CN1175308A - 用于立体显示系统的跟踪系统 - Google Patents
用于立体显示系统的跟踪系统 Download PDFInfo
- Publication number
- CN1175308A CN1175308A CN95197588A CN95197588A CN1175308A CN 1175308 A CN1175308 A CN 1175308A CN 95197588 A CN95197588 A CN 95197588A CN 95197588 A CN95197588 A CN 95197588A CN 1175308 A CN1175308 A CN 1175308A
- Authority
- CN
- China
- Prior art keywords
- observer
- tracker
- light
- lens
- display system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


























Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/012—Head tracking input arrangements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0093—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for monitoring data relating to the user, e.g. head-tracking, eye-tracking
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B30/00—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images
- G02B30/20—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes
- G02B30/26—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes of the autostereoscopic type
- G02B30/27—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes of the autostereoscopic type involving lenticular arrays
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B30/00—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images
- G02B30/20—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes
- G02B30/26—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes of the autostereoscopic type
- G02B30/33—Optical systems or apparatus for producing three-dimensional [3D] effects, e.g. stereoscopic images by providing first and second parallax images to an observer's left and right eyes of the autostereoscopic type involving directional light or back-light sources
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/371—Image reproducers using viewer tracking for tracking viewers with different interocular distances; for tracking rotational head movements around the vertical axis
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/373—Image reproducers using viewer tracking for tracking forward-backward translational head movements, i.e. longitudinal movements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/376—Image reproducers using viewer tracking for tracking left-right translational head movements, i.e. lateral movements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/378—Image reproducers using viewer tracking for tracking rotational head movements around an axis perpendicular to the screen
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/38—Image reproducers using viewer tracking for tracking vertical translational head movements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/366—Image reproducers using viewer tracking
- H04N13/383—Image reproducers using viewer tracking for tracking with gaze detection, i.e. detecting the lines of sight of the viewer's eyes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/189—Recording image signals; Reproducing recorded image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/194—Transmission of image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/286—Image signal generators having separate monoscopic and stereoscopic modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/302—Image reproducers for viewing without the aid of special glasses, i.e. using autostereoscopic displays
- H04N13/305—Image reproducers for viewing without the aid of special glasses, i.e. using autostereoscopic displays using lenticular lenses, e.g. arrangements of cylindrical lenses
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/324—Colour aspects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/327—Calibration thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/349—Multi-view displays for displaying three or more geometrical viewpoints without viewer tracking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/361—Reproducing mixed stereoscopic images; Reproducing mixed monoscopic and stereoscopic images, e.g. a stereoscopic image overlay window on a monoscopic image background
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/363—Image reproducers using image projection screens
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/398—Synchronisation thereof; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
Abstract
一种用于跟踪自动立体显示系统中观察者的跟踪系统,该系统包括用于确定观察者头部和/或眼睛相对自动立体显示系统的位置的装置。自动立体显示系统可以提供一立体图像,该图像包括左右图像场,跟踪系统适于给图像场定位,从而至少基本上对应于观察者眼睛的位置。跟踪至少沿一个方向进行。
Description
本发明总体上涉及向观察者提供3维(3D)图像的立体显示系统。允许用肉眼观察3D图像的系统被称为“自动立体”显示系统。更具体地说,本发明涉及一种在这类系统中使用的跟踪系统。
存在两大类实用的自动立体3D显示系统。它们是多图像型显示和立体成对(stereo-pair)型显示。
这两种显示系统所依据的原理是,仅在特定空间位置上显示若干幅可观察的图像。结果是,观察者一次只能用一只眼睛来观察单幅的图像。也就是说,左眼看一幅图像,而右眼看另一幅图像。
在不同的系统之间,这些空间位置的定位和布局以及显示的方法都有很大不同。
多图像显示是将不同的图像交错在单个显示媒体中。然后,根据观察者眼睛与屏幕之间所成的不同观察角,将这些图像“解码”或“解密”,即根据观察者眼睛之间的水平位移,向每只眼睛显示不同的图像。
最简单的实行方式是采用这样的技术,如图24所示,该技术产生一个左-右图像的重复序列。每一连续图像之间的距离为65毫米,该距离等于观察者眼睛之间的平均距离。因此,位于A位置的观察者将看到正确排序的3D图像。
但是,如果观察者横向移动超过32毫米,或者位于B位置,那么右眼将看到左图像,而左眼将看到右图像,即观察者看见一个“逆反的3D”图像。逆反的3D图像看起来很不舒服,并且看一会儿后会使观察者疲劳,即头痛。在实践中,当一开始坐下观看这样的系统时,观察者很难判断是在观看一个正确的3D图像还是一个逆反的3D图像。直到感觉不舒服时,观察者才会意识到坐错了位置。
另外,观察者很难长时间保持正确的观察位置。
大多数的多图像自动立体系统都具有这一缺点,尤其是那些依赖于双凸透镜和栅型图像分离器(grid type image separator)的系统。
现在考虑一种对该系统的改进,以便显示多幅图像1、2、3、4,图像间隔为65毫米,从而如按图25,每个被显示的图像具有不同的“透视点”或“观察点”。
在一适当设计的系统中,可以这样来安排可观察的区域,使得对于B位置处的观察者,观察者的眼睛将看见1和2(即左眼看见图像1,右眼看见图像2)。但是,如果观察者向左移至A位置,那么观察者的眼睛将看见图像2和3。但是,由于图像2和3也显示出立体的不均等性(stereo disparity)(相互间),所以仍可看见正确的3D图像。同样,D位置处的观察者也将看到一3D图像。图像的模式不断重复1、2、3、4、1、2、3、4,所以在许多可视位置上都存在一熟悉的情形,从而使系统对多个观察者都正确。然而,产生一个问题。由于图像不断重复,所以如果观察器移至C位置,那么左眼将看见图像4,而右眼将看见图像1。这里的问题是,在生产视频媒体或其它媒体时,是把摄像机4置于摄像机1的右边。所以作为结果,当从该位置看图像时,颠倒了立体不均等性,并显示出逆反的3D图像。
通过引进一个空场或黑像场作为一幅图像(例如,如按图26,使图像4变成一个黑像场),便可明显地克服这一问题。通过确保在一模式与下一模式之间的交叉处,观察者的一只眼睛总是处于一空的区域,便可消除逆反3D图像的问题。当位于这些区域中的一个时,观察者仅用一只眼睛也仍能看见一幅图像,但只是一幅2D图像。该技术中不希望有的主要副面效应是,它在观察者位置C和D处,引进了2个区域,在这些区域中丧失了3D的效果,而原先只有一个区域丧失3D效果。这意味着,对于具有一个空像场的由3个投影机组成的系统来说,只能在50%的位置上看见3D图像。对于具有一个空像场的由4个投影机组成的系统来说,60%的位置是可视的。由此可见,为了使系统有效,需要大量视图。视图数量越多,显示效果越好。包含“交错”图像的图像数量范围一般为4-16。对于可接受的图像密度来说,八(8)似乎是实际最小值。图像可视位置之间的间隔不大于一只眼睛间隔(65毫米),并且通常要小一些(一般为该值的1/2)。
由几种方法可使图像“交错”和“解码”。它们的复杂程度、成本和性能都有很大不同。理想的编码器/解码器系统将是:
1)从任何垂直的角度可视
2)图像间有极为清晰的过渡
3)从任何距离可视
4)不使显示的图像劣化(由于色差或其它不希望有的光学特性)
5)图像模式必须重复。
尽管在理论上可以构成一个从任何距离都可观察的显示,但实际上所有这类显示都具有一预定的最佳观察距离。
最简单的系统是一种采用垂直取向形成一个栅的直线阵列。该系统可从任何垂直的角度进行观察,并且制造简单,价格不贵,但基本问题是图像间的过渡不清晰,并且由于吸收、散射或莫尔条纹总造成某些形式的图像劣化。
双凸透镜解决了图像过渡清晰度和上述图像劣化的问题,但不幸的是,引起了诸如色差和带反射等许多新的图像劣化。目前,对双凸透镜显示已存在大量的关注,并且几家大公司不顾该方法所固有的问题,正在积极推广它们的应用。
立体成对型显示只要求用两个分离的图像来生成立体图像。这导致了进行显示所需的信息量大大减少。由于它在图像摄像/录制、发射、编辑和生成领域中具有直接的经济和技术关联,所以倍受关注。
立体成对型显示可以看作是仅包含两幅图像的多图像显示。由于不同“视图”的数量有限,所以系统允许观察者移动的容限很低。确切的性能特点依赖于所用的光学原理,它们是栅、双凸阵列或后向反射镜的组合,以及“视图”是否重复,和/或是否将空像场(“黑视图”)插入模式中。
由于不同“视图”的数量有限,所以静态系统最多将仅在50%用于显示的可视区域中看见正确的3D图像,而其余的50%可视区域呈现逆反的3D图像,或者在使用空像场的系统中,只有33%的位置可看见正确的3D图像,而其余67%的位置只在单象模式下可视。
即便使用各种有效光学技术中最好的技术,观察者也被限制在横向观察能力为65毫米宽的视窗内,即为了保持正确3D图像的效果,观察者必须呆在离观察区中心32毫米的范围内。
解决上述限制观察者之问题的关键是,提供一种装置,使跟踪系统“知道”观察者的位置,并由此命令显示器移动被显示图像或“视图”的位置,致使它们总能与观察者眼睛的正确位置对应,即左眼总是看左图像,右眼总是看右图像。
鉴于此,本发明提供了一种跟踪系统,用于跟踪自动立体显示系统的观察者,它包括用于确定观察者的头和/或眼睛相对自动立体显示系统的位置的装置。
自动立体显示系统可以提供一个包括左右像场的立体图像,并且跟踪系统适应像场位置,从而至少基本上与观察者眼睛的位置对应。
这种系统的包含关系通过避免看见逆反的3D区域,使上述立体成对系统可行,并提高了多图像显示的性能。
可以用机械方式或电气方式控制“视图”图像的位置,并且所述控制依赖于所用立体成对型系统的类型。
尽管在大多数情况下只要求沿水平轴跟踪,但观察者的跟踪可以是一维、两维或三维的。
为了更好地理解本发明,请参考附图,其中说明了本发明的较佳实施例。
附图有:
图1(a)和(b)示出了依照本发明的一种跟踪系统的结构平面图,其中跟踪系统使用图像分析技术;
图2是一电路图,示出了依照本发明的一个阈电路;
图3(a)和(b)分别是依照本发明的跟踪系统的结构平面图,其中跟踪系统使用阴影屏技术(shadow screen technique);
图4是依照本发明的一种跟踪系统的结构简图,其中跟踪系统使用垂直条纹技术;
图5是人眼的示意图,示出了晶状体和视网膜;
图6是依照本发明使用单个摄像机的跟踪系统的第一种结构;
图7是依照本发明使用单个摄像机的跟踪系统的第二种结构;
图8是依照本发明使用两个摄像机的跟踪系统的第一种结构;
图9是依照本发明使用两个摄像机的跟踪系统的第二种结构;
图10是依照本发明使用偏振器的跟踪系统的结构图;
图11(a)和(b)是显示眼睛后向反射能力的示意图;
图12是依照本发明使用激光扫描技术的跟踪系统的第一种结构;
图13是依照本发明使用激光扫描技术的跟踪系统的第二种结构;
图14是依照本发明使用激光扫描技术的跟踪系统的第三种结构;
图15是依照本发明使用激光扫描技术的跟踪系统的第四种结构;
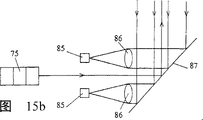
图16是依照本发明使用激光扫描技术的跟踪系统的第五种结构;
图17是依照本发明使用激光扫描技术的跟踪系统的第六种结构;
图18是一示意图,示出了依照本发明的图像分析技术的阶段;
图19-23是流程图,示出了依照本发明的图像分析技术的各个步骤;
图24-26是示意图,示出了多图像自动立体显示的工作原理。
有两种主要的跟踪观察者的方法。它们是:
1)跟踪观察者的头部
2)跟踪观察者的眼睛。
由于所需的参数是观察者眼睛的位置而不是观察者头部的位置,所以方法二是最希望用的。但是,寻找观察者头部位置要简单得多,然后可由该信息“预测”观察者眼睛的位置。
由于存在许多变化因素,所以根据头部跟踪原理工作的系统就每个具体的观察者对系统进行“用户微调”,从而多半会最有效地工作,即,随后系统预测观察者眼睛的位置,作为离开观察者头部轮廓的偏离。
有几种不同的技术可用来实现头部跟踪。它们包括基于图像分析的技术、回声定位或全息技术,以及阴影屏技术。
如果在一受控的环境中使用图像分析技术,那么可使这些技术很有效地工作,受控环境是指环境具有已知的背景或者稳定且受控的环境照明。最有效的情形之一(如图1(a)所示)是存在一个后向反射背景屏2,并具有一个红外照明源,诸如位于摄像机光轴附近的红外发光二极管(LED)阵列5。在该结构中,观察者1位于屏幕2之前。摄像机3具有透镜4,其光轴指向观察者1。红外LED 5位于透镜4附近,并向屏幕2和观察者1的方向发出光线8。在该情况下,不太需要对摄像机3进行复杂的光级控制,其中摄像机可以是CCD摄像机。简单调节孔径,以使后向反射屏2的曝光区出现100%白色(饱和)。于是,观察者1将作为一个黑的剪影映在白色背景上。然后,一相当简单的任务是用微处理器7提供的软件对观察者头部的顶部和两侧进行简单的定阈过程,以便确定头部的坐标。
图1(b)示出了一种对上述结构的变化,它可以在不用白炽灯的受控环境中良好地工作。该结构包含装有允许红外线通过的滤波器6的CCD摄像机3,以及位于摄像机3附近并面向观察者的红外LED阵列或其它红外光源5。在该情况下,重要的特性是,与周围环境相比,观察者的脸使红外线光高度反射。试验发现,即使是位于观察者至摄像机两倍距离处的无光的白色背景,也能充分反衬出被摄像者的脸,从而能够容易地从背景中辨别出来。用该方法产生的图像与用后向反射屏产生的图像之间的主要区别是,在该情况下,观察者的脸的图像将是映在黑色背景上的明亮的图像。
在上述的两种方法中,当给定充分反差比时,应该可以从视频信号中抽取必要的信息,并且其所用的电路被大大简化,成本也比基于常规图像分析的方法所需的数字帧存储/微计算机组合来得低。如图2所示,这种电路例如可以按照同步分离器9的原理工作,以便抽取水平和垂直的同步脉冲9a和9b。然后,在这些脉冲通过一模/数转换器或阈电路之后,由高速微处理器或微控制器7读取这些脉冲以及输入视频信号。于是,该信息应足以产生顶部、左边和右边的头部位置标记,不需要存储几个场的视频信息。
第二种方法是,根据显示器上若干不同的位置进行回声定位,并利用三角测量找出观察者头部的位置。基于3D显示器的每个角上有一个换能器的四个超声换能器的系统将如下工作,一个换能器用来发射脉冲,其余三个换能器用来接收该脉冲的回波。(从最近的物体)接收到的第一脉冲应来自观察者的鼻子。通过了解发送脉冲与每个传感器何时接收到脉冲之间的时间延迟,从而可以确定(从每个传感器)到物体的距离,并且用三角测量法确定该点在空间的位置。
然后,通过每个传感器轮流发射一脉冲并保持一运行平均值来重复该过程,以便提高系统的精确度。可以使用更复杂的算法以及不同数量和配置的换能器来确定多个点,而不仅是检测最近点。
另一方面,可以用声学全息技术来确定观察者头部的位置。凭借足够的分辨率,该技术可以用来确定观察者眼睛的位置。
阴影屏技术是许多可行技术中最简单最经济的技术之一。如图3a和3b所示,阴影屏可以用几种方法来配置。
在图3a所示的配置中,单个光源16(可以由红外线LED阵列组成)将编码或直射光线16a照射观察者1。然后,位于观察者1身后的光电探测器阵列15将接收到的光解码成“阻挡”或“通过”状态。
利用该方法,可以形成人体的剪影或“阴影”,并由给定的为各别观察者编写的规格或常规估计出他们眼睛的位置。
由于编码光线(即调制光线)允许在环境照明和可能发生的漫反射(使光线在观察者和屏幕之间行进的路径不是视线的直接线路)背景下作出较好的辨别,所以最好用编码光线,而不是简单的直接(静态)照明。
图3b中显示了系统的另一种配置。在该实施中,屏幕17由光源17a组成,并且使用了单个探测器18。该结构要比图3a所示的结构便宜,因为它只需要单个光探测器和放大器部分(它们一般比红外线LED要贵)。在该情况下,可以利用时间复用、调频或其它合适的调制/编码技术对光源进行调制,以允许探测器辨别出各个光源,并由此可以确定哪个光源被观察者挡住。
图4中显示了系统的另一种结构。在该实施中,红外光源121将一系列垂直条形的红外光线123投射观察者1和屏幕。红外探测器122接收来自场景的光线反射,并通过对红外光线条纹进行适时编码和调制,来确定观察者头部的位置。
与图1(b)中的一样,可以取消后向反射的背景120,并纯粹依靠来自观察者的脸部反射。
另一方面,系统使用可以不设反射屏幕,从而可以用观察垂直条纹变形并确定深度信息的摄像机监视来自观察者脸部的红外反射条纹。然后,利用这些等高线确定头部的位置。
如果垂直条纹相互太靠近,那么如果带扭曲(由于深度的差异)的程度大于条纹间距离的一半,就有可能发生重叠效应。为了避免该现象并仍然保持适当的分辨率,必须使条纹间隔加宽(但要均匀),然后将第一条纹的相对位置在连续帧中移动。该方法的一个负效应是采样速率降低。另一个潜在的问题是,系统容易检测到诸如反射光或其它明亮光源的强光,好象它们是垂直条纹。该问题可以通过使用差分分析技术来克服。
尽管价格便宜而且可靠,但用头部跟踪技术提高3D显示系统的基本问题是,要简单估计所需的信息(即观察者眼睛的位置),且由于系统不考虑观察者头部的旋转,所以观察者略微旋转他们的头便可使左眼移到右眼的位置(尤其当观察角较大时),反之亦然,如正常观察时可预见的那样。
由于这种情形造成3D感觉中100%的错觉,由此需要更直接的方法。
眼睛跟踪通过直接跟踪观察者的眼睛,克服了头部跟踪所遇到的问题。这可以通过许多装置但不同的方法来实现,最可行的两种方法是:
1)后向反射
2)图像分析。
根据后向反射的眼睛跟踪系统可证明是最稳定可靠的,因为它们受背景光水平变化的影响较小,并且不受阴影和其它类似光学干扰的影响。
后向反射眼睛跟踪系统主要根据“猫眼”原理,即如图5所示,眼睛20的特性是将光反射回它的发出点。这是由于晶状体22和视网膜21的结构所致。后向反射效应的程度受输入光强度、瞳孔面积以及来自视网膜21的漫反射量的影响。由于不同的眼睛生理学,动物(诸如猫和狗)的反射量乃至“猫眼”效应的有效性比人类的要大。理论上,应该可以获得如图6所示的结构简单的功能性系统,该系统被设计用来检测图像的最亮点,最亮点应是观察者的眼睛。但是,即使光源非常接近摄像机的光轴,后向反射程度也不会大于观察者面颊和鼻子正常的漫反射,来提供高度的可靠性。除了该问题之外,其它光源和来自诸如眼镜等反射体的强光将与观察者眼睛的后向反射点一样亮。为了这些和其它的原因,必须采用更成熟的方法。
图6所示的结构包含与一针孔透镜26耦连着的摄像机25。针孔透镜26的周围是红外线LED阵列27。为了使观察者眼睛的后向反射效应最大,选择该结构,使LED光源27尽可能地接近摄像机透镜26的光轴。摄像机的定位可使红外线LED发出的光照射到观察者的脸和眼睛。由此,来自摄像机25的视频输出包含了该图像。
在环境存在弱光并且观察者的眼镜或其它物体没有反射的条件下,发现对于将使用的简单的定阈技术,后向反射水平更充分。但是,在存在高强度背景光或者观察者眼镜或其它物体有反射的条件下,后向反射对面部或外来反射的比降低至简单解码处理可作分析的数值以下。
在这类情况下,必须使用差分分析技术,去除不需要的反射、背景和其它虚假的光照条件。
可用的最简单差分分析技术是,接通红外线LED光源时拍摄一个场,然后切断该光源再拍摄第二个场。然后,在计算机中对这两幅图像作减法,并对差值作进一步的分析。
该方法的问题是,当接通和切断红外线LED阵列时,由观察者脸部漫反射的平均光强将变化。图7示出了一种更好的结构,该结构具有两个LED阵列27和30,以便任何时候都只有一组LED是接通的。两个阵列都成圆形并同轴地围绕在摄像机透镜之光轴上。因此,当点亮阵列27时,摄像机25将接收到(来自发光表面的)直接反射、(来自无光表面的)漫反射以及(来自观察者眼睛的)后向反射的组合。当点亮阵列30时,摄像机间将只接收直接反射和无光反射。由此,通过对两幅图像作减法,可以从其它形式的反射中抽取出后向反射。
该方法的问题是,由于只能以场速率(即,对于PAL视频格式,为20毫秒/场)来拍摄图像,所以图像之间存在很大的时间上的转移,并由此如果观察者或摄像机发生较大的移动,那么两图像的相减将不能完全消除不希望有的反射。该问题可以通过同时拍摄两幅图像来克服。如图8和9所示,有几种光学结构可进行同时拍摄。
图8包含一对摄像机37和38,其中前表面反射镜将来自每一透镜的图像分成两半。摄像机中有一个装有成半圆形布置的红外线LED 47,红外线LED靠近该摄像机的光轴,例如图中所示的摄像机37。该基本结构工作如下:摄像机37除了接收无光反射和直接反射之外还将接收后向反射,而摄像机38将只接收无光反射和直接反射。由于没有沿其光轴照射摄像机38,所以摄像机38不会接收到后向反射。但是,与先前的例子不同,两幅图像是同时拍摄的,并且因此观察者或摄像机的移动不会影响这两幅图像。在该情况下,通过存储数字帧获取来自两个摄像机的视频信息,并通过计算机使用与上述类似的技术对视频信息进行分析。
用图9所示的结构可以获得类似的功能。在该情况下,通过使用窄通带干涉滤波器57和64以及波长略有不同的红外线LED光源59和60,将后向反射光与非后向反射光分离。该结构相对图8结构优越的地方在于,光路是相同的,这提高了图像减法处理的有效性。但是,应该注意,使用波长不同的光会因面部组织的配色等因素使图像亮度产生某些变化。
一个影响上述所有后向反射型眼睛跟踪系统的主要问题是光源的直接反射(通常来自观察者所带的眼镜片或眼镜的金属架)。
尽管(由于有两组同轴的红外线LED)在图7和图9所用的减法过程中可以明显消除这些虚假的高亮点,但是这种亮点消除常常会消除来自观察者眼睛的后向反射光,成为负面效应(由于消除了后向反射中存在的实际接触瞳孔的角膜反射)。如图10所示,通过使用正交对准的偏振器可以明显克服在上述所有结构中的上述问题。已经发现,直接反射会保持入射光的偏振角,而无光反射和(来自视网膜)的后向反射会使输入光去偏振。因此,如果使发射光在某一平面内起偏并且为该摄像机(或多个摄像机)配备偏振方向与该平面正交的偏振器,那么直接反射将被阻挡,而摄像机将接收到无光反射和后向反射。
为光源和检测器添加偏振器的方法可以应用于上述任何技术。由此,利用这些技术,可以获得一种后向反射型眼睛跟踪系统,该系统能够抽取相当地低于光学噪声的后向反射信号,并且也不受观察者和摄像机移动的影响。
但是,这带给我们一个新的问题,我们将其描述为瞳孔收缩现象。为了说明这一现象,我们必须首先解释眼睛中产生后向反射的机理。
由上述可见,使用后向反射技术可以有效地确定眼睛的位置,但是根据应用情况这些技术可以会有问题。上述讨论中未被涉及的一个主要问题是,眼睛对其后向反射具有生理学的影响。
正常眼睛工作时,任何入射眼睛的亮光都会引起瞳孔收缩。在自动立体显示中,亮光可以来自入射每只眼睛的明亮的图像或者来自明亮的环境照明。当光强增大时,瞳孔收缩并且眼睛的后向反射变得不易检测。
图11(a)和(b)示出了瞳孔收缩影响入眼后向反射率的机理。如图11(a)所示,当瞳孔放大时,大部分的入射光33被允许进入眼睛20。然后,晶状体将该光线聚焦至视网膜21上的一点。然后,晶状体22将来自视网膜21的漫反射再次聚焦成一束具有光强的平行光32。如图11(b)所示,在瞳孔收缩的情况下,较少的入射光33被允许进入眼睛,形成有效的入射光34,这样从焦点返回晶状体的光强明显减小。由此,除了返程光线32的光束直径较小之外,其光强也比前一种情况(即图11(a))小得多。
前述所有的基于红外线LED的眼睛跟踪系统都受到瞳孔收缩现象影响,这使它们在较强的背景光线条件下不再可靠。但是,再参照上述关于眼睛后向反射的例子,如果可以保证在所有条件下进入眼睛的光(34)的强度都相等,那么瞳孔收缩将不会影响返程光束的强度,而只会影响返程光束的直径。在该情况下,无论瞳孔大小为多少,后向反射率都将相同。
如果系统不使用基于红外线LED的漫射光模式,而使用建立在扫描激光束周围的光源,并且假使所用激光束的直径小于观察者眼睛的瞳孔直径,那么这样的情形就会出现。在其最简化的结构中,这样的系统可以如图12所示来实现,图中示出了激光器收发机模块105、旋转反射镜装置75,以及旋转或摆动反射镜装置80。
通过使旋转反射镜阵列75与可移动反射镜80适当同步,以类似于电视技术中所用的“飞点扫描器”的方式使光束反复扫描观察者的脸。还可用其它技术使光束扫描观察者的脸,诸如安装在音圈组件上的反射镜或多个反射镜,或者使用微型反射镜技术(如美国Texas仪器公司生产的)。
激光器装置105包含调制激光器107和一个或多个光学探测器106。如果通过使用透镜使探测器准直并使其略微偏离光轴以便反射镜上灰尘的反射光不会使出射的激光束被错误地检测为返程光束,那么就可以获得最佳性能。
通过调制激光光源,消除背景光的影响,可以获得益处。但是,由于图像探测器(可能是PIN或雪崩二极管)的连续特性(逐点),现在可以在逐一像素(逐点)或逐行的基础上调制光源,从而克服系统对观察者或扫描系统移动的敏感性。由于观察者的瞳孔直径可以非常小(可能为2毫米),所以认为按像素逐一调制光束比基于行的调制要好,因为遗失间隔的扫描行会漏失或忽略瞳孔。建议使用激光束的正弦波或三角波形调制,因为这将允许在图像解码方面有效地使用常规的同步解调技术。
如在上述基于LED的系统中,通过将正交偏振滤波器放在探测器前面使用,可以消除直接反射。激光系统间的唯一区别在于许多半导体激光器模块已经产生一平面偏振光束,并且由此系统通过组合实际上总体的敏感性并未降低。
图12中所示结构的问题是,根据激光器107的光轴与探测器模块106之间的位移,要求初级光束偏转器75非常大。图13、14和15中所示的系统的其它结构通过把探测器的镜片78和79移到初级光束偏转器的光路以外从而大大缩小整个系统的大小,克服了这一问题。
在这些例子中,已用诸如线性CCD阵列等基于行的探测器装置85替代了单个探测器元件,每次激光束扫描后将读出所述基于行的探测器装置。还可以通过使用如图16所示的略有不同的光学结构,来使用诸如常规CCD摄像机110的常规的全场型扫描设备。在该结构中,扫描系统利用诸如双轴音圈驱动器或其它偏转系统等单个反射镜装置112沿两个轴进行扫描。
图17示出了该点发散系统的实用装置。在该情况下,光学装置包含一双轴棱镜扫描系统,后面是一投影透镜。装有针孔透镜128的常规CCD摄像机127对来自被摄物的的返程光进行探测。该系统相对早期系统的主要优点之一是探测系统简单,并且探测器的光轴可以与出射光束的光轴非常接近,出射光束与探测器返程光束之间没有串扰的危险。由于组合后的光路中没有反射镜和/或其它光学元件,所以这是可能的。
系统工作如下。与上述系统一样,用(装有偏振器121的)激光器120产生准直光束,在该情况中,准直光束入射到一对旋转的正方形或多边形棱镜124和125上。棱镜的取向使得它们的旋转轴互为90度。由于折射性能,棱镜使激光束扫描一矩形区,致使出射光束总是平行于入射棱镜的光束。然后,如图所示,该平行的扫描光束经过投影镜片。这些镜片将水平和垂直位移转换成(偏离透镜光轴的)角位移。
根据透镜的光学特性,所得到的扫描光束将会聚在探测透镜128前的焦点上。这时,光束直径将只有几毫米数量级,并且由此可以将探测摄像机127的透镜128放置得非常靠近投影系统的光轴。任何早期的扫描系统都不可能做到这一点,因为水平和垂直平面上的光束会聚有两个不同的点。对激光束光轴的接近大大提高了后向反射与正常漫反射之间的比率(后向反射率),从而提高了系统的有效性。
如果用一已知频率的正弦波对光源进行振幅调制,那么可以改进激光技术。由于只有来自调制光束的反射光将受该已知频率调制,所以可以用常规的相干解调技术在光探测器输出端探测代表视网膜之后向反射的信号。
在本发明中,可以使用上述扫描和探测技术的任何组合,以便根据应用情况确定眼睛的位置。
这些跟踪系统可以单个或成对使用,以便改进工作,它们具有以下优点:
1)通过使用深度信息,对假亮度作额外的鉴别。
2)提供有关观察者离开显示器距离的空间数据。
3)消除因观察者距离不正确所引起的位置误差-这可以通过对两幅图像的空间坐标简单取平均来克服。
4)提供将投影图像聚焦到观察者眼中的附加信息。
图像分析
阶段A
图像分析方法是所有眼睛跟踪系统中最成熟的一种。与基于后向反射的系统一样,它使用装有一红外线滤过器的摄像机。之所以选择红外线频谱,是因为它使皮肤颜色对光的反射程度的影响降低。摄像机与数字帧存储器和微处理器电路板相连。
微处理器分析视频信息,并首先识别观察者头部的位置,然后是观察者眼睛的位置。微处理器进行这项工作基于对面部特征和结构的一般认识,而不依赖于任何特定观察者的特征。
如图18所示,分析在两个主要阶段进行。阶段A-图18(a)(b)和阶段B-图18(c)。分析的第一阶段是找出观察者头部的位置。这很重要,因为这大大减小了搜寻观察者眼睛的面积。通过屏蔽掉存在误差背景信息的区域,获得两个优点,首先提高了分析的帧速率(即加快了分析速度),其次提高了分析的精度。
图18示出了确定观察者头部位置所包含的基本处理步骤。应该注意,该阶段分析的基本机理是减法运算器的原理。该运算器的目的是求出前景(有观察者的图像)与背景(没有观察者的图像)之间的差,从而从背景中提取出观察者的图像。该所得到的信息不能直接在任何以后的分析阶段中使用,因为它已与原始的前景图像不同,但如图18(b)所示,它有助于为分析的第二阶段提供必要的边界。
由于分析的第一阶段并不用来确定眼睛的实际坐标,所以精度要求不高,并且由此分析到达的分辨率相当低,仅为75*70(水平*垂直点)。由此可见,在分析的主体中,第一步骤是以较低的分辨率(75*70)读取一个场。然后,将该场从一(分辨率相同的)背景阵列中减去。随后,将该差值信息与一可接受的偏离阈值逐点比较。如果差值位于该区域之外,那么该点被视为“热”,即该区域内的前景与背景不同。如果差值落在该区域内,那么该点被视为“冷”。
然后,用“热”点确定头部顶部、左边和右边的标记,忽略“冷”点,即用所遇到的最“热”点设定顶部标记,用最左边“热”点设定最左边的标记,而用最右边的“热”点设定最右边的标记。
还要记录下分析每一帧时所遇“热”点的总数。将该“热”点总数与一阈值比较。为了使头部位置分析有效,并且为了将暂时的头部跟踪标记连续地复制到工作标记中,“热”点的数量必须至少与该阈值一样多。如果不能满足这一情况,那么头部-跟踪搜寻将被视为“冷”,眼睛-跟踪搜寻将不再进行,并且保持原先的眼睛位置。
由头部-跟踪程序的主循环可见,为了能够进行正确的处理,系统必须具有可靠的背景图像(即没有观察者的图像)。这由程序中两个不同的部分来处理。第一部分是初始化部分。它只在启动时执行一次,并显示在图20中。在初始化期间,由微处理器电路板改变摄像机的增益,直至平均视频电平位于规定的范围中。必须保证图像中有足够的反差,以便进行正确的分析。应该注意,不可能简单地使用摄像机上的自动可变光阑或自动光线亮度,因为当观察者步入摄像机的取景器时,总的光线亮度会改变,从而使摄像机的增益变化,导致背景看起来与所摄取的图像不同。如果在摄像机增益已增大至最大值以后图像仍然太暗,那么微处理器将接通一组红外线LED来照亮观察者的脸,然后再次开始摄像机增益设置过程。
尽管这一简单过程的运行令人满意,但是它没有考虑到背景光亮度慢变化的可能性,例如历经几个小时的时间,尤其是自然光所引起的变化。这种情形由“δ”程序来处理,它是程序主循环的一部分。该程序观察连续场之间图像内的移动。通过该分析,可以确定观察者是否站在摄像机前(即使他们站着不动,也能检测到微弱的移动)。利用该移动检测并结合“眼睛锁定”有效性标志(以后讨论)和定时器,可使系统重新摄取背景。为此,必须满足以下判据。
1)有效的眼睛锁定标志必须清零(即,非眼睛锁定)
2)δ运算器必须表明没有移动
3)条件(1)和(2)必须满足5秒钟。
当所有这三个判据都满足时,检查摄像机的平均光亮度,并且如果该平均光亮度与初始化阶段设定的完全不同,那么再次检查摄像机的增益和红外线的照明。此后,再次拍摄背景并将其取代(RAM中保持的)现有的背景阵列。
阶段B
如图21所示,这一阶段的分析确定观察者眼睛的位置。该程序中的基础假设是,观察者的眼睛要比周围的面部组织暗。这是一个可靠的假设,因为虹膜和视网膜只反射少量的红外线。即使存在该情形,自然也不能保证图像的其余部分不是同样的暗,例如头发、鼻孔和嘴等。一个主要的判别特征是眼睛应该为暗,而周围为亮。
分析的第一步骤当然是把视频信息从帧存储器中读取到计算机中。当用该信息来确定观察者眼睛的位置时,它所要求分辨率要比程序头部跟踪部分所必须的高。在该情况下,尽管使用略微更高的分辨率可能更有利,但这里使用了分辨率150*140(水平点和垂直点)。
这里应该注意,在所有情况下,帧取样器使用全分辨率(600*280),并且对诸像素平均即每个分析像素代表对一个8像素组(4*2组)的平均。该平均有助于降低噪声对视频信号的影响,并使结果略有改进。但是,对于生产级别机器,会降低这一特性,而更注重降低成本(通过降低系统中帧取样器部件的存储器要求)。
应该注意,以高分辨率从帧取样器中读取的视频信息来自于这样的视频场,该视频场与在分析的头部跟踪阶段中以低分辨率读取的信息所来自的视频场相同。
分析的第二步骤是,确定黑色阈电平。该电平通过对眼睛跟踪区(眼睛跟踪所搜寻的区域)内像素的分析计算而得。在现有软件的状况下,通过搜寻所有像素寻找最小电平和最大电平来计算该电平。然后,将黑色电平取作这些极值之间的中点,但在将来可以采用其它更好的过程。
分析的第三步骤是检测暗区。首先通过比较视频电平和黑色阈电平逐点进行检测。如果前景像素比该电平暗,则认为该像素是有效的,反之,认为无效并忽略。
与眼睛跟踪技术相关的一个最大的问题是,会误测到黑发,并形成单个较大的区域。已经发现,许多这样的问题可以通过从观察者的图像中修去头发的图像来解决。因为眼睛跟踪区落在观察者头部轮廓内并由此切割到发丝,所以这是可能的。由此,于是按条简单地修正到头发,从眼睛跟踪窗的边缘开始直至相邻的像素不再是有效的(即足够暗)。尽管可以在眼睛跟踪区的所有周边(不包括底边)上实行这样的修剪程序,但是发现,与简单使用单一修剪程序(从眼睛跟踪区域的顶部开始读取垂直条纹)相比,这种方法没有产生更好的结果,并且在某些情况下产生的结果更差。在这些情况中,造成失败的原因是观察者的眉毛碰到了他们的发丝,并且由此水平修剪程序去掉了一部分或全部的观察者眼睛的图像,因为错误地假设了发丝是连续的。因此,使用单一的修剪程序。
修剪过程结束后,分析眼睛跟踪区中的剩余的像素,并如前所述将其分成“有效的”或“无效的”。然后,将“有效”像素标记为有效的,并将其放在有效阵列中,供区域搜寻程序使用。
在下一步骤中,区域搜寻程序对有效阵列扫描有效像素。然后,用区域搜寻程序把这些像素分成组。
区域搜寻程序(如图22简单所示)返回一张它已找到的目标(区域)的信息表。目前,该信息由最左边x坐标、最右边x坐标、最上面y坐标、最下面y坐标和像素区域面积组成。
“有效”目标的产生有若干限制。其中一些是:
1)面积
2)宽度
3)纵横比。
如果以下条件中的任何一条发生,那么目标被视为无效并忽略之。
a)面积太大(目标可能是经过修剪程序的一丛头发,或者可能是阴影),
b)目标宽度为1(这可能是一根头发),
c)纵横比大于2∶1(高∶宽),由于眼睛的纵横比几乎不大于1∶1,所以这表示目标可能不是眼睛。
然后,将满足所有这些要求的目标排成一列,供下一阶段的分析使用。
分析的下一个阶段是“过滤”。在该阶段中,首先对单一目标其次对成对目标进行测试,从而从虚假目标和成对目标中区分出有效的一对眼睛。
图23示出了过滤部分,该部分本质上是分级的,它通过用第一判据所得的面积对目标分级。它们从最大至最小被存储在一张表内,然后根据以后的几何和相互关系测试,逐渐从表中除去。过滤在性能上是“自适应的”,因为它在几个动态可变的限制或要求等级上工作。过滤程序利用最严格的测试开始工作,然后如果没有找到有效的眼睛对,则减少对测试的限制,并且用新的一组要求对目标重新测试。如果没有找到有效的眼睛对,那么测试限制进一步减少,并再对目标进行测试。该模式一直继续到遇到最小限制的情况。如果这时还未找到有效眼睛对,那么将眼睛锁定标志清零,并且保持原先的眼睛位置。
该过滤过程的第一阶段是,将目标从最大至最小分类。然后,将表中的最大目标选作“A”目标,并将“A”目标从当前表中去除。然后,将该当前表复制到第二表中。于是,第二表的第一项(即最大目标)被检查作为可能的“B”目标,并对其进行一系列的检查。目前,需检查以下各项:
1)触及(优先级3)
2)形状(优先级2)
3)角度(优先级1)
在接触测试中,检查目标边缘是否触及眼睛跟踪窗。这是一个重要的测试,因为眼睛跟踪窗经常与观察者发丝相交,它会产生一个小的孤立区,一次又一次地通过修正程序。但是,不可能简单地忽略所有触及眼睛跟踪窗的目标,因为有效的眼睛区域经常是这样的。该判据具有最低的优先级,并且如果通过判断否决了所有的目标对,那么测试将重新开始,不使用判据。应该注意,只有眼睛跟踪窗的底边和侧边用该方式测试。眼睛跟踪窗的顶边不需要进行检查,因为修正程序沿该边开始检查,并且几乎能够保证在程序执行后该顶边是清晰的。
下一个检查(优先级2)是目标的纵横比。尽管在分析的较早阶段已检查了纵横比,但是,较早情况的纵横比阈值为2∶1。在该情况下,检查纵横比是否为较低(更接近正方)的数值3∶2(高∶宽)。如果目标的纵横比大于该数值,那么否决该目标。应该注意,不能将该判据简单地安排在纵横比的早期测试中,因为眼睛跟踪窗的侧边经常会切触目标,从而目标的纵横比会表现得比其实际值大。在该等级上设置此较严格的形状判据不会产生问题,因为如果它否决了有效的眼睛区域,那么系统会在下一次通过过滤程序循环时自动放弃该测试判据。
在每一种情况下,对“B”设置点的整个表检查每一等级的过滤,如果必要,通过放弃优先级3和2而结束。一旦找到有效“B”点,就对“A-B”对检查角度。在该检查中,计算穿过这两点的直线与水平线之间的夹角。如果该角度大于一预定值,那么否决“B”,并且继续寻找新的“B”点。角度检查的主要目的是,避免与观察者眼睛相关的目标与例如它们的鼻孔或嘴聚集,或者在极端情况下,眼睛与(同一眼睛的)眉毛成对。在过滤过程中这是最高优先级,但与其它的一样,如果通过判断否决了所有的“A-B”对,则将走旁路。
一旦找到有效的“A-B”对,则眼睛锁定被认为有效,并且设置相关的眼睛锁定标志。
为清晰化起见,图23示出了用直线式程序编写的过滤程序。应该注意,程序可以用不同的方式完成,以便提高精密性。
如图23中所示,将眼睛的位置计算成离开头部跟踪标记的相对偏离,由此即使观察者移动了,也能丢失眼睛锁定并仍然保持眼睛位置,因为眼睛位置将根据最后得知的离开头部跟踪标志的偏离来进行估计。但是,如果丢失了头部锁定,那么因为不能确定眼睛跟踪窗,所以眼睛锁定就会自动丢失。
程序中眼睛跟踪部分的辅助自适应功能允许系统改变头部跟踪标记的顶部与眼睛跟踪区顶部之间的垂直偏离,从而使系统在处理具有不同发长和发型的观察者时通用性更好。所谓的“跟踪”程序使用眼睛跟踪区中心与最后有效眼睛对的垂直位置之间的相对偏移,以便改变垂直偏移的程度。该调节或“跟踪”只有在眼睛锁定有效时才进行。如果眼睛锁定丢失,那么眼睛跟踪窗将慢慢地返回到中心位置。该方法的理由是,如果眼睛锁定丢失,则可能是因为眼睛跟踪窗已移动得太远,不再包围观察者的眼睛(如果观察者非常快地上下点头,就会发生这种情况)。这种自我对中心的方法允许系统在该情况下再次获得锁定。
应该注意,为了看到3D图像,许多立体显示系统要求观察者定位在离开显示设备一固定距离的地方。可以对上述单个摄像机及光探测器系统进行改进,使用两个摄像机或光探测器,以便每个都接受场景中略有不同的景象。通过比较两个摄像机或光探测器输出的观察者位置的差,可以计算观察者至显示设备的距离,并相应地作出反应。
尽管描述中使用了红外线光源,但也可设想在所述的技术中使用其它的光源。
Claims (67)
1.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括用于确定观察者头部和/或眼睛相对于自动立体显示系统位置的装置。
2.如权利要求1所述的跟踪系统,其特征在于,自动立体显示系统提供了一种包含左右图像场的立体图像,跟踪系统适于对图像场定位,以便至少基本上对应于观察者眼睛的位置。
3.如权利要求1或2所述的跟踪系统,其特征在于,跟踪至少沿一个方向。
4.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一背景屏,
(b)一摄像机,它包含一个具有光轴的透镜,
(c)一光源,位于透镜光轴的附近,和
(d)用于处理来自摄像机的信号的装置。
其中当观察者位于背景屏之前并且光源照射观察者和背景屏时,摄像机观察到一幅图像,该图像将观察者作为剪影显示在背景屏上,处理装置给剪影边界定位,从而确定观察者头部的位置。
5.如权利要求4所述的跟踪系统,其特征在于,背景屏是一后向反射屏。
6.如权利要求4或5所述的跟踪系统,其特征在于,光源发射红外线光。
7.如权利要求6所述的跟踪系统,其特征在于,光源包括一红外线LED阵列。
8.如权利要求6或7所述的跟踪系统,其特征在于,红外线滤过器位于摄像机透镜的之前。
9.如权利要求4至8中任何一种所述的跟踪系统,其特征在于,处理装置包括一用于处理来自摄像机的信号的处理电路,该电路包括一用于分离信号之水平和垂直同步脉冲的同步分离器,以及用于读取同步脉冲从而确定剪影边界位置的控制装置。
10.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一背景屏;一摄像机,包含一个具有光轴的透镜;以及一光源,位于透镜光轴的附近,方法包括将观察者定位在背景屏前,并用光源发出的光照射观察者和背景屏,致使摄像机观察到观察者作为剪影显示在背景屏上,并且将剪影的边界定位从而确定观察者头部的位置。
11.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,至少包括两个相隔一定距离的用于向观察者发射声脉冲的超声换能器,还包括用于处理从每个换能器接收到的信号的处理装置,每个换能器分别发射一个所述的声信号,其余的换能器接受经观察者反射后的信号,处理装置处理从换能器得到的信号,从而确定观察者头部和/或眼睛的位置。
12.如权利要求11所述的跟踪系统,其特征在于,配备了四个所述超声换能器。
13.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统至少包括两个相隔一定距离的用于向观察者发射声脉冲的超声换能器,方法分别包括由每个所述换能器发射一个信号并用其余的所述换能器接收经观察者反射后的信号,每个换能器提供一个结果电信号,并且处理该结果电信号从而确定观察者头部的位置。
14.如权利要求13所述的方法,其特征在于,用三角测量法的装置处理信号。
15.如权利要求13所述的方法,其特征在于,用声学全息法的装置处理信号。
16.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一背景屏,提供了一个光电探测器阵列,和
(b)一光源,用于照射背景屏,
其中当观察者位于背景屏之前并且光源照射观察者和背景屏时,观察者将一阴影投射到屏幕上,阻挡了一部分阵列的光,从而确定观察者头部的位置。
17.如权利要求16所述的跟踪系统,其特征在于,光源发射红外线光。
18.如权利要求17所述的跟踪系统,其特征在于,光源是一红外线LED阵列。
19.如权利要求17所述的跟踪系统,其特征在于,光源发射经编码的光。
20.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一背景屏,它提供了一个光电探测器阵列;和一光源,用于照射背景屏,方法包括将观察者定位在背景屏之前,照射背景屏和观察者,致使观察者的阴影落在光电探测器阵列上,从而确定观察者头部的位置。
21.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一背景屏,提供了一个光源阵列,和
(b)一光电探测器,用于检测光源阵列发出的光,
其中当观察者位于背景屏之前时,观察者挡住了一部分光源阵列所发出的光,光电探测器接收未被阻挡的光源阵列部分所发出的光,从而确定观察者头部的位置。
22.如权利要求21所述的跟踪系统,其特征在于,光源发射经编码的光。
23.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一背景屏,它提供了一个光源阵列;和一光电探测器,用于检测光源阵列发出的光,方法包括将观察者定位在背景屏之前,观察者挡住一部分光源阵列所发出的光,并且由光电探测器接收未被阻挡的光源阵列部分所发出的光,从而确定观察者头部的位置。
24.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一背景屏,
(b)一光源,其发射的光具有多个平行条纹,
(c)一光探测器,和
(d)一处理装置,
其中当观察者位于背景屏之前并且平行条纹投射到观察者和背景屏上时,光探测器接收平行条纹的反射,并且处理装置根据发射光的参数确定观察者头部的位置。
25.如权利要求24所述的跟踪系统,其特征在于,光源发射垂直条纹的红外线光。
26.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一背景屏;一光源,其发射的光具有多个平行条纹;和一光探测器,方法包括将观察者定位在背景屏之前,发射平行条纹的光,由光探测器接收条纹光的反射,并且根据平行条纹的参数确定观察者头部的位置。
27.如权利要求26所述的方法,其特征在于,光源发射垂直条纹的红外线光。
28.如权利要求26或27所述的方法,其特征在于,参数包括对条纹的时间编码和调制。
29.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一光源,其发射的光具有多个平行条纹,
(b)一光探测器,和
(c)一处理装置,
其中当观察者位于该光源之前时,处理装置通过观察反射条纹的扭曲确定观察者头部的位置。
30.如权利要求29所述的跟踪系统,其特征在于,光源发射垂直条纹的红外线光。
31.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一光源,其发射的光具有多个平行条纹;和一光探测器,方法包括将红外线条纹光投射到观察者上,并且确定观察者头部的位置,作为反射光条纹扭曲的函数。
32.如权利要求21所述的方法,其特征在于,光源发射垂直条纹的红外线光。
33.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:(a)一摄像机,它与一透镜耦合,和(b)一光源,位于透镜附近,其中当观察者位于摄像机之前时,光从光源射向观察者,并且摄像机接收由观察者的眼睛所反射的光,从而确定观察者眼睛的位置。
34.如权利要求33所述的跟踪系统,其特征在于,透镜为一针孔透镜。
35.如权利要求33或34所述的跟踪系统,其特征在于,光源是一个围绕在透镜周围的红外线光源。
36.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一摄像机,它具有一透镜,
(b)第一光源,位于透镜附近,
(c)第二光源,与透镜相距一段距离,和
(d)处理装置,用于处理来自摄像机的信号,
其中当观察者处在与透镜光轴成一直线的观察者位置上时,第一和第二光源都独立发光,由第二光源发出的光被反射作为来自观察者位置的无光反射和直接反射,并且由第一光源发出的光也被反射作为来自观察者位置的无光反射和直接反射并进一步被反射作为来自观察者眼睛的后向反射,由此当第一和第二光源照射观察者时,处理装置确定反射光之间的差异,从而确定观察者眼睛的位置。
37.如权利要求36所述的跟踪系统,其特征在于,透镜为一针孔透镜。
38.如权利要求36或37所述的跟踪系统,其特征在于,光源发射红外线光。
39.如权利要求3 8所述的跟踪系统,其特征在于,第一和第二光源分别由一圆形的红外线LED阵列提供,该阵列至少基本上关于透镜光轴同轴。
40.一种当观察者位于观察者位置时用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一摄像机,它具有一面向观察者位置的透镜;第一光源,位于透镜附近;和第二光源,与透镜相距一段距离,方法包括从第一光源向观察者发射光,来自第一光源的光被反射作为来自观察者位置的无光反射和直接反射并进一步被反射作为来自观察者眼睛的后向反射,从第二光源向观察者发射光,由第二光源发出的光被反射作为来自观察者位置的无光反射和直接反射,并且当第一和第二光源分别照射观察者时,确定由观察者发射的光之间的差异,从而给观察者眼睛定位。
41.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)第一摄像机,它具有第一透镜,
(b)一光源,位于第一透镜的光轴附近,
(c)第二摄像机,它具有第二透镜,第二摄像机位于第一摄像机附近,用光源发出的光照射观察者,第二摄像机接收来自观察者的无光反射和直接反射,并且第一摄像机接收来自观察者的无光发反射和直接反射并进一步接收来自观察者眼睛的后向反射。
42.如权利要求41所述的跟踪系统,其特征在于,还包括一分束装置,用于将每个透镜接收的图像分束,并且光源位于透镜中某一个透镜的光轴附近。
43.如权利要求42所述的跟踪系统,其特征在于,光源是一个红外线LED阵列,在某一个透镜的光轴周围成半圆形布置。
44.如权利要求41所述的跟踪系统,其特征在于,还包括光学带通滤波器,并且第一和第二光源发射波长不同的光。
45.如权利要求44所述的跟踪系统,其特征在于,由LED阵列提供第一和第二光源。
46.如权利要求45所述的跟踪系统,其特征在于,第一和第二光源分别由圆形的LED阵列提供,圆形LED阵列至少基本上关于某一个透镜的光轴同轴。
47.如权利要求41所述的跟踪系统,其特征在于,包括光偏振装置,位于光源之前。
48.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括第一摄像机,它具有第一透镜;一光源,位于第一透镜的光轴附近;和第二摄像机,它具有第二透镜,第二摄像机位于第一摄像机附近,第二透镜的光轴相对第一透镜的光轴有角度位移,方法包括:将第一摄像机指向观察者,同时在第一和第二摄像机中接收由观察者反射的光,从而第一摄像机进一步接收由观察者眼睛反射的光,并且确定由第一和第二摄像机接收到的反射光之间的差异,从而确定观察者眼睛的位置。
49.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一摄像机,它具有一透镜,
(b)一光源,和
(c)光偏振装置,它们分别位于摄像机和光源的前面,
由此观察者将偏振光反射到摄像机。
50.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一激光器装置,用于发射激光束,
(b)一旋转反射镜装置,
(c)一可旋转的反射镜装置,和
(d)光探测装置,
其中旋转反射镜装置将激光束反射到摆动反射镜装置,激光束基本上扫描整个观察者,并且由光探测装置接收经观察者反射的激光束,从而将来自观察者眼睛的反射定位,并由此确定观察者眼睛的位置。
51.如权利要求50所述的跟踪系统,其特征在于,还包括一正交对准的偏振器,它位于光探测器的前面。
52.如权利要求50或51所述的跟踪系统,其特征在于,包括一透镜,它位于光探测器的前面。
53.如权利要求50至52中任何一条所述的跟踪系统,其特征在于,旋转反射镜装置包括一初级旋转多面反射镜,每个反射镜相邻镜面之间的角度被改变,以便镜面反射激光束,从而在第一平面内扫描。
54.如权利要求51所述的跟踪系统,其特征在于,可旋转反射镜装置包括第二可移动反射镜或反射镜组,可使激光束在垂直于第一平面的第二平面内扫描。
55.如权利要求50所述的跟踪系统,其特征在于,光探测器包括基于行的探测装置。
56.如权利要求50所述的跟踪系统,其特征在于,光探测器包括一个CCD摄像机。
57.一种用于跟踪自动立体显示系统中观察者的跟踪系统,其特征在于,包括:
(a)一摄像机,它具有一透镜,
(b)一激光器装置,用于发射激光束,和
(c)一双轴偏转装置,用于使激光束沿两根轴偏转,
其中激光束扫描观察者,并且由摄像机接收经观察者反射的激光束,从而将来自观察者眼睛的后向反射定位,并由此确定观察者眼睛的位置。
58.如权利要求57所述的跟踪系统,其特征在于,透镜是一针孔透镜。
59.如权利要求57或58所述的跟踪系统,其特征在于,偏转装置是一个双轴音圈驱动器。
60.如权利要求57或58所述的跟踪系统,其特征在于,偏转装置包括第一和第二旋转棱镜装置,并且扫描激光束通过投影透镜,将激光束的扫描图案会聚到投影透镜的焦点上,摄像机透镜位于其焦点的附近。
61.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一跟踪系统,跟踪系统包括一用于发射激光束的装置,激光束偏转装置和光探测装置,方法包括:用偏转装置使激光束偏转,将激光束扫描观察者,用光探测装置接收由观察者反射的激光束,并且将来自观察者眼睛的反射激光束定位,从而确定观察者眼睛的位置。
62.如权利要求60所述的方法,其特征在于,包括在第一平面和垂直于所述第一平面的第二平面内偏转激光束。
63.一种用于跟踪自动立体显示系统中观察者的方法,其特征在于,自动立体显示系统具有一显示系统,显示系统包括一摄像机,一用于存储摄像机提供的视频场的存储装置,以及用于处理被存储视频场的处理装置,方法包括:
a)比较背景之所述视频场与位于背景前观察者之所述视频场的差异,从而定位该观察者头部,
b)处理在其眼睛跟踪区内观察者的视频场,以便搜寻其中相对地暗的目标,
c)根据预定的判据鉴定每个目标,从而选择出可能是观察者眼睛的目标。
64.如权利要求63所述的方法,其特征在于,在眼睛跟踪区的顶部进行修正过程,从而从被处理的眼睛跟踪区中去除观察者的发丝。
65.一种自动立体显示系统,其特征在于,包括多个投影机,每个投影机将不同的图像投影在一个显示媒体上,从而提供多个相邻的图像场,其中一幅图像场为空场,它没有图像,与所述多个相邻的图像场连续。
66.如权利要求65所述的显示系统,其特征在于,显示媒体是栅型图像分离器上的一个双凸透镜阵列。
67.一种显示装置,其特征在于,它包括两个如权利要求1所述的跟踪系统。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AUPN0038 | 1994-12-13 | ||
| AUPN0038A AUPN003894A0 (en) | 1994-12-13 | 1994-12-13 | Head tracking system for stereoscopic display apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1175308A true CN1175308A (zh) | 1998-03-04 |
Family
ID=3784545
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95197588A Pending CN1175308A (zh) | 1994-12-13 | 1995-12-13 | 用于立体显示系统的跟踪系统 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6163336A (zh) |
| EP (1) | EP0797784B1 (zh) |
| JP (1) | JPH10510686A (zh) |
| CN (1) | CN1175308A (zh) |
| AU (1) | AUPN003894A0 (zh) |
| CA (1) | CA2207793A1 (zh) |
| WO (1) | WO1996018925A1 (zh) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1973555B (zh) * | 2004-06-24 | 2010-05-05 | 索尼爱立信移动通讯有限公司 | 接近辅助3d再现 |
| CN101347003B (zh) * | 2005-12-22 | 2010-08-11 | 视瑞尔技术公司 | 在显示装置上多重模式呈现视频全息图的图像内容的方法以及多重模式显示装置 |
| CN102045577A (zh) * | 2010-09-27 | 2011-05-04 | 昆山龙腾光电有限公司 | 用于三维立体显示的观察者跟踪系统及三维立体显示系统 |
| CN102822848A (zh) * | 2010-01-07 | 2012-12-12 | 3维开关有限公司 | 对用于立体视觉的眼镜进行识别的设备和方法以及控制立体视觉视频流的显示的相关方法 |
| CN102906627A (zh) * | 2010-05-21 | 2013-01-30 | 皇家飞利浦电子股份有限公司 | 多视图显示设备 |
| CN103402106A (zh) * | 2013-07-25 | 2013-11-20 | 青岛海信电器股份有限公司 | 三维图像显示方法及装置 |
| CN103581654A (zh) * | 2012-07-30 | 2014-02-12 | 联想(北京)有限公司 | 一种信息处理方法 |
| CN103984068A (zh) * | 2014-06-03 | 2014-08-13 | 苏州洛合镭信光电科技有限公司 | Qfn封装的宽带高速传输的并行光收发组件 |
| CN101828102B (zh) * | 2007-10-16 | 2014-12-17 | 皇家飞利浦电子股份有限公司 | 用于生成和集成小型照明方案的设备、系统和方法 |
| CN104503092A (zh) * | 2014-11-28 | 2015-04-08 | 深圳市亿思达科技集团有限公司 | 不同角度和距离自适应的三维显示方法及设备 |
| CN106292240A (zh) * | 2016-09-05 | 2017-01-04 | 京东方科技集团股份有限公司 | 全息显示装置及其显示方法 |
| CN106325033A (zh) * | 2016-08-22 | 2017-01-11 | 京东方科技集团股份有限公司 | 全息显示装置 |
| CN106394883A (zh) * | 2015-07-08 | 2017-02-15 | 霍尼韦尔国际公司 | 使用受控光源技术在自由空间中的准确的目标探测 |
| CN106599656A (zh) * | 2016-11-28 | 2017-04-26 | 深圳超多维科技有限公司 | 显示方法、装置及电子设备 |
| CN108302822A (zh) * | 2015-08-06 | 2018-07-20 | 艾迪森微电网公司 | 定日镜阵列强度和偏振跟踪 |
| CN110574099A (zh) * | 2017-05-01 | 2019-12-13 | 纯深度股份有限公司 | 基于头部跟踪的场序跳视分离减少 |
| CN112414310A (zh) * | 2020-11-13 | 2021-02-26 | 浙江汉振智能技术有限公司 | 三维激光跟踪测距装置及方法 |
| CN113325572A (zh) * | 2021-05-27 | 2021-08-31 | 京东方科技集团股份有限公司 | 可穿戴显示设备及注视点的位置的确定方法 |
| CN115220240A (zh) * | 2021-04-19 | 2022-10-21 | 幻景启动股份有限公司 | 适应眼睛位置的立体影像数据的产生方法与显示系统 |
Families Citing this family (113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AUPN003894A0 (en) * | 1994-12-13 | 1995-01-12 | Xenotech Research Pty Ltd | Head tracking system for stereoscopic display apparatus |
| GB2296152B (en) * | 1994-12-13 | 1999-07-07 | Gec Marconi Avionics Holdings | An autostereoscopic display |
| GB2306826A (en) * | 1995-10-18 | 1997-05-07 | Sharp Kk | Display, method of calibrating an observer tracking display and observer tracking autostereoscopic 3D display |
| AUPO024696A0 (en) * | 1996-06-04 | 1996-06-27 | Xenotech Research Pty Ltd | Video display system |
| JP3751368B2 (ja) * | 1996-06-28 | 2006-03-01 | 沖電気工業株式会社 | 虹彩認識システムおよび虹彩認識装置 |
| US6108005A (en) * | 1996-08-30 | 2000-08-22 | Space Corporation | Method for producing a synthesized stereoscopic image |
| US6535241B1 (en) * | 1996-11-13 | 2003-03-18 | Fakespace Labs, Inc. | Multi-person stereo display system |
| JPH10268231A (ja) * | 1997-03-26 | 1998-10-09 | Philips Japan Ltd | 立体画像表示装置 |
| GB2324428A (en) * | 1997-04-17 | 1998-10-21 | Sharp Kk | Image tracking; observer tracking stereoscopic display |
| AUPP048097A0 (en) * | 1997-11-21 | 1997-12-18 | Xenotech Research Pty Ltd | Eye tracking apparatus |
| AU1890699A (en) * | 1998-01-16 | 1999-08-02 | Nikon Corporation | Exposure method and lithography system, exposure apparatus and method of producing the apparatus, and method of producing device |
| US20010008561A1 (en) | 1999-08-10 | 2001-07-19 | Paul George V. | Real-time object tracking system |
| US7036094B1 (en) | 1998-08-10 | 2006-04-25 | Cybernet Systems Corporation | Behavior recognition system |
| US7121946B2 (en) * | 1998-08-10 | 2006-10-17 | Cybernet Systems Corporation | Real-time head tracking system for computer games and other applications |
| GB2341231A (en) * | 1998-09-05 | 2000-03-08 | Sharp Kk | Face detection in an image |
| US6757422B1 (en) * | 1998-11-12 | 2004-06-29 | Canon Kabushiki Kaisha | Viewpoint position detection apparatus and method, and stereoscopic image display system |
| BR9917384A (pt) * | 1999-06-18 | 2002-03-26 | Swisscom Mobile Ag | Sistema e processo para a transmissão e representação de dados de vìdeo e instalação adequada para isso |
| US7050606B2 (en) * | 1999-08-10 | 2006-05-23 | Cybernet Systems Corporation | Tracking and gesture recognition system particularly suited to vehicular control applications |
| US7236622B2 (en) * | 1999-08-25 | 2007-06-26 | Eastman Kodak Company | Method for forming a depth image |
| US7928955B1 (en) * | 2000-03-13 | 2011-04-19 | Intel Corporation | Automatic brightness control for displays |
| US20080024598A1 (en) * | 2000-07-21 | 2008-01-31 | New York University | Autostereoscopic display |
| JP3659144B2 (ja) | 2000-08-25 | 2005-06-15 | トヨタ自動車株式会社 | 入力画面の制御装置 |
| DE10044032A1 (de) * | 2000-09-06 | 2002-03-14 | Deutsche Telekom Ag | 3-D Sehen |
| US6543899B2 (en) * | 2000-12-05 | 2003-04-08 | Eastman Kodak Company | Auto-stereoscopic viewing system using mounted projection |
| US7111939B2 (en) * | 2001-01-22 | 2006-09-26 | Eastman Kodak Company | Image display system with body position compensation |
| US6752498B2 (en) | 2001-05-14 | 2004-06-22 | Eastman Kodak Company | Adaptive autostereoscopic display system |
| GB0128983D0 (en) * | 2001-12-04 | 2002-01-23 | Koninkl Philips Electronics Nv | Directional image dislay |
| DE10204430A1 (de) | 2002-02-04 | 2003-08-07 | Zeiss Carl | Stereo-Mikroskopieverfahren und Stereo-Mikroskopiesystem |
| CA2476612A1 (en) * | 2002-02-27 | 2003-09-04 | Geo-Rae Co., Ltd. | Method and system for displaying stereoscopic image |
| JP4147054B2 (ja) * | 2002-05-17 | 2008-09-10 | オリンパス株式会社 | 立体観察装置 |
| US7907150B2 (en) * | 2003-08-09 | 2011-03-15 | Doubleshot, Inc. | Method of fusion or merging imagery data for improved visual perception using monoscopic and stereographic fusion and retinal decay techniques |
| US20050207486A1 (en) * | 2004-03-18 | 2005-09-22 | Sony Corporation | Three dimensional acquisition and visualization system for personal electronic devices |
| WO2005119376A2 (en) | 2004-06-01 | 2005-12-15 | Vesely Michael A | Horizontal perspective display |
| US20060109202A1 (en) * | 2004-11-22 | 2006-05-25 | Alden Ray M | Multiple program and 3D display and 3D camera apparatus and process |
| FR2873459A1 (fr) * | 2004-07-23 | 2006-01-27 | Franck Andre Marie Guigan | Dispositif optique a reseau lenticulaire |
| FR2873457A1 (fr) * | 2004-07-23 | 2006-01-27 | Franck Andre Marie Guigan | Dispositif optique a reseau lenticulaire |
| KR100624431B1 (ko) | 2004-08-03 | 2006-09-19 | 삼성전자주식회사 | 입체영상 관찰을 위한 주시거리 조정 방법 및 그 장치 |
| US9030532B2 (en) * | 2004-08-19 | 2015-05-12 | Microsoft Technology Licensing, Llc | Stereoscopic image display |
| US20060152580A1 (en) * | 2005-01-07 | 2006-07-13 | Synthosys, Llc | Auto-stereoscopic volumetric imaging system and method |
| RU2322771C2 (ru) * | 2005-04-25 | 2008-04-20 | Святослав Иванович АРСЕНИЧ | Стереопроекционная система |
| US20060250391A1 (en) * | 2005-05-09 | 2006-11-09 | Vesely Michael A | Three dimensional horizontal perspective workstation |
| US8717423B2 (en) * | 2005-05-09 | 2014-05-06 | Zspace, Inc. | Modifying perspective of stereoscopic images based on changes in user viewpoint |
| US20070091037A1 (en) * | 2005-10-21 | 2007-04-26 | Yee-Chun Lee | Energy Efficient Compact Display For Mobile Device |
| US7679041B2 (en) * | 2006-02-13 | 2010-03-16 | Ge Inspection Technologies, Lp | Electronic imaging device with photosensor arrays |
| US20080159551A1 (en) * | 2006-12-28 | 2008-07-03 | Texas Instruments Incorporated | System and Method for Acoustic Echo Removal (AER) |
| US8077964B2 (en) * | 2007-03-19 | 2011-12-13 | Sony Corporation | Two dimensional/three dimensional digital information acquisition and display device |
| KR101350475B1 (ko) * | 2007-04-12 | 2014-01-15 | 삼성전자주식회사 | 고효율 2차원/3차원 겸용 영상 표시장치 |
| US7938540B2 (en) * | 2008-07-21 | 2011-05-10 | Disney Enterprises, Inc. | Autostereoscopic projection system |
| US20100107184A1 (en) * | 2008-10-23 | 2010-04-29 | Peter Rae Shintani | TV with eye detection |
| US8488243B2 (en) * | 2008-10-27 | 2013-07-16 | Realid Inc. | Head-tracking enhanced stereo glasses |
| DE102009001202B3 (de) * | 2009-02-26 | 2010-09-09 | Seereal Technologies S.A. | Kamerasystem mit Augenfinder-Modulen |
| US8199186B2 (en) | 2009-03-05 | 2012-06-12 | Microsoft Corporation | Three-dimensional (3D) imaging based on motionparallax |
| US8284234B2 (en) * | 2009-03-20 | 2012-10-09 | Absolute Imaging LLC | Endoscopic imaging using reflection holographic optical element for autostereoscopic 3-D viewing |
| US8314832B2 (en) | 2009-04-01 | 2012-11-20 | Microsoft Corporation | Systems and methods for generating stereoscopic images |
| US11450113B1 (en) | 2009-06-04 | 2022-09-20 | Masoud Vaziri | Method and apparatus for a wearable computer |
| US11367164B1 (en) | 2009-06-04 | 2022-06-21 | Masoud Vaziri | Method and apparatus for super resolution imaging and eye tracking devices |
| US8872910B1 (en) | 2009-06-04 | 2014-10-28 | Masoud Vaziri | Method and apparatus for a compact and high resolution eye-view recorder |
| US10064552B1 (en) | 2009-06-04 | 2018-09-04 | Masoud Vaziri | Method and apparatus for a compact and high resolution mind-view communicator |
| US7948515B1 (en) * | 2009-06-05 | 2011-05-24 | Hines Stephen P | Mini 3-D camera rig |
| US8564534B2 (en) | 2009-10-07 | 2013-10-22 | Microsoft Corporation | Human tracking system |
| US7961910B2 (en) | 2009-10-07 | 2011-06-14 | Microsoft Corporation | Systems and methods for tracking a model |
| US8867820B2 (en) | 2009-10-07 | 2014-10-21 | Microsoft Corporation | Systems and methods for removing a background of an image |
| US8963829B2 (en) | 2009-10-07 | 2015-02-24 | Microsoft Corporation | Methods and systems for determining and tracking extremities of a target |
| WO2011060561A2 (en) * | 2009-11-17 | 2011-05-26 | Eth Zurich | Transparent autostereoscopic image display apparatus and method |
| US8717360B2 (en) * | 2010-01-29 | 2014-05-06 | Zspace, Inc. | Presenting a view within a three dimensional scene |
| JP5499854B2 (ja) | 2010-04-08 | 2014-05-21 | ソニー株式会社 | 頭部装着型ディスプレイにおける光学的位置調整方法 |
| US8878773B1 (en) * | 2010-05-24 | 2014-11-04 | Amazon Technologies, Inc. | Determining relative motion as input |
| JP4875762B2 (ja) * | 2010-05-26 | 2012-02-15 | シャープ株式会社 | 画像処理装置、画像表示装置および画像撮像装置 |
| KR101699922B1 (ko) | 2010-08-12 | 2017-01-25 | 삼성전자주식회사 | 하이브리드 사용자 추적 센서를 이용한 디스플레이 시스템 및 방법 |
| CN102004256B (zh) * | 2010-09-09 | 2012-07-04 | 北京航空航天大学 | 基于空间谱全息存储的激光干涉测距系统 |
| EP2486441B1 (en) * | 2010-10-07 | 2018-02-21 | Sony Interactive Entertainment Inc. | 3-d glasses with camera based head tracking |
| US8830329B2 (en) * | 2010-10-07 | 2014-09-09 | Sony Computer Entertainment Inc. | 3-D glasses with camera based head tracking |
| GB2484919A (en) * | 2010-10-25 | 2012-05-02 | Cambridge Silicon Radio | Directional display device arranged to display visual content toward a viewer |
| US20120098931A1 (en) * | 2010-10-26 | 2012-04-26 | Sony Corporation | 3d motion picture adaption system |
| US9354718B2 (en) * | 2010-12-22 | 2016-05-31 | Zspace, Inc. | Tightly coupled interactive stereo display |
| US8879830B2 (en) | 2011-01-18 | 2014-11-04 | Hisense Hiview Tech Co., Ltd. | Control method and apparatus for stereoscopic display |
| US8786529B1 (en) | 2011-05-18 | 2014-07-22 | Zspace, Inc. | Liquid crystal variable drive voltage |
| US8885882B1 (en) | 2011-07-14 | 2014-11-11 | The Research Foundation For The State University Of New York | Real time eye tracking for human computer interaction |
| US9102269B2 (en) | 2011-08-09 | 2015-08-11 | Continental Automotive Systems, Inc. | Field of view matching video display system |
| US20130093752A1 (en) * | 2011-10-13 | 2013-04-18 | Sharp Laboratories Of America, Inc. | Viewer reactive auto stereoscopic display |
| US20130100243A1 (en) * | 2011-10-20 | 2013-04-25 | Broadcom Corporation | Secure Stereoscopic Display |
| KR101920646B1 (ko) * | 2011-12-15 | 2018-11-22 | 한국전자통신연구원 | 시각인식 기반의 프로그래시브 비디오 스트리밍 장치 및 방법 |
| US20130271575A1 (en) * | 2012-04-11 | 2013-10-17 | Zspace, Inc. | Dynamically Controlling an Imaging Microscopy System |
| US9584797B2 (en) | 2012-10-31 | 2017-02-28 | Elwha Llc | Systems and methods to confirm that an autostereoscopic display is accurately aimed |
| KR20140063272A (ko) * | 2012-11-16 | 2014-05-27 | 엘지전자 주식회사 | 영상표시장치, 및 그 동작방법 |
| US9265458B2 (en) | 2012-12-04 | 2016-02-23 | Sync-Think, Inc. | Application of smooth pursuit cognitive testing paradigms to clinical drug development |
| TWI516093B (zh) * | 2012-12-22 | 2016-01-01 | 財團法人工業技術研究院 | 影像互動系統、手指位置的偵測方法、立體顯示系統以及立體顯示器的控制方法 |
| JP2014127999A (ja) * | 2012-12-27 | 2014-07-07 | Toshiba Corp | 顔検出装置 |
| US11004337B2 (en) | 2012-12-28 | 2021-05-11 | Balu Subramanya | Advanced parking management system |
| US20140210646A1 (en) * | 2012-12-28 | 2014-07-31 | Balu Subramanya | Advanced parking and intersection management system |
| US9380976B2 (en) | 2013-03-11 | 2016-07-05 | Sync-Think, Inc. | Optical neuroinformatics |
| US9094576B1 (en) | 2013-03-12 | 2015-07-28 | Amazon Technologies, Inc. | Rendered audiovisual communication |
| CN103248905A (zh) * | 2013-03-22 | 2013-08-14 | 深圳市云立方信息科技有限公司 | 一种模仿全息3d场景的显示装置和视觉显示方法 |
| US10228561B2 (en) | 2013-06-25 | 2019-03-12 | Microsoft Technology Licensing, Llc | Eye-tracking system using a freeform prism and gaze-detection light |
| US9625723B2 (en) | 2013-06-25 | 2017-04-18 | Microsoft Technology Licensing, Llc | Eye-tracking system using a freeform prism |
| US9736467B2 (en) * | 2013-08-05 | 2017-08-15 | Samsung Display Co., Ltd. | Apparatus and method for adjusting stereoscopic images in response to head roll |
| TWI508526B (zh) * | 2013-10-01 | 2015-11-11 | Wistron Corp | 產生視角平移影像之方法及其可攜式電子設備 |
| US20150169046A1 (en) * | 2013-12-13 | 2015-06-18 | Honeywell International Inc. | Line scan camera eye tracking system and method |
| US9720506B2 (en) * | 2014-01-14 | 2017-08-01 | Microsoft Technology Licensing, Llc | 3D silhouette sensing system |
| TWI556624B (zh) * | 2014-07-18 | 2016-11-01 | 友達光電股份有限公司 | 影像顯示方法以及影像顯示裝置 |
| CN104460019B (zh) * | 2014-12-11 | 2017-04-12 | 合肥鑫晟光电科技有限公司 | 三维显示设备以及三维显示方法 |
| WO2016154711A1 (en) * | 2015-03-31 | 2016-10-06 | Cae Inc. | Multifactor eye position identification in a display system |
| US20160292919A1 (en) | 2015-03-31 | 2016-10-06 | Cae Inc. | Modular Infrastructure For An Interactive Computer Program |
| US9754506B2 (en) | 2015-03-31 | 2017-09-05 | Cae Inc. | Interactive computer program with virtualized participant |
| JP6454368B2 (ja) * | 2017-03-15 | 2019-01-16 | 株式会社Subaru | 車両の表示システム及び車両の表示システムの制御方法 |
| CN114815287A (zh) * | 2017-08-23 | 2022-07-29 | 交互数字麦迪逊专利控股公司 | 用于生成投影3d光场的光场图像引擎方法和装置 |
| JP7278277B2 (ja) | 2017-11-02 | 2023-05-19 | ピーシーエムエス ホールディングス インコーポレイテッド | ライトフィールドディスプレイにおける開口拡大のための方法およびシステム |
| CN108399613B (zh) * | 2017-12-20 | 2020-08-14 | 上海奕瑞光电子科技股份有限公司 | 一种平板探测器图像空场识别方法 |
| US11917121B2 (en) | 2019-06-28 | 2024-02-27 | Interdigital Madison Patent Holdings, Sas | Optical method and system for light field (LF) displays based on tunable liquid crystal (LC) diffusers |
| CN114365026A (zh) * | 2019-07-01 | 2022-04-15 | Pcms控股公司 | 用于基于光束转向对3d显示器进行连续校准的方法和系统 |
| JP2023508342A (ja) * | 2019-12-19 | 2023-03-02 | エーワイイースリーディー・インコーポレイテッド | 立体視画像を見せるための方法およびディスプレイシステム |
| CN113013781B (zh) * | 2021-02-05 | 2022-04-01 | 安阳一都网络科技有限公司 | 基于图像处理的激光发射及动态校准装置、方法、设备和介质 |
| US11800244B1 (en) | 2022-08-13 | 2023-10-24 | Mojtaba Vaziri | Method and apparatus for an imaging device |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2727429A (en) * | 1953-11-30 | 1955-12-20 | Will F Jenkins | Apparatus for the production of composite photographic effects |
| GB1563188A (en) * | 1975-10-17 | 1980-03-19 | Perisic Z | Optical method and apparatus for carrying out the method |
| GB2041562B (en) * | 1978-12-21 | 1983-09-01 | Redifon Simulation Ltd | Visual display apparatus |
| GB2041563B (en) * | 1979-01-11 | 1983-08-17 | Redifon Simulation Ltd | Visual display apparatus |
| US4649425A (en) * | 1983-07-25 | 1987-03-10 | Pund Marvin L | Stereoscopic display |
| DE3407686C1 (de) * | 1984-03-02 | 1985-07-11 | Drägerwerk AG, 2400 Lübeck | Messgeraet fuer Gase mittels eines Indikatorbandes |
| JPS6318213A (ja) * | 1986-07-11 | 1988-01-26 | Hamamatsu Photonics Kk | ステレオ画像を用いた距離計測装置 |
| JPS63121387A (ja) * | 1986-11-10 | 1988-05-25 | A T R Tsushin Syst Kenkyusho:Kk | 立体画像表示装置 |
| GB8701288D0 (en) * | 1987-01-21 | 1987-02-25 | Waldern J D | Perception of computer-generated imagery |
| US4987487A (en) * | 1988-08-12 | 1991-01-22 | Nippon Telegraph And Telephone Corporation | Method of stereoscopic images display which compensates electronically for viewer head movement |
| US5086354A (en) * | 1989-02-27 | 1992-02-04 | Bass Robert E | Three dimensional optical viewing system |
| US5223925A (en) * | 1990-10-28 | 1993-06-29 | Tomohiko Hattori | Autostereoscopic system |
| US5024521A (en) * | 1990-11-19 | 1991-06-18 | Larry Zuchowski | Autostereoscopic presentation system |
| GB2259213A (en) * | 1991-08-29 | 1993-03-03 | British Aerospace | Variable resolution view-tracking display |
| US5189452A (en) * | 1991-12-09 | 1993-02-23 | General Electric Company | Real image projection system |
| US5329323A (en) * | 1992-03-25 | 1994-07-12 | Kevin Biles | Apparatus and method for producing 3-dimensional images |
| US5311220A (en) * | 1992-06-10 | 1994-05-10 | Dimension Technologies, Inc. | Autostereoscopic display |
| IL102370A (en) * | 1992-06-30 | 1995-03-30 | Yissum Res Dev Co | Process for modifying particulate solids and particulate solids prepared thereby |
| US5349379A (en) * | 1992-09-09 | 1994-09-20 | Dimension Technologies Inc. | Autostereoscopic display illumination system allowing viewing zones to follow the observer's head |
| EP0659324B1 (en) * | 1992-09-09 | 2000-04-12 | EICHENLAUB, Jesse B. | Stroboscopic illumination system for video displays |
| US5320538A (en) * | 1992-09-23 | 1994-06-14 | Hughes Training, Inc. | Interactive aircraft training system and method |
| JP3311832B2 (ja) * | 1992-10-14 | 2002-08-05 | テルモ株式会社 | 立体画像表示装置 |
| US5394202A (en) * | 1993-01-14 | 1995-02-28 | Sun Microsystems, Inc. | Method and apparatus for generating high resolution 3D images in a head tracked stereo display system |
| US5712732A (en) * | 1993-03-03 | 1998-01-27 | Street; Graham Stewart Brandon | Autostereoscopic image display adjustable for observer location and distance |
| DE4312918A1 (de) * | 1993-04-14 | 1994-10-20 | Hertz Inst Heinrich | Wiedergabeeinrichtung |
| CA2162036A1 (en) * | 1993-05-04 | 1994-11-10 | Angus Duncan Richards | Stereoscopic display unit |
| JPH08163603A (ja) * | 1994-08-05 | 1996-06-21 | Tomohiko Hattori | 立体映像表示装置 |
| US5483308A (en) * | 1994-08-30 | 1996-01-09 | Youngker; Ray | Apparatus and method for displaying floor, ceiling, and wall coverings |
| AUPN003894A0 (en) * | 1994-12-13 | 1995-01-12 | Xenotech Research Pty Ltd | Head tracking system for stereoscopic display apparatus |
| US5956180A (en) * | 1996-12-31 | 1999-09-21 | Bass; Robert | Optical viewing system for asynchronous overlaid images |
-
1994
- 1994-12-13 AU AUPN0038A patent/AUPN003894A0/en not_active Abandoned
-
1995
- 1995-12-13 JP JP8517950A patent/JPH10510686A/ja not_active Ceased
- 1995-12-13 WO PCT/AU1995/000843 patent/WO1996018925A1/en active IP Right Grant
- 1995-12-13 EP EP95941539A patent/EP0797784B1/en not_active Expired - Lifetime
- 1995-12-13 CA CA002207793A patent/CA2207793A1/en not_active Abandoned
- 1995-12-13 US US08/849,777 patent/US6163336A/en not_active Expired - Fee Related
- 1995-12-13 CN CN95197588A patent/CN1175308A/zh active Pending
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1973555B (zh) * | 2004-06-24 | 2010-05-05 | 索尼爱立信移动通讯有限公司 | 接近辅助3d再现 |
| CN101347003B (zh) * | 2005-12-22 | 2010-08-11 | 视瑞尔技术公司 | 在显示装置上多重模式呈现视频全息图的图像内容的方法以及多重模式显示装置 |
| CN101828102B (zh) * | 2007-10-16 | 2014-12-17 | 皇家飞利浦电子股份有限公司 | 用于生成和集成小型照明方案的设备、系统和方法 |
| CN102822848A (zh) * | 2010-01-07 | 2012-12-12 | 3维开关有限公司 | 对用于立体视觉的眼镜进行识别的设备和方法以及控制立体视觉视频流的显示的相关方法 |
| CN102906627A (zh) * | 2010-05-21 | 2013-01-30 | 皇家飞利浦电子股份有限公司 | 多视图显示设备 |
| CN102045577B (zh) * | 2010-09-27 | 2013-03-27 | 昆山龙腾光电有限公司 | 用于三维立体显示的观察者跟踪系统及三维立体显示系统 |
| CN102045577A (zh) * | 2010-09-27 | 2011-05-04 | 昆山龙腾光电有限公司 | 用于三维立体显示的观察者跟踪系统及三维立体显示系统 |
| CN103581654A (zh) * | 2012-07-30 | 2014-02-12 | 联想(北京)有限公司 | 一种信息处理方法 |
| CN103402106A (zh) * | 2013-07-25 | 2013-11-20 | 青岛海信电器股份有限公司 | 三维图像显示方法及装置 |
| CN103984068A (zh) * | 2014-06-03 | 2014-08-13 | 苏州洛合镭信光电科技有限公司 | Qfn封装的宽带高速传输的并行光收发组件 |
| CN104503092B (zh) * | 2014-11-28 | 2018-04-10 | 深圳市魔眼科技有限公司 | 不同角度和距离自适应的三维显示方法及设备 |
| CN104503092A (zh) * | 2014-11-28 | 2015-04-08 | 深圳市亿思达科技集团有限公司 | 不同角度和距离自适应的三维显示方法及设备 |
| CN106394883A (zh) * | 2015-07-08 | 2017-02-15 | 霍尼韦尔国际公司 | 使用受控光源技术在自由空间中的准确的目标探测 |
| CN108302822B (zh) * | 2015-08-06 | 2020-07-31 | 艾迪森微电网公司 | 定日镜阵列强度和偏振跟踪 |
| CN108302822A (zh) * | 2015-08-06 | 2018-07-20 | 艾迪森微电网公司 | 定日镜阵列强度和偏振跟踪 |
| CN106325033A (zh) * | 2016-08-22 | 2017-01-11 | 京东方科技集团股份有限公司 | 全息显示装置 |
| US10365607B2 (en) | 2016-08-22 | 2019-07-30 | Boe Technology Group Co., Ltd. | Hologram display device |
| CN106292240A (zh) * | 2016-09-05 | 2017-01-04 | 京东方科技集团股份有限公司 | 全息显示装置及其显示方法 |
| CN106599656A (zh) * | 2016-11-28 | 2017-04-26 | 深圳超多维科技有限公司 | 显示方法、装置及电子设备 |
| CN110574099A (zh) * | 2017-05-01 | 2019-12-13 | 纯深度股份有限公司 | 基于头部跟踪的场序跳视分离减少 |
| CN110574099B (zh) * | 2017-05-01 | 2022-07-12 | 安波福技术有限公司 | 基于头部跟踪的场序跳视分离减少 |
| CN112414310A (zh) * | 2020-11-13 | 2021-02-26 | 浙江汉振智能技术有限公司 | 三维激光跟踪测距装置及方法 |
| CN115220240A (zh) * | 2021-04-19 | 2022-10-21 | 幻景启动股份有限公司 | 适应眼睛位置的立体影像数据的产生方法与显示系统 |
| CN115220240B (zh) * | 2021-04-19 | 2023-11-21 | 幻景启动股份有限公司 | 适应眼睛位置的立体影像数据的产生方法与显示系统 |
| CN113325572A (zh) * | 2021-05-27 | 2021-08-31 | 京东方科技集团股份有限公司 | 可穿戴显示设备及注视点的位置的确定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10510686A (ja) | 1998-10-13 |
| EP0797784A1 (en) | 1997-10-01 |
| EP0797784B1 (en) | 2003-07-30 |
| WO1996018925A1 (en) | 1996-06-20 |
| US6163336A (en) | 2000-12-19 |
| CA2207793A1 (en) | 1996-06-20 |
| AUPN003894A0 (en) | 1995-01-12 |
| EP0797784A4 (en) | 1999-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1175308A (zh) | 用于立体显示系统的跟踪系统 | |
| CN1101056C (zh) | 生成距景物距离的图象的方法和装置 | |
| US10747314B1 (en) | Tracking system with infrared camera | |
| US7562985B2 (en) | Mirror assembly with integrated display device | |
| KR102082702B1 (ko) | 레이저 영상표시장치 | |
| US6496218B2 (en) | Stereoscopic image display apparatus for detecting viewpoint and forming stereoscopic image while following up viewpoint position | |
| US6674893B1 (en) | Three-dimensional shape measuring apparatus | |
| CN1844852A (zh) | 生成景物的混合图象的方法 | |
| CN1735789A (zh) | 测距设备 | |
| CN108718406B (zh) | 一种可变焦3d深度相机及其成像方法 | |
| CN1192316A (zh) | 立体成象自动聚焦、测距以及影象测量 | |
| CN1290355A (zh) | 全向成象装置 | |
| CN1742294A (zh) | 制作包含深度信息的图像的方法和装置 | |
| CN106226895B (zh) | 一种带反馈的旋转全内反射显微方法及装置 | |
| US9170471B2 (en) | Optical system having integrated illumination and imaging optical systems, and 3D image acquisition apparatus including the optical system | |
| CN205539525U (zh) | 一种摄像头自动查找系统 | |
| ATE203879T1 (de) | System und verfahren zur abtastung des augenhintergrundes | |
| JP3818028B2 (ja) | 3次元画像撮像装置および3次元画像撮像方法 | |
| CN104914651B (zh) | 投影镜头 | |
| JP2004110804A (ja) | 3次元画像撮影装置及び方法 | |
| CN213091888U (zh) | 深度测量系统及电子设备 | |
| CN110196232B (zh) | 一种共焦成像装置及共焦成像方法 | |
| US20030071121A1 (en) | Optical data collection device with a combined targeting and focusing apparatus | |
| CN110703560A (zh) | 一种直接投影式一屏多眼独立显示技术 | |
| AU713400B2 (en) | Tracking system for stereoscopic display systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |