CN115555703A - 一种双摆头式五轴联动激光加工机床以及加工方法 - Google Patents
一种双摆头式五轴联动激光加工机床以及加工方法 Download PDFInfo
- Publication number
- CN115555703A CN115555703A CN202211228300.6A CN202211228300A CN115555703A CN 115555703 A CN115555703 A CN 115555703A CN 202211228300 A CN202211228300 A CN 202211228300A CN 115555703 A CN115555703 A CN 115555703A
- Authority
- CN
- China
- Prior art keywords
- clamping
- rod
- arc
- rotating
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000003672 processing method Methods 0.000 title claims abstract description 10
- 238000000034 method Methods 0.000 claims abstract description 23
- 230000000694 effects Effects 0.000 claims abstract description 7
- 230000033001 locomotion Effects 0.000 claims description 12
- 244000309464 bull Species 0.000 claims description 9
- 238000013459 approach Methods 0.000 claims description 8
- 238000003754 machining Methods 0.000 claims description 7
- 230000005540 biological transmission Effects 0.000 claims description 3
- 238000006243 chemical reaction Methods 0.000 claims description 3
- 239000007858 starting material Substances 0.000 claims description 2
- 230000008569 process Effects 0.000 abstract description 19
- 230000009471 action Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000001125 extrusion Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 230000004075 alteration Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000005272 metallurgy Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/0869—Devices involving movement of the laser head in at least one axial direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/70—Auxiliary operations or equipment
- B23K26/702—Auxiliary equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups
- B23K37/04—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups for holding or positioning work
- B23K37/0426—Fixtures for other work
- B23K37/0435—Clamps
Abstract
本发明公开了一种双摆头式五轴联动激光加工机床以及加工方法,包括底框,所述底框两端顶部均设置成侧板,所述侧板顶部设置有支架。本发明通过转杆与滑架的螺旋效果使得滑架在Y轴方向移动,滑架利用左侧的滑块对左侧的弹簧进行挤压,且左侧的两个转板在左侧滑块移动的过程转动,此时左侧的两个转板转动进而带动左侧的活动杆上移,右侧的弹簧弹力回弹,此时右侧的两个滑块逐渐远离,右侧的两个转板转动使得右侧的活动杆下移,放置板跟随滑架在Y轴方向上移动时,放置板左侧端上移,放置板右侧端下移,整个放置板在滑架顶部顺时针转动,此时激光头输出口能够在竖直方向上对弧形板左侧部的弧面进行加工。
Description
技术领域
本发明属于激光加工数控机床技术领域,特别涉及一种双摆头式五轴联动激光加工机床以及加工方法。
背景技术
激光加工技术是利用激光束与物质相互作用的特性,对材料进行切割、焊接、表面处理、打孔及微加工等的一门加工技术;激光加工作为先进制造技术已广泛应用于汽车、电子、电器、航空、冶金、机械制造等国民经济重要部门。
公开文件CN102000911A本发明公开了一种五轴联动激光加工机床,包括底座和床身两部分。床身包括安装于底座的立柱模块和平台模块两个模块,立柱模块包括Z轴子模块和A轴回转运动模块,Z轴模块上有竖直方向运动的Z轴溜板,溜板上安装有A轴回转运动模块,激光头安装于A轴末端,随A轴回转。平台模块部分由一个XY工作台和安装于该工作台之上的C轴回转运动模块组成。C轴由力矩电机驱动,C轴上设有回转工作台,工件通过专用夹具呈立式安装于回转工作台。本发明结构布局新颖、尺寸紧凑、加工精度高,同时能显著提高加工效率。现有的文件中利用A轴回转运动模块和C轴回转运动模块对弧形件进行加工时,此时激光头的输出口不能竖直的对弧形件的表面进行加工,容易导致弧形件的加工出现失误。
因此,发明一种双摆头式五轴联动激光加工机床以及加工方法来解决上述问题很有必要。
发明内容
针对上述问题,本发明提供了一种双摆头式五轴联动激光加工机床以及加工方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种双摆头式五轴联动激光加工机床,包括底框,所述底框两端顶部均设置成侧板,一所述侧板的顶部设置有支架,所述支架远离所述支架的一端固定连接有Z轴移动结构;所述Z轴移动结构传动连接有第一转动结构,所述第一转动结构的输出端的一侧连接有第二转动结构,所述第二转动结构的输出端连接有激光头;
所述底框内侧设置有活动槽,所述活动槽的中心处设置有滑架,所述滑架的底部螺旋贯穿设置有转杆,所述转杆的两端分别与所述活动槽的两侧槽壁转动连接,所述转杆的其中一端固定连接有Y轴移动结构;
所述滑架顶部设置有X轴移动结构,所述滑架两侧均设置有用于控制所述X轴移动结构摆动的抬升结构,且X轴移动结构包括用于放置弧形板的放置板,X轴移动结构用于限定弧形板的位置,使弧形板对准所述激光头输出口。
可选地,所述Z轴移动结构包括气缸和控制块,所述气缸底部与所述支架顶面固定连接,所述气缸输出端朝下设置并与所述控制块的顶面固定连接,所述第一转动结构安装于所述控制块底面;
所述Y轴移动结构包括设于所述底框的外侧壁上的电机,所述电机的输出端贯穿所述底框的外侧壁并与所述转杆的所述其中一端固定连接,所述滑架螺纹套接在所述转杆上。
可选地,所述抬升结构包括分别设于所述转杆两侧的两个侧杆,所述侧杆的两端分别与所述活动槽的两侧槽壁固定连接,所述侧杆贯穿所述滑架并与所述转杆平行;
一所述侧杆上滑动套接有四个滑块,所述滑架的两侧分别设置两个所述滑块;
位于所述滑架同一侧的两个滑块之间利用弹簧固定连接,所述弹簧套接于所述侧杆上,所述滑块的外侧边固定连接有凸杆,所述凸杆表面转动套接有转板,所述滑架的两侧分别设置有一活动杆,两个活动杆平行设置,位于所述滑架同一侧的所述转板的顶端均转动套接在同一个所述活动杆上,两个所述活动杆分别与放置板两端底部对应,所述放置板底面的两端分别通过一支撑杆与一所述活动杆的中心处固定连接。
可选地,两个所述侧板相对设置,且两个所述侧板的内侧表面均设置有通槽,所述通槽内设置有限定杆,两个限定杆平行设置;
所述X轴移动结构包括两个弹条,所述弹条的两端分别套接在两所述限定杆上,所述弹条底面设置有齿条槽;
所述X轴移动结构还包括步进电机,所述步进电机的输出端固定连接有螺杆,所述螺杆设于所述滑架顶部并与所述转杆垂直设置,所述放置板的底面中心处螺旋套接于所述螺杆表面,所述放置板的顶面开设有条槽,所述条槽中转动连接有转夹杆,所述转夹杆与所述螺杆平行,所述转夹杆的两端分别贯穿所述放置板的前后两侧的中心处并各固定连接有一齿轮,所述齿轮与所述齿条槽内的齿条啮合。
可选地,所述放置板顶面设置有两个夹板,两个夹板底部均利用卡块与所述转夹杆螺旋配合,所述弧形板被放置于两个所述夹板之间,两个所述夹板利用夹持结构对弧形板进行限定夹持。
可选地,所述夹持结构包括方圆杆,所述方圆杆贯穿所述夹板的中心处,所述夹板外侧面中心处设置有用于限定所述方圆杆的外架,所述方圆杆内侧端固定连接有用于限定夹持弧形板的夹片,所述方圆杆上套接固定有卡板,两所述夹板位于两所述卡板之间,所述卡板与所述外架之间固定连接有弹性件,所述弹性件套设于所述方圆杆的表面。
本发明还提供一种双摆头式五轴联动激光加工机床的加工方法,应用上述双摆头式五轴联动激光加工机床,包括以下步骤:
S1、需要对弧形板进行激光加工处理时,需要先对弧形板进行夹持,将弧形板对应放置于放置板顶面,拉动弹条,此时弹条与齿轮分离,转动齿轮,齿轮带动转夹杆在条槽内侧转动,转夹杆与卡块的螺旋效果进而使得卡块带动夹板在放置板顶面移动,两个放置板在卡块的带动下相互靠近或远离,两个放置板利用夹持结构的夹片对弧形板进行夹持,此时弧形板的外凸面竖直向上;
S2、当两个夹片分别夹持在弧形板两侧边时,继续转动齿轮,转夹杆转动利用卡块使得夹板继续靠近,此时弧形板对夹片的反作用力使得夹片逐渐靠近夹板,夹片利用方圆杆表面的卡板对弹性件进行挤压,利用弹性件的弹力从而方便两个方圆杆内侧端的夹片对弧形板两端进行限定夹持;
S3、气缸工作通过控制块带动第一转动结构以及第二转动结构下移,第一转动结构和第二转动结构配合对激光头的位置进行调整,由于滑架两侧的抬升结构对两个活动杆的限定,利用步进电机工作带动螺杆转动,螺杆转动进而带动放置板在X轴方向上来回移动,方便将在X轴方向来回移动的弧形板对应到激光头的输出口,利用激光头在X轴上对弧形板进行加工;
S4、启动电机,电机工作带动转杆转动,转杆进而带动滑架在Y轴上来回移动,通过抬升结构分别对放置板两端分别抬升,使得放置板顶面的弧形板转动,进而对弧形板的所需方位进行激光加工处理。
本发明的技术效果和优点:
1、本发明通过转杆与滑架的螺旋效果使得滑架在Y轴方向移动,滑架利用左侧的滑块对左侧的弹簧进行挤压,且左侧的两个转板在左侧滑块移动的过程转动,此时左侧的两个转板转动进而带动左侧的活动杆上移,右侧的弹簧弹力回弹,此时右侧的两个滑块逐渐远离,右侧的两个转板转动使得右侧的活动杆下移,放置板跟随滑架在Y轴方向上移动时,放置板左侧端上移,放置板右侧端下移,整个放置板在滑架顶部顺时针转动,此时激光头输出口能够在竖直方向上对弧形板左侧部的弧面进行加工。
2、本发明通过滑架带动放置板在Y轴方向上移动时,此时放置板前后侧的齿轮在弹条底面左移,齿轮在弹条底部顺时针转动,齿轮转动进而利用转夹杆使得两个夹板逐渐靠近,由于弧形板对两个夹片进行限定,此时外架跟随夹板同步移动时对弹性件进行挤压,利用弹性件的弹力提高弧形板在两个夹片之间的夹持稳定性;同理,滑架带动放置板在Y轴反方向上移动时,此时齿轮在弹条底部逆时针转动,齿轮转动进而利用转夹杆使得两个夹板逐渐远离,弹性件的弹力使得两个夹片能够继续对弧形板进行夹持,此时激光头还能对弧形板右侧部进行加工,直至两个夹片与弧形板之间没有挤压力时,能够将弧形板从而两个夹片之间取下,方便将需要加工的新弧形板安装在两个夹片之间,从而保证弧形板加工的可持续性。
3、本发明通过将两个夹片分别夹持在弧形板两侧边时,继续转动齿轮,转夹杆转动利用卡块使得夹板继续靠近,此时弧形板对夹片的反作用力使得夹片逐渐靠近夹板,夹片利用方圆杆表面的卡板对弹性件进行挤压,利用弹性件的弹力从而方便两个方圆杆内侧端的夹片对弧形板两端进行限定夹持,根据弧形板的宽度从而实时调整两个夹片之间的相对距离,提高夹持结构对不同宽度弧形板的适配性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
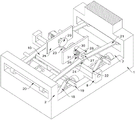
图1示出了本发明实施例的双摆头式五轴联动激光加工机床整体结构示意图;
图2示出了本发明实施例的滑架两侧的抬升结构示意图;
图3示出了本发明实施例的放置板顶部的夹持结构示意图;
图中:1、底框;2、侧板;3、支架;4、第一转动结构;5、第二转动结构;6、激光头;7、活动槽;8、滑架;9、转杆;10、放置板;11、气缸;12、控制块;13、电机;14、侧杆;15、滑块;16、弹簧;17、凸杆;18、转板;19、活动杆;20、限定杆;21、弹条;22、螺杆;23、转夹杆;24、齿轮;25、夹板;26、卡块;27、方圆杆;28、外架;29、夹片;30、卡板;31、弹性件。
具体实施方式
为使得本发明的发明目的、特征、优点能够更加的明显和易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本发明一部分实施例,而非全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
在本发明的描述中,需要理解的是,术语“上”、“下”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
本发明提供了一种双摆头式五轴联动激光加工机床,如图1所示,包括底框1,底框1两端顶部均设置成侧板2,侧板2顶部设置有支架3,支架3远离支架3的一端固定连接有Z轴移动结构;Z轴移动结构传动连接有第一转动结构4,第一转动结构4的输出端的一侧连接有第二转动结构5,第二转动结构5的输出端连接有激光头6;
底框1内侧设置有活动槽7,活动槽7的中心处设置有滑架8,滑架8的底部螺旋贯穿设置有转杆9,转杆9的两端分别与活动槽7的两侧槽壁转动连接,转杆9的其中一端固定连接有Y轴移动结构;
滑架8顶部设置有X轴移动结构,滑架8两侧均设置有用于控制X轴移动结构摆动的抬升结构,且X轴移动结构包括用于放置弧形板的放置板10,X轴移动结构用于限定弧形板的位置,使弧形板对准激光头6输出口。
将弧形板对应安装于放置板10顶面后,Z轴移动结构工作带动第一转动结构4以及第二转动结构5下移,第一转动结构4和第二转动结构5配合对激光头6的位置进行调整,由于滑架8两侧的抬升结构对放置板10两侧边的限定,此时放置板10顶面处于水平状态,利用X轴移动结构工作从而带动放置板10在X轴方向上来回移动,方便将在X轴方向来回移动的弧形板对应到激光头6的输出口,利用激光头6在X轴上对弧形板进行加工。Y轴移动机构工作带动转杆9转动,转杆9进而带动滑架8在Y轴上来回移动,通过抬升结构分别对放置板10两端分别抬升,使得放置板10顶面的弧形板转动,方便将弧形板的顶部弧形面能够竖直对应到激光头6的输出口,方便对弧形板的任意方位进行激光加工处理。
在图1中,Z轴移动结构包括气缸11和控制块12,气缸11底部与支架3顶面固定连接,气缸11输出端朝下设置并与控制块12的顶面固定连接,第一转动结构4安装于控制块12底面;
Y轴移动结构包括设于底框1的外侧壁上的电机13,电机13的输出端贯穿底框1的外侧壁并与转杆9的其中一端固定连接,滑架8螺纹套接在转杆9上。
Z轴移动结构工作时,利用气缸11工作带动控制块12在Z轴方向上下移动,控制块12上下移动时,控制块12利用第一转动结构4和第二转动结构5带动激光头6在Z轴方向上下移动。需要在Y轴方向对滑架8的位置进行调整时,启动电机13,电机13工作带动转杆9转动,转杆9与滑架8的螺旋效果使得滑架8在Y轴方向来回移动,此时滑架8能够带动放置板10顶面的弧形板在Y轴方向来回移动。
具体的,抬升结构包括分别设于转杆9两侧的两个侧杆14,侧杆14的两端分别与活动槽7的两侧槽壁固定连接,侧杆14贯穿滑架8并与转杆9平行;
一侧杆14上滑动套接有四个滑块15,滑架8的两侧分别设置两个滑块15;
位于滑架8同一侧的两个滑块15之间利用弹簧16固定连接,弹簧16套接于侧杆14上,滑块15的外侧边固定连接有凸杆17,凸杆17表面转动套接有转板18,滑架8的两侧分别设置有一活动杆19,两个活动杆19平行设置,位于滑架8同一侧的转板18的顶端均转动套接在同一个活动杆19上,两个活动杆19分别与放置板10两端底部对应,放置板10底面的两端分别通过一支撑杆与一活动杆19的中心处固定连接。
当滑架8在Y轴方向来回移动时,滑架8利用两个侧杆14从而在活动槽7内部平稳移动,利用两个侧杆14和转杆9配合,从而避免滑架8在活动槽7内部移动的过程中产生偏移,保证滑架8在活动槽7内部移动的平稳性;
当滑架8在Y轴方向上移动时,此时滑架8逐渐对左侧的滑块15进行挤压,左侧的滑块15跟随滑架8同步移动,且左侧的滑块15在移动过程中对左侧的弹簧16进行挤压,且左侧的两个转板18在左侧滑块15移动的过程转动,此时左侧的两个转板18转动进而带动左侧的活动杆19上移,右侧的弹簧16弹力回弹,此时右侧的两个滑块15逐渐远离,右侧的两个转板18转动使得右侧的活动杆19下移,放置板10跟随滑架8在Y轴方向上移动时,放置板10左侧端上移,放置板10右侧端下移,整个放置板10在滑架8顶部顺时针转动,此时激光头6输出口能够在竖直方向上对弧形板左侧部的弧面进行加工。同理,滑架8在Y轴反方向上移动时,此时放置板10左侧端下移,放置板10右侧端上移,整个放置板10在滑架8顶部逆时针转动,此时激光头6输出口能够在竖直方向上对弧形板右侧部的弧面进行加工,利用滑架8在Y轴方向来回移动,方便激光头6输出口能够在竖直方向上对弧形板顶面任意位置进行加工。
在图1和图3中,两个侧板2相对设置,且两个侧板2的内侧表面均设置有通槽,通槽内设置有限定杆20,两个限定杆20平行设置;
X轴移动结构包括两个弹条21,弹条21的两端分别套接在两限定杆20上,弹条21底面设置有齿条槽;
X轴移动结构还包括步进电机,步进电机的输出端固定连接有螺杆22,螺杆22设于滑架8顶部并与转杆9垂直设置,放置板10的底面中心处螺旋套接于螺杆22表面,放置板10的顶面开设有条槽,条槽中转动连接有转夹杆23,转夹杆23与螺杆22平行,转夹杆23的两端分别贯穿放置板10的前后两侧的中心处并各固定连接有一齿轮24,齿轮24与齿条槽内的齿条啮合。
具体的,放置板10顶面设置有两个夹板25,两个夹板25底部均利用卡块26与转夹杆23螺旋配合,弧形板被放置于两个夹板25之间,两个夹板25利用夹持结构对弧形板进行限定夹持。
当放置板10在Y轴方向来回移动时,放置板10利用转夹杆23带动齿轮24同步移动,此时齿轮24利用弹条21的侧边带动弹条21移动时,弹条21两端在两个限定杆20表面跟随放置板10同步移动。当滑架8在Y轴方向来回移动时,此时转夹杆23两端的齿轮24能够与弹条21底面的齿条啮合转动,齿轮24进而带动转夹杆23在放置板10顶面转动;
当齿轮24与齿条的啮合配合带动转夹杆23在条槽内部转动时,由于两个卡块26的内螺纹方向相反,转夹杆23在两个卡块26内侧转动时,此时两个卡块26在转夹杆23转动的过程中相互靠近或远离,两个卡块26相互靠近时从而利用夹板25上的夹持结构对弧形板夹持,两个卡块26相互远离从而方便将弧形板从夹持结构上取下,可以对新的弧形板进行加工。
在图1和图3中,夹持结构包括方圆杆27,方圆杆27贯穿夹板25的中心处,夹板25外侧面中心处设置有用于限定方圆杆27的外架28,方圆杆27内侧端固定连接有用于限定夹持弧形板的夹片29,方圆杆27上套接固定有卡板30,两夹板25位于两卡板30之间,卡板30与外架28之间固定连接有弹性件31,弹性件31套设于方圆杆27的表面。
当滑架8带动放置板10在Y轴方向上移动时,此时放置板10前后侧的齿轮24在弹条21底面左移,齿轮24在弹条21底部顺时针转动,齿轮24转动进而利用转夹杆23使得两个夹板25逐渐靠近,由于弧形板对两个夹片29进行限定,此时外架28跟随夹板25同步移动时对弹性件31进行挤压,利用弹性件31的弹力提高弧形板在两个夹片29之间的夹持稳定性。同理,滑架8带动放置板10在Y轴反方向上移动时,此时齿轮24在弹条21底部逆时针转动,齿轮24转动进而利用转夹杆23使得两个夹板25逐渐远离,弹性件31的弹力使得两个夹片29能够继续对弧形板进行夹持,此时激光头6还能对弧形板右侧部进行加工,直至两个夹片29与弧形板之间没有挤压力时,能够将弧形板从而两个夹片29之间取下,方便将需要加工的新弧形板安装在两个夹片29之间,从而保证弧形板加工的可持续性。
本发明还提供一种双摆头式五轴联动激光加工机床的加工方法,如图1-3所示,加工方法应用上述双摆头式五轴联动激光加工机床,包括以下步骤:
S1、需要对弧形板进行激光加工处理时,需要先对弧形板进行夹持,将弧形板对应放置于放置板10顶面,拉动弹条21,此时弹条21与齿轮24分离,转动齿轮24,齿轮24带动转夹杆23在条槽内侧转动,转夹杆23与卡块26的螺旋效果进而使得卡块26带动夹板25在放置板10顶面移动,两个放置板10在卡块26的带动下相互靠近或远离,两个放置板10利用夹持结构的夹片29对弧形板进行夹持,此时弧形板的外凸面竖直向上;
S2、当两个夹片29分别夹持在弧形板两侧边时,继续转动齿轮24,转夹杆23转动利用卡块26使得夹板25继续靠近,此时弧形板对夹片29的反作用力使得夹片29逐渐靠近夹板25,夹片29利用方圆杆27表面的卡板30对弹性件31进行挤压,利用弹性件31的弹力从而方便两个方圆杆27内侧端的夹片29对弧形板两端进行限定夹持;
S3、气缸11工作通过控制块12带动第一转动结构4以及第二转动结构5下移,第一转动结构4和第二转动结构5配合对激光头6的位置进行调整,由于滑架8两侧的抬升结构对两个活动杆19的限定,此时两个活动杆19的中心线处于同一水平面上,利用步进电机工作带动螺杆22转动,螺杆22转动进而带动放置板10在X轴方向上来回移动,方便将在X轴方向来回移动的弧形板对应到激光头6的输出口,利用激光头6在X轴上对弧形板进行加工;
S4、启动电机13,电机13工作带动转杆9转动,转杆9进而带动滑架8在Y轴上来回移动,通过抬升结构分别对放置板10两端分别抬升,使得放置板10顶面的弧形板转动,方便将弧形板的顶部弧形面能够竖直对应到激光头6的输出口,进而对弧形板的所需方位进行激光加工处理。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
Claims (7)
1.一种双摆头式五轴联动激光加工机床,包括底框(1),所述底框(1)两端顶部均设置成侧板(2),一所述侧板(2)的顶部设置有支架(3),其特征在于:所述支架(3)远离所述支架(3)的一端固定连接有Z轴移动结构;所述Z轴移动结构传动连接有第一转动结构(4),所述第一转动结构(4)的输出端的一侧连接有第二转动结构(5),所述第二转动结构(5)的输出端连接有激光头(6);
所述底框(1)内侧设置有活动槽(7),所述活动槽(7)的中心处设置有滑架(8),所述滑架(8)的底部螺旋贯穿设置有转杆(9),所述转杆(9)的两端分别与所述活动槽(7)的两侧槽壁转动连接,所述转杆(9)的其中一端固定连接有Y轴移动结构;
所述滑架(8)顶部设置有X轴移动结构,所述滑架(8)两侧均设置有用于控制所述X轴移动结构摆动的抬升结构,且X轴移动结构包括用于放置弧形板的放置板(10),X轴移动结构用于限定弧形板的位置,使弧形板对准所述激光头(6)输出口。
2.根据权利要求1所述的双摆头式五轴联动激光加工机床,其特征在于:
所述Z轴移动结构包括气缸(11)和控制块(12),所述气缸(11)底部与所述支架(3)顶面固定连接,所述气缸(11)输出端朝下设置并与所述控制块(12)的顶面固定连接,所述第一转动结构(4)安装于所述控制块(12)底面;
所述Y轴移动结构包括设于所述底框(1)的外侧壁上的电机(13),所述电机(13)的输出端贯穿所述底框(1)的外侧壁并与所述转杆(9)的所述其中一端固定连接,所述滑架(8)螺纹套接在所述转杆(9)上。
3.根据权利要求2所述的双摆头式五轴联动激光加工机床,其特征在于:
所述抬升结构包括分别设于所述转杆(9)两侧的两个侧杆(14),所述侧杆(14)的两端分别与所述活动槽(7)的两侧槽壁固定连接,所述侧杆(14)贯穿所述滑架(8)并与所述转杆(9)平行;
一所述侧杆(14)上滑动套接有四个滑块(15),所述滑架(8)的两侧分别设置两个所述滑块(15);
位于所述滑架(8)同一侧的两个滑块(15)之间利用弹簧(16)固定连接,所述弹簧(16)套接于所述侧杆(14)上,所述滑块(15)的外侧边固定连接有凸杆(17),所述凸杆(17)表面转动套接有转板(18),所述滑架(8)的两侧分别设置有一活动杆(19),两个活动杆(19)平行设置,位于所述滑架(8)同一侧的所述转板(18)的顶端均转动套接在同一个所述活动杆(19)上,两个所述活动杆(19)分别与放置板(10)两端底部对应,所述放置板(10)底面的两端分别通过一支撑杆与一所述活动杆(19)的中心处固定连接。
4.根据权利要求3所述的双摆头式五轴联动激光加工机床,其特征在于:
两个所述侧板(2)相对设置,且两个所述侧板(2)的内侧表面均设置有通槽,所述通槽内设置有限定杆(20),两个限定杆(20)平行设置;
所述X轴移动结构包括两个弹条(21),所述弹条(21)的两端分别套接在两所述限定杆(20)上,所述弹条(21)底面设置有齿条槽;
所述X轴移动结构还包括步进电机,所述步进电机的输出端固定连接有螺杆(22),所述螺杆(22)设于所述滑架(8)顶部并与所述转杆(9)垂直设置,所述放置板(10)的底面中心处螺旋套接于所述螺杆(22)表面,所述放置板(10)的顶面开设有条槽,所述条槽中转动连接有转夹杆(23),所述转夹杆(23)与所述螺杆(22)平行,所述转夹杆(23)的两端分别贯穿所述放置板(10)的前后两侧的中心处并各固定连接有一齿轮(24),所述齿轮(24)与所述齿条槽内的齿条啮合。
5.根据权利要求4所述的双摆头式五轴联动激光加工机床,其特征在于:
所述放置板(10)顶面设置有两个夹板(25),两个夹板(25)底部均利用卡块(26)与所述转夹杆(23)螺旋配合,所述弧形板被放置于两个所述夹板(25)之间,两个所述夹板(25)利用夹持结构对弧形板进行限定夹持。
6.根据权利要求5所述的双摆头式五轴联动激光加工机床,其特征在于:
所述夹持结构包括方圆杆(27),所述方圆杆(27)贯穿所述夹板(25)的中心处,所述夹板(25)外侧面中心处设置有用于限定所述方圆杆(27)的外架(28),所述方圆杆(27)内侧端固定连接有用于限定夹持弧形板的夹片(29),所述方圆杆(27)上套接固定有卡板(30),两所述夹板(25)位于两所述卡板(30)之间,所述卡板(30)与所述外架(28)之间固定连接有弹性件(31),所述弹性件(31)套设于所述方圆杆(27)的表面。
7.一种双摆头式五轴联动激光加工机床的加工方法,其特征在于:所述加工方法应用权利要求6所述的双摆头式五轴联动激光加工机床,包括以下步骤:
S1、需要对弧形板进行激光加工处理时,需要先对弧形板进行夹持,将弧形板对应放置于放置板(10)顶面,拉动弹条(21),此时弹条(21)与齿轮(24)分离,转动齿轮(24),齿轮(24)带动转夹杆(23)在条槽内侧转动,转夹杆(23)与卡块(26)的螺旋效果进而使得卡块(26)带动夹板(25)在放置板(10)顶面移动,两个放置板(10)在卡块(26)的带动下相互靠近或远离,两个放置板(10)利用夹持结构的夹片(29)对弧形板进行夹持,此时弧形板的外凸面竖直向上;
S2、当两个夹片(29)分别夹持在弧形板两侧边时,继续转动齿轮(24),转夹杆(23)转动利用卡块(26)使得夹板(25)继续靠近,此时弧形板对夹片(29)的反作用力使得夹片(29)逐渐靠近夹板(25),夹片(29)利用方圆杆(27)表面的卡板(30)对弹性件(31)进行挤压,利用弹性件(31)的弹力从而方便两个方圆杆(27)内侧端的夹片(29)对弧形板两端进行限定夹持;
S3、气缸(11)工作通过控制块(12)带动第一转动结构(4)以及第二转动结构(5)下移,第一转动结构(4)和第二转动结构(5)配合对激光头(6)的位置进行调整,由于滑架(8)两侧的抬升结构对两个活动杆(19)的限定,利用步进电机工作带动螺杆(22)转动,螺杆(22)转动进而带动放置板(10)在X轴方向上来回移动,方便将在X轴方向来回移动的弧形板对应到激光头(6)的输出口,利用激光头(6)在X轴上对弧形板进行加工;
S4、启动电机(13),电机(13)工作带动转杆(9)转动,转杆(9)进而带动滑架(8)在Y轴上来回移动,通过抬升结构分别对放置板(10)两端分别抬升,使得放置板(10)顶面的弧形板转动,进而对弧形板的所需方位进行激光加工处理。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211228300.6A CN115555703A (zh) | 2022-10-08 | 2022-10-08 | 一种双摆头式五轴联动激光加工机床以及加工方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211228300.6A CN115555703A (zh) | 2022-10-08 | 2022-10-08 | 一种双摆头式五轴联动激光加工机床以及加工方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115555703A true CN115555703A (zh) | 2023-01-03 |
Family
ID=84745696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211228300.6A Withdrawn CN115555703A (zh) | 2022-10-08 | 2022-10-08 | 一种双摆头式五轴联动激光加工机床以及加工方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115555703A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117047520A (zh) * | 2023-10-12 | 2023-11-14 | 宿迁康明机械制造有限公司 | 数控机床用夹具及数控机床 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6390380A (ja) * | 1986-10-01 | 1988-04-21 | Mitsubishi Electric Corp | レ−ザ加工装置 |
| CN1857844A (zh) * | 2006-05-11 | 2006-11-08 | 江苏大学 | 摩擦副零件表面形貌的激光微造型方法及设备 |
| CN102000911A (zh) * | 2010-07-29 | 2011-04-06 | 西安交通大学 | 一种五轴联动激光加工机床 |
| CN201848649U (zh) * | 2010-10-26 | 2011-06-01 | 南京南传激光设备有限公司 | 双转台五轴联动三维光纤激光数控切割机 |
| CN106799545A (zh) * | 2017-02-28 | 2017-06-06 | 莆田学院 | 一种五轴联动激光切割器 |
| CN213438049U (zh) * | 2020-10-28 | 2021-06-15 | 新宝机器人科技(南通)有限公司 | 一种气动多角度焊接变位器 |
| CN113500298A (zh) * | 2021-07-21 | 2021-10-15 | 哈尔滨工业大学 | 一种曲面工件表面微织构激光烧蚀加工装置及方法 |
| CN114226963A (zh) * | 2021-12-31 | 2022-03-25 | 江苏大学 | 一种关节轴承球面激光微加工装置及方法 |
| CN114888447A (zh) * | 2021-01-25 | 2022-08-12 | 广东大族粤铭激光集团股份有限公司 | 对称三维激光切割方法 |
-
2022
- 2022-10-08 CN CN202211228300.6A patent/CN115555703A/zh not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6390380A (ja) * | 1986-10-01 | 1988-04-21 | Mitsubishi Electric Corp | レ−ザ加工装置 |
| CN1857844A (zh) * | 2006-05-11 | 2006-11-08 | 江苏大学 | 摩擦副零件表面形貌的激光微造型方法及设备 |
| CN102000911A (zh) * | 2010-07-29 | 2011-04-06 | 西安交通大学 | 一种五轴联动激光加工机床 |
| CN201848649U (zh) * | 2010-10-26 | 2011-06-01 | 南京南传激光设备有限公司 | 双转台五轴联动三维光纤激光数控切割机 |
| CN106799545A (zh) * | 2017-02-28 | 2017-06-06 | 莆田学院 | 一种五轴联动激光切割器 |
| CN213438049U (zh) * | 2020-10-28 | 2021-06-15 | 新宝机器人科技(南通)有限公司 | 一种气动多角度焊接变位器 |
| CN114888447A (zh) * | 2021-01-25 | 2022-08-12 | 广东大族粤铭激光集团股份有限公司 | 对称三维激光切割方法 |
| CN113500298A (zh) * | 2021-07-21 | 2021-10-15 | 哈尔滨工业大学 | 一种曲面工件表面微织构激光烧蚀加工装置及方法 |
| CN114226963A (zh) * | 2021-12-31 | 2022-03-25 | 江苏大学 | 一种关节轴承球面激光微加工装置及方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117047520A (zh) * | 2023-10-12 | 2023-11-14 | 宿迁康明机械制造有限公司 | 数控机床用夹具及数控机床 |
| CN117047520B (zh) * | 2023-10-12 | 2024-01-09 | 宿迁康明机械制造有限公司 | 数控机床用夹具及数控机床 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201862863U (zh) | 立式四轴数控剃齿机机床布局 | |
| WO2020207353A1 (zh) | 一种卧式五轴翻板加工中心 | |
| CN115555703A (zh) | 一种双摆头式五轴联动激光加工机床以及加工方法 | |
| CN2686796Y (zh) | 立卧式高速镗铣加工机床 | |
| CN114654080A (zh) | 一种流水型汽车钣金环形激光切割装置 | |
| CN210360352U (zh) | 一种机械加工用方便工件转动的夹具 | |
| CN213438486U (zh) | 一种汽车零部件生产用加工中心的工件定位装置 | |
| CN215975960U (zh) | 一种齿条淬火机床 | |
| CN107322376B (zh) | 一种旋转锉磨加工装置 | |
| CN215394163U (zh) | 一种立卧复合五面重型龙门加工中心 | |
| CN109702645B (zh) | 一种主轴可摆动机床的主轴摆动角度控制方法 | |
| CN217412967U (zh) | 一种仿形焊接机 | |
| CN210161835U (zh) | 一种五轴立体雕刻机 | |
| CN201264304Y (zh) | 石材异型制品复合加工中心 | |
| CN215902863U (zh) | 一种立式数控齿轮滚棱机 | |
| CN220028999U (zh) | 一种带激光刻线的双主轴钻铣加工中心 | |
| CN220278981U (zh) | 一种具有强切削功能的金属切削数控车床 | |
| CN220717852U (zh) | 一种桌面板材钻铣床 | |
| CN215547036U (zh) | 一种加工精度高的金属切削装置 | |
| CN219665468U (zh) | 一种便于调节的电机定子焊接工装 | |
| CN217572357U (zh) | 一种建筑幕墙施工用幕墙切割装置 | |
| CN212351398U (zh) | 一种具有去毛刺装置的卧式铣床 | |
| CN216829630U (zh) | 一种数控机床用的直线导轨滑块 | |
| CN220839263U (zh) | 一种用于多角度加工的分度头 | |
| CN217571978U (zh) | 用于数控加工设备的工件固定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20230103 |
|
| WW01 | Invention patent application withdrawn after publication |