CN113431995A - 一种嵌入式半潜式移动机器人用两自由度云台 - Google Patents
一种嵌入式半潜式移动机器人用两自由度云台 Download PDFInfo
- Publication number
- CN113431995A CN113431995A CN202110606920.8A CN202110606920A CN113431995A CN 113431995 A CN113431995 A CN 113431995A CN 202110606920 A CN202110606920 A CN 202110606920A CN 113431995 A CN113431995 A CN 113431995A
- Authority
- CN
- China
- Prior art keywords
- hollow shaft
- pan
- tilt
- pitching
- mobile robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007789 sealing Methods 0.000 claims abstract description 34
- 238000005096 rolling process Methods 0.000 claims abstract description 10
- 230000005540 biological transmission Effects 0.000 claims description 14
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 abstract description 5
- 238000013461 design Methods 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 4
- 230000004313 glare Effects 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 2
- 230000008093 supporting effect Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/12—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting in more than one direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/18—Heads with mechanism for moving the apparatus relatively to the stand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
- F16M13/02—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles for supporting on, or attaching to, an object, e.g. tree, gate, window-frame, cycle
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Accessories Of Cameras (AREA)
Abstract
本发明公开一种嵌入式半潜式移动机器人用两自由度云台,包括云台壳体、云台底座、云台密封盖、摄像头壳体、俯仰组件、旋转组件、移动机器人本体,摄像头壳体通过俯仰中空轴连接在云台壳体上,云台壳体固定设置在云台底座上,云台底座固定设置在云台密封盖上,云台密封盖固定设置在移动机器人本体上,云台底座上设置有旋转中空轴,云台密封盖内设置滚动轴承及其他密封件,俯仰中空轴轴线和旋转中空轴轴线垂直设置,云台两自由度分别位于云台壳体内部及移动机器人本体内部,本发明两自由度云台结构简单、旋转角度大、密封性好、高度低、与移动机器人的适配性好、涉水时能及时排出水分,非常适合移动机器人进行图像采集。
Description
技术领域
本发明涉及云台设备技术领域,具体涉及一种嵌入式半潜式移动机器人用两自由度云台。
背景技术
随着社会的不断进步,视频监控技术的不断发展,越来越多的移动机器人上也配备了视频监控系统。云台是安装、固定摄像机的支撑设备,可以对摄像头进行角度调整,也可以用于各种检测仪器以及发射装置的固定安装。可以分为单自由度云台与多自由度云台,其中多自由度云台中的两自由度云台因其控制方式简单,应用最为广泛。
目前市面上的大多数云台为电机驱动,结构较为复杂、旋转角度小、高度较高而且很少对其密封性进行介绍,云台涉水后排水性能也多未提及,对移动机器人的适配性不是很好,由于使用电机进行驱动其成本也有所上升。
鉴于上述缺陷,本发明创作者经过长时间的研究和实践终于获得了本发明。
发明内容
1、为解决上述技术缺陷,本发明采用的技术方案在于,提供一种嵌入式半潜式移动机器人用两自由度云台,其特征在于,包括云台壳体、云台底座、摄像头壳体、俯仰组件、旋转组件、移动机器人本体,所述摄像头壳体通过俯仰中空轴连接在所述云台壳体上,所述摄像头壳体内部线路通过所述俯仰中空轴,所述俯仰组件带动所述摄像头壳体绕所述俯仰中空轴轴线转动,所述云台壳体固定设置在所述云台底座上,所述云台底座上设置有旋转中空轴,所述旋转组件带动所述云台壳体绕所述旋转中空轴轴线转动,所述云台壳体及所述云台壳体的电路线路通过所述旋转中空轴与所述移动机器人本体的控制器相连,经由所述俯仰中空轴的所述摄像头壳体的电路线路通过所述旋转中空轴与所述移动机器人本体的控制器相连,所述俯仰中空轴轴线和所述旋转中空轴轴线垂直设置,所述旋转中空轴设置在所述移动机器人本体内。
较佳的,所述俯仰组件包括俯仰中空轴舵机、俯仰中空轴舵机固定板、第一带轮组,所述俯仰中空轴舵机设置在所述俯仰中空轴舵机固定板上,所述俯仰中空轴舵机通过所述第一带轮组和所述摄像头壳体传动连接。
较佳的,所述旋转组件包括旋转中空轴舵机、旋转中空轴舵机固定板、第二带轮组,所述旋转中空轴舵机设置在所述旋转中空轴舵机固定板上,所述旋转中空轴舵机通过所述第二带轮组和所述旋转中空轴传动连接。
较佳的,所述俯仰中空轴舵机固定板安装于所述云台壳体上,所述旋转中空轴舵机固定板安装于所述移动机器人本体内部,辅助光源以及摄像头安装于所述摄像头壳体内。
较佳的,所述第一带轮组设置为传动连接的两带轮,一所述带轮通过带轮安装轴设置于所述摄像头壳体的一侧,所述带轮安装轴和所述俯仰中空轴同轴设置,另一所述带轮设置在所述俯仰中空轴舵机的输出轴上。
较佳的,所述第二带轮组设置为传动连接的两带轮,一所述带轮设置在所述旋转中空轴上,另一所述带轮设置在所述旋转中空轴舵机的输出轴上。
较佳的,所述俯仰中空轴和所述云台壳体通过法兰轴承连接,所述带轮安装轴和所述云台壳体通过法兰轴承连接。
较佳的,对应所述旋转中空轴设置有云台密封盖,所述云台密封盖设置在所述移动机器人本体上,所述云台密封盖与所述移动机器人本体连接处设有密封件,所述云台密封盖内设置有滚动轴承,所述滚动轴承两侧均带有密封圈,所述旋转中空轴通过所述滚动轴承和所述云台密封盖连接。
较佳的,所述云台密封盖内部设置有O形密封圈与格莱圈,所述O形密封圈与所述格莱圈均套设在所述旋转中空轴上。
较佳的,所述旋转中空轴为阶梯轴,所述云台壳体结构为U形。
与现有技术比较本发明的有益效果在于:本发明所述两自由度云台结构简单、旋转角度大、密封性好、不易发生干涉,云台整体采用嵌入式、半潜式设计,与移动机器人有着很好的适配性,空间利用率高,云台壳体采用底部开口方式,保证了云台在淋雨及涉水时能够通过重力将水分及时排出,舵机与带轮的布置方式有效的降低了云台的整体高度,由于采用舵机进行控制,成本也有所减低,非常适合移动机器人进行图像采集。
附图说明
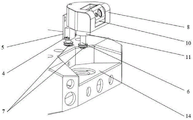
图1为所述两自由度云台的结构立体图;
图2为所述两自由度云台的装配示意图;
图3为所述两自由度云台的分解结构视图;
图4为所述两自由度云台的结构剖视图。
图中数字表示:
1-俯仰中空轴舵机;2-俯仰中空轴舵机固定板;3-俯仰中空轴;4-旋转中空轴舵机;5-旋转中空轴舵机固定板;6-旋转中空轴;7-带轮;8-云台壳体;9-云台底座;10-摄像头壳体;11-云台密封盖;12-法兰轴承;13-滚动轴承;14-移动机器人本体;15-带轮安装轴;16-O形密封圈;17-格莱圈。
具体实施方式
以下结合附图,对本发明上述的和另外的技术特征和优点作更详细的说明。
如图1所示,图1为所述两自由度云台的结构立体图;本发明所述两自由度云台采用嵌入式、半潜式设计;包括云台壳体8、云台底座9、摄像头壳体10、俯仰组件和旋转组件,所述摄像头壳体10通过俯仰中空轴3连接在所述云台壳体8上,所述俯仰组件带动所述摄像头壳体10绕所述俯仰中空轴3轴线转动,所述摄像头壳体10内部线路通过所述俯仰中空轴3,所述云台壳体8固定设置在所述云台底座9上,所述云台底座9上设置有旋转中空轴6,所述旋转组件带动所述云台壳体8绕所述旋转中空轴6轴线转动,经由所述俯仰中空轴3的所述摄像头壳体10内部线路也通过所述旋转中空轴6与移动机器人内部控制器相连,所述俯仰中空轴3轴线和所述旋转中空轴6轴线垂直设置,所述旋转中空轴设置在所述移动机器人本体内部,从而使得云台一自由度位于所述移动机器人本体14内部。
所述俯仰组件包括俯仰中空轴舵机1、俯仰中空轴舵机固定板2、第一带轮组,所述俯仰中空轴舵机1设置在所述俯仰中空轴舵机固定板2上,所述俯仰中空轴舵机1通过所述第一带轮组和所述摄像头壳体10传动连接,舵机及两中空轴的布置方式使得云台的两自由度分别位于所述云台壳体8内部及所述移动机器人本体14内部。
所述旋转组件包括旋转中空轴舵机4、旋转中空轴舵机固定板5、第二带轮组,所述旋转中空轴舵机4设置在所述旋转中空轴舵机固定板5上,所述旋转中空轴舵机4通过所述第二带轮组和所述旋转中空轴6传动连接。
具体的,如图2、图3和图4所示,图2为所述两自由度云台的装配示意图;图3为所述两自由度云台的分解结构视图;图4为所述两自由度云台的结构剖视图。
所述旋转中空轴6为阶梯轴,所述云台壳体8为U形,有效的扩大了云台的旋转角度且与移动机器人本体不会发生干涉,所述俯仰中空轴舵机1安装于所述俯仰中空轴舵机固定板2上,所述旋转中空轴舵机4安装于所述旋转中空轴舵机固定板5上,所述俯仰中空轴舵机固定板2安装于所述云台壳体8内部,所述旋转中空轴舵机固定板5安装于移动机器人本体14内部,辅助光源以及摄像头安装于所述摄像头壳体10内。
所述第一带轮组设置为传动连接的两带轮7,一所述带轮7通过带轮安装轴15设置于所述摄像头壳体10的一侧,所述带轮安装轴15和所述俯仰中空轴3同轴设置,另一所述带轮7设置在所述俯仰中空轴舵机1的输出轴上,从而通过所述俯仰中空轴舵机1带动所述摄像头壳体10转动。
同样的,所述第二带轮组设置为传动连接的两带轮7,一所述带轮7设置在所述旋转中空轴6上,另一所述带轮7设置在所述旋转中空轴舵机4的输出轴上,从而通过所述旋转中空轴舵机4带动所述旋转中空轴6转动。
所述俯仰中空轴3和所述云台壳体8通过法兰轴承12连接,从而便于实现所述俯仰中空轴3的绕轴转动。所述云台底座9固定于所述云台壳体8底部且与所述旋转中空轴6通过螺钉连接。对应所述旋转中空轴6设置有云台密封盖11,所述云台密封盖11设置在所述移动机器人本体14上,从而实现所述云台壳体8在所述移动机器人本体14上的位置设置。
所述云台密封盖11内设置有滚动轴承13,所述旋转中空轴6通过所述滚动轴承13和所述云台密封盖11连接,从而便于实现所述旋转中空轴6的绕轴转动。
所述云台密封盖11内部设置有O形密封圈16与格莱圈17,保证了云台整体与移动机器人连接的密封性。
较佳的,所述旋转中空轴舵机4通过同步带以所述旋转中空轴6为旋转中心驱动所述云台壳体8左右转动,从而调整云台的航向角;所述俯仰中空轴舵机1通过同步带以所述俯仰中空轴3为旋转中心驱动所述云台壳体8上下翻转,从而调整云台的俯仰角。
本发明的两自由度云台通过带传动的方式,在所述俯仰中空轴舵机1以及所述旋转中空轴舵机4的驱动下达到预定的工作要求,所述俯仰中空轴舵机1以及所述旋转中空轴舵机4输出端均安装有所述带轮7,分别与所述俯仰中空轴3和所述旋转中空轴4组成两对带传动.
所述云台壳体8采用扁平化设计底部开口方式,既保证了云台在淋雨及涉水时能够通过重力将水分及时排出也降低了云台的高度。
所述云台底座9与所述云台壳体8通过螺钉连接的同时且与所述旋转中空轴6通过螺钉连接,既保证了云台整体的完整性也保证了云台的密封性,
所述格莱圈16、所述O形圈17安装于所述云台密封盖11内部,所述云台密封盖11通过所述滚动轴承13与所述旋转中空轴6上部相互配合并通过螺钉固定于所述移动机器人本体14上,所述云台密封盖11与所述移动机器人本体14连接处也设有密封,既保证了云台的密封性也保证了移动机器人的密封性。
具体工作过程如下:当所述俯仰中空轴舵机1以及所述旋转中空轴舵机4通电时,可以两个舵机分别进行控制,也可以对两舵机同时进行控制.
当单独控制所述旋转中空轴舵机4时,由于所述旋转中空轴6与安装于所述旋转中空轴固定板5上的所述旋转中空轴舵机4通过同步带相互连接,当所述旋转中空轴舵机4正反转时,会带动与所述旋转中空轴6相连接的云台可以左右转动,由于所述云台壳体8为U形,既保证了云台总体结构的美观,也使得云台转动角度有了进一步的扩大。
当单独控制所述俯仰中空轴舵机1时,所述带轮安装轴15与安装于所述俯仰中空轴固定板2上的所述俯仰中空轴舵机1通过同步带相互连接,而所述带轮安装轴15同时又与所述摄像头壳体10通过法兰轴承相互连接,所述摄像头壳体10另外一侧安装有所述俯仰中空轴3,并通过所述法兰轴承12安装于所述云台壳体8上,在所述法兰轴承12以及所述俯仰中空轴3的支撑作用下,从而使得所述摄像头壳体10保持水平位置,同时所述摄像头壳体10的上部与下部都与所述云台壳体8有较大的间隙,当所述带轮安装轴15正反转时,会带动所述摄像头壳体10上下翻转,由于间隙的存在使得云台具有更大的转动角度,两法兰轴承既保证了摄像头壳体与云台壳体连接的可靠性与紧密性也保证了摄像头壳体的密封性。
当同时控制两舵机时,能够使得摄像头上下转动与左右翻转,由于采用嵌入式、半潜式设计,云台与移动机器人壳体具有很好的适配性,既避免了云台与移动机器人本体发生干涉,也有效的扩大了云台的工作空间。
根据本发明的较佳实施例的两自由度云台云台结构简单、旋转角度大、密封性好、不易干涉。云台整体采用嵌入式、半潜式设计,与移动机器人有着很好的适配性,空间利用率高,云台壳体采用底部开口方式,保证了云台在淋雨及涉水时能够通过重力将水分及时排出,舵机与带轮的布置方式有效的降低了云台的整体高度,由于采用舵机进行控制,成本也有所减低,非常适合移动机器人进行图像采集。
以上所述仅为本发明的较佳实施例,对本发明而言仅仅是说明性的,而非限制性的。本专业技术人员理解,在本发明权利要求所限定的精神和范围内可对其进行许多改变,修改,甚至等效,但都将落入本发明的保护范围内。
Claims (10)
1.一种嵌入式半潜式移动机器人用两自由度云台,其特征在于,包括云台壳体、云台底座、摄像头壳体、俯仰组件、旋转组件、移动机器人本体,所述摄像头壳体通过俯仰中空轴连接在所述云台壳体上,所述摄像头壳体内部线路通过所述俯仰中空轴,所述俯仰组件带动所述摄像头壳体绕所述俯仰中空轴轴线转动,所述云台壳体固定设置在所述云台底座上,所述云台底座上设置有旋转中空轴,所述旋转组件带动所述云台壳体绕所述旋转中空轴轴线转动,所述云台壳体的电路线路通过所述旋转中空轴与所述移动机器人本体的控制器相连,经由所述俯仰中空轴的所述摄像头壳体的电路线路通过所述旋转中空轴与所述移动机器人本体的控制器相连,所述俯仰中空轴轴线和所述旋转中空轴轴线垂直设置,所述旋转中空轴设置在所述移动机器人本体内。
2.如权利要求1所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述俯仰组件包括俯仰中空轴舵机、俯仰中空轴舵机固定板、第一带轮组,所述俯仰中空轴舵机设置在所述俯仰中空轴舵机固定板上,所述俯仰中空轴舵机通过所述第一带轮组和所述摄像头壳体传动连接。
3.如权利要求2所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述旋转组件包括旋转中空轴舵机、旋转中空轴舵机固定板、第二带轮组,所述旋转中空轴舵机设置在所述旋转中空轴舵机固定板上,所述旋转中空轴舵机通过所述第二带轮组和所述旋转中空轴传动连接。
4.如权利要求3所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述俯仰中空轴舵机固定板安装于所述云台壳体上,所述旋转中空轴舵机固定板安装于所述移动机器人本体内部,辅助光源以及摄像头安装于所述摄像头壳体内。
5.如权利要求4所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述第一带轮组设置为传动连接的两带轮,一所述带轮通过带轮安装轴设置于所述摄像头壳体的一侧,所述带轮安装轴和所述俯仰中空轴同轴设置,另一所述带轮设置在所述俯仰中空轴舵机的输出轴上。
6.如权利要求4所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述第二带轮组设置为传动连接的两带轮,一所述带轮设置在所述旋转中空轴上,另一所述带轮设置在所述旋转中空轴舵机的输出轴上。
7.如权利要求1所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述俯仰中空轴和所述云台壳体通过法兰轴承连接,所述带轮安装轴和所述云台壳体通过法兰轴承连接。
8.如权利要求1所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,对应所述旋转中空轴设置有云台密封盖,所述云台密封盖设置在所述移动机器人本体上,所述云台密封盖与所述移动机器人本体连接处设有密封件,所述云台密封盖内设置有滚动轴承,所述滚动轴承两侧均带有密封圈,所述旋转中空轴通过所述滚动轴承和所述云台密封盖连接。
9.如权利要求8所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述云台密封盖内部设置有0形密封圈与格莱圈,所述0形密封圈与所述格莱圈均套设在所述旋转中空轴上。
10.如权利要求1所述的嵌入式半潜式移动机器人用两自由度云台,其特征在于,所述旋转中空轴为阶梯轴,所述云台壳体结构为U形。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110606920.8A CN113431995A (zh) | 2021-05-31 | 2021-05-31 | 一种嵌入式半潜式移动机器人用两自由度云台 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110606920.8A CN113431995A (zh) | 2021-05-31 | 2021-05-31 | 一种嵌入式半潜式移动机器人用两自由度云台 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113431995A true CN113431995A (zh) | 2021-09-24 |
Family
ID=77803412
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110606920.8A Pending CN113431995A (zh) | 2021-05-31 | 2021-05-31 | 一种嵌入式半潜式移动机器人用两自由度云台 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113431995A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114776955A (zh) * | 2022-03-25 | 2022-07-22 | 北京天必达科技有限公司 | 一种水下机器人舵机两轴云台 |
| CN116045377A (zh) * | 2023-03-08 | 2023-05-02 | 宁波奥克斯电气股份有限公司 | 一种移动空调及其控制方法、装置和存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10103587A (ja) * | 1996-10-01 | 1998-04-21 | Matsushita Electric Ind Co Ltd | 電動雲台 |
| JP2000077150A (ja) * | 1998-09-01 | 2000-03-14 | Japan Servo Co Ltd | スリップリング組立体を内蔵した直接駆動電動機装置 |
| JP2002040553A (ja) * | 2000-07-21 | 2002-02-06 | Canon Inc | 雲台付カメラ装置 |
| CN200966104Y (zh) * | 2006-10-30 | 2007-10-24 | 天津市嘉杰电子有限公司 | 高速球型摄像机机芯结构 |
| JP2010011199A (ja) * | 2008-06-27 | 2010-01-14 | Canon Inc | 可動雲台付き監視カメラ装置 |
| CN212969902U (zh) * | 2020-10-26 | 2021-04-13 | 新乡北方车辆仪表有限公司 | 一种多光谱稳像跟踪定位伺服云台 |
| CN112797270A (zh) * | 2020-12-31 | 2021-05-14 | 江苏集萃华科智能装备科技有限公司 | 一种两自由度云台的摄像头装置 |
-
2021
- 2021-05-31 CN CN202110606920.8A patent/CN113431995A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10103587A (ja) * | 1996-10-01 | 1998-04-21 | Matsushita Electric Ind Co Ltd | 電動雲台 |
| JP2000077150A (ja) * | 1998-09-01 | 2000-03-14 | Japan Servo Co Ltd | スリップリング組立体を内蔵した直接駆動電動機装置 |
| JP2002040553A (ja) * | 2000-07-21 | 2002-02-06 | Canon Inc | 雲台付カメラ装置 |
| CN200966104Y (zh) * | 2006-10-30 | 2007-10-24 | 天津市嘉杰电子有限公司 | 高速球型摄像机机芯结构 |
| JP2010011199A (ja) * | 2008-06-27 | 2010-01-14 | Canon Inc | 可動雲台付き監視カメラ装置 |
| CN212969902U (zh) * | 2020-10-26 | 2021-04-13 | 新乡北方车辆仪表有限公司 | 一种多光谱稳像跟踪定位伺服云台 |
| CN112797270A (zh) * | 2020-12-31 | 2021-05-14 | 江苏集萃华科智能装备科技有限公司 | 一种两自由度云台的摄像头装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114776955A (zh) * | 2022-03-25 | 2022-07-22 | 北京天必达科技有限公司 | 一种水下机器人舵机两轴云台 |
| CN116045377A (zh) * | 2023-03-08 | 2023-05-02 | 宁波奥克斯电气股份有限公司 | 一种移动空调及其控制方法、装置和存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113431995A (zh) | 一种嵌入式半潜式移动机器人用两自由度云台 | |
| EP3531682B1 (en) | Combined camera | |
| CA2438644A1 (en) | Rugged miniature pan/tilt dome camera assembly | |
| CN110881120B (zh) | 一种钢管塔用环形摄像装置 | |
| CN214751536U (zh) | 一种轨道式智能巡检机器人的云台 | |
| CN114756062A (zh) | 一种轨道式智能巡检机器人的云台 | |
| CN208675375U (zh) | 一种可驱动旋转摄像头 | |
| CN206117818U (zh) | 旋转枪形摄像头 | |
| CN109027592B (zh) | 用于激光驱鸟设备的全天候全方位旋转转台及实现方法 | |
| CN114132470A (zh) | 水下机器人的控制垂直矢量推进装置及其推进方法 | |
| CN207945441U (zh) | 一种云台 | |
| CN205945964U (zh) | 旋转球形摄像头 | |
| CN214683091U (zh) | 一种具有防雾防尘结构的实景三维一体机 | |
| CN211538918U (zh) | 一种除尘器用智能旋转管道 | |
| CN214751275U (zh) | 一种球形红外摄像头的竖直角度调整装置 | |
| CN213342423U (zh) | 一种用于视频会议的网络摄像头 | |
| CN106246918A (zh) | 云台摄像机上的轴承密封结构 | |
| CN211613767U (zh) | 一种便于调整的集气罩 | |
| CN208982931U (zh) | 一种新型电驱摄像头 | |
| CN210344843U (zh) | 一种回转云台机构及具有回转云台机构的巡检机器人 | |
| CN209511495U (zh) | 一种用于激光驱鸟设备的全天候全方位旋转转台 | |
| CN213485033U (zh) | 一种移动目标追踪装置 | |
| CN209839557U (zh) | 防爆一体化云台摄像仪皮带传动机构 | |
| CN215929053U (zh) | 一种水下云台 | |
| CN116424040B (zh) | 水轮两栖勘探机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20210924 |
|
| RJ01 | Rejection of invention patent application after publication |