CN113445708A - 高层建筑防风型智能墙面喷涂机器人 - Google Patents
高层建筑防风型智能墙面喷涂机器人 Download PDFInfo
- Publication number
- CN113445708A CN113445708A CN202110917745.4A CN202110917745A CN113445708A CN 113445708 A CN113445708 A CN 113445708A CN 202110917745 A CN202110917745 A CN 202110917745A CN 113445708 A CN113445708 A CN 113445708A
- Authority
- CN
- China
- Prior art keywords
- machine body
- wall surface
- screw rod
- arm
- spraying
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04F—FINISHING WORK ON BUILDINGS, e.g. STAIRS, FLOORS
- E04F21/00—Implements for finishing work on buildings
- E04F21/02—Implements for finishing work on buildings for applying plasticised masses to surfaces, e.g. plastering walls
- E04F21/06—Implements for applying plaster, insulating material, or the like
- E04F21/08—Mechanical implements
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Spray Control Apparatus (AREA)
- Manipulator (AREA)
Abstract
本发明公开了一种高层建筑防风型智能墙面喷涂机器人,由上机体和下机体构成,其上机体在楼顶工作,上机体通过绳索连接下机体并控制下机体竖向及横向移动;下机体通过各吸附足固定在墙面上,各吸附足中的中间足和边沿足交替运动能够保证在强风条件下机器人能够正常工作;装载在下机体的喷枪具有多个自由度,大大提高了灵活性。本发明具有抗风性能强、喷涂动作灵活度高、安全系数高等优势,相较同类产品本发明在安全性能、喷涂质量和工作效率上均得到大幅提升。
Description
技术领域
本发明涉及喷涂装置,更具体地说是一种高层建筑防风型智能墙面喷涂机器人。
背景技术
建筑外壁瓷砖脱落会严重威胁人员的生命安全,已有相关规定:禁止在100米以上建筑使用瓷砖等石材,越来越多的高层建筑,特别是高层住宅,在平衡美观与安全上使用原石漆。由工人通过吊篮进行手动喷涂的传统人工作业方式严重存在着工作效率低、安全隐患大,对工人的身体健康造成危害,涂层不够均匀等问题。
中国专利CN 211114662 U,公布日2020.07.28,其公开了一种高楼外壁装饰智能多功能喷涂机,包括吊篮和提升装置,实现外壁的智能喷涂和避障功能。在实际应用中,该装置与外壁无依附关系,存在工作时吊篮易晃动问题,且难以实现吊篮的左右移动,施工步骤繁琐。
中国专利CN 111364736 A,公布日2020.07.03,其公开了一种具备定位功能的建筑外壁喷涂装置,包括喷涂机器人、多通道喷涂组件、储料仓、泵以及控制器等;能够实现爬升、自动喷涂等功能;但在实际应用中,其依靠海绵吸盘与墙体固定的方式存在可靠性问题,爬升装置不具有防风功能使作业过程在遇风时存在安全隐患。
中国专利CN210478871 U,公布日2020.05.08,其公开了一种爬墙清洗机器人,包括下梁骨架、单片机和吸盘机构等装置;实际应用中,因其仅仅依靠吸盘固定机器人位置,存在可靠性问题,不具备防风能力。
中国专利CN109736546 A、公开日2019.05.10,其公开了一种用于外壁面刮灰、喷涂、清洗的模块化多功能机器人,包括基座控制机器人和作业机器人两部分。通过基座控制机器人伸缩的吊装支架,在缆绳控制下控制作业机器人的移动;其作业机器人根据传感器的检测在需要施工区域进行施工作业。实际应用中,作业机器人在升降过程和工作过程中与外壁均无依附,不具备防风能力,易发生晃动,存在安全隐患;作业机器人与墙面没有支撑,风力或者喷涂反冲会导致作业机器人与墙面发生碰撞,发生危险。
发明内容
本发明是为避免上述现有技术所存在的不足,提供一种自控程度高、抗风能力强、安全系数高的高层建筑防风型智能墙面喷涂机器人,以切实提高喷涂质量和工作效率。
本发明为实现发明目的采用如下技术方案:
本发明高层建筑防风型智能墙面喷涂机器人的特点是:
所述机器人由上机体和下机体组成,上机体工作在建筑物的楼顶上,下机体吸附工作在墙面上;
所述上机体是利用设置在上机体底板的底部的左右两对万向轮组在楼顶上移动,使下机体能够在楼顶上实现移动;
在所述上机体上设有卷扬机构,是由卷扬电机通过传动结构驱动卷筒,绳索的一端缠绕在卷筒上,另一端经安装在上机体机械臂上的定滑轮转向与下机体上的吊环螺钉相连,由绳索提吊下机体的竖向移动;所述上机体机械臂是由大臂和小臂铰接构成的悬伸的机械臂,可伸缩的大臂液压杆支撑在大臂前端,可伸缩的小臂液压杆支撑在大臂与小臂之间,用于控制机械臂的悬伸长度;
所述下机体是以外壳为载体设置行走机构和吸附机构,行走机构上装载喷涂机构;
所述行走机构由外围结构和丝杆模组构成;
所述外围结构为一矩形框架,矩形框架的各边框设置为由直线导轨和辅助梁构成的导向结构,在直线导轨上适配导轨滑块;所述矩形框架中一对呈X向的边框构成X向导向结构,一对呈Y向的边框构成Y向导向结构,相邻两边框之间利用连接块固定连接;
所述丝杆模组是在具有“十”卡槽的限位块上呈“十”字安装横向丝杆和竖向丝杆,在所述限位块的内外两侧各设置内支架和外支架构成载物平台,所述喷涂机构装载在所述载物平台上,所述横向丝杆和竖向丝杆的两端一一对应地固定在矩形框架中相应边框中的导轨滑块上;设置电机和减速器用于通过丝杆模组控制载物平台在矩形框架中的移动;
在所述内支架和连接块上设置用于吸附墙面的吸附足,分别是设置在内支架上的中间足和设置在各连接块上的边沿足;
所述喷涂机构是在固定板上设置由一节臂和二节臂串联构成的悬伸的喷涂机械臂,将所述一节臂和二节臂设置为铰接用于控制喷枪的喷涂角度;在载物平台上固定安装喷涂平台底板,所述固定板通过支撑轴与喷涂平台底板相连。
本发明高层建筑防风型智能墙面喷涂机器人的特点也在于:在所述上机体上卷扬机构中,在小臂的前端呈“T”形连接水平吊杆,水平吊杆的两端分别设置有定滑轮,所述卷筒以及绳索分设为左右两侧,左右两侧的绳索各自经水平吊杆上相应一端的定滑轮转向实现对下机体在两侧对称悬吊。
本发明高层建筑防风型智能墙面喷涂机器人的特点也在于:在所述上机体上设置呈“U”形环绕机械臂的平衡重物箱,所述平衡重物箱固定设置在旋转吊架座上,所述旋转吊架座是以上机体底板为支撑;利用平衡重物箱中内容物的重量保持上机体与下机体的重力平衡。
本发明高层建筑防风型智能墙面喷涂机器人的特点也在于:在所述上机体的底部左右两对万向轮组中,每对万向轮组是由前后各一只万向轮构成,每对万向轮组中的两只万向轮之间由方向传动轴相连接;设置驱动伺服电机用于驱动万向轮带动上机体移动,设置转动伺服电机用于驱动万向轮带动上机体调整方向。
本发明高层建筑防风型智能墙面喷涂机器人的特点也在于:构成所述喷涂机械臂的一节臂和二节臂均为并联的双臂;在所述喷涂机构的固定板的左右两侧各设置一组由伺服电机和涡轮盘构成的动力装置,其中右侧动力装置控制右侧一节臂的转动,左侧动力装置通过一节臂传动杆控制二节臂的转动,在所述喷涂机械臂中还设置有连接件以及二节臂传动杆构成机械联动结构。
本发明高层建筑防风型智能墙面喷涂机器人的特点也在于:
设置下机体中各吸附足的控制方式为:
方式一:各边沿足吸附,中间足松脱,使上机体中矩形框架与墙面固定,载物平台呈可移动;由电机驱动丝杆模组,实现载物平台在矩形框架内沿横向丝杆或竖向丝杆进行移位;
方式二:各吸附足均松脱,使下机体整体与墙面脱离,利用上机体中的卷扬机构对下机体进行整体提吊,实现下机体整体竖向移动;
方式三:各吸附足均松脱,使下机体整体与墙面脱离,由上机体中的行走机构带动,实现下机体的横向移动;
方式四:第一步各边沿足吸附、中间足松脱,使下机体中矩形边框与墙面固定,中间足与墙面脱离,利用电机正转驱动丝杆模组中竖向丝杆正向旋转,使载物平台沿竖向丝杆上移至顶端;第二步各边沿足松脱、中间足吸附,使下机体中矩形边框与墙面脱离,载物平台通过中间足与墙面固定,利用电机反转驱动丝杆模组中竖向丝杆反向旋转,使矩形边框沿竖向丝杆上移直至载物平台重新回位在竖向丝杆的底端,实现上机体整体向上一个步伐的移动;与方式四相应的方式能够实现上机体整体向下一个步伐的移动,以及向左或向右的一个步伐的移动。
与已有技术相比,本发明有益效果体现在:
1、本发明自控程度高、抗风能力强、安全系数高,能切实提高喷涂质量和工作效率;其下机体中的边沿足和中间足协同工作,配合上机体利用绳索对下机体进行平衡提吊,大大增强了其抗风能力,提高安全系数高;
2、本发明中喷枪的喷涂角度灵活,可应对各种不规则墙面的喷涂难题,避免出现死角;
3、本发明中上机体利用其底部的旋转吊架座能够直接转移到相邻的另一墙面的移动方式十分灵活,大大缩短了设备安装时间;
4、本发明在上机体中设置机械臂,通过调节机械臂的开合角度控制下机体与墙面之间的距离,有效避免发生碰撞,提高工作过程的安全性;
5、本发明中通过设置各类传感器和检测仪,通过人工操控能够实现智能控制,用于替代人工吊篮作业大大提高安全性和工作效率,能广泛应用于针对墙面的各种工作,包括墙体检测和喷洗工作。
附图说明
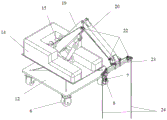
图1为本发明中机器人整体结构示意图;
图2为本发明机器人中的上机体立体结构示意图;
图3为本发明机器人中的上机体主视结构示意图;
图4为本发明机器人中的下机体结构示意图;
图5为本发明机器人中的下机体中行走机构结构示意图;
图6为本发明机器人中的中间足结构示意图;
图7为本发明机器人中的边沿足结构示意图;
图8为本发明机器人中喷涂装置立体结构示意图;
图9为本发明机器人中喷涂装置主视结构示意图;
图10为本发明机器人行走轨迹示意图;
图中标号:1上机体、2下机体、3墙面、4建筑物、5楼顶、6万向轮、7驱动伺服电机、8动力减速器、9转向体、10转动伺服电机、11方向传动轴、12上机体底板、13旋转吊架座、14平衡重物箱、15卷筒、16外围结构、18大臂液压杆、17绳索、19大臂、20小臂、21小臂液压杆、22定滑轮、23水平吊杆、24吊绳、25外壳、26丝杆模组、27光轴、28丝杆、29电机、30减速器、31直线导轨、32控制器、33环境摄像头、34载物平台、35中间足推动杆气缸、36中间足活塞杆、37十字爪盘、38中间足连接件、39中间足吸盘、40边沿足推动杆气缸、41边沿足活塞杆、42边沿足连接件、43边沿足吸盘、44底板陀螺仪、45底板涡轮盘、46右侧电机、47喷涂平台底板、48右侧涡轮盘、49左侧涡轮盘、50左侧电机、51一节臂传动杆、52连接件、53二节臂传动杆、54连接轴、55一节臂、56二节臂、57喷枪摄像头、58喷枪、59支撑轴、60固定板、61激光测距仪、62风速传感器、63吊环螺钉、64辅助梁、65导轨滑块、66连接块、67限位块、68外支架、69内支架、70支撑座。
具体实施方式
参见图1,本实施例中高层建筑防风型智能墙面喷涂机器人是由上机体1和下机体2组成,上机体1工作在建筑物4的楼顶5上,下机体2吸附工作在墙面3上。
图2、图3和图10示出,上机体1是利用设置在上机体底板12的底部的左右两对万向轮组在楼顶5上移动,使下机体2能够在楼顶5上实现移动;在上机体1上设有卷扬机构,是由卷扬电机通过传动结构驱动卷筒15,卷筒15固定在上机体底板12上,绳索17的一端缠绕在卷筒15上,另一端经安装在上机体机械臂上的定滑轮22转向与下机体2上的吊环螺钉63相连,由索绳17提吊下机体2的竖向移动;为了调节下机体2与墙面3之间的距离,上机体机械臂是由大臂19和小臂20铰接构成的悬伸的机械臂,可伸缩的大臂液压杆18支撑在大臂前端,可伸缩的小臂液压杆21支撑在大臂与小臂之间,用于控制机械臂的悬伸长度。
图4和图5示出,下机体2是以外壳25为载体设置行走机构和吸附机构,行走机构上装载喷涂机构;行走机构由外围结构16和丝杆模组26构成;外围结构16为一矩形框架,矩形框架的各边框设置为由直线导轨31和辅助梁64构成的导向结构,在直线导轨31上适配导轨滑块65;矩形框架中一对呈X向的边框构成X向导向结构,一对呈Y向的边框构成Y向导向结构,相邻两边框之间利用连接块66固定连接;丝杆模组26是在具有“十”卡槽的限位块67上呈“十”字安装横向丝杆和竖向丝杆,在限位块67的内外两侧各设置内支架69和外支架68构成载物平台34,喷涂机构装载在载物平台34上,横向丝杆和竖向丝杆的两端一一对应地利用支撑座70固定在矩形框架中相应边框中的导轨滑块65上;设置电机29和减速器30用于通过丝杆模组26控制载物平台34在矩形框架中的移动,为了增强丝杆模组26的强度,针对丝杆模组26中的丝杆28设置两侧对称的用于支撑的光轴27;在内支架69和连接块66上设置用于吸附墙面3的吸附足,分别是图6所示的设置在内支架69上的中间足和图7所示的设置在各连接块66上的边沿足。
图6示出,中间足由中间足推动杆气缸35、中间足活塞杆36、十字爪盘37、中间足连接件38和中间足吸盘39组成,十字爪盘37将四组吸附足连接在一起,中间足推动杆气缸35控制中间足活塞杆36的伸缩,设置真空泵控制中间足吸盘39产生负压或解除负压,以此控制中间足吸盘39与墙面3吸合或松开,在吸附足内侧设置用于检测吸附压力负压传感器。
图7示出,边沿足由边沿足推动杆气缸40、边沿足活塞杆41、边沿足连接件42和边沿足吸盘43组成,边沿足推动杆气缸40控制边沿足活塞杆41的伸缩,设置真空泵控制边沿足吸盘43产生负压或解除负压,以此来控制边沿足吸盘43与墙面3吸合或松开,在吸附足内侧设置用于检测吸附压力负压传感器。
图8和图9示出,喷涂机构是在固定板60上设置由一节臂55和二节臂56串联构成的悬伸的喷涂机械臂,将一节臂55和二节臂56设置为铰接用于控制喷枪58的喷涂角度;在载物平台34上固定安装喷涂平台底板47,固定板60通过支撑轴59与喷涂平台底板47相连,设置由电机驱动的底板涡轮盘45,用于带动固定板60转动,以此来调整喷涂机构的位置,扩大喷枪58的喷涂面积。
具体实施中,相应的技术措施也包括:
如图2和图3所示,在上机体上卷扬机构中,为保证下机体2的水平平衡,在小臂19的前端呈“T”形连接水平吊杆23,水平吊杆23的两端分别设置有定滑轮22,卷筒15以及绳索17分设为左右两侧,左右两侧的绳索17各自经水平吊杆23上相应一端的定滑轮22转向再利用吊绳24实现对下机体2在两侧对称悬吊;在上机体1上设置呈“U”形环绕机械臂的平衡重物箱14,平衡重物箱14固定设置在旋转吊架座13上,旋转吊架座13是以上机体底板12为支撑;利用平衡重物箱14中内容物的重量保持上机体1与下机体2的重力平衡;在上机体1的底部左右两对万向轮组中,每对万向轮组是由前后各一只万向轮6构成,每对万向轮组中的两只万向轮6之间由方向传动轴11相连接;设置带有动力减速器8的驱动伺服电机7用于驱动万向轮6带动上机体移动,设置转动伺服电机10和由传动伺服电机10驱动的转向体9,用于驱动万向轮6转动带动上机体调整方向,以此保证上机体1的行走和转向,实现对下机体2的横向移动控制。
如图8和图9所示,构成喷涂机械臂的一节臂55和二节臂56均为并联的双臂;在喷涂机构的固定板60的左右两侧各设置一组由伺服电机和涡轮盘构成的动力装置,其中右侧动力装置控制右侧一节臂的转动,左侧动力装置通过一节臂传动杆51控制二节臂的转动,在喷涂机械臂中还设置有连接件52以及二节臂传动杆53构成机械联动结构,二节臂传动杆53的前端与设置在喷枪底板上的连接轴54呈“T”形连接;当右侧电机46带动右侧涡轮盘48顺时针旋转时,控制喷枪58角度向下调节;反之,当右侧涡轮盘48逆时针旋转时,控制喷枪58角度向上调节;当左侧电机50带动左侧涡轮盘49顺时针旋转时,控制二节臂顺时针转动;反之当左侧涡轮盘49逆时针旋转时,控制二节臂56逆时针转动,从而间接调节喷枪58的位置与角度。
设置各种传感器用于进行信号检测并实现自动控制,包括:
图4所示在下机体2上设置激光测距仪61、风速传感器62和环境摄像头33;图9所示在喷枪底板上朝向喷枪方向设置喷枪摄像头57;图8所示在喷涂机构的固定板60上设置底板陀螺仪44。
利用激光测距仪61实时监测下机体2与墙面3之间的距离,并通过上机体机械臂进行调节以保证作业安全性;
利用风速传感器62检测作业时的风速;
利用环境摄像头33便于工作人员观察机器人的工作环境;
利用喷枪摄像头57实时监控喷枪的喷涂质量,及时调节涂料的供给密度,并对遗漏处进行返工;
利用底板陀螺仪44监测下机体的方位、水平、位置、移动速度等信号,以便控制下机体的实时平稳;
具体实施中,设置下机体2中各吸附足的控制方式为:
方式一:各边沿足吸附,中间足松脱,使上机体1中矩形框架与墙面3固定,载物平台34呈可移动;由电机驱动丝杆模组26,实现载物平台34在矩形框架内沿横向丝杆或竖向丝杆进行移位。
方式二:各吸附足均松脱,使下机体1整体与墙面3脱离,利用上机体1中的卷扬机构对下机体2进行整体提吊,实现下机体2整体竖向移动;这种方式适宜于风速较小,利用控制器调节卷扬设备的转速,从而控制下机体2的升降速度。
方式三:各吸附足均松脱,使下机体1整体与墙面3脱离,由上机体1中的行走机构带动,实现下机体2的横向移动。
方式四:第一步各边沿足吸附、中间足松脱,使下机体2中矩形边框与墙面3固定,中间足与墙面3脱离,利用电机正转驱动丝杆模组26中竖向丝杆正向旋转,使载物平台34沿竖向丝杆上移至顶端;第二步各边沿足松脱、中间足吸附,使下机体2中矩形边框与墙面3脱离,载物平台34通过中间足与墙面3固定,利用电机反转驱动丝杆模组26中竖向丝杆反向旋转,使矩形边框沿竖向丝杆上移直至载物平台34重新回位在竖向丝杆的底端,实现上机体整体向上一个步伐的移动;与方式四相应的方式能够实现上机体整体向下一个步伐的移动,以及向左或向右的一个步伐的移动。当风速超过设定的工作范围时,采用方式四控制上机体的移动具有很好的抗风能力。
如图10所示,当下机体2完成一个竖面的喷涂后,松开下机体2中所有吸附足,通过上机体1中两对万向轮6的移动,能够方便地将下机体2移动至下一喷涂竖面,在此过程中,相适应地调整上机体1的机械臂的开合角度,避免下机体2与墙面3发生碰撞。
当边沿足处于吸附状态便可开始喷涂作业,通过载物平台34的移动可以扩大喷涂面积,通过喷涂机械臂的调节能够消除喷涂死角,通过底板涡轮盘45的转动,可实现同时喷涂两个竖面。
利用控制器32进行控制,使下机体2在墙面3上进行纵向重复喷涂作业,喷枪按照从左往右,从上往下的方式进行重复喷涂作业;当遇到窗台、建筑装饰物等墙面突起时,上机体中机械臂调节开合角度,以适应下机体与突起之间的距离,防止碰撞;当整面墙面3喷涂完毕后,通过上机体中的旋转吊架座13将下机体2旋转移动至下一墙面继续喷涂工作。
Claims (6)
1.一种高层建筑防风型智能墙面喷涂机器人,其特征是:
所述机器人由上机体(1)和下机体(2)组成,上机体(1)工作在建筑物(4)的楼顶(5)上,下机体(2)吸附工作在墙面(3)上;
所述上机体(1)是利用设置在上机体底板(12)的底部的左右两对万向轮组在楼顶(5)上移动,使下机体(2)能够在楼顶(5)上实现移动;
在所述上机体(1)上设有卷扬机构,是由卷扬电机通过传动结构驱动卷筒(15),绳索(17)的一端缠绕在卷筒(15)上,另一端经安装在上机体机械臂上的定滑轮(22)转向与下机体(2)上的吊环螺钉(63)相连,由绳索(17)提吊下机体(2)的竖向移动;所述上机体机械臂是由大臂(19)和小臂(20)铰接构成的悬伸的机械臂,可伸缩的大臂液压杆(18)支撑在大臂前端,可伸缩的小臂液压杆(21)支撑在大臂与小臂之间,用于控制机械臂的悬伸长度;
所述下机体(2)是以外壳(25)为载体设置行走机构和吸附机构,行走机构上装载喷涂机构;
所述行走机构由外围结构(16)和丝杆模组(26)构成;
所述外围结构(16)为一矩形框架,矩形框架的各边框设置为由直线导轨(31)和辅助梁(64)构成的导向结构,在直线导轨(31)上适配导轨滑块(65);所述矩形框架中一对呈X向的边框构成X向导向结构,一对呈Y向的边框构成Y向导向结构,相邻两边框之间利用连接块(66)固定连接;
所述丝杆模组(26)是在具有“十”卡槽的限位块(67)上呈“十”字安装横向丝杆和竖向丝杆,在所述限位块(67)的内外两侧各设置内支架(69)和外支架(68)构成载物平台(34),所述喷涂机构装载在所述载物平台(34)上,所述横向丝杆和竖向丝杆的两端一一对应地固定在矩形框架中相应边框中的导轨滑块(65)上;设置电机和减速器用于通过丝杆模组(26)控制载物平台(34)在矩形框架中的移动;
在所述内支架(69)和连接块(66)上设置用于吸附墙面(3)的吸附足,分别是设置在内支架(69)上的中间足和设置在各连接块(66)上的边沿足;
所述喷涂机构是在固定板(60)上设置由一节臂(55)和二节臂(56)串联构成的悬伸的喷涂机械臂,将所述一节臂(55)和二节臂(56)设置为铰接用于控制喷枪(58)的喷涂角度;在载物平台(34)上固定安装喷涂平台底板(47),所述固定板(60)通过支撑轴(59)与喷涂平台底板(47)相连。
2.根据权利要求1所述高层建筑防风型智能墙面喷涂机器人,其特征是:在所述上机体上卷扬机构中,在小臂(19)的前端呈“T”形连接水平吊杆(23),水平吊杆(23)的两端分别设置有定滑轮(22),所述卷筒(15)以及绳索(17)分设为左右两侧,左右两侧的绳索(17)各自经水平吊杆(23)上相应一端的定滑轮(22)转向实现对下机体(2)在两侧对称悬吊。
3.根据权利要求1所述高层建筑防风型智能墙面喷涂机器人,其特征是:在所述上机体(1)上设置呈“U”形环绕机械臂的平衡重物箱(14),所述平衡重物箱(14)固定设置在旋转吊架座(13)上,所述旋转吊架座(13)是以上机体底板(12)为支撑;利用平衡重物箱(14)中内容物的重量保持上机体(1)与下机体(2)的重力平衡。
4.根据权利要求1所述高层建筑防风型智能墙面喷涂机器人,其特征是:在所述上机体(1)的底部左右两对万向轮组中,每对万向轮组是由前后各一只万向轮(6)构成,每对万向轮组中的两只万向轮(6)之间由方向传动轴(11)相连接;设置驱动伺服电机(7)用于驱动万向轮(6)带动上机体移动,设置转动伺服电机(10)用于驱动万向轮(6)带动上机体调整方向。
5.根据权利要求1所述高层建筑防风型智能墙面喷涂机器人,其特征是:构成所述喷涂机械臂的一节臂(55)和二节臂(56)均为并联的双臂;在所述喷涂机构的固定板(60)的左右两侧各设置一组由伺服电机和涡轮盘构成的动力装置,其中右侧动力装置控制右侧一节臂的转动,左侧动力装置通过一节臂传动杆(51)控制二节臂(56)的转动,在所述喷涂机械臂中还设置有连接件(52)以及二节臂传动杆(53)构成机械联动结构。
6.根据权利要求1所述高层建筑防风型智能墙面喷涂机器人,其特征是:
设置下机体(2)中各吸附足的控制方式为:
方式一:各边沿足吸附,中间足松脱,使上机体(1)中矩形框架与墙面(3)固定,载物平台(34)呈可移动;由电机驱动丝杆模组(26),实现载物平台(34)在矩形框架内沿横向丝杆或竖向丝杆进行移位;
方式二:各吸附足均松脱,使下机体(1)整体与墙面(3)脱离,利用上机体(1)中的卷扬机构对下机体(2)进行整体提吊,实现下机体(2)整体竖向移动;
方式三:各吸附足均松脱,使下机体(1)整体与墙面(3)脱离,由上机体(1)中的行走机构带动,实现下机体(2)的横向移动;
方式四:第一步各边沿足吸附、中间足松脱,使下机体(2)中矩形边框与墙面(3)固定,中间足与墙面(3)脱离,利用电机正转驱动丝杆模组(26)中竖向丝杆正向旋转,使载物平台(34)沿竖向丝杆上移至顶端;第二步各边沿足松脱、中间足吸附,使下机体(2)中矩形边框与墙面(3)脱离,载物平台(34)通过中间足与墙面(3)固定,利用电机反转驱动丝杆模组(26)中竖向丝杆反向旋转,使矩形边框沿竖向丝杆上移直至载物平台(34)重新回位在竖向丝杆的底端,实现上机体整体向上一个步伐的移动;与方式四相应的方式能够实现上机体整体向下一个步伐的移动,以及向左或向右的一个步伐的移动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110917745.4A CN113445708A (zh) | 2021-08-11 | 2021-08-11 | 高层建筑防风型智能墙面喷涂机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110917745.4A CN113445708A (zh) | 2021-08-11 | 2021-08-11 | 高层建筑防风型智能墙面喷涂机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113445708A true CN113445708A (zh) | 2021-09-28 |
Family
ID=77818434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110917745.4A Pending CN113445708A (zh) | 2021-08-11 | 2021-08-11 | 高层建筑防风型智能墙面喷涂机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113445708A (zh) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001149273A (ja) * | 1999-11-26 | 2001-06-05 | Maeda Corp | 建造物の外壁清掃装置 |
| CN105178580A (zh) * | 2015-09-22 | 2015-12-23 | 黄灿灿 | 机械臂式的全自动粉刷机 |
| CN105643587A (zh) * | 2016-03-04 | 2016-06-08 | 哈尔滨工业大学 | 十三自由度大型船体外表面喷涂机器人 |
| CN107536566A (zh) * | 2017-09-04 | 2018-01-05 | 常州工学院 | 基于单片机控制的幕墙清洗机器人控制系统及控制方法 |
| CN108729683A (zh) * | 2018-05-31 | 2018-11-02 | 陕西科技大学 | 一种蜘蛛形玻璃清洁机器人 |
| CN109124455A (zh) * | 2018-10-30 | 2019-01-04 | 吉林大学 | 具有自识别和避障能力的楼宇外擦玻璃机器人及其控制方法 |
| CN209579528U (zh) * | 2018-12-13 | 2019-11-05 | 中铁建工集团有限公司 | 一种幕墙玻璃安装机械车 |
| CN111287417A (zh) * | 2020-04-07 | 2020-06-16 | 合肥工业大学 | 高层楼宇外壁智能喷涂机器人及其控制方法 |
| CN111820828A (zh) * | 2020-07-15 | 2020-10-27 | 袁海波 | 一种建筑幕墙自动清洁机器人 |
| CN112120615A (zh) * | 2020-08-11 | 2020-12-25 | 杭州龙皓工程咨询有限公司 | 玻璃幕墙清洁设备 |
-
2021
- 2021-08-11 CN CN202110917745.4A patent/CN113445708A/zh active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001149273A (ja) * | 1999-11-26 | 2001-06-05 | Maeda Corp | 建造物の外壁清掃装置 |
| CN105178580A (zh) * | 2015-09-22 | 2015-12-23 | 黄灿灿 | 机械臂式的全自动粉刷机 |
| CN105643587A (zh) * | 2016-03-04 | 2016-06-08 | 哈尔滨工业大学 | 十三自由度大型船体外表面喷涂机器人 |
| CN107536566A (zh) * | 2017-09-04 | 2018-01-05 | 常州工学院 | 基于单片机控制的幕墙清洗机器人控制系统及控制方法 |
| CN108729683A (zh) * | 2018-05-31 | 2018-11-02 | 陕西科技大学 | 一种蜘蛛形玻璃清洁机器人 |
| CN109124455A (zh) * | 2018-10-30 | 2019-01-04 | 吉林大学 | 具有自识别和避障能力的楼宇外擦玻璃机器人及其控制方法 |
| CN209579528U (zh) * | 2018-12-13 | 2019-11-05 | 中铁建工集团有限公司 | 一种幕墙玻璃安装机械车 |
| CN111287417A (zh) * | 2020-04-07 | 2020-06-16 | 合肥工业大学 | 高层楼宇外壁智能喷涂机器人及其控制方法 |
| CN111820828A (zh) * | 2020-07-15 | 2020-10-27 | 袁海波 | 一种建筑幕墙自动清洁机器人 |
| CN112120615A (zh) * | 2020-08-11 | 2020-12-25 | 杭州龙皓工程咨询有限公司 | 玻璃幕墙清洁设备 |
Non-Patent Citations (1)
| Title |
|---|
| 王巍等: "一种轻型玻璃幕墙清洗机器人模型的研究", 《液压与气动》 * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102341480B1 (ko) | 건물의 외벽을 스프레이 페인팅하는 시스템 및 방법 | |
| CN111287417A (zh) | 高层楼宇外壁智能喷涂机器人及其控制方法 | |
| KR102352730B1 (ko) | 건물의 외벽을 크리닝하는 시스템 및 방법 | |
| CN107200077B (zh) | 一种三体式爬壁机器人及其越障方法 | |
| CN202542734U (zh) | 一种玻璃吊运安装装置 | |
| CN211817748U (zh) | 高层楼宇外壁智能喷涂机器人 | |
| KR20120094480A (ko) | 접착면에서 이동하는 수직이동 로봇 | |
| CN109881872A (zh) | 喷枪组件及喷涂机器人 | |
| CN109958263A (zh) | 喷涂机器人 | |
| CN112282306A (zh) | 一种具有六自由度的外墙自动化喷涂设备 | |
| CN1951641A (zh) | 洞库油罐除锈及喷漆两用机器人 | |
| CN204474187U (zh) | 一种壁式旋臂起重机 | |
| CN113006348B (zh) | 一种高空幕墙自动安装型智能机器人 | |
| CN113601485B (zh) | 一种高层建筑外墙智能喷涂机器人 | |
| CN208822653U (zh) | 一种玻璃幕墙清洗机器人 | |
| CN212836778U (zh) | 一种高空幕墙辅助安装用机械手 | |
| CN113775162A (zh) | 一种外立面施工机器人 | |
| JP2000169083A (ja) | 壁面作業ロボット | |
| CN107717977B (zh) | 高空作业机器人的移动架构系统 | |
| CN113445708A (zh) | 高层建筑防风型智能墙面喷涂机器人 | |
| CN214402607U (zh) | 自动爬行喷涂机器 | |
| KR20170043379A (ko) | 건물외벽 작업툴 및 이를 포함하는 곤돌라 유닛 | |
| CN206707220U (zh) | 一种悬吊式高层建筑外墙多自由度粉刷机 | |
| CN112873180A (zh) | 高空作业悬挂装置及机器人 | |
| CN210433421U (zh) | 一种外墙清洁机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20210928 |
|
| RJ01 | Rejection of invention patent application after publication |