222518T3 (zh) |
| WO (11) | WO1998008479A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112737433A (zh) * | 2020-12-31 | 2021-04-30 | 上海昱章电气成套设备有限公司 | 一种针对无刹车步进电机的控制方法、装置以及系统 |
| CN114939202A (zh) * | 2021-02-17 | 2022-08-26 | 克伊梅德(医疗和工业设备)有限公司 | 流体管理系统 |
Families Citing this family (224)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7169123B2 (en) | 1997-01-22 | 2007-01-30 | Advanced Medical Optics, Inc. | Control of pulse duty cycle based upon footswitch displacement |
| US6780165B2 (en) | 1997-01-22 | 2004-08-24 | Advanced Medical Optics | Micro-burst ultrasonic power delivery |
| DE19828677A1 (de) * | 1998-05-20 | 2000-04-20 | Hans Reinhard Koch | Operationssystem, insbesondere ophthalmologisches Operationssystem |
| US6602227B1 (en) * | 1998-09-25 | 2003-08-05 | Sherwood Services Ag | Surgical system console |
| US20010047183A1 (en) | 2000-04-05 | 2001-11-29 | Salvatore Privitera | Surgical device for the collection of soft tissue |
| US20080146965A1 (en) | 2003-08-11 | 2008-06-19 | Salvatore Privitera | Surgical Device for The Collection of Soft Tissue |
| CA2287087C (en) | 1998-10-23 | 2007-12-04 | Ethicon Endo-Surgery, Inc. | Surgical device for the collection of soft tissue |
| US6086544A (en) * | 1999-03-31 | 2000-07-11 | Ethicon Endo-Surgery, Inc. | Control apparatus for an automated surgical biopsy device |
| US6120462A (en) * | 1999-03-31 | 2000-09-19 | Ethicon Endo-Surgery, Inc. | Control method for an automated surgical biopsy device |
| US6793652B1 (en) | 1999-06-02 | 2004-09-21 | Power Medical Interventions, Inc. | Electro-mechanical surgical device |
| US6290690B1 (en) | 1999-06-21 | 2001-09-18 | Alcon Manufacturing, Ltd. | Simultaneous injection and aspiration of viscous fluids in a surgical system |
| US7107189B1 (en) * | 1999-11-29 | 2006-09-12 | General Electric Company | Method and apparatus for associating a field replaceable unit with a medical diagnostic system and recording operational data |
| EP1148770A3 (de) * | 2000-04-21 | 2008-01-02 | Söring GmbH | Plasmagenerator für die HF-Chirurgie |
| US6452123B1 (en) * | 2000-06-27 | 2002-09-17 | Advanced Medical Optics | Surgical foot pedal control including ribbon switch arrangement |
| DK1326565T3 (da) | 2000-10-17 | 2004-07-26 | Alcon Inc | Afbildelig fodstyreenhed til mikrokirurgisk system |
| JP4590128B2 (ja) * | 2001-05-18 | 2010-12-01 | 株式会社モリタ製作所 | 機能モジュール型の歯科用診療機器、この診療機器用の機能モジュール、この機能モジュールを用いる歯科用診療装置及び診療用機能モジュールユニット |
| US7470277B2 (en) | 2001-10-16 | 2008-12-30 | Alcon, Inc. | Simultaneous proportional control of surgical parameters in a microsurgical system |
| US6689975B2 (en) * | 2001-12-19 | 2004-02-10 | Bausch & Lomb Incorporated | Foot controller including multiple switch arrangement with heel operated, door-type switch actuator |
| DE10225857A1 (de) * | 2002-06-11 | 2004-01-22 | Aesculap Ag & Co. Kg | Chirurgisches Motorensystem |
| JP3905482B2 (ja) * | 2002-07-09 | 2007-04-18 | オリンパス株式会社 | 手術システム |
| US6862951B2 (en) | 2002-08-26 | 2005-03-08 | Alcon, Inc. | Footswitch |
| US8182440B2 (en) * | 2002-09-27 | 2012-05-22 | Baxter International Inc. | Dialysis machine having combination display and handle |
| US7316664B2 (en) | 2002-10-21 | 2008-01-08 | Advanced Medical Optics, Inc. | Modulated pulsed ultrasonic power delivery system and method |
| US6962581B2 (en) | 2002-12-03 | 2005-11-08 | Alcon, Inc. | Foot controller for microsurgical system |
| EP2604235A1 (en) | 2003-03-12 | 2013-06-19 | Abbott Medical Optics Inc. | System and method for pulsed ultrasonic power delivery employing cavitation effects |
| US7193169B2 (en) | 2003-10-29 | 2007-03-20 | Alcon, Inc. | Ergonomic footswitch |
| US7084364B2 (en) | 2003-11-13 | 2006-08-01 | Alcon, Inc. | Dual control footswitch assembly |
| US7019234B1 (en) | 2003-11-13 | 2006-03-28 | Alcon, Inc. | Footswitch |
| JP4390261B2 (ja) * | 2004-02-23 | 2009-12-24 | タカラベルモント株式会社 | フットコントローラ装置 |
| US7945341B2 (en) | 2004-11-30 | 2011-05-17 | Alcon, Inc. | Graphical user interface for selecting pulse parameters in a phacoemulsification surgical system |
| US7568619B2 (en) * | 2004-12-15 | 2009-08-04 | Alcon, Inc. | System and method for identifying and controlling ophthalmic surgical devices and components |
| JP2006263137A (ja) * | 2005-03-24 | 2006-10-05 | Takara Belmont Co Ltd | フットコントローラを使用した制御装置 |
| CA2803828C (en) | 2005-03-31 | 2015-11-24 | Alcon, Inc. | Footswitch operable to control a surgical system |
| US7619171B2 (en) | 2005-06-30 | 2009-11-17 | Alcon, Inc. | Multifunction surgical footswitch |
| US7626132B2 (en) | 2005-10-13 | 2009-12-01 | Alcon, Inc. | Foot controller |
| US8565839B2 (en) | 2005-10-13 | 2013-10-22 | Abbott Medical Optics Inc. | Power management for wireless devices |
| US8380126B1 (en) | 2005-10-13 | 2013-02-19 | Abbott Medical Optics Inc. | Reliable communications for wireless devices |
| DE602007009653D1 (de) | 2006-02-27 | 2010-11-18 | Alcon Inc | Computerprogramm und system für eine verfahrensbasierte graphische schnittstelle |
| EP2018130A1 (en) | 2006-03-27 | 2009-01-28 | Francesco Peluso | Modular expandable multifunction machine with automatic recognition of actuators for aesthetic and/or rehabilitative treatments |
| US20080003555A1 (en) * | 2006-06-29 | 2008-01-03 | Johan Ekvall | System and method for facilitating setup of surgical instrumentation and consumables associated therewith |
| US8272387B2 (en) * | 2006-06-30 | 2012-09-25 | Novartis Ag | System and method for the modification of surgical procedures using a graphical drag and drop interface |
| ES2356100T3 (es) * | 2006-07-25 | 2011-04-04 | Alcon, Inc. | Consola quirúrgica que puede funcionar para reproducir contenidos multimedia. |
| US7785336B2 (en) | 2006-08-01 | 2010-08-31 | Abbott Medical Optics Inc. | Vacuum sense control for phaco pulse shaping |
| US7381917B2 (en) | 2006-09-20 | 2008-06-03 | Alcon, Inc. | Footswitch assembly with position memory |
| JP5250735B2 (ja) * | 2006-10-05 | 2013-07-31 | アルコン,インコーポレイティド | 長寿命照明器 |
| ES2302450B1 (es) * | 2006-10-31 | 2009-07-24 | Centro De Estudios E Investigaciones Tecnicas De Guipuzcoa (Ceitg) | Pedal de accionamiento, para aplicaciones medicas. |
| US9295765B2 (en) | 2006-11-09 | 2016-03-29 | Abbott Medical Optics Inc. | Surgical fluidics cassette supporting multiple pumps |
| US10959881B2 (en) | 2006-11-09 | 2021-03-30 | Johnson & Johnson Surgical Vision, Inc. | Fluidics cassette for ocular surgical system |
| US9522221B2 (en) | 2006-11-09 | 2016-12-20 | Abbott Medical Optics Inc. | Fluidics cassette for ocular surgical system |
| US8491528B2 (en) | 2006-11-09 | 2013-07-23 | Abbott Medical Optics Inc. | Critical alignment of fluidics cassettes |
| US8414534B2 (en) | 2006-11-09 | 2013-04-09 | Abbott Medical Optics Inc. | Holding tank devices, systems, and methods for surgical fluidics cassette |
| US20080114387A1 (en) * | 2006-11-10 | 2008-05-15 | Hertweck David W | Dual linear ultrasound control |
| DK2088983T3 (en) * | 2006-11-22 | 2018-05-07 | Planmeca Oy | Console for appliances and dental unit |
| CN101283927B (zh) * | 2007-04-12 | 2011-08-03 | 上海异锝高新技术有限公司 | 一种手术物品处理方法与系统 |
| US10596032B2 (en) | 2007-05-24 | 2020-03-24 | Johnson & Johnson Surgical Vision, Inc. | System and method for controlling a transverse phacoemulsification system with a footpedal |
| US10363166B2 (en) | 2007-05-24 | 2019-07-30 | Johnson & Johnson Surgical Vision, Inc. | System and method for controlling a transverse phacoemulsification system using sensed data |
| US10485699B2 (en) | 2007-05-24 | 2019-11-26 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for transverse phacoemulsification |
| EP1995679A1 (de) | 2007-05-25 | 2008-11-26 | Karl Storz GmbH & Co. KG | Vorrichtung und Verfahren zur zentralen Überwachung und/oder Steuerung wenigstens eines Gerätes |
| DE102007031716B4 (de) * | 2007-07-06 | 2012-12-06 | Carl Zeiss Meditec Ag | Kommunikationseinrichtung für ein chirurgisches System und chirurgisches System, inbesondere ophthalmisches mikrochirurgisches System zur Phako-Chirurgie |
| DE102007031717B4 (de) * | 2007-07-06 | 2012-12-06 | Carl Zeiss Meditec Ag | Kommunikationseinrichtung für eine chirurgisches System und chirurgisches System, inbesondere ophthalmisches mikrochirurgisches System zur Phako-Chirurgie |
| US8162633B2 (en) | 2007-08-02 | 2012-04-24 | Abbott Medical Optics Inc. | Volumetric fluidics pump with translating shaft path |
| US10342701B2 (en) | 2007-08-13 | 2019-07-09 | Johnson & Johnson Surgical Vision, Inc. | Systems and methods for phacoemulsification with vacuum based pumps |
| US7981109B2 (en) | 2007-08-15 | 2011-07-19 | Novartis Ag | System and method for a user interface |
| JP5380721B2 (ja) * | 2007-09-13 | 2014-01-08 | カール ツアイス メディテック アクチエンゲゼルシャフト | 水晶体超音波乳化吸引装置及び該装置の動作方法 |
| WO2009062031A1 (en) * | 2007-11-07 | 2009-05-14 | Alcon Research, Ltd. | Surgical console information display system and method |
| JP2011505919A (ja) | 2007-12-07 | 2011-03-03 | ゼヴェクス・インコーポレーテッド | セラミック素子の分割電極を使用するランジュバン型振動子に横運動を誘発する方法 |
| US9314553B2 (en) | 2008-01-10 | 2016-04-19 | Alcon Research, Ltd. | Surgical system |
| JP2008246202A (ja) * | 2008-03-10 | 2008-10-16 | Morita Mfg Co Ltd | 根管長測定器、この根管長測定器用の機能モジュール及び機能モジュール型の歯科用診療機器 |
| US8454551B2 (en) | 2008-08-22 | 2013-06-04 | Zevex, Inc. | Removable adapter for phacoemulsification handpiece having irrigation and aspiration fluid paths |
| JP5301945B2 (ja) * | 2008-10-22 | 2013-09-25 | 株式会社ニデック | 灌流吸引装置 |
| CA2742978C (en) | 2008-11-07 | 2017-08-15 | Abbott Medical Optics Inc. | Controlling of multiple pumps |
| AU2009313416B2 (en) | 2008-11-07 | 2015-03-26 | Johnson & Johnson Surgical Vision, Inc. | Surgical cassette apparatus |
| CA2941772C (en) | 2008-11-07 | 2018-10-23 | Abbott Medical Optics Inc. | Automatically switching different aspiration levels and/or pumps to an ocular probe |
| US9795507B2 (en) | 2008-11-07 | 2017-10-24 | Abbott Medical Optics Inc. | Multifunction foot pedal |
| CA2733825C (en) | 2008-11-07 | 2017-09-12 | Abbott Medical Optics Inc. | Method for programming foot pedal settings and controlling performance through foot pedal variation |
| AU2009313384B2 (en) | 2008-11-07 | 2015-06-11 | Johnson & Johnson Surgical Vision, Inc. | Automatically pulsing different aspiration levels to an ocular probe |
| AU2009313421B2 (en) | 2008-11-07 | 2015-03-05 | Johnson & Johnson Surgical Vision, Inc. | Semi-automatic device calibraton |
| EP3156012B1 (en) | 2008-11-07 | 2021-10-20 | Johnson & Johnson Surgical Vision, Inc. | Adjustable foot pedal control for ophthalmic surgery |
| US9492317B2 (en) | 2009-03-31 | 2016-11-15 | Abbott Medical Optics Inc. | Cassette capture mechanism |
| ES2569953T5 (es) * | 2009-09-04 | 2019-06-18 | Bausch & Lomb | Dispositivo de iluminación para su uso en un equipo quirúrgico oftálmico |
| US8876757B2 (en) | 2009-11-12 | 2014-11-04 | Abbott Medical Optics Inc. | Fluid level detection system |
| WO2011081897A1 (en) * | 2009-12-15 | 2011-07-07 | Alcon Research, Ltd. | High-intensity pulsed electric field vitrectomy apparatus |
| US10154923B2 (en) | 2010-07-15 | 2018-12-18 | Eyenovia, Inc. | Drop generating device |
| DE102010039177A1 (de) * | 2010-08-11 | 2012-02-16 | Robert Bosch Gmbh | Steckerelement für ein Kommunikationssystem sowie Kommunikationsbussysteme |
| US9050627B2 (en) | 2011-09-02 | 2015-06-09 | Abbott Medical Optics Inc. | Systems and methods for ultrasonic power measurement and control of phacoemulsification systems |
| DE202011108124U1 (de) * | 2011-11-15 | 2013-02-18 | Xion Gmbh | Geräteträgersystem mit mehreren elektrischen Geräten sowie Geräteträger |
| CA2875074A1 (en) | 2012-03-17 | 2013-09-26 | Abbott Medical Optics Inc. | Surgical cassette |
| US9788851B2 (en) * | 2012-04-18 | 2017-10-17 | Ethicon Llc | Surgical instrument with tissue density sensing |
| SG10201602609XA (en) | 2012-05-15 | 2016-05-30 | Eyenovia Inc | Ejector devices, methods, drivers, and circuits therefor |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| EA038924B1 (ru) | 2012-05-25 | 2021-11-10 | Те Риджентс Оф Те Юниверсити Оф Калифорния | Способы и композиции рнк-специфической модификации днк-мишени и рнк-специфической модуляции транскрипции |
| EP2859653B1 (en) * | 2012-06-08 | 2018-01-17 | Telefonaktiebolaget LM Ericsson (publ) | Controlling a switched mode power supply with maximised power efficiency |
| BR112015000777A2 (pt) * | 2012-07-13 | 2017-06-27 | Garland Commercial Ind Llc | dispositivos de posicionamento de prato de prensa com precisão e métodos para grelhas |
| US9887562B2 (en) * | 2012-12-03 | 2018-02-06 | Covidien Lp | Smart cart |
| CA2891808C (en) * | 2012-12-21 | 2020-12-01 | Alcon Research Ltd. | Cassette clamp mechanism |
| US10238534B2 (en) * | 2013-03-07 | 2019-03-26 | Novartis Ag | Systems and processes for eye moisturizing during ocular surgery |
| JP6110487B2 (ja) * | 2013-06-14 | 2017-04-05 | バーフェリヒト ゲゼルシャフト ミット ベシュレンクテル ハフツング | カスタマイズされた屈折矯正手術のための自動機械設定 |
| WO2016030023A1 (en) * | 2014-08-29 | 2016-03-03 | Aktive Srl | Ophthalmic surgery device |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| CN106667547A (zh) * | 2016-06-23 | 2017-05-17 | 山东威瑞外科医用制品有限公司 | 超声刀刀杆谐振控制装置及控制方法 |
| PL3295906T3 (pl) * | 2016-09-14 | 2022-01-03 | FRITZ RUCK Ophthalmologische Systeme GmbH | Układ do przeprowadzania fakoemulsyfikacji |
| CN106344119A (zh) * | 2016-10-25 | 2017-01-25 | 厚凯(天津)医疗科技有限公司 | 一种直接激励式超声功率驱动系统 |
| US10736700B2 (en) | 2016-11-17 | 2020-08-11 | Alcon Inc. | Ergonomic foot-operated system |
| CN106726289A (zh) * | 2016-12-27 | 2017-05-31 | 苏州科技城医院 | 医用手推车 |
| AU2018258674A1 (en) | 2017-04-28 | 2019-11-14 | Stryker Corporation | System and method for indicating mapping of console-based surgical systems |
| CN110636811A (zh) * | 2017-05-24 | 2019-12-31 | 柯惠Lp公司 | 用于机器人手术系统的踏板控制 |
| JP7227163B2 (ja) | 2017-06-10 | 2023-02-21 | アイノビア,インコーポレイティド | 流体を取扱い、目に流体を送出するための方法および装置 |
| NL2019147B1 (en) | 2017-06-29 | 2019-01-14 | D O R C Dutch Ophthalmic Res Center International B V | A foot pedal control unit |
| IL253677B2 (en) | 2017-07-26 | 2023-06-01 | Epitech Mag Ltd | A magnetic device for the treatment of living tissues |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11026712B2 (en) | 2017-10-30 | 2021-06-08 | Cilag Gmbh International | Surgical instruments comprising a shifting mechanism |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11123070B2 (en) | 2017-10-30 | 2021-09-21 | Cilag Gmbh International | Clip applier comprising a rotatable clip magazine |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US10595887B2 (en) | 2017-12-28 | 2020-03-24 | Ethicon Llc | Systems for adjusting end effector parameters based on perioperative information |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US11013563B2 (en) | 2017-12-28 | 2021-05-25 | Ethicon Llc | Drive arrangements for robot-assisted surgical platforms |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US20190201042A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Determining the state of an ultrasonic electromechanical system according to frequency shift |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US20190201112A1 (en) * | 2017-12-28 | 2019-07-04 | Ethicon Llc | Computer implemented interactive surgical systems |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11771487B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Mechanisms for controlling different electromechanical systems of an electrosurgical instrument |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11596291B2 (en) | 2017-12-28 | 2023-03-07 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying of the location of the tissue within the jaws |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11678927B2 (en) | 2018-03-08 | 2023-06-20 | Cilag Gmbh International | Detection of large vessels during parenchymal dissection using a smart blade |
| US11464532B2 (en) | 2018-03-08 | 2022-10-11 | Cilag Gmbh International | Methods for estimating and controlling state of ultrasonic end effector |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US11197668B2 (en) | 2018-03-28 | 2021-12-14 | Cilag Gmbh International | Surgical stapling assembly comprising a lockout and an exterior access orifice to permit artificial unlocking of the lockout |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11804679B2 (en) | 2018-09-07 | 2023-10-31 | Cilag Gmbh International | Flexible hand-switch circuit |
| US11696791B2 (en) | 2018-09-07 | 2023-07-11 | Cilag Gmbh International | Surgical instrument utilizing drive signal to power secondary function |
| US20200078120A1 (en) | 2018-09-07 | 2020-03-12 | Ethicon Llc | Modular surgical energy system with module positional awareness with digital logic |
| US20200078113A1 (en) | 2018-09-07 | 2020-03-12 | Ethicon Llc | Port presence detection system for modular energy system |
| US11923084B2 (en) | 2018-09-07 | 2024-03-05 | Cilag Gmbh International | First and second communication protocol arrangement for driving primary and secondary devices through a single port |
| US11642243B2 (en) * | 2018-12-10 | 2023-05-09 | Alcon Inc. | Methods of solenoid valve control optimization |
| CN109620605B (zh) * | 2018-12-29 | 2020-07-14 | 中国人民解放军陆军军医大学第一附属医院 | 一种吸盘式防倾倒输液车 |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11291445B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical staple cartridges with integral authentication keys |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| US11218822B2 (en) | 2019-03-29 | 2022-01-04 | Cilag Gmbh International | Audio tone construction for an energy module of a modular energy system |
| JP7205359B2 (ja) * | 2019-04-15 | 2023-01-17 | ニプロ株式会社 | 医療機器のラック機構 |
| EP3744285A1 (en) * | 2019-05-27 | 2020-12-02 | Leica Instruments (Singapore) Pte. Ltd. | Microscope system and method for controlling a surgical microcope |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| USD928726S1 (en) | 2019-09-05 | 2021-08-24 | Cilag Gmbh International | Energy module monopolar port |
| USD924139S1 (en) | 2019-09-05 | 2021-07-06 | Ethicon Llc | Energy module with a backplane connector |
| USD939545S1 (en) | 2019-09-05 | 2021-12-28 | Cilag Gmbh International | Display panel or portion thereof with graphical user interface for energy module |
| USD928725S1 (en) | 2019-09-05 | 2021-08-24 | Cilag Gmbh International | Energy module |
| US11877953B2 (en) | 2019-12-26 | 2024-01-23 | Johnson & Johnson Surgical Vision, Inc. | Phacoemulsification apparatus |
| US11141601B2 (en) * | 2020-01-27 | 2021-10-12 | Epitech Mag Ltd. | Ocular positioning device for use with magnetic treatment apparatus |
| JP2022046056A (ja) * | 2020-09-10 | 2022-03-23 | ソニーグループ株式会社 | 眼科手術システム、制御方法、及びプログラム |
| CN112618155A (zh) * | 2020-12-17 | 2021-04-09 | 上海市普陀区中心医院 | 一种用于眼科激光手术的滤光防护结构 |
| US20220317750A1 (en) * | 2021-03-30 | 2022-10-06 | Ethicon Llc | Backplane connector attachment mechanism for modular energy system |
| US11968776B2 (en) | 2021-03-30 | 2024-04-23 | Cilag Gmbh International | Method for mechanical packaging for modular energy system |
| US11963727B2 (en) | 2021-03-30 | 2024-04-23 | Cilag Gmbh International | Method for system architecture for modular energy system |
| US11950860B2 (en) | 2021-03-30 | 2024-04-09 | Cilag Gmbh International | User interface mitigation techniques for modular energy systems |
| US11857252B2 (en) | 2021-03-30 | 2024-01-02 | Cilag Gmbh International | Bezel with light blocking features for modular energy system |
| JPWO2022269971A1 (zh) * | 2021-06-23 | 2022-12-29 | ||
| CN113252977B (zh) * | 2021-06-25 | 2021-10-01 | 武汉半边天医疗技术发展有限公司 | 一种超声波换能器的寻频电路和寻频方法 |
| US11847270B2 (en) * | 2021-11-29 | 2023-12-19 | Endress+Hauser SE+Co. KG | Device menu controls connector |
| WO2023209462A1 (en) * | 2022-04-26 | 2023-11-02 | Johnson & Johnson Surgical Vision, Inc. | Driving a phacoemulsifier actuator |
Family Cites Families (69)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS517000B1 (zh) * | 1970-01-05 | 1976-03-03 | ||
| US3832776A (en) * | 1972-11-24 | 1974-09-03 | H Sawyer | Electronically powered knife |
| US4114110A (en) | 1977-12-01 | 1978-09-12 | The United States Of America As Represented By The Secretary Of The Army | Frequency synthesizer |
| US4258716A (en) * | 1978-02-06 | 1981-03-31 | The University Of Melbourne | Microsurgical instruments |
| US4293924A (en) * | 1979-05-30 | 1981-10-06 | Allen-Bradley Company | Programmable controller with high density intelligent I/O interface |
| US4484154A (en) | 1981-09-04 | 1984-11-20 | Rockwell International Corporation | Frequency control with a phase-locked-loop |
| US4722350A (en) * | 1984-09-21 | 1988-02-02 | Armeniades C D | Ophthalmic instrument for measuring intraocular fluid pressure |
| US4721344A (en) * | 1984-10-22 | 1988-01-26 | Kelsey-Hayes Company | Electric brake controller |
| US4757814A (en) | 1985-02-28 | 1988-07-19 | Alcon Laboratories, Inc. | Proportional control for pneumatic cutting device |
| US4680753A (en) * | 1985-04-03 | 1987-07-14 | Texas Instruments Incorporated | System and method for controlling network bus communications for input-output interlocking information among distributed programmable controllers |
| US4704676A (en) * | 1986-03-24 | 1987-11-03 | The Foxboro Company | Method and apparatus for configuring a controller |
| US4725694A (en) * | 1986-05-13 | 1988-02-16 | American Telephone And Telegraph Company, At&T Bell Laboratories | Computer interface device |
| US4705500A (en) * | 1986-07-17 | 1987-11-10 | Mentor O & O, Inc. | Ophthalmic aspirator-irrigator |
| US4773897A (en) | 1986-11-06 | 1988-09-27 | Storz Instrument Company | Collection container for ophthalmic surgical system |
| US4933843A (en) | 1986-11-06 | 1990-06-12 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| US5157603A (en) * | 1986-11-06 | 1992-10-20 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| US4970656A (en) | 1986-11-07 | 1990-11-13 | Alcon Laboratories, Inc. | Analog drive for ultrasonic probe with tunable phase angle |
| US4911161A (en) * | 1987-04-29 | 1990-03-27 | Noetix, Inc. | Capsulectomy cutting apparatus |
| US4937777A (en) * | 1987-10-07 | 1990-06-26 | Allen-Bradley Company, Inc. | Programmable controller with multiple task processors |
| JPH01175606A (ja) * | 1987-12-29 | 1989-07-12 | Fuji Electric Co Ltd | プログラマブル・コントローラ |
| US4897777A (en) * | 1988-04-11 | 1990-01-30 | Square D Company | Peer-to-peer register exchange controller for PLCS |
| JPH0756003Y2 (ja) * | 1988-10-07 | 1995-12-25 | オリンパス光学工業株式会社 | 手術用顕微鏡 |
| GB2224370B (en) * | 1988-11-01 | 1993-08-04 | Toshiba Machine Co Ltd | Input display apparatus |
| US5097219A (en) | 1988-12-15 | 1992-03-17 | Mitsubishi Denki Kabushiki Kaisha | Pll for controlling frequency deviation of a variable frequency oscillator |
| US5065141A (en) * | 1989-03-13 | 1991-11-12 | Square D Company | Expanded register rack for a programmable logic controller |
| US4983901A (en) * | 1989-04-21 | 1991-01-08 | Allergan, Inc. | Digital electronic foot control for medical apparatus and the like |
| US5019035A (en) * | 1989-06-07 | 1991-05-28 | Alcon Surgical, Inc. | Cutting assembly for surgical cutting instrument |
| US5149176A (en) * | 1989-08-07 | 1992-09-22 | Tekonsha Engineering Company | Controller for electric braking systems |
| US5050937A (en) * | 1989-08-07 | 1991-09-24 | Tekonsha Engineering Company | Controller for electric braking systems |
| US5139509A (en) * | 1989-08-25 | 1992-08-18 | Site Microsurgical Systems, Inc. | Phacoemulsification system with handpiece simulator |
| US4973876A (en) | 1989-09-20 | 1990-11-27 | Branson Ultrasonics Corporation | Ultrasonic power supply |
| US5417246A (en) * | 1989-10-27 | 1995-05-23 | American Cyanamid Company | Pneumatic controls for ophthalmic surgical system |
| US5249121A (en) * | 1989-10-27 | 1993-09-28 | American Cyanamid Company | Remote control console for surgical control system |
| US5091656A (en) * | 1989-10-27 | 1992-02-25 | Storz Instrument Company | Footswitch assembly with electrically engaged detents |
| DE69019289T2 (de) * | 1989-10-27 | 1996-02-01 | Storz Instr Co | Verfahren zum Antreiben eines Ultraschallwandlers. |
| EP0424686A1 (en) * | 1989-10-27 | 1991-05-02 | Storz Instrument Company | Control system for ophthalmic surgical instruments |
| US5591185A (en) * | 1989-12-14 | 1997-01-07 | Corneal Contouring Development L.L.C. | Method and apparatus for reprofiling or smoothing the anterior or stromal cornea by scraping |
| US5056001A (en) * | 1989-12-20 | 1991-10-08 | Ge Fanuc Automation North America, Inc. | Method for configuring an input/output module coupled to a programmable logic controller |
| US5170193A (en) * | 1989-12-22 | 1992-12-08 | Phoenix Laser Systems, Inc. | Apparatus and method of identifying signals in biological tissues |
| JP2994418B2 (ja) * | 1990-03-30 | 1999-12-27 | オリンパス光学工業株式会社 | 内視鏡システム |
| US5072195A (en) | 1990-04-05 | 1991-12-10 | Gazelle Microcircuits, Inc. | Phase-locked loop with clamped voltage-controlled oscillator |
| DE59006779D1 (de) * | 1990-05-09 | 1994-09-15 | Siemens Ag | Medizinische, insbesondere zahnmedizinische Einrichtung. |
| JP2758257B2 (ja) * | 1990-08-07 | 1998-05-28 | 株式会社東芝 | 計算機システム |
| DE4026452C2 (de) * | 1990-08-21 | 1993-12-02 | Schott Glaswerke | Vorrichtung zur Erkennung und Unterscheidung von unter eine Steckverbindung an einen Laser anschließbaren medizinischen Einwegapplikatoren |
| US5486286A (en) * | 1991-04-19 | 1996-01-23 | Althin Medical, Inc. | Apparatus for performing a self-test of kidney dialysis membrane |
| EP0596967A4 (en) * | 1991-07-31 | 1994-10-19 | Mentor O & O Inc | OPERATING CONTROL OF A HANDPIECE DURING AN OPHTHALMIC SURGERY PROCEDURE. |
| US5441042A (en) * | 1991-08-05 | 1995-08-15 | Putman; John M. | Endoscope instrument holder |
| US5275607A (en) * | 1991-09-23 | 1994-01-04 | Visionary Medical, Inc. | Intraocular surgical scissors |
| US5474558A (en) * | 1992-04-30 | 1995-12-12 | Neubardt; Seth L. | Procedure and system for spinal pedicle screw insertion |
| US5210509A (en) | 1992-05-29 | 1993-05-11 | Unisys Corporation | Dual loop phase locked circuit with sweep generator and compensation for drift |
| WO1993025968A1 (en) * | 1992-06-10 | 1993-12-23 | Furtek Frederick C | A modular computer based on reconfigurable logic |
| US5388569A (en) * | 1992-09-04 | 1995-02-14 | American Cyanamid Co | Phacoemulsification probe circuit with switch drive |
| US5268624A (en) * | 1992-10-14 | 1993-12-07 | Allergan, Inc. | Foot pedal control with user-selectable operational ranges |
| US5314440A (en) * | 1992-11-02 | 1994-05-24 | Henry Shapiro | Microsurgical scissor apparatus |
| DE9218373U1 (de) * | 1992-12-14 | 1994-01-27 | Dornier Medizintechnik | Arbeitsplatz für die minimal invasive Chirurgie |
| US5626563A (en) * | 1993-01-12 | 1997-05-06 | Minnesota Mining And Manufacturing Company | Irrigation system with tubing cassette |
| ATE225964T1 (de) * | 1993-03-31 | 2002-10-15 | Luma Corp | Informationsverwaltung in einem endoskopiesystem |
| US5333948A (en) * | 1993-06-22 | 1994-08-02 | Tekonsha Engineering Company | Multiple-gain electronic brake actuator with trigger point inertial sensor |
| JP2500635B2 (ja) * | 1993-07-10 | 1996-05-29 | 日本電気株式会社 | ネットワ―クのモジュラ―型集線装置 |
| US5537343A (en) * | 1993-09-02 | 1996-07-16 | Elonex Technologies, Inc. | Digital assistant system having a host computer with a docking bay and a moveable heat sink for cooling a docked module |
| US5446416A (en) | 1993-10-20 | 1995-08-29 | Industrial Technology Research Institute | Time acquisition system with dual-loop for independent frequency phase lock |
| US5531697A (en) * | 1994-04-15 | 1996-07-02 | Sims Deltec, Inc. | Systems and methods for cassette identification for drug pumps |
| JPH07111663B2 (ja) * | 1993-12-28 | 1995-11-29 | コナミ株式会社 | 操作用フットペダル |
| US5411513A (en) * | 1994-02-24 | 1995-05-02 | Danek Medical, Inc. | Transmission mechanism for a surgical cutting instrument |
| JPH07263569A (ja) * | 1994-03-18 | 1995-10-13 | Yamatake Honeywell Co Ltd | Ram搭載モジュール |
| US5460490A (en) * | 1994-05-19 | 1995-10-24 | Linvatec Corporation | Multi-purpose irrigation/aspiration pump system |
| US5554894A (en) * | 1994-10-28 | 1996-09-10 | Iolab Corporation | Electronic footswitch for ophthalmic surgery |
| AU4006895A (en) * | 1994-10-28 | 1996-05-23 | Chiron Vision Corporation | Control system for opthalmic surgery |
| US6487513B1 (en) * | 1995-06-07 | 2002-11-26 | Toshiba America Medical Systems, Inc. | Diagnostic test unit network and system |
-
1997
- 1997-08-22 AU AU40840/97A patent/AU724661B2/en not_active Expired
- 1997-08-22 WO PCT/US1997/014841 patent/WO1998008479A1/en active IP Right Grant
- 1997-08-22 EP EP97938540A patent/EP0955984B1/en not_active Expired - Lifetime
- 1997-08-22 CN CNB971992665A patent/CN1182818C/zh not_active Expired - Lifetime
- 1997-08-22 CA CA002264663A patent/CA2264663C/en not_active Expired - Lifetime
- 1997-08-22 JP JP51176498A patent/JP4094063B2/ja not_active Expired - Lifetime
- 1997-08-22 ES ES97938540T patent/ES2222518T3/es not_active Expired - Lifetime
- 1997-08-22 DE DE69728793T patent/DE69728793T2/de not_active Expired - Lifetime
- 1997-08-28 AU AU43298/97A patent/AU723086B2/en not_active Expired
- 1997-08-28 EP EP97941376A patent/EP1006893A4/en not_active Ceased
- 1997-08-28 JP JP51193398A patent/JP2002510980A/ja active Pending
- 1997-08-28 DE DE69734592T patent/DE69734592T2/de not_active Expired - Lifetime
- 1997-08-28 AU AU42405/97A patent/AU723513B2/en not_active Ceased
- 1997-08-28 CN CNB2003101205513A patent/CN1278259C/zh not_active Expired - Lifetime
- 1997-08-28 CN CNB971992673A patent/CN1149959C/zh not_active Expired - Lifetime
- 1997-08-28 AU AU41693/97A patent/AU4169397A/en not_active Abandoned
- 1997-08-28 BR BR9711275-5A patent/BR9711275A/pt not_active Application Discontinuation
- 1997-08-28 WO PCT/US1997/015178 patent/WO1998008442A1/en not_active Application Discontinuation
- 1997-08-28 WO PCT/US1997/015224 patent/WO1998008451A1/en active Application Filing
- 1997-08-28 CA CA002264659A patent/CA2264659C/en not_active Expired - Fee Related
- 1997-08-28 ES ES97940683T patent/ES2252792T3/es not_active Expired - Lifetime
- 1997-08-28 AU AU43299/97A patent/AU723829B2/en not_active Expired
- 1997-08-28 CA CA002264103A patent/CA2264103C/en not_active Expired - Lifetime
- 1997-08-28 WO PCT/US1997/015197 patent/WO1998008448A1/en active Application Filing
- 1997-08-28 BR BR9711274-7A patent/BR9711274A/pt unknown
- 1997-08-28 JP JP51194898A patent/JP4467645B2/ja not_active Expired - Lifetime
- 1997-08-28 WO PCT/US1997/015225 patent/WO1998008452A1/en active IP Right Grant
- 1997-08-28 BR BR9711287-9A patent/BR9711287A/pt not_active Application Discontinuation
- 1997-08-28 CN CNB971992193A patent/CN1146363C/zh not_active Expired - Lifetime
- 1997-08-28 EP EP97939636A patent/EP0955899A4/en not_active Ceased
- 1997-08-28 JP JP10511932A patent/JP2000515050A/ja active Pending
- 1997-08-28 JP JP51192498A patent/JP2002509454A/ja active Pending
- 1997-08-28 EP EP05075313A patent/EP1550405A3/en not_active Withdrawn
- 1997-08-28 CN CN97199175A patent/CN1251507A/zh active Pending
- 1997-08-28 WO PCT/US1997/015196 patent/WO1998008447A1/en not_active Application Discontinuation
- 1997-08-28 EP EP07123035A patent/EP1925274A3/en not_active Withdrawn
- 1997-08-28 JP JP51194698A patent/JP2001522255A/ja active Pending
- 1997-08-28 DE DE69739442T patent/DE69739442D1/de not_active Expired - Lifetime
- 1997-08-28 EP EP97940672A patent/EP1006891A1/en not_active Withdrawn
- 1997-08-28 AU AU42394/97A patent/AU4239497A/en not_active Abandoned
- 1997-08-28 AU AU42404/97A patent/AU723587B2/en not_active Expired
- 1997-08-28 CN CNB971981566A patent/CN1161078C/zh not_active Expired - Fee Related
- 1997-08-28 WO PCT/US1997/015203 patent/WO1998008449A1/en active IP Right Grant
- 1997-08-28 JP JP51192198A patent/JP2001522254A/ja active Pending
- 1997-08-28 CA CA002264040A patent/CA2264040C/en not_active Expired - Lifetime
- 1997-08-28 WO PCT/US1997/015183 patent/WO1998008446A1/en active Application Filing
- 1997-08-28 JP JP51194998A patent/JP2001522257A/ja active Pending
- 1997-08-28 CA CA002264041A patent/CA2264041C/en not_active Expired - Lifetime
- 1997-08-28 EP EP97939657A patent/EP0951241A4/en not_active Ceased
- 1997-08-28 AU AU41678/97A patent/AU720530B2/en not_active Expired
- 1997-08-28 EP EP05075314A patent/EP1550406A3/en not_active Withdrawn
- 1997-08-28 ES ES97940684T patent/ES2326603T3/es not_active Expired - Lifetime
- 1997-08-28 CA CA002264036A patent/CA2264036C/en not_active Expired - Lifetime
- 1997-08-28 AU AU40939/97A patent/AU4093997A/en not_active Abandoned
- 1997-08-28 EP EP97940684A patent/EP1006892B1/en not_active Expired - Lifetime
- 1997-08-28 WO PCT/US1997/015223 patent/WO1998008450A1/en not_active Application Discontinuation
- 1997-08-28 CN CNB971992827A patent/CN1148151C/zh not_active Expired - Lifetime
- 1997-08-28 BR BR9711646-7A patent/BR9711646A/pt not_active Application Discontinuation
- 1997-08-28 JP JP51193698A patent/JP2002510981A/ja not_active Ceased
- 1997-08-28 DE DE69731225T patent/DE69731225T2/de not_active Expired - Fee Related
- 1997-08-28 AU AU41692/97A patent/AU723523B2/en not_active Expired
- 1997-08-28 ES ES97940679T patent/ES2231888T3/es not_active Expired - Lifetime
- 1997-08-28 CA CA002264738A patent/CA2264738A1/en not_active Abandoned
- 1997-08-28 EP EP97940679A patent/EP0949881B1/en not_active Expired - Lifetime
- 1997-08-28 CN CNB971992770A patent/CN1154440C/zh not_active Expired - Lifetime
- 1997-08-28 BR BR9711288-7A patent/BR9711288A/pt not_active Application Discontinuation
- 1997-08-28 CA CA002263975A patent/CA2263975C/en not_active Expired - Lifetime
- 1997-08-28 CA CA002264145A patent/CA2264145C/en not_active Expired - Fee Related
- 1997-08-28 CN CN97199276A patent/CN1132555C/zh not_active Expired - Lifetime
- 1997-08-28 EP EP97941377A patent/EP1006894A4/en not_active Ceased
- 1997-08-28 EP EP97940683A patent/EP0929263B1/en not_active Expired - Lifetime
- 1997-08-28 WO PCT/US1997/015182 patent/WO1998008445A1/en not_active Application Discontinuation
- 1997-08-28 WO PCT/US1997/015227 patent/WO1998008453A1/en active Application Filing
- 1997-08-28 CN CNB971992819A patent/CN1168420C/zh not_active Expired - Fee Related
- 1997-08-28 EP EP06009956A patent/EP1704839A1/en not_active Withdrawn
-
2007
- 2007-05-14 JP JP2007127618A patent/JP4551423B2/ja not_active Expired - Fee Related
-
2009
- 2009-12-08 JP JP2009278874A patent/JP2010088916A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112737433A (zh) * | 2020-12-31 | 2021-04-30 | 上海昱章电气成套设备有限公司 | 一种针对无刹车步进电机的控制方法、装置以及系统 |
| CN112737433B (zh) * | 2020-12-31 | 2022-12-06 | 上海昱章电气股份有限公司 | 一种针对无刹车步进电机的控制方法、装置以及系统 |
| CN114939202A (zh) * | 2021-02-17 | 2022-08-26 | 克伊梅德(医疗和工业设备)有限公司 | 流体管理系统 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1146363C (zh) | 具有神经元芯片通信的外科模块 | |
| US6251113B1 (en) | Ophthalmic microsurgical system employing surgical module employing flash EEPROM and reprogrammable modules | |
| US6055458A (en) | Modes/surgical functions | |
| US5910139A (en) | Numeric keypad simulated on touchscreen | |
| US6117126A (en) | Surgical module with independent microprocessor-based communication | |
| US6086598A (en) | Ophthalmic microsurgical system having color sensor for cassette identification | |
| US6086576A (en) | Automatically switching the termination of a communications bus | |
| MXPA99001987A (en) | Modes/surgical functions | |
| MXPA99001986A (es) | Sistema microquirurgico oftalmico, que emplea modulos reprogramables y eeprom de flash |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C56 | Change in the name or address of the patentee |
Owner name: BAUSCH + LOMB INCORPORATED Free format text: FORMER NAME: BAUSCH + LOMB SURGICAL CO. |
|
| CP01 | Change in the name or title of a patent holder |
Address after: American New York Patentee after: Bausch & Lomb Incorporated Address before: American New York Patentee before: Bausch & Lomb Surgical Co. |
|
| CX01 | Expiry of patent term |
Granted publication date: 20040421 |
|
| CX01 | Expiry of patent term |