CN1145577C - 用于转子锁住电梯电机驱动的电流调节器控制补偿的自动校准 - Google Patents
用于转子锁住电梯电机驱动的电流调节器控制补偿的自动校准 Download PDFInfo
- Publication number
- CN1145577C CN1145577C CNB981255310A CN98125531A CN1145577C CN 1145577 C CN1145577 C CN 1145577C CN B981255310 A CNB981255310 A CN B981255310A CN 98125531 A CN98125531 A CN 98125531A CN 1145577 C CN1145577 C CN 1145577C
- Authority
- CN
- China
- Prior art keywords
- gain
- loop
- current
- motor
- rated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/16—Estimation of constants, e.g. the rotor time constant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B19/00—Mining-hoist operation
- B66B19/007—Mining-hoist operation method for modernisation of elevators
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
- Elevator Control (AREA)
Abstract
一种具有逻辑(48)的电梯控制器(7),其通过在参考电流IqREF中注入具有预定的测试频率(FOL,FCL)的正弦波,测量开环和闭环传递函数,并调整KP和KI,直到在根据FOL而设置的GC下所需的开环和闭环响应达到为止,来自动地计算电流调节器/电机驱动装置(20)的比例增益(KP),积分增益(KI),和整体增益(GC)。
Description
和本发明同时申请的待审的序列号为(Otis Docket Nos.OT-3064,OT-3065,OT-3054,OT-4046,OT-4047)的美国专利包含的主题和本申请的主题相关。
本发明涉及电机/驱动系统的自动校准方法,尤其涉及用于电梯电机驱动的电流调节器控制补偿的自动校准方法。
在电机驱动电路领域中,使用电流调节器(或电流控制器)控制电机电流是公知的。还知道使用电机电流的比例-积分(P-I)闭环控制。然而,这种电流调节器必须对于电机的电磁动态性能进行精确地调整,以便提供电机电流的精确控制,从而提供在电机轴产生的转矩的精确控制。具体地说,对于P-I控制器,比例增益KP和积分增益KI应当和电机的动态特性相匹配,以便提供最佳的性能。
用来确定这些控制参数的一种技术是在工程实验室分析电机/驱动系统,其中使用昂贵的测试设备,并要由熟练技工或工程师进行费时的高技术的工作。然而,在现代化的或改进的应用中,其中在现有的电梯系统中新的驱动代替旧的驱动,为进行电机计算而从电梯系统中除去电机是不方便的或者成本-效果低的一种方法。
另一种用于确定调节器控制参数的技术涉及需要高级工程师到现场使用专用测试设备调整电机驱动系统。然而,这种技术费用高并且耗时,因而,使得现代化的电梯电机驱动系统对大楼所有者没有吸引力。
此外,已经公开了多种用于调整电流调节器的技术,例如在以下文献中所述的技术:A.M.Khambadkone,等,“Vector-controlledinduction motor drive with self-commissioning scheme”,IEEETrans.Ind.Electronics,38卷,5期,1991年10月,第322-327页;H.Schierling,“Self-commissioning-a novel feature of moderninverter-fed induction motor drives”,关于Power Electronics andVariable Speed Drives的第三次国际会议,IEEEConf.Pub.No.291,pp.287-290;M.Sumner等,“Autocommissioning forvoltage-referenced voltage-fed vector-controlled inductionmotor drives”,IEEE Proceedings-B,140卷,3期,1993年3月;T.Kudor等,“Self-commissioning for vector-controlled inductionmotors”,IEEE Pub.ID#0-7803-x/93,第528-555页。
这些技术试图测量电机参数,然后,根据这些估算按照算法计算电流调节器增益。具体地说,Khambdadkone和Schierling教导对电机施加对电压脉冲,并使用电流的上升率来估算电机的瞬变电感。Sumner教导对电机施加电压脉冲的伪随机二进制序列,并使用递归最小平方计算来估算电机参数。使用估算的电机参数利用磁极替换算法来确定电流调节器参数。Kudor教导对电流调节器施加阶跃输入,并根据阶跃响应计算性能指数。使用模糊逻辑规则调节调节器增益,以便达到最佳的调整。然而,前述的技术实现起来费用高,而且复杂。
本发明的目的在于提供一种用于电梯电机驱动装置的电流调节器的控制参数的自动的现场校准方法,其中不需要从电梯系统中除去或拆下电机。
按照本发明,一种用于计算电梯电机控制器电流调节器补偿的比例增益、积分器的积分增益以及整体增益的方法,控制器和电机构成电流回环,包括以下步骤:(a)在步骤(b)-(f)期间使积分器对控制器的输出维持在接近为零的数值;(b)把比例增益设为一个初始值;(c)根据第一测试频率设置整体增益;(d)对电流调节器提供第一测试频率的正弦电流参考信号;(e)计算在第一测试频率下的电流环的开环增益;(f)改变比例增益并进行步(e),直到开环增益处于1的预定允差内;(g)对电流调节器提供第二测试频率的正弦电流参考信号;(h)计算在第二测试频率下的电流环的闭环增益;以及(i)改变积分增益并进行步(h),直到闭环增益处于1的预定允差内。
本发明通过允许电流调节器控制参数(K1,KP,GC)在现场自动地被确定而代表了对现有技术的重大改进。本发明不需要从现场拆下电机或从电梯系统中拆下电机。此外,本发明不需要专门训练的工程师利用专用的测试设备调整电机/驱动系统。因而,当新的电机驱动装置在现场安装时,本发明能够大大降低和调整电流调节器有关的费用。因而,在现场进行控制参数的自动细调可以节省时间和费用。结果,本发明对大楼拥有者更有吸引力,从而使其将其电梯系统更新为现代控制系统,而这在当前在经济上是不现实的,这是因为,确定在现代化的工作场所中存在的旧的电机的参数需要高额费用。此外,本发明在其整个校准过程中还能使现有的电梯电机控制系统和安全系统保持原样。
本发明的上述的以及其它的目的特点和优点通过下面结合附图进行的对本发明的示例的实施例的说明可以看得更加清楚。
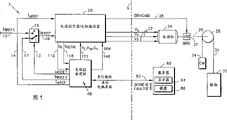
图1是具有按照本发明的自动校准逻辑的电流调节器/电机驱动装置的电梯电机控制器的部分原理方块图;
图2是按照本发明的电流调节器/电机驱动装置的原理方块图;
图3是按照本发明的图1的系统的控制系统方块图;
图4是按照本发明的图3的控制系统的开环传递函数的幅频响应曲线;
图5是按照本发明的图3的控制系统的闭环传递函数的幅频响应曲线;
图6是按照本发明的图1的自动校准逻辑的逻辑流程图。
参看图1,在线9的左面所示的电梯电机控制器部分包括磁场定向的(或矢量控制的)电机控制器,其具有两个控制环,每个相应于一个不同的控制轴,d轴相应于电机激磁,q轴相应于转矩。d轴相应于环具有在线14上提供的d轴电流参考输入信号IdREF。IdREF被设置为预定的常数,使得根据电机磁化曲线例如IdRATED或INO-LOAD在电机内提供合适的磁通,后面还要讨论。IdREF信号被送到磁场定向的电流调节器/电机控制电路20,后面结合图2还要讨论。
q轴电流环具有在线15上的第一q轴电流参考输入信号IqREF1,被输入到开关19的一个输入端。IqREF1由其它的逻辑提供(未示出),例如速度环补偿逻辑(未示出),其使电机速度环闭合,例如在待审的序列号为Otis Docket No.OT-3054的美国专利所述的那样,当不进行自动校准时,其对控制器提供q轴电流参考信号。
开关19的其它的输入是在线17上的第二q轴电流参考输入信号IqREF2。开关19的输出是在线18上的q轴电流环参考信号IQRE,根据在线13上提供给开关19的MODE1信号的状态,其被设置为等于IqREF1或IqREF2。IqREF信号被送到磁场定向的电流调节器/电机驱动电路20,下面结合图2还要说明。
本发明使用的三相交流感应电机的两个例子是由Loher生产的型号为LUGA-225LB-04A,额定功率为45KW,额定电压为355V,额定速度为1480,额定频率为50Hz,用于齿轮结构;以及由(台湾的)Tatung生产的,型号为156MST,额定功率40KW,额定电压500V,额定速度251,额定频率16.7Hz,用于无齿轮结构中。如果需要,可以使用具有其它额定参数的电机。
电路20在线22上对电机24,例如三相感应电动机,提供三相电压信号Vx,Vy,Vz。电机24通过机械连接装置26例如轴与/或齿轮箱和滑轮28相连。缆绳或缆索30绕在滑轮28上,一端和电梯轿箱32相连,另一端和配重34相连。配重的重量一般等于空轿箱的重量加上轿箱内最大负荷的40-50%。
如果需要把电机24的输出转矩转换为电梯轿箱32的运动,也可以使用其它的电梯系统结构,有或没有配重,有或没有齿轮箱,例如双电梯(其中两个电梯轿箱和一个绳索相连,轿箱沿相反方向运动,每个轿箱作为另一个轿箱的配重),鼓形机械(其中绳索被绕在由电机驱动的鼓上),等。
制动器37,例如电磁致动的盘制动器被设置在轴26上,并被来自电路20的线38上的电制动指令信号BRKCMD驱动。制动器37当被致动或“落下”时,便夹在轴26上,从而阻止电机轴26转动,即锁住转子,因而阻止滑轮28运动。
参看图2,在磁场定向电机控制领域中知道,这种控制使用分别相应于d,q轴的电流(Id,Iq)和电压(Vd,Vq)参数。使用磁场定向时,电机磁场(或磁通)将被Id控制,电机转矩被Iq控制,这是公知的。具体地说,图1的磁场定向电流调节器/电机驱动器20包括两个电流控制环,一个用于d轴电流Id,一个用于q轴电流Iq。Id环接收在线14上的IdREF信号,被送到加法器102的正输入端。在线104上的测量的或反馈的d轴电流信号Id被送到加法器102的负输入端。加法器102的输出是在线106上的误差信号IdERR,被送到控制补偿逻辑108,例如比例积分(P-I)电流环控制,其具有提供在线121上的比例增益KP,积分增益KI,和整体增益GC,如后面要说明的。逻辑108在线110上提供d轴电压指令信号VdCMD。
对于q轴,Iq环接收在线18上的IqREF信号,被送到加法器114的正输入端。在线116上的测量的或反馈的q轴电流信号Iq被送到加法器114的负输入端。加法器114的输出是在线118上的误差信号IqERR,被送到控制补偿逻辑120,例如类似于逻辑108的比例积分(P-I)逻辑,其具有比例增益KP,积分增益KI,和整体增益GC,和逻辑108的增益相同。逻辑120的输出是在线122上的q轴电压指令信号VqCMD。
电压指令VdCMD和VqCMD被送到公知的磁场定向的三相转换逻辑124,它把d,q轴电压指令转换为在线126上的三相电压指令VXCMD,VYCMD,VZCMD。相电压指令VXCMD,VYCMD,VZCMD被送到公知的三相驱动电路(或逆变器)128,其在线130,132,134(整体上,线22)上分别提供三相电压VX,VY,VZ,用于驱动电机24(图1)。
在驱动电路128内(未示出细节),在线126上的每个电压指令VXCMD,VYCMD,VZCMD被转换为代表相应的输入电压值的百分比占空度指令。百分比占空度指令被转换成脉宽调制的驱动信号,其驱动功率晶体管,从而在线130,132,134上分别提供脉宽调制的可变频率的三相电压VX,VY,VZ。在驱动器128中的转换使用在电机驱动电路领域中熟知的电子元件与/或软件完成。也可以使用任何其它类型的接收输入电压指令并提供输出相电压的驱动电路,并且相电压不一定是脉宽调制的。
分别和相电压VX,VY,VZ相关的相电流IX,IY,IZ利用公知的电流传感器136,138,140分别进行测量,例如公知的闭环霍耳效应电流传感器(例如LEMS),并分别被提供在线141,142,143上。相电流IX,IY,IZ被送到公知的三相到磁场定向的转换逻辑142,其在线104,116上提供从相电流到作为反馈电流分别被送到加法器102,114的d,q轴电流Id,Iq的转换。
转换器124,150提供矢量参数(d,q轴)和每相参数之间的转换,例如在D.Novotny等的“Vector Control and Dynamics of ACDrives”,Oxford University Press,1996,Ch 5,pp 203-251所述。转换器124,15也可以使用微处理器等利用软件实行这种转换。
电机驱动逻辑111也包括制动驱动电路145,其接收在线146上的输入信号BRK,并在线38上提供BRKCMD信号。
参见图1,本发明包括自动校准逻辑48,其自动地计算控制参数KI,KP,GC,并在线121上提供给电路20。逻辑48还接收来自电路20的IqERR和Iq。逻辑48还向开关19提供电流参考信号IqREF2,并在线14上向电路20提供IdREF。逻辑48还在线13上对开关19提供MODE1信号。MODE1标记使来自校准逻辑48的电流参考信号IqREF2被送到逻辑20。逻辑48还在线146上对电路20提供中断请求信号BRK。
校准逻辑48还和服务器80通过串行链路82进行通信。服务器80包括显示器84和键垫(或键盘)86,用于对服务器80输入数据,并通过链路82向控制器7输入数据。具体地说,逻辑48通过链路82接收来自服务器80的开始指令和停止指令,其分别控制自动校准开始和停止(或中断)的时间。逻辑66还通过链路82向服务器80提供DONE信号和FAULT信号。DONE信号表示自动校准无故障而被完成的时间,FAULT信号表示在自动校准期间检测到故障时的时间。
逻辑48包括公知的电子元件,其中可以包括能够完成其中所述的功能的微处理器,接口电路,存储器,软件,与/或固件。
参看图3,其中示出了当MODE1信号(图1)命令开关19设置IqREF等于IqREF2,作为q轴电流环的参考时(即自动校准方式时),图1和图2的具有自动校准逻辑48的q轴电流环的控制系统方块图的等效图。可以把图3的控制系统的各个部分比喻为图1和图2的原理方块图的一部分。具体地说,图3的控制系统包括在线210(类似于图2的线18)上的来自自动校准逻辑48的q轴电流参考信号IqREF,其被送到加法器212(类似于图2的加法器114)的正输入端。在线214上的Iq电流反馈信号被送到加法器212的负输入端。加法器212在线216上对代表P-I控制补偿的补偿218提供误差信号IERR(类似于图2的q轴环补偿逻辑)。补偿218包括已知的比例积分控制传递函数:
GC(KP+KI/s) 式1
其中KI是积分增益,KP是比例增益,GC是整体增益,“s”是拉普拉斯变换算子。
补偿218在线220上对代表电机驱动111(图2)的传递函数的驱动222提供电压指令信号VqCMD,驱动222在相关的频率范围内的传递函数为1。驱动222在线224上对代表电机(图1)24的传递函数的方块226提供每相驱动电压VPH。电机24的传递函数用由下式表示的一阶滞后近似:
1/(LS+R) 式2其中L是电机的每相的电感,R是每相的电阻,“s”是拉普拉斯算子。电机24是三相感应电机,但也可以是具有相同传递函数的任何类型的电机。电机的q轴电流Iq在线214上被表示,并被送回加法器212。Iq实际上在驱动部分111(图2)内测量;不过,电机的传递函数是如图3所示的控制系统闭环动态特性的一部分。
如前参照图1和图2所述,自动校准逻辑48在线210上向q轴电流环提供IqREF2(以及MODE1和IdREF信号,图3中未示出),在这种情况下,其等于q轴电流环参考IqREF,分别在线216,214(类似于图2的线118,116)上接收来自q轴电流环的信号IqERR,Iq,在线219(类似于图2的线121)上对补偿部分218提供控制参数KI,KP,GC,并通过串行链路82接收和提供参数。
参看图3,图4和图5,自动校准逻辑48设置GC并调节KI,KP,从而获得所需的整个驱动/电机环响应而不拆下或除去电机。具体地说,合并式1,式2得到控制系统方块图的开环传递函数如下:
如果KP=L,KI=R,则式3的开环传递函数简化为GC/s,相当于具有增益GC的积分器,其提供电机控制系统所需的环路性能。所得的积分器具有在ωc(弧度/秒)=GC(即开环截止频率)相交于1(0dB)的幅频响应(或增益)。因而,积分器增益GC被设置等于以弧度每秒表示的所需的开环截止频率(即GC=ωc=2πFOL)。对于一个具有等于一个积分器的开环传递函数的系统,开环增益经过1(0dB)时的频率,即开环截止频率(FOL),等于这样一个频率,在此频率下,闭环响应比1(0dB)小一个预定的量(例如3dB),即闭环带宽。
自动校准逻辑48通过链路82接收来自服务器80(计算GC或FOL)的GC和/或FOL的值,并向电路20提供GC。逻辑48还使用二阶处理(下面参照图6详细说明)确定KI和KP的值。首先,改变(或调整)积分增益KI=0(或接近于0)时的比例增益KP。设置KI=0(或接近于0)的目的在于,在这处理的第一步期间,从对系统响应的贡献中消除或减少补偿108,120的积分器部分。如果需要减少积分器的贡献,也可以使用其它技术,例如暂时解除积分器,使积分器转换到系统之外,或补偿积分器的输出为0。
然后,一个正弦输入信号作为参考电流IqREF被提供给环路,其中输入信号具有等于所需的开环截止频率的频率FOL。通过计算信号Iq和IqERR的比来计算开环幅值。改变KP直到开环增益的幅值处于1(0dB)的预定的允差内。
参看图4和图5,如果拐点频率FB比开环截止频率FOL足够小,则在开环截止频率处的开环响应和积分器类似。因而,闭环带宽(由点400表示),即闭环频率响应或增益开始下降或衰减时所在频率,将基本上等于开环截止频率FOL。
第二,在由上述的第一步确定的值而设定KP的条件下,调整积分增益KI。在这种情况下,对环路提供正弦输入信号作为参考电流信号IqREF,其中输入信号具有FCL=0.8FOL的频率,即所需的环路的闭环带宽。根据系统响应,如果需要,可以使用小于0.8的系数。改变KI直到闭环传递函数的幅值处于1(0dB)的预定的允差内。
参看图6,更具体地说,用于自动校准逻辑48的顶级流程图在步300开始,其中检查是否收到来自服务器80(图1)的开始指令。如果没有收到,则逻辑48退出。如果收到开始指令,则步302请求并接收所需参数,以便进行自动校准,如后所述。
接着,一系列的步骤304设置KI=0,KP=KP-INIT,GC=2πFOL以及IdREF的值,如下所述。此外,步304设置变量COUNT=0,MODE1=1,BRK=1,其约束制动37(图1),并锁住转子。
使用来自电机铭牌或/与电机数据单的信息计算KP-INIT。如上所述,希望KP等于电机电感L,作为初始值,KP-INIT根据电机瞬变电感Lσ的近似值设置,其根据电机的“基本”电感(L_BASE)使用下式被近似计算:
KP-INIT=0.1xL-BASE
L-BASE包括激磁电感(LM)和瞬变电感(Lσ),并且Lσ大约是LM的10-20%。如果需要,可以使用不为0.1的系数。使用下式由电机铭牌数据计算L_BASE:
Z_BASE=(PWR_RATED)/(VLL_RATED)2
L_BSDR=Z_BASE/(2πHZ_RATED)
其中PWR_RATED是以瓦计的电机轴额定功率;RPM_RATED是以RPM计的电机额定转速;VLL_RATED是以V计的额定线电压的有效值;HZ_RATED是以赫兹计的额定频率。
IdREF被设置如下:
IdREF=0.25xI-BASE其中I_BSDR是由铭牌数据按照(PWR_RATED)/((3)1/2xVLL_RATED)。如果需要,也可以使用IdREF的其它设置,只要在电机中产生磁通的合适的值即可。
KP-INIT和IdREF的值可以由逻辑48使用由维护人员输入到服务器80的铭牌参数RPM_RATED,VLL_RATED,HZ_RATED,RPM_RATED进行计算,并经过链路82送到逻辑48。此外,KP-INIT和IdREF的值可以由维护人员计算并输入到服务器80,并且通过链路82送到逻辑48。
接着,在步310,设置IqREF等于其测试频率FOL等于所需的开环截止频率的正弦波,例如180至333Hz。如果需要,也可以使用其它频率。正弦波由信号处理器以数字方式产生,例如数字信号处理器,如摩托罗拉DSP 56002处理器,更新(或采样)速率为5KHz。也可以使用其它的硬件与/或软件技术或更新速率来产生正弦输入信号。
下一步312分别监测在线118,116上的信号IqERR和Iq,并使用上述的数字信号处理器进行各个信号IqERR和Iq的离散富氏变换(DFT),从而获得信号IqERR和Iq的基波或一次谐波的幅值(IqMAG,IqERR -MAG),以便计算开环增益。使用一次谐波计算开环增益,从而使控制系统中的非线性不使计算失真。来自DFT的测量信号的基波或一次谐波分量是Asin(ωt)+Bcos(ωt),其中ω是测试频率(2πFOL)。下一步314通过已知公式(A2+B2)1/2计算一次谐波的幅值。
为了计算DFT,如所公知的,在逻辑48内产生具有测试频率的单位振幅的标准正弦波和余弦波。测量的信号(IqERR,Iq)乘以标准的正弦波,并把乘积在一个激磁周期内积分,从而产生信号的富氏系数A。由标准的余弦波乘以信号并进行积分而产生系数B。我们发现,在输入信号的15个周期内积分便足以滤除系统响应中的任何瞬变分量。这也适用于对闭环增益而进行的DFT,如后所述。如果需要,也可以使用其它的周期数。此外,如果需要,也可使用其它类型的富氏变换,例如快速富氏变换(FFT)等,只要获得所需信号的一次谐波即可。此外,代替富氏变换,可以使用任何其它的滤波或频谱分析技术来确定所需信号的一次谐波。
接着,步316计算开环增益GOL,即电流反馈信号IqMAG的幅值和电流环误差IqERR-MAG的幅值之比。
接着,步318检查GOL是否在1的+/-0.5%(即+/-0.005)之内。也可以使用其它允差。如果不在,步320则检查COUNT是否大于或等于10,即循环是否已经至少迭代过10次。如果是,则步322设FAULT=1,并通过串行链路82发送到服务器(图3),并在步324设MODE1=0,BRK=0,然后逻辑退出。如果逻辑迭代次数小于10,则在步326检查GOL是否大于1。如果是,则在步328使KP减少预定的量。如果GOL小于1,则在步330使KP增加预定的量。在每种情况下,下一步332使计数器COUNT加1,并且逻辑进入步310,利用新的KP值重新计算。
对KP进行迭代的一种方法是使用对分搜索技术,其中KP的值通过将其设置等于在每次测试之后的上下边界的平均值来确定。上下边界被调整,以便每次使搜索间隔减少2倍,直到获得所需的门限值为止。例如,上边界KP-UPPER=3KP-INIT,下边界KP-LOWER=0,并且KP=(KP-UPPER+KP-LOWER)/2。如果KP要被增加(步330),则下边界被增加到KP-LOWER=KP,如果KP要被减少(步328),则上边界被减少到KP-UPPER=KP。然后,根据修改的上下边界计算KP的下一个值。
此外,每次迭代KP可以改变一个小的量,例如1%,直到达到所需的允差。如果需要,也可以使用在所需的时间内收敛的任何其它搜索技术。
如果在步318 GOL的值在所需的预定允差内,则根据对正弦输入频率的所需的闭环频率响应确定积分增益KI。具体地说在一系列步骤340设COUNT=0,KI=KI-INT。
为了确定KI的值,将KP的值设为在上述处理的第一步中确定的值,并把KI设为初始值KI-INT。因为需要使KI等于电机电阻R,所以KI-INT的值被设置为R的一个计算值:
KIINT=1000X KP
也可以使用不等于1000的系数计算KI-INT。
接着,步342设IqREF2等于一个正弦波,其测试频率FCL=0.8FOL,等于所需的闭环带宽,并且IdREF仍然按以前设置。正弦波按上述步310的开环测试的方法产生。
下一步344监测在线116上的反馈电流信号Iq,并计算信号Iq的离散富氏变换(DFT),以便获得信号Iq的基波或一次谐波的幅值(IqMAG),用于计算闭环增益,使得控制系统中的非线性不会使计算失真,上述方式和上面讨论的用于开环增益的计算类似。众所周知,来自DFT的测量信号的基波或一次谐波分量是x=Asin(ωt)+Bcos(ωt),其中ω是测试频率(2πFCL)。下一步346通过已知公式(A2+B2)1/2计算一次谐波的幅值。关于DFT的积分周期的数量和上面讨论的相同。
接着,步348计算闭环增益GCL,即电流反馈信号IqMAG的幅值和输入电流环参考信号IqMAG(其由逻辑48提供,因而不需测量)的幅值之比。
接着,步350检查GOL是否在1的+/-6%内。也可以使用其它允差。如果不在,步352则检查COUNT是否大于或等于10,即循环是否已经至少迭代过10次。如果是,则步354设FAULT=1,并通过串行链路82发送到服务器(图3),并在步324设MODE1=0,BRK=0,然后逻辑退出。如果逻辑迭代次数小于10,则在步356检查GCL是否大于1。如果是,则在步360使KI减少预定的量。如果GCL小于1,则在步358使KI增加预定的量。在每种情况下,下一步362使计数器COUNT加1,并且逻辑进入步342,利用新的KI值重新计算。
对KI进行迭代的一种方法是使用和上述的关于KP的迭代类似的对分搜索技术,其中KI的值通过将其设置等于在每次测试之后的上下边界的平均值来确定。上下边界被调整,使得每次使搜索间隔减少2倍,直到获得所需的门限值为止。例如,上边界KI-UPPER=2KI-INIT,下边界KI-LOWER=0,则KI=(KI-UPPER+KI-LOWER)/2。如果KI要被增加(步358),则下边界被增加到KI-LOWER=KI,如果KI要被减少(步360),则上边界被减少到KI-UPPER=KI。然后,根据修改的上下边界计算KI的下一个值。
此外,每次迭代KI可以改变一个小的量,例如1%,直到达到所需的允差。如果需要,也可以使用在所需的时间内收敛的任何其它搜索或迭代技术。
我们发现,以上讨论的关于KP和KI的对分搜索在大约8次迭代内便以足够的精度收敛;不过,如果需要可以使用或多或少的迭代次数。
如果在步350GCL的值在所需的预定允差内,则在步364设置DONE标记等于1,并通过串行链路82将其送到服务器80,在步324设MODE1=0,BRK=0,并且使逻辑退出。
如果需要,可以使用其它的闭环带宽和开环截止频率以及其它的输入频率,例如,如果需要,对于两个计算,输入频率可以等于FOL。
虽然使用磁场定向驱动装置20对本发明进行了说明,但本发明适用于不是磁场定向的任何类型的驱动装置,只要参考电流,电流误差,和反馈电流被逻辑48读出即可。
虽然参照示例的实施例对本发明进行了说明,但是本领域的技术人员应该理解,不脱离本发明的构思可以作出各种其它的改变、省略和增加。
Claims (10)
1.一种用于计算电梯电机控制器电流调节器补偿的比例增益、积分器的积分增益以及整体增益的方法,所述控制器和电机形成一个电流环,所述方法包括以下步骤:
(a)在步骤(b)-(f)期间使积分器对控制器的输出维持在接近为零的数值;
(b)把比例增益设为一个初始值;
(c)根据第一测试频率设置整体增益;
(d)对电流调节器提供第一测试频率的正弦电流参考信号;
(e)计算在所述第一测试频率下的电流环的开环增益;
(f)改变所述比例增益并进行步(e),直到所述开环增益处于1的预定允差内;
(g)对电流调节器提供第二测试频率的所述正弦电流参考信号;
(h)计算在所述第二测试频率下的电流环的闭环增益;以及
(i)改变积分增益并进行步(h),直到闭环增益处于1的预定允差内。
2.如权利要求1所述的方法,其中所述以所述第一测试频率计算电流环的开环增益的步骤包括计算电流反馈信号的一次谐波对电流误差信号的一次谐波之比的步骤。
3.如权利要求2所述的方法,其中所述计算比的步骤包括:
计算所述电流误差信号的富氏变换;以及
计算所述电流反馈信号的富氏变换。
4.如权利要求1所述的方法,其中所述以所述第二测试频率计算电流环的闭环增益的步骤包括计算电流反馈信号的一次谐波对电流参考信号的一次谐波之比的步骤。
5.如权利要求4所述的方法,其中所述计算一次谐波比的步骤包括:
计算所述电流参考信号的富氏变换;以及
计算所述电流反馈信号的富氏变换。
6.如权利要求1所述的方法,其中所述比例增益的初值是0.2xL_BASE,其中L_BASE使用下式计算:
Z_BASE=(PWR_RATED)/(VLL_RATED)2
L_BASE=Z_BASE/(2πHZ_RATED)
其中PWR_RATED是以瓦计的电机轴额定功率;
RPM_RATED是以RPM计的电机额定转速;
VLL_RATED是以V计的额定线电压的有效值;
HZ_RATED是以赫兹计的额定频率。
7.如权利要求1所述的方法,其中所述电机是三相感应电动机。
8.如权利要求1所述的方法,其中所述电机控制器是磁场定向的控制器。
9.如权利要求1所述的方法,其中所述步(a)-(h)在收到来自服务器的指令时被自动地进行。
10.如权利要求1所述的方法,其中所述第一测试频率是所需的开环截止频率,所述第二测试频率是所需的闭环带宽。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/996234 | 1997-12-22 | ||
| US08/996,234 US5880415A (en) | 1997-12-22 | 1997-12-22 | Automatic calibration of current regulator control compensation for an elevator motor drive with locked rotor |
| US08/996,234 | 1997-12-22 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1229761A CN1229761A (zh) | 1999-09-29 |
| CN1145577C true CN1145577C (zh) | 2004-04-14 |
Family
ID=25542657
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB981255310A Expired - Fee Related CN1145577C (zh) | 1997-12-22 | 1998-12-21 | 用于转子锁住电梯电机驱动的电流调节器控制补偿的自动校准 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5880415A (zh) |
| EP (1) | EP0924850B1 (zh) |
| JP (1) | JP4189071B2 (zh) |
| CN (1) | CN1145577C (zh) |
| DE (1) | DE69834798T2 (zh) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3291224B2 (ja) * | 1997-06-30 | 2002-06-10 | オークマ株式会社 | 速度制御装置 |
| DE19734208A1 (de) * | 1997-08-07 | 1999-02-11 | Heidenhain Gmbh Dr Johannes | Verfahren und Schaltungsanordnung zur Ermittlung optimaler Reglerparamter für eine Drehzahlregelung |
| US5896954A (en) * | 1997-12-22 | 1999-04-27 | Otis Elevator Company | Automatic fine tuning of rotor time constant in field-oriented elevator motor drive |
| US5929400A (en) * | 1997-12-22 | 1999-07-27 | Otis Elevator Company | Self commissioning controller for field-oriented elevator motor/drive system |
| US5883344A (en) * | 1997-12-22 | 1999-03-16 | Otis Elevator Company | Automatic calibration of field-oriented elevator motor drive parameters using standstill motor measurements |
| US5909018A (en) * | 1997-12-22 | 1999-06-01 | Otis Elevator Company | Automatic fine-tuning of rotor time constant and magnetizing current in field-oriented elevator motor drive |
| US6711556B1 (en) | 1999-09-30 | 2004-03-23 | Ford Global Technologies, Llc | Fuzzy logic controller optimization |
| US6452360B1 (en) | 1999-12-03 | 2002-09-17 | Square D. Company | Auto tuning and parameter identification of a control circuit |
| US6622099B2 (en) * | 2000-08-14 | 2003-09-16 | Kollmorgen Corporation | Frequency domain auto-tune for an internal motor controller |
| JP4146141B2 (ja) * | 2002-03-12 | 2008-09-03 | 東芝エレベータ株式会社 | 振動調整装置および振動調整方法 |
| US6895352B2 (en) * | 2002-03-12 | 2005-05-17 | Itt Manufacturing Enterprises, Inc. | Simultaneous rapid open and closed loop bode plot measurement using a binary pseudo-random sequence |
| US6838852B1 (en) | 2003-04-01 | 2005-01-04 | General Motors Corporation | Plug and play electric machine |
| US7038417B1 (en) * | 2005-02-23 | 2006-05-02 | Certance Llc | Current control loop bias calibration by integration |
| JP4704182B2 (ja) * | 2005-10-20 | 2011-06-15 | 台達電子工業股▲ふん▼有限公司 | 電流センサレス交流サーボ駆動装置 |
| CN101707465B (zh) * | 2009-11-10 | 2012-05-30 | 深圳市雷赛机电技术开发有限公司 | 电机电流环参数整定方法 |
| US8587233B2 (en) * | 2010-01-25 | 2013-11-19 | Sntech, Inc. | Speed-defined torque control |
| US8965538B2 (en) * | 2010-05-19 | 2015-02-24 | The Boeing Company | Methods and apparatus for state limiting in a control system |
| US8942942B2 (en) * | 2010-07-23 | 2015-01-27 | Caterpillar Inc. | Generator set calibration controller |
| US8478550B2 (en) * | 2010-07-23 | 2013-07-02 | Caterpillar Inc. | Generator set calibration controller |
| TW201230657A (en) * | 2010-10-08 | 2012-07-16 | Panasonic Corp | Current control gain adjusting method for pm motor, current control method, and control device |
| JP5947075B2 (ja) * | 2012-03-23 | 2016-07-06 | Dmg森精機株式会社 | 同期モータの制御装置、同期モータの制御方法 |
| JP5888567B2 (ja) * | 2014-02-12 | 2016-03-22 | 株式会社デンソー | 交流電動機の制御装置 |
| US9618582B2 (en) | 2014-10-30 | 2017-04-11 | Delphi Technologies, Inc. | System and method of electric motor fault detection |
| JP6106226B2 (ja) | 2015-07-31 | 2017-03-29 | ファナック株式会社 | ゲインの最適化を学習する機械学習装置及び機械学習装置を備えた電動機制御装置並びに機械学習方法 |
| US10399823B2 (en) | 2015-08-31 | 2019-09-03 | Otis Elevator Company | Conveyor drive unit with initialization of the adaptive power supply unit and identification of the motor |
| FR3066276B1 (fr) * | 2017-05-10 | 2019-04-26 | Schneider Toshiba Inverter Europe Sas | Procede d'identification de la resistance electrique du rotor d'un moteur electrique |
| US11482942B2 (en) | 2017-10-31 | 2022-10-25 | Otis Elevator Company | Single phase operation of three phase regenerative drives |
| CN108657893B (zh) * | 2018-05-28 | 2020-07-28 | 苏州汇川技术有限公司 | 一种电梯救援方法、系统以及控制器 |
| CN111913104B (zh) | 2019-05-08 | 2023-01-13 | 博格华纳公司 | 用于电动马达的调试过程中确定马达参数的方法 |
| TW202206952A (zh) * | 2020-08-07 | 2022-02-16 | 永大機電工業股份有限公司 | 決定電梯速度控制係數的方法 |
| WO2024132759A1 (en) * | 2022-12-20 | 2024-06-27 | Assa Abloy Entrance Systems Ab | Automatic entrance barrier system with dc motor |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5223778A (en) * | 1992-09-16 | 1993-06-29 | Allen-Bradley Company, Inc. | Automatic tuning apparatus for PID controllers |
| US5476158A (en) * | 1993-03-31 | 1995-12-19 | Otis Elevator Company | Rotor time constant adaptation for induction motor in vector controlled elevator drive |
| FR2731568B1 (fr) * | 1995-03-09 | 1997-04-18 | Alsthom Cge Alcatel | Correcteur, dispositif et procede pour la commande du couple electromagnetique d'une machine asynchrone |
| US5896954A (en) * | 1997-12-22 | 1999-04-27 | Otis Elevator Company | Automatic fine tuning of rotor time constant in field-oriented elevator motor drive |
| US5883344A (en) * | 1997-12-22 | 1999-03-16 | Otis Elevator Company | Automatic calibration of field-oriented elevator motor drive parameters using standstill motor measurements |
| US5929400A (en) * | 1997-12-22 | 1999-07-27 | Otis Elevator Company | Self commissioning controller for field-oriented elevator motor/drive system |
| US5909018A (en) * | 1997-12-22 | 1999-06-01 | Otis Elevator Company | Automatic fine-tuning of rotor time constant and magnetizing current in field-oriented elevator motor drive |
-
1997
- 1997-12-22 US US08/996,234 patent/US5880415A/en not_active Expired - Lifetime
-
1998
- 1998-12-17 JP JP35876498A patent/JP4189071B2/ja not_active Expired - Lifetime
- 1998-12-18 EP EP98310406A patent/EP0924850B1/en not_active Expired - Lifetime
- 1998-12-18 DE DE69834798T patent/DE69834798T2/de not_active Expired - Lifetime
- 1998-12-21 CN CNB981255310A patent/CN1145577C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP0924850B1 (en) | 2006-06-07 |
| US5880415A (en) | 1999-03-09 |
| EP0924850A2 (en) | 1999-06-23 |
| DE69834798D1 (de) | 2006-07-20 |
| JP4189071B2 (ja) | 2008-12-03 |
| EP0924850A3 (en) | 2000-05-10 |
| JPH11252964A (ja) | 1999-09-17 |
| DE69834798T2 (de) | 2007-06-06 |
| CN1229761A (zh) | 1999-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1145577C (zh) | 用于转子锁住电梯电机驱动的电流调节器控制补偿的自动校准 | |
| CN1090404C (zh) | 利用静止电机测量的磁场定向电梯电机驱动参数的自动校准 | |
| CN1084959C (zh) | 磁场定向电梯电机驱动中转子时间常数和磁化电流的自动微调 | |
| US7321211B2 (en) | Power variation control system for cyclic loads | |
| JPH11252965A (ja) | 界磁有向性エレベ―タモ―タ/駆動システム用セルフ―コミッションニング制御装置 | |
| CN1784824A (zh) | 永久磁铁式同步电动机的控制装置 | |
| Shreelakshmi et al. | Trajectory optimization for loss minimization in induction motor fed elevator systems | |
| CN1193497C (zh) | 异步电机转动惯量辨识方法 | |
| CN1174906C (zh) | 场定向电梯电机驱动中转子时间常数的自动微调 | |
| CN103647493B (zh) | 一种永磁同步电机的h无穷转速估计方法 | |
| CN103762925B (zh) | 采用免疫算法的永磁同步电机的h∞转速估计方法 | |
| CN105429523B (zh) | 一种塔式抽油机的控制方法及装置 | |
| CN106330041B (zh) | 基于磁链观测的混合励磁式无轴承发电机直接预测控制器 | |
| CN102822078B (zh) | 用于电梯的电力驱动器的启动的方法和装置 | |
| Ta et al. | Efficiency maximization of induction motor drives for electric vehicles based on actual measurement of input power | |
| CN103253565B (zh) | 电梯及其运行速度设置的方法和装置 | |
| Blanuša et al. | Optimal flux control of elevator drive | |
| CN118300457B (zh) | 绞盘无刷电机运行精度优化方法 | |
| CN118316338B (zh) | 绞盘无刷电机运行控制方法及装置 | |
| Kobayashi et al. | Induction motor speed sensor-less vector control with the mechanical simulator with disturbance torque compensation | |
| EP2623767B1 (en) | Method and controller for turning a hub of a wind turbine | |
| JPH11332299A (ja) | 界磁有向性エレベータモータ駆動における回転子時定数と磁化電流の自動微同調 | |
| Singh et al. | Sliding mode control of a mechanical speed sensorless dc motor drive fed from a current controlled chopper | |
| CN1767356A (zh) | 直流无刷电机的速度控制装置及其方法 | |
| JPH09235079A (ja) | 直流エレベータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20040414 Termination date: 20171221 |