CN113798604B - 一种数控机床 - Google Patents
一种数控机床 Download PDFInfo
- Publication number
- CN113798604B CN113798604B CN202111124452.7A CN202111124452A CN113798604B CN 113798604 B CN113798604 B CN 113798604B CN 202111124452 A CN202111124452 A CN 202111124452A CN 113798604 B CN113798604 B CN 113798604B
- Authority
- CN
- China
- Prior art keywords
- machine tool
- box
- axis
- workpiece
- numerical control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23F—MAKING GEARS OR TOOTHED RACKS
- B23F23/00—Accessories or equipment combined with or arranged in, or specially designed to form part of, gear-cutting machines
- B23F23/02—Loading, unloading or chucking arrangements for workpieces
- B23F23/04—Loading or unloading arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23F—MAKING GEARS OR TOOTHED RACKS
- B23F23/00—Accessories or equipment combined with or arranged in, or specially designed to form part of, gear-cutting machines
- B23F23/12—Other devices, e.g. tool holders; Checking devices for controlling workpieces in machines for manufacturing gear teeth
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23F—MAKING GEARS OR TOOTHED RACKS
- B23F23/00—Accessories or equipment combined with or arranged in, or specially designed to form part of, gear-cutting machines
- B23F23/12—Other devices, e.g. tool holders; Checking devices for controlling workpieces in machines for manufacturing gear teeth
- B23F23/1237—Tool holders
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Machine Tool Units (AREA)
Abstract
本发明公开了一种数控机床,其包括机床主体、回转箱、工件箱体、刀具箱体总成、平衡缸和平衡臂;机床主体朝向工件箱体的侧壁还设置有让位凹口,当刀具箱体总成位于切齿工况时,工件箱体能够全部或者部分收容于让位凹口,以便安装于刀具箱体总成的刀盘上的切齿加工位置位于该刀盘中心内侧;这样回转轴的长度较短,其靠近工件箱体一侧无需设置静压轴承,可以将用于检测回转轴旋转角度的检测装置安装于该端部,提高加工稳定性和检测精确度,并且通过平衡缸和平衡臂的配合抵消实现工件箱体的偏心扭矩,提高了数控机床工作稳定性。
Description
技术领域
本发明涉及机加工设备技术领域,特别涉及一种数控机床。
背景技术
螺旋锥齿轮需要通过数控机床进行铣齿加工、磨齿加工,如本申请人拥有的申请号为CN201120199943.3的中国发明专利公开的一种螺旋锥齿轮加工机床所公开的结构,其中刀具与工件在安装于机床上的时候为上下分布,工件位于刀具下方,参照图11和图12,在进行左旋齿轮切齿时,第一回转轴箱体1控制工件箱2逆时针转到负方向角度,刀盘3的切齿位置位于刀盘3的外侧,即靠近工作台部分,X轴和Y轴需往正方向运动到切齿位置。参照图13和图14,在进行右旋齿轮切齿时,第一回转轴箱体1控制工件箱2顺时针转到正方向角度,刀盘3的切齿位置位于刀盘3的外侧,即靠近工作台部分,X轴需往负方向运动、Y轴需往正方向运动到切齿位置。这种结构设置及与基于该结构进行的加工,工件箱2与床身固定体之间的距离较大,传动稳定性较差,对于机床的结构强度要求较高。并且为了确保工件箱2的转动稳定性,在第一回转轴箱体1内对应第一回转轴靠近工件箱2的一端需要设置静压轴承,而用于检测第一回转轴旋转角度的光栅检测装置只能设置于第一回转轴远离工件箱2的一端,由于对应的驱动一般也作用于第一回转轴远离工件箱2的一端,因此光栅检测结果与工件箱2实际的转动角度存在偏差,影响加工质量。
发明内容
为解决上述技术问题,本发明提供一种数控机床,包括以下部件:机床主体、回转箱、工件箱体和刀具箱体总成;所述刀具箱体总成支撑于所述机床主体并且至少其刀盘能够沿X轴方向和Z轴方向相对所述机床主体运动,所述回转箱支撑于所述机床主体并且能够沿Y轴方向相对所述机床主体运动,所述工件箱体安装于所述回转箱的回转轴,所述回转轴轴线与Y轴平行,所述机床主体朝向所述工件箱体的侧壁还设置有让位凹口,当所述刀具箱体总成位于切齿工况时,所述工件箱体能够全部或者部分收容于所述让位凹口,以便安装于所述刀具箱体总成的刀盘上的切齿加工位置位于该刀盘中心内侧;
其中,所述X轴和Y轴在水平面内相互垂直,所述Z轴沿垂直于XY轴平面的竖直方向;
所述工件箱体的重心与所述回转轴轴线偏心设置;
还包括平衡缸和平衡臂,所述平衡臂的一端与所述回转轴铰接,另一端通过转动副连接所述平衡缸的活塞杆,所述平衡缸的缸体通过移动副安装于所述回转箱,所述平衡缸通过施加作用力于所述平衡臂以平衡所述工件箱体的质量所产生的偏心力矩。
使用本发明的数控机床对工件齿加工时,预将工件安装于工件箱体,因机床主体朝向工件箱体的一侧具有让位凹口,能够避让工件箱体以使得工件箱体能够全部或者部分位于该让位凹口,这样驱动刀具箱体总成中的刀盘沿X轴、Z轴运动能够使得刀盘中心以内的区域与工件接触以作为切齿加工位置,具体地运动可以参考上文描述。这样回转轴的长度比较短,提高工件箱体的稳定性。并且由于工件箱体与回转箱之间的距离得以减小,回转轴靠近工件箱体一侧无需设置静压轴承等支撑转动部件,从而可以将用于检测回转轴旋转角度的检测装置安装于该端部,进而提高控制的精确度,提高加工质量。
并且,平衡缸和平衡臂形成平衡机构,能够平衡工件箱体的质量所产生的偏心力矩,这大大增加了系统工作的稳定性。
可选的,所述机床主体设置有凹槽,所述凹槽至少朝向所述工件箱体一侧具有第一开口,所述回转轴的自由端部伸出所述第一开口连接所述工件箱体,所述回转箱至少部分位于所述凹槽内部,所述让位凹口设置于所述第一开口所处的所述机床主体的侧壁,所述刀具箱体总成位于所述工件箱体的上方。
可选的,所述凹槽的槽底壁和所述凹槽的顶壁均设置有沿Y轴方向延伸的Y轴导轨,并且所述凹槽的槽底壁和所述顶壁其中一者上的所述Y轴导轨的数量为两条,所述回转箱的外壁设置有与相应所述Y轴导轨配合滑动的滑道,三条所述Y轴导轨配置成三角分布形式,所述回转箱的回转轴位于三角形式的几何中心或者接近几何中心。
可选的,所述刀具箱体总成包括刀具箱体和滑台,所述刀具箱体安装于所述滑台且能够沿Z轴方向相对所述滑台运动;所述机床主体上设置有至少两条沿X轴方向延伸的X轴导轨,至少一条所述X轴导轨分布于所述机床主体的水平面、至少一条所述X轴导轨分布于所述机床主体的竖直面,所述滑台与所有所述X轴导轨均滑动配合。
可选的,当所述数控机床作为铣齿机时,还包括具有容腔的排屑器,所述容腔开口朝上,所述排屑器可移动的设置于所述工件箱体的下方;
或者,当所述数控机床作为磨齿机时,所述工件箱体的下方还设置有油箱,用于收集砂轮在磨齿过程中的磨削液;
或者,当所述数控机床作为磨齿机时,还设置有砂轮修整器,所述砂轮修整器设置于所述工件箱体上或者设置于所述机床主体上。
可选的,所述机床主体包括床身和立柱,所述立柱架设于所述床身上表面,二者相对表面分别开设有第一凹槽和第二凹槽,所述第一凹槽和所述第二凹槽围合形成所述凹槽,所述刀具箱体总成支撑于所述立柱。
可选的,所述工件箱体固定安装在回转轴外端面,所述数控机床还包括检测装置,位于所述回转箱靠近所述工件箱体的端部,所述检测装置用于检测所述回转轴靠近所述工件箱体轴段的旋转角度,所述检测装置安装在所述工件箱体与回转轴靠近所述工件箱体的轴承之间。
可选的,驱动所述刀具箱体总成动作的驱动部件、驱动所述工件箱体动作的驱动部件为直线电机、力矩电机、电机丝杆传动机构、油缸驱动机构、齿轮传动机构、曲柄连杆传动机构、蜗轮蜗杆传动机构中的一种或者几种。
可选的,还包括内置于所述回转箱的力矩电机,用于驱动所述回转轴转动。
可选的,包括水平导轨和竖直导轨,所述平衡缸的缸体可移动设置于所述水平导轨,所述平衡缸的活塞杆和所述平衡臂的连接端沿所述竖直导轨可移动。
可选的,还包括球头万向节和转轴,所述平衡缸的活塞杆的伸出端部球铰有球头万向节,所述转轴同时转动连接所述球头万向节、所述平衡臂和所述竖直导轨。
可选的,还包括竖直移动座,所述转轴通过连接轴承转动连接所述竖直移动座,所述竖直移动座与所述竖直导轨往复滑动配合。
可选的,还包括双电机机构,用于驱动所述回转轴转动。
附图说明
图1是本发明的第一种结构示意图;
图2是本发明的第二种结构示意图;
图3是X轴导轨的一种分布示意图;
图4是Y轴导轨的一种分布示意图;
图5是砂轮修整器的第一种设置示意图;
图6是砂轮修整器的第二种设置示意图;
图7和图8是本发明进行左旋齿轮加工时的一种示意图;
图9和图10是本发明进行右旋齿轮加工时的一种示意图;
图11和图12是传统结构进行左旋齿轮加工时的一种示意图;
图13和图14是传统结构进行右旋齿轮加工时的一种示意图;
图15是数控机床的另一方向的示意图;
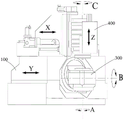
图16是标示出轴系的数控机床的示意图;
图17是本申请一种实施例中驱动工件箱体沿B轴回转的机构的局部示意图;
图18是本申请一种实施例中用于平衡工件箱体偏心矩的机构的局部连接示意图;
图19是本申请一种实施例中数控机床的局部示意图;
图20为图19中I处放大示意图。
其中,图1至图10、图15至图20中:
100床身,200立柱,101让位凹口,102Y轴导轨,103Y轴驱动轴,104凹槽、201X轴驱动轴,300工件箱体,400刀具箱体,500滑台,501Z轴驱动轴,600排屑器,601滚轮,700回转箱,301砂轮修整器,302油泵,303油箱;304回转轴;305轴承;306力矩电机;801平衡缸;802水平移动座;803水平导轨;804竖直导轨;805竖直移动座;806平衡臂;807连接轴承;80a球头万向节;80b转轴;900电机。
其中,图11至图14中:
1第一回转轴箱体,2工件箱,3刀盘。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
参照图1至图6、图15,本发明提出一种数控机床,包括机床主体10、回转箱、工件箱体和刀具箱体总成40。
在一种具体实施例中,数控机床包括:
床身100,床身100上沿水平Y轴方向开设有凹槽104并于凹槽104内设置有Y轴驱动轴103;
立柱200,架设于凹槽上方,立柱200上设置有水平的X轴驱动轴201,立柱200与凹槽的一个端部之间沿Y轴方向内凹形成有让位凹口101。
从以上描述和附图,本领域内技术人员不难得到,立柱200固定支撑于床身100,二者相对固定形成机床主体10,此处需要解释的是,本文的机床主体10为数控机床固定安装于地面或者其他支撑面上,工作时不会相对地面或其他支撑面相对运动结构的总称,其为机床的其他零部件提供安装及支撑基础。
回转箱700,安装于Y轴驱动轴103上,并设置有回转轴304,回转轴304平行于Y轴;
工件箱体300,安装于回转轴304靠近让位凹口101的一端,并且工件箱体300能够全部或者部分收容于让位凹口101内,工件箱体300设置有垂直于Y轴的工件主轴;
滑台500,安装于X轴驱动轴201上,滑台500于靠近工件箱体300的侧面设置有竖直的Z轴驱动轴501;
刀具箱体400,安装于Z轴驱动轴501上,刀具箱体400内设置有刀具主轴,刀具主轴平行于Z轴。
采用上述结构设置的数控机床,通过让位凹口101的设置可以将工件箱体300靠近床身100移动,参照图7和图8,采用上述结构设置的数控机床进行左旋齿轮切齿加工时,可以控制回转轴顺时针转到正方向角度,刀盘的切齿位置位于刀盘内侧,即远离工作台部分,刀具箱体400沿X轴和工件箱体300沿Y轴需往负方向运动到切齿位置。参照图9和图10,在进行右旋齿轮切齿加工时,回转轴逆时针转到负方向角度,刀盘的切齿位置位于刀盘内侧,即远离工作台部分,刀具箱体400沿X轴需往正方向运动到切齿位置,工件箱体300沿Y轴需往负方向运动到切齿位置。故而本发明所要求保护的数控机床,可以将传统的位于刀盘外侧的加工点移动至刀盘的内侧,较传统结构而言可以减小回转轴的长度(即工件箱体300沿Y轴的调节长度),提高工件箱体300的稳定性。并且由于工件箱体300与回转箱700之间的距离得以减小,因此传统结构中设置于回转轴靠近工件箱体300一侧的静压轴承可以取消设置,而预留出光栅检测装置的安装位置,进而提高控制的精确度,提高加工质量。
请参考图10、图14、图16,关于刀盘内侧和刀盘外侧的定义如下:刀盘内侧是指刀盘靠近床身100的切削部;刀盘外侧是指刀盘远离床身100的切削部。沿Y方向,刀盘内侧距离床身100的距离比刀盘外侧距离床身100的距离近。图10为刀盘内侧与工件箱体300相对位置关系,图14为刀具外侧与工件箱体相对位置关系。
请参考图16,图16示出了各部件运动方向。刀具箱体400沿X轴往复运动,工件箱体300沿Y轴往复运动,刀具箱体400的主轴沿Z轴上下方向运动。工件箱体能够沿B轴和A轴正反旋转方向,刀具箱体400能够围绕轴C正反旋转。其中顺时针定义为正向,逆时针定义为反向。
在本发明的一些实施例中,回转箱700靠近工件箱体300的一端对应回转轴设置有光栅检测装置,光栅检测装置用于检测回转轴的旋转角度。由前述分析可知,本发明中的数控机床的回转箱700靠近工件箱体300的位置可以不设置静压轴承,因此可以用于安装光栅检测装置,从而提高回转轴的控制精度,进而提高加工质量。光栅检测装置参照相关现有技术进行设置即可,在此不作过多描述。
上述实施例中的回转轴靠近工件箱体300的一端无轴承支撑,从图中可看出,工件箱体300固定安装在回转轴304外端面,检测装置用于检测回转轴靠近工件箱体轴段的旋转角度,检测装置安装在工件箱体300与回转轴上靠近工件箱体300的轴承之间。虽然上述仅记载该位置可以安装光栅检测装置,但是从本文所要实现的技术效果和本领域内技术人员所掌握的基本知识,本领域内技术人员必然能够毫无疑义地知晓回转轴靠近工件箱体300的一端安装的检测装置不局限于光栅检测装置,回转轴靠近工件箱体300的一端设置的检测装置只要能够检测回转轴靠近工件箱体300轴段的旋转角度即可。也就是说,数控机床包括检测装置,位于回转箱靠近工件箱体的端部。
参照图4,在本发明的一些实施例中,床身100于凹槽的两侧对应回转箱700的下端面的区域设置有Y轴导轨102,同时立柱200对应回转箱700的顶部的区域也设置有Y轴导轨102,回转箱700滑动安装于Y轴导轨102上并通过Y轴驱动轴103驱动。在申请号为CN201120199943.3的中国发明专利公开的一种螺旋锥齿轮加工机床中,第一回转轴箱体相当于本发明中的回转箱700,但其中第一回转轴箱体与床身之间是通过底部的滑轨结构及相应驱动实现移动控制,第一回转轴与滑轨结构之间的距离较大,在工作过程中进行相应移动调节、转动调节的时候稳定性较差,工件箱对于滑轨结构及相应驱动的作用力较大,影响调节的顺畅性。而本实施例中Y轴导轨102与回转轴之间的距离较该专利中公开的结构而言得到极大地缩小,有利于结构、传动的稳定性。并且Y轴导轨102成三角分布形式分布在回转箱700的周侧,两侧的Y轴导轨102能够进行回转箱700支撑、顶部的Y轴导轨102能够实现吊装,结构稳定性强。具体地,回转箱700的回转轴在垂直于Y轴平面内的投影位于三条Y轴导轨在垂直于Y轴平面内的三角形投影的几何中心或接近几何中心。三条Y轴导轨配置成三角分布形式,将回转轴设置于三角分布形式的几何中心或者接近其几何中心,能够提高回转箱700运动的稳定性。本文中接近三角分布形式的几何中心是指位于其附近,为了满足回转箱700运动的稳定性。
参照图3,在本发明的一些实施例中,立柱200的上端面设置有一条X轴导轨202,立柱200靠近刀具箱体400的侧壁上设置有一条X轴导轨202,滑台500滑动安装于两条X轴导轨202上并通过X轴驱动轴201驱动。本实施例中通过直角分布形式的X轴导轨202来安装滑台500,可以通过水平面上的X轴导轨202来承载滑台500的重量,结构稳定性高,并且有利于提高装配效率。可以理解的是,在实际设置中也可以设置数量更多的X轴导轨202。
在本发明的一些实施例中,数控机床用于铣齿加工,故而该数控机床还包括排屑器600,排屑器600可移动地设置于工件箱体300的下方。具体的,在用于铣齿加工的时候,刀具主轴用于安装刀盘及铣齿刀,排屑器600用于收集铣齿过程中的废屑。可以在排屑器600的底部设置滚轮601来实现移动。本实施例中排屑器600的设置方便移出清理,较传统结构而言,工作过程中所需占用的面积更小,实用性强。
即,该排屑器600具有容腔,容腔的开口朝上,并且本发明中的排屑器600可移动的设置于工件箱体的下方,当刀盘对工件进行铣削加工之前,将排削器600移动至工件箱体下方,这样加工碎屑可以直接自开口落入容腔,当加工完成后,可以将排屑器600自工件箱体下方移走,提高作业灵活性。
在本发明的一些实施例中,数控机床用于磨齿加工,故而该数控机床还设置有砂轮修整器301以及油箱303,该油箱303设置于工件箱体300的下方区域,用于收集磨齿过程中的磨削液,并且可以同时设置油泵302,以实现磨削液循环。砂轮修整器301既可以设置于工件箱体300上,也可以设置于立柱200上。在进行磨齿加工时,刀具主轴用于安装砂轮。
砂轮修整器既适用于铣齿机也适用于磨齿机。在上述各实施例的记载内容基础上,本领域内技术人员不难理解滑台500和刀具箱体400形成刀具箱体总成40,从上文描述可以毫无疑义地得知,刀具箱体总成40支撑于机床主体10并且其刀盘能够沿X轴方向和Z轴方向相对机床主体10运动。上文中给出了设置滑台500带动刀盘沿X轴方向往复移动,刀具箱体400能够沿Z轴方向相对滑台500移动进而实现安装于刀具箱体400上的刀盘沿Z轴移动。对于本领域内技术人员而言,从以上描述不难得到实现上述技术效果的刀具箱体总成40的其他结构设置,对于本文“刀具箱体总成40支撑于机床主体10并且至少其刀盘能够沿X轴方向和Z轴方向相对机床主体10运动”这种概括也是合理的。
同样,从上文关于回转箱的记载,本领域内技术人员可以直接地、毫无疑义的得出:回转箱700支撑于机床主体10并且能够沿Y轴方向相对机床主体10运动,工件箱体300安装于回转箱的回转轴,回转轴能够围绕Y轴回转,机床主体10朝向工件箱体的侧壁还设置有让位凹口,当刀具箱体总成40位于切齿工况时,工件箱体300能够全部或者部分收容于让位凹口,以便安装于刀具箱体总成40的刀盘上的切齿加工位置位于该刀盘中心内侧,这可以从图8和图10中直接地毫无疑义地得出。刀盘上的切齿加工位置距离刀盘中心越远越好,图8和图10中均示出了刀盘切齿加工位置在刀盘的边缘位置。
需要说明的是,此处将靠近机床主体10的一侧定义为内侧,相应地,相反方向为外侧。
请参考图7、图8、图9和图10,其中,X轴和Y轴在水平面内相互垂直,Z轴沿垂直于XY方向的竖直方向。
使用本发明的数控机床对工件齿加工时,预将工件安装于工件箱体300,因机床主体10朝向工件箱体的一侧具有让位凹口101,能够避让工件箱体以使得工件箱体能够全部或者部分位于该让位凹口101,这样驱动刀具箱体总成40中的刀盘沿X轴、Z轴运动能够使得刀盘中心以内的区域与工件接触以作为切齿加工位置,具体地运动可以参考上文描述。这样回转轴的长度比较短,提高工件箱体300的稳定性。并且由于工件箱体300与回转箱700之间的距离得以减小,回转轴靠近工件箱体300一侧无需设置静压轴承等支撑转动部件,从而可以将用于检测回转轴旋转角度的检测装置安装于该端部,进而提高控制的精确度,提高加工质量。
在一种具体实施例中,机床主体10设置有凹槽,凹槽至少朝向工件箱体一侧具有第一开口,回转轴的自由端部伸出第一开口连接工件箱体,回转箱700至少部分位于凹槽内部,让位凹口101设置于第一开口所处的机床主体10的侧壁,刀具箱体总成40位于工件箱体300的上方。
如前文所述,为了方便回转箱700等各部件的安装,机床主体10可以包括床身和立柱,立柱架设于床身上表面,二者相对表面分别开设有第一凹槽和第二凹槽,第一凹槽和第二凹槽围合形成凹槽,刀具箱体总成40支撑于立柱,即立柱上加工有配合刀具箱总成中刀盘移动到位的导轨。回转箱700可以滑动安装于凹槽内部。第一凹槽、第二凹槽的具体结构可以根据具体应用环境而定,只要能够满足设备的正常工作即可,本文不做限定。
床身和立柱可以为可拆卸形式,提高机床组装方便性。
上文实施例中,凹槽的槽底壁和凹槽的顶壁均设置有沿Y轴方向延伸的Y轴导轨,并且凹槽的槽底壁和顶壁其中一者上的Y轴导轨的数量至少为两条,回转箱的外壁设置有与相应Y轴导轨配合滑动的滑道。
当凹槽包括第一凹槽和第二凹槽时,第一凹槽的槽底壁可以设置Y轴导轨,第二凹槽的部分槽壁形成凹槽的顶壁,第二凹槽同样也设置有Y轴导轨。第一凹槽的槽底壁设置有两个Y轴导轨,分别位于槽底壁靠近两侧壁区域位置,第二凹槽上的Y轴导轨的数量可以为一个,其位于回转箱700的中心竖直面,这样第一凹槽上和第二凹槽上的Y轴导轨可以配合对回转箱700起到稳定支撑和导向的作用。
请再次参考图8和图6,刀具箱体总成40中的刀具箱体安装于滑台,且刀具箱体400能够沿Z轴方向相对滑台运动;机床主体10上设置有至少两条沿X轴方向延伸的X轴导轨,至少一条X轴导轨分布于机床主体10的水平面、至少一条X轴导轨分布于机床主体10的竖直面,滑台滑动支撑于所有X轴导轨。图6和图8中示出了机床主体10顶壁设置一条X轴导轨,侧壁设置一条X轴导轨的具体实施方式。
在水平面和竖直面内同时设置X轴方向延伸的X轴导轨,各导轨同时对滑台运动导向,大大提高了滑台运动的顺畅性和稳定性。
本领域内技术人员应当理解,所有X轴导轨的数量、布置形式不局限于本文附图所示。
在本发明的一些实施例中,X轴驱动轴201、Y轴驱动轴103和Z轴驱动轴501采用直线电机、力矩电机、电机丝杆传动机构、油缸驱动机构、齿轮传动机构、曲柄连杆传动机构、蜗轮蜗杆传动机构中的一种进行驱动,这类结构均属于公知技术,故在此不作具体描述。
也就是说,驱动刀具箱体总成40动作的驱动部件、驱动工件箱体动作的驱动部件可以为直线电机、力矩电机、电机丝杆传动机构、油缸驱动机构、齿轮传动机构、曲柄连杆传动机构、蜗轮蜗杆传动机构中的一种或者几种。请参考图17和图18,在一种具体实施例中,数控机床还可以包括与工件箱体固连的回转轴304,回转轴304通过轴承305支撑于回转箱回转轴。工件箱体的回转轴线与回转轴304偏心设置,即工件箱体的回转轴线与回转轴304不同轴。数控机床还可以包括内置于机床主体的力矩电机306,用于驱动回转轴304转动。力矩电机306与回转轴304直连。力矩电机306驱动回转轴304转动进而实现工件箱体周向位置的改变。
通过内置于回转箱的力矩电机306改变工件箱体力矩,结构简单。
该实施例中,数控机床还可以包括平衡缸801和平衡臂806,平衡臂806的一端与回转轴304铰接,另一端通过转动副连接平衡缸801的活塞杆,平衡缸801的缸体通过移动副安装于机床主体,平衡缸801通过施加作用力于平衡臂以平衡工件箱体所产生的偏心力矩。
具体地,数控机床包括水平导轨803和竖直导轨804,平衡缸801的缸体可移动设置于水平导轨803,即平衡缸801可以沿水平导轨803运动以改变水平位置。具体地,可以设置专门的水平移动座802,水平移动座802与水平导轨803滑动配合,平衡缸801的缸体固定安装于水平移动座802。平衡缸801的活塞杆和平衡臂806的连接端沿竖直导轨804可移动。即平衡缸801的活塞杆与平衡臂806可以通过球铰和转轴连接形成的整体再活动连接于竖直导轨804的滑道。
请参考图19和图20,具体地,数控机床包括球头万向节80a和转轴80b,平衡缸801的活塞杆的伸出端部球铰有球头万向节80a,转轴80b同时转动连接球头万向节80a、平衡臂806和竖直导轨804竖直移动座805。
球头万向节80a与转轴80b配合连接的结构动作灵活性比较高,避免机构卡滞。
在一种具体实施例中,数控机床还可以包括竖直移动座805,转轴80b通过连接轴承807转动连接竖直移动座805,竖直移动座805与竖直导轨804往复滑动配合。
上述实施例中,转轴80b进一步通过连接轴承807转动连接竖直移动座805,转轴80b转动灵活性进一步提高,进而提高了机构运动灵活性。
这样,根据平衡臂806的位置,活塞杆可以沿竖直导轨804、缸体沿水平导轨803运动至适当位置,以施加推力于平衡臂806的外端部,以平衡工件箱体300质量产生的重力力矩。
如上所述,回转轴304和力矩电机306均设置于箱体内部。
这样力矩电机306、回转轴304、平衡臂806、平衡缸801等部件可以预先组装形成一个组件,避免现场组装,提高工作效率。
当然,回转轴的304的驱动方式不局限于本文描述,还可以为其他方式,请参考图2,设置双电机机构用于驱动回转轴转动。双电机机构包括两个电机900以及齿轮传递机构实现回转轴的驱动,齿轮机构的具体结构未示出但是并不妨碍本领域内技术人员对本文技术方案的理解。
以上对本发明所提供的一种数控机床进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
Claims (14)
1.一种数控机床,其特征在于,包括以下部件:机床主体、回转箱、工件箱体和刀具箱体总成;所述刀具箱体总成支撑于所述机床主体并且至少其刀盘能够沿X轴方向和Z轴方向相对所述机床主体运动,所述回转箱支撑于所述机床主体并且能够沿Y轴方向相对所述机床主体运动,所述工件箱体安装于所述回转箱的回转轴,所述回转轴的回转轴线与Y轴平行,所述机床主体朝向所述工件箱体的侧壁还设置有让位凹口,当所述刀具箱体总成位于切齿工况时,所述工件箱体能够全部或者部分收容于所述让位凹口,以便安装于所述刀具箱体总成的刀盘上的切齿加工位置位于该刀盘中心内侧;
其中,所述X轴和Y轴在水平面内相互垂直,所述Z轴沿垂直于XY轴平面的竖直方向;
所述工件箱体的重心与所述回转轴轴线偏心设置;
还包括平衡缸和平衡臂,所述平衡臂的一端与所述回转轴铰接,另一端通过转动副连接所述平衡缸的活塞杆,所述平衡缸的缸体通过移动副安装于所述回转箱,所述平衡缸通过施加作用力于所述平衡臂以平衡所述工件箱体的质量所产生的偏心力矩。
2.如权利要求1所述的数控机床,其特征在于,所述机床主体设置有凹槽,所述凹槽至少朝向所述工件箱体一侧具有第一开口,所述回转轴的自由端部伸出所述第一开口连接所述工件箱体,所述回转箱至少部分位于所述凹槽内部,所述让位凹口设置于所述第一开口所处的所述机床主体的侧壁,所述刀具箱体总成位于所述工件箱体的上方。
3.如权利要求2所述的数控机床,其特征在于,所述凹槽的槽底壁和所述凹槽的顶壁均设置有沿Y轴方向延伸的Y轴导轨,并且所述凹槽的槽底壁和所述顶壁其中一者上的所述Y轴导轨的数量为两条,所述回转箱的外壁设置有与相应所述Y轴导轨配合滑动的滑道,三条所述Y轴导轨配置成三角分布形式,所述回转箱的回转轴位于三角形式的几何中心或接近几何中心。
4.如权利要求1所述的数控机床,其特征在于,所述刀具箱体总成包括刀具箱体和滑台,所述刀具箱体安装于所述滑台且能够沿Z轴方向相对所述滑台运动;所述机床主体上设置有至少两条沿X轴方向延伸的X轴导轨,至少一条所述X轴导轨分布于所述机床主体的水平面、至少一条所述X轴导轨分布于所述机床主体的竖直面,所述滑台与所有所述X轴导轨均滑动配合。
5.如权利要求1所述的数控机床,其特征在于,当所述数控机床作为铣齿机时,还包括具有容腔的排屑器,所述容腔开口朝上,所述排屑器可移动的设置于所述工件箱体的下方;
或者,当所述数控机床作为磨齿机时,所述工件箱体的下方还设置有油箱,用于收集砂轮在磨齿过程中的磨削液;
或者,当所述数控机床作为磨齿机时,还设置有砂轮修整器,所述砂轮修整器设置于所述工件箱体上或者设置于所述机床主体上。
6.如权利要求2所述的数控机床,其特征在于,所述机床主体包括床身和立柱,所述立柱架设于所述床身上表面,二者相对表面分别开设有第一凹槽和第二凹槽,所述第一凹槽和所述第二凹槽围合形成所述凹槽,所述刀具箱体总成支撑于所述立柱。
7.如权利要求1至6任一项所述的数控机床,其特征在于,所述工件箱体固定安装在回转轴外端面,所述数控机床还包括检测装置,位于所述回转箱靠近所述工件箱体的端部,所述检测装置用于检测所述回转轴靠近所述工件箱体轴段的旋转角度,所述检测装置安装在所述工件箱体与回转轴上靠近所述工件箱体的轴承之间。
8.根据权利要求1至6任一项所述的数控机床,其特征在于:还包括内置于所述回转箱的力矩电机,用于驱动所述回转轴转动。
9.根据权利要求7所述的数控机床,其特征在于:还包括内置于所述回转箱的力矩电机,用于驱动所述回转轴转动。
10.根据权利要求1至6任一项所述的数控机床,其特征在于:包括水平导轨和竖直导轨,所述平衡缸的缸体可移动设置于所述水平导轨,所述平衡缸的活塞杆和所述平衡臂二者的连接端沿所述竖直导轨可移动。
11.根据权利要求7所述的数控机床,其特征在于:包括水平导轨和竖直导轨,所述平衡缸的缸体可移动设置于所述水平导轨,所述平衡缸的活塞杆和所述平衡臂二者的连接端沿所述竖直导轨可移动。
12.根据权利要求10所述的数控机床,其特征在于:还包括球头万向节和转轴,所述平衡缸的活塞杆的伸出端部球铰有球头万向节,所述转轴同时转动连接所述球头万向节、所述平衡臂和所述竖直导轨。
13.根据权利要求12所述的数控机床,其特征在于:还包括竖直移动座,所述转轴通过连接轴承转动连接所述竖直移动座,所述竖直移动座与所述竖直导轨往复滑动配合。
14.根据权利要求1至6任一项所述的数控机床,其特征在于:还包括双电机机构,用于驱动所述回转轴转动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111124452.7A CN113798604B (zh) | 2021-09-24 | 2021-09-24 | 一种数控机床 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111124452.7A CN113798604B (zh) | 2021-09-24 | 2021-09-24 | 一种数控机床 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113798604A CN113798604A (zh) | 2021-12-17 |
| CN113798604B true CN113798604B (zh) | 2022-12-13 |
Family
ID=78896730
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111124452.7A Active CN113798604B (zh) | 2021-09-24 | 2021-09-24 | 一种数控机床 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113798604B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116038039B (zh) * | 2023-03-27 | 2023-06-23 | 湖南中大创远数控装备有限公司 | 一种具有卸荷装置的齿轮加工机床 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB536997A (en) * | 1939-03-16 | 1941-06-04 | Fellows Gear Shaper Co | Generative gear cutting machines |
| JP4234515B2 (ja) * | 2003-07-15 | 2009-03-04 | 株式会社森精機製作所 | 工作機械 |
| CN202571495U (zh) * | 2012-05-08 | 2012-12-05 | 湖南中大创远数控装备有限公司 | 一种齿轮加工机床 |
| CN202684226U (zh) * | 2012-07-24 | 2013-01-23 | 天津第一机床总厂 | 大型圆柱齿轮数控开齿机 |
| CN102848030B (zh) * | 2012-08-29 | 2015-06-10 | 秦川机床工具集团股份公司 | 一种螺旋锥齿轮加工机床 |
| CN202922042U (zh) * | 2012-12-14 | 2013-05-08 | 天津精诚机床股份有限公司 | 一种数控磨齿机 |
| CN105364190B (zh) * | 2015-12-04 | 2017-11-17 | 湖南中大创远数控装备有限公司 | 一种螺旋锥齿轮加工机床 |
| CN111975135A (zh) * | 2020-07-29 | 2020-11-24 | 湖南中大创远数控装备有限公司 | 一种数控齿轮加工机床 |
-
2021
- 2021-09-24 CN CN202111124452.7A patent/CN113798604B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN113798604A (zh) | 2021-12-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN215966728U (zh) | 一种齿轮加工机床 | |
| US9604289B2 (en) | Long reach spindle drive systems and method | |
| WO2022036797A1 (zh) | 一种数控机床 | |
| CN113798604B (zh) | 一种数控机床 | |
| CN212122620U (zh) | 一种一次性自动磨削平面和刀口的磨床 | |
| US4998353A (en) | Reciprocating tool | |
| CN111958058B (zh) | 一种多工位数控磨齿机 | |
| CN211804803U (zh) | 一种立卧式组合加工设备 | |
| CN116276607B (zh) | 一种曲轴抛光设备 | |
| CN210677201U (zh) | 一种铣齿机 | |
| CN111468995A (zh) | 一种一次性自动磨削平面和刀口的磨床 | |
| WO1990006214A1 (en) | An arrangement for bringing the tool-carrying end of a robot beam to a desired one of a plurality of possible, predetermined positions | |
| CN213054298U (zh) | 转盘式陶瓷平面研磨机 | |
| JP3508230B2 (ja) | 工作機械 | |
| CN108857836A (zh) | 一种用于金属制品的抛光设备 | |
| CN105983861A (zh) | 回转导轨传动机构及应用该机构的机床 | |
| CN210549681U (zh) | 夹持装置和加工中心 | |
| CN209550784U (zh) | 一种滑动轴承倒角装置 | |
| CN114310649A (zh) | 一种研磨超精机 | |
| CN209919308U (zh) | 一种全自动数控铣磨机床 | |
| US5388934A (en) | Machine tools | |
| CN218533679U (zh) | 一种工件加工夹具 | |
| CN218427699U (zh) | 一种大齿宽砂轮连续修整机构 | |
| CN117182121B (zh) | 五轴加工设备 | |
| CN221735590U (zh) | 一种高精度磨刀机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |