CN112839602A - 用于影响心脏收缩性和/或松弛性的系统和方法 - Google Patents
用于影响心脏收缩性和/或松弛性的系统和方法 Download PDFInfo
- Publication number
- CN112839602A CN112839602A CN201980067356.8A CN201980067356A CN112839602A CN 112839602 A CN112839602 A CN 112839602A CN 201980067356 A CN201980067356 A CN 201980067356A CN 112839602 A CN112839602 A CN 112839602A
- Authority
- CN
- China
- Prior art keywords
- distal
- electrode
- proximal
- electrodes
- expandable member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













































































































































































































































































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
- A61N1/0558—Anchoring or fixation means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
- A61M25/1011—Multiple balloon catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0551—Spinal or peripheral nerve electrodes
- A61N1/0553—Paddle shaped electrodes, e.g. for laminotomy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/3605—Implantable neurostimulators for stimulating central or peripheral nerve system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00106—Sensing or detecting at the treatment site ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/0016—Energy applicators arranged in a two- or three dimensional array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/0022—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00214—Expandable means emitting energy, e.g. by elements carried thereon
- A61B2018/00267—Expandable means emitting energy, e.g. by elements carried thereon having a basket shaped structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00273—Anchoring means for temporary attachment of a device to tissue
- A61B2018/00279—Anchoring means for temporary attachment of a device to tissue deployable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00053—Mechanical features of the instrument of device
- A61B2018/00273—Anchoring means for temporary attachment of a device to tissue
- A61B2018/00279—Anchoring means for temporary attachment of a device to tissue deployable
- A61B2018/00285—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00434—Neural system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00839—Bioelectrical parameters, e.g. ECG, EEG
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B2018/1467—Probes or electrodes therefor using more than two electrodes on a single probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6858—Catheters with a distal basket, e.g. expandable basket
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/365—Heart stimulators controlled by a physiological parameter, e.g. heart potential
- A61N1/36514—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure
- A61N1/36542—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure controlled by body motion, e.g. acceleration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/365—Heart stimulators controlled by a physiological parameter, e.g. heart potential
- A61N1/36514—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure
- A61N1/3655—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure controlled by body or blood temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/365—Heart stimulators controlled by a physiological parameter, e.g. heart potential
- A61N1/36514—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure
- A61N1/36557—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure controlled by chemical substances in blood
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/365—Heart stimulators controlled by a physiological parameter, e.g. heart potential
- A61N1/36514—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure
- A61N1/36564—Heart stimulators controlled by a physiological parameter, e.g. heart potential controlled by a physiological quantity other than heart potential, e.g. blood pressure controlled by blood pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/362—Heart stimulators
- A61N1/365—Heart stimulators controlled by a physiological parameter, e.g. heart potential
- A61N1/368—Heart stimulators controlled by a physiological parameter, e.g. heart potential comprising more than one electrode co-operating with different heart regions
Abstract
一种用于施加神经刺激的系统,包括:外部护套;细长内部构件,该内部构件在外部护套中并且能够相对于外部护套移动。内腔具有远端。可扩张构件耦接到内部构件的远端并且位于外部护套中。可扩张构件从在外部护套中的压缩状态自扩张到在外部护套之外的扩张状态。可扩张构件包括:远端部分,该远端部分包括多根编织在一起的丝线;以及近端部分,该近端部分包括平行于纵向轴线延伸的多根丝线。该系统包括多个电极组件,该多个电极组件在可扩张构件的外部并且围绕可扩张构件在周向上间隔开。每个电极组件耦接到平行于纵向轴线延伸的两根丝线。每个电极组件包括多个在纵向上间隔开的电极。
Description
通过引用而并入
本申请要求于2018年8月13日提交的美国临时专利申请No.62/718,147、2019年4月30日提交的美国临时专利申请No.62/840,608和2019年6月27日提交的美国临时专利申请No.62/867,438的优先权,这些申请中的每一个均通过引用整体并入本文。出于所有目的,包括但不限于根据37 C.F.R.37C.F.R.§1.57通过引用而并入,如与本申请一起提交的在申请数据表中被确认为外国或本国优先权的任何和所有申请将其全部内容通过引用并入本文。
技术领域
本公开总体涉及用于促进调节(例如,电神经调节)的方法和系统,并且更特别地,涉及用于促进心脏中和周围的一个或多个神经的治疗和校准电神经调节的方法和系统。
背景技术
急性心力衰竭是一种心脏症状,其中心脏的结构或功能的问题损害其提供足够的血流来满足身体需要的能力。这种症状降低生活质量,并且是西方世界中住院治疗和死亡率的主要原因。治疗急性心力衰竭典型地针对于去除诱因、防止心脏功能的退化以及控制患者的充血状态。
发明内容
治疗急性心力衰竭包括使用诸如多巴胺和多巴酚丁胺的变力性药剂。然而,这些药剂具有变时性和变力性作用并且在特征上来说增加了心脏收缩性,代价在于继发于心率的提高而显著地增加了耗氧量。结果,虽然这些变力性药剂增加了心肌收缩性并提高了血液动力,但是临床试验已经一致地证明心律失常和心肌消耗的增加导致过高死亡率。
这样,需要选择性且局部地治疗急性心力衰竭,并且以其他方式获得血液动力学控制,而不会引起不想要的系统效应。因此,在一些示例中,没有使用变力性药剂。在其他示例中,可以使用降低剂量的变力性药剂,因为例如通过本文的各个示例提供了例如协同效应。通过减小剂量,也可以显著地降低副作用。
本公开的若干示例提供了对心脏和其他失调的组织调节(例如,神经调节)的方法。例如,一些示例提供了用于对在患者的心脏中或周围的一个或多个神经进行神经调节的方法和装置。本公开的若干方法例如可以有用于对具有心脏疾病的患者(例如,具有急性或者慢性心脏病的患者)电神经调节。本公开的若干方法包括例如对心脏的自主神经系统的一个或多个目标部位的神经调节。在一些示例中,感测的非电心脏活动特性用于对传送到患者的电神经调节的一个或多个特性进行调整。可以根据本公开治疗的医学症状的非限制性例子包括心血管医学症状。
如本文所讨论,本公开的导管和电极系统的配置可以有利地允许将导管的一部分定位在患者的脉管系统内,在主肺动脉和/或肺动脉(右肺动脉和左肺动脉)的一个或两个中。一旦被定位,本公开的导管和电极系统就可提供电刺激能量(例如,电流或电脉冲)以刺激主肺动脉和/或肺动脉的一个或两个周围的自主神经纤维,以便给患者提供辅助心脏治疗。
导管可包括具有第一端和第二端的细长主体。细长主体可以包括延伸通过细长主体的第一端和第二端的细长的径向轴线,以及延伸通过细长的径向轴线的第一平面。至少两个细长的刺激构件可以从细长主体延伸,其中至少两个细长的刺激构件中的每一个弯曲到至少部分地由第一平面限定第一体积中。在一种示例中,至少一个电极在至少两个细长的刺激构件的每一个上,其中至少一个电极在第一体积中形成电极阵列。导电元件可以延伸通过细长的刺激构件中的每一个和/或沿着细长的刺激构件中的每一个延伸,其中导电元件将电流传导到电极阵列中的电极的两个或更多个的组合。
在一种示例中,至少两个细长的刺激构件可仅在至少部分地由第一平面限定第一体积中弯曲,并且至少部分地由第一平面限定并且与第一体积相对的第二体积不包含电极。第二平面可垂直地沿细长主体的细长的径向轴线与第一平面相交以将第一体积分成第一象限体积和第二象限体积。至少两个细长的刺激构件可包括第一细长的刺激构件和第二细长的刺激构件,其中第一细长的刺激构件弯曲到第一象限体积中并且第二细长的刺激构件弯曲到第二象限体积中。
至少两个细长的刺激构件中的每一个可包括刺激构件细长主体和纵向地延伸通过细长主体和刺激构件细长主体的丝线,其中由丝线抵靠刺激构件细长主体施加在其远端或远端附近的压力使得丝线偏转,从而将弯曲赋予到进入至少部分地由第一平面限定的第一空间中的至少两个细长的刺激构件中的每一个中。导管还可以包括锚固构件,其从细长主体延伸到至少部分地由第一平面限定并与第一体积相对的第二体积中,其中该锚固构件不包含电极。
在附加示例中,导管还可包括在至少两个细长的刺激构件中的至少两个之间延伸的结构。附加电极可定位在所述结构上,附加电极具有从附加电极延伸通过细长的刺激构件中的一个的导电元件,其中导电元件将电流传导到附加电极和在至少两个细长的刺激构件中的每一个上的至少一个电极中的至少一个的组合。这样的结构的示例为网格结构。
导管还可包括定位测量仪器,所述定位测量仪器包括具有第一端和在第一端的远端的缓冲器端的细长的测量仪器主体。导管的细长主体可以包括从第一端延伸通过细长主体的第二端的第一内腔。缓冲器端可以具有一形状,该形状具有不小于垂直于细长的径向轴线截取的细长主体的远端的表面区域的表面区域,并且细长的测量仪器主体可以延伸通过细长主体的第一内腔以将缓冲器端定位成超过细长主体的第二端。在一种示例中,定位测量仪器的第一端从细长主体的第一端延伸,细长的测量仪器主体具有标记,所述标记指示细长主体的第二端和定位测量仪器的缓冲器端之间的长度。
本公开还包括导管系统,该导管系统包括导管和具有内腔的肺动脉导管,其中所述导管延伸通过肺动脉导管的内腔。肺动脉导管可包括具有第一端、第二端、外围表面和与外围表面相对的内表面的细长的导管主体,所述内表面限定在细长的导管主体的第一端和第二端之间延伸的内腔。可膨胀球囊可以定位在细长的导管主体的外围表面上,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长的导管主体的外围表面的一部分限定流体密封的体积。膨胀内腔延伸通过细长的导管主体,膨胀内腔具有进入可膨胀球囊的流体密封的体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到流体密封的体积中和从流体密封的体积移动出以使球囊膨胀和紧缩。
本公开还提供一种导管,该导管包括具有第一端、第二端、外围表面和内表面的细长的导管主体,所述内表面限定至少部分地在细长的导管主体的第一端和第二端之间延伸的膨胀内腔;在细长的导管主体的外围表面上的可膨胀球囊,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长的导管主体的外围表面的一部分限定流体密封的体积,其中,膨胀内腔具有进入可膨胀球囊的流体密封体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到所述体积中以使球囊膨胀和紧缩;沿细长的导管主体的外表面定位的多个电极,所述多个电极位于可膨胀球囊和细长的导管主体的第一端之间;延伸通过细长的导管主体的导电元件,其中,导电元件将电流传导到所述多个电极中的至少一个电极中的两个或更多个的组合;以及从细长主体的外围表面侧向地延伸的第一锚固件,第一锚固件具有形成开放框架的支柱,所述开放框架具有外围表面,所述外围表面具有大于可膨胀球囊的最大外部尺寸的最大外部尺寸。
在一个示例中,第一锚固件定位在可膨胀球囊和沿细长的导管主体的外围表面定位的多个电极之间。细长的导管主体的包括多个电极的部分在被置于纵向压缩之下时可在预定的径向方向上弯曲。在另一示例中,第一锚固件定位在沿细长的导管主体的外围表面定位的多个电极和细长的导管主体的第一端之间。
细长的导管主体可还包括限定成形内腔的第二内表面,所述成形内腔从第一端朝向第二端延伸。成形丝线具有第一端和第二端,成形丝线可穿过成形内腔,其中成形丝线的第一端在细长的导管主体的第一端的近端并且成形丝线的第二端连接到细长的导管主体,以使得当将张力施加到成形丝线时成形丝线将弯曲赋予到细长的导管主体的具有多个电极的部分中。
导管的示例还可包括具有第一端、第二端、外围表面和内表面的细长的导管主体,所述内表面限定至少部分地在细长的导管主体的第一端和第二端之间延伸的膨胀内腔;在细长的导管主体的外围表面上的可膨胀球囊,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长的导管主体的外围表面的一部分限定流体密封的体积,其中,膨胀内腔具有进入可膨胀球囊的流体密封体积中的第一开口和在第一开口的近端的第二开口,以允许流体移动到所述体积中以使球囊膨胀和紧缩;从细长的导管主体的外围表面侧向地延伸的第一锚固件,该第一锚固件具有形成开放框架的支柱,所述开放框架具有外围表面,所述外围表面具有大于可膨胀球囊的直径的直径;具有电极细长主体和沿电极细长主体的外围表面定位的多个电极的电极导管;延伸通过电极导管的电极细长主体的导电元件,其中,导电元件将电流传导到所述多个电极中的至少一个电极中的两个或更多个的组合;以及连接到电极导管并且定位在第一锚固件和可膨胀球囊二者的近端的细长的导管主体的外围表面周围的附接环。
本公开的导管系统还可包括具有第一端、第二端、外围表面和内表面的细长的导管主体,所述内表面限定至少部分地在细长的导管主体的第一端和第二端之间延伸的膨胀内腔,其中,细长的导管主体包括延伸通过细长主体的第一端和第二端的细长的径向轴线,并且其中,第一平面延伸通过细长的径向轴线;在细长的导管主体的外围表面上的可膨胀球囊,该可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长的导管主体的外围表面的一部分限定流体密封体积,其中,膨胀内腔具有进入可膨胀球囊的流体密封体积中的第一开口和在第一开口的近端的第二开口,以允许流体移动到所述体积中以使球囊膨胀和紧缩;具有两个或更多个肋条的电极保持架,肋条从细长的导管主体的外围表面径向上远离地朝向可膨胀球囊延伸,其中,电极保持架的两个或更多个肋条弯曲到至少部分地由第一平面限定的第一体积中;在电极保持架的肋条中的每一个上的一个或多个电极,其中,在肋条的每一个上的一个或多个电极在第一体积中形成电极阵列;延伸通过电极保持架的两个或更多个肋条和细长的导管主体的导电元件,其中,导电元件将电流传导到电极阵列中的一个或多个电极的组合;以及具有两个或更多个肋条锚固保持架,肋条从细长的导管主体的外围表面径向上远离地朝向可膨胀球囊延伸,其中,锚固保持架的两个或更多个肋条弯曲到至少部分地由第一平面限定并且与第一体积相对的第二体积中,其中,锚固保持架的两个或更多个肋条不包括电极。
在一个示例中,导管包括具有第一端和第二端的细长主体。细长主体包括在第一端和第二端之间延伸的纵向中心轴线。细长主体还包括限定垂直于纵向中心轴线截取的凸多边形横截面形状的三个或更多个表面。导管还在细长主体的三个或更多个表面中的一个表面上包括一个或多个(但是优选地,两个或更多个)电极,其中导电元件延伸通过细长主体。导电元件可以将电流传导到一个或多个的组合,或者在单个电极的情况下,在系统中其他位置设置第二电极以使电流流动。举例来说,限定细长主体的凸多边形横截面形状的表面可以是矩形。其他形状是可能的。在一种示例中,一个或两个或更多个电极仅位于细长主体的三个或更多个表面中的一个表面上。一个或多个电极可以具有与细长主体的三个或更多个表面中的该一个表面共面的暴露面。细长主体的三个或更多个表面中的该一个表面还可以包括在该一个表面上方延伸的锚固结构。除了限定凸多边形横截面形状的表面之外,导管的细长主体还可以具有带有垂直于纵向中心轴线截取的圆形横截面形状的部分。该示例的导管还可以包括细长主体的外围表面上的可膨胀球囊。可膨胀球囊包括球囊壁,球囊壁具有内表面,该内表面连同细长主体的外围表面的一部分限定流体密封的体积。膨胀内腔延伸通过细长主体,膨胀内腔具有进入可膨胀球囊的流体密封的体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到流体密封的体积中以使球囊膨胀和紧缩。
在另一示例中,导管包括具有外围表面和在第一端和第二端之间延伸的纵向中心轴线的细长主体。该示例的细长主体具有由一系列沿着纵向中心轴线的预先限定的弯曲限定的偏移区域。预先限定的弯曲包括具有在纵向中心轴线上的第一弯曲和第二弯曲的第一部分、第一部分之后的第二部分(其中第二部分具有零曲率)(例如,直的部分)和第二部分之后的第三部分,第三部分具有第三弯曲和第四弯曲。可膨胀球囊定位在细长主体的外围表面上,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长主体的外围表面的一部分限定流体密封的体积。膨胀内腔延伸通过细长主体,膨胀内腔具有进入可膨胀球囊的流体密封的体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到流体密封的体积中以使球囊膨胀和紧缩。一个或多个电极沿着细长主体的偏移区域的第二部分定位在细长主体上。导电元件延伸通过细长主体,其中导电元件将电流传导到一个或多个电极的组合。导管的该示例的细长主体的各部分可以具有各种形状。例如,细长主体的第二部分可以形成螺旋的一部分。细长主体还可以具有限定垂直于纵向中心轴线截取的凸多边形横截面形状的三个或更多个表面,其中一个或多个电极位于细长主体的三个或更多个表面中的一个表面上。对于该示例,凸多边形横截面形状可以是矩形。一个或多个电极仅位于细长主体的三个或更多个表面中的一个表面上。一个或多个电极可以具有与细长主体的三个或更多个表面中的该一个表面共面的暴露面。
在另一示例中,导管包括具有外围表面和在第一端和第二端之间延伸的纵向中心轴线的细长主体。细长主体包括限定偏转内腔的表面,其中偏转内腔包括细长主体中的第一开口和第二开口。可膨胀球囊定位在细长的主体的外围表面上,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长的主体的外围表面的一部分限定流体密封的体积。膨胀内腔延伸通过细长主体,膨胀内腔具有进入可膨胀球囊的流体密封的体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到流体密封的体积中以使球囊膨胀和紧缩。一个或多个电极定位在细长主体上,其中偏转内腔的第二开口与细长主体上的一个或多个电极相对。导电元件延伸通过细长主体,其中导电元件将电流传导到一个或多个电极的组合。导管还包括细长的偏转构件,其中细长的偏转构件在与细长主体的一个表面上的一个或多个电极相对的方向上延伸通过偏转内腔的第二开口。
在另一示例中,导管包括具有外围表面和在第一端和第二端之间延伸的纵向中心轴线的细长主体。细长主体包括限定电极内腔的表面,其中电极内腔包括细长主体中的第一开口。导管还包括细长主体的外围表面上的可膨胀球囊,可膨胀球囊具有球囊壁,球囊壁具有内表面,该内表面连同细长主体的外围表面的一部分限定流体密封的体积。膨胀内腔延伸通过细长主体,膨胀内腔具有进入可膨胀球囊的流体密封的体积中的第一开口和在第一开口近端的第二开口,以允许流体移动到流体密封的体积中以使球囊膨胀和紧缩。导管还包括细长电极构件,其中细长电极构件延伸通过细长主体的电极内腔的第一开口,其中电极构件包括一个或多个电极和延伸通过电极内腔的导电元件,其中导电元件将电流传导到一个或多个电极的组合。细长电极构件可以形成远离细长主体的外围表面延伸的环。形成该环的细长电极构件可以位于与细长主体的纵向中心轴线共线的平面中。替代地,形成环的细长电极构件位于垂直于细长主体的纵向中心轴线的平面中。
根据本公开的一些方法并且如本文更全面地讨论的,将具有电极阵列的导管插入到肺动脉干中并定位在使得电极阵列被定位成其电极与右肺动脉的后表面、上表面和/或下表面接触的位置。从该位置,电流可以传送到电极阵列或者从电极阵列传送出,以选择性地调节心脏的自主神经系统。例如,电流可以传送到电极阵列或从电极阵列传送出,以选择性地调节自主神经系统的自主心肺神经,其可以调节心脏收缩性和/松弛性,在一些示例中超过心率。优选地,将电极阵列定位在沿着右肺动脉的后壁和/或上壁的部位,以使得与被传送在右肺动脉和/或左肺动脉中的其他部位处的电流相比,被传送到电极阵列或从电极阵列传送出的电流导致对心脏收缩性和/松弛性的最大影响并且对心率和/或氧消耗的最小影响。在某些示例中,对心脏收缩性的影响是为了增加心脏收缩性。在某些示例中,对心脏松弛性的影响是为了增加心脏松弛性。
当在本文中使用时,传送到电极阵列或从电极阵列传送出的电流可以呈时变电流的形式。优选地,这样的时变电流可以呈电流脉冲(例如,电流的至少一个脉冲)、一个或多个波形(例如,电流的连续波)或其组合中的一个或多个的形式。
如本文所讨论,本公开提供了用于治疗具有心脏(心脏具有肺动脉干)的患者的方法。肺动脉干的一些部分可以用右侧向平面和与右侧向平面平行的左侧向平面限定,右侧向平面沿着肺动脉干的右腔面穿过,其中左侧向平面沿着肺动脉干的左腔面穿过。右侧向平面和左侧向平面在大体与受试者(例如患者)身体的前和后方向对齐的方向上延伸。分支点定位于右侧向平面和左侧向平面之间,其中分支点帮助限定心脏的左肺动脉和右肺动脉的开始。方法还包括使具有电极阵列的导管朝向分支点移动通过肺动脉干,其中电极阵列包括一个或多个,优选两个或更多个电极。将电极阵列定位在左侧向平面右侧的右肺动脉中,其中一个或多个电极接触左侧向平面右侧的右肺动脉的后表面、上表面和/或下表面。在附加示例中,可以将电极阵列定位在右侧向平面右侧的右肺动脉中,其中一个或多个电极接触右侧向平面右侧的右肺动脉的后表面、上表面和/或下表面。方法的该示例还包括在分支点上侧(例如位于分支点上方)位置处使一个或多个电极接触在右肺动脉的后表面、上表面和/或下表面上。还可以将导管的至少一部分定位成与限定分支点的表面的一部分接触。在该示例中,导管的这一部分可以设置有这样的形状,其提供可以帮助抵靠分支点保持导管的这一部分的表面区域的增加。
在附加示例中,肺动脉干具有在垂直于左侧向平面和右侧向平面的平面上截取的直径,其中将电极阵列定位在右肺动脉中以从左侧向平面右侧的点延伸到分支点右侧大约三倍于肺动脉干的直径的点。右肺动脉还可以包括分支点,该分支点将右肺动脉分成至少两个附加动脉,该附加动脉在帮助限定左肺动脉和右肺动脉的开始的分支点的远端。可以将电极阵列定位在帮助限定左肺动脉和右肺动脉的开始的分支点和将右肺动脉分成至少两个附加动脉的分支点之间的右肺动脉中。一旦就位,就可以将电流提供到电极阵列的一个或多个电极或从电极阵列的一个或多个电极提供电流。可以响应于来自电极阵列的一个或多个电极或到电极阵列的一个或多个电极的电流来测量患者的心脏参数的值。根据心脏参数的值,可以对哪些电极被用于响应于心脏参数的值而提供电流进行改变。还可以对响应于心脏参数的值而提供的电流的性质进行改变。举例来说,这样的改变包括但不限于电压、安培数、波形、频率和脉冲宽度的改变。此外,可以响应于心脏参数的值来移动在右肺动脉的后表面、上表面和/或下表面上的一个或多个电极中的电极。提供到电极阵列的一个或多个电极或从电极阵列的一个或多个电极提供的电流可以被提供为到电极阵列的一个或多个电极或来自电极阵列的一个或多个电极的电流的至少一个脉冲。这样的心脏参数的例子包括但不限于测量患者心脏的压力参数、声学参数、加速度参数和/或电参数(例如,ECG)作为心脏参数。
本公开的若干方法允许对患者的心脏进行电神经调节,例如包括通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲,从定位在心脏的脉管系统内的第一位置处的至少第一传感器感测响应于一个或多个电脉冲的一个或多个心脏活动特性(例如,非电心脏活动特性),以及响应于一个或多个心脏活动特性调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。该方法可以提供对患者的辅助心脏治疗。
从定位在第一位置处的至少第一传感器感测可以包括从心脏的脉管系统中感测以下中的一个或多个:压力特性、加速度特性、声学特性、温度和血液化学特性。除了其他位置之外,第一传感器可以定位在心脏的左肺动脉干、右肺动脉、肺动脉分支血管或者肺动脉干中的一个中。一个或多个电脉冲可以可选地通过定位在心脏的左肺动脉、右肺动脉或者肺动脉干中的不包含第一传感器的一个中的导管传送。第一传感器还可以定位在心脏的肺动脉干中。
第一传感器的其他位置可以包括在心脏的右心室中以及心脏的左心房中。当定位在心脏的右心房中时,第一传感器可以可选地定位在心脏的右心房的间隔壁上。第一传感器还可以定位在右心室的间隔壁上。右心室和左心室共享间隔壁,所以右心室中或者在右心室的间隔壁上的传感器可以有利地用于检测指示左心室的特性。在某些示例中,对心脏收缩性的影响是为了增加心脏松弛性、收缩性和/或者心输出量。用于定位第一传感器的附加位置包括在心脏的上腔静脉、心脏的下腔静脉以及在心脏的冠状窦中。当定位在心脏的冠状窦中时,第一传感器可以用于感测温度或者血氧水平中的至少一个。
在一些示例中,第一传感器可以定位在左心房中(例如,通过在右心房和左心房之间的间隔壁中形成孔,或者通过使用卵圆孔未闭(PFO)或者房间隔缺损(ASD))。左心房中的传感器可以有用于检测指示左心室的特性。如果已经进入左心房,则在一些示例中,传感器可以定位在左心室本身中,这可以提供对与左心室关联的特性的最直接的测量。在一些示例中,传感器可以定位在左心室下游,包括主动脉、主动脉分支动脉等。当程序完成时,可以使用诸如Amplatzer,Helex,CardioSEAL或其他装置的封闭装置将产生的或者存在的任何孔封闭。左心室收缩性的其他测量可以包括侵入性方法,例如,将应变仪定位在心肌上以测量心肌松伸展的变化,将电极定位在左星状神经节附近以测量单或多单元活动,和/或将卡肤电极定位在交感神经纤维周围,以测量神经活动,例如复合动作电位。
一些方法可以包括从患者的皮肤表面感测一个或多个心脏特性,以及响应于来自于定位在心脏的脉管系统中的第一位置处的第一传感器的一个或多个心脏活动特性(例如,非电特性)和/或来自患者的皮肤表面的一个或多个心脏特性,调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。从患者的皮肤表面感测的一个或多个心脏特性可以包括例如心电图特性。
一些方法可以包括从定位在心脏的脉管系统中的第二位置处的至少第二传感器感测响应于一个或多个电脉冲的一个或多个心脏活动特性(例如,非电心脏活动特特性),以及响应于来自第一传感器的一个或多个心脏活动特性和/或来自第二传感器的一个或多个心脏活动特性,调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。
调整一个或多个电脉冲的特性可以包括各种响应。例如,调整一个或多个电脉冲的特性可以包括改变导管上的一个电极或多个电极中的哪个被用来传送一个或多个电脉冲。对于另一例子,调整一个或多个电脉冲的特性可以包括移动导管以将导管的一个或多个电极重新定位在心脏的肺动脉中。对于再一例子,调整一个或多个电脉冲的特性可以包括改变以下的至少一个:一个或多个电脉冲的电极极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长和/或波形。
可以指派从其传送一个或多个电脉冲的电极配置的层级。一个或多个电脉冲可以基于电极配置的层级传送,其中可以分析响应于一个或多个电脉冲感测的一个或多个心脏活动特性,并且可以基于该分析选择电极配置来用于通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲。层级可以指派给通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的每个特性,其中基于每个特性的层级传送一个或多个电脉冲。分析响应于一个或多个电脉冲感测的一个或多个非电心脏活动特性,并且可以基于该分析,选择电极配置来用于通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲。分析一个或多个心脏活动特性可以包括分析预定数量的一个或多个心脏活动特性。
在一些示例中,一种促进患者的心脏的治疗神经调节的方法包括将电极定位在心脏的肺动脉中以及将传感器定位在心脏的右心室中。该方法还包括经由刺激系统将第一系列电信号传送到电极。第一系列包括多个第一电信号。第一多个电信号中的每个包括多个参数。第一系列的第一多个电信号中的每个彼此的不同仅在于多个参数中的第一参数的量值。该方法还包括在将第一系列电信号传送到电极之后,经由刺激系统将第二系列电信号传送到电极。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的第二参数的量值。第二参数不同于第一参数。该方法还包括经由传感器确定指示响应于传送第一系列电信号和第二系列电信号的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,将治疗神经调节信号传送到肺动脉。选择的电参数包括第一参数的选择的量值和第二参数的选择的量值。第一和第二参数的选择的量值至少部分基于传感器数据。治疗神经调节信号增加心脏收缩性和/松弛性,在一些示例中超过心率。
该方法还包括经由刺激系统,将第三系列电信号传送到电极。第三系列包括第三多个电信号。第三多个电信号中的每个包括多个参数。第三系列的第三多个电信号中的每个彼此的不同仅在于多个参数中的第三参数的量值。第三参数不同于第一参数和第二参数。该方法还包括经由传感器确定指示响应于传送第三系列电信号的一个或多个非电心脏活动特性的传感器数据。选择的电参数可以包括第三参数的选择的量值。第三参数的选择的量值至少部分基于传感器数据。
该方法还可以包括确定第一系列和第二系列之间的期望的层级。肺动脉可以包括右肺动脉。一个或多个非电心脏活动特性可以包括压力特性、加速度特性、声学特性、温度和血液化学特性中的至少一个。确定传感器数据可以包括经由皮肤表面上的第二传感器确定指示响应于传送第一系列电信号和第二系列电信号的心电图特性的传感器数据。
第一参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合,并且可选地,第二参数可以是以下中的不同的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。第二参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。第一参数可以包括电流,而第二参数可以包括与定时有关的参数(例如,频率和占空比中的一个)。
在一些示例中,一种促进患者的心脏的治疗神经调节的方法包括将电极定位在心脏的肺动脉中,将传感器定位在心脏的右心室中,经由刺激系统将一系列电信号中第一电信号传送到电极,以及在传送第一电信号之后,经由刺激系统将所述一系列电信号中的第二电信号传送到电极。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。该方法还包括经由传感器确定指示响应于所述一系列电信号的传送的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,将治疗神经调节信号传送到肺动脉。选择的电参数包括第一参数的选择的量值。第一参数的选择的量值至少部分基于传感器数据。治疗神经调节信号增加心脏收缩性和/松弛性,在一些示例中超过心率。
肺动脉可以包括右肺动脉。肺动脉可以包括左肺动脉。肺动脉可以包括肺动脉干。一个或多个非电心脏活动特性可以包括压力特性、加速度特性、声学特性、温度和血液化学特性中的至少一个。确定传感器数据可以包括经由患者的皮肤表面上的第二传感器确定指示响应于传送所述一系列电信号的心电图特性的传感器数据。第一参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。
在一些示例中,一种促进患者的心脏的治疗神经调节的方法包括将第一系列电信号传送到在第一解剖学位置中的电极,以及在将第一系列电信号传送到电极之后,将第二系列电信号传送到电极。第一系列包括多个第一电信号。第一多个电信号中的每个包括多个参数。第一系列的第一多个电信号中的每个彼此的不同仅在于多个参数中的第一参数的量值。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的第二参数的量值。第二参数不同于第一参数。该方法还包括经由在不同于第一解剖学位置的第二解剖学位置中的传感器,感测指示响应于传送第一系列电信号和第二系列电信号的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,将治疗神经调节信号提供到第一解剖学位置。选择的电参数包括第一参数的选择的量值和第二参数的选择的量值。第一和第二参数的选择的量值至少部分基于传感器数据。治疗神经调节信号增加心脏收缩性和/松弛性。
该方法还可以包括将第三系列电信号传送到电极。第三系列包括第三多个电信号。第三多个电信号中的每个包括多个参数。第三系列的第三多个电信号中的每个彼此的不同仅在于多个参数中的第三参数的量值。第三参数不同于第一参数和第二参数。该方法还可以包括经由传感器感测指示响应于传送第三系列电信号的一个或多个非电心脏活动特性的传感器数据。选择的电参数可以包括第三参数的选择的量值。第三参数的选择的量值至少部分基于传感器数据。
该方法还可以包括确定第一系列和第二系列之间的期望的层级。第一解剖学位置可以包括右肺动脉。肺动脉可以包括左肺动脉。肺动脉可以包括肺动脉干。一个或多个非电心脏活动特性可以包括压力特性、加速度特性、声学特性、温度和血液化学特性中的至少一个。感测传感器数据可以包括经由皮肤表面上的第二传感器确定指示响应于传送第一系列电信号和第二系列电信号的心电图特性的传感器数据。
第一参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合,并且可选地,第二参数可以是以下中的不同的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。第二参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。第一参数可以包括电流,而第二参数可以包括与定时有关的参数(例如,频率和占空比中的一个)。
在一些示例中,一种促进患者的心脏的治疗神经调节的方法包括将一系列电信号中的第一电信号传送到在第一解剖学位置中的电极,以及在传送第一电信号之后,将所述一系列电信号中的第二电信号传送到电极。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。该方法还包括经由在不同于第一解剖学位置的第二解剖学位置中的传感器感测指示响应于所述一系列电信号的传送的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,将治疗神经调节信号提供到第一解剖学位置。选择的电参数包括第一参数的选择的量值。第一参数的选择的量值至少部分基于传感器数据。治疗神经调节信号增加心脏收缩性和/松弛性。
第一解剖学位置可以包括右肺动脉。第一解剖学位置可以包括左肺动脉。第一解剖学位置可以包括肺动脉干。一个或多个非电心脏活动特性可以包括压力特性、加速度特性、声学特性、温度和血液化学特性中的至少一个。感测传感器数据可以包括经由患者的皮肤表面上的第二传感器感测指示响应于所述一系列电信号的传送的心电图特性的传感器数据。第一参数可以是以下中的一个:极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或者电极组合。
在一些示例中,一种用于促进电信号到患者的心脏的传送的神经调节系统包括导管和刺激系统。导管包括导管主体,其包括:近端、远端、从近端朝着远端延伸的内腔以及外表面。导管还包括外表面上的电极。该电极配置成将电信号传送到患者的肺动脉。导管还包括在外表面上的传感器。该传感器配置成从患者的脉管系统中的位置感测心脏活动特性。刺激系统包括脉冲发生器,其配置成将第一系列电信号和第二系列电信号传送到电极。第一系列包括多个第一电信号。第一多个电信号中的每个包括多个参数。第一系列的第一多个电信号中的每个彼此的不同仅在于多个参数中的第一参数的量值。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的第二参数的量值。第二参数不同于第一参数。刺激系统还包括非暂时性计算机可读介质,其配置成存储指示响应于将第一系列电信号和第二系列电信号传送到电极的一个或多个非电心脏活动特性的传感器数据,以及处理器,其配置成至少部分基于传感器数据确定第一参数的选择的量值和第二参数的选择的量值。非暂时性计算机可读介质配置成存储选择的电参数,该选择的电参数包括第一参数的选择的量值和第二参数的选择的量值。脉冲发生器配置成使用选择的电参数将治疗神经调节信号传送到电极。
在一些示例中,一种用于促进电信号到患者的心脏的传送的神经调节系统包括导管和刺激系统。导管包括导管主体,其包括:近端、远端、从近端朝着远端延伸的内腔以及外表面。导管还包括外表面上的电极。该电极配置成将电信号传送到患者的肺动脉。导管还包括在外表面上的传感器。该传感器配置成从患者的脉管系统中的位置感测心脏活动特性。刺激系统包括脉冲发生器,其配置成将一系列电信号传送到电极。所述一系列包括第一电信号以及第二电信号。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。刺激系统还包括非暂时性计算机可读介质,其配置成存储指示响应于将所述一系列电信号传送到电极的一个或多个非电心脏活动特性的传感器数据,以及处理器,其配置成至少部分基于传感器数据确定第一参数的选择的量值。非暂时性计算机可读介质配置成存储选择的电参数,该选择的电参数包括第一参数的选择的量值。脉冲发生器配置成使用选择的电参数将治疗神经调节信号传送到电极。
在一些示例中,一种用于促进电信号到患者的心脏的传送的神经调节系统包括导管和成形丝线。导管包括导管主体,其包括:近端、远端、从近端朝着远端延伸的内腔以及外表面。导管还包括外表面上的电极。该电极配置成将电信号传送到患者的肺动脉。成形丝线配置成定位在导管主体的内腔中。该成形丝线包括屈曲部分。当成形丝线插入到导管主体的内腔中时,导管主体包括与成形丝线的屈曲部分对应的弯曲部分。
心脏活动特性可以包括非电心脏活动特性。非电心脏活动特性可以包括压力特性、加速度特性、声学特性、温度和血液化学特性中的至少一个。电极可以配置成将电信号传送到患者的右肺动脉。电极可以配置成定位在与传感器不同的位置中。导管系统可以包括多个电极,该多个电极包括所述电极。所述位置可以是肺动脉干、右心室、右心室的间隔壁、右心房、右心房的间隔壁、上腔静脉、肺分支动脉血管、下腔静脉或者冠状窦。神经调节系统还可以包括配置成从患者的皮肤表面感测心脏特性的皮肤传感器。所述心脏活动特性可以包括非电心脏活动特性,并且其中,心脏特性包括电心脏特性。电心脏特性可以包括心电图特性。
在一些示例中,一种患者的心脏的神经调节方法包括将包括电极的导管定位在患者的肺动脉中,将传感器定位在心脏的脉管系统中的位置中,经由刺激系统将第一组的一个或多个电脉冲传送到电极,该第一组的一个或多个电脉冲具有第一脉冲特性,以及在将第一组的一个或多个电脉冲传送到电极之后,经由刺激系统将第二组的一个或多个电脉冲传送到电极。该第二组的一个或多个电脉冲具有不同于第一脉冲特性的第二脉冲特性。该方法还包括使用电极配置将治疗电脉冲传送带肺动脉,所述电极配置通过分析响应于第一和第二组的电脉冲的传送而经由传感器感测的一个或多个心脏活动特性来选择。电极配置包括至少部分基于该分析的第一脉冲特性或者第二脉冲特性。治疗神经调节信号增加心脏收缩性和/松弛性,在一些示例中超过心率。
在一些示例中,一种患者的心脏的调节(例如,电神经调节)的方法包括通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲,从定位在心脏的脉管系统中的第一位置处的至少第一传感器感测响应于一个或多个电脉冲的一个或多个非电心脏活动特性,以及响应于一个或多个非电心脏活动特性,调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。
在一些示例中,从定位在第一位置处的至少第一传感器感测可以包括从心脏的脉管系统中感测以下中的一个或多个:压力特性、加速度特性、声学特性、温度或者血液化学特性。
在一个示例中,将第一传感器放置在心脏的左肺动、右肺动脉或者肺动脉干中的一个中。一个或多个电脉冲通过定位在心脏的左肺动脉、右肺动脉或者肺动脉干中的不包含第一传感器的一个中的导管传送。
可以将第一传感器定位在左肺动脉中。可以将第一传感器定位在右肺动脉中。可以将第一传感器定位在心脏中和周围的其他血管中,包括但不限于:肺动脉干、肺动脉分支血管、右心室、右心室的间隔壁、右心房、右心房的间隔壁、上腔静脉、下腔静脉或者冠状窦。第一传感器(例如,在冠状窦中)可以感测温度或者血氧水平中的至少一个。
在若干示例中,该方法可以包括从患者的皮肤表面感测一个或多个心脏特性,以及响应于一个或多个非电心脏活动特性和来自患者的皮肤表面的一个或多个心脏特性,调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。从患者的皮肤表面感测的一个或多个心脏特性可以包括心电图特性。该方法可以包括从定位在心脏的脉管系统中的第二位置处的至少第二传感器感测响应于一个或多个电脉冲的一个或多个非电心脏活动特性,以及响应于由第一传感器和第二传感器接收的一个或多个非电心脏活动特性调整通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。在若干示例中,调整一个或多个电脉冲的特性可以包括以下中的一个或多个:(i)改变导管上哪个电极用来传送一个或多个电脉冲;(ii)移动导管以将导管的电极重新定位在心脏的肺动脉中;(iii)改变以下中的至少一个:一个或多个电脉冲的电极极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形或电极组合。
在若干示例中,该方法可以包括指派从其传送一个或多个电脉冲的电极配置的层级,至少部分基于电极配置的层级传送一个或多个电脉冲,分析响应于一个或多个电脉冲感测的一个或多个非电心脏活动特性,以及至少部分基于该分析选择电极配置,以用于通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲。该方法可以包括对通过定位在心脏的肺动脉中的导管传送的一个或多个电脉冲的每个特性指派层级,至少部分基于每个特性的层级传送一个或多个电脉冲,分析响应于一个或多个电脉冲感测的一个或多个非电心脏活动特性,以及至少部分基于该分析选择电极配置,以用于通过定位在患者的心脏的肺动脉中的导管传送一个或多个电脉冲。分析一个或多个非电心脏活动特性可以包括分析预定数量的一个或多个非电心脏活动特性。
在若干示例中,不提供治疗神经调节。而是,若干示例出于校准或优化信号的目的(例如诊断或校准目的)而提供。
在一些示例中,一种非治疗校准方法包括将电极定位在心脏的肺动脉中,以及将传感器定位在心脏的右心室中。该系统还包括经由刺激系统将第一系列电信号传送到电极。第一系列包括多个第一电信号。第一多个电信号中的每个包括多个参数。第一系列的第一多个电信号中的每个彼此的不同仅在于多个参数中的第一参数的量值。该方法还包括在将第一系列电信号传送到电极之后,经由刺激系统将第二系列电信号传送到电极。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的第二参数的量值。第二参数不同于第一参数。该方法还包括经由传感器确定指示响应于传送第一系列电信号和第二系列电信号的一个或多个非电心脏活动特性的传感器数据。该方法还包括使用选择的电参数,确定将传送到肺动脉的治疗神经调节信号。选择的电参数包括第一参数的选择的量值和第二参数的选择的量值。第一和第二参数的选择的量值至少部分基于传感器数据。
在一些示例中,一种非治疗校准方法包括将一系列电信号中的第一电信号传送到在第一解剖学位置中的电极,以及在传送第一电信号之后,将所述一系列电信号中的第二电信号传送到电极。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。该方法还包括经由在不同于第一解剖学位置的第二解剖学位置中的传感器感测指示响应于所述一系列电信号的传送的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,确定将传送到第一解剖学位置的治疗神经调节信号。选择的电参数包括第一参数的选择的量值。第一参数的选择的量值至少部分基于传感器数据。
在一些示例中,一种装置包括第一部分和第二部分或基本由第一部分和第二部分组成。第一部分包括具有第一直径的第一环形部和从第一环形部远端地延伸的第一多个样条(spline)。第二部分包括具有第二直径的第二环形部和从第二环形部远端地且径向向外延伸的第二多个样条。第二直径小于第一直径。第二环形部能够在第一环形部中伸缩。第一多个样条中的每一个耦接到第二多个样条中的一个样条。在第二部分相对于第一部分远端纵向推进时,第一部分从塌缩状态扩张到扩张状态。在扩张状态下第一多个样条周向间隔。在第二部分相对于第一部分近端纵向缩回时,第一部分从扩张状态塌缩到塌缩状态。
第一多个样条中的每一个的远端可以耦接到第二多个样条中的一个样条。
第一多个样条中的每一个的远端可以在第二多个样条中的一个样条的远端近端耦接到第二多个样条中的该一个样条。第二多个样条的远端可以包括固定元件。第一多个样条中的至少一些可以包括电极。第一多个样条中的每个样条可以包括多个电极。多个电极可以至少部分地形成电极矩阵。
该装置可以还包括耦接到第一多个样条的膜,所述膜包括多个电极,所述多个电极至少部分地形成电极矩阵。从多个电极的最近端电极的近端到多个电极的最远端电极的远端的纵向长度可以在20mm至40mm之间。在扩张状态下第一多个样条的直径可以在15mm至35mm之间。
该装置可以还包括耦接到第一环形部的导管和在导管的内腔中并且耦接到第二环形部的内部构件。内部构件可以能够相对于导管移动以远端地推进和近端地缩回第二部分。第一环形部的近端可以耦接在导管的内腔的远端中。第二环形部的近端可以耦接在内部构件的内腔的远端中。内部构件可以在导丝上可跟踪。
该装置可以还包括耦接到内部构件的夹持器、接合夹持器的弹簧和耦接到内部构件的手柄元件。在手柄元件的远端推进时,弹簧可以被纵向扩张,内部构件可以被远端地纵向推进,第二部分可以被远端地纵向推进,并且第一部分可以从塌缩状态扩张到扩张状态。在手柄元件的近端缩回时,弹簧可以被纵向压缩,内部构件可以被近端地纵向缩回,第二部分可以被近端地纵向缩回,并且第一部分从扩张状态塌缩到塌缩状态。弹簧可以被配置为至少部分地近端地缩回手柄元件。
该装置可以还包括被配置为将手柄元件保持在远端地推进状态的锁定机构。锁定元件可以包括具有打开近端的多个臂。手柄元件可以被配置为在远端推进时延伸通过打开近端。锁定元件可以包括具有闭合近端的多个臂。手柄元件可以被配置为在远端推进时接合闭合近端。多个臂可以包括板弹簧。板弹簧可以被配置为至少部分地近端地缩回手柄元件。
第一多个样条可以不自扩张。第一多个样条可以自扩张。第一多个样条在扩张状态下可以包括非渐缩形状。第一部分可以包括第一切割海波管。第一环形部可以包括海波管并且第一多个样条可以包括多个丝线。第二部分可以包括第二切割海波管。
在一些示例中,装置包括多个样条、耦接到多个样条中的至少一个样条的结构和耦接到所述结构的电极或基本由多个样条、耦接到多个样条中的至少一个样条的结构和耦接到所述结构的电极组成。
该装置可以包括耦接到所述结构的多个电极。多个电极可以是所述电极。多个电极可以至少部分地形成电极矩阵。电极矩阵可以包括3×4矩阵。
所述结构可以耦接到多个样条中的至少两个样条。所述电极可以周向地位于多个样条中的两个样条之间。所述电极可以周向地与多个样条中的样条对齐。
该装置可以还包括耦接到多个样条中的一个的第二电极。所述结构可以包括经连接以形成开口图案的多个柔性股线(strand)。所述结构可以包括网格。所述结构可以包括编织或针织膜。所述结构可以包括在不被限制时具有扩张形状的形状记忆材料。所述结构可以包括绝缘材料。
在一些示例中,装置包括第一侧壁、与第一侧壁间隔的第二侧壁和第一侧壁和第二侧壁之间的第三侧壁或基本由第一侧壁、与第一侧壁间隔的第二侧壁和第一侧壁和第二侧壁之间的第三侧壁组成。第一侧壁、第二侧壁和第三侧壁至少部分地限定U形槽。该装置还在槽中包括多个导体和电连接到多个导体中的一个的电极。
该装置可以包括包含所述电极的多个电极。多个电极可以至少部分地形成电极矩阵。多个电极中的每一个可以电连接到多个导体中的一个。电极可以具有圆顶形状。
该装置还可以在多个导体和所述电极之间包括绝缘材料。该装置还可以在多个导体和第三侧壁之间包括绝缘材料。该装置还可以包括至少在所述电极的底部上方延伸的绝缘材料。绝缘材料可以包括圆顶形状。绝缘材料可以包括平坦上表面。绝缘材料可以包括凸出(crowned)表面。绝缘材料可以覆盖所述电极的尖锐边缘。
所述电极可以不具有未绝缘尖锐边缘。所述电极可以被配置为与血管壁表面间隔。
在一些示例中,系统包括多个所述装置。多个装置可以至少部分地形成电极矩阵。
在一些示例中,装置包括导管或基本由导管组成,所述导管包括内腔、固定结构和固定元件。固定结构包括第一侧、第二侧和扭转部。固定元件耦接到固定结构的第一侧。当固定结构在导管内腔内部时第一侧径向向内面向,而当固定结构在导管内腔外部时第一侧径向向外面向。
内腔可以成形为与固定结构和固定元件的形状对应。扭转部可以为180°。固定结构可以包括带状物(ribbon)。固定结构可以包括支柱。固定结构可以配置为在从导管部署时径向向外屈曲。固定结构可以包括锥形尖刺(conical spike)。
在一些示例中,装置可以包括固定结构、固定机构和将固定结构耦接到固定机构的附接点或基本由固定结构、固定机构和将固定结构耦接到固定机构的附接点组成。固定机构配置为在固定结构扩张时径向向外转动。固定机构配置为在固定结构塌缩时径向向内转动。在扩张状态,固定机构向固定结构外径向延伸。
固定机构可以包括孔。该装置还可以包括耦接到固定机构的不透射线标记。
该装置还可以包括从附接点远端地延伸的系链。系链可以包括沿着固定机构的纵向长度的屈曲部。屈曲部可以为固定机构的纵向长度的30%至70%之间。系链可以包括具有耦接到附接点的宽边缘的倾斜部。系链可以包括附接点近端的扭转部。
该装置还可以包括从固定结构远端地延伸的第二固定机构。固定结构、固定元件和附接点可以整体地从相同海波管切割出。固定结构可以包括电极。固定结构可以包括多个电极,该多个电极包括所述电极。多个电极可以至少部分地形成电极矩阵。
在一些示例中,形成装置的方法包括切割海波管以形成固定结构、固定机构和耦接固定结构和固定机构的附接点以及形状设置扩张形状或基本由上述步骤组成。扩张形状包括固定机构向固定结构外径向屈曲。在形状设置扩张形状之后,将固定机构配置为在固定结构扩张时径向向外转动而将固定机构配置为在固定结构塌缩时径向向内转动。
切割海波管还可以包括激光切割海波管。切割海波管可以包括形成从附接点近端地延伸的系链。形状设置可以包括使系链沿着固定机构的纵向长度屈曲。使系链屈曲可以为固定机构的纵向长度的30%至70%之间。形状设置可以包括使系链在附接点的近端处屈曲。形状设置可以包括在附接点近端在系链中形成扭转部。
在一些示例中,装置包括固定结构、固定臂和耦接到固定臂的固定机构或基本由固定结构、固定臂和耦接到固定臂的固定机构组成。固定结构包括孔、第一表面和与第一表面相对的第二表面。固定臂耦接到固定结构的孔内部。固定臂在第一状态下不在第一表面上方突出。
固定臂可以配置为在不被导管限制时径向向外曲折。固定机构可以在固定臂不被导管限制时在第一表面上方突出。固定臂可以配置为在不被导管限制时保持静止。固定机构可以在固定臂可以不被导管限制时不在第一表面上方突出。
固定结构和固定臂可以由同一片材料形成。孔可以从第一表面延伸到第二表面。孔可以从第一表面延伸到第二表面上方的点。固定机构可以包括锥形尖刺。固定机构可以包括纹理化表面。
在一些示例中,装置包括导管或基本由导管组成,所述导管包括内腔、从在导管的内腔中能够纵向地移动到导管的内腔之外的第一环和从在导管的内腔中能够纵向地移动到导管的内腔之外的第二环。导管、第一环和第二环中的至少一个包括第一电极。第一环和第二环中的至少一个可以在指状物端部处为抽头(pigtail)。
第一环可以包括包含所述第一电极的第一多个电极。第一多个电极可以至少部分地形成第一电极矩阵。第二环可以包括第二多个电极。第二多个电极可以至少部分地形成第二电极矩阵。第二环可以包括第二电极。
第一环可以包括第一部分和第二部分,第一部分包括第一多个电极中的电极,并且第二部分包括第一多个电极中的电极。第二部分可以与第一部分间隔。第二部分可以平行于第一部分。
第一环可以包括波动部段,波动部段包括波峰和波谷。波动部段可以包括第一多个电极。波动部段可以在波峰附近包括第一多个电极中的电极并且在波谷附近包括第一多个电极中的电极。
导管可以包括包含所述第一电极的多个电极。第一多个电极可以至少部分地形成第一电极矩阵。
第一环和第二环可以配置为至少部分同时地从导管的内腔被部署。第一环和第二环可以配置为顺序地从导管的内腔被部署。
该装置还可以包括从导管径向向外延伸的固定特征。固定特征可以包括无创伤硬环。
在一些示例中,使用装置的方法包括向肺动脉瓣远端推进导管、向肺动脉瓣远端推进导管、部署第一环和第二环、在部署第一环和第二环之后朝向肺动脉分叉远端地推进导管。第一环和第二环自定向,以使得第一环和第二环中的一个延伸到右肺动脉中而第一环和第二环中的另一个延伸到左肺动脉中。
方法可以包括远端地推进导管直到可以由肺动脉分叉限制推进。方法还可以包括向肺动脉瓣近端延伸固定特征。方法还可以包括尝试用第一电极捕获目标神经。
方法可以进一步包括:如果不能捕获目标神经,则将第一环和第二环撤回到导管的内腔中,近端地缩回导管,旋转导管,在旋转导管之后,重新部署第一环和第二环,并且,在重新部署第一环和第二环之后,朝向肺动脉分叉远端地推进导管。第一环和第二环是自定向的,以使得第一环和第二环中的一个延伸到右肺动脉中并且第一环和第二环中的另一个在相反方向上延伸到左肺动脉中。该方法可以进一步包括:如果不能捕获目标神经,则尝试用第二电极捕获目标神经。
在一些示例中,装置包括导管或基本上由导管组成,所述导管包括内腔和环,所述环能够从导管的内腔中纵向移动到导管的内腔之外。导管和环中的至少一个包括第一电极。
环可以包括包含所述第一电极的第一多个电极。第一多个电极可以至少部分地形成第一电极矩阵。
环可以包括第一部分和第二部分,第一部分包括第一多个电极中的电极,并且第二部分包括第一多个电极中的电极。第二部分可以与第一部分间隔。第二部分可以平行于第一部分。
环可以包括波动部段,波动部段包括波峰和波谷。波动部段可以包括第一多个电极。波动部段可以在波峰附近包括第一多个电极中的电极并且在波谷附近包括第一多个电极中的电极。
导管可以包括包含所述第一电极的第一多个电极。第一多个电极可以至少部分地形成第一电极矩阵。
环可以被配置为从导管的内腔部署出导管的远端。环可以被配置为从导管的内腔部署出导管的一侧。
该装置还可以包括从导管径向向外延伸的固定特征。固定特征可以包括无创伤硬环。
环可以在指状物端部处为抽头。
使用所述装置的方法可以包括将环从导管的内腔部署出;在部署环之后,在第一分支血管中朝向主血管推进导管;允许环在包括第一分支血管、主血管和第二分支血管的分叉处径向扩张;以及在允许环径向扩张之后,近端地缩回导管直到环接触第二分支血管。
第一分支血管可以包括左颈内静脉(left internal jugular vein),主血管可以包括左头臂静脉,并且第二分支血管可以包括左锁骨下静脉。
所述方法还可以包括延伸固定特征。
所述方法还可以包括尝试用第一电极捕获目标神经。目标神经可以包括胸心支神经。目标神经可以包括颈心神经。
导管可以包括配置为朝向目标神经屈曲的曲率。
在一些示例中,装置包括导管或基本上由导管组成,导管包括内腔、第一正弦丝线、与第一正弦丝线径向间隔的第二正弦丝线和多个电极。
多个电极中的每一个可以耦接到第一正弦丝线和第二正弦丝线中的至少一个。
所述装置还可以包括与第一正弦丝线和第二正弦丝线耦接的膜。多个电极中的每一个可以耦接到所述膜。所述膜可以配置为在扩张状态下具有弯曲形状。所述膜可以包括包含导线的柔性电路。
所述多个电极可以包括纽扣电极(button electrode)。所述多个电极可以包括管电极(barrel electrode)。所述多个电极可以包括圆柱形电极。所述多个电极可以包括定向电极。所述多个电极的中心可以纵向偏移。
导管可以包括第一部段和在第一部段远端的第二部段。第一部段可以具有圆形横截面。第二部段可以具有卵形横截面。第二部段可以被配置为包含第一正弦丝线和第二正弦丝线。
第一正弦丝线和第二正弦丝线在扩张状态下可以是平面的。第一正弦丝线和第二正弦丝线在扩张状态下可以成一个角度。第一正弦丝线和第二正弦丝线可以包括形状记忆材料。
在一些示例中,装置包括手柄、护套和可以移入和移出护套的电极系统或基本上由手柄、护套和可以移入和移出护套的电极系统组成。手柄包括重定位系统。所述重定位系统包括轨道和可以在轨道内滑动的握把(knob)。所述电极系统被配置为在握把在轨道中纵向移动时纵向移动并且在握把在轨道中横向移动或旋转移动时旋转移动。
轨道可包括纵向部段,沿第一方向从纵向部段延伸的第一横向部段,以及沿与第一方向相反的第二方向从纵向部段延伸的第二横向部段。第一横向部段可以与第二横向部段纵向偏离。第一横向部段可以与第二横向部段纵向对齐。
电极系统可以被配置成在握把在轨道中移动一纵向距离时移动相同纵向距离。电极系统可以配置成在握把在轨道中横向或旋转移动时旋转一圆周角。该装置还可包括旋转止动件,以将电极系统的旋转限制到该圆周角。
所述装置可进一步包括棘爪和凹槽,所述凹槽配置成在所述握把移动时与所述棘爪相互作用。所述棘爪可被配置为产生可听标记。
该装置还可以包括物理屏障,该物理屏障被配置为防止握把的意外移动。
在一些示例中,装置包括可扩张结构或基本上由可扩张结构组成,所述可扩张结构具有塌缩状态和扩张状态。可扩张结构在扩张状态下包括多个样条,每个样条包括近端部段,所述近端部段包括第一部分、在第一部分远端的第二部分和在第二部分远端的第三部分;在近端部分远端的中间部段;以及在中间部段远端的远端部段,远端部段包括第四部分、在第四部分远端的第五部分和在第五部分远端的第六部分。第一部分平行于纵向轴线。第二部分从第一部分径向向外延伸。第三部分从第二部分径向向外并横向于纵向轴线延伸到中间部段。第四部分从中间部段径向向内并横向于纵向轴线延伸。第五部分从第四部分径向向内延伸。第六部分从第五部分平行于纵向轴线延伸。多个样条中的至少两个中间部段被周向间隔并包括形成电极矩阵的多个电极。
可扩张结构可以是自扩张的。可扩张结构可以在致动机构操作时可扩张。
在扩张状态下,至少两个中间部段可以平行于纵向轴线。在扩张状态下,至少两个中间部段可以相对于纵向轴线凹入。在扩张状态下,至少两个中间部段可以相对于纵向轴线凸出。
多个样条的第一部分的对可以是平行的。多个样条的第六部分的对可以是平行的。多个样条的第一部分的对可以是扭曲的。多个样条的第六部分的对可以是扭曲的。
多个样条的中间部段的近端可以是纵向对齐的。多个样条的中间部段的近端可以是纵向偏移的。多个样条的中间部段的远端可以是纵向对齐的。多个样条的中间部段的远端可以是纵向偏移的。
所述多个样条还可包括周向地位于至少两个中间部段之间的样条。
多个样条可包括多个丝线。多个样条可由切割的海波管形成。
可扩张结构可进一步包括耦接到至少两个中间部段的膜。膜可包括电极矩阵。
该装置可进一步包括近端部分和耦接到近端部分并耦接到可扩张结构的导管轴。该装置还可包括致动器丝线。近端部分可包括致动器机构。致动器丝线可以是耦接到致动器机构并且耦接到可扩张结构。可扩张结构可以配置成在致动器机构操作时扩张。近端部分可以包括Y连接器,Y连接器包括配置成接纳导丝的第一分支和配置成将电极矩阵电连接到刺激系统的第二分支。
该装置可以进一步包括导管轴和可扩张结构之间的应变消除装置(strainrelief)。应变消除装置可以包括弹簧。应变消除装置可以包括切割的海波管。切割的海波管可以包括具有相同手性(sense)的多个螺旋。
可扩张结构可包括包含多个通道的远端毂(hub)。多个样条的远端部段可在远端毂的通道中滑动。远端部段可包括具有大于通道的尺寸的尺寸的远端。
在一些示例中,装置包括具有塌缩状态和扩张状态的可扩张结构或基本上由具有塌缩状态和扩张状态的可扩张结构组成。可扩张结构在扩张状态下包括多个臂,每个臂包括近端部段、在近端部段远端的中间部段和在中间部段远端的远端部段。多个臂的中间部段包括开口。多个样条的至少两个中间部段包括形成电极矩阵的多个电极。
可扩张结构可以是自扩张的。可扩张结构可以在致动机构的操作下扩张。
在扩张状态下,至少两个中间部段可以平行于纵向轴线。在扩张状态下,至少两个中间部段可以相对于纵向轴线凹入。在扩张状态下,至少两个中间部段可以相对于纵向轴线凸出。
多个样条的第一部分的对可以是平行的。多个样条的第六部分的对可以是平行的。多个样条的第一部分的对可以是扭曲的。多个样条的第六部分的对可以是扭曲的。
多个样条的中间部段的近端可以是纵向对齐的。多个样条的中间部段的近端可以是纵向偏移的。多个样条的中间部段的远端可以是纵向对齐的。多个样条的中间部段的远端可以是纵向偏移的。
多个样条还可包括周向地位于所述至少两个中间部段之间的样条。
多个样条可包括多个丝线。多个样条可由切割的海波管形成。
可扩张结构可进一步包括耦接到至少两个中间部段的膜。膜可包括电极矩阵。
所述装置还可包括近端部分和耦接到近端部分并耦接到可扩张结构的导管轴。装置还可包括致动器丝线。近端部分可包括致动器机构。致动器丝线可以耦接到致动器机构并且耦接到可扩张结构。可扩张结构可以配置成在致动器机构操作时扩张。近端部分可以包括Y连接器,Y连接器包括配置成接纳导丝的第一分支和配置成将电极矩阵电连接到刺激系统的第二分支。
该装置可以进一步包括导管轴和可扩张结构之间的应变消除装置。应变消除装置可以包括弹簧。应变消除装置可以包括切割海波管。切割的海波管可以包括具有相同手性的多个螺旋。
可扩张结构可包括包含多个通道的远端毂。多个样条的远端部段可在远端毂的通道中滑动。远端部段可包括尺寸大于通道的尺寸的远端。
在一些示例中,装置包括具有塌缩状态和扩张状态的可扩张结构或基本上由具有塌缩状态和扩张状态的可扩张结构组成。可扩张结构在扩张状态下包括多个样条,每个样条包括近端部段,所述近端部段包括第一部分、在第一部分远端的第二部分和在第二部分远端的第三部分;在近端部段远端的中间部段;在中间部段远端的远端部段,远端部段包括第四部分、在第四部分远端的第五部分和在第五部分远端的第六部分。第一部分平行于纵向轴线。第二部分从第一部分径向向外延伸。第三部分从第二部分并横向于纵向轴线径向向外延伸到中间部段。第四部分从中间部段径向向内并横向于纵向轴线延伸。第五部分从第四部分径向向内延伸。第六部分平行于纵向轴线从第五部分延伸。多个样条的中间部段具有相对于纵向轴线的波动形状。多个样条的至少两个中间部段包括形成电极矩阵的多个电极。
可扩张结构可以是自扩张的。可扩张结构可以在致动机构操作时可扩张。
多个样条的第一部分的对可以是平行的。多个样条的第六部分的对可以是平行的。多个样条的第一部分的对可以是扭曲的。多个样条的第六部分的对可以是扭曲的。
多个样条的中间部段的近端可以纵向对齐。多个样条的中间部段的近端可以纵向偏移。多个样条的中间部段的远端可以纵向对齐。多个样条的中间部段的远端可以纵向偏移。
中间部段可以包括峰和谷。至少两个中间部段的峰和谷可以纵向对齐。至少两个中间部段的峰和谷可以纵向偏移。
多个样条可包括多个丝线。多个样条可由切割的海波管形成。
可扩张结构可进一步包括耦接到至少两个中间部段的膜。膜可包含电极矩阵。
所述装置还可包括近端部分和耦接到近端部分并耦接到可扩张结构的导管轴。装置还可包括致动器丝线。近端部分可包括致动器机构。致动器丝线可以耦接到致动器机构并且耦接到可扩张结构。可扩张结构可以配置成在致动器机构操作时扩张。近端部分可以包括Y连接器,Y连接器包括配置成接纳导丝的第一分支和配置成将电极矩阵电连接到刺激系统的第二分支。
该装置可以进一步包括在导管轴和可扩张结构之间的应变消除装置。应变消除装置可以包括弹簧。应变消除装置可以包括切割的海波管。切割的海波管可以包括具有相同手性的多个螺旋。
可扩张结构可包括包含多个通道的远端毂。多个样条的远端部段可在远端毂的通道中滑动。远端部段可包括尺寸大于通道的尺寸的远端。
在一些示例中,装置包括具有塌缩状态和扩张状态的可扩张结构或基本上由具有塌缩状态和扩张状态的可扩张结构组成。可扩张结构在扩张状态下包括多个臂,每个臂包括近端部段、在近端部段远端的中间部段和在中间部段远端的远端部段。多个臂的中间部段包括正弦形状。多个样条的至少两个中间部段包括形成电极矩阵的多个电极。
可扩张结构可以是自扩张的。可扩张结构可以在致动机构操作时可扩张。
多个样条的第一部分的对可以是平行的。多个样条的第六部分的对可以是平行的。多个样条的第一部分的对可以是扭曲的。多个样条的第六部分的对可以是扭曲的。
多个样条的中间部段的近端可以是纵向对齐的。多个样条的中间部段的近端可以是纵向偏移的。多个样条的中间部段的远端可以是纵向对齐的。多个样条的中间部段的远端可以是纵向偏移的。
中间部段可以包括峰和谷。至少两个中间部段的峰和谷可以纵向对齐。至少两个中间部段的峰和谷可以纵向偏移
多个样条可包括多个丝线。多个样条可由切割的海波管形成。
可扩张结构可进一步包括耦接到至少两个中间部段的膜。膜可包括电极矩阵。
所述装置还可包括近端部分和耦接到近端部分并耦接到可扩张结构的导管轴。装置还可包括致动器丝线。近端部分可包括致动器机构。致动器丝线可以耦接到致动器机构并且耦接到可扩张结构。可扩张结构可以配置成在致动器机构操作时扩张。近端部分可以包括Y连接器,Y连接器包括配置成接纳导丝的第一分支和配置成将电极矩阵电连接到刺激系统的第二分支。
该装置可以进一步包括在导管轴和可扩张结构之间的应变消除装置。应变消除装置可以包括弹簧。应变消除装置可以包括切割的海波管。切割的海波管可以包括具有相同手性的多个螺旋。
可扩张结构可包括包含多个通道的远端毂。多个样条的远端部段可在远端毂的通道中滑动。远端部段可包括尺寸大于通道的尺寸的远端。
在一些示例中,装置包括纵向轴线和远端部分,或者基本上由纵向轴线和远端部分组成。远端部分包括第一可扩张结构和在第一可扩张结构远端的第二可扩张结构。第一可扩张结构具有塌缩状态和扩张状态。在扩张状态下,可扩张结构包括多个臂,每个臂包括近端部段、在近端部段远端的中间部段以及在中间部段远端的远端部段。多个臂位于包括纵向轴线的平面的第一侧上。多个样条的至少两个中间部段包括形成电极矩阵的多个电极;和
第二可扩张结构可包括斯旺-甘兹氏(Swan-Ganz)球囊。第二可扩张结构可在第一可扩张结构的远端0.25cm至5cm之间。
第一可扩张结构可以是自扩张的。第一可扩张结构可以在致动机构操作时可扩张。
多个样条可包括多个丝线。多个样条可由切割的海波管形成。
第一可扩张结构可以进一步包括耦接到至少两个中间部段的膜。膜可以包括电极矩阵。
所述装置还可包括近端部分和导管轴,所述导管轴耦接到所述近端部分并耦接到所述可扩张结构。所述导管轴可配置成贴近(appose)体腔壁。所述装置还可包括致动器丝线。近端部分可以包括致动器机构。致动器丝线可以耦接到致动器机构并且耦接到第一可扩张结构。第一可扩张结构可以配置成在致动器机构操作时扩张。近端部分可以包括Y连接器,其包括被配置为接纳导丝的第一分支和被配置为将电极矩阵电连接到刺激系统的第二分支。
第一可扩张结构可包括远端毂,该远端毂包括多个通道。多个样条的远端部段可在远端毂的通道中滑动。远端部段可以包括尺寸大于通道的尺寸的远端。
该装置可进一步包括从近端部分延伸到第二可扩张结构的管状构件。管状构件可包括内腔,该内腔配置成在将流体注入内腔时使第二可扩张结构膨胀。管状构件可以耦接到多个臂的远端部段。第一可扩张结构可在管状构件近端缩回时扩张。
在一些示例中,处理包括P波和S波的心电图信号的方法包括或者基本上由以下组成:检测第一S波的结束,估计第一P波的开始,以及在检测第一S波的结束与第一P波的估计开始之间刺激持续时间期间,提供人造信号。非暂时性计算机可读介质可以存储在被执行时执行该方法的可执行指令。
人造信号可以包括直线。直线可以是负值。直线可以是正值。
在一些示例中,心电图信号包括或者基本上由第一部分和第二部分组成,第一部分指示心脏在第一持续时间期间的电活动,第二部分不指示心脏在第一持续时间之后的第二持续时间期间的电活动。第一持续时间小于窦性节律。非暂时性计算机可读介质可以被配置为存储信号。
第一部分可以包括QRS复合波(complex)。第一部分可以包括PR间隔。第二部分可以包括ST部段。第二部分可以包括直线。直线可以是负值。直线可以是正值。
在一些示例中,处理心电图信号的方法包括或者基本上由以下组成:检测从由P波,Q波,R波,S波和T波组成的组中选择的第一类波的第一条件;在检测第一类波的第一条件之后开始的刺激持续时间之后,监测从由P波,Q波,R波,S波和T波组成的组中选择的第二类波的第二条件的监测持续时间。第二类波不同于第一类波;并且如果在监测持续时间期间可能未检测到第二类波的第二条件,则触发物理事件。非暂时性计算机可读介质可以存储在被执行时执行该方法的可执行指令。
第一条件可以包括第一类波的开始。第一条件可以包括第一类波的结束。第一条件可以包括第一类波的峰值。第二条件可以包括第二类波的开始。第二条件可以包括第二类波的结束。第二条件可以包括第二类波的峰值。第二条件可以包括第二类波的峰值。第一类波可以包括S波。第二类波可以包括P波。第二类波可以包括Q波。第二类波可以包括R波。物理事件可以包括终止刺激。物理事件可以包括发出警报。
在一些示例中,处理心电图信号的方法包括或者基本上由以下组成:在第一持续时间期间提供指示心脏的电活动的第一部分,第一部分包括真实的P波,真实的Q波,真实的R波,真实的S波和真实的T波;并且在第一持续时间之后的第二持续时间期间提供不指示心脏的电活动的第二部分,在第二持续时间期间进行心脏的刺激。非暂时性计算机可读介质可以存储在被执行时执行方法的可执行指令。
该部分可以包括直线。直线可以处于零。直线可以处于负值。直线可以处于正值。
第二部分可包括第一部分的复制。
第二部分可以包括人造窦性节律的至少一部分。人造窦性节律的该部分可以包括人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个。人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个可以成形为像真实的波。人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个可以形成为像方波。
在一些示例中,心电图信号包括或者基本上由第一部分和第二部分组成,第一部分指示心脏在第一持续时间期间的电活动,第二部分不指示心脏在第一持续时间之后的第二持续时间期间的电活动。第一部分包括真实的P波,真实的Q波,真实的R波,真实的S波和真实的T波。心脏的刺激发生在第二持续时间。非暂时性计算机可读介质可以被配置为存储信号。
第二部分可以包括直线。直线可以处于零。直线可以处于负值。直线可以处于正值。
第二部分可包括第一部分的复制。
第二部分可包括人造窦性节律的至少一部分。
人造窦性节律的该部分可以包括人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个。人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个可以成形为像真实的波。人造P波,人造Q波,人造R波,人造S波和人造T波中的至少一个可以成形为像方波。
在一些示例中,装置包括手柄、可扩张结构、外管和轴,或者基本上由上述组成。可扩张结构具有塌缩状态和自扩张状态。可扩张结构包括从近端毂延伸到远端毂的多个样条。多个样条中的每个样条包括近端部段、在近端部段远端的中间部段、在中间部段远端的远端部段,以及在所述多个样条中的第一样条上的第一电极。所述中间部段配置成在自扩张状态下径向向外延伸。所述外管包括耦接到所述手柄的近端和耦接到所述近端毂的远端。所述轴包括近端和远端。轴从手柄到远端毂延伸通过外管。手柄配置成使轴缩回。中间部段配置成在轴缩回时进一步径向向外延伸。
多个样条中的至少一个样条可以没有电极。多个样条中的每个样条的中间部段可以与近端部段形成第一角度和/或与远端部段形成第二角度。多个样条中的每个样条的近端部段和远端部段可以没有电极。第一样条可以包括包含第一电极的第一多个电极。第一多个电极可以形成电极阵列。该装置还可以在多个样条中的第二样条上包括第二电极。第一样条可包括包含第一电极的第一多个电极。第二样条可包括包含第二电极的第二多个电极。第一多个电极可包括五个电极。第二多个电极可包括五个电极。第一多个电极和第二多个电极形成电极阵列。第二样条可以在周向上与第一样条相邻。第一样条和第二样条可以形成第一样条对。该装置还可以包括第二样条对。第二样条对可以包括第三样条和第四样条,第三样条包括第三多个电极,第四样条包括第四多个电极。第四样条可以在周向上与第三样条相邻。第二样条对可以在周向上与第一样条对相邻。第一多个电极,第二多个电极电极,第三多个电极和第四多个电极可以形成电极阵列。电极阵列可以包括4×5阵列。多个样条中的至少四个周向上相邻的样条可以各自包括多个电极。多个样条中的至少一个样条可以没有电极。每个样条的近端部段和远端部段可以是直的。每个样条的中间部段可以是凹的。每个样条的近端部段和远端部段可以是直的。每个样条的中间部段可以是凸的。每个样条的近端部段和远端部段可以是直的。每个样条的中间部段可以是直的。多个样条中的每个样条还可以包括连接近端部段和中间部段的近端过渡部段和连接中间部段和远端部段的远端过渡部段。样条可以分组为周向上相邻的样条对。样条对中的每个样条可以沿着近端部段、中间部段和远端部段平行于样条对中的另一个样条。样条对中的每个样条沿着近端过渡部段和远端过渡部段可以不平行于样条对中的另一个样条。每个样条对的中间部段可以比近端部段和远端部段彼此间隔开更远。可扩张结构可以包括在近端毂和远端毂之间的纵向轴线。多个样条中的每个样条的近端部段可以径向地从纵向轴线发散,并且多个样条中的每个样条的远端部段可径向地朝向纵向轴线汇聚。
外管可以包括近端部分和远端部分。近端部分可以具有比远端部分更高的硬度。外管可以包括沿着外管的长度的多个纵向部分。该多个纵向部分中的每个纵向部分可以具有比多个纵向部分中的在其远端的纵向部分更高的硬度。多个纵向部分中的至少一个纵向部分可以配置有用于将至少一个纵向部分定位在特定的解剖学结构中的长度和硬度。特定的解剖学结构可以包括心脏腔室。特定的解剖学结构可以包括血管。血管可以包括右肺动脉。外管可以包括在外管的近端处的第一外径和在外管的远端处的第二外径。第一外径可以大于第二外径。外管的近端部分可包括第一多个层,其中外管的远端部分可包括第二多个层。第一多个层可包括比第二多个层多的层。外管可以包括连接到近端毂的铰接件。铰接件可以配置成在装置横向于外管的纵向轴线屈曲时抗拒扭结。铰接件可以包括包含近端和远端的线圈,线圈的近端围绕管件(tubing)的一部分并且线圈的远端围绕近端毂的一部分。铰接件可包括第一丝线、第二丝线和第三丝线,第一丝线包括螺旋绕组,第二丝线包括螺旋绕组并占据第一丝线的螺旋之间的空间,第三丝线包括螺旋绕组并且占据第一丝线之间的螺旋和第二丝线之间的螺旋之间的空间。外管可以包括管件。所述管件可以包括内径,所述内径配置成与近端毂的外径配合。所述管件可以配置成邻接近端毂的近端。所述管件可以在外管和近端毂之间形成流体密封。
包括电极的样条可以包括样条管,电极位于样条管的外表面上。该装置还可以包括样条管,该样条管至少部分地覆盖多个样条中的两个周向上相邻的样条。样条管可以配置成抑制两个周向上相邻的样条相对于彼此旋转。样条管可以沿着两个周向上相邻的样条的中间部段分成两个空间上分开的管状通道。多个样条的周向上相邻的样条可以分组成样条对,每个样条对包括至少部分地覆盖近端部段的近端管件和至少部分地覆盖远端部段的远端管件。近端管件和远端管件可以配置成抑制每个样条对的样条相对于彼此旋转。每个近端管件和远端管件可以包括热缩管件。多个样条的周向上相邻的样条可以被分组为样条对,每个样条对包括在近端屈曲的丝线,并且可以具有终止于远端的丝线末端。
近端毂可包括近端,远端,中心内腔,多个外围内腔和/或多个样条通道。中心内腔可从近端毂的近端延伸到近端毂的远端。轴可以可滑动地延伸通过近端毂的中心内腔。多个外围内腔可以从近端毂的中心内腔的径向向外。多个外围内腔可以配置成将流过外管的流体传递到近端毂的远端。多个样条通道可以从近端毂的远端近端地延伸到近端毂的远端部分中。多个样条的一个样条可以在近端毂的多个样条通道中的每个样条通道中。多个样条通道可以延伸通过近端毂的远端部分。多个样条的周向上相邻的样条可以分组成样条对,每个样条对包括在近端处屈曲的丝线。近端毂可包括在近端毂的远端部分的近端的多个凹部。每个样条对的丝线的屈曲近端可以在多个凹部中的凹部中。多个凹部可以配置成抑制多个样条在凹部近端移动。多个外围内腔中的至少一个外围内腔可以配置成接收从手柄延伸到电极的电导体。
远端毂可包括近端,远端,中心内腔和/或多个样条通道。中心内腔可从远端毂的近端延伸到远端毂的远端。轴可以可固定地耦接到远端毂的中心内腔。多个样条通道可以从远端毂的近端远端地延伸到远端毂中。多个样条中的一个样条可以在远端毂的多个样条通道中的每个样条通道中。远端毂的多个样条通道中的每个样条通道可以在远端毂的远端附近终止。远端毂的近端可以包括渐缩表面。远端毂的近端的渐缩表面可包括通向多个样条通道的开口。远端毂的近端的渐缩表面可配置成便于样条沿径向向外方向屈曲。远端毂的远端可以包括无创配置。
手柄可包括手柄基部和致动器。手柄基部可包括近端,远端和从近端延伸到远端的内腔。外管的近端可以耦接到手柄基部的内腔,轴可滑动地延伸通过手柄基部的内腔。致动器可附接到轴的近端,致动器可在近端方向和远端方向上相对于手柄基部移动。致动器可以配置成当在远端方向上移动时使可扩张结构扩张,并且当在近端方向上移动时压缩可扩张结构。手柄还可以包括外手柄,固定构件和/或锁定构件。外手柄可以从手柄基部延伸。固定构件可以包括附接到致动器的近端。锁定构件可以沿着固定构件定位在外手柄和致动器之间。锁定构件可以配置成沿着固定构件的纵向轴线移动并且固定在沿着固定构件的长度的某个位置处,以阻止致动器在远端方向上的移动。固定构件可以包括螺纹轴,并且锁定构件可以螺纹通道。通过围绕螺纹轴旋转锁定构件,锁定构件可以沿着固定构件纵向移动。
手柄可包括具有锁定配置和解锁配置的锁定构件。锁定构件可包括主体,主体包括近端和远端,从近端延伸到远端的通道,以及延伸到锁定构件的通道中的突起。致动器可以延伸通过锁定构件的通道。突起可以配置成在锁定构件处于锁定配置时阻止致动器相对于手柄基部在近端方向和远端方向中的至少一个方向上移动。当锁定构件处于解锁配置时,致动器可在近端方向和远端方向上移动。致动器可包括细长主体和沿细长主体的长度的纹理化表面。通过围绕致动器的细长主体旋转锁定构件,锁定构件可以在锁定配置和解锁配置之间移动。突起可以配置成在锁定位置与纹理化表面接合,并且配置成在解锁位置不与纹理化表面接合。锁定构件还可以包括远离主体延伸的突片,当锁定构件处于锁定配置时该突片可定位于相对于手柄基部的第一位置,并且当锁定构件处于解锁配置时可位于第二位置。纹理化表面可包括一系列脊部,锁定构件的突起配置成与脊部之间的凹口配合。锁定构件的通道可以是长方形的(oblong)。锁定构件可以配置成通过将锁定构件旋转大约四分之一圈而在锁定配置和解锁配置之间切换。手柄基部可以进一步包括在延伸到手柄基部的内腔中并且在外管的近端附近的侧壁中的孔。电导体可以通过手柄基部的孔从电插座延伸到外管中。
轴可包括内腔。轴的内腔可配置成接收导丝。轴的近端可配置成接收流体。轴的近端可连接到流体阀。轴可包括侧壁和侧壁中的孔,该孔配置成允许流体流出轴的内腔并流到近端毂。该装置可配置成将注入轴的流体传输到远端毂并通过外管传输到近端毂。轴可包括多个海波管。多个海波管可包括具有近端和远端的第一海波管和具有近端和远端的第二海波管。第一海波管的远端可以位于第二海波管的近端。第二海波管的近端可以位于第一海波管的远端。多个海波管可以包括三个海波管。所述多个海波管中的至少一个海波管可包括具有第一外径的近端部分和具有小于第一外径的第二外径的远端部分。所述多个海波管中的至少一个海波管可包括侧壁和通过所述侧壁的孔。
在一些示例中,调节神经的方法包括或者基本上由以下组成:将包括可扩张结构的装置的远端部分插入脉管系统中,允许可扩张构件自扩张,致动装置的手柄以进一步扩张可扩张结构以将可扩张结构锚固在脉管系统中,并激活装置的第一电极以刺激神经。该装置包括包含手柄的近端部分和包含可扩张结构的远端部分。可扩张结构具有塌缩状态和自扩张状态。可扩张结构包括从近端毂延伸到远端毂的多个样条。多个样条中的每个样条包括近端部段,在近端部段远端的中间部段以及在中间部段远端的远端部段。中间部段配置成在自扩张状态下径向向外延伸。可扩张结构包括在多个样条中的第一样条上的第一电极。
该装置可包括外管和轴。外管可包括耦接到手柄的近端和耦接到近端毂的远端。轴可包括近端和远端并可从手柄到远端毂延伸通过外管。手柄可以配置成当手柄被致动时相对于外管在近端方向上缩回轴,使得远端毂和近端毂更靠近地移动。
该方法可以进一步包括用针和注射器进入脉管系统。该方法还可以包括将导丝插入脉管系统中。该装置的轴可以包括从该装置的近端部分延伸到该装置的远端部分的内腔。将装置的远端部分插入脉管系统可以包括通过导丝将装置插入,使得导丝可以可滑动地接收在轴的内腔中。该方法还可以包括将导丝跟踪到脉管系统中的目标位置。该方法可以进一步包括将斯旺-甘兹氏导管插入脉管系统中。斯旺-甘兹氏导管可以包括位于导管远端的可膨胀球囊。该方法还可以包括使可膨胀球囊膨胀,允许球囊通过血液流动被携带到目标位置,通过斯旺-甘兹氏导管中的内腔将导丝插入到目标位置,使可膨胀球囊紧缩,并将斯旺-甘兹氏导管从脉管系统缩回。目标位置可以是右肺动脉。
该方法可以进一步包括将导引器插入脉管系统中。将医疗装置的远端部分插入脉管系统中可以包括通过导引器的护套插入装置。该方法还可以包括从装置的远端部分缩回导引器护套的远端和/或推动装置的远端部分超过护套的远端,使可扩张结构自扩张。该方法还可包括致动手柄上的锁定构件以防止可扩张结构被压缩。该方法可以进一步包括将可扩张结构定位在右肺动脉中。神经可以是心肺神经。可扩张结构还可以包括在多个样条中的第二样条上的第二电极,可扩张结构被定位成使得可沿第一样条、沿第二样条或在第一样条和第二样条之间定位神经。该方法可以进一步包括激活第二电极。第一样条可以在周向上与第二样条相邻。第一样条可以包括包含第一电极的第一多个电极,并且第二样条可以包括包含第二电极的第二多个电极。第一多个电极可包括五个电极,并且第二多个电极可包括五个电极。第一样条和第二样条可形成第一样条对。第一多个电极和第二多个电极可以形成电极阵列。可扩张结构还可以包括第二样条对,第二样条对包括第三样条和第四样条,第三样条包括第三多个电极并且第四样条包括第四多个电极。第一多个电极,第二多个电极,第三多个电极和第四多个电极可以形成电极阵列。电极阵列可以包括4×5阵列。该方法可以进一步包括抵靠脉管系统中的组织定位可扩张结构,使得神经可以位于抵靠在组织上的至少两个电极之间。神经可以位于抵靠在组织上的至少三个电极之间。神经可以位于抵靠在组织上的至少四个电极之间。激活第一电极可以包括施加第一极性的电压脉冲。该方法可以进一步包括在激活第一电极之前将电压的预脉冲施加到神经周围的组织,预脉冲是与第一极性相反的第二极性。该方法可以进一步包括测量右心室中的压力并且根据右心室中测量的压力来近似左心室中的压力。该方法可以进一步包括将返回导体定位在脉管系统中或皮肤上,所述返回导体配置成从激活的电极传导电流。
在一些示例中,用于增加心脏收缩性和/松弛性以治疗心力衰竭的装置包括手柄和可扩张结构,或者基本上由手柄和可扩张结构组成。可扩张结构具有塌缩状态和自扩张状态。可扩张结构包括从近端毂延伸到远端毂的多个样条。所述装置还包括在多个样条中的第一样条上的第一电极,从手柄延伸到近端毂的外管,以及从手柄到远端毂延伸通过外管的轴。手柄配置成使轴缩回。该装置配置成放置在肺动脉中并将能量从第一电极传送到目标组织以增加心脏收缩性和/松弛性以治疗心力衰竭。
多个样条中的至少一个样条可以没有电极。
第一样条可包括包含第一电极的第一多个电极。第一多个电极可形成电极阵列。
所述装置还可以包括在多个样条中的第二样条上的第二电极。第一样条可以包括包含第一电极的第一多个电极。第二样条可以包括包含第二电极的第二多个电极。第一多个电极可包括五个电极。第二多个电极可包括五个电极。第一多个电极和第二多个电极可形成电极阵列。第二样条可周向地与第一样条相邻。第一样条和第二样条可以形成第一样条对。该装置还可以包括第二样条对,第二样条对包括第三样条和第四样条,第三样条包括第三多个电极,第四样条包括第四多个电极。第四样条可周向地与第三样条相邻。第二样条对可周向地与第一样条对相邻。第一多个电极、第二多个电极、第三多个电极和第四多个电极形成电极阵列。电极阵列可以包括4×5阵列。多个样条中的至少四个周向上相邻的样条中的每一个可包括多个电极。
多个样条中的每个样条可包括近端部段、在近端部段远端的中间部段以及在中间部段远端的远端部段。中间部段可配置成在自扩张状态下径向向外延伸。中间部段可以配置成在轴缩回时进一步径向向外延伸。多个样条中的每个样条的中间部段可以与近端部段形成第一角度并且与远端部段形成第二角度。多个样条中的每个样条的中间部段可以弯曲到近端部段和远端部段。
多个样条中的每个样条的近端部段和远端部段可以没有电极。
每个样条的近端部段和远端部段可以是直的。每个样条的中间部段可以是凹的。每个样条的中间部段可以是凸的。每个样条的中间部段可以是直的。每个样条的中间部段可以是直的。每个样条的近端部段、远端部段和中间部段中的每一个可以是弧形的。
多个样条中的每个样条还可包括连接近端部段和中间部段的近端过渡部段,以及连接中间部段和远端部段的远端过渡部段。沿着近端过渡部段和远端过渡部段,样条对的每个样条可以不平行与样条对的另一个样条。
多个样条中的第一样条和第二样条可以形成第一样条对。第二样条可以在周向上与第一样条相邻。该装置还可以包括第二样条对,该第二样条对包括多个样条中的第三样条和多个样条中的第四样条。第四样条可以在周向上与第三样条相邻。样条对的每个样条可以沿着中间部段平行于样条对的另一个样条。样条对的每个样条可以沿着近端部段和远端部段平行于样条对的另一个样条。每个样条对的中间部段可以比近端部段和远端部段彼此间隔开更远。
多个样条中的至少一个样条可以没有电极。
可扩张结构可包括在近端毂和远端毂之间的纵向轴线。多个样条中的每个样条的近端部段可从纵向轴线发散而多个样条中的每个样条的远端部段可以朝向纵向轴线径向汇聚。
多个样条可以被配置为在越过可扩张结构的纵向轴线的平面的一侧上向外延伸。包括电极的多个样条中的样条可以被配置为在越过可扩张结构的纵向轴线的平面的一侧上向外延伸。包括电极的多个样条中的样条可以在周向占据100°至120°。不包括电极的多个样条中的样条可以被配置为在越过可扩张结构的纵向轴线的平面的第二侧上向外延伸。第二侧可以与一侧相对。
外管可包括近端部分和远端部分。近端部分可具有比远端部分更高的硬度。外管可包括沿外管长度的多个纵向部分。多个纵向部分中的每个纵向部分可以具有比其远端的多个纵向部分中的纵向部分更高的硬度。多个纵向部分中的至少一个纵向部分可以配置有用于将该至少一个纵向部分定位在特定解剖学结构中的长度和硬度。特定解剖学结构可以包括心脏腔室。特定解剖学结构可以包括血管。血管可以包括右肺动脉。
外管可包括在外管的近端处的第一外径和在外管的远端处的第二外径。第一外径可以大于第二外径。
外管的近端部分可包括第一多个层。外管的远端部分可包括第二多个层。第一多个层可包括比第二多个层更多的层。
外管可以包括连接到近端毂的铰接件。铰接件可以配置成在装置横向于外管的纵向轴线屈曲时抗拒扭结。铰接件可以包括包含近端和远端的线圈。线圈的近端可以围绕管件的一部分并且线圈的远端可以围绕近端毂的一部分。铰接件可包括第一丝线、第二丝线和第三丝线,第一丝线包括螺旋绕组,第二丝线包括螺旋绕组并占据第一丝线的螺旋之间的空间,第三丝线包括螺旋绕组并且占据第一丝线之间的螺旋和第二丝线之间的螺旋之间的空间。
外管可以包括管件(tubing)。管件可以包括内径,该内径配置成与近端毂的外径配合。管件可以配置成邻接近端毂的近端。管件可以在外管和近端毂之间形成流体密封。
第一样条可包括样条管。第一电极可位于样条管的外表面上。
所述装置还可包括样条管,样条管至少部分地覆盖多个样条中的两个周向上相邻的样条。样条管可配置成抑制该两个周向上相邻的样条相对于彼此旋转。样条管可以沿着两个周向上相邻的样条的中间部段分成两个空间上分开的管状通道。
多个样条中的周向上相邻的样条可以被分组为样条对。每个样条对可以包括至少部分地覆盖近端部段的近端管件和至少部分地覆盖远端部段的远端管件。近端管件和远端管件可以配置成阻止每个样条对的样条相对于彼此旋转。近端管件和远端管件中的每一个可以包括热缩管件。
多个样条中的周向上相邻的样条可以被分组成样条对。每个样条对可以包括在近端屈曲并且具有终止于远端的丝线末端的丝线。
近端毂可包括近端,远端和从近端毂的近端延伸到近端毂的远端的中心内腔。轴可以可滑动地延伸通过近端毂的中心内腔。该装置可以进一步包括多个外围内腔,其从近端毂的中心内腔径向外侧。多个外围内腔可以配置成将流过外管的流体传递到近端毂的远端。多个外围内腔中的至少一个外围内腔可以配置成接收从手柄延伸到第一电极的电导体。该装置还可以包括近端地从近端毂的远端延伸到近端毂的远端部分的多个样条通道。多个样条中的一个样条可以位于近端毂的多个样条通道的每个样条通道中。多个样条通道可以延伸通过近端毂的远端部分。多个样条中的周向上相邻的样条可以被分组为样条对。每个样条对可以包括在近端处屈曲的丝线。近端毂可包括在近端毂的远端部分的近端的多个凹部。每个样条对的丝线的屈曲近端可以在多个凹部中的凹部中。多个凹部可以配置成抑制多个样条在凹部近端移动。
远端毂可包括近端,远端和从远端毂的近端延伸到远端毂的远端的中心内腔。轴可以可固定地耦接到远端毂的中心内腔。该装置还可包括多个样条通道,所述样条通道远端地从远端毂的近端延伸到远端毂中。多个样条中的一个样条可位于远端毂的多个样条通道中的每个样条通道中。远端毂的多个样条通道中的每个样条通道可以在远端毂的远端附近终止。远端毂的近端可以包括渐缩表面。远端毂的近端的渐缩表面可包括通向多个样条通道的开口。远端毂的近端的渐缩表面可配置成便于样条沿径向向外方向屈曲。远端毂的远端可以是使用无创配置。
手柄可包括手柄基部,手柄基部包括近端、远端和从近端延伸到远端的内腔。手柄还可包括耦接到手柄基部的内腔的外管的近端。轴可以可滑动地延伸通过手柄基部的内腔。手柄还可以包括附接到轴的近端的致动器。致动器可以在近端方向上和在远端方向上相对于手柄基部可移动。致动器可以配置成当在远端方向上移动时使可扩张结构扩张,并且当在近端方向上移动时压缩可扩张结构。手柄还可以包括从手柄基部延伸的外手柄,包括附接到致动器的近端的固定构件,以及锁定构件,锁定构件沿着固定构件定位在外手柄和致动器之间。锁定构件可以配置成沿着固定构件的纵向轴线移动并且固定在沿着固定构件的长度的某个位置处,以阻止致动器在远端方向上的移动。
固定构件可以包括螺纹轴,并且锁定构件可以螺纹通道。通过围绕螺纹轴旋转锁定构件,锁定构件可以沿着固定构件纵向移动。
手柄还可包括具有锁定配置和解锁配置的锁定构件。锁定构件可包括主体,主体包括近端和远端,从近端延伸到远端的通道,以及延伸到锁定构件的通道中的突起。致动器可以延伸通过锁定构件的通道。突起可以配置成在锁定构件可能处于锁定配置时阻止致动器相对于手柄基部在近端方向和远端方向中的至少一个方向上移动。当锁定构件可能处于解锁配置时,致动器可在近端方向和远端方向上移动。致动器可包括细长主体和沿致动器的细长主体的长度的纹理化表面,通过围绕致动器的细长主体旋转锁定构件,锁定构件可以在锁定配置和解锁配置之间移动。突起可以配置成在锁定位置与纹理化表面接合,并且配置成在解锁位置不与纹理化表面接合。
锁定构件还可以包括远离主体延伸的突片。当锁定构件处于锁定配置时,该突片可定位于相对于手柄基部的第一位置。当锁定构件处于解锁配置时,该突片可位于第二位置。纹理化表面可包括一系列脊部。锁定构件的突起可以配置成与脊部之间的凹口配合。锁定构件的通道可以是长方形的。锁定构件可以配置成通过将锁定构件旋转四分之一圈而在锁定配置和解锁配置之间切换。
手柄基部可以进一步包括在延伸到手柄基部的内腔中并且在外管的近端附近的侧壁中的孔。电导体可以通过手柄基部的孔从电插座延伸到外管中。
轴可包括内腔。轴的内腔可配置成接收导丝。轴的近端可配置成接收流体。轴的近端可连接到流体阀。轴可以包括侧壁和侧壁中的孔。孔可以配置成允许流体流出轴的内腔并流到近端毂。
所述装置可以被配置成将注入轴的流体传输通过轴到远端毂并且通过外管传输到近端毂。轴可以包括多个海波管。多个海波管可以包括具有近端和远端的第一海波管,以及具有近端和远端的第二海波管。第一海波管的远端可以位于第二海波管的近端。第二海波管的近端可以位于第一海波管的远端。多个海波管可以包括三个海波管。多个海波管中的至少一个海波管可以包括具有第一外径的近端部分和具有小于第一外径的第二外径的远端部分。多个海波管中的至少一个海波管可包括侧壁和通过侧壁的孔。
该装置可进一步包括可扩张构件。该装置还可包括与可扩张构件流体连通的膨胀内腔。
在一些示例中,装置包括手柄和可扩张结构,或者基本上由手柄和可扩张结构组成。可扩张结构具有塌缩状态和自扩张状态。可扩张结构包括从近端毂延伸到远端毂的多个样条。该装置还包括在多个样条中的第一样条上的能量传送神经调节器,从手柄延伸到近端毂的外管,以及从手柄到远端毂延伸通过外管的轴,手柄配置成使轴缩回。能量传送神经调节器可包括电极。神经调节器可包括换能器。
在一些示例中,装置包括手柄和可扩张结构,或者基本上由手柄和可扩张结构组成。可扩张结构具有塌缩状态和自扩张状态。可扩张结构包括从近端毂延伸到远端毂的多个样条。该装置还包括位于多个样条中的第一样条上的神经调节器,从手柄延伸到近端毂的外管,以及从手柄到远端毂延伸通过外管的轴。手柄配置成使轴缩回。神经调节器可包括射频电极,超声元件,激光元件,微波元件,低温元件,热传递装置或药物输送装置。
装置的用途可以用于神经调节。装置的用途可以用于治疗心血管症状。装置的用途可以用于治疗急性心力衰竭。装置的用途可以用于治疗休克。装置的用途可以用于治疗瓣膜病。装置的用途可以用于治疗心绞痛。装置的用途可以用于治疗微血管缺血。装置的用途可以用于治疗心肌收缩障碍。装置的用途可以用于治疗心肌病。装置的用途可以用于治疗高血压。装置的用途可以用于治疗肺高血压。装置的用途可用于治疗系统性高血压。装置的用途可用于治疗直立性高血压。装置的用途可用于治疗端坐呼吸。装置的用途可用于治疗呼吸困难。装置的用途可用于治疗自主神经功能障碍。装置的用途可用于治疗晕厥。装置的用途可用于治疗血管迷走神经反射。装置的用途可用于治疗颈动脉窦过敏。装置的用途可用于治疗心包积液。该装置的用途可用于治疗心脏结构异常。
在一些示例中,调节神经的方法包括或者基本上由以下组成:将装置的远端部分插入脉管系统中,允许可扩张构件自扩张,致动手柄以进一步扩张可扩张结构以将可扩张结构锚固在脉管系统中,并激活第一电极以刺激神经。
该方法可以进一步包括用针和注射器进入脉管系统。进入脉管系统可以在颈静脉处。进入脉管系统可以在左颈静脉处。
该方法可以进一步包括将导丝插入脉管系统。轴可以包括从装置的近端部分延伸到装置的远端部分的内腔。将装置的远端部分插入脉管系统中可以包括通过导丝跟踪装置以将可扩张结构定位在脉管系统中的目标位置。导丝可以滑动通过轴的内腔。
该方法可以进一步包括将包括包含球囊的远端的斯旺-甘兹氏导管插入脉管系统,使球囊膨胀,允许球囊通过血流被携带到目标位置,通过斯旺-甘兹氏导管中的内腔插入导丝,使球囊紧缩,并将斯旺-甘兹氏导管从脉管系统缩回。
目标位置可以是肺动脉。目标位置可以是右肺动脉。目标位置可以是肺动脉干。目标位置可以是左肺动脉。
该方法可以进一步包括将导引器插入脉管系统中。将装置的远端部分插入脉管系统中可以包括通过导引器的护套将装置插入。该方法还可以包括近端地缩回导引器护套的远端和远端地推进装置的远端部分中的至少一个,允许可扩张结构自扩张。该方法还可包括致动手柄上的锁定构件。
神经可以包括心肺神经。神经可以包括右背内侧CPN。神经可以包括右背侧向CPN。神经可以包括右星状CPN。神经可以包括右迷走神经或迷走神经。神经可包括右颅内迷走神经CPN。神经可包括右尾侧迷走神经CPN。神经可包括右冠状心神经。神经可包括左冠状心神经。神经可包括左侧向心神经。神经可以包括左喉返神经。神经可以包括左迷走神经或迷走神经。神经可以包括左星状CPN。神经可以包括左背侧侧向CPN。神经可以包括左背内侧CPN。
该方法可包括抵靠脉管系统中的组织定位可扩张结构,使得神经位于第一电极和第二电极之间。
激活第一电极可以包括施加具有第一极性的电压脉冲。该方法还可以包括在激活第一电极之前,向神经周围的组织施加电压的预脉冲。预脉冲可以具有与第一极性相反的第二极性。
该方法可以进一步包括测量右心室中的压力并且根据右心室中测量的压力近似左心室中的压力。
该方法可以进一步包括将返回导体定位在脉管系统中。返回导体可以配置成从激活的电极传导电流。
从第一电极到返回电极的电流矢量可以远离心脏和气管中的至少一个。将返回导体定位在脉管系统中可以包括将返回电极定位在距第一电极至少5mm处。将返回导体定位在脉管系统中可以包括将返回电极定位在右心室中。将返回导体定位在脉管系统中可以包括将返回电极定位在上腔静脉中。将返回导体定位在脉管系统中可以包括将返回电极定位在头臂静脉中。
在一些示例中,用于增加心脏收缩性和/或松弛性的装置可以包括可扩张结构和多个电极或者替代地基本上由可扩张结构和多个电极组成。可扩张结构具有塌缩状态和扩张状态。可扩张结构包括可膨胀结构。可扩张结构可以被配置用于放置在肺动脉中。可扩张结构可以被配置用于从多个电极中的至少一个电极传送能量,以增加心脏的收缩性和/或松弛性。
可膨胀结构可以包括多个电极中的至少一个电极。可膨胀结构可以包括第一可膨胀元件和第二可膨胀元件。第一可膨胀元件可以包括第一球囊。第一可膨胀元件的第一球囊可以包括多个电极中的至少一个电极。第一可膨胀元件的第一球囊可以包括多个电极中的至少两个电极。至少两个电极可以在第一球囊上周向地间隔开。第一可膨胀元件可以包括第二球囊。第一可膨胀元件的第二球囊可以包括多个电极中的至少一个电极。第一可膨胀元件的第二球囊可以包括多个电极中的至少两个电极。至少两个电极可以在第二球囊上周向地间隔开。第一可膨胀元件可以包括在第一球囊和第二球囊之间的谷。谷可以包括多个电极中的至少一个电极。第二可膨胀元件可以包括第一球囊。第二可膨胀元件的第一球囊可以包括多个电极中的至少一个电极。第二可膨胀元件的第一球囊可以包括多个电极中的至少两个电极。至少两个电极可以在第一球囊上周向地间隔开。第二可膨胀元件可以包括第二球囊。第一可膨胀元件的第二球囊可以包括多个电极中的至少一个电极。第一可膨胀元件的第二球囊可以包括多个电极中的至少两个电极。至少两个电极可以在第二球囊上周向地间隔开。第二可膨胀元件可以包括在第一球囊和第二球囊之间的谷。谷可以包括多个电极中的至少一个电极。第一可膨胀元件可以包括球囊。第二可膨胀元件可以包括球囊。第三可膨胀元件可以包括球囊。第四可膨胀张元件可以包括球囊。第一可膨胀元件可以包括球囊。第二可膨胀元件可以包括球囊。第三可膨胀元件可以包括球囊。第四可膨胀元件可以包括球囊。第一可膨胀元件可以与第二可膨胀元件在周向上间隔开90°。第二可膨胀元件可以与第三可膨胀元件在周向上间隔开90°。第三可膨胀元件可以与第四可膨胀元件在周向上间隔开90°。第四可膨胀元件可以与第一可膨胀元件在周向上间隔开90°。第三可膨胀元件可与第四可膨胀元件在周向上间隔开90°。第四可膨胀元件可以与第一可膨胀元件在周向上间隔开90°。可膨胀结构可以包括第五可膨胀元件和第六可膨胀元件。可膨胀元件可以包括球囊。第二可膨胀元件可以包括球囊。第三可膨胀元件可以包括球囊。第四可膨胀元件可以包括球囊。第五可膨胀元件可以包括球囊。第六可膨胀元件可以包括球囊。第一可膨胀元件可以与第二可膨胀元件在周向上间隔开60°。第二可膨胀元件可以与第三可膨胀元件在周向上间隔开60°。第三可膨胀元件可以与第四可膨胀元件在周向上间隔开60°。第四可膨胀元件可以与第五可膨胀元件在周向上间隔开60°。第五可膨胀元件可以与第六可膨胀元件在周向上间隔开60°。第六可膨胀元件可以与第一可膨胀元件在周向上间隔开60°。可膨胀元件可以包括内腔。内腔可以在平行于装置的纵向轴线的方向上延伸。可扩张结构可以包括多个支柱。多个支柱可以包括多个电极中的至少一个电极。多个支柱中的至少一个支柱可以在周向上位于第一可膨胀元件的第一边缘与第二可膨胀元件的第二边缘之间。多个支柱中的至少另一个支柱可以在周向上位于第一可膨胀元件的第二边缘与第二可膨胀元件的第一边缘之间。至少一个支柱可以包括至少一个电极。至少一个其他支柱可以不包括电极。在若干个示例中,多个支柱中的任何支柱都不在周向上位于第一可膨胀元件的第二边缘和第二可膨胀元件的第一边缘之间。该装置可以进一步包括导丝内腔。该装置可以进一步包括斯旺-甘兹氏球囊。多个电极中的至少一个电极可以被激光烧蚀以增加表面积。多个电极中的至少两个电极被包覆成型以形成电极组件。该装置可以进一步包括第一压力传感器。第一压力传感器可以包括MEMS传感器。第一压力传感器可以被配置为用于放置在肺动脉中。该装置可以进一步包括第二压力传感器。第二压力传感器可以包括MEMS传感器。第二压力传感器可以被配置为用于放置在右心室中。
在一些示例中,用于增加心脏收缩性和/或松弛性的装置可以包括可扩张结构或者替代地基本上由可扩张结构组成。可扩张结构具有塌缩状态和扩张状态。可扩张结构包括多个支柱、处于扩张状态的敞开的远端以及多个电极。可扩张结构可以被配置用于放置在肺动脉中。可扩张结构可以被配置用于。可扩张结构可以被配置用于从多个电极中的至少一个电极传送能量,以增加心脏的收缩性和/或松弛性。多个支柱中的至少两个支柱可以连接在可扩张结构的近端的第一点处。多个支柱中的至少两个其他支柱可以连接在可扩张结构的近端的第二点处。该装置可以进一步包括耦接到第一点的第一系链。该装置可以进一步包括耦接到第二点的第二系链。当第一系链和第二系链朝着导管向近端缩回时,可扩张结构可以被配置成从扩张状态变为塌缩状态。第一系链和第二系链中的至少一个可以包括电耦合到多个电极的成束的电连接器。多个支柱中的至少两个支柱可以包括多个电极。至少两个支柱中的第一支柱可以包括第一电极组件,该第一电极组件包括多个电极中的至少两个电极。至少两个支柱中的第二支柱可以包括第二电极组件,该第二电极组件包括多个电极中的至少两个电极。至少两个支柱中的第一支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第一支柱。至少两个电极可以在纵向上间隔开。至少两个支柱中的第二支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第二支柱。至少两个电极可以在纵向上间隔开。第一支柱的至少两个支柱和第二支柱的至少两个支柱可以配置成在可扩张结构处于塌缩状态时嵌套。多个支柱中的至少四个支柱包括多个电极。至少四个支柱中的第一支柱可以包括第一电极组件,该第一电极组件包括多个电极中的至少两个电极。至少四个支柱中的第二支柱可以包括第二电极组件,该第二电极组件包括多个电极中的至少两个电极。至少四个支柱中的第三支柱可以包括第二电极组件,该第二电极组件包括多个电极中的至少两个电极。至少四个支柱中的第四支柱可以包括第二电极组件,该第二电极组件包括多个电极中的至少两个电极。至少四个支柱中的第一支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第一支柱。至少两个电极可以在纵向上间隔开。至少四个支柱中的第二支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第二支柱。至少两个电极可以在纵向上间隔开。至少四个支柱中的第三支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第三支柱。至少两个电极可以在纵向上间隔开。至少四个支柱中的第四支柱可以包括多个电极中的至少两个电极。至少两个电极中的每一个可以独立地耦接到第四支柱。至少两个电极可以在纵向上间隔开。第一支柱的至少两个电极、第二支柱的至少两个电极、第三支柱的至少两个电极以及第四支柱的至少两个电极被配置成在可扩张结构可以处于塌缩状态时嵌套。可扩张结构可以包括处于扩张状态的闭合近端。可扩张结构可以包括在多个支柱的远端的附加支柱。可扩张结构可以包括在多个支柱近端的附加支柱。多个电极可以位于多个支柱的在穿过可扩张结构的纵向轴线的平面的第一侧上的支柱上。在若干个示例中,平面的第二侧不包括电极。在若干个示例中,平面的第二侧不包括用于多个电极的纵向长度的支柱。
该装置可以进一步包括在可扩张结构的一侧上的导丝护套。多个支柱可以在导丝护套的近端逐渐变细。多个支柱可以包括六个支柱。四个支柱可以包括多个电极。两个支柱可以没有多个电极。在扩张状态下,四个支柱可以在将可扩张结构二等分的平面的第一侧上。两个支柱可以在该平面的相对侧上。多个支柱的近端可以耦接至毂。可扩张结构可以包括近端部分和远端部分,近端部分包括多个电极,远端部分包括在扩张状态下的敞开的远端。近端部分和远端部分可以是整体的。近端部分可以耦接到远端部分。近端部分可以具有第一径向刚度。远端部分可具有大于第一径向刚度的第二径向刚度。在扩张状态下,近端部分可以具有第一直径。远端部分可以具有小于第一直径的第二直径。第一直径可以比第二直径大2mm至8mm。近端部分可以包括分支的支柱。近端部分可以包括位于多个支柱的近端处的S形特征。
可扩张结构可以包括导丝护套,该导丝护套包括多个电极中的至少一些电极。导丝护套可以具有耦接到远端部分的远端。导丝护套可以被配置成响应于导丝护套的远端前进而径向向外弯曲。该装置可以进一步包括样条(spline),该样条包括多个电极中的至少一些其他电极。样条可以具有耦接到远端部分的远端。样条可以被配置成响应于样条的远端前进而径向向外弯曲。
在一些示例中,用于增加心脏收缩性和/或松弛性的装置可以包括可扩张结构,或者替代地基本上由可扩张结构组成。可扩张结构具有塌缩状态和扩张状态。可扩张结构包括第一丝线、第二丝线和导丝护套。导丝护套包括多个电极。导丝护套被配置成响应于导丝护套的远端前进而径向向外弯曲。第一丝线、第二丝线和导丝护套的远端耦接在一起。可扩张结构被配置为用于放置在肺动脉中。来自多个电极中的至少一个电极的能量传递被配置为增加心脏收缩性和/或松弛性。
该装置可以进一步包括包含多个第二电极的样条。样条可以具有耦接至第一丝线、第二丝线和导丝护套的远端的远端。样条可以被配置成响应于样条的远端前进而径向向外弯曲。导丝护套和样条可以被配置成独立地操作。导丝护套和样条可以被配置成独立地操作。导丝护套和样条可以被配置成在前进状态下嵌套。在一些示例中,一种定位该装置的方法包括以下步骤或替代地基本上由以下步骤组成:在塌缩状态下将可扩张结构前进到左肺动脉中,并将可扩张结构扩张到扩张状态。可以将第一丝线预加载到左肺动脉的第一侧壁上。可以将第二丝线预加载到左肺动脉的相对壁上。该方法可以进一步包括在扩张状态下向近端缩回可扩张结构。在缩回过程中,第二丝线可能会卡入右肺动脉的口中。该方法可以进一步包括向远端前进导丝护套。导丝护套可以径向向外弯曲到右肺动脉中。
在一些示例中,一种检测导管移动的方法包括以下步骤或替换地基本上由以下步骤组成:将第一传感器放置在第一体腔中;监测第一体腔的第一参数曲线;将第二传感器放置在第二体腔中;监测第二体腔的第二参数曲线;并且当第二参数曲线在第一时间之后的第二时间与第一参数曲线相同时,采取导管移动动作。第二参数曲线与第一时间的第一参数曲线不同。
第一传感器可以包括第一压力传感器。第一压力传感器可以包括MEMS传感器。第一参数曲线可以包括压力范围。第二传感器可以包括第二压力传感器。第二压力传感器可以包括MEMS传感器。第一参数曲线可以包括压力范围。第一体腔可以包括肺动脉,而第二体腔可以包括右心室。第一体腔可以包括右心室,而第二体腔可以包括右心房。第一体腔可以包括右心房,而第二体腔可以包括腔静脉。导管移动动作可以包括发出警报。导管移动动作可以包括停止神经刺激。导管移动动作可以包括使可膨胀元件塌缩。
在一些示例中,一种检测导管移动的方法包括以下步骤或替代地基本是由以下步骤组成:将传感器定位在右心室中并监测右心室的参数曲线的变化是否大于阈值。
阈值可以指示传感器靠着三尖瓣的移动。该阈值可以指示传感器靠近三尖瓣的移动。该参数可以包括压力。该传感器可以包括MEMS传感器。该方法可以进一步包括检测大于阈值的变化并且采取导管移动动作。导管移动动作可以包括发出警报。导管移动动作可以包括停止神经刺激。导管移动动作可以包括使可扩张元件塌缩。导管可以包括传感器。将传感器定位在右心室中可以包括向导管提供松弛。在导管向近端缩回时,导管可以被拉紧和/或传感器可以朝三尖瓣的环体移动。
在一些示例中,设置刺激向量的方法包括以下步骤或基本上由以下步骤组成:将第一电极设置为阴极并且将第二电极设置为阳极。第一电极和第二电极之间的线是第一刺激向量。该方法还包括将第三电极设置为阳极。第一电极和第三电极之间的线是第二刺激向量。该方法还包括选择第一刺激向量或第二刺激向量中的与第一ECG导联和第二ECG导联之间的主心电图(ECG)向量最正交的一个刺激向量作为刺激向量。
所选择的刺激向量可以减少对ECG信号的刺激噪声干扰的数量。第一ECG导联和第二ECG导联可以耦接至植入式心脏除颤器。该方法可以进一步包括将第一电极建立为当用作阴极时能够捕获神经。该方法可以进一步包括将第四电极设置为阳极。第一电极和第四电极之间的线可以是第三刺激向量。选择刺激向量可以包括选择第一刺激向量、第二刺激向量或第三刺激向量中的与主ECG向量最正交的一个刺激向量。该方法可以进一步包括将刺激向量用于治疗性刺激。
在一些示例中,设置刺激向量的方法包括以下步骤或基本上由以下步骤组成:将第一电极设置为阴极并且将多个其他电极中的每一个电极设置为阳极。多个其他电极不包括第一电极。第一电极与多个其他电极中的每个电极之间的线是电势刺激向量。该方法还包括选择电势刺激向量中的与第一ECG导联和第二ECG导联之间的主心电图(ECG)向量最正交的电势刺激向量作为刺激向量。
所选择的刺激向量可以减少对ECG信号的刺激噪声干扰的数量。第一ECG导联和第二ECG导联可以耦接到植入式心脏除纤颤器。该方法可以进一步包括将第一电极建立为当用作阴极时能够捕获神经。多个其他电极可以包括在2个电极和19个电极之间。多个其他电极可以包括在2个电极和11个电极之间。多个其他电极可以包括在2个电极和8个电极之间。多个其他电极可以围绕第一电极360°旋转。该方法可以进一步包括将刺激向量用于治疗性刺激。
在一些示例中,用于从心电图(ECG)消隐神经刺激的系统包括以下部件或替代地由以下部件组成:ECG消隐器,该ECG消隐器被配置为与配置为监测受试者的ECG系统通信;ECG放大器,该ECG放大器被配置为从ECG系统接收信号;和神经刺激系统,该系统被配置为对受试者施加刺激。ECG消隐器被配置为指示神经刺激系统在心跳期间不施加神经刺激,并且在神经刺激系统进行神经刺激期间消隐来自ECG系统的信号。
ECG消隐器可以被配置为预测何时将发生心跳。ECG消隐器可以使用确定性定时来预测何时将发生心跳。消隐来自ECG系统的信号可以包括操纵来自ECG系统的数据并将经操纵数据发送至ECG放大器。消隐来自ECG系统的信号可以包括在刺激脉冲期间将ECG信号保持在恒定电压下。神经刺激系统可以包括ECG消隐器。
在一些示例中,修改心电图(ECG)波形的方法包括以下步骤或基本上由以下步骤组成:在第一持续时间内检测ECG的R波;在第一持续时间内测量ECG的R至R间隔;计算R至R间隔的加权总和平均值;使用加权总和平均值预测下一个心跳的窗口;并且在预测的窗口期间消隐神经刺激。
计算加权总和平均值可以包括排除异常值。该方法可以包括基于第二持续时间来计算加权总和平均值。第二持续时间可以与第一持续时间重叠。使神经刺激消隐可以包括允许在预期的T波和预期的Q波之间进行神经刺激。使神经刺激消隐可以包括允许在预期的S波和预期的Q波之间进行神经刺激。使神经刺激消隐可以包括允许在预期的S波和预期的P波之间进行神经刺激。使神经刺激消隐可以包括使用预测的窗口设置消隐时段。消隐时段可以包括在预测的R波之后的300毫秒。消隐时段可以包括在预测的R波之后的700ms。消隐时段可以包括下一个预测的R波之前的300ms。消隐时段可以包括下一个预测的R波之前的700毫秒。消隐时段可以包括在预测的R波之后的预测窗口的30%。消隐时段可以包括在预测的R波之后的预测窗口的70%。消隐时段可以包括在下一个预测的R波之前的预测窗口的30%。消隐时段可以包括在下一个预测的R波之前的预测窗口的70%。
在一些示例中,一种用于从心电图(ECG)过滤噪声的系统包括以下部件或可选地基本上由以下部件组成:滤波器组件,该滤波器组件被配置为与被配置为监测受试者的ECG引联通信;ECG系统,该ECG系统被配置为从ECG导耦接收信号;和神经刺激系统,该神经刺激系统被配置为对受试者施加刺激。滤波器组件被配置为产生噪声滤滤波信号并将噪声滤波信号发送至ECG系统,该噪声滤波信号包括从来自ECG导联的信号减去来自神经刺激系统的噪声。
滤波器组件可以包括:ECG输入,该ECG输入被配置为耦接至ECG导联;ECG输出,该ECG输出被配置为耦接至ECG系统;以及滤波器,该滤波器通信地位于ECG输入和ECG输出之间。滤波器可以包括低通滤波器。滤波器可以包括小于神经刺激频率的截止频率。滤波器可以包括陷波滤波器。滤波器可以调整到一频率。神经调节系统可以被配置为设置该频率。滤波器组件可以包括用于手动或电子地设置频率的输入。频率可以是20Hz。频率可以是10Hz。ECG输出可以包括模仿ECG导联的丝线。滤波器组件可以进一步包括通信地位于ECG输入和ECG输出之间的模数转换器,以及通信地位于滤波器和ECG输出之间的数模转换器。神经刺激系统可以包括滤波器组件。
在一些示例中,用于使神经刺激频率与心电图(ECG)监测频率匹配的神经调制系统包括以下元素或基本上由以下元素构成:被配置为接收ECG系统操作频率的输入;和可调节以匹配ECG系统操作频率的神经刺激频率。
ECG系统操作频率可以是50Hz。ECG系统操作频率可以是60Hz。系统可以被配置为调节至少一个刺激参数。至少一个刺激参数可以包括振幅、脉冲宽度、占空比或波形。该系统可以被配置为确定治疗频率。至少一个刺激参数的调节可以使治疗频率下的神经刺激近似。
在一些示例中,电极组件包括以下部件或以下部件组成:支柱的一部分,该支柱的一部分包括第一侧面、与第一侧面相对的第二侧面以及在第一侧面和第二侧面之间的厚度;支柱的一部分中的孔;在支柱的第一侧面和支柱的第二侧面上的电绝缘材料;穿过支柱的第一侧面插入并从支柱的第二侧脱出的电极;和导体,该导体电耦接到电极。电极包括在支柱的第一侧上的型锻部分。
支柱可以是激光切割的支柱。孔可以被激光切割。支柱的第一侧面可以包括通道。导体可以位于通道中。该组件可以进一步包括在电极的型锻部分上方的电绝缘材料。该组件可以进一步包括在支柱的该部分中的多个孔以及在多个孔的每一个孔中的一个电极,并且包括在支柱的第一侧上的型锻部分。该组件可以进一步包括多个支柱部分,每个支柱部分均包括在一个支柱的孔中的至少一个电极,并且包括在一个支柱的第一侧上的型锻部分。
在一些示例中,一种使用神经刺激器以使神经刺激器移动来监测施加到受试者的神经刺激的效果的方法,该方法包括:停止施加神经刺激;在停止施加神经刺激之后,监测衰减到基线的信号;在监测到衰减到基线的信号之后,恢复神经刺激;并且在恢复神经刺激之后,监测信号以检测神经刺激器的移动。
在恢复神经刺激之后监测信号可以包括监测信号的方向的变化。在有利方向上的变化可以确认神经的结合。该方法可以包括检测在有利方向上的变化,以及滴定(titrating)神经刺激器。在不利方向上的变化可以确认神经未接合。该方法可以包括检测在不利方向上的变化,以及评估神经刺激器的位置。评估神经刺激器的位置可以包括荧光检查。该方法可以进一步包括使用神经刺激器的不同电极。该方法可以进一步包括移动神经刺激器。在恢复神经刺激之后监测信号可以包括监测信号的大小的变化。
大于阈值的变化可以确认神经的接合。该方法可以包括检测在有利方向上的变化,以及滴定神经刺激器。小于阈值的变化可以确认神经未接合。该方法可以包括检测在不利方向上的变化,以及评估神经刺激器的位置。评估神经刺激器的位置可以包括荧光检查。该方法可以进一步包括使用神经刺激器的不同电极。该方法可以进一步包括移动神经刺激器。
停止施加神经刺激可以包括将刺激降低到亚阈值水平。当受试者处于稳定状态时,停止施加神经刺激。每天一次停止施加神经刺激或修改神经刺激的参数。在受试者处于晚上时可以停止施加神经刺激或修改神经刺激的参数。在受试者入睡时可以停止施加神经刺激或修改神经刺激的参数。在一天中以规定的时间间隔间歇性地停止施加神经刺激或修改神经刺激的参数。
在一些示例中,一种使用神经刺激器以使神经刺激器移动来监测施加到受试者的神经刺激的效果的方法包括:施加包括第一值的参数的神经刺激;将神经刺激的参数修改为不同于第一值的第二值并且继续施加神经刺激;在修改神经刺激的参数之后,监测信号;在监测信号之后,恢复包含处于第一值的参数的神经刺激;并且在恢复包含处于第一值的参数的神经刺激之后,监测信号以检测神经刺激器的移动。
该参数可以包括振幅。该参数可以包括脉冲宽度。该参数可以包括频率。该参数可以包括占空比。该参数可以包括波形。第一值可以小于第二值。第一值可以大于第二值。
在恢复包括处于第一值的参数的神经刺激之后监测信号可以包括监测信号方向的变化。在有利方向上的变化可以确认神经的结合。该方法可以包括检测在有利方向上的变化,以及滴定神经刺激器。在不利方向上的变化可以确认神经未接合。该方法可以包括检测在不利方向上的变化,以及评估神经刺激器的位置。评估神经刺激器的位置可以包括荧光检查。该方法可以进一步包括使用神经刺激器的不同电极。该方法可以进一步包括移动神经刺激器。
在恢复神经刺激之后监测信号可以包括监测信号的大小的变化。大于阈值的变化可以确认神经的接合。该方法可以包括检测在有利方向上的变化,以及滴定神经刺激器。小于阈值的变化可以确认神经未接合。该方法可以包括检测在不利方向上的变化,以及评估神经刺激器的位置。评估神经刺激器的位置可以包括荧光检查。该方法可以进一步包括使用神经刺激器的不同电极。该方法可以进一步包括移动神经刺激器。
停止施加神经刺激可以包括将刺激降低到亚阈值水平。当受试者处于稳定状态时,可以停止施加神经刺激。可以每天一次停止施加神经刺激或修改神经刺激的参数。在受试者处于晚上时可以停止施加神经刺激或修改神经刺激的参数。在受试者入睡时可以停止施加神经刺激或修改神经刺激的参数。在一天中以规定的时间间隔间歇性地停止施加神经刺激或修改神经刺激的参数。
在一些示例中,导管系统包括被配置为插入受试者的脉管系统中的远端部分。远端部分包括可扩张结构和多个电极组件。可扩张结构具有压缩状态和扩张状态。可扩张结构包括多根缠结的丝线。
多根缠结丝线中的每根丝线可以在缠结的可扩张结构的远端处朝向可扩张结构的近端弯曲。多根缠结的丝线可以被编织。屈曲部的每一侧上的多根缠结丝线的端部部分可以平行于纵向轴线以并排对布置。该系统可以进一步包括覆盖每对并排丝线的至少一部分的聚合物管线。每对并排丝线的一个端部部分可以远离可扩张结构的近端被截断。每对并排丝线的另一端部部分可径以向向内向近端毂系统延伸,以形成多个辐条(spoke)。
近端毂系统可以包括外带、在外带的径向内侧的内带以及适配器,该适配器包括在外带的径向内侧的第一纵向段和在内带的径向内侧的第二纵向段。丝线的另一端部部分可以在内带的径向内侧。适配器可以包括多个径向突起和多个通道。丝线的另一端部部分可以分别位于多个通道中(例如,每个通道中的一个丝线端部部分)。内带和外带中的至少一个可以包括不透射线材料。
该系统可以进一步包括外部护套和在外部护套的径向内侧的内部构件。毂系统可以耦接到内部构件。外部护套可以被配置为将可扩张结构保持在压缩状态。可扩张结构可以被配置为在外部护套向内部构件的近端相对纵向移动时从压缩状态朝向扩张状态扩张。可扩张结构可以被配置为在外部护套向内部构件的远端相对纵向移动时朝向压缩状态压缩。
内部构件可以包括第一端口和靠近第一端口的第二端口。第一端口可以相对于第二端口在周向上偏移。内部构件可以包括靠近第一端口的不透射线标记。内部构件可以包括靠近第二端口的不透射线标记。
可扩张结构可以具有第一纵向部段和第二纵向部段。第一纵向部段的至少一个特性可以不同于第二纵向部段的特性。该特性可以包括编结角。该特性可以包括径向力。
多个电极组件中的每一个可以包括第一绝缘层、第二绝缘层、在第一绝缘层和第二绝缘层之间的多个电极、以及在第一绝缘层和多个电极之间的多个导体。多个导体中的每个导体可以电连接到多个电极中的一个电极。
在一些示例中,电极组件包括以下结构或者替代地由以下结构组成:第一绝缘层、第二绝缘层、在第一绝缘层和第二绝缘层之间的多个电极、以及在第一绝缘层和多个电极之间的多个导体。多个导体中的每个可以电连接到多个电极中的一个电极。
第一绝缘层可以包括纵向通道。第一绝缘层可以包括具有内腔的管。管的内腔可以与通道流体连通。第一绝缘层可以包括在管的侧面中的孔。孔可以在通道的近端处。多个导体可以延伸穿过管的内腔。成对的多根丝线可以延伸到多个电极组件的管的内腔的近端中。近端可以纵向偏移。多个电极组件可以形成矩形。近端可以逐渐地在纵向上偏移,使得多个电极组件形成平行四边形。该系统可以进一步包括在可扩张构件的远侧的鼻部。鼻部可以包括锥体。鼻部可以包括:远端部段,该远端部段包括至少部分地限定多个通道的多个突起;以及近端部段,该近端部段没有突起。
多个导体可以延伸穿过通道。第一绝缘层可以包括多个孔。成对的多根丝线可以穿过孔延伸到通道中。多个孔可以在第一绝缘层的内表面上。多个孔可以在第一绝缘层的侧表面上。
每个电极组件的邻近多个孔的第一纵向段可以耦接至可扩张结构。每个电极组件的远离多个孔的第二纵向段可以相对于可扩张结构移动。
第一纵向段可以包括至少一个电极。第二纵向段可以包括至少一个电极。第一纵向段可以包括多个电极。第二纵向段可以包括多个电极。
在内表面上,第一绝缘层可以包括多个孔。成对的多根丝线可以通过其中一个孔延伸到通道中。多个孔中的每个孔可以与多个孔中的相邻孔在纵向上隔开。
多个孔可以包括近端孔和远端孔。多根丝线中的第一对丝线可以延伸到多个电极组件的第一电极组件的近端孔中。多根丝线中的第二对丝线可以延伸到多个电极组件中的第二电极组件的远端孔中。第一电极组件可以在周向上邻近第二电极组件。多根丝线中的第三对可以延伸到多个电极组件中的第三电极组件的近端孔中。多个丝线中的第四对可以延伸到多个电极组件中的第四电极组件的远端孔中。第二电极组件可以在周向上邻近第三电极组件。第三电极组件可以在周向上邻近第四电极组件。当可扩张结构处于压缩状态时,多个电极组件可以在周向上嵌套。
第一绝缘层可以包括多个纵向上间隔的凹部。多个电极可以位于多个纵向间隔的凹部中。
第二绝缘层可以包括纵向通道。第二绝缘层可以包括多个纵向上间隔的凹部。多个电极可以位于多个纵向上间隔的凹部中。
第一绝缘层和第二绝缘层中的至少一个可以包括斜面(例如,圆形,锥形等)。第一绝缘层可以包括斜面。第二绝缘层可以包括斜面。
第一绝缘层和第二绝缘层中的至少一个具有在55D和63D之间的肖氏硬度。第一绝缘层和第二绝缘层的总厚度在0.004英寸(约0.1mm)和0.012英寸(约0.3mm)之间。
多个电极中的至少一个可以在第二绝缘层上方挺出。多个电极中的至少一个可以在第二绝缘层上方凹进。多个电极中的至少一个可以是平坦的。多个电极中的至少一个可以是圆顶状的。至少一个圆顶电极可以是中空的。至少一个圆顶电极可以是实心的。多个电极中的至少一个电极可以包括耦接到导体的第一突片。第一个突片可以竖直地偏移。
第一突片可以远离电极的有源表面竖直地偏移。第一突片的厚度可以在至少一个电极的厚度的1/4至3/4之间。第一突片可以包括远端突片。导体可以在与电极的有源表面相对的一侧上耦接到第一突片。
多个电极中的至少一个可以包括与第二绝缘层互锁的第二突片。第二突片可以包括孔。第二个突片可以竖直地偏移。多个电极中的至少一个可以是包括至少一个电极和绝缘体的电极子组件的一部分。至少一个电极可以由绝缘体制成。至少一个电极可以凹入绝缘体中。
多个电极组件中的每个可以包括远端突片。多个电极组件中的每个电极组件可以包括近端突片。
多个电极中的至少一个电极可以包括长圆形状,该长圆形状包括第一半圆形部分、第二半圆形部分以及纵向地位于第一半圆形部分和第二半圆形部分之间的矩形部分。矩形部分的长度与第一和第二半圆形部分的直径之比可以在1:3至3:1之间。多个电极中的至少一个可以包括椭圆形状。
多个电极可以在与可扩张结构的纵向轴线相交的平面的第一侧上。该系统可以进一步包括在该平面的第二侧上的不透射线标记。
在一些示例中,用于滤波器组件的壳体包括具有颜色编码和标签中的至少一个的多个电极垫。多个电极垫被配置为附接到具有相同颜色编码或相同标签中的至少一个的多个导联。
壳体可以进一步包括标记,以指示多个电极垫将在受试者上定位的位置。壳体可以进一步包括被配置为耦接到ECG导联的多个输入。壳体可以进一步包括被配置为耦接到多个ECG导联的连接器端口。壳体可以进一步包括多个一体式ECG导联。
在一些示例中,一种制造电极组件的方法包括:将多个电极定位在第一绝缘层和第二绝缘层之间,并且将第一绝缘层耦接到第二绝缘层。
第一绝缘层可以包括通道。多个导体中的一个导体可以从多个电极中的每个电极延伸穿过通道。多个电极中的每个电极可以包括突片。该方法可以包括将一个导体耦接到突片。突片可以包括远端突片。将一个导体耦接到突片可以包括将一个导体耦接到突片的与有源电极表面相对的一侧上。通道可以包括密封的远端。该方法可以包括阻塞通道的近端。该方法可以包括利用粘合剂填充通道。
在一些示例中,一种制造电极组件的方法包括:将导体耦接到电极的突片的第一侧,并且将该电极定位在第一绝缘层和第二绝缘层之间。第一绝缘层包括通道。导体延伸穿过通道。电极包括通过第二绝缘层暴露的第二侧。
突片可以在电极的远端侧。第一绝缘层可以包括电极凹部。定位电极可以包括将电极放置在凹部中。第二绝缘层可以包括电极凹部。定位电极可以包括将电极放置在凹部中。第一绝缘层可以包括与通道流体连通的管。该方法可以包括使导体延伸穿过管的近端部分。通道可以包括密封的远端。该方法可以包括闭塞通道的近端。该方法可以包括利用粘合剂填充通道。
以上概述且在以下进一步详细阐述的方法描述了实施人员将采用的某些行动作;然而,应该理解,它们还可以包括其他方进行这些动作的指示。因此,例如“定位电极”的动作包括“指示定位电极”。
为了概述本发明和可以获得的优点的目的,本文描述了某些对象和优点。不是所有这些对象或优点都必须根据任何特定示例获得。在一些示例中,本发明可以以下方式实施或实现:可以获得或者优化一个优点或一组优点,而不需要获得其他对象或优点。
本文中所公开的示例意图在本文公开的本发明的范围内。这些和其他示例将从以下参照附图的详细描述而显而易见,本发明并不限于任何特定公开的示例。参照一些示例描述的可选的和/或优选的特征可以与其他示例组合并包括在其他示例中。本文中引用的包括专利和专利申请的所有参照文献通过援引整体并入。
在一些实施方式中,用于支撑电极阵列的部分编织的可扩张构件(该可扩张构件在压缩状态和扩张状态之间自扩张)包括以下部分或基本上由以下部分组成:近端;远端;纵向轴线;远端部段;以及近端部段。远端部段包括多根丝线或替代地基本上由多根丝线组成。多根丝线中的每根丝线具有屈曲部,该屈曲部在该屈曲部的每一侧上包括丝线部段。屈曲部限定或至少部分地限定可扩张构件的远端。丝线部段从可扩张构件的远端朝着可扩张构件的近端编织。近端部段在远端部段的近侧。近端部段包括多根丝线。多根丝线平行于纵向轴线延伸。多根丝线中的一半丝线在可扩张构件的近端的远侧被截断,多根丝线中的另一半丝线限定可扩张构件的近端。多根丝线中的另一半丝线朝向纵向轴线弯曲以形成辐条,并且平行于纵向轴线弯曲以附接到细长构件。
远端部段可以包括具有编结特性的第一部分和具有不同于第一编结特性的第二编结特性的第二部分。第一编结特性可以包括编结角,并且第二编结特性可以包括编结角。第二编结角可以大于第一编结角。远端部段可以具有一致的编结角。近端部段中的多根丝线的端部部分可以平行于纵向轴线以并排对定位。该系统可以进一步包括覆盖每对并排丝线的至少一部分的聚合物管线。每对并排丝线的一个端部部分可以在可扩张构件的近端的远侧被截断。每对并排丝线的另一端部部分可以在近端毂系统的径向内侧延伸以形成辐条。辐条可以垂直于纵向轴线。
在一些实施方式中,导管系统包括被配置为插入受试者的脉管系统中的远端部分。远端部分可以包括部分编织的可扩张构件和多个电极组件。
多根丝线中的另一半丝线可以延伸到近端毂系统,近端毂系统可以包括以下部分或基本上由以下部分组成:外带;在外带的径向内侧的内带;和适配器,该适配器包括在外带的径向内侧的第一纵向部段和在内带的径向内侧的第二纵向部段。丝线的另一端部部分可以在内带的径向内侧。近端毂系统可以包括以下部分或基本上由以下部分组成:金属外带;在外带内侧的聚合物适配器;和金属内带。聚合物适配器可以包括远端部段和在聚合物适配器的远端部段近侧的近端部段。远端部段可以包括多个径向突起。多个径向突起中的成对的径向突起之间的通道可以被配置成接收多根丝线的另一半丝线中的一根丝线。聚合物适配器的近端部段可以没有径向突起。中心内腔可以延伸穿过聚合物适配器的远端部段和聚合物适配器的近端部段。金属内带可以在聚合物适配器的近端部段的周围并且在外带的内部。弧形空间可以位于聚合物适配器的内带和近端部段之间。弧形空间可以被配置成接收多根丝线中的另一半丝线。内带或外带中的至少一个可以是不透射线的。
该系统可以进一步包括外部护套和在外部护套径向内侧的内部构件。毂系统可以耦接到内部构件。外部护套可以被配置成将可扩张构件保持在压缩状态。可扩张构件可以被配置成在外部护套向内部构件向近侧相对纵向移动时从压缩状态朝向扩张状态扩张。可扩张构件可以被配置成在外部护套向内部构件向远端相对纵向移动时朝向压缩状态压缩。
内部构件可以包括细长管,该细长管包括:围绕内腔的侧壁;第一不透射线标记;位于第一不透射线标记远侧的第二不透射线标记;穿过侧壁的第一端口、第一端口邻近第一不透射线标记物;以及穿过侧壁的第二端口。第二端口可以在第一端口的远侧。第二端口可以邻近第二不透射线标记。第二端口可以与第一端口周向地间隔开。该系统可以包括与第一端口流体连通的第一压力传感器和与第二端口流体连通的第二压力传感器。
多个电极组件中的每一个可以包括第一绝缘层、第二绝缘层、在第一绝缘层和第二绝缘层之间的多个电极、以及在第一绝缘层和多个电极之间的多个导体。多个导体中的每个导体可以电连接到多个电极中的一个电极。第一绝缘层可以包括斜面。第二绝缘层可以包括斜面。第一绝缘层和第二绝缘层中的至少一个可以具有在55D和63D之间的肖氏硬度。第一绝缘层和第二绝缘层的总厚度可以在0.004英寸(约0.1mm)和0.012英寸(约0.3mm)之间。多个电极中的至少一个电极可以凹入第二绝缘层中。多个电极中的至少一个电极可以是平坦的。多个电极中的至少一个电极可以包括远端突片,该远端突片在与电极的有源表面相对的一侧上耦接至导体。多个电极中的至少一个电极可以包括长圆形状,该长圆形状包括第一半圆形部分、第二半圆形部分以及在纵向上位于第一半圆形部分和第二半圆形部分之间的矩形部分。矩形部分的长度与第一和第二半圆形部分的直径之比可以在1:3至3:1之间。
多个电极可以在与可扩张构件的纵向轴线相交的平面的第一侧上。该系统可以进一步包括在该平面的第二侧上的不透射线标记。
多个电极组件中的每一个可以包括:第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;耦接到第一绝缘层的第二绝缘层;以及在第一绝缘层和第二绝缘层之间的多个电极。第一绝缘层和第二绝缘层可以形成与管流体连通的通道。通道可以具有闭合的近端和/或闭合的远端。多个电极中的每个电极可以具有长圆形状。多个电极中的每个电极可以包括近端突片和/或远端突片。多个导体可以位于通道中。多个导体中的每个导体可以电连接到多个电极中的一个电极的远端突片的内侧。
当可扩张构件处于压缩状态时,多个电极组件可以周向嵌套。当可扩张构件处于压缩状态时,多个电极组件可以在纵向上交替地偏移。当可扩张构件处于压缩状态时,多个电极组件可以成形为平行四边形。
在一些实施方式中,用于支撑电极阵列的部分编织的可扩张构件(该可扩张构件在压缩状态和扩张状态之间自扩张)包括以下部分或基本上由以下部分组成:近端;远端;纵向轴线;远端部段;以及近端部段。远端部段包括多根丝线或替代地基本上由多根丝线组成。多根丝线中的每根丝线具有屈曲部,该屈曲部在该屈曲部的每一侧上包括丝线段。屈曲部限定或至少部分地限定可扩张构件的远端。丝线段从可扩张构件的远端朝着可扩张构件的近端编织。近端部段在远端部段的近侧。近端部段包括多根丝线。多根丝线平行于纵向轴线延伸。多根丝线中的至少一些丝线朝着纵向轴线弯曲以形成辐条并且平行于纵向轴线弯曲以附接到细长构件。
在一些实施方式中,用于支撑电极阵列的部分编织的可扩张构件(该可扩张构件在压缩状态和扩张状态之间自扩张)包括以下部分或基本上由以下部分组成:近端;远端;纵向轴线;远端部段;和近端部段。远端部段包括多根丝线或替代地基本上由多根丝线组成。多根丝线中的每根丝线具有屈曲部,该屈曲部在屈曲部的每一侧上包括丝线部段。屈曲部限定或至少部分地限定可扩张构件的远端。丝线部段从可扩张构件的远端朝着可扩张构件的近端编织。近端部段在远端部段的近侧。近端部段包括多根丝线。多根丝线平行于纵向轴线延伸。
在一些实施方式中,被配置为耦接至可扩张结构并施加电神经刺激的电极组件包括以下部分或基本上由以下部分组成:第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;第二绝缘层,该第二绝缘层耦接至第一绝缘层;以及在第一绝缘层和第二绝缘层之间的多个电极。第一绝缘层和第二绝缘层形成与管流体连通的通道。通道具有封闭的近端和封闭的远端。多个电极中的每个电极具有长圆形状。多个电极中的每个电极包括近端突片和远端突片。多个导体位于通道中。多个导体中的每个导体电连接到多个电极中的一个电极的远端突片的内侧。
第一绝缘层可以包括斜面。第二绝缘层可以包括斜面。第一绝缘层和第二绝缘层中的至少一个可以具有在55D和63D之间的肖氏硬度。第一绝缘层和第二绝缘层的总厚度可以在0.004英寸(约0.1mm)和0.012英寸(约0.3mm)之间。多个电极中的至少一个电极可以包括远端突片,该远端突片在与电极的有源表面相对的一侧上耦接至导体。
多个电极中的至少一个可以包括长圆形状,该长圆形状包括第一半圆形部分、第二半圆形部分以及纵向地位于第一半圆形部分和第二半圆形部分之间的矩形部分。矩形部分的长度与第一和第二半圆形部分的直径之比可以在1:3至3:1之间。
在一些实施方式中,被配置为耦接至可扩张结构并施加电神经刺激的电极组件包括以下部分或基本上由以下部分组成:第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;耦接至第一绝缘层的第二绝缘层;和位于第一绝缘层和第二绝缘层之间的多个电极。第一绝缘层和第二绝缘层形成与管流体连通的通道。通道具有封闭的近端和/或封闭的远端。多个电极中的每个电极具有长圆形状。多个电极中的每个电极包括近端突片和远端突片。多个导体位于通道中。多个导体中的每个导体电连接到多个电极中的一个电极的远端突片的内侧。
在一些实施方式中,被配置为耦接至可扩张结构并施加电神经刺激的电极组件包括以下部分或基本上由以下部分组成:第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;第二绝缘层,该第二绝缘层耦接至第一绝缘层;以及在第一绝缘层和第二绝缘层之间的多个电极。第一绝缘层和第二绝缘层形成与管流体连通的通道。多个导体位于通道中。多个导体中的每个导体电连接到多个电极中的一个电极。
在一些实施方式中,用于通过解剖学血管施加神经刺激的系统包括以下部分或基本上由以下部分组成:外部护套;位于外部护套中并且能够相对于外部护套移动的细长内部构件;耦接至内部构件的远端并且位于外护套中的可扩张构件;以及多个电极组件,多个电极组件在可扩张部件的外部并围绕可扩张部件在周向上间隔开。内腔具有远端。可扩张构件从在外部护套中的压缩状态自扩张到在外部护套之外的扩张状态。可扩张构件具有纵向轴线。该可扩张构件包括:远端部分,该远端部分包括多根编织在一起以形成多个单元的丝线;以及近端部分,该近端部分邻近该远端部分。近端部分包括平行于纵向轴线延伸的多根丝线。多个电极组件中的每个电极组件耦接至平行于纵向轴线延伸的两根所述丝线。多个电极组件中的每个电极组件包括背离可扩张构件的多个纵向间隔开的电极。
在一些实施方式中,用于通过解剖学血管施加神经刺激的系统包括以下部分或基本上由以下部分组成:外部护套;位于外部护套中并且能够相对于外部护套移动的细长内部构件;耦接至内部构件的远端的可扩张构件;以及围绕可扩张构件周向间隔开的多个电极组件。可扩张构件从在外部护套中的压缩状态自扩张到在外部护套之外的扩张状态。该可扩张构件包括:远端部分,其包括多根编织在一起以形成多个单元的线;以及近端部分,该近端部分在远端部分的近侧。近端部分包括平行于纵向轴线延伸的多根丝线。多个电极组件中的每个电极组件耦接至平行于纵向轴线延伸的所述丝线。多个电极组件中的每个电极组件包括多个电极。
在一些实施方式中,用于通过解剖学血管施加神经刺激的系统包括以下部分或基本上由以下部分组成:可扩张构件;和围绕可扩张构件在周向上间隔开的多个电极组件。可扩张构件包括:远端部分,该远端部分包括多根编织在一起以形成多个单元的丝线;以及近端部分,该近端部分包括多根平行于纵向轴线延伸的丝线。
在一些实施方式中,用于施加神经刺激的系统包括以下部分或基本上由以下部分组成:外部护套,位于外部护套中并且能够相对于外部护套移动的细长内部构件;耦接到内部构件的可扩张构件;以及多个电极组件,多个电极组件位于可扩张构件的外侧并且围绕可扩张构件在周向上间隔开。可扩张构件从在外部护套中的压缩状态自扩张到在外部护套之外的扩张状态。多个电极组件中的每个电极组件具有近端和远端。多个电极组件形成平行四边形形状,其中每个电极组件的近端在周向上相邻的电极组件的近端的远侧,并且其中每个电极组件的远端在周向上相邻的电极组件的远端的远侧。
在一些实施方式中,用于施加神经刺激的系统包括以下部分或基本上由以下部分组成:可扩张构件;和在可扩张构件的外部并且围绕可扩张构件在周向上间隔开的多个电极组件。多个电极组件中的每个电极组件具有近端和远端。多个电极组件形成平行四边形形状,其中每个电极组件的近端在周向上相邻的电极组件的近端的远侧,并且其中每个电极组件的远端在周向上相邻的电极组件的远端的远侧。
在一些实施方式中,用于施加神经刺激的系统包括以下部分或基本上由以下部分组成:可扩张构件;和位于可扩张构件外部并且围绕可扩张构件在周向上间隔开的多个电极组件。多个电极组件形成平行四边形形状。
在一些实施方式中,一种部署用于施加神经刺激的系统的方法,其中,该系统包括可扩张构件和位于可扩张构件的外部并且围绕可扩张构件在周向上间隔开的多个电极,并且其中多个电极组件形成包括最远端电极的平行四边形形状,该方法包括以下步骤或基本上由以下步骤组成:将最远端电极与右肺动脉的上面观(superior aspect)旋转对准;将最远端电极与气管隆突或气管左缘纵向对准;并且在旋转对准最远端电极之后,旋转可扩张构件。
在一些实施方式中,一种部署用于施加神经刺激的系统的方法,其中该系统包括可扩张构件和位于可扩张构件的外部并且围绕可扩张构件在周向上间隔开的多个电极组件,并且其中多个电极组件形成包括最远端电极的平行四边形形状,该方法包括以下步骤或基本上由以下步骤组成:将最远端电极与右肺动脉的上面观旋转对准;或者将最远端电极与气管隆突或气管的左边缘纵向对准。
在一些实施方式中,一种部署用于施加神经刺激的系统的方法,其中该系统包括可扩张构件和位于可扩张构件的外部并且围绕可扩张构件在周向上间隔开的多个电极组件,并且其中多个电极组件形成包括最远端电极的平行四边形形状,该方法包括以下步骤或基本上由以下步骤组成:将最远端电极与右肺动脉的上面观旋转对准。
在一些实施方式中,一种部署用于施加神经刺激的系统的方法,其中该系统包括可扩张构件和位于可扩张构件的外部并围绕可扩张构件在周向上间隔开的多个电极组件,并且其中多个电极组件形成包括最远端电极的平行四边形形状,该方法包括以下步骤或基本上由以下步骤组成:将最远端电极与气管隆突或气管的左边缘旋转地纵向对准。
在一些实施方式中,一种用于将多根细丝耦接至细长构件的毂系统包括以下部分或者基本上由以下部分组成:金属外带和位于该外带内侧的聚合物适配器。聚合物适配器包括具有多个径向突起的远端部段和在远端部段近侧的近端部段。近端部段没有径向突起。多个径向突起中的成对的径向突起之间的通道被配置成接收多根细丝中的细丝。中心内腔延伸穿过远端部段和近端部段。毂系统进一步包括围绕近端部段并且在外带内侧的金属内带。弧形空间位于内带和近端部段之间,并且被配置成接收多根细丝。内带或外带中的至少一个是不透射线的。
在一些实施方式中,一种用于将多根细丝耦接至细长构件的毂系统包括外带和在外带的内侧的适配器,或者基本上由外带和在外带的内侧的适配器组成。适配器包括具有多个径向突起的远端部段和在远端部段的近侧的近端部段。近端部段没有径向突起。多个径向突起中的成对的径向突起之间的通道被配置成接收多根细丝中的细丝。毂系统进一步包括围绕近端部段并且在外带的内部的内带。弧形空间位于内带和近端部段之间,并且被配置成接收多根细丝。
在一些实施方式中,一种用于将多根细丝耦接至细长构件的毂系统包括适配器或基本上由适配器组成,该适配器包括具有多个径向突起的远端部段和在远端部段的近侧的近端部段。近端部段没有径向突起。多个径向突起中的成对的径向突起之间的通道被配置成接收多根细丝中的细丝。毂系统进一步包括围绕近端部段并且在外带的内部的内带。在内带和近端部段之间具有空间,该空间被配置成接收多根细丝。
在一些实施方式中,一种用于将多根细丝耦接至细长构件的毂系统包括以下部分或基本上由以下部分组成:外带和位于外带的内侧的适配器。适配器包括具有多个径向突起的远端部段和在远端部段的近侧的近端部段。近端部段没有径向突起。多个径向突起中的成对的径向突起之间的通道被配置成接收多根细丝中的细丝。
在一些实施方式中,一种用于测量体腔的压力的导管包括以下部分或基本上由以下部分组成:外部护套;和位于外部护套中的内部构件,该内部构件能够相对于外部护套移动直到内部构件的一个部段位于外部护套之外为止。内部构件包括细长管,该细长管包括围绕内腔的侧壁、第一不透射线标记、在第一不透射线标记的远侧的第二不透射线标记、穿过侧壁的第一端口和穿过侧壁的第二端口。第一端口靠近第一不透射线标记。第二端口在第一端口的远侧。第二端口在第二不透射线标记的近侧。导管进一步包括与第一端口流体连通的第一压力传感器和与第二端口流体连通的第二压力传感器。
在一些实施方式中,一种用于测量体腔的压力的导管包括细长管或基本上由细长管组成,该细长管包括穿过侧壁的第一端口和穿过侧壁的第二端口。第二端口在第一端口的远侧。第二端口与第一端口在周向上间隔开。导管进一步包括与所述第一端口流体连通的第一压力传感器,以及与所述第二端口流体连通的第二压力传感器。
在一些实施方式中,一种用于被配置为影响ECG信号的滤波器组件的壳体包括以下部分或基本上由以下部分组成:配置为耦接到多条ECG导联的多个电极垫;和配置为耦接到ECG导联的多个ECG导联输入,ECG导联耦接到受试者上的电极垫。多个电极垫被颜色编码并用数字或字母标记中的至少一种标记。多个电极处于与受试者的胸部和外围的电极垫的位置相似的位置。多个电极垫可以包括至少十个电极垫。多个电极垫可以包括至少六个电极垫。多个电极垫可以包括至少四个电极垫。
附图说明
图1简略地示出了可以用于将电神经调节施加到受试者心脏中和周围的一个或多个神经的系统。
图2A简略地示出了心脏和周围区域。
图2B至2D是各个透视角度的心脏及周边区域的示意图。
图2E和2F是心脏和周围神经的示意图。
图2G和2H是脉管系统和电极矩阵的示意图。
图2I是心脏脉管系统和周围神经的示意图。
图2J是脉管系统和周围神经的示意图。
图2K是心脏和周围神经的另一示意图。
图2L示出了示例性刺激装置。
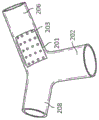
图3A是导管的示例的侧透视和局部横截面视图。
图3B是沿着图3A的线3B-3B观察到的图3A的导管的远端视图。
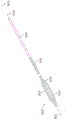
图4A是导管的另一示例的侧透视和局部横截面视图。
图4B是沿着图4A的线4B-4B观察到的图4A的导管的远端视图。
图4C是导管的一部分的示例的侧透视图。
图5和6示出了导管的示例。
图7A和7B示出了可以与根据本公开的导管一起使用的肺动脉导管的示例。
图8A和8B示出了导管的示例。
图8C示出了定位于主肺动脉内的图8A的导管。
图8D示出了定位于主肺动脉内的图8B的导管。
图9和10示出了导管的附加示例。
图11示出了导管系统的示例。
图12A至12D示出了导管的各种示例。
图13是定位于患者心脏中的导管的透视图。
图14A、14B、15A、15B、16和17示出了导管的示例。
图18A至18C是适于执行本公开的方法的示例性导管的侧局部横截面和透视图。
图18D示出了定位于心脏的右肺动脉中的图18A至18C的导管。
图19是定位于患者心脏中的示例性导管的局部横截面和透视图。
图20是适于执行本公开的方法的示例性第一导管和示例性第二导管的侧局部横截面和透视图。
图21示出了用于与本公开的导管或导管系统一起使用的刺激系统的示例。
图22A是导管的一部分的示例的透视图。
图22B是图22A的一部分的侧正视图。
图22C是图22A的一部分的远端视图。
图22D是图22A的一部分的近端视图。
图22E至22G是包括图22A的一部分的导管的示例的侧局部横截面视图。
图22H至22L是导管部署系统的示例的侧正视图和局部横截面视图。
图22M示出了图22A的一部分的示例性部件。
图23A是支柱的示例性部段的透视图。
图23B是支柱的示例的横向横截面视图。
图23C是支柱的示例的横向横截面视图。
图23D是支柱的另一示例的横向横截面视图。
图23E是支柱的又另一示例的横向横截面视图。
图23F是支柱的再另一示例的横向横截面视图。
图23G是支柱的示例性部段的俯视局部横截面视图。
图23H示出了支柱系统的示例。
图23I示出了其中第一支柱和第二支柱之间的距离小于第三支柱和第二支柱之间的距离的示例。
图23J示出了其中第一支柱和第二支柱之间的距离与第三支柱和第二支柱之间的距离大致相同的示例。
图23K示出了丝线系统上的电极的示例。
图23L是与血管壁间隔的电极的横截面视图。
图23M示出示例性电极矩阵。
图23Ni至23Nix示出了在基板上制造部件的示例性方法。
图24A示出了固定系统的示例。
图24B和24C示出了与导管相互作用的图24A的固定系统。
图25A是固定系统的另一示例的透视图。
图25B是图25A的固定系统的侧正视图。
图25C是图25A的固定系统的端视图。
图25D和25E示出了与导管相互作用的图25A的固定系统。
图25F示出了包括成形的内腔的导管的示例。
图25G至25J示出了从图25F的导管的内腔出来的示例部署。
图26A是导管系统2600的示例的侧正视图。
图26B至26H示出了部署图26A的导管系统2600的示例性方法。
图27A是固定系统的另一示例的透视图。
图27B是图27A的固定系统的一部分的正视图。
图27C至27F示出了在与组织接合后被缩回的图27A的固定系统。
图27G是固定系统的又另一示例的透视图。
图27H是图27G的固定系统的侧视图。
图27I是固定系统的再另一示例的侧视图。
图28A是固定系统的示例的侧视图。
图28B是图28A中的虚线圆圈28B的扩大视图。
图28C是图28A中的虚线方框28C的扩大视图。
图28D示出耦接到近端固定机构的不透射线标记的示例。
图28E示出近端固定机构中的孔的示例。
图28F是海波管(hypotube)切割图案的示例的展开视图(flattened view)。
图28G是图28F中的虚线方框28G的扩大视图。
图28H是图28G的支柱的侧视图。
图28I是径向向外屈曲的近端固定机构的侧视图。
图28J是径向向外屈曲的近端固定机构和在屈曲点屈曲的支柱的侧视图。
图28K是在屈曲点屈曲的支柱的侧视图。
图28L至28O示出在取回到导管期间向内旋转的近端固定机构。
图29A示出了导管系统的示例。
图29B至29F示出了部署图29A的导管系统的示例性方法。
图29G示出了导管系统的示例。
图29H示出了导管系统的另一示例。
图29I示出了导管系统的又另一示例。
图29J示出了导管系统的再另一示例。
图29K示出了导管系统的再又另一示例。
图29L至29N示出了部署图29K的导管系统的示例性方法。
图30A是电极系统的示例的透视图。
图30B是图30A的电极系统的一部分的俯视平面视图。
图30C是电极系统的另一示例的透视图。
图30D是处于塌缩状态的图30C的电极系统的远端视图。
图30E是处于扩张状态的图30C的电极系统的远端视图。
图30F是电极系统的又另一示例的平面视图。
图30G是图30F的电极系统的远端视图。
图31A和31B示出3×3矩阵中九个电极的示例性电极组合。
图31Ci至31Cxi示出了设置刺激向量的示例性方法。
图32A至32D示出3×4矩阵中十二个电极的示例性电极组合。
图33A是收缩性对刺激的绘图。
图33B是收缩性对刺激的另一绘图。
图34是可以用于实现占空比方法的示例性过程流程。
图35A简略地示出了机械地可重定位的电极导管系统。
图35B示出了在纵向推进之后的图35A的导管系统。
图35C示出了在纵向推进和旋转之后的图35A的导管系统。
图35D是沿着图35C的线35D-35D截取的横截面视图。
图36A是导管系统的示例的透视图。
图36B是处于塌缩状态的图36A的导管系统的一部分的透视图。
图36C是处于扩张状态的图36A的导管系统的一部分的侧视图。
图36D简略地示出了可扩张结构的示例的侧视图。
图36E简略地示出了可扩张结构的另一示例的侧视图。
图36F简略地示出了可扩张结构的再另一示例的侧视图。
图36G简略地示出了可扩张结构的又另一示例的透视图。
图36H简略地示出了可扩张结构图案的示例。
图36I简略地示出了可扩张结构图案的另一示例。
图36J简略地示出了可扩张结构图案的再另一示例。
图36K简略地示出了可扩张结构图案的再又另一示例。
图36L简略地示出了可扩张结构图案的又再另一示例。
图36M简略地示出了可扩张结构图案的另一示例。
图36N简略地示出了可扩张结构的示例。
图36O简略地示出了可扩张结构图案的示例。
图36P简略地示出了可扩张结构的示例的侧视图。
图36Q是图36P的可扩张结构的近端视图。
图37A是导管系统的示例的透视图。
图37B是可扩张结构的示例的侧视图。
图37C是图37B的可扩张结构的近端视图。
图37D是弯曲成形成样条对的丝线的透视图。
图37E是包括电极的样条对的透视图。
图37F是图37E的样条对的远端的扩大透视图。
图37Fi-37Fiii示出了电极的电移动的示例。
图37G是可扩张结构的近端毂的示例的透视图。
图37H简略地示出了图37G的近端毂的侧横截面视图。
图37I是图37G的近端毂的远端的透视图。
图37J简略地示出了可扩张结构的远端毂的示例的侧横截面视图。
图37K是图37A的导管系统的近端的示例的侧视图。
图37L是图37K的近端的侧横截面视图。
图37Li至37Liii示出操作手柄以径向扩张可扩张构件的示例性方法。
图37Li和37Liv示出操作手柄以径向扩张可扩张构件的另一示例性方法。
图37M是手柄基部的示例部件的侧横截面视图。
图37N是导管轴组件和支撑管的示例的近端的透视图。
图37O是导管轴组件的远端和可扩张结构的近端毂之间的示例性连接的侧横截面视图。
图37P是铰接件的示例的端部的透视图。
图37Q是处于解锁配置的导管系统的示例性手柄的透视图。
图37R简略地示出了沿着线37R-37R的图37Q的手柄的透视横截面视图。
图37S是锁定构件的示例的透视图。
图37T简略地示出了在图37R的圆圈37T的区域中的处于解锁配置的图37Q的手柄的扩大透视横截面视图。
图37U是处于锁定配置的图37Q的手柄的透视图。
图37V简略地示出了沿着线37V-37V的图37U的手柄的透视横截面视图。
图38A是导管系统的示例的透视图。
图38B是处于塌缩状态的图38A的导管系统的一部分的透视图。
图38C是处于扩张状态的图38A的导管系统的一部分的侧视图。
图38D是可扩张结构的局部侧横截面视图。
图38E是可扩张结构的局部侧横截面视图。
图39A是可扩张结构的示例的侧视图。
图39B是另一可扩张结构的示例的端视图。
图39C是再另一可扩张结构的示例的端视图。
图39D是再另一可扩张结构的示例的端视图。
图40A是用于导管系统的应变消除装置的示例的透视图。
图40B是用于导管系统的另一应变消除装置的示例的透视图。
图41A是导管系统的示例的透视图。
图41B是处于塌缩和紧缩状态的图41A的导管系统的一部分的透视图。
图41C是图41B的一部分的横向横截面侧视图。
图41D是处于紧缩状态的图41B的一部分的侧视图。
图41E是处于扩张状态的图41B的一部分的透视图。
图41F简略地示出了在脉管系统中扩张的可扩张结构。
图41G简略地示出了在脉管系统中扩张的可扩张结构的再另一示例。
图42A是电极结构的示例的侧视图。
图42B是电极结构的另一示例的侧视图。
图43A是电极的示例的侧视图。
图43B是电极的另一示例的侧视图。
图44A是电极的示例的侧视图。
图44B是电极的另一示例的侧视图。
图45是对接近血管壁的神经的神经刺激的图。
图46A是示出监测随着时间推移的左心室收缩性和右心室收缩性的图表。
图46B是示出监测随着时间推移的左心室收缩性和右心室收缩性的另一图表。
图47A简略地示出了示例性心电图。
图47B是经修改心电图的示例。
图47C是监测的心电图的示例。
图47D是经修改心电图的示例。
图47E是经修改心电图的另一示例。
图47F是经修改心电图的又另一示例。
图47G是经修改心电图的再另一示例。
图47Hi示意性地示出了用于从ECG中消隐神经刺激的示例系统。
图47Hii示意性地示出了修改ECG波形的示例方法。
图47Hiii示意性地示出了示例ECG波形,其不受施加神经刺激的破坏。
图47I示意性地示出了用于从ECG信号中滤除噪声的示例系统。
图47J示意性地示出了示例陷波滤波器。
图47Ki至47Kvii示意性地示出了从ECG信号中滤除噪声的示例效果。
图47L示意性地示出了用于使神经刺激频率与ECG监测频率匹配的示例系统。
图48A示出了将针插入到脉管系统中。
图48B示出了将导引器和导丝插入到脉管系统中。
图48C示出了定位于右肺动脉中的斯旺-甘兹氏导管和导丝。
图48D示出了在扩张状态下定位于右肺动脉中的示例性导管系统。
图48E示出了在进一步扩张状态下的图48D的导管系统。
图48F是插入到导引器中的导管系统的一部分的侧视图。
图48G是定位于右肺动脉中的导管系统的荧光检查图像。
图48H简略地示出了通过定位于右肺动脉中的导管系统的电极对目标神经的刺激。
图49A是处于扩张状态下的示例可扩张结构的透视图。
图49Ai是处于扩张状态下的示例可扩张结构的透视图。
图49Aii是处于扩张状态下的示例可扩张结构的透视图。
图49B是处于扩张状态下的示例可扩张结构的透视图。
图49C是处于扩张状态下的示例可扩张结构的透视图。
图49Ci是处于扩张状态下的示例可扩张结构的透视图。
图49Cii是处于扩张状态下的示例可扩张结构的透视图。
图49D是处于扩张状态下的示例可扩张结构的透视图。
图50A是处于扩张状态下的示例可扩张结构的透视图。
图50B是处于扩张状态下的示例可扩张结构的透视图。
图50C是处于扩张状态下的示例可扩张结构的透视图。
图51A是处于扩张状态下的示例可扩张结构的透视图。
图51B是处于塌缩状态下的示例可扩张结构的透视图。
图51C是处于扩张状态下的示例可扩张结构的透视图。
图51D是用于容纳处于塌缩状态下的可扩张结构的示例导管的截面图。
图51Ei至51Ev示出了取回可扩张结构的示例方法。
图51Fi是处于扩张状态下的示例可扩张结构的透视图。
图51Fii是图51Fi的示例可扩张结构的侧视图。
图52Ai是处于扩张状态下的示例可扩张结构的透视图。
图52Aii是处于扩张状态下的图52Ai的可扩张结构的侧视图。
图52Aiii是处于扩张状态下的图52Ai的可扩张结构的端视图。
图52Aiv示出了位于右肺动脉中的图52Ai的可扩张结构。
图52Bi是处于扩张状态下的示例可扩张结构的透视图。
图52Bii是处于扩张状态下的图52Bi的可扩张结构的端视图。
图52Ci是处于扩张状态下的示例可扩张结构的透视图。
图52Cii是处于扩张状态下的图52Ci的可扩张结构的侧视图。
图52Ciii示出了位于右肺动脉中的图52Ci的可扩张结构。
图52Di是处于扩张状态下的示例可扩张结构的透视图。
图52Dii是处于扩张状态下的图52Di的可扩张结构的侧视图。
图52Diii是处于扩张状态下的图52Di的可扩张结构的端视图。
图52E是处于扩张和前进状态下的示例可扩张结构的透视图。
图52Fi和52Fii示出了使用图52E的可扩张结构的示例方法。
图52Gi是处于塌缩状态下的示例可扩张结构的透视图。
图52Gii是处于扩张状态下的图52Fii的示例可扩张结构的透视图。
图52Giii至52Gv示出了使用图52Gi的可扩张结构的示例方法。
图52Gvi示出了使用包括电极样条的可扩张结构5260的形式的示例方法。
图53A是示例电极组件的透视图。
图53B是图53A的圆53B中的电极区域在3560倍放大率下的扫描电子显微镜图像。
图53Ci至53Ciii-2示意性地示出了制造诸如图53A的电极组件的电极组件的示例方法。
图53Di和53Dii示意性地示出了制造诸如图53A的电极组件的示例电极组件的另一示例方法。
图53Ei示意性地示出了诸如图53A的电极组件的另一示例电极组件。
图53Eii示意性地示出了诸如图53A的电极组件的另一示例电极组件。
图53F是示例电极的外部透视图。
图53G是图53F的示例电极的内部透视图。
图54A是具有示例导管系统的心脏的示意图,该导管系统包括部署在右肺动脉中的可扩张结构。
图54B是示例压力传感器的透视图。
图54C是示出了用于监测导管移动的压力传感器的示例用途的图。
图54Di和54Dii示出了用于检测导管的移动的示例方法和系统。
图54E以单个图示出了用于检测导管的移动的示例方法和系统。
图55是示例刺激系统的前视图。
图56A示出了示例用户界面的屏幕。
图56B示出了图56A的示例用户界面的另一屏幕。
图57A是导管系统的示例的透视图。
图57B是处于扩张状态下的图57A的导管系统的示例可扩张结构的侧视图。
图57C是在没有电极组件的情况下处于扩张状态的图42B的可扩张结构的侧视图。
图57Di是图57B的示例可扩张结构的端视图。
图57Dii是另一示例可扩张结构的端视图。
图57E是图57B的示例可扩张结构的示例毂系统的近端和侧向透视图。
图57F是图57E的示例毂系统的远端视图。
图57G是图57B的可扩张结构的一部分和图57E的示例毂系统的一部分的近端和侧向透视图。
图57H是图57B的可扩张结构的一部分和图57E的示例毂系统的一部分的侧视图。
图57I是从毂系统的内带的侧向截取的图57E的示例轮毂系统的截面图。
图57J是图57E的示例毂系统的分解近端和侧向透视图。
图57K是图57B的示例可扩张结构的示例电极组件的俯视平面图。
图57L是图57K的示例电极组件的部分透明的远端和俯视透视图。
图57M是沿着图57L的线57M-57M截取的图57K的示例电极组件的截面图。
图57N是图57K的示例电极组件的局部剖开的近端和俯视透视图。
图57O是图57K的示例电极组件的仰视透视图。
图58A是图57K的示例电极组件的示例电极的俯视和侧向透视图。
图58B是图58A的示例电极的俯视平面图。
图58C是图58A的示例电极的侧视图。
图58Ci示出了电极的另一示例。
图58D是沿着图58B的线58D-58D截取的图58A的示例电极的截面图。
图58E是图57K的示例电极组件的另一示例电极的截面图。
图58Fi至58Fiv是图57K的示例电极组件的其他示例性电极的侧视图。
图58G是图57K的示例电极组件的示例电极子组件的俯视和侧向透视图。
图58Hi至58Hiii是图57K的示例电极组件的其他示例电极子组件的侧向截面图。
图59A是图57A的示例导管系统的示例内部构件的部段的侧视图。
图59B是图59A的示例内部构件的一部分的透视图。
图59C是图59A的示例内部构件的另一部分的透视图。
图60A是图57A的示例导管系统的远端部分的一部分的透视图。
图60Bi是鼻部的另一示例的远端和侧向透视图。
图60Bii是图60Bi的鼻部的远端视图。
图60Biii是包括图60Bi的鼻部的系统的示例远端的透视图。
图60Biv是包括图60Bi的鼻部的系统的示例远端的远端和侧向透视图。
图61A是图57B的示例可扩张结构的另一示例电极组件的仰视和近端透视图。
图61B是图61A的示例电极组件的仰视和远端透视图。
图61Ci是另一示例电极组件的俯视、侧视和近端透视图。
图61Cii是图61Ci的示例电极组件的后视、侧视和近端透视图。
图61Ciii是图61Ci的示例电极组件的示例上绝缘体和示例电极的仰视平面图。
图61Civ是耦接至示例可扩张结构的图61Ci的多个示例电极组件的侧视图。
图61Cv是处于示例对准用于耦接到可扩张结构的图61Ci的多个示例电极组件的仰视平面图。
图61Di是示例电极的俯视平面图。
图61Dii是另一示例电极的俯视平面图。
图61Ei是又一示例电极组件的俯视、侧视和近端透视图。
图61Eii是图61Ei的示例电极组件的后视、侧视和远端透视图。
图61Eiii是图61Ei的示例电极组件的俯视、侧视和远端透视分解图。
图61Eiv是图61Ei的电极组件的示例上绝缘体的俯视和侧向纵剖视图。
图61Ev是图61Eiv的示例上绝缘体的放大的俯视和侧向纵剖视图。
图61Evi是图61Ei的电极组件的示例下绝缘体的俯视和侧向纵剖视图。
图61Evii是图61Ei的电极组件的俯视和远端纵向截面图。
图61Eviii是图61Ei的电极组件的放大的俯视和远端纵向截面图。
图61Eix是耦接至示例可扩张结构的图61Ei的多个示例电极组件的近端透视图。
图61Ex示出了位于血管中的图61Eix的可扩张结构和多个示例电极组件。
图61Fi是相对于可扩张结构尺寸过小的血管和/或相对于血管尺寸过大的可扩张结构的示例的示意性侧视图。
图61Fii是相对于可扩张结构尺寸过小的血管和/或相对于血管尺寸过大的可扩张结构的示例的另一示意性侧视图。
图61Gi至61Giv示出了上部和下绝缘体的示意性侧视图或截面图。
图62A示出了用于滤波器组件的示例壳体。
图62B示出了用于滤波器组件的另一示例壳体。
具体实施方式
本公开的若干示例提供了能够用于将电神经调节施加到受试者(例如患者)的心脏中或周围的一个或多个神经的方法和系统。例如,若干示例可以有用于对具有心血管医学症状的患者(例如,具有急性或慢性心脏疾病的患者)的电神经调节。如本文中所讨论,若干示例允许导管的一部分定位于患者的脉管系统内,在右肺动脉、左肺动脉和肺动脉干中的至少一个中。一旦被定位,导管的电极系统就可以提供电能量(例如,电流或电脉冲)来刺激肺动脉周围(例如,接近肺动脉)的自主神经系统,以便给患者提供辅助心脏治疗。感测的心脏活动特性(例如,非电心脏活动特性)可以用作进行以下基础:调整通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的一个或多个特性,以便给患者提供辅助心脏治疗。
示出相似物件的附图的某些群组遵从编号惯例,其中第一数字或前几个数字对应于附图图号,剩余数字识别附图中的元件或部件。在这样的附图群组之间的相似的元件或部件可以通过使用相似的数字识别。例如,336可以表示图3A中的元件“36”,并且相似的元件“36”可以在图4A中表示为436。如将理解的,可以增加、交换和/或删除本文各个示例中所示的元件,以便提供本公开的任何数量的附加示例。关于先前附图所描述的部件或特征可以不关于后续附图进行详细描述;但是,在后续附图中示出的示例可以包括先前示例的部件或特征的部件或组合中的任一个。
术语“远端(distal)”和“近端(proximal)”在本文中针对沿着本公开的装置采用的相对于治疗临床医生的位置或方向来使用。“远端”或“向远端(distally)”是沿着导管采用的远隔临床医生的位置或者沿着导管采用的在远离临床医生的方向上的位置。“近端”和“近端地(proximally)”是沿着导管采用的临床医生附近的位置或沿着导管采用的在朝向临床医生的方向上的位置。
本公开的导管和电极系统可以用于治疗具有各种的心脏状况的患者。这样的心脏状况包括但不限于尤其是急性心力衰竭。本公开的若干示例提供了方法,其可以用于通过调节肺动脉(例如,右肺动脉、左肺动脉、肺动脉干)周围的自主神经系统以便给患者提供辅助心脏治疗来治疗急性心力衰竭,也被称为失代偿性心力衰竭。神经调节治疗可以通过影响心脏收缩性和/或松弛性、在一些示例中超过心率来提供帮助。自主神经系统可以被调节,以共同地影响心脏收缩性和/或松弛性,在一些示例中超过心率。可以通过电调节影响自主神经系统,该电调节包括刺激和/或抑制自主神经系统的神经纤维。
如本文所述,存在于导管上的一个或多个电极可以定位在主肺动脉和/或右和左肺动脉中的一个或两个内。根据若干示例,一个或多个电极定位成接触主肺动脉和/或右肺动脉或左肺动脉的腔面(例如,与主肺动脉的后部表面物理接触)。如本文将讨论的,本文提供的导管和/或导管系统上的一个或多个电极可用于在电极和/或参考电极之间提供电能脉冲。本公开的电极可以用于单极、双极和/或多极配置中的任一个中。一旦被定位,本公开的导管和导管系统就可提供电刺激能量(例如,电流或电脉冲)以刺激主肺动脉和/或肺动脉的一个或两个周围的自主神经纤维,以便给患者提供辅助心脏治疗。
在一些示例中,可以根据本文所描述的方法,使用除了血管内导管之外的系统。例如,在开心手术期间或者不经由脉管系统导入的情况下植入电极、传感器等。
如本文中将更加充分讨论的若干示例可以允许对患者的心脏电神经调节,包括通过定位于患者心脏的肺动脉中的导管传送一个或多个电脉冲、从定位于心脏的脉管系统中的第一位置处的至少第一传感器感测响应于一个或多个电脉冲的一个或多个心脏活动特性(例如,非电心脏活动特性)以及响应于一个或多个心脏活动特性调整通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的特性,以便于给患者提供辅助心脏治疗。
导管可以包括多个电极,该多个电极可选地插入到肺动脉干中,并且定位成使得电极优选地与肺动脉的后表面、上表面和/或下表面接触。从这样的位置,电脉冲可以传送到电极或者从电极传送出,以选择性地调节心脏的自主神经系统。例如,电脉冲可以传送到电极中的一个或多个或者从电极中的一个或多个传送出,以选择性地调节自主神经系统的自主心肺神经,其可以调节心脏收缩性和/或松弛性在一些示例中超过心率。优选地,多个电极定位于沿着肺动脉(例如,右肺动脉或左肺动脉)的后壁和/或上壁的部位处。从肺动脉中的这样的位置,可以通过电极传送一个或多个电脉冲,并且一个或多个心脏活动特性(例如,非电心脏活动特性)可以被感测。至少部分地基于感测的心脏活动特性,可以调整传送到或传送出定位于心脏的肺动脉中的电极的一个或多个电脉冲的特性,以便积极地影响心脏收缩性和/或松弛性,同时降低或最小化对于心率和/或氧消耗的影响。在某些示例中,对心脏收缩性的影响是为了增加心脏收缩性。在某些示例中,对心脏松弛性的影响是为了增加心脏松弛性。
图1简略地示出了可以用于将电神经调节施加到受试者心脏中和周围的组织(例如,其包括一个或多个神经)的系统100。系统100包括第一部件102和第二部件104。第一部件102可以定位于肺动脉(例如,在图1中示出为右肺动脉,左肺动脉和/或肺动脉干)中。第一部件102可以经由微创、经皮、透皮程序而定位于血管内,例如从远离位置(例如,颈静脉(例如,如图1所示,颈内静脉)、轴向锁骨下静脉、股静脉或其他血管)传送通过脉管系统。这样的方法可以通过丝线(over-the-wire),使用斯旺-甘兹氏浮动导管,其组合等。在一些示例中,例如在常规手术(例如,开心手术)、放置另一装置(例如,冠状动脉旁路、起搏器、除颤器等)或作为独立程序期间可以创伤性地定位第一部件。如本文进一步详细地描述的,第一部件包括神经调节器(例如,电极、换能器、药物、消融装置、超声、微波、激光、低温、其组合等),并且可以可选地包括支架或框架、锚固系统和/或其他部件。第一部件102可以急性地被定位在肺动脉中24至72小时。在一些示例中,第一部件102对心丛内的终末分支神经调节,这可以增加左心室收缩性和/或松弛性。左心室收缩性和/或松弛性的增加可以不伴随心率的增加,或者可以比心率的增加更多(例如,基于百分比变化)。在一些示例中,第一部件102在调节组织(例如神经)之外或替代调节组织(例如神经)可以适于消融组织,包括神经。
第一部件102电耦接到第二部件104(例如,如图1所示,经由通过导管传送的电线或导电元件和/或无线地)。第二部件104可以定位在体外(例如,如图1所示,用带捆绑到受试者手臂,用带捆绑到受试者的另一部分(例如,腿、颈、胸)、放置在床头柜上等)。在一些示例中,第二部件104可以临时植入受试者中(例如,植入血管中、另一体腔中、胸腔中等)。第二部件104包括配置为操作第一部件102中的电极的电子器件(例如脉冲发生器)。第二部件104可以包括电源或可以从外部源(例如,壁上插座、单独的电池等)接收电力。第二部件104可以包括配置为接收传感器数据的电子器件。
系统100可以包括传感器。传感器可以定位在肺动脉(例如,右肺动脉、左肺动脉和/或肺动脉干),心房(例如,左和/或右),心室(例如,左和/或右),腔静脉(例如,上腔静脉和/或下腔静脉)和/或其他心血管位置中的一个或多个中。传感器可以是第一部件102的一部分,导管的一部分,和/或与第一部件102分离(例如,心电图胸部监测器,脉搏血氧计等)。传感器可以与第二部件104通信(例如,有线和/或无线)。第二部件104可以基于来自传感器的信息启动、调整、校准、终止神经调节或对神经调节进行其他动作。
系统100可以包括“一体化(all-in-one)”系统,其中第一部件102与目标导管成一体或整体。例如,第一部件102可以是插入到颈内静脉、轴向锁骨下静脉、股静脉等中并且引导到目标位置(例如肺动脉)的导管的一部分。然后可以从导管部署第一部件102。这样的系统可以减少用于定位第一部件102的程序步骤和导管交换的数量和/或复杂度。例如,导丝的长度可以是目标导管长度的两倍,其在无菌区中可能难以进行控制。因为重定位系统已经就位,所以这样的系统可以使得在初始部署之后较容易重新定位第一部件102。
系统100可以包括伸缩(telescoping)和/或通过丝线的系统,在这样的系统中第一部件102不同于目标导管。例如,目标导管(例如,斯旺-甘兹氏导管)可以是插入到颈内静脉、轴向锁骨下静脉、股静脉等中并且引导到目标位置(例如肺动脉)(例如,通过浮动)。导丝可以通过到目标位置的目标导管插入到近端毂(例如,具有退出目标导管远端的最硬部分),并且作为不同于目标导管的单独的导管的一部分的第一部件102可以通过导丝或使用伸缩系统(例如其他导丝、引导导管等)被跟踪到目标位置。然后可以从单独的导管部署第一部件102。介入心脏病学家知道这样的系统使得多次交换没有什么问题。这样的系统可以允许某些特定功能的定制。这样的系统可以减小总体导管直径,这可以增加可跟踪性和/或允许添加附加特征,例如因为不是所有功能都被集成到一个导管中。这样的系统可以允许使用多个导管(例如,移除第一单独导管并且定位第二单独单管而不必重定位整个系统)。例如,根据需要可以定位和移除具有不同类型传感器的导管。系统100可以在没有斯旺-甘兹氏末端的情况下可转向(例如,包括可转向导管)。一些系统100可以与一个或多个所描述类型的系统(例如,具有用于斯旺-甘兹氏浮动的可选可膨胀球囊的可转向导管,可以通过导丝和/或通过导管伸缩的可转向导管等)相容。
图2A简略地示出了心脏200和周围区域。主肺动脉或肺动脉干202始于右心室204的出口。在成人中,肺动脉干202是具有约3厘米(cm)(约1.2英寸(in))的直径和约5cm(约2.0in)的长度的管状结构。主肺动脉202分支成左肺动脉208和右肺动脉206,左肺动脉208和右肺动脉206将缺氧血递送到相应的肺。如图2A所示,主肺动脉202具有在左心房212上方拱起并且邻近肺静脉213的后表面210。如本文所述,神经刺激器可以至少部分地被定位在肺动脉202,206,208中,例如其中神经刺激器与后表面210接触。在一些示例中,用于定位神经刺激器的优选位置是右肺动脉204。将PCT专利申请No.PCT/US2015/047780和美国临时专利申请No.62/047,313通过引用整体并入本文,更特别地,将在其中公开的定位在右肺动脉中的描述通过引用并入本文。在一些示例中,用于定位神经刺激器的优选位置与肺动脉202,206,208的后表面210接触。从这样的位置,从电极传送的刺激电能量例如可以更好地能够对经历各种心血管医学症状(例如,急性心力衰竭)的受试者进行治疗和/或提供治疗(包括辅助治疗)。神经刺激器在肺动脉202,206,208中的其他位置也是可能的。
第一部件102(图1)可以定位在受试者的肺动脉202,206,208中,其中第一部件102的神经刺激器与肺动脉202,206,208的腔面接触(例如,与肺动脉202,206,208的后部部分210的表面物理接触或贴近)。第一部件102的神经刺激器可以用于将刺激传送到肺动脉202,206,208周围的自主心肺纤维。刺激电能量可以从自主神经系统引起反应,这可以帮助调节受试者的心脏收缩性和/或松弛性。刺激可以影响收缩性和/或松弛性超过心率,这可以改善血流动力学控制同时可以减少不希望的系统性效应。
在一些示例中,本文描述的对目标神经或组织的神经调节可以用于治疗心律失常、心房纤颤或扑动、糖尿病、进食障碍、内分泌疾病、遗传代谢综合症、高血糖症(包括抗葡萄糖性)、高脂血症、高血压、炎症性疾病、抗胰岛素性、代谢疾病、肥胖症、室性心动过速、影响心脏的症状和/或其组合。
图2B至2D是各个透视角度的心脏200及周边区域的示意图。包括肺动脉干202的一部分的心脏200的一些部分(例如,其他结构之外特别是主动脉、上腔静脉)已经被去除,以允许本文中讨论的细节被示出。图2B提供了从受试者或患者的前方看到(从前向后方向观看)的心脏200的透视图,而图2C提供了从受试者的右侧看到的心脏200的透视图。如所示,心脏100包括从右心室104的基部开始的肺动脉干102。在成人中,肺动脉干102是直径大约3厘米(cm)且长度5cm的管状结构。肺动脉干202在分支点或分叉207处分支成左肺动脉206和右肺动脉208。左肺动脉106和右肺动脉108用于将缺氧血传送到每个对应的肺。
分支点207包括从肺动脉干202的后部延伸的脊部209。如所示,分支点207和脊部209一起提供了“Y”或“T”形结构,其帮助限定左肺动脉208和右肺动脉206的至少一部分。例如,从脊部209,肺动脉干202的分支点207在相反方向上倾斜。在第一方向,肺动脉干202转到左肺动脉208,在与第一方向相反的第二方向,肺动脉干202转到右肺动脉206。分支点207可以不需要沿着肺动脉干202的纵向中心线214对齐。
如图2B中所示,肺动脉干202的一些部分可以用右侧向平面216和与右侧向平面216平行的左侧向平面220限定,右侧向平面216沿着肺动脉干202的右腔面218穿过,其中左侧向平面220沿着肺动脉干202的左腔面222穿过。右侧向平面216和左侧向平面220在后侧方向224和前侧方向226上延伸。如所示,分支点207的脊部209位于右侧向平面216和左侧向平面220之间。分支点207定位于右侧向平面216和左侧向平面220之间,其中分支点207能够帮助至少部分地限定心脏200的左肺动脉208和右肺动脉206的开始。右侧向平面216和左侧向平面220之间的距离大约是肺动脉干202的直径(例如,约3cm)。
如本文中所讨论,本公开包括用于对受试者或患者的心脏200神经调节的方法。例如,如本文中所讨论,定位于肺动脉202中的导管可以用于将一个或多个电脉冲传送到心脏200。例如本文中所讨论的,定位于心脏200的脉管系统内的第一位置处的第一传感器感测响应于神经刺激的心脏活动特性。可以响应于感测的心脏活动特性来调整神经刺激器的特性,以便给患者提供辅助心脏治疗。
图2D提供了右肺动脉206的后表面221、上表面223和下表面225的附加视图。如所示,图2D中的心脏200的视图是从心脏200的右侧。如所示,后表面221、上表面223和下表面225占右肺动脉206的腔周界的大约四分之三,其中前表面227占了剩余部分。在一些实现方式中,神经刺激装置的电极可以邻近前表面227定位。神经刺激装置的电极可以跨越圆周的一部分,且该部分可以跨越(例如,仅跨越)或被配置成跨越例如前表面227和/或上表面223。电极可以覆盖或跨越装置和/或动脉的圆周(例如,前表面227和/或上表面223)的约10%至约50%之间(例如,约10%、约15%、约20%、约25%、约30%、约35%、约40%、约45%、约50%、在这些值之间的范围等)。电极可以覆盖或跨越装置和/或动脉的圆周(例如,前表面227和/或上表面223)的约10mm与约40mm之间(例如,约10mm、约15mm、约20mm、约25mm、约30mm、约35mm、约40mm、在这些值之间的范围等)。在某些这样的实施方案中,神经刺激装置的电极也可以或替代地被邻近上表面223定位。图2D还示出了主动脉230、肺静脉213、上腔静脉(SVC)232以及下腔静脉(IVC)234。
图2E和2F是心脏200和周围神经的示意图。心血管系统丰富地分布有自主纤维神经。交感神经纤维发源于星状和胸交感神经节,并且负责增加心脏的变时性(心率)、松弛性(放松)和变力性(收缩性)状态。人尸体解剖学研究显示,负责心室的松弛性和变力性状态的纤维沿着右肺动脉206和肺动脉干202的后表面穿过。图2E示出了右背内侧腓总神经(CPN)240、右背侧向CPN 242、右星状CPN 244、右迷走神经(vagal nerve)或迷走神经(vagus)246、右颅内迷走神经CPN 248、右尾侧迷走神经CPN 250、右冠状心神经252、左冠状心神经254、左侧向心神经256、左喉返神经258、左迷走神经(vagal nerve)或迷走神经(vagus)260、左星状CPN 262、左背侧侧向CPN 264和左背内侧CPN 266的近似位置。心脏200周围(例如,在附近)的这些和/或其他神经可以成为由本文描述的系统和方法进行神经刺激的目标。在一些示例中,右背内侧腓总神经240、右星状CPN 244和左侧向心神经256中的至少一个成为进行神经调节的目标和/或被影响以进行神经调节,但是图2E所示或没有示出的其他神经也可以成为目标和/或被影响。
图2E和2F还简略地示出了气管241。如在图2F中最佳地可见,气管241分叉成右肺动脉支气管243和左肺动脉支气管241。气管241的分叉可以被视为沿着平面245。平面245沿着右肺动脉206。肺动脉的分叉可以被视为沿着平面247,平面247与平面245间隔间隙249。间隙249横跨右肺动脉206。大量心神经沿着由圈出区域251示意的间隙249越过右肺动脉206,并且这些神经可以有利地成为本文描述的系统和方法中的一些的目标。在某些这样的示例中,气管241的分叉和/或肺动脉202的分叉可以提供用于系统和/或部件定位的界标。刺激电极可以与气管241间隔,例如以减少咳嗽和其他可能的呼吸系统副作用。在一些示例中,刺激电极与气管241或平面245间隔约2mm至约8mm之间(例如,约2mm、约3mm、约4mm、约5mm、约6mm、约7mm、约8mm、这样的值之间的范围等)。在一些示例中,刺激电极与气管241或平面245间隔约10%至约100%之间的右肺动脉206的长度的某百分比(例如,约10%、约25%、约30%、约35%、约40%、约45%、约50%、约55%、约75%、约100%、这样的值之间的范围等)。
图2G和2H是脉管系统和电极矩阵201的示意图。电极矩阵201的大部分定位在右肺动脉206中,但是电极矩阵201中的一些可以被考虑为定位在肺动脉干202中。所述电极阵列被示出为电极203的4×5矩阵。如本文进一步详细地描述的,电极203可以定位在样条上、定位在与样条耦接的膜或网格上等。例如,四条样条可以每条样条包含五个电极203。在一些示例中,电极203包括具有可控极性的双极电极,允许电极矩阵201的可配置性。在一些示例中,电极203的边缘到边缘的间距在约3mm至约7mm之间(例如,约3mm、约4mm、约5mm、约6mm、约7mm、这样的值之间的范围等)。在一些示例中,电极203具有约0.5mm2至约5mm2之间的表面面积(例如,约0.5mm2、约1mm2、约1.5mm2、约2mm2、约2.5mm2、约3mm2、约3.5mm2、约4mm2、约4.5mm2、约5mm2、这样的值之间的范围等)。电极203大致纵向和周向对齐,但是偏移的电极203也是可以的。由电极阵列201提供的对右肺动脉的覆盖纵向上在约25mm至约35mm之间(例如,约25mm、约28mm、约31mm、约35mm、这样的值之间的范围等),并且周向上在约80°至约120°之间(例如,约80°、约90°、约100°、约110°、约120°、这样的值之间的范围等)。电极阵列201可以覆盖例如血管圆周的约25%至约50%之间(例如,约25%、约30%、约35%、约40%、约45%、约50%、这样的值之间的范围等)。在一些示例中,电极阵列201包括3×3矩阵、3×4矩阵、3×5矩阵、4×4矩阵、4×5矩阵或5×5矩阵。较大的矩阵可以更有可能通过电极203的至少一个组合来捕获目标神经,而较小的矩阵可以较为容易递送到目标部位。再次参照图2D,在一些实施方案中,具有本文描述的特征的电极阵列可以邻近前表面227定位。在某些这样的实施方案中,电极阵列也可以或者替代地邻近上表面223定位。
图2I是心脏脉管系统和周围神经的示意图。与图2G和2H类似,图2I示出肺动脉干202、右肺动脉206和左肺动脉208。图2I还示出了室间沟神经215,217沿着右肺动脉206和肺动脉干202的近似越过位置的迹线。对神经215,217中的一个或两个的刺激可以增加收缩性和/或松弛性,例如超过心率或不影响心率。电极矩阵201(包括电极203a、203b、203c、203d、203e、203f等)在图2G和2H的近似位置中以虚影示出。
在一些示例中,可以选择特定电极将一个或多个神经作为目标或捕获一个或多个神经。电极203a,203b可以用于例如以大致横向的方式将神经215作为目标。电极203a,203c可以用于例如以大致平行的方式将神经215作为目标。电极203c,203d可以用于例如以大致横向的方式将神经215以及神经217作为目标。电极203e,203f可以用于例如以大致混合的横向-平行的方式将神经217作为目标。在一些示例中,可以以双极方式使用两个电极,其中两个电极中的一个为正极而两个电极中的另一个为负极。在一些示例中,可以使用两个以上电极,其中两个或更多个电极为正极并且两个或更多个电极为负极。
如本文进一步详细地描述的,在放置电极阵列之后,可以激励电极组合以测试其效果。一些组合可能产生更好结果但是更有可能导致副作用,一些组合可能产生更好结果但是可能较不能重复,一些组合可能影响一个神经但不影响多个神经等。在一些示例中,可以并行地或串行地使用多个电极组合或独立输出。例如,电极203a,203b可以用于将神经215作为目标持续第一持续时间,并且电极203e,203f可以用于将神经217作为目标持续第二持续时间。第二持续时间可以至少部分地重叠第一持续时间、完全重叠第一持续时间(例如,在相同时间开始、在相同时间结束、在第一持续时间开始后开始、在第一持续时间结束之前结束以及其组合)或可以与第一持续时间在时间上间隔第三持续时间。第三持续时间可以为零(例如,当第一持续时间结束时第二持续时间开始)。
在多个尸体的研究中,右肺动脉206接近分支点207的平均直径206d为约26.5mm,具有约4.6mm的标准偏差。假定圆形血管,右肺动脉206接近分支点207的平均周长约为83mm。如果目标是圆周的30%覆盖,则电极矩阵应当具有约25mm(83mm×30%)的周向长度。可以基于其他尺寸(例如,在其他点的血管直径、测量的血管直径、其他血管的直径、血管长度等)、目标覆盖百分比、神经位置可变性、放置准确性、刺激参数等来估计或计算其他电极矩阵尺寸。
图2J是脉管系统和周围神经的示意图。如上所述,上腔静脉232将血液供应至心脏的右心房。向上腔静脉232供应血液的血管包括右无名静脉或右头臂静脉253和左无名静脉或左头臂静脉255。向右头臂静脉253供应血液的血管包括右锁骨下静脉257和右颈内静脉259。向左头臂静脉255供应血液的血管包括左锁骨下静脉261和左颈内静脉263。甲状腺下静脉265还向上腔静脉232供应血液。尽管在图2F中所示的脉管系统周围存在其他神经,但是示出了右迷走神经作为示例。左迷走神经靠近左颈内静脉263和颈总动脉延伸,然后越过左头臂静脉255。胸交感神经分支还在更靠近主动脉冠并且更内侧,大致在左锁骨下静脉和颈内静脉263的汇合处和左头臂静脉253的长度的约一半之间越过左头臂静脉255。可能没有被一般地被刻画为心血管的脉管系统也可以根据本文描述的某些方法和系统来使用。
图2K是心脏200和周围神经的另一示意图。如本文详细地描述的,可以通过将导管定位在肺动脉(例如,右肺动脉、肺动脉干、左肺动脉)中来将影响收缩性和/松弛性(例如,左心室收缩性和/松弛性)的神经作为目标以进行神经调节。在一些示例中,例如右星状CPN244还可以或替代地通过将装置定位在左锁骨下动脉274中的位置272或降主动脉278中的位置276处来被作为目标。定位在左颈总动脉280中也是可能的。在图2K中,在位置272,276处示出了示例性刺激装置282。其他刺激装置也是可能的。在包括多个刺激装置的示例中,刺激装置可以相同、不同或相似(作为非限制性示例,具有相同结构但尺寸不同)。
图2L示出了示例性刺激装置282。刺激装置282可以被用于例如将对右星状CPN244或另一神经进行刺激作为目标。装置282包括骨架结构284,例如支架、圈环等。骨架结构284可以包括自扩张的形状记忆材料(例如,镍钛诺)。装置282还包括与骨架结构284附接的网格或膜286。网格286可以例如包括 装置282的一侧包括电极阵列288。电极阵列288可以具有约0.5cm2至约3cm2之间的面积(例如,约0.5cm2、约1cm2、约1.5cm2、约2cm2、约2.5cm2、约3cm2、这样的值之间的范围等)。电极阵列288可以由可植入电子器件290供电。电子器件290可以包括例如非易失性存储器(例如,存储电极组合和参数)、ASIC刺激引擎和逻辑、RF引擎、电池电源和传感器(例如,压力传感器、收缩性传感器、其组合等)。装置282可以借助通过脉管系统(例如,从股动脉或桡动脉)传送的导管而被定位。装置282可以能够被定位直到目标神经被刺激。在一些示例中,电极阵列288可以以电子方式重新定位(例如,关于图32A-32D所述)。在一些示例中,外部装置(例如,由受试者穿戴)可以对装置282供电和/或进行控制。在电子器件290可以对装置282供电和/或进行控制的示例中,装置282可以完全可植入。在某些这样的示例中,装置282可以与起搏器、除颤器或其他可植入刺激装置组合。
装置282的一侧包括电极阵列288。电极阵列288可以具有约0.5cm2至约3cm2之间的面积(例如,约0.5cm2、约1cm2、约1.5cm2、约2cm2、约2.5cm2、约3cm2、这样的值之间的范围等)。电极阵列288可以由可植入电子器件290供电。电子器件290可以包括例如非易失性存储器(例如,存储电极组合和参数)、ASIC刺激引擎和逻辑、RF引擎、电池电源和传感器(例如,压力传感器、收缩性传感器、其组合等)。装置282可以借助通过脉管系统(例如,从股动脉或桡动脉)传送的导管而被定位。装置282可以能够被定位直到目标神经被刺激。在一些示例中,电极阵列288可以以电子方式重新定位(例如,关于图32A-32D所述)。在一些示例中,外部装置(例如,由受试者穿戴)可以对装置282供电和/或进行控制。在电子器件290可以对装置282供电和/或进行控制的示例中,装置282可以完全可植入。在某些这样的示例中,装置282可以与起搏器、除颤器或其他可植入刺激装置组合。
图3A是导管300的示例的侧透视和局部横截面视图。图3B是沿着图3A的线3B-3B观察到的图3A的导管300的远端视图。导管300包括具有第一端或近端304和第二端或远端306的细长主体302。第二端306在第一端304远端。细长主体302包括延伸通过细长主体302的第一端304和第二端306的纵向轴线308。第一平面310在细长主体302的长度上延伸通过纵向轴线308。当在本中使用时,平面是虚拟的平坦表面,连接其上任意两点的直线将整个地位于该平坦表面上,并且平面在本文中用于帮助定位结构在导管300上的相对位置。第一平面110在本文中除了其他原因之外特别地用于帮助说明电极的相对位置。导管300还包括至少两个细长的刺激构件314(在图3A和3B中示意为314a和314b)。刺激构件314从细长主体302延伸。至少两个细长的刺激构件314a,314b中的每一个弯曲到至少部分由第一平面310限定的第一体积316中。例如,至少两个细长的刺激构件314从细长主体302的大约第二端306延伸到第一体积316中。
至少两个细长的刺激构件314中的每一个包括至少一个电极318。细长的刺激构件314中的每一个上的至少一个电极318在至少部分地由第一平面310限定的第一体积316中形成电极阵列。刺激构件314中的每一个上的至少一个电极318彼此电隔离。在一些示例中,刺激构件314包括电绝缘材料。
至少一个电极318中的每一个耦接到对应的导电元件320。导电元件320彼此电隔离,并且从每个相应的电极318通过细长主体302的第一端304延伸通过刺激构件314和/或沿着刺激构件314延伸。导电元件320终止于连接器端口处,其中每个导电元件320能够可释放地耦接到刺激系统,例如,如本文所述。在一些示例中,导电元件320永久地耦接到刺激系统(例如,不可释放地耦接)。刺激系统可以用于提供刺激电能量,刺激电能量通过导电元件320传导并传送在电极阵列中的电极318的组合上。
至少两个细长的刺激构件314中的每一个包括具有远端324的刺激构件细长主体322。细长的刺激构件314中的每一个的刺激构件细长主体322的远端324从细长主体302延伸。细长主体302和刺激构件细长主体322中的每一个包括限定丝线326可以从其延伸通过的内腔328的表面。丝线326在刺激构件细长主体322的远端324处或在该远端324附近连接到其相应的刺激构件细长主体322,其中丝线326从而穿过细长主体302的第一端304自由地延伸通过细长的刺激构件314中的内腔328。内腔328的尺寸设置成允许丝线326在内腔328内纵向地移动。从第一端304延伸的丝线326的部分可用于在刺激构件细长主体的远端324处或在该远端324附近对刺激构件细长主体322施加压力,其中丝线326在这样的压力下会偏转或屈曲,这可以将弯曲赋予到进入至少部分地由第一平面310限定的第一体积316中的至少两个细长的刺激构件314中的每一个中。至少两个细长的刺激构件314在径向上远离细长主体302在一系列距离上延伸,所述距离取决于丝线326上被施加了多大的压力。至少两个细长的刺激构件314的弯曲可以具有沿刺激构件细长主体322的长度改变的曲率半径(例如,如图3A所示)。
在一些示例中,至少两个细长的刺激构件314仅弯曲到至少部分地由第一平面310限定的第一体积316中。与第一体积相对并且至少部分地由第一平面310限定的第二体积可以不包含电极。在一些示例中,至少两个细长的刺激构件314包括第一细长刺激构件314a和第二细长刺激构件314b。第二平面312沿着细长主体302的纵向轴线308与第一平面310相交。第一平面310和第二平面312将第一体积316分成第一象限体积332和第二象限体积334。在一些示例中(例如,如图3A和3B所示),第一细长刺激构件314a弯曲到第一象限体积332中并且第二细长刺激构件314b弯曲到第二象限体积334中。
导管300可以包括从细长主体302延伸到第二体积330中的锚固构件336。锚固构件336可以不包括电极或可以没有电极。锚固构件336不在脉管系统内闭塞和/或不在脉管系统内促发血栓或血液凝结。锚固构件336和细长主体302包括限定丝线340可以从其穿过的内腔338的表面。丝线340在构件336的远端342处或在该远端324附近连接到锚固构件336,其中丝线340穿过细长主体302的第一端304自由地延伸通过锚固构件336的内腔338。内腔338的尺寸设置成允许导线340在内腔338内纵向地移动。丝线340从第一端304延伸的部分可以用于在锚固构件336远端342或远端342附近对锚固构件336施加压力,其中丝线340在这样的压力下会偏转或屈曲,这可以将弯曲赋予到锚固构件336。锚固构件336可以在径向上远离细长主体302在一系列距离上延伸,所述距离取决于丝线340上被施加了多大的压力。锚固构件336可以用于使电极318与血管腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触,例如如本文所述,通过施加各种不同的压力。可选地,锚固构件336可以被配置为包括一个或多个电极。
丝线326和丝线340中的每一个在被用于将弯曲赋予到其相应的构件中之后,可以通过抑制或防止丝线326,340相对于细长主体302的纵向移动而被可释放地锁定就位。例如,可以使用夹具或其他装置将丝线326,340与内腔328,338的表面之间的接触形成足以抑制或防止丝线326,340相对于内腔328,338的表面相对移动。这种夹紧作用还可以用作止血阀以减少或最小化血液流失。
图3A和3B还示出了在导管系统中可以与导管300一起使用的肺动脉导管344(部分地被显示以示出导管300的细节)。肺动脉导管344包括细长导管主体346,细长导管主体346具有第一端或近端348、第二端或远端350、外围表面352和与外围表面352相对的内表面354。内表面354至少部分地限定在细长导管主体346的第一端348和第二端350之间延伸的内腔356。内腔356的大小和形状足以在传送导管300期间在内腔356内部容纳导管300的至少一部分。例如,锚固构件336和至少两个细长刺激构件314以及细长主体302的至少一部分可以至少部分地定位在内腔356中。锚固构件336、至少两个细长刺激构件314和细长主体302的至少一部分可以在传送和植入导管300期间从肺动脉导管344的远端350部署。
肺动脉导管344还可以包括在细长导管主体346的外围表面352上的可膨胀球囊358。可膨胀球囊358包括具有内表面362的球囊壁360,内表面362连同细长导管主体346的外围表面352的一部分至少部分限定流体密封体积364。肺动脉导管344还包括延伸通过细长导管主体346的膨胀内腔366。膨胀内腔366包括进入可膨胀球囊358的流体密封体积364的第一开口368和在第一开口368近端的第二开口370,以允许流体移入和移出流体密封体积364从而分别使球囊膨胀和紧缩。包含流体(例如,盐水、造影剂、气体(例如氧气))的注射器或其他这样的装置可以用于使球囊358膨胀和紧缩。图3A示出球囊358处于扩张状态,而图3B示出球囊358处于紧缩状态。
例如,如本文所述,导管系统可以用于将导管300定位在患者的主肺动脉和/或肺动脉中的一个或两个中。在导管300定位在内腔356内的情况下,肺动脉导管344可以通过透皮切口被引入脉管系统并且引导到右心室。例如,导管300可以经由手臂的外周静脉插入到脉管系统中(例如,像周边地插入的中心导管一样)。受试者的来自脉管系统的心电图和/或压力信号的变化可以用来引导导管300并将其定位在受试者的心脏内。一旦处于适当位置,就可以使球囊358膨胀以允许肺动脉导管344和导管300通过血液的流动从右心室被携带到主肺动脉和/或肺动脉中的一个。可选地,在将导管300和/或导管系统定位在主肺动脉和/或肺动脉中的一个时可以使用各种成像医疗器械。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
导管系统可以沿着主肺动脉推进直到肺动脉导管344的远端350接触主肺动脉的顶部(例如,在肺动脉瓣远端并且与两个肺动脉相邻的位置)。推进可以在球囊358处于膨胀或紧缩状态下进行。一旦肺动脉导管344的远端350到达主肺动脉的顶部,就可以使细长导管主体346相对于导管300移动以便从肺动脉导管344的内腔356部署导管300。
导管主体302的外围表面可以包括标记,所述标记例如从第一端304开始并延伸到导管300的第二端306。标记之间的距离可以具有几个单位(例如,毫米、英寸等),这可以允许确定肺动脉导管344的远端350和主肺动脉的顶部之间的长度。标记可以还或替代地设置在导管主体302的外围表面上,其指示何时肺动脉导管344的远端350摆脱了锚固构件336和细长刺激构件314。在一些示例中,例如,如本文进一步详细地讨论的,定位测量仪器可以用于将导管300定位在主肺动脉内。
测量距离主肺动脉的顶部的距离的能力可以有助于将电极318放置在主肺动脉的期望位置中。除了测量距离主肺动脉的顶部的从其放置细长主体302的第二端306的距离之外或替代这样的测量,细长主体302也可以用于识别或映射电极314在脉管系统内的位置(例如,期望或最优位置)。例如,使用导管主体302的外围表面上的标记,细长主体302的第二端306可以被定位在距离主肺动脉的顶部的期望距离处。丝线326和340然后可以用于将弯曲赋予到细长刺激构件314和锚固构件336中。使用丝线326和丝线340,细长刺激构件314和锚固构件336可以被赋予弯曲,所述弯曲的大小足以接触主肺动脉的表面,例如主肺动脉的前表面,这可以使电极318与主肺动脉或肺动脉中的一个(左肺动脉或右肺动脉)接触。将可以理解,锚固件336偏置并且帮助沿着血管表面(例如,沿着主肺动脉或肺动脉中的一个(左肺动脉或右肺动脉)的后表面)锚固电极318。
归因于其可调整性质(例如,至少部分地取决于向丝线340施加多少压力或纵向力),锚固构件336可以用于借助各种不同压力使电极318与主肺动脉或肺动脉中的一个的腔面接触。例如,锚固构件336可以借助第一压力使电极318与主肺动脉或肺动脉中的一个的腔面接触。使用刺激系统,例如,如本文所述,刺激电能量可以在电极阵列中的至少一个电极318中的两个或更多个的组合上传送。可以监测和记录受试者对于刺激电能量的心脏响应,以与其他后续测试进行比较。
对于本文所讨论的导管和/或导管系统中的任一个,定位在受试者身体中或上的电极(包括参考电极(例如,如本文讨论的参考电极))的任何组合都可以用于向受试者提供刺激和感测来自受试者的心脏信号。
可以减小压力并且可以沿顺时针或逆时针方向旋转细长主体302以重定位电极318以与主肺动脉或肺动脉中的一个的腔面接触。刺激系统可以用于在电极阵列中的至少一个电极318中的两个或更多个的组合上传送刺激电能量。然后可以监测和记录受试者对于该测试的心脏响应以与先前和/或后续测试进行比较。以这种方式,可以识别沿着主肺动脉或肺动脉中的一个的腔面定位电极318的优选位置。一旦已经识别出用于定位电极318的优选位置,就可以使用丝线340来增加由锚固构件336施加的压力,这可以帮助进一步将导管300锚固在患者中。
图4A是导管400的另一示例的侧透视和局部横截面视图。图4B是沿着图4A的线4B-4B观察到的图4A的导管400的远端视图。导管400至少包括关于导管300在本文进行讨论的结构,因此不再重复对共享或相似元件的详细讨论,而是在图4A和4B中元件编号在百位递增,其中要理解对这些元件的讨论是暗含的。
至少两个细长刺激构件414中的每一个包括多个电极(例如,图4A和4B中示出的三个电极418,但是其他数量(例如,1个、2个、4个、5个或更多个)也是可能的)。细长刺激构件414上的电极418形成电极阵列。刺激构件414中的每一个上的电极418彼此电隔离。
导管400还包括在至少两个细长刺激构件414中的至少两个之间延伸的结构472。结构472是柔性的以使得其可以在允许结构472被传送到主肺动脉和/或肺动脉中的一个中的传送或低轮廓状态(径向折叠状态)和如图4A所示的部署或扩张状态(径向扩张)之间转变。例如,如本文所描述,丝线426和至少两个细长刺激构件414可以用于使结构472变成其部署或扩张状态。结构472的示例为网格结构。
结构472包括经连接以在股线之间形成开口图案的多个柔性股线。一个或多个电极474可以存在于股线的一个或多个连接处。电极474自己可以形成电极阵列,或者可以与电极418一起形成电极阵列。在包括多个电极474的示例中,电极474可以排列(例如,如图4A所示)成二维图案、三维图案(例如,考虑刺激构件细长主体422的曲率),或者分散而没有特定顺序。股线可以包括与细长主体402和/或细长刺激构件414相同的材料,或者与细长主体402和/或细长刺激构件414不同的材料。股线可以包括绝缘材料。用于本文提供的导管和结构的一个或多个部分的绝缘材料的例子可以包括但不限于:医用级聚氨酯,尤其是例如,基于聚酯的聚氨酯、基于聚醚的聚氨酯和基于碳酸酯的聚氨酯;聚酰胺、聚酰胺嵌段共聚物、聚烯烃(例如,聚乙烯(例如,高密度聚乙烯,低密度聚乙烯))以及聚酰亚胺。
结构472可以具有有助于在其上设置或定位细长刺激构件414和电极418中的至少一个的预定形状。例如,结构472可以用于调整和/或保持相邻刺激构件414上的电极418之间的距离。
结构472可以包括一个或多个附加电极474。附加电极474可以定位在结构472上或者形成为结构472的一体部分。附加电极474中的每一个可以与其他电极474和/或电极418中的每一个电隔离。附加电极474均可以包括导电元件476。导电元件476中的每一个彼此电隔离并且可以从每个相应的附加电极474延伸通过结构472的股线,通过刺激构件414和细长主体402到第一端404。导电元件476终止于连接器端口处,其中导电元件420和476中的每一个能够可释放地耦接到刺激系统,例如,如本文所述。在一些示例中,导电元件420可以不可释放地或永久地耦接到刺激系统。刺激系统可以用于提供刺激电能量,刺激电能量通过导电元件420,476传导到至少一个附加电极474和/或至少一个电极418的组合。
图4C是导管的一部分401的示例的侧透视图。部分401可以与导管300,400、本文描述的其他导管等一起使用。部分401包括多个细长样条471。样条471可以包括被配置例如在导管主体中不受约束时形成扩张形状(例如,图4C中示出的锥形形状或其他形状)的弹性或形状记忆材料。部分401包括在细长样条471中的至少两个之间延伸的结构472。一个或多个电极474可以耦接到结构472(例如,通过粘附、钎焊、熔焊、捆系、其组合等)。电极474可以与样条471对齐、排列在样条471之间和其组合。例如,在部分401中,结构472在三个周向偏移的样条471上方。中间一组四个电极474与中间样条471对齐,并且外侧几组四个电极474在中间样条471和外侧样条471之间,形成电极474的3×4阵列或矩阵。在包括多个电极474的示例中,电极474可以排列(例如,如图4C所示)成二维图案、三维图案(例如,考虑样条471的扩张形状的曲率),或者分散而没有特定顺序。电极474自己可以形成电极阵列,或者可以与其他电极(例如,样条471上的电极)一起形成电极阵列。
结构472可以包括编织或针织网格或膜。所述结构可以包括绝缘材料,例如医用级聚氨酯,例如,基于聚酯的聚氨酯、基于聚醚的聚氨酯和基于碳酸酯的聚氨酯;聚酰胺、聚酰胺嵌段共聚物、聚烯烃(例如,聚乙烯(例如,高密度聚乙烯,低密度聚乙烯))以及聚酰亚胺等。
在一些示例中,结构472可以在样条471上方滑动。例如,结构472的侧向边缘或中间部分可以包括配置为在样条471上方滑动的环。尽管在图4C中被示出为在部分401的圆周的一部分上为弧形,但是结构472可以绕部分401的整个圆周为弧形。在某些这样的示例中,结构472可以在样条471上方滑动作为伸缩管。结构472可以耦接到样条471和/或系拴到导管。
在一些示例中,可以使用多个结构472。例如,可以绕样条471定位多个部分弧形的结构(例如,在不同的周向位置,在重叠的周向位置和/或在相同周向位置(例如,具有不同的电极474的图案))。对于另一示例,结构472可以基本上是管状的,以使得其可以在单个样条上滑动,或者可以在不同样条或甚至是相同样条上使用多个这样的结构472。
在结构472上形成电极可以有助于制造。例如,电极474可以独立于形成样条471耦接到结构472(例如,与在样条471中或上形成电极不同)。在一些示例中,电极474可以形成在结构472上,例如像柔性电路制造一样。结构472还可以帮助定位将电极474电连接到刺激系统的导电元件。
导管400可选地包括纵向延伸通过刺激构件细长主体的锚固丝线478。细长主体402和构件细长主体422包括至少部分地限定内腔的表面,所述内腔具有在近端404处的第一开口和在刺激构件细长主体422的远端424处或附近的第二开口。锚固丝线478自由地穿过内腔,其中第一端480在细长主体402的近端404处从细长主体422延伸并且第二端482包括从在刺激构件细长主体422的远端处或附近的第二开口延伸的锚固结构(例如,倒钩)。锚固丝线478可以被推进通过内腔(例如,可以向锚固丝线478的第一端480施加纵向力),以使锚固结构远离刺激构件细长主体414延伸。例如,如本文所讨论,锚固构件436可以帮助将导管400锚固在受试者中。锚固丝线478还可以或替代地用于帮助将导管400固定在受试者中的期望位置处。导管300还可以包括有锚固丝线478和关联结构中的一个或多个。可选地,锚固丝线478可以被配置和用于对于本公开的刺激系统的电极。例如,锚固丝线478可以被配置为阳极并且电极418,474中的一个或多个可以被配置为阴极和/或阳极,和/或锚固丝线478可以被配置为阴极并且电极418,474中的一个或多个可以被配置为阳极和/或阴极。
图4A还示出了肺动脉导管444(部分地被显示以示出导管400的细节),其例如与本文所讨论的肺动脉导管344类似。例如,如本文所述,包括肺动脉导管444的导管系统可以用于将导管400定位在患者的主肺动脉和/或肺动脉中的一个中。在导管400定位在内腔454内的情况下,肺动脉导管444通过透皮切口被引入脉管系统并且引导到右心室。球囊458通过膨胀内腔被膨胀,允许肺动脉导管444和导管400通过血液的流动从右心室被携带到主肺动脉或肺动脉中的一个。
图4A和4B中示出的导管系统包括可选的定位测量仪器484。定位测量仪器484包括具有第一端488和在第一端488远端的缓冲器端490的细长测量仪器主体486。细长测量仪器主体486可以在内腔492内纵向移动,内腔492至少部分地由从细长主体402第一端404通过第二端406延伸通过细长主体402的表面限定。缓冲器端490可以具有这样的形状,其示例性表面区域不小于垂直于纵向轴线408截取的细长主体402的远端406的表面区域。细长测量仪器主体486延伸通过内腔492以在细长主体402的第二端406的远端定位缓冲器端490。定位测量仪器484的第一端488从细长主体402近端地延伸。细长测量仪器主体486可以包括标记494,标记494指示细长主体402的第二端406和定位测量仪器484的缓冲器端490之间的长度。
在引导导管400期间,定位测量仪器484的缓冲器端490在纵向上可以近似与刺激构件细长主体422的远端424、锚固构件436的远端442以及肺动脉导管444的远端450齐平(例如,细长主体402、锚固构件436和细长刺激构件444定位在肺动脉导管444的内腔456中)。在该配置中,导管系统可以沿着主肺动脉推进直到定位测量仪器484的缓冲器端490接触主肺动脉的顶部(例如,在肺动脉瓣远端并且与两个肺动脉相邻的位置)。在球囊458处于膨胀或紧缩状态的情况下,导管系统可在超过肺动脉瓣时远端地推进。
一旦缓冲器端490接触主肺动脉的顶部,就可以相对于缓冲器端490移动肺动脉导管444(在导管400定位在内腔456的情况下)(例如,可以远离缓冲器端490移动肺动脉导管444和导管400)。当肺动脉导管444和导管400相对于缓冲器端490移动时,细长测量仪器主体486上的标记494可以用于指示刺激构件细长主体422的远端224、锚固构件436的远端442、肺动脉导管444的远端450和定位测量仪器484的缓冲器端490之间的长度。标记494之间的距离可以以特定单位(例如,毫米、英寸等)计,这可以允许确定刺激构件细长主体422的远端424、锚固构件436的远端442和肺动脉导管444的远端450之间的长度。一旦取得了所期望的长度,就可以相对于导管400移动肺动脉导管444以便将锚固构件436和具有电极418的细长刺激构件414部署在主肺动脉或肺动脉中的一个内。
测量距离主肺动脉的顶部的距离的能力可以有助于将电极418放置在主肺动脉或肺动脉中的一个的期望位置中。例如,使用定位测量仪器484的外围表面上的标记494,刺激构件细长主体422的远端424和锚固构件436的远端442可以被定位在距离主肺动脉的顶部的期望距离处。丝线426,440可以分别用于将弯曲赋予到细长刺激构件414和锚固构件436中。使用丝线426和丝线440,细长刺激构件414和锚固构件436可以被提供弯曲,所述弯曲的大小足以接触主肺动脉的前表面并且可以使电极418与主肺动脉的腔面接触。锚固构件436可以偏置并且帮助沿着血管表面(例如,沿着主肺动脉的后表面)锚固电极418。可选地,锚固构件436可以被配置为包括一个或多个电极418,例如,如本文所述。
归因于其可调整性质(例如,改变取决于纵向力的量的贴近压力或者向丝线440施加压力),锚固构件436可以用于在各种不同压力下使电极418与主肺动脉或肺动脉中的一个的腔面接触。例如,锚固构件436可以在第一压力下使电极418与主肺动脉或肺动脉中的一个的腔面接触。使用来自刺激电极的刺激电能量,电能量可能被传送在电极418,474中的两个或更多个的组合上。然后可以监测和记录受试者对于刺激电能量的心脏响应,以与后续测试进行比较。如果需要,可以减小施加到锚固构件436的纵向压力,并且可以在顺时针或逆时针方向上旋转细长主体402和/或相对于主肺动脉或肺动脉中的一个的顶部在长度方向上旋转细长主体402以将电极418重新定位成与主肺动脉或肺动脉中的一个的腔面接触。刺激系统可以再次用于在电极418,474中的两个或更多个的组合上传输刺激电能量。然后可以监测和记录受试者对于该后续测试的心脏响应以与先前和后续测试进行比较。以这种方式,可以识别沿着主肺动脉或肺动脉中的一个的腔面定位电极418的优选位置。一旦被识别,就可以使用丝线440来增加由锚固构件436施加的压力,从而帮助更好地将导管400锚固在患者中。
现在参考图5,示出了导管500的示例,其中导管500可以包括本文讨论的其他导管的结构和特征。如图所示,导管500包括具有第一端504和在第一端504远端的第二端506的细长主体502。如图所示,细长主体502包括延伸通过细长主体502的第一端504和第二端506的细长径向轴线508。如图所示,第一平面510在细长主体502的长度上延伸通过细长径向轴线508。第二平面512沿着细长主体502的纵向轴线508与第一平面510相交。第一平面510和第二平面512将第一体积516分成第一象限体积532和第二象限体积534。导管500还包括至少两个细长的刺激构件514,如本文讨论,其从细长主体502延伸。至少两个细长的刺激构件514-1和514-2中的每一个弯曲到至少部分由第一平面510限定的第一体积516中。例如,至少两个细长的刺激构件514可以从细长主体502的大约第二端506延伸到第一体积516中。
图5还示出了在至少两个细长刺激构件514中的每一个上的至少一个电极518。细长的刺激构件514中的每一个上的至少一个电极518形成第一体积516中的电极阵列。细长刺激构件514中的每一个上的至少一个电极518可以彼此电隔离和/或可以包括电绝缘材料。导管500还包括导电元件520,其延伸通过每个细长刺激构件514和/或沿着每个细长刺激构件514延伸。如本文所述,导电元件520可以将电流传导到电极518中的两个或更多个的组合。导电元件520可以彼此电隔离。导电元件520可以终止于连接器端口处,其中每个导电元件520能够可释放地耦接到刺激系统,例如,如本文所述。在一些示例中,导电元件520永久地耦接到刺激系统(例如,不可释放地耦接)。刺激系统可以用于提供刺激电能量,刺激电能量通过导电元件520传导并传送在电极阵列中的电极518的组合上。
至少两个细长的刺激构件514中的每一个包括具有可以相对于彼此移动的远端524的刺激构件细长主体522。换言之,刺激构件细长主体522中的每一个的远端524均彼此自由。如图5所示,至少两个细长的刺激构件514仅在至少部分地由第一平面510限定的第一体积516中弯曲。图5还示出了不包含电极的至少部分地由第一平面510限定的第二体积530(与第一体积516相对)。图5还示出了至少两个细长的刺激构件514包括第一细长的刺激构件514-1和第二细长的刺激构件514-2的示例,其中第一细长的刺激构件514-1弯曲到第一象限体积532中并且第二细长的刺激构件514-2弯曲到第二象限体积534中,如先前本文所述。导管500还包括从细长主体502延伸到第二体积530中的锚固构件536。如图所示,锚固构件536不包括电极。锚固构件536包括关于前面附图在之前讨论的细长主体538。可选地,锚固构件536可以被配置为包括一个或多个电极518,如本文所述。
至少两个细长的刺激构件514和锚固构件536中的每一个还可以包括丝线566,其分别纵向延伸通过刺激构件细长主体522和细长主体538。丝线566可以给至少两个细长的刺激构件514和锚固构件536中的每一个提供预定形状。例如,至少两个细长的刺激构件514和锚固构件536中的每一个中的丝线566可以具有线圈或螺旋配置,其分别将弯曲赋予到刺激构件细长主体522和细长主体538。丝线566还可以向刺激构件细长主体522赋予硬度,该硬度足以在位于患者的脉管系统内的状况下保持预定形状。这样,例如,丝线566向刺激构件细长主体522提供充足的硬度和柔韧性以使至少两个细长的刺激构件514在被放置在患者的脉管系统中时弹性地返回到其弯曲配置。
丝线566可以由各种不同金属或金属合金形成。这样的金属或金属合金的示例包括手术级不锈钢,例如尤其是奥氏体516不锈钢和以镍钛诺(Nitinol)为人所知的镍钛合金。根据需要和/或需求还可以使用其他金属和/或金属合金。所述预定形状可以适于顺应于特定解剖学结构(例如,右或左肺动脉或肺动脉干的其他部分)。
至少两个细长的刺激构件514还可以包括锚固丝线514,如本文所述,其纵向延伸通过刺激构件细长主体522和细长主体502中的内腔。锚固丝线544包括从细长主体502延伸的第一端546和具有锚固结构(例如,倒钩)的第二端548。锚固丝线544可以被推进通过内腔(例如,可以向锚固丝线544的第一端546施加纵向力)以使锚固结构远离刺激构件细长主体514延伸。除了使用锚固构件536帮助更好地将导管500锚固在患者中之外,如本文所述,锚固丝线544还可以用于将导管500固定在患者中的预定位置处。可选地,锚固丝线544可以被配置和用于对于本公开的刺激系统的电极。
根据若干示例,导管500还包括肺动脉导管591,如本文所述。如图所示,可以与导管500一起使用肺动脉导管591(部分地被显示以示出导管300的细节)以提供导管系统。肺动脉导管591包括细长导管主体5100,细长导管主体5100具有第一端5102、第二端5104、外围表面5106和与外围表面5106相对的内表面5108。内表面5108限定在细长导管主体5100的第一端5102和第二端5104之间延伸的内腔5110。内腔5110的大小和形状足以在传送导管500期间在内腔5110内部容纳导管500的至少一部分。例如,锚固构件536和至少两个细长刺激构件514以及细长主体502的至少一部分可以在传送期间定位在内腔5110内。锚固构件536、至少两个细长刺激构件514和细长主体502的至少一部分可以在传送和植入导管500期间从肺动脉导管591的远端5104部署。
肺动脉导管591还可以包括在细长导管主体5100的外围表面5106上的可膨胀球囊5112。可膨胀球囊5112包括具有内表面5116的球囊壁5114,内表面5116连同细长导管主体5100的外围表面5106的一部分限定流体密封体积5118。肺动脉导管591还包括膨胀内腔5120,膨胀内腔5120延伸通过细长导管主体5100,其中膨胀内腔5120具有进入可膨胀球囊5112的流体密封体积5118中的第一开口5122和在第一开口5122近端的第二开口5124,以允许流体移动到流体密封体积5118中以使球囊5112膨胀和紧缩,如本文所述。图5所述的导管系统可以用于例如将导管500定位在患者的主肺动脉202和/或肺动脉206,208中的一个或两个中,例如,如本文所述。可以通过相对于细长主体502使细长导管主体5100移动回到至少两个细长刺激构件514和锚固构件536上来将至少两个细长刺激构件514和锚固构件536重新定位在肺动脉导管591的内腔5110内。图5所示的导管系统可以可选地包括例如关于图4A和4B所述的定位测量仪器。
现在参考图6,示出了导管600的另一示例。如图所示,导管600包括具有第一端604和在第一端604远端的第二端606的细长主体602。如图所示,细长主体602包括延伸通过细长主体602的第一端604和第二端606的细长径向轴线608。如图所示,第一平面610在细长主体602的长度上延伸通过细长径向轴线608。第二平面612沿着细长主体602的纵向轴线608与第一平面610相交。第一平面610和第二平面612将第一体积616分成第一象限体积632和第二象限体积634。导管600包括至少两个细长的刺激构件614,其从细长主体602延伸。至少两个细长的刺激构件614-1和614-2中的每一个弯曲到至少部分由第一平面610限定的第一体积616中。例如,至少两个细长的刺激构件614从细长主体602的大约第二端606延伸到第一体积616中。
图6还示出了在至少两个细长刺激构件614中的每一个上的至少一个电极618。细长刺激构件614上的多个电极618可以形成第一体积616中的电极阵列。导管600还包括导电元件620,其延伸通过每个细长刺激构件614和/或沿着每个细长刺激构件514延伸。如本文先前所述,导电元件620可以将电流传导到电极618中的两个或更多个的组合。
至少两个细长刺激构件614中的每一个包括均具有从细长主体602延伸的远端624的刺激构件细长主体622。在一些示例中(例如,如图6所示),至少两个细长的刺激构件614仅在至少部分地由第一平面610限定的第一体积616中弯曲。图6还示出了不包含电极的至少部分地由第一平面610限定的第二体积630(与第一体积616相对)。图6还示出了至少两个细长的刺激构件614包括第一细长的刺激构件614-1和第二细长的刺激构件614-2的示例,其中第一细长的刺激构件614-1弯曲到第一象限体积632中并且第二细长的刺激构件614-2弯曲到第二象限体积634中,例如如先前本文所述。导管600还包括从细长主体602延伸到第二体积630中的锚固构件636。如图所示,锚固构件636不包括电极。锚固构件636包括例如先前讨论的细长主体638。可选地,锚固构件636可以被配置为包括一个或多个电极618。
至少两个细长的刺激构件614和锚固构件636中的每一个还可以包括丝线666,其分别纵向延伸通过刺激构件细长主体622和细长主体638和/或沿着刺激构件细长主体622和细长主体638延伸。丝线666可以给至少两个细长的刺激构件614和锚固构件636中的每一个提供预定形状。例如,至少两个细长的刺激构件614和锚固构件636中的每一个中的丝线666可以具有线圈或螺旋配置,其分别将弯曲赋予到刺激构件细长主体622和细长主体638。丝线666还可以向刺激构件细长主体622赋予硬度,该硬度足以在位于患者的脉管系统内的状况下保持预定形状。这样,例如,丝线666可以向刺激构件细长主体622提供充足的硬度和柔韧性以使至少两个细长的刺激构件614在被放置在患者的脉管系统中时弹性地返回到其弯曲配置。丝线666可以由各种不同金属或金属合金(例如,本文关于其他示例讨论的那些金属或金属合金)形成。
至少两个细长刺激构件614还可以包括锚固丝线644,其纵向延伸通过刺激构件细长主体622和/或沿着刺激构件细长主体622延伸。锚固丝线644包括从细长主体602延伸的第一端646和具有锚固结构(例如,倒钩)的第二端648。施加到锚固丝线644的第一端646的纵向力使锚固丝线644推进通过刺激构件细长主体614以远离刺激构件细长主体614延伸锚固结构。可选地,锚固丝线644可以被配置和用于对于本公开的刺激系统的电极。
导管600还包括肺动脉导管691,如本文先前所述。如图所示,可以与导管600一起使用肺动脉导管691(部分地被显示以示出导管600的细节)以提供导管系统。肺动脉导管691包括细长导管主体670,细长导管主体670具有第一端680、第二端682、外围表面676和与外围表面676相对的内表面672。内表面672限定在细长导管主体670的第一端680和第二端682之间延伸的内腔674。内腔674的大小和形状可以足以在传送导管600期间在内腔674内部容纳导管600的至少一部分。例如,锚固构件636和至少两个细长刺激构件614以及细长主体602的至少一部分可以定位在内腔674内。锚固构件636、至少两个细长刺激构件614和细长主体602的至少一部分可以在传送和植入导管600期间从肺动脉导管691的远端682部署。
肺动脉导管691还可以包括在细长导管主体670的外围表面676上的可膨胀球囊668。可膨胀球囊668具有带有内表面690的球囊壁688,内表面690连同细长导管主体670的外围表面676的一部分限定流体密封体积692。肺动脉导管691还包括膨胀内腔694,膨胀内腔694延伸通过细长导管主体670,其中膨胀内腔694具有进入可膨胀球囊668的流体密封体积692中的第一开口696和在第一开口696远端的第二开口698,以允许流体移动到流体密封体积692中以使球囊668膨胀和紧缩,例如,如本文先前所述。图6所示的导管系统可以用于将导管600定位在患者的主肺动脉和/或肺动脉中的一个或两个中,例如,如本文所述。可以通过相对于细长主体602使细长导管主体670移动回到至少两个细长刺激构件614和锚固构件636上来将至少两个细长刺激构件614和锚固构件636重新定位在肺动脉导管691的内腔694内。图6所示的导管系统可以可选地包括例如关于图4A和4B所述的定位测量仪器。
现在参考图7A和7B,示出了可以与本文所述的任何导管(例如,导管300、400、500或600)一起使用的肺动脉导管791的替代示例。如图所示,肺动脉导管791包括细长导管主体7100,细长导管主体7100具有第一端7102、第二端7104、外围表面7106和与外围表面7106相对的内表面7108。内表面7108限定在细长导管主体7100的第一端7102和第二端7104之间延伸的内腔7110。内腔7110的大小和形状足以在传送导管期间在内腔7110内部容纳导管(例如,导管300、400、500或600)的至少一部分。例如,锚固构件和至少两个细长刺激构件以及细长主体的至少一部分可以定位在内腔7110内。锚固构件、至少两个细长刺激构件和细长主体的至少一部分可以在传送和植入导管(例如,导管300、400、500或600)期间从肺动脉导管791的远端7104部署。
肺动脉导管791包括可膨胀球囊7112。如图所示,可膨胀球囊7112定位在穿过球囊内腔7302的细长膨胀导管主体7300上。球囊内腔7302由可以从第一端7102延伸通过细长导管主体7100的第二端7104的内腔面7304限定。球囊内腔7302具有允许细长膨胀导管主体7300在球囊内腔7302内纵向移动的横截面尺寸。这样,可膨胀球囊7112可以相对于肺动脉导管791的远端7104移动。
可膨胀球囊7112具有带有内表面7116的球囊壁7114,内表面7116连同细长膨胀导管主体7300的外围表面7106的一部分限定流体密封体积7116。细长膨胀导管主体7300还包括膨胀内腔7120,膨胀内腔7120延伸通过细长膨胀导管主体7300,其中膨胀内腔7120具有进入可膨胀球囊7112的流体密封体积7116中的第一开口7122和在第一开口7122近端的第二开口7124,以允许流体移动到流体密封体积7116中以使球囊7112膨胀和紧缩。包含流体(例如,盐水或气体(例如氧气))的注射器或其他已知装置可以用于使球囊7112膨胀和紧缩。球囊内腔7302的横截面尺寸足以允许可膨胀球囊7112在其完全紧缩状态下被容纳在内腔7302内。可膨胀球囊7112连同细长膨胀导管主体7300的至少一部分可以在可膨胀球囊7112要被膨胀时从第二端7104延伸。
图7B示出了可以与根据本公开的任何导管(例如,导管300、400、500或600)一起使用的肺动脉导管791的替代示例。与图7A中示出的肺动脉导管791一样,肺动脉导管791包括细长导管主体7100,细长导管主体7100具有第一端7102、第二端7104、外围表面7106和与外围表面7106相对的内表面。内表面限定在细长导管主体7100的第一端7102和第二端7104之间延伸的内腔7110。内腔7110的大小和形状足以在传送导管期间在内腔7110内部容纳导管(例如,导管300、400、500或600)的至少一部分。例如,锚固构件和至少两个细长刺激构件连同细长主体的至少一部分可以定位在内腔7110内(图7B示出的示例具有完全在内腔7110内部的导管(例如,导管300、400、500或600))。锚固构件、至少两个细长刺激构件和细长主体的至少一部分可以在传送和植入导管(例如,导管300、400、500或600)期间从肺动脉导管791的远端7104部署。
图7B中示出的肺动脉导管791包括两个可膨胀球囊7112(在图7B中示出为7112-1和7112-2)。如图所示,可膨胀球囊7112-1和7112-2中的每一个均定位在单独的细长膨胀导管主体7300-1和7300-2上,其中细长膨胀导管主体7300-1和7300-2中的每一个分别穿过球囊内腔7302-1和7302-2。如图所示,每个球囊内腔7302-1和7302-2分别由可以从第一端7102延伸通过细长导管主体7100的第二端7104的内腔面7304-1和7304-2限定。球囊内腔7302-1和7302-2均具有允许细长膨胀导管主体7300-1和7300-2在其相应的球囊内腔7302-1和7302-2内纵向移动的横截面尺寸。这样,可膨胀球囊7112-1和/或7112-2中的每一个可以相对于肺动脉导管791的远端7104独立地移动。与图7A一样,每个球囊内腔7302-1和7302-2的横截面尺寸可以足以允许每个相应的可膨胀球囊7112-1和7112-2在其完全紧缩状态下被容纳在每个相应的球囊内腔7302-1和7302-2内。每个可膨胀球囊7112-1和7112-2连同细长膨胀导管主体7300-1和7300-2的至少一部分可以在可膨胀球囊7112-1和/或7112-2要被膨胀时独立地从第二端7104延伸。
可膨胀球囊7112-1和7112-2中的每一个具有分别带有内表面7116-1和7116-2的球囊壁7114-1和7114-2,内表面7116-1和7116-2连同细长膨胀导管主体7300-1和7300-2的外围表面7106的一部分分别限定流体密封体积7118-1和7118-2。细长膨胀导管主体7300还包括膨胀内腔7120-1和7120-1,膨胀内腔7120-1和7120-1分别延伸通过细长膨胀导管主体7300-1和7300-2,其中膨胀内腔7120-1,7120-2具有进入可膨胀球囊7112-1和7112-2的流体密封体积7118-1,7118-2中的第一开口7122-1,7122-2和在第一开口7122-1,7122-2近端的第二开口7124-1和7124-2,以允许流体(例如,液体或气体)移入和移出流体密封体积7118-1和7118-2以使球囊7112-1和7112-2膨胀和紧缩。可膨胀球囊7112-1和7112-2中的每一个可以相对于细长主体7100的第二端7104独立地移动以及独立地被膨胀,如本文其他地方所述。
肺动脉导管791还包括定位测量仪器752。定位测量仪器752包括具有第一端756和在第一端756远端的缓冲器端758的细长测量仪器主体754。细长测量仪器主体754可以在由延伸通过细长导管主体7100的表面限定的内腔750内纵向移动。细长测量仪器主体754延伸通过细长导管主体7100的内腔75以定位缓冲器端758超出细长导管主体7100的第二端7104。定位测量仪器752的第一端756从细长导管主体7100的第一端7102延伸,其中细长测量仪器主体754包括标记,所述标记指示细长导管主体7100的第二端7104和定位测量仪器752的缓冲器端758之间的长度。
肺动脉导管791还可以包括从细长导管主体7100的外围表面7106侧向延伸的第一锚固件729。如图所示,第一锚固件729具有形成开放框架的支柱731。支柱731具有外围表面733,外围表面733具有允许第一锚固件729(当被部署时)接合主肺动脉和/或肺动脉中的一个或两个的表面的最大外径。当肺动脉导管791和导管(例如,导管300、400、500或600)正被引入到患者中时,护套可以覆盖并将第一锚固件729保持在非部署状态中。
图7A和7B所示的导管系统可以用于将导管(例如,导管300、400、500和/或600)定位在患者的主肺动脉和/或右或左肺动脉中的一个或两个中,例如,如本文所述。为了做到这一点,肺动脉导管791在导管定位在内腔7110内的情况下通过透皮切口被引入到脉管系统中,并且被引导到右心室(例如,使用通过颈部中的切口的斯旺-甘兹氏方法)。对于图7A的导管系统,使球囊7112膨胀(如所描述)以允许肺动脉导管791和导管通过血液的流动从右心室被携带到主肺动脉或右或左肺动脉中的一个中。一旦肺动脉导管791和导管(例如,导管300、400、500和/或600)已经从右心室被携带到主肺动脉或右或左肺动脉中的一个中,就可以缩回护套,从而允许第一锚固件729部署在主肺动脉内。可以通过将护套定位(例如,推进护套)回到第一锚固件729上来使第一锚固件729回到其未部署状态。
在第一锚固件729处于其未部署位置的情况下,定位测量仪器752可以用于确定细长导管主体7100的第二端7104和主肺动脉的顶部(例如,在肺动脉瓣远端并且与右和左肺动脉相邻的位置)之间的长度。直到该长度后,可以将导管(导管300、400、500、600)从细长导管主体7100的内腔7110推进到细长导管主体7100的第二端7104和主肺动脉的顶部之间的位置。可以例如使用从细长导管主体7100的第一端7102向近端延伸的导管的细长主体的一部分上的标记(例如,提供例如以毫米计的长度的标记)来确定该位置。
现在参考图8A至8D,示出了根据本公开的导管800的附加示例。导管800包括具有第一端803和第二端805的细长导管主体801。细长导管主体801还包括外围表面807和限定至少部分地在细长导管主体801的第一端803和第二端805之间延伸的膨胀内腔811(以虚线示出)的内表面809。
导管800包括在细长导管主体801的外围表面807上的可膨胀球囊813。可膨胀球囊813包括具有内表面817的球囊壁815,内表面817连同细长导管主体801的外围表面807的一部分限定流体密封体积819。膨胀内腔811包括进入可膨胀球囊813的流体密封体积819的第一开口821和接近第一开口821的第二开口823以允许流体移入和移出体积819从而使球囊813膨胀和紧缩。
导管800还包括沿着细长导管主体801的外围表面807定位的多个电极825。多个电极825位于可膨胀球囊813和细长导管主体801的第一端803之间。导电元件827延伸通过细长导管主体801,其中导电元件827将电流传导到多个电极825中的两个或更多个的组合。
导管800还包括从细长主体801的外围表面807侧向延伸的第一锚固件829,第一锚固件829具有形成开放框架的支柱831。在所示示例中,支柱831具有外围表面833,外围表面833具有比可膨胀球囊813的最大外尺寸(例如,其最大直径)大的最大外尺寸。如图所示,第一锚固件829具有相对于外围表面833的中心点835,中心点835相对于细长导管主体801相对于外围表面807的中心点837偏心。
图8A和8B示出了第一锚固件829。图8A示出第一锚固件829定位在可膨胀球囊813和沿细长导管主体801的外围表面807定位的多个电极825之间。图8B示出第一锚固件829定位在沿细长导管主体801的外围表面807定位的多个电极825和细长导管主体801的第一端803之间。
对于图8A示出的导管800,细长导管主体801的包括多个电极825的部分839在置于纵向压缩之下时可在预定的径向方向上弯曲。为了取得包括多个电极825的该部分839的弯曲,细长导管主体801可以预加应力和/或壁可以具有在处于纵向压缩下时允许细长导管主体801在预定径向方向上弯曲的厚度。此外或者替代地,例如具有每单位长度不同匝数的线圈或者螺旋丝线的结构可以在部分839中位于细长导管主体801内。一个或多个这些结构可以用来允许纵向压缩,以在部分839中在预定径向方向上产生弯曲。为了获得纵向压缩,第一锚固件829可以部署在患者的脉管系统中(例如,在肺动脉中),其中第一锚固件829提供对抗细长主体801的纵向移动的阻力位置或点。因此,这允许在细长导管主体801中产生足以使得细长导管主体801的部分839(沿着该部分1854存在多个电极825)在预定径向方向上弯曲的压缩力。
图8C提供了当放置在纵向压缩下时,在预定径向方向上弯曲的细长导管主体801的部分839的图示。图8C所示的导管800表示图8A中示出的导管并且在此进行讨论。如图所示,导管800已经被至少部分地定位在患者心脏的主肺动脉8500中(导管800还可以被至少部分地定位在如图所示的右肺动脉8504内),其中球囊813和第一锚固件829位于左肺动脉8502的内腔中。从该位置,施加到细长导管主体801的压缩力可以使细长导管主体801的具有多个电极825的部分839在预定径向方向上弯曲,从而允许(例如导致)多个电极825朝向主肺动脉8500的腔面延伸和/或接触该腔面。根据若干示例,多个电极825被带入主肺动脉8500的位置和/或与主肺动脉8500的腔面接触。
在细长导管主体801的第一端803提供旋转力矩可以帮助相对于腔面移动多个电极825,从而允许专业人员或临床医生沿着主肺动脉8500的腔面将多个电极825“扫”到不同位置。如本文所述,这允许在沿着主肺动脉8500的腔面的各种不同位置处监测和记录患者对于刺激电能量的心脏响应。以这种方式,可以识别沿着主肺动脉8500的腔面定位电极825的优选位置。根据其他示例,根据需要和/或要求,多个电极825可以被带入左肺动脉8502或右肺动脉8504的位置或其他位置或者与左肺动脉8502或右肺动脉8504或其他位置处的腔面接触。
替代地,对于图8B所示的导管800,细长导管主体801可以包括限定从第一端803朝向第二端805延伸的成形内腔843的第二内表面841。图8B的导管800还可以包括具有第一端847和第二端849的成形丝线845。在一个示例中,成形内腔843具有足以允许成形丝线845穿过成形内腔843的大小(例如直径),其中成形丝线845的第一端847在细长导管主体801的第一端803的近端并且成形丝线845的第二端849连接到细长导管主体801,以使得当将张力施加到成形丝线845时成形丝线845将弯曲赋予到细长导管主体801的具有多个电极825的部分839中。
图8D提供了当使用本文讨论的成形内腔和成形丝线时在预定径向方向上弯曲的细长导管主体801的部分839的图示(图8D中示出的导管800是图8B中所示的导管并且在此进行描述)。如图所示,导管800已经至少部分被定位在患者心脏的主肺动脉8500中,其中球囊813位于左肺动脉8502的内腔中并且第一锚固件829位于主肺动脉8500中。从该位置,当张力被施加到成形丝线845时,成形丝线845可以用于将弯曲赋予到细长导管主体801的具有多个电极825的部分839中,从而允许(例如导致)多个电极825朝向主肺动脉8500的腔面延伸和/或接触该腔面(导管800也可以至少部分地被定位在如图所示的右肺动脉8504中)。根据若干示例,多个电极825被带入主肺动脉的位置和/或与主肺动脉的腔面接触。根据其他示例,根据需要和/或要求,多个电极825可以被带入左肺动脉8502或右肺动脉8504的位置或其他位置或者与左肺动脉8502或右肺动脉8504或其他位置处的腔面接触。
在细长导管主体801的第一端803提供旋转力矩可以帮助相对于主肺动脉8500(和/或右或左肺动脉)的腔面移动多个电极825,从而允许专业人员或临床医生沿着主肺动脉8500(和/或右或左肺动脉)的腔面将多个电极825“扫”到不同位置,如本文所述,以便识别沿着主肺动脉(和/或右或左肺动脉)的腔面定位电极825的优选位置。
如图所示,图8A和8B的导管800都包括具有在细长主体801的外围表面807上延伸的内腔853的细长递送护套851。细长递送护套851在第一位置中可以具有定位在细长递送护套851的内腔853内的第一锚固件829。当细长递送护套851相对于细长主体801的外围表面807移动时,第一锚固件829从细长主体801的外围表面807延伸。
现在参考图9,示出了导管900的附加示例。如针对导管800所描述,导管900包括细长导管主体901,细长导管主体901具有第一端903和第二端905、外围表面907和限定膨胀内腔911的内表面909,膨胀内腔911至少部分地在细长导管主体901的第一端903和第二端905之间延伸。导管900包括在细长导管主体901的外围表面907上的可膨胀球囊913,可膨胀球囊913具有球囊壁915,球囊壁915具有内表面917,内表面917连同细长导管主体901的外围表面907的一部分限定流体密封体积919。膨胀内腔911包括进入可膨胀球囊913的流体密封体积919的第一开口921和接近第一开口921的第二开口923以允许流体(例如液体或气体)移入和移出体积919从而使球囊913膨胀和紧缩。
导管900包括沿着细长导管主体901的外围表面907定位的多个电极925。如图所示,多个电极925位于可膨胀球囊913和细长导管主体901的第一端903之间。导电元件927延伸通过细长导管主体901,其中导电元件927将电流传导到多个电极925中的一个或多个的组合。
导管900还包括第一锚固件929和第二锚固件955,第一锚固件929和第二锚固件955都从细长主体901的外围表面907侧向延伸。第一锚固件929和第二锚固件955都具有形成用于锚固件的开放框架的支柱931。支柱931具有外围表面933,外围表面933具有比可膨胀球囊913的最大外尺寸(例如,其最大直径)大的最大外尺寸。如图所示,第一锚固件929具有相对于外围表面933的中心点935,中心点935相对于细长导管主体901相对于外围表面907的中心点937偏心。与此相比,第二锚固件955具有相对于外围表面933的中心点935,中心点935相对于细长导管主体901相对于外围表面907的中心点937同心。在一些示例中,第一锚固件929可以具有相对于外围表面933的中心点935,中心点935相对于细长导管主体901相对于外围表面907的中心点937同心,和/或第二锚固件955可以具有相对于外围表面933的中心点935,中心点935相对于细长导管主体901相对于外围表面907的中心点937偏心。
导管900包括具有在细长主体901的外围表面907上延伸的内腔953的细长递送护套951。细长递送护套951在第一位置中可以具有定位在细长递送护套951的内腔953内的第一锚固件929和第二锚固件955。当细长递送护套951相对于细长主体901的外围表面907移动时,第一锚固件929从细长主体901的外围表面907延伸。当细长递送护套951相对于外围表面907进一步远离可膨胀球囊913移动时,第二锚固件955从细长主体901的外围表面907延伸。
如图所示,多个电极925位于第一锚固件929和第二锚固件955之间。可以以各种不同方式使得细长导管主体901的包括多个电极925的部分939在预定的径向方向上弯曲。例如,可以使得细长导管主体901的包括多个电极925的部分939在被置于纵向压缩之下时在预定的径向方向上弯曲(如本文所述)。像导管800一样,为了导致包括多个电极925的部分939弯曲,细长导管主体901可以预加应力和/或壁可以具有在被放置在纵向压缩下时允许细长导管主体901在预定径向方向上弯曲的厚度。此外或者替代地,例如具有每单位长度不同匝数的螺旋丝线的线圈的结构可以在部分939中位于细长导管主体901内。一个或多个这些结构可以用来允许纵向压缩,以在部分939中在预定径向方向上产生弯曲。
为了获得纵向压缩,第一锚固件929可以部署在患者的脉管系统中(如本文所述),其中第一锚固件929提供对抗细长主体901的纵向移动的阻力位置或点。如本文所述,例如,这可以通过相对于细长主体901的外围表面907移动细长递送护套951以便允许第一锚固件929从细长主体901的外围表面907延伸来实现。一旦被部署,第一锚固件929就允许在细长导管主体901中产生足以使得细长导管主体901的部分939(沿着该部分1854存在多个电极925)在预定径向方向上弯曲的压缩力。一旦在预定径向方向上形成弯曲,相对于外围表面907进一步远离可膨胀球囊913移动细长递送护套951以便允许第二锚固件955从细长主体901的外围表面907延伸。
替代地,导管900的细长导管主体901可以包括限定从第一端903朝向第二端905延伸的成形内腔943的第二内表面941。导管900还可以包括具有第一端947和第二端949的成形丝线945,其中成形内腔943具有足以允许成形丝线945穿过成形内腔943的大小(例如直径),其中成形丝线945的第一端947在细长导管主体901的第一端903的近端并且成形丝线945的第二端949连接到细长导管主体901,以使得当将张力施加到成形丝线945时成形丝线945将弯曲赋予到细长导管主体901的具有多个电极925的部分939中。
现在参考图10,示出了导管1000的附加示例。如上所述,导管1000包括细长导管主体1001,细长导管主体1001具有第一端1003、第二端1005、外围表面1007和限定膨胀内腔1011的内表面1009,膨胀内腔1011至少部分地在细长导管主体1001的第一端1003和第二端1005之间延伸。导管1000还包括在细长导管主体1001的外围表面1007上的可膨胀球囊1013,其中可膨胀球囊1013具有球囊壁1015,球囊壁1015具有内表面1017,内表面1017连同细长导管主体1001的外围表面1007的一部分限定流体密封体积1019。膨胀内腔1011包括进入可膨胀球囊1015的流体密封体积1019的第一开口1021和接近第一开口1021的第二开口1023以允许流体移入和移出体积1019从而使球囊1015膨胀和紧缩。
细长导管主体1001还包括可以从细长导管主体1001的外围表面1007侧向延伸的第一锚固件1029。如本文所述,第一锚固件1029包括形成具有外围表面1033的开放框架的支柱1031,外围表面1033具有比可膨胀球囊1013的最大外尺寸(例如,其最大直径)大的最大外尺寸。如图所示,第一锚固件1029具有相对于外围表面1033的中心点1035,中心点1035相对于细长导管主体1001相对于外围表面1007的中心点1037偏心。
导管1000还包括具有电极细长主体1059和沿着电极细长主体1059的外围表面1061定位的多个电极1025的电极导管1057。导电元件1063延伸通过电极导管1057的电极细长主体1059和/或沿着电极导管1057的电极细长主体1059延伸,其中导电元件1063将电流传导到多个电极1025中的一个或多个的组合。如图所示,第一锚固件1029定位在可膨胀球囊1013和沿电极细长主体1059的外围表面定位的多个电极1025之间。
导管1000还包括附接环1065,其连接到电极导管1057并且在第一锚固件1029和可膨胀球囊1013远端定位在细长导管主体1001的外围表面1061周围。在一种示例中,附接环1065将电极导管1057的远端1067以静态关系保持到细长导管主体1001。从该位置,可以使得电极细长主体1059的包括多个电极1025的部分1039在预定的径向方向上弯曲,如先前所述。发生弯曲的电极细长主体1059的包括多个电极1025的部分1039的配置可以具有本文所述配置和弯曲机构中的任一个。
图10还示出了具有在细长导管主体1001和电极导管1057的外围表面上延伸的内腔1053的细长递送护套1051。细长递送护套1051在第一位置中可以具有定位在细长递送护套1051的内腔1053内的第一锚固件1029。当细长递送护套1051相对于细长主体1001的外围表面1007和电极导管1057的外围表面1061移动时,第一锚固件1029从(例如,远离)细长主体1001的外围表面1007延伸。
现在参考图11,示出两个根据公开的示例的导管系统1169。导管系统1169包括细长导管主体1102,细长导管主体1102具有第一端1104、第二端1106、外围表面1176和限定膨胀内腔1194的内表面1184,膨胀内腔1194至少部分地在细长导管主体1002的第一端1104和第二端1106之间延伸。细长导管主体1102包括由第一平面1110和与第一平面1110垂直的第二平面1112的交线限定的细长径向轴线1108,其中细长径向轴线1108延伸通过细长导管主体1102的第一端1104和第二端1108。
导管系统1169还包括在细长导管主体1102的外围表面1176上的可膨胀球囊1178。可膨胀球囊1178具有带有内表面1190的球囊壁1188,内表面1190连同细长导管主体1102的外围表面1176的一部分限定流体密封体积1192。膨胀内腔1194包括进入可膨胀球囊1178的流体密封体积1192的第一开口1196和接近第一开口1196的第二开口1198以允许流体移入和移出体积1192从而使球囊1178膨胀和紧缩。
导管系统1169还包括电极保持架11690,电极保持架11690具有径向远离细长导管主体1102的外围表面1176朝向可膨胀球囊1178延伸的两个或更多个肋部1171。如图所示,电极保持架11690的每个肋部1171具有远离细长导管主体1101朝向可膨胀球囊1178延伸的第一端11692。电极保持架11690的肋部1171的第一端11692中的每一个相对于肋部1171的每个其他第一端彼此远离。此外,电极保持架1169的肋部1171弯曲到第一平面1110的第一半部1116中。电极保持架1169的每个肋部1171还包括一个或多个电极1125。每个肋部1171上的一个或多个电极1125形成第一平面1110的第一半部1116上的电极阵列。导管系统1169还包括延伸通过电极保持架1169的肋部1171和细长导管主体1101和/或沿着电极保持架1169的肋部1171和细长导管主体1101延伸的导电元件1120,其中导电元件1120将电流传导到电极阵列中的一个或多个电极1125的组合。
导管系统1169还包括锚固保持架1173,锚固保持架1173具有径向远离细长导管主体1101的外围表面1176朝向可膨胀球囊1178延伸的两个或更多个肋部1171。如图所述,锚固保持架1173的两个或更多个肋部1171弯曲到第一平面1110的第二半部1134中。在所示示例中,锚固保持架1173的两个或更多个肋部1171不包括任何电极。在一些示例中,锚固保持架1173的两个或更多个肋部1171包括一个或多个电极。
导管系统1169还可以包括在细长导管主体1101的外围表面1176上的第二可膨胀球囊。例如,细长导管主体1101还可以包括第三端和限定第二膨胀内腔的第二内表面,所述第二膨胀内腔至少部分地在细长导管主体1101的第一端和第三端之间延伸。第二可膨胀球囊可以位于邻近细长导管主体1101的第三端的细长导管主体1101的外围表面1176上。与第一可膨胀球囊1178一样,第二可膨胀球囊可以包括具有内表面的球囊壁,该内表面连同细长导管主体的外围表面的一部分限定流体密封体积。第二膨胀内腔可以包括进入第二可膨胀球囊的流体密封体积的第一开口和接近第一开口的第二开口以允许流体移入和移出体积从而使第二球囊膨胀和紧缩。
图11还示出了具有在细长导管主体1101的外围表面和电极保持架1169及锚固保持架1173二者的肋部1171上延伸的内腔1153的细长递送护套1151。细长递送护套1151在第一位置中可以具有在细长递送护套1151的内腔1153内的电极保持架1169及锚固保持架1173二者的肋部1171。当细长递送护套1151相对于细长主体1101的外围表面1107移动时,电极保持架1169的肋部1171从细长主体1101延伸以弯曲到第一平面1110的第一半部1116中并且锚固保持架1173的肋部1171从细长主体1101延伸以弯曲到第一平面1110的第二半部1134中。
现在参考图12A,示出了导管1200的示例的透视图。导管1200包括具有第一端1204和在第一端1204远端的第二端1206的细长主体1202。如图所示,细长主体1202包括在细长主体1202的第一端1204和第二端1206之间延伸的纵向中心轴线1208。细长主体1202还包括具有限定垂直于纵向中心轴线1208截取的凸多边形横截面形状的三个或更多个表面1212的部分1210。
当在本文中使用时,细长主体1202的凸多边形横截面形状包括其每个内角都小于180度并且其中形状的两个顶点之间的每个部段保持在形状内部或边界上的那些形状。这样的形状的示例尤其包括但不限于三角形、矩形(如图12A所示)、正方形、五边形和六边形。
如图所示,导管1200包括在细长主体1202的三个或更多个表面1212中的一个表面上的一个或多个(例如,两个或更多个)电极1214。导电元件1216延伸通过细长主体1202和/或沿着细长主体1202延伸,其中导电元件1216可以例如本文所述用于将电流传导到一个或多个电极1214的组合。一个或多个电极1214中的每一个耦接到对应的导电元件1216。在一些示例中,导电元件1216彼此电隔离,并且从每个相应的电极1214通过细长主体1202的第一端1204延伸通过细长主体1202和/或沿着细长主体1202延伸。导电元件1216可以终止于连接器端口处,其中每个导电元件1216能够可释放地耦接到刺激系统,例如,本文所述的刺激系统。在一些示例中,导电元件1216永久地耦接到刺激系统(例如,不可释放地耦接)。刺激系统可以用于提供刺激电能量,刺激电能量通过导电元件1216传导并在一个或多个阵列1214的组合上传递。一个或多个电极1214可以彼此电隔离,并且细长主体1202可以由本文所述的电绝缘材料形成。如图所示,根据一个示例,一个或多个电极1214仅位于细长主体1202的三个或更多个表面1212中的一个表面上。
在细长主体1202的三个或更多个表面1212中的一个表面上可以存在各种数量和配置的一个或多个电极1214。例如,一个或多个电极1214可以被配置为电极阵列,其中电极的数量和他们相对于彼此的相对位置可以根据期望的植入(例如,部署或目标)位置而变化。如本文所述,一个或多个电极1214可以被配置为允许电流从和/或在一个或多个电极1214的不同组合之间传输。因此,例如,电极阵列中的电极可以具有其中电极彼此均等间隔的重复图案。例如,电极阵列中的电极可以具有列和行配置(如图12所示)。替代地,电极阵列中的电极可以同心径向图案,其中电极被定位成形成电极的同心环。其他图案也是可能的,其中这样的图案可以是重复图案或随机图案。
如图所示,一个或多个电极1214具有暴露面1218。与面对动脉或其他血管、内腔或器官中的血液的体积不同,电极1214的暴露面1218为电极1214提供了当被植入(临时地或持续长期的持续时间段)在患者中时被放置成与患者的(例如,右或左肺动脉的)血管组织接近和/或与其接触的机会。当一个或多个电极1214位于细长主体1202的三个或更多个表面1212中的一个表面上时,电极1214可以被放置成与主肺动脉、左肺动脉和/或右肺动脉的任何组合的组织直接接近和/或接触。
通过使一个或多个电极1214位于三个或更多个表面1212中的一个表面上,电极的暴露面1218可以被定位在患者的脉管系统内部以面对和/或接触主肺动脉、左肺动脉和/或右肺动脉的组织。当一个或多个电极1214与患者的脉管系统的腔面接触时,一个或多个电极1214将背离肺动脉的该区域的血液体积指向,从而允许来自一个或多个电极1214的电脉冲被引导到与植入位置相邻的组织中,而不是被引导到血液体积中。
一个或多个电极1214的暴露面1218可以具有各种不同形状。例如,暴露面1218可以具有平坦的平面形状。在该示例中,电极1214的暴露面1218可以与细长主体1202的三个或更多个表面1212中的一个表面共面。在替代示例中,电极1214的暴露面1218可以具有半-半球形形状。电极1214的暴露面1218的其他形状可以包括半圆柱形、波浪形或之字形。电极1214的暴露面1218还可以包括一个或多个锚固件结构。这样的锚固件结构的示例包括可以可选地包括倒钩的钩子。类似地,可以将电极1214成形为充当锚固件结构。
在一种示例中,包括一个或多个电极1214的暴露面1218的细长主体1102的三个或更多个表面1112中的一个表面还可以包括在三个或更多个表面1212中的一个表面上方延伸的锚固件结构1220。如图所示,锚固件结构1220可以包括能够以一个或多个电极1214在它们接触血管组织的位置的移动被减小(例如,被最小化)的方式接触血管组织的一些部分。锚固件结构1220可以具有可以有助于实现该目的的各种不同形状。例如,锚固件结构1220可以具有圆锥形形状,其中圆锥形形状的顶点可以接触血管组织。在一种示例中,锚固件结构1220具有钩子配置(具有或不具有倒钩)。在附加示例中,锚固件结构1220中的一个或多个可以被配置为电极。
如图所示,导管1200的细长主体1202还可以包括具有垂直于纵向中心轴线1208截取的圆形横截面形状的部分1222。导管1200的细长主体1202还包括限定延伸通过细长主体1202的导丝内腔1226的表面1224。导丝内腔1226可以具有充分大以允许导丝自由地穿过导丝内腔1226的直径。导丝内腔1226可以相对于细长主体1202的纵向中心轴线1208同心地定位。
替代地,并且如图12A所示,导丝内腔126可以相对于细长主体1202的纵向中心轴线1208偏心地定位。当导丝内腔1226相对于纵向中心轴线1208同心地定位时,导丝内腔1226具有垂直于纵向中心轴线截取的比导管的其余部分垂直于纵向中心轴线截取的壁厚度1230大的壁厚度1228。对于这种配置,壁厚度1228和1230的差有助于向细长主体1202提供进行屈曲的优先方向。例如,根据若干示例,细长主体1202的比壁厚度1230大的壁厚度1228使得当细长主体1102屈曲时,细长主体1202的具有更大壁厚度的一侧优先具有更大的曲率半径。通过将一个或多个电极1214的暴露面1218定位在细长主体1202的具有更大壁厚度(例如,壁厚度1228)的一侧上,可以使一个或多个电极1214更容易且更能预测地与在主肺动脉和右和左肺动脉中的至少一个中或周围的脉管系统的腔面接触。
图12A所示的导管1200可以被定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中,例如,如本文所述。为了做到这一点,肺动脉导管引导导管通过透皮切口被引入脉管系统中并使用已知技术被引导到右心室。例如,肺动脉导管引导导管可以经由手臂的外周静脉(例如,像外周地插入的中心导管一样)、经由颈部或胸部的外周静脉(例如,像斯旺-甘兹氏导管方法一样)或经由腿部静脉(例如,股静脉)而被插入到脉管系统中。其他方法包括但不限于颈内静脉方法。患者的来自脉管系统的心电图和/或压力信号的变化可以用来将肺动脉引导导管引导和定位在患者的心脏内。一旦在合适位置,就可以将导丝经由肺动脉引导导管导引入到患者中,其中导丝被推进到主肺动脉和/或肺动脉(例如,左和右肺动脉)中的一个中。使用导丝内腔1226就,可以通过导丝推进导管1200以将导管1200定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中,例如,如本文所述。各种成像医疗器械可以用来将本公开的导丝定位于患者的主肺动脉和/或左和右肺动脉中的一个中。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
使用刺激系统(例如本文所述的刺激系统),可以在电极1214中的一个或多个的组合上传输刺激电能量(例如,电流或脉冲)。根据本文所述的若干示例,可以监测和记录患者对于刺激电能量的心脏响应,以与其他后续测试进行比较。可以理解对于本文所述的任何导管,电极(包括定位在患者身体内或上的参考电极(如本文所述))的任何组合都可以用于向受试者(例如,患者)提供刺激和感测来自受试者的心脏信号。
图12B示出了导管1200的另一示例。导管1200包括在上面讨论的特征和部件,不再重复对其的讨论,但是在图12B中包含元件编号,可以理解对这些元件的讨论是隐含的。此外,导管1200的细长主体1202包括接近一个或多个电极1214的蜿蜒部分1232。当被植入(例如,部署)在患者的脉管系统中时,细长主体1202的蜿蜒部分1232可以充当“弹簧”以吸收并且将一个或多个电极1214的移动与导管1200的细长主体1202的其余部分隔离。除了具有蜿蜒形状之外,蜿蜒部分1232可以具有线圈状配置。还可以根据需要和/或需求来使用取得一旦被植入就吸收并且将一个或多个电极1214的移动与导管1200的细长主体1202的其余部分隔离的目的的其他形状。在递送导管1200期间,在导丝内腔1226内存在导丝可以有助于暂时拉直细长主体1202的蜿蜒部分1232。
现在参考图12C,示出了本文提供的导管1200的附加示例。导管1200可以包括在上面针对关于图12A和12B中描述的导管所讨论的特征和部件,不再重复对其的讨论,但是在图12C中包含元件编号,可以理解对这些元件的讨论是隐含的。此外,本示例的导管1200包括可膨胀球囊1234。如图所示,细长主体1202包括外围表面1236,其中可膨胀球囊1234位于细长主体1202的外围表面1236上。可膨胀球囊1234包括具有内表面1240的球囊壁1238,内表面1240连同细长主体1202的外围表面1236的一部分1242限定流体密封体积1244。
细长主体1202还包括限定延伸通过细长主体1202的膨胀内腔1246的表面1245。膨胀内腔1246包括进入可膨胀球囊1234的流体密封体积1244的第一开口1248和接近第一开口1248的第二开口1250以允许流体移入和移出流体密封体积1244从而使球囊1234膨胀和紧缩。包含流体(例如,盐水或气体(例如氧气))的注射器或其他已知装置可以用于使球囊334膨胀和紧缩。
图12C所示的导管1200可以被定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中,例如,如本文所述。如本文所述,肺动脉导管引导导管通过透皮切口被引入脉管系统中并被引导到右心室。一旦处于适当位置,就可以根据所描述的方式使球囊1234膨胀,以允许导管1200通过血液的流动从右心室被携带到主肺动脉和/或肺动脉中的一个。附加地,各种成像医疗器械可以用来将本公开的导管定位于患者的主肺动脉和/或肺动脉中的一个中。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
导管1200可以沿着主肺动脉推进直到导管1200的第二端1206接触主肺动脉的顶部(例如,在肺动脉瓣远端并且与两个肺动脉相邻的位置)。一旦导管1200的第二端1206到达主肺动脉的顶部,就可以使肺动脉引导导管相对于导管1200移动以便从肺动脉引导导管部署导管1200。
在导管主体1202的外围表面上可以存在标记,其中标记从第二端1202开始并且从第二端1202朝向导管主体1202的第二端1206延伸。标记之间的距离可以具有几个单位(例如,毫米、英寸等),这可以允许确定导管1200的第二端1206和主肺动脉的顶部之间的长度。
测量距离主肺动脉的顶部的该距离的能力可以有助于将一个或多个电极1214放置在期望位置中(例如,在主肺动脉的内的位置处)。除了测量距离主肺动脉的顶部的从其放置细长主体1202的第二端1206的距离之外,细长主体1202还可以用于识别或映射一个或多个电极1214在脉管系统内的最优位置。例如,使用导管主体1202的外围表面上的标记,细长主体1202的第二端1206可以被定位在距离主肺动脉的顶部的期望距离处。
使用刺激系统(例如本文所述的刺激系统),可以在一个或多个电极1214的组合上传输刺激电能量(例如,电流或电脉冲)。可以监测和记录患者对于刺激电能量的心脏响应,以与其他后续测试进行比较。可以理解对于本文所述的任何导管,电极(包括定位在患者身体内或上的参考电极(如本文所述))的任何组合都可以用于向患者提供刺激和感测来自患者的心脏信号。
现在参考图12D,示出了导管1200的附加示例。导管1200可以包括像在上面关于图12A-12BC所讨论的导管的特征和部件,不再重复对其的讨论,但是在图12D中包含元件编号,可以理解对这些元件的讨论是隐含的。此外,本示例的导管1200包括限定偏转内腔1254的表面1252。偏转内腔1254包括在细长主体1202中的第一开口1256和第二开口1258。在一种示例中,第二开口1258与细长主体1202的三个或更多个表面1212中的一个表面上的一个或多个电极1214相对。
导管1200还包括细长偏转构件1260。细长偏转构件1260包括具有第一端1263和第二端1265的细长主体1261。细长偏转构件1260延伸通过第一开口1256到偏转内腔1254的第二开口1258。偏转内腔1254具有足以允许偏转构件1260穿过偏转内腔1254的大小(例如,直径),其中偏转构件1260的第一端1263接近细长主体1202的第一端1204并且偏转构件1260的第二端1265可从偏转内腔1254的第二开口1258延伸。从偏转构件1260的第一端1263施加的压力可以使偏转构件1260在偏转内腔1254内移动。例如,当向偏转构件1260施加压力以使偏转构件1260的第一端1263朝向偏转内腔1254的第一开口1256移动时,压力使偏转构件1260的第二端1265从第二开口1258延伸。
如大致示出的,细长偏转构件1260可以被推进通过偏转内腔1254以使得细长偏转构件1260远离细长主体1202的三个或更多个表面1212中的一个表面上的一个或多个电极1214侧向延伸。细长偏转构件1260可以具有允许细长偏转构件1260被延伸足以使一个或多个电极1214借助各种不同压力与血内腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触的距离的长度和形状。可选地,细长偏转构件1260可以被配置为包括一个或多个电极1214,例如,如本文所述。
对于各种示例,偏转构件1260的细长主体1261由柔性聚合物材料形成。这样的柔性聚合物材料的示例包括但不限于:医用级聚氨酯,尤其是例如,基于聚酯的聚氨酯、基于聚醚的聚氨酯和基于碳酸酯的聚氨酯;聚酰胺、聚酰胺嵌段共聚物、聚烯烃(例如,聚乙烯(例如,高密度聚乙烯));以及聚酰亚胺。
在一种示例中,细长偏转构件1260的细长主体1261还包括一个或多个支撑丝线。支撑丝线可以包围在细长主体1261的柔性聚合物材料中,其中支撑丝线可以有助于向细长偏转构件1260提供列强度和预定形状。例如,支撑丝线可以具有沿着细长主体1261的长度纵向延伸的线圈形状。根据若干示例,线圈形状有利地允许施加在偏转构件1260的第一端1263处或附近的纵向力被传递通过细长主体1261从而从偏转内腔1254的第二开口1258侧向延伸偏转构件1260的第二端1265。
支撑丝线还可以在从偏转内腔1254的第二开口1258侧向延伸后给偏转构件1260提供预定形状。所述预定形状可以被确定为接合肺动脉的内腔壁以便使电极1214与血管组织接触。所述预定形状和支撑丝线还可以有助于向偏转构件1260赋予在位于受试者(例如,患者)的脉管系统内的状况下足以将电极1214保持在肺动脉的内腔壁上的硬度。支撑丝线566可以由各种不同金属或金属合金形成。这样的金属或金属合金的示例包括手术级不锈钢,例如尤其是奥氏体316不锈钢和以镍钛诺(Nitinol)为人所知的镍钛合金。根据需要和/或需求可以使用其他金属和/或金属合金。
图12D所示的导管1200可以被定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中,例如,如本文所述。根据若干方法,肺动脉导管引导导管通过透皮切口被引入脉管系统中并被引导到右心室(例如,使用斯旺-甘兹氏导管插入方法)。一旦处于适当位置,就可以根据所描述的方式使球囊1234膨胀,以允许导管1200通过血液的流动从右心室被携带到主肺动脉和/或右和左肺动脉中的一个。附加地,各种成像医疗器械可以用来将导管定位于患者的主肺动脉和/或右和左肺动脉中的一个中。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
导管1200可以沿着主肺动脉推进直到导管1200的第二端1206接触主肺动脉的顶部(例如,在肺动脉瓣远端并且与两个肺动脉相邻的位置)。一旦导管1200的第二端1206到达主肺动脉的顶部,就可以使肺动脉引导导管相对于导管1200移动以便从肺动脉引导导管部署导管1200。
在细长主体1202的外围表面上可以存在如本文所述的标记,其可以帮助将导管1200定位在主肺动脉内。测量距离主肺动脉的顶部的该距离的能力可以有助于将一个或多个电极1214放置在期望位置(例如,在主肺动脉的内的位置)中。除了测量距离主肺动脉的顶部的从其放置细长主体1202的第二端1206的距离之外,细长主体1202还可以用于识别或映射一个或多个电极1214在脉管系统内的最优位置。例如,使用导管主体1202的外围表面上的标记,细长主体1202的第二端1206可以被定位在距离主肺动脉的顶部的期望距离处。
当期望时,可以使细长偏转构件1260从细长主体1202侧向延伸到足以使得细长主体1202的具有一个或多个电极1202的三个或更多个表面1212中的一个表面接触主肺动脉的表面(例如,主肺动脉的前表面)的长度,从而使一个或多个电极1214与主肺动脉或肺动脉中的一个(左肺动脉或右肺动脉)接触。将可以理解,细长偏转构件1260偏置并且帮助沿着血管表面(例如,沿着主肺动脉或肺动脉中的一个(左肺动脉或右肺动脉))放置一个或多个电极1214。
归因于其可调整性质(例如,多大压力被施加到细长偏转构件1260),细长偏转构件1260可以用于借助各种不同压力使一个或多个电极1214与主肺动脉或肺动脉中的一个的腔面接触。因此,例如,细长偏转构件1260可以借助第一压力使一个或多个电极1214与主肺动脉或肺动脉中的一个的腔面接触。使用刺激系统(例如本文所述的刺激系统),可以在电极阵列中的一个或多个电极1214的组合上传输刺激电能量(例如,电流或电脉冲)。可以监测和记录患者对于刺激电能量的心脏响应,以与其他后续测试进行比较。
可以理解对于本文所述的任何导管,电极(包括定位在患者身体内或上的参考电极(如本文所述))的任何组合都可以用于向患者提供刺激和感测来自患者的心脏信号。
如果需要,可以改变细长偏转构件1260从细长主体1202侧向延伸的距离(例如,使其更短)以允许细长主体1202在顺时针或逆时针方向上旋转,从而重新定位一个或多个电极1214与主肺动脉或肺动脉中的一个的腔面接触。刺激系统可以再次用于在电极阵列中的电极1214中的一个或多个的组合上传输刺激电能量。然后可以监测和记录患者对于该后续测试的心脏响应以与先前和后续测试进行比较。以这种方式,可以识别沿着主肺动脉或左或右肺动脉中的一个的腔面定位一个或多个电极1214的优选位置。一旦被识别,就可以使用细长偏转构件1260来增加施加到一个或多个电极的侧向压力,从而帮助更好地将导管1200锚固在患者中。
图13提供了定位于受试者(例如,患者)心脏200中的导管1330的透视图,其中电极1344中的一个或多个接触例如右肺动脉206的后表面221和/或上表面223。图13还示出了在分支点207上方的位置处接触右肺动脉208的后表面221和/或上表面223的一个或多个电极1344。图13还示出了将导管1330的至少一部分定位成与限定分支点207的表面的一部分接触。
如图所示,肺动脉干具有在平面1358上截取的直径1356,该平面1358垂直于左侧向平面220和右侧向平面216。在一个示例中,导管1330的电极阵列定位于区域1360中,区域1360在远端延伸不超过肺动脉干202的直径的大约三倍,直到分支点207的右侧。该区域1360在图13中以剖面阴影线示出。
右肺动脉206还可以包括分支点1362,分支点1362将右肺动脉206分成至少两个附加动脉1364,附加动脉1364在限定左肺动脉208和右肺动脉206的分支点207的远端。如图所示,电极阵列可以定位于限定左肺动脉208和右肺动脉206的分支点207和将右肺动脉206分成至少两个附加动脉1364的分支点1362之间。
一旦就位,就可以将电流提供到电极1344中的一个或多个或从电极1344中的一个或多个提供电流。使用第一传感器1352,可以响应于来自电极1344中的一个或多个或到电极1344中的一个或多个的电流来测量患者的非心脏参数的值。根据非心脏参数的值,可以对哪些一个或多个电极被用于响应于心脏参数的值提供电流进行改变。还可以对响应于非心脏参数的值而提供的电流的性质进行改变。举例来说,这样的改变包括但不限于电压、安培数、波形、频率和脉冲宽度的改变。还可以的是,改变所使用的电极的组合以及由电极提供的电流的性质。此外,可以响应于非心脏参数的一个或多个值来移动右肺动脉206的后表面上的一个或多个电极中的电极。这样的心脏参数的例子包括但不限于测量患者心脏的压力参数、声学参数、加速度参数和/或电参数(例如,ECG)作为心脏参数。这样的压力参数的示例可以包括但不限于测量患者心脏的最大收缩压作为压力参数。本文讨论的其他合适的心脏参数。
响应于心脏参数的一个或多个值来移动右肺动脉206的后表面和/或上表面上的一个或多个电极中的电极可以通过以下来完成:物理地将导管1330的一个或多个电极移动到右肺动脉206的后表面和/或上表面上的不同位置、电子地移动一个或多个电极中的哪些电极要被用于从电极阵列提供电流或向电极阵列提供电流(而不物理地移动导管1330的一个或多个电极)或这两个动作的组合。
如本文所述,根据本公开的神经调节可以通过向右肺动脉206施加电流来实现。优选地,本公开的神经调节包括施加电流到右肺动脉206的后和/或上壁。更优选地,本公开的神经调节包括将电流施加到右肺动脉206的前壁和/或上壁。从而,将电流施加到右肺动脉206周围的自主心肺神经。这些自主心肺神经可以包括右自主心肺神经和左自主心肺神经。右自主心肺神经包括右背侧中间心肺神经和右背侧侧向心肺神经。左自主心肺神经包括左腹侧心肺神经、左背侧中间心肺神经、左背侧侧向心肺神经以及左星状心肺神经。
如图13所述并且参考图13所讨论,导管的一个或多个电极接触右肺动脉206的后表面。从该位置,通过一个或多个电极传输的电流可以更好地能够对经历多种心血管医学症状(例如,急性心力衰竭)的患者进行治疗和/或提供治疗(包括辅助治疗)。电流可以从自主神经系统引起反应,这可以帮助调节患者的心脏收缩性和/松弛性。电流的意图是影响心脏收缩性和/松弛性超过心率,从而帮助改善血流动力学控制同时可以最小化不希望的系统性效应。
现在参考图14A,示出了导管1462的附加示例。导管1462包括具有外围表面1436和在第一端1404和第二端1406之间延伸的纵向中心轴线1408的细长主体1402。导管1462可以包括在上面针对导管100、200、300和/或400所讨论的特征和部件,不再重复对其的讨论,但是在图14A中包含元件编号,可以理解对这些元件的讨论是隐含的。
本示例的导管1462包括可膨胀球囊1434。如图所示,细长主体1402包括外围表面1436,其中可膨胀球囊1434位于细长主体1402的外围表面1436上。可膨胀球囊1434包括具有内表面1440的球囊壁1438,内表面1440连同细长主体1402的外围表面1436的一部分1442限定流体密封体积1444。
细长主体1402还包括限定延伸通过细长主体1402的膨胀内腔1446的表面1445。膨胀内腔1446包括进入可膨胀球囊1434的流体密封体积1444的第一开口1448和接近第一开口1448的第二开口1450以允许流体移入流体密封体积1444从而使球囊1434膨胀和紧缩。包含流体(例如,盐水或气体(例如氧气))的注射器或其他已知装置可以用于使球囊1434膨胀和紧缩。
细长主体1402还包括由沿着纵向中心轴线1408的一系列预定弯曲限定的偏移区域1464。当在本文中使用时,“预定弯曲”是在生产导管1462期间在细长主体1462中形成的弯曲,其中当使这样的弯曲变形时提供类似弹簧的力以返回到其预变形形状(例如,其初始形状)。如图所示,一系列预定弯曲包括第一部分1466,第一部分1466具有在纵向中心轴线1408上的第一弯曲1468,第一弯曲1468之后是在细长主体1402的纵向中心轴线1408上的第二弯曲1470。第一弯曲1468和第二弯曲1470中的每一个的长度和弯曲度连同这样的弯曲之间的距离限定偏移区域1464的高度如本文所述,偏移区域1464的高度可以由沿着主肺动脉和/或右和左肺动脉中的一个的一个或多个位置的内径来确定。
细长主体1402的第一部分1466之后是细长主体1402的第二部分1472。沿着第二部分1472的纵向中心轴线1408可以具有零曲率(例如,直线),如图14A所示。细长主体1402的第二部分1472之后是细长主体1402的第三部分1474。纵向中心轴线1408沿着第三弯曲1476从第二部分1472转变,第三样条1476然后转变到第四样条1478。如图所示,在第四样条1478之后,纵向中心轴线1408近似与一直通向第一弯曲1468的纵向中心轴线1408共线。要注意,第一部分1466和第二部分1474的弯曲也可以近似处于相同平面内。但是,第一部分1466和第二部分1474的弯曲不处于相同平面内也是可能的。例如,当第一部分1466和第二部分1474的弯曲不处于相同平面内时,纵向中心轴线1408可以包括通过细长主体1402的这些部分的螺旋弯曲。其他形状也是可能的。
细长主体1402还可以包括例如如本文所述沿着细长主体1402的偏移区域1464的第二部分1472的一个或多个电极1414。如图所示,一个或多个电极1414可以在偏移区域1464的第二部分1472中的细长主体1402的表面上。导电元件1416延伸通过细长主体1402和/或沿着细长主体1402延伸,其中导电元件1416可以如本文所述用于将电流传导到一个或多个电极1414的组合。一个或多个电极1414中的每一个耦接到对应的导电元件1416。导电元件1416彼此电隔离,并且从每个相应的电极1414通过细长主体1402的第一端1404延伸通过细长主体1402和/或沿着细长主体1402延伸。导电元件1416终止于连接器端口处,其中每个导电元件1416能够可释放地耦接到刺激系统,例如,如本文所述。还可能的是,导电元件1416永久地耦接到刺激系统(例如,不可释放地耦接)。刺激系统可以用于提供刺激电能量(例如,电流或电脉冲),刺激电能量通过导电元件1416传导并在一个或多个电极1414的组合上传递。在一些示例中,一个或多个电极1414彼此电隔离,其中细长主体1402由电绝缘材料形成。
在细长主体1402的第二部分1472的一个表面上可以存在各种不同数量和配置的一个或多个电极1414。例如,一个或多个电极1414可以被配置为电极阵列,其中电极的数量和他们相对于彼此的相对位置可以根据期望的植入位置而变化。如本文所述,一个或多个电极1414可以被配置为允许电流从和/或在一个或多个电极1414的不同组合之间传输。电极阵列中的电极可以具有其中电极彼此均等间隔的重复图案。因此,例如,电极阵列中的电极可以具有列和行配置。替代地,电极阵列中的电极可以同心径向图案,其中电极被定位成形成电极的同心环。其他图案也是可能的,其中这样的图案可以是重复图案或随机图案。如本文所述,导管1462还包括延伸通过细长主体和/或沿着细长主体延伸的导电元件1416,其中导电元件1416将电流传导到一个或多个电极1414的组合。
如本文所述,帮助限定纵向中心轴线1408的第一部分1466和第三部分1474的每个弯曲的长度和弯曲度连同这样的弯曲之间的距离帮助限定偏移区域1464的相对高度。对于各个示例,偏移区域1464的高度可以由沿着主肺动脉和/或右和左肺动脉中的一个的一个或多个位置的内径来确定。以这种方式,第一部分1466和第三部分1474可以使第二部分1472和细长主体1402的表面上的一个或多个电极1414与靠患者的在主肺动脉和/或左和右肺动脉中的一个中的血管壁接触。换言之,细长主体1402的第一部分1466和第三部分1474在偏移区域1464中的转变可以用于抵靠患者的在主肺动脉和/或左和右肺动脉中的一个中的血管壁偏置第二部分1472和一个或多个电极1414。
细长主体1402还包括限定延伸通过细长主体1402和/或沿着细长主体1402延伸的导丝内腔1426的表面1424。如本文所设置,导丝内腔1426可以相对于细长主体1402的纵向中心轴线1408同心(如图14所示)。替代地,导丝内腔1426可以相对于细长主体1402的纵向中心轴线1408偏心。如本文所述,导丝内腔1426可以具有比导管1462的其余部分的垂直于纵向中心轴线1408截取的壁厚度1430大的壁厚度1428。在附加示例中,细长主体1402的一部分包括接近一个或多个电极1414的蜿蜒部分,如本文所述和所示。
对于本示例,与导管1462一起使用的导丝可以用于在导丝存在于沿着偏移区域1464穿过的导丝内腔1426中时临时“拉直”偏移区域1464。替代地,导丝可以用于给导管1462赋予偏移区域1464的形状。在这种示例中,导管1462的细长主体1402可以具有直的形状(例如,没有预定侧向形状)。为了赋予偏移区域1464,导丝在与细长主体1402上的偏移区域的期望纵向位置对应的点处被“成形”(例如,屈曲)为偏移区域的期望配置。可以通过插入具有预定侧向形状的导丝来提供导管1462的偏移区域1464。
在图14A中,本示例的导管1462还包括限定偏转内腔1454的表面1452,如本文所述。导管1462还包括细长偏转构件1460,也如本文所述。如大致示出的,细长偏转构件1460可以被推进通过偏转内腔1454以使得细长偏转构件1460远离细长主体1402的第二部分1472上的一个或多个电极1414侧向延伸。细长偏转构件1460可以具有允许细长偏转构件1460被延伸足以使一个或多个电极1414借助各种不同压力与血内腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触的距离的长度和形状。
在一种示例中,细长偏转构件1460的细长主体1461还可以包括一个或多个支撑丝线1481。支撑丝线1481可以包围在细长主体1461的柔性聚合物材料中,其中支撑丝线1481可以有助于向细长偏转构件1460提供列强度和预定形状。例如,支撑丝线1481可以具有沿着细长主体1461的长度纵向延伸的线圈形状。根据若干示例,线圈形状有利地允许施加在偏转构件1460的第一端1463处或附近的纵向力被传递通过细长主体1461从而从偏转内腔1454的第二开口1458侧向延伸偏转构件1460的第二端1465。
支撑丝线1481还可以在从偏转内腔1454的第二开口1458侧向延伸后给偏转构件1460提供预定形状。所述预定形状可以被确定为接合肺动脉的内腔壁以便使偏移区域1464的第二部分1472上的电极1414与血管组织接触。所述预定形状和支撑丝线1481还可以有助于向偏转构件1460赋予在位于患者的脉管系统内的状况下足以将电极1414保持在肺动脉的内腔壁上的硬度。
支撑丝线1481可以由各种不同金属或金属合金形成。这样的金属或金属合金的示例包括手术级不锈钢,例如尤其是奥氏体316不锈钢和以镍钛诺(Nitinol)为人所知的镍钛合金。根据需要和/或需求可以使用其他金属和/或金属合金。
现在参考图14B,示出了导管1462的附加示例。导管1462可以包括像在上面关于图12A-12D和/或14A所描述的导管的特征和部件,不再重复对其的讨论,但是在图14B中包含元件编号,可以理解对这些元件的讨论是隐含的。
图14B所示的导管1462类似于图14A的导管1462,其中导管1462的细长主体1402还包括限定垂直于纵向中心轴线1408截取的凸多边形横截面形状的三个或更多个表面1412,如本文针对导管1200所述。如图所示,一个或多个电极1414位于细长主体1402的三个或更多个表面1412中的一个表面上。在本示例中,细长主体1402的三个或更多个表面1412帮助形成细长主体1402的第二部分1472。如果期望,细长主体1402可以包括接近一个或多个电极1414的蜿蜒部分。
现在参考图15A,示出了根据本公开的导管1582的附加示例。导管1582可以包括像在上面关于图12A-12D、14A和/或14B所描述的导管的特征和部件,不再重复对其的讨论,但是在图15A中包含元件编号,可以理解对这些元件的讨论是隐含的。
导管1582包括具有外围表面1536和在第一端1504和第二端1506之间延伸的纵向中心轴线1508的细长主体1502。细长主体1502包括限定偏转内腔1554的表面1552,其中偏转内腔1554包括细长主体1502中的第一开口1554和第二开口1556。导管1582还包括在细长主体1502的外围表面1536上的可膨胀球囊1534,可膨胀球囊1534具有球囊壁1538,球囊壁1538具有内表面1540,内表面1540连同细长主体1502的外围表面1536的一部分1542限定流体密封体积1544,例如如本文先前所讨论。膨胀内腔1546延伸通过细长主体1502,其中膨胀内腔1546具有进入可膨胀球囊1534的流体密封体积1544的第一开口1548和接近第一开口1548的第二开口1550以允许流体(例如液体或气体)移入和移出流体密封体积1544从而使球囊1534膨胀和紧缩。
一个或多个电极1514位于细长主体1502上,其中偏转内腔1554的第二开口1558与细长主体1502上的一个或多个电极1514相对。导管1582还包括细长偏转构件1560,如本文所述,其中细长偏转构件1560在与细长主体1502的一个表面上的一个或多个电极1514相对的方向上延伸通过偏转内腔1554的第二开口1558。导管1582还包括延伸通过细长主体1502和/或沿着细长主体1502延伸的导电元件1516,其中导电元件1516将电流传导到一个或多个电极1514的组合。
导管1582还包括限定延伸通过细长主体1502和/或沿着细长主体1502延伸的导丝内腔1526的表面1524。如图所示,导丝内腔1526相对于纵向中心轴线1508同心。如本文所述,导丝内腔1526还可以相对于细长主体1508的纵向中心轴线1508偏心。在本文中讨论这样的示例,其中导丝内腔1526可以具有比导管1582的其余部分的垂直于纵向中心轴线1508截取的壁厚度大的垂直于纵向中心轴线1508截取的壁厚度。导管1582还可以包括接近一个或多个电极1514的细长主体1502的蜿蜒部分。
现在参考图15B,示出了导管1582的附加示例。导管1582可以包括像在上面关于图12A-12D、14A、14B和/或15A所描述的导管的特征和部件,不再重复对其的讨论,但是在图15B中包含元件编号,可以理解对这些元件的讨论是隐含的。
导管1582包括具有外围表面1536和在第一端1504和第二端1506之间延伸的纵向中心轴线1508的细长主体1502。细长主体1502包括限定偏转内腔1554的表面1552,其中偏转内腔1554包括细长主体1502中的第一开口1554和第二开口1556。导管1582还包括在细长主体1502的外围表面1536上的可膨胀球囊1534,可膨胀球囊1534具有球囊壁1538,球囊壁1538具有内表面1540,内表面1540连同细长主体1502的外围表面1536的一部分1542限定流体密封体积1544,如本文所讨论。膨胀内腔1546延伸通过细长主体1502,其中膨胀内腔1546具有进入可膨胀球囊1534的流体密封体积1544的第一开口1548和接近第一开口1548的第二开口1550以允许流体(例如液体或气体)移入和移出流体密封体积1544从而使球囊1534膨胀和紧缩。
一个或多个电极1514位于细长主体1502上,其中偏转内腔1554的第二开口1558与细长主体1502上的一个或多个电极1514相对。如图所述,细长主体1502具有限定垂直于纵向中心轴线1508截取的凸多边形横截面形状的三个或更多个表面1512。一个或多个电极1514位于细长主体1502的三个或更多个表面1512中的一个表面上,例如,如本文先前所述。
导管1582还包括细长偏转构件1560,其中细长偏转构件1560在与细长主体1502的一个表面上的一个或多个电极1514相对的方向上延伸通过偏转内腔1554的第二开口1558。导管1582还包括延伸通过细长主体1502和/或沿着细长主体1502延伸的导电元件1516,其中导电元件1516将电流传导到一个或多个电极1514的组合。
导管1582还包括限定延伸通过细长主体1502和/或沿着细长主体1502延伸的导丝内腔1526的表面1524。如图所示,导丝内腔1526相对于纵向中心轴线1508同心。如本文所述,导丝内腔1526还可以相对于细长主体1508的纵向中心轴线1502偏心。在本文中讨论这样的示例,其中导丝内腔1526可以具有比导管1582的其余部分的垂直于纵向中心轴线1508截取的壁厚度大的垂直于纵向中心轴线1508截取的壁厚度。导管1582还可以包括接近一个或多个电极1514的细长主体1502的蜿蜒部分。
现在参考图16,示出了导管1684的附加示例。导管1684可以包括像在上面关于图12A-12D、14A、14B、15A和/或15B所描述的导管的特征和部件,不再重复对其的讨论,但是在图16中包含元件编号,可以理解对这些元件的讨论是隐含的。
导管1684包括具有外围表面1636和在第一端1604和第二端1606之间延伸的纵向中心轴线1608的细长主体1602。导管1684还包括在细长主体1602的外围表面1636上的可膨胀球囊1634,可膨胀球囊1634具有球囊壁1638,球囊壁1638具有内表面1640,内表面1640连同细长主体1602的外围表面1636的一部分1642限定流体密封体积1644,如本文所讨论。膨胀内腔1646延伸通过细长主体1602,其中膨胀内腔1646具有进入可膨胀球囊1634的流体密封体积1644的第一开口1648和接近第一开口1648的第二开口1650以允许流体(例如液体或气体)移入和移出流体密封体积1644从而使球囊1634膨胀和紧缩。
导管1682包括限定延伸通过细长主体1602和/或沿着细长主体1602延伸的导丝内腔1626的表面1624。如图所示,导丝内腔1626相对于纵向中心轴线1608同心。如本文所述,导丝内腔1626还可以相对于细长主体1608的纵向中心轴线1608偏心。在本文中讨论这样的示例,其中导丝内腔1626可以具有比导管1682的其余部分的垂直于纵向中心轴线1608截取的壁厚度大的垂直于纵向中心轴线1608截取的壁厚度。导管1682还可以包括接近一个或多个电极1614的细长主体1602的蜿蜒部分。
导管1684的细长主体1602还包括限定电极内腔1688的表面1686。电极内腔1688包括在细长主体1602中的第一开口1690和第二开口1692。导管1684还包括细长电极构件1694,其中细长电极构件1694可缩回地延伸通过细长主体1602的电极内腔1688的第一开口1690。电极内腔1688具有足以允许细长电极构件1694穿过电极内腔1688以使得细长电极构件1694能够可缩回地延伸通过细长主体1602的电极内腔1688的第一开口1690的大小(例如,直径)。细长电极构件1694能够由于通过接近细长主体1608中的第二开口1692的细长电极构件1694由用户(例如,临床医生或专业人员)施加的压力(例如,压缩力或张力)而可缩回地延伸通过细长主体1602的电极内腔1688的第一开口1690。对于各种示例,细长电极构件1694由柔性聚合物材料形成。这样的柔性聚合物材料的示例包括但不限于本文所述的那些柔性材料。
细长电极构件1694包括一个或多个电极1696和延伸通过电极内腔1688的导电元件1698。如图所示,一个或多个电极1696位于细长电极构件1694的一个表面1601上。导电元件1698延伸通过细长电极构件1694,其中导电元件1698可以例如如本文所述用于将电流传导到一个或多个电极1696的组合。一个或多个电极1696中的每一个耦接到对应的导电元件1698。
导电元件1698可以彼此电隔离,并且从每个相应的电极1696通过电极内腔1688的第二端1692延伸通过细长电极构件1694。导电元件1698终止于连接器端口处,其中每个导电元件1698能够可释放地耦接到刺激系统,如本文所述。还可能的是,导电元件1698永久地耦接到刺激系统(例如,不可释放地耦接)。刺激系统可以用于经由导电元件1698将电流或电脉冲传导到一个或多个电极1694的组合。一个或多个电极1696彼此电隔离,其中细长电极构件1694由电绝缘材料形成。
细长电极构件1694上的一个或多个电极1696的数量和配置可以在不同示例中不同。例如,一个或多个电极1696可以被配置为电极阵列,其中电极的数量和他们相对于彼此的相对位置可以根据期望的植入位置而变化。如本文所述,一个或多个电极1696可以被配置为允许电流从和/或在一个或多个电极1696的不同组合之间传输。因此,例如,电极阵列中的电极可以具有其中电极彼此均等间隔的重复图案。其他图案也是可能的,其中这样的图案可以是重复图案或随机图案。
如图所示,一个或多个电极1696具有暴露面1603。与面对动脉中的血液的体积不同,电极1696的暴露面1603为电极1696提供了当被植入(临时地或持续长期的持续时间段)在患者中时被放置成与患者的血管组织接近和/或接触的机会。为了做到这一点,一个或多个电极1696可以仅位于细长电极构件1694的一侧上(如图16所示)。这允许使一个或多个电极1696与血内腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触。当一个或多个电极1696仅位于细长电极构件1694的一侧上时,电极1696可以被放置成与主肺动脉、左肺动脉和/或右肺动脉的任何组合的组织直接接近和/或接触。
一个或多个电极1696的暴露面1603可以具有各种不同形状,如本文所述(例如,部分环形配置,其中一个或多个电极1696中的每一个均定位成背离细长主体1602)电极1696的暴露面1603还可以包括一个或多个锚固件结构。这样的锚固件结构的示例包括可以可选地包括倒钩的钩子。
如大致示出的,细长电极构件1694可以被推进通过电极内腔1688以使得细长电极构件1694远离细长主体1608侧向延伸。细长电极构件1694可以具有允许细长电极构件1694从细长主体1608被延伸足以使一个或多个电极1696与血内腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触的距离的长度和形状。
如图16所示,细长电极构件1694形成远离细长主体1602的外围表面1636延伸的环1605。环1605可以具有相对于细长主体1602的纵向轴线1608的各种不同配置。例如,如图16所示,形成环1605的细长电极构件1692位于与细长主体1602的纵向中心轴线1608共线的平面1602中。
导管1684还包括细长偏转构件1660,如前所述。如本文所述,向偏转构件1660施加压力以朝向偏转内腔1654的第一开口1656移动偏转构件1660的第一端1663。除了使偏转构件1660的第一端1663朝向第一开口1656移动之外,压力还使偏转构件1660的第二端1665从第二开口1658延伸。如大致示出的,细长偏转构件1660可以被推进通过偏转内腔1654以使得细长偏转构件1660远离细长电极构件1694上的一个或多个电极1696侧向延伸。细长偏转构件1660可以具有允许细长偏转构件1660被延伸足以帮助使一个或多个电极1696借助各种不同压力与血内腔面(例如,主肺动脉和/或肺动脉中的一个或两个的后表面)接触的距离的长度和形状。可选地,细长偏转构件1660可以被配置为包括一个或多个电极。
图16所示的导管1684可以被定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中,例如,如本文所述。为了做到这一点,肺动脉导管引导导管通过透皮切口被引入脉管系统中并被引导到右心室(例如,使用斯旺-甘兹氏导管插入方法)。例如,肺动脉引导导管可以经由手臂、颈部或胸部的外周静脉插入到脉管系统中(例如,像周边地插入的中心导管一样)。患者的来自脉管系统的心电图和/或压力信号的变化可以用来将肺动脉引导导管引导和定位在患者的心脏内。一旦在合适位置,就可以将导丝经由肺动脉引导导管导引入到患者中,其中导丝被推进到主肺动脉和/或肺动脉脉中的一个中。使用导丝内腔1626就,可以通过导丝推进导管1684以将导管1684定位在患者的主肺动脉和/或左和右肺动脉中的一个或两个中。各种成像医疗器械可以用来将本公开的导丝定位于患者的主肺动脉和/或左和右肺动脉中的一个中。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
使用刺激系统(例如本文所述的刺激系统),可以在电极1696中的一个或多个的组合上传输刺激电能量(例如,电流或电脉冲)。可以监测和记录患者对于刺激电能量的心脏响应,以与其他后续测试进行比较。可以理解对于本文所述的任何导管,电极(包括定位在患者身体内或上的参考电极(如本文所述))的任何组合都可以用于向患者提供刺激和感测来自患者的心脏信号。
现在参考图17,示出了导管1784的附加示例。导管1784可以包括像在上面关于图12A-12D、14A、14B、15A、15B和/或16所描述的导管的特征和部件,不再重复对其的讨论,但是在图17中包含元件编号,可以理解对这些元件的讨论是隐含的。导管1784示出了在其中细长电极构件1794在垂直于细长主体的纵向中心轴线的平面1707中形成环1705的示例。根据若干示例,可以与导管一起使用一个以上的细长电极构件。
现在参考图18A至18C,示出了适于执行本公开的某些方法的示例性导管1830的透视图。导管1830包括具有近端或第一端1834和远端或第二端1836的细长导管主体1832。细长导管主体1832还包括外或外围表面1838和限定在细长导管主体1832的第一端1834和第二端1836之间延伸的内腔1842(以虚线示出)的内表面1840。
导管1830还包括沿着细长导管主体1832的外围表面1838定位的多个电极1844。在一些示例中,电极1844接近导管1830的远端1836。导电元件1846延伸通过细长主体1832和/或沿着细长主体1832延伸,其中导电元件1846可以如本文所述用于将电流传导到多个电极1844的组合。多个电极1844中的每一个耦接(例如,电耦接)到对应的导电元件1846。导电元件1846彼此电隔离,并且从每个相应的电极1844通过细长主体1832的第一端1834延伸通过细长主体1832。导电元件1846终止于连接器端口处,其中每个导电元件1846能够可释放地耦接到刺激系统。还可能的是,导电元件1846永久地耦接到刺激系统(例如,不可释放地耦接)。如本文更全面地讨论的,刺激系统可以用于提供刺激电脉冲,电脉冲通过导电元件1846传导并在多个电极1844的组合上传递。电极的其他位置和配置也是可能的。将PCT专利申请No.PCT/US2015/031960、PCT/US2015/047770和PCT/US2015/047780通过引用整体并入本文,更特别地,通过引入将其中公开的电极(例如,可部署丝线上的电极)和电极矩阵并入本文。
细长主体1832可以包括电绝缘材料(例如,至少部分地由电绝缘材料形成)。这样的绝缘材料的示例可以包括但不限于:医用级聚氨酯,尤其是例如,基于聚酯的聚氨酯、基于聚醚的聚氨酯和基于碳酸酯的聚氨酯;聚酰胺、聚酰胺嵌段共聚物、聚烯烃(例如,聚乙烯(例如,高密度聚乙烯));以及聚酰亚胺。
导管1830可选地包括锚固件1848。锚固件1848包括形成打开的框架的支柱1850,其中支柱1850从细长主体1832(例如,从细长主体1832的外围表面1838)向外侧向或者径向延伸,以至少部分限定配置成接合脉管组织的外围表面1852(例如,配置成置于形成右肺动脉和/或左肺动脉的内腔附近)。图18A至18C示出了定位于细长导管主体1832的第二端1836和多个电极1844之间的锚固件1848。还可能的是,锚固件1848可以定位于细长导管主体1832的多个电极1844和第二端1836之间。在一些示例中,锚固件1848可以抑制或阻止导管1830的至少一部分(例如,部分1854,包括电极1844的一部分)延伸到比扩张的支柱1850小的脉管系统中。例如,参照图19,多个电极1944可以在分支点1976的近端,以使得导管1930的在锚固件1948近端的部分不会延伸到两个额外的动脉1978中。如果传感器1966在锚固件1948的远端,则锚固件1948和分支点1976的相互作用可以确保传感器1966处于肺动脉分支血管1978中。
支柱1850可以具有这样的横截面形状和尺寸——其允许支柱1850提供足以在各种情况下将导管1830保持在肺动脉中的植入位置的径向力,如本文中所讨论。支柱1850可以由各种材料形成,例如,金属、金属合金、聚合物等。这样的金属或金属合金的例子包括医用级不锈钢,例如,特别是奥氏体(austenitic)316不锈钢等;以及称为镍钛诺(Nitinol)的镍和钛合金。可以使用已知的或者可能被开发的其他材料和/或金属合金。
细长导管主体1832的部分1854(例如,其可以包括多个电极1844中一个、一些、没有任何一个、或者全部)例如在处于纵向压缩下时,可以在预定径向方向上(例如,前、后、下、上及其组合)弯曲。为了提供部分1854中的弯曲,细长导管主体1832可以预加应力,和/或壁可以具有允许细长导管主体1832在预定径向方向上弯曲的厚度,例如,当处于纵向压缩下时。此外或者备选地,诸如每单位长度具有不同匝数的线圈或者螺旋状丝线、具有变化的切槽间距的海波管(hypotube)等的结构可以位于部分1854中的细长导管主体1832中、周围和/或沿着该细长导管主体1832。一个或多个这些结构可以用来允许纵向压缩,以在部分1854中在预定径向方向上产生弯曲。为了获得纵向压缩,锚固件1848可以部署在患者的脉管系统中(例如,在肺动脉中),其中锚固件1848提供对抗细长主体1832的纵向移动的阻力位置或点。因此,这允许在细长导管主体1832中产生足以使得细长导管主体1832的部分1854(例如,沿着该部分1854存在多个电极1844)在预定径向方向上弯曲的压缩力。
图18D提供了当处于纵向压缩下时,在预定径向方向上弯曲的细长导管主体1832的部分1854的视图。在图18D中示出的导管1830与在图18A中示出并且在本文中描述的导管1830相似,但是也可以使用具有相似特征的其他导管。在图18D所示的导管1830中,传感器1866在电极1844的近端。当电极1844处于右肺动脉206中时,传感器1866可以例如在肺动脉干202中。如果传感器1866在更近的近端,则传感器1866可以在右心室、上腔静脉等中。将传感器1866沿着导管1830定位在近端可以允许传感器1866处于与电极1844的位置不同的位置,而不用与定位电极1844分离地定位传感器1866。如图18D中所示,导管1830至少部分定位在患者的心脏200的主肺动脉202中,其中锚固件1848位于右肺动脉206的内腔中。从该位置,施加到细长导管主体1832的纵向压缩力可以使得细长导管主体1832的部分1854,在该示例中随同多个电极1844中的至少一些一起,在预定径向方向上弯曲,在本示例中向上。该弯曲允许(例如,导致)多个电极1844朝向主肺动脉202和/或右肺动脉206的腔面延伸和/或接触该腔面。优选地,多个电极1844被带入主肺动脉202和/或右肺动脉206的位置和/或与主肺动脉202和/或右肺动脉206的腔面接触。
在一些示例中,导管1830的细长导管主体1832可以使用从第一端1834朝着第二端1836延伸的内腔1842以提供在预定径向方向上的弯曲。例如,导管1830可以包括具有第一端1859和第二端1861的成形丝线1857,如图18A中所示。成形丝线1857可以屈曲并且保持期望形状,一旦插入到内腔1842中,该形状可以至少部分地提供具有弯曲的导管1830。内腔1842的大小(例如,直径)足以允许成形丝线1857通过内腔1842,其中成形丝线1857的第二端1861接近细长导管主体1832的第二端1836,以使得成形丝线1857的屈曲部分1863将弯曲赋予到细长导管主体1832的部分1854,允许多个电极1844朝着主肺动脉的腔面延伸和/或接触该腔面。在一些示例中,成形丝线1857可以补足部分1854。在一些示例中,成形丝线1857可以用来替代部分1854(例如,如果导管1830未包括部分1854或者由于不赋予纵向压缩力)。在一些示例中,成形丝线1857可以用来赋予弯曲,该弯曲与在施加压缩力情况下部分1854导致的弯曲相反。在一些示例中,成形丝线1857可以以任何旋转定向插入到内腔1842中,以使得可以例如根据锚固件1848的位置,在任何期望的径向方向上赋予弯曲。即使例如因为导管主体1832不管导管1830是否锚固到脉管系统都顺应成形丝线的形状因而导管1830不包括锚固件1848,成形丝线1857也可以允许弯曲的形成。在一些示例中,成形丝线1857插入到内腔1842中向部分1854赋予弯曲,以使得电极1844中的至少一个置于肺动脉的上/后侧壁附近。
在一些示例中,神经调节系统包括导管1830和成形丝线1857。导管1830包括导管主体1832、电极1844和传感器1866。导管主体1832包括近端1834、远端1836、从近端1834朝着远端1836(例如,至少在电极1844的远端)延伸的内腔1842以及外表面1838。电极1844在外表面1838上。电极1844配置成将电信号传送到患者的肺动脉(例如,以提供校准和/或治疗刺激给接近肺动脉的神经)。
成形丝线1857包括配置成使导管主体1832屈曲的材料。例如,成形丝线1857的径向力可以大于保持导管主体1832处于大致直的配置的力。在一些示例中,成形丝线1857包括形状记忆材料(例如,镍钛诺、铬钴合金、铜镍锡合金等)或者弹性材料(例如,不锈钢等)。例如,成形丝线1857可以在导管1830的近端部分被加应力成直的丝线,但是在导管1830的要被屈曲的部分中,该部分可以例如弱于导管1830的近端部分,成形丝线1857可以在导管1830中恢复到无应力的弯曲的形状。在一些成形丝线1857包括形状记忆材料的示例中,成形丝线1857可以利用热形状记忆。例如,成形丝线1857可以是大致直的形状,直到冷或温流体(例如,生理盐水)使得恢复到弯曲形状。在一些这样的示例中,整个导管1830可以被成形丝线1857屈曲,但是一旦成形丝线1857处于期望的纵向和/或径向位置,就招致温度改变。在一些示例中,整个导管1830可以被成形丝线1857屈曲。例如,弯曲可以沿着导管1830的长度传播,直到弯曲处于期望位置。
成形丝线1857具有比内腔1842的直径或横截面尺寸小的直径或横截面尺寸。例如,如果导管主体1832是20弗伦奇(Fr)(大约6.67毫米(mm)),则内腔1842可以是18Fr(大约6mm),并且成形丝线1857可以是16Fr(大约5.33mm)。成形丝线1857可以例如比内腔1842小1Fr(例如,比在小2Fr的情况下更多的径向力)或者比内腔1842小2Fr(例如,比在小1Fr的情况下在导引期间更少的摩擦力)。成形丝线1857可以例如比导管主体1832小2Fr(例如,如果内腔1842比导管主体1832小1Fr)或者比导管主体1832小4Fr(例如,给内腔1842的大小提供小于导管主体1或2Fr的柔韧性)。除了弗伦奇导管规模之外的成形丝线大小也是可能的(例如,具有小于内腔1842的直径大约0.05mm、0.1mm、大约0.2mm、大约0.25mm、大约0.5mm、在这样的值之间的范围等等的直径)。
传感器1866在外表面1838上。传感器1866配置成从患者的脉管系统中的位置感测热活动特性(例如,非电心脏活动特性,例如,压力特性、加速度特性、声学特性、温度和血液化学特性)。该位置可以不同于电极1844定位在其中的肺动脉。例如,如果电极1844在右肺动脉中,则传感器1866的位置可以在肺动脉干、肺动脉分支血管、右心室、心室间隔壁、右心房、右心房间隔壁、上腔静脉、下腔静脉、左肺动脉、冠状窦等中。成形丝线1857配置成定位在导管主体1832的内腔1842中。成形丝线包括屈曲部分1863。例如,从近端1859至远端1861,成形丝线1857可以在基本上直的部分中基本上直的,然后具有远离直的部分的纵向轴线延伸的屈曲部分1863。屈曲部分1863可以包括一个屈曲或者多个屈曲(例如,两个屈曲(如图18A中所示)、三个屈曲或者更多个屈曲)。成形丝线1857可以可选地在屈曲部分之后包括另一个基本上直的部分,其可以具有与近端直的部分的纵向轴线基本上对齐的纵向轴线。当成形丝线1857插入在导管主体1832的内腔1842中时,导管主体1832包括与成形丝线1857的屈曲部分1863对应的弯曲部分1854。例如,导管主体1832或部分1854可以包括能够由于施加到导管主体1832的内腔1842或内表面1840的压力或应力而屈曲的材料。在一些示例中,成形丝线1857插入到内腔1842中向部分1854赋予弯曲,以使得电极1844中的至少一个置于肺动脉的上/后侧壁附近。
图18A至18C进一步示出了可以与导管1830一起使用的示例性传送导管1856。传送导管1856可以是斯旺-甘兹氏肺动脉导管,如所已知,其包括限定大小足以接收、存储和部署导管1830的内腔1860的表面1858。如所示,传送导管1856包括与球囊膨胀内腔流体流通的可逆膨胀的球囊1862,球囊膨胀内腔从传送导管1856的近端或第一端1864(例如,其中膨胀内腔可以到膨胀流体源)延伸到可逆膨胀的球囊1862的内部体积。
导管1830还包括第一传感器1866。如在图18A至18C中所示,第一传感器1866可以沿着导管1830定位于多个不同的位置。在图18A中,第一传感器1866定位于在锚固件1848远端的细长导管主体1832上。接近导管1830的远端1836的传感器1866还可以或者备选地有用于导管1830的导引,例如,以在利用诸如斯旺-甘兹氏导管浮动球囊期间确定解剖学位置。在图18B中,第一传感器1866定位于锚固件的支柱250的一个上或者之间。在图18C中,第一传感器1866定位于锚固件1848和多个电极1844的近端。在图18D中,第一传感器1866定位于足以使第一传感器1866能够处于不同于电极1844的脉管系统的位置中的近端。在一些示例中,导管1830包括在不止图18A至18C中所示的一个位置和/或其他位置处的多个传感器1866。
导管1830还包括传感器导体1868。第一传感器1866耦接到传感器导体1868并且与导电元件1846和电极1844隔离。耦接可以是电的、光学的、压力的等。传感器导体1868从第一传感器1866延伸通过细长主体1832,通过细长主体1832的第一端1834。传感器导体1868终止于连接器端口,其可以例如用于将第一传感器1866可释放地耦接到刺激系统,如本文所讨论。
第一传感器1866可以用于感测一个或多个活动特性(例如,电和/或非电心脏活动特性)。在一些示例中,可以响应于使用多个电极1844传送的一个或多个电脉冲测量所述特性。非电心脏活动特性的例子包括但不限于从心脏的脉管系统内测量的压力特性、加速度特性、声学特性、温度和血液化学特性中的一个或多个。如所理解的,可以通过使用导管1830上的超过一个传感器测量非电心脏活动特性中的两个或更多个。
为了用于检测压力特性,第一传感器1866可以是压力感测换能器,例如在美国专利No.5,564,434中公开的压力感测换能器(例如,配置成检测血压、大气压力和/或血液温度变化,并且提供调节的压力和/或温度相关信号),其整体通过援引并入本文。为了用于检测加速度特性,第一传感器1866可以是加速度传感器,例如在Chinchoy的美国专利公开No.2004/0172079中公开的加速度传感器(例如,配置成产生与心肌或壁(例如,冠状静脉窦壁、间隔壁或心室壁)的加速度成比例的信号),或者在Nehls等人的美国专利7,092,759中公开的加速度传感器(例如,配置成产生与心肌或壁(例如,冠状静脉窦壁、间隔壁或心室壁)的加速度、速度和/或位移成比例的信号),将上述公开的每一个通过援引整体并入本文。为了用于检测声学特性,第一传感器1866可以是压电换能器(例如,麦克风)或者血流传感器,例如在美国专利No.6,754,532中公开的传感器(例如,配置成测量血液的速度以估计血流量),其通过援引整体并入本文。为了用于检测温度,第一传感器1866可以是温度传感器,例如在美国专利No.5,336,244中公开的温度传感器(例如,配置成检测指示心脏的机械泵血动作的血液温度和/或氧气浓度的变化)和/或美国专利公开No.2011/0160790中公开的温度传感器(例如,配置成感测温度和产生温度信号),将上述公开的每一个通过援引整体并入本文。为了用于检测血液化学特性,第一传感器1866可以是氧气传感器或者血糖传感器,例如,在美国专利No.5,213,098中公开的传感器(例如,配置成感测随着心肌氧摄入而改变的血氧饱和度水平)和/或美国专利公开No.2011/0160790中公开的传感器(例如,配置成测量血液中氧和/或血糖浓度以及/或者产生氧气和/或血糖信号),将上述公开的每一个通过援引整体并入本文。其他类型的传感器也可以用于第一传感器1866,本文描述的其他传感器等。
图18A至18C中所示的导管1830可以定位于患者的右肺动脉、左肺动脉或者肺动脉干中,例如如本文所描述。为了这样做,可以将其中容纳有导管1830的传送导管1856通过经皮切口引入到脉管系统中,并且导引到右心室。例如,传送导管1856可以经由颈或胸的外周静脉插入到脉管系统中(例如,与斯旺-甘兹氏导管一样)。患者的来自脉管系统的心电图和/或压力信号的变化可以用来将肺动脉导管引导和定位在患者的心脏中。一旦在合适位置,就可以将导丝经由肺动脉引导导管导引入到患者中,其中导丝被推进到期望的肺动脉(例如,右肺动脉)中。其中容纳有导管1830的传送导管1856可以通过导丝推进,以将导管1830定位于患者的期望的肺动脉(例如,右肺动脉或者左肺动脉)中,例如如本文所描述。各种成像医疗器械可以用来将本公开的导丝定位于患者的肺动脉中。这样的成像医疗器械包括但不限于荧光镜检查、超声、电磁和电位医疗器械。
当导管1830定位于右肺动脉或者左肺动脉中并且传感器1866配置成在电极1844的近端时,电极1844(例如,从最近端的电极1844)和传感器1866之间的距离可以在大约1cm和大约5cm之间(例如,大约1cm、大约2cm、大约3cm、大约4cm、大约5cm、在这些值之间的范围等),在这种情况下传感器1866驻留于肺动脉干中,在大约8cm和大约2cm之间(例如,大约8cm、大约9cm、大约10cm、大约11cm、大约12cm、大约13cm、大约14cm、大约16cm、大约18cm、大约20cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于右心室中,在大约16cm和大约27cm之间(例如,大约16cm、大约17cm、大约18cm、大约19cm、大约20cm、大约21cm、大约22cm、大约23cm、大约25cm、大约27cm、在这些值之间的范围等),在这种情况下传感器1866驻留于右心房中,或者在大约21cm和大约33cm之间(例如,大约21cm、大约23cm、大约25cm、大约26cm、大约27cm、大约28cm、大约29cm、大约30cm、大约31cm、大约32cm、大约33cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于上腔静脉中。
当导管1830定位于肺动脉干中并且传感器1866配置成在电极1844远端时,电极1844(例如,从最远端的电极1844)和传感器1866之间的距离可以在大约1cm和大约5cm之间(例如,大约1cm、大约2cm、大约3cm、大约4cm、大约5cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于右肺动脉或者左肺动脉中。当导管1830定位于肺动脉干并且传感器1866配置成在电极1844的近端时,电极1844(例如,从最近端的电极1844)和传感器1866之间的距离可以在大约3cm和大约19cm之间(例如,大约3cm、大约5cm、大约6cm、大约7cm、大约8cm、大约9cm、大约10cm、大约12cm、大约15cm、大约19cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于右心室中,在大约11cm和大约26cm之间(例如,大约11cm、大约13cm、大约15cm、大约16cm、大约17cm、大约18cm、大约19cm、大约20cm、大约22cm、大约24cm、大约26cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于右心房中,或者在大约16cm和大约32cm之间(例如,大约16cm、大约18cm、大约20cm、大约22cm、大约24cm、大约25cm、大约26cm、大约27cm、大约28cm、大约30cm、大约32cm、在这些值之间的范围等),在这种情况下传感器1866可以驻留于上腔静脉中。
图19提供了定位于受试者(例如,患者)心脏200中的导管1930的透视图,其中多个电极1944中的一个或多个接触右肺动脉206的后221和/或上表面223(例如,在分支点207上侧的位置处)。图19还示出了第一传感器1966定位于锚固件1948的远端的示例。如图所示,肺动脉干202具有在平面1972上截取的直径1970,该平面1972基本上垂直于左侧向平面220和右侧向平面216。在优选示例中,导管1930的多个电极1944定位于区域1974中,该区域1974在远端延伸不超过肺动脉干202的直径1970的大约三倍,直到分支点207的右侧。该区域1974在图19中以剖面阴影线示出。
右肺动脉206还可以包括分支点1976,该分支点1976将右肺动脉206分成至少两个附加动脉1978,附加动脉1978在限定左肺动脉208和右肺动脉206的分支点207的远端。如图19中所示,多个电极1944可以定位于限定左肺动脉208和右肺动脉206的分支点207和将右肺动脉206分成至少两个附加动脉1978的分支点1976之间。换句话说,导管1930的多个电极1944可以定位成接触右肺动脉206的后221和/或上表面223,直到包括分支点1976。
一旦定位于患者的心脏的肺动脉(例如,如图19中所示的右肺动脉206、左肺动脉208和/或肺动脉干202)中,则可以通过导管1930的多个电极1944传送一个或多个治疗和/或校准电脉冲。从定位于心脏200的脉管系统中的第一位置处的至少第一传感器1966感测响应于一个或多个电脉冲的一个或多个心脏活动特性。
导管1830,1930可以能够永久地或可逆地植入到脉管系统中。例如,导管1830,1930可以在持续时间之后从脉管系统缩回(例如,在去除锚固件1848,1948之后)。持续时间可以至少部分基于设定持续时间(例如,某些数量的小时或者天(例如,12小时、18小时、24小时、2天、3天、4天、5天、6天等))确定。持续时间可以至少部分基于患者的反应而确定(例如,当患者已经在某些方面提高了某些量或者被认为已经准备好使导管1830,1930被去除时缩回)。
图20示出了有用于本公开的方法的示例性导管2030和分离的第一传感器2066。与导管1830类似,导管2030包括细长导管主体2032,细长导管主体2032具有近端或第一端2034和远端或第二端2036、外围表面2038和限定内腔2042(以虚线示出)的内表面2040,该内腔2042在细长导管主体2032的第一端2034和第二端2036之间延伸。导管2030还包括沿着细长导管主体2032的外围表面2038定位的多个电极2044,以及在多个电极2044和第一端2034之间延伸通过细长主体2032的导电元件2046,如本文所讨论。导管2030还包括锚固件2048,锚固件2048包括支柱2050,该支柱2050提供能够接合脉管组织(例如,右肺动脉或做肺动脉的内腔)的外围表面2052。
导管2030还包括例如包括多个电极2044的细长导管主体2032的部分2054,其中部分2054能够在处于纵向压缩下时在预定径向方向上弯曲,如本文所讨论。导管2030的细长导管主体2032还可以或者备选地包括可以接收成形丝线的内腔2042,如本文所讨论。
然而,与图18A至18D中所示的导管相比,导管2030不包括第一传感器。而是,第二导管2080包括第一传感器2066。如图20中所示,第二导管2080包括细长导管主体2082,细长导管主体2082具有第一端2084和第二端2086、外围表面2088和限定在细长导管主体2082的第一端2084和第二端2086之间延伸的内腔2092(以虚线示出)的内表面2090,其中内腔2092可以接收导丝以帮助将第二导管2080定位在心脏的脉管系统中。第二导管2080还包括在细长导管主体2082上的第一传感器2066(如本文所讨论)以及传感器导体2068,其延伸通过细长导管主体2082以终止于连接器端口,该连接器端口可以用来例如将第一传感器2066可释放地耦接到刺激系统,如本文所讨论。
因为第一传感器2066被包括在第二导管2080上,所以第一传感器2066可以定位于患者的脉管系统中的与导管2030被定位的第一位置不同的位置中。例如,导管2030可以定位成多个电极2044定位在右肺动脉中,如本文所讨论,而第一传感器2066定位在左肺动脉中。这样,一个或多个电脉冲可以通过定位于心脏的右动脉中的不包含第一传感器2066的导管2030传送。在一些示例中,当导管2030定位成多个电极2044定位于左肺动脉中时,第一传感器2066可以定位于右肺动脉中。这样,一个或多个电脉冲可以通过定位于心脏的左肺动脉中的不包含第一传感器2066的导管2030传送。
在一些示例中,导管2030可以定位成多个电极2044定位在左肺动脉或者右肺动脉中任一个中,并且第二导管2080上的第一传感器2066可以定位于心脏的右心室中。第二导管2080上的第一传感器2066还可以定位于心脏的右心房中。
在一些示例中,第二导管2080上的第一传感器2066还可以定位于右心房的间隔壁或者心脏的心室间隔壁上。第二导管2080的细长导管主体2082可以包括主动(positive)固定结构(例如,螺旋螺钉),其帮助将细长导管主体2082和第一传感器2066固定到心脏的右心房的间隔壁。
在一些示例中,第二导管2080上的第一传感器2066可以定位于心脏的上腔静脉中。在一些示例中,第二导管2080上的第一传感器2066可以定位于心脏的下腔静脉中。在一些示例中,第二导管2080上的第一传感器2066可以定位于心脏的冠状窦中。在优选示例中,当第一传感器2066定位于心脏的冠状窦中时,第一传感器2066用来感测温度和血氧水平中的至少一个。
一个或多个心脏特性还可以或者替代地从患者的皮肤表面感测。这样的心脏特性的例子包括心电图特性,其中心脏的电活动可以使用已知的附接到患者皮肤表面的电极感测。这样的心脏特性的另一个例子可以包括多普勒心回波图,其可以用来确定血流的速度和方向。从患者皮肤表面感测的声学信号也可以用作心脏特性。如本文所讨论,可以响应于血管内测量的一个或多个心脏活动特性和/或来自患者皮肤表面的一个或多个心脏特性,然后调整通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。
在一些示例中,除了第一传感器之外,还可以例如响应于一个或多个电脉冲,使用位于心脏的脉管系统中的第二位置处的第二传感器来感测一个或多个心脏活动特性。第二位置不同于第一位置。例如,第一位置可以是左肺动脉,而第二位置可以是右肺动脉;第一位置可以是左肺动脉,而第二位置可以是肺动脉干;第一位置可以是左肺动脉,而第二位置可以是右心室;第一位置可以是左肺动脉,而第二位置可以是右心房;第一位置可以是左肺动脉,而第二位置可以是右心房的间隔壁;第一位置可以是左肺动脉,而第二位置可以是心室间隔壁;第一位置可以是左肺动脉,而第二位置可以是上腔静脉;第一位置可以是左肺动脉,而第二位置可以是下腔静脉;第一位置可以是左肺动脉,而第二位置可以是冠状窦;以及这些位置的其他置换。
在一些示例中,第二传感器是第二导管2080的传感器2066,而第一传感器是导管230的传感器266。在一些示例中,第一传感器和第二传感器可以位于相同导管(例如,导管230、导管2080)上。例如,第一传感器和第二传感器都可以位于第二导管2080上,以用于感测至少两个不同的心脏活动特性。对于另一例子,第一传感器和第二传感器都可以位于导管230上,以用于感测至少两个不同的心脏活动特性。如本文所讨论,可以响应于从第一传感器和第二传感器接收的一个或多个心脏活动特性,调整通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。
根据本公开的心脏的神经调节可以通过在肺动脉的区域中和/或周围施加电脉冲而实现。例如,本公开的神经调节可以施加电脉冲到右肺动脉的后、上壁和/或下壁。优选地,本公开的神经调节包括施加电脉冲到右肺动脉的后和/或上壁,但是右肺动脉、左肺动脉和肺动脉干中的其他位置也是可能的。从而,将电脉冲施加到右肺动脉周围的自主心肺神经。这些自主心肺神经可以包括右自主心肺神经和左自主心肺神经。右自主心肺神经包括右背侧中间心肺神经和右背侧侧向心肺神经。左自主心肺神经包括左腹侧心肺神经、左背侧中间心肺神经、左背侧侧向心肺神经以及左星状心肺神经。接近于右肺动脉的其他神经的刺激也是可能的。
参照图19,导管1930的多个电极1944中的一个或多个可以接触右肺动脉206的后表面221。从该位置,通过多个电极1944中的一个或多个传送的电脉冲可以更好地能够对经历多种心血管医学症状(例如,急性心力衰竭)的患者进行治疗和/或提供治疗(包括辅助治疗)。电脉冲可以从自主神经系统引起反应,这可以帮助调节患者的心脏收缩性和/松弛性。本文所描述的方法施加的电脉冲优选地影响心脏收缩性和/松弛性超过心率,这可以在可能时提高血液动力学控制和/或降低或最小化不想要的系统效应。
根据若干示例,刺激系统(例如,经由延伸通过导管的导电元件)电耦接到本文描述的导管的多个电极。刺激系统可以用来将刺激能量(例如,电流或电脉冲)传送到肺动脉(例如,右或左肺动脉,或主肺动脉或主肺动脉干)周围的自主心肺纤维。刺激系统用于进行操作并提供刺激能量(例如,电流或电脉冲)到导管的多个电极。刺激系统控制在多个电极上传送的刺激能量(例如,电流或电脉冲)的各种特性。这样的特性包括与刺激能量(例如,电流或电脉冲)关联的极性(例如,用作阴极或阳极)、脉冲模式(例如,单极、双极、双相、和/或多极)、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、停延时间、顺序、波长和/或波形的控制。刺激系统可以进行操作和提供刺激能量(例如,电流或电脉冲)到一个或多个电极(包括一个或多个参考电极)的不同组合和数量。刺激系统可以在患者身体的外部或者在患者身体的内部。当位于身体外部时,专业人员可以编程刺激系统并且监测其表现。当位于患者内时,刺激系统的外壳或者包括在外壳中的电极可以用作感测和单极脉冲模式的参考电极。
非电心脏活动特性的例子包括但不限于压力特性、加速度特性、声学特性、温度或血液化学特性。非电心脏活动特性可以通过定位于心脏的脉管系统中的第一位置处的至少第一传感器感测。响应于一个或多个非电心脏活动特性,可以调整通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的特性。这样的调整的例子包括但不限于改变导管上的多个电极中的哪个电极或者哪些电极用来传送一个或多个电脉冲调整还可以对电脉冲的特性进行,例如通过改变一个或多个电脉冲的电极极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形和/或电极组合中的至少一个。还可以的是,调整使用的电极的组合以及由电极提供的电脉冲的特性。调整一个或多个电脉冲的特性可以包括移动导管以将导管的电极重新定位在心脏的肺动脉中。这些调整的组合也是可能的。
作为例子,刺激能量(例如,电流或电脉冲)可以具有在大约0.1毫伏(mV)和大约75伏(V)之间的电压(例如,大约0.1mV、大约0.5mV、大约1mV、大约10mV、大约100mV或者大约0.1V、大约1V、大约10V、大约20V、大约30V、大约40V、大约50V、大约60V、大约75V、1V和50V之间、0.1V和10V之间、在这些值之间的范围等)。刺激能量(例如,电流或电脉冲)还可以具有在大约1毫安(mA)到大约40mA之间的振幅(例如,大约1mA、大约2mA、大约3mA、大约4mA、大约5mA、大约10mA、大约15mA、大约20mA、大约25mA、大约30mA、大约35mA、大约40mA、在这些值之间的范围等)。刺激能量(例如,电流或电脉冲)可以以在1赫兹(Hz)和大约100000Hz或者100千赫(kHz)之间的频率传送(例如,1Hz和10kHz之间、2Hz和200Hz之间、大约1Hz、大约2Hz、大约10Hz、大约25Hz、大约50Hz、大约75Hz、大约100Hz、大约150Hz、大约200Hz、大约250Hz、大约500Hz、大约1000Hz或者1kHz、大约10kHz、在这些值之间的范围等)。电脉冲可以具有在大约100微秒(μs)和大约100毫秒(ms)之间的脉冲宽度(例如,大约100μs、大约200μs、大约500μs、大约1000μs或者1ms、大约10ms、大约50ms、大约100ms、在这些值之间的范围等)。对于占空比或者传送电脉冲的持续时间相对未传送电脉冲的持续时间的变化,电脉冲可以传送持续在大约250ms和大约1秒之间的时间(例如,大约250ms、大约300ms、大约350ms、大约400ms、大约450ms、大约500ms、大约550ms、大约600ms、大约650ms、大约700ms、大约750ms、大约800ms、大约850ms、大约900ms、大约950ms、在这些值之间的范围等),并在之后不传送持续在大约1秒和大约10分钟之间的时间(例如,大约1秒、大约5秒、大约10秒、大约15秒、大约30秒、大约45秒、大约1分钟、大约2分钟、大约3分钟、大约5分钟、大约10分钟、在这些值之间的范围等)。优化的占空比可以例如减少响应时间,增加电池寿命、患者舒适度(减少疼痛、咳嗽等)等。刺激能量(例如,电流或电脉冲)还可以具有各种波形,例如:方波、双相方波、正弦波、电性安全、有效、可行的任意限定的波形及其组合。刺激能量(例如,电流或电脉冲)可以经由多个电极至少部分同时地和/或顺序地施加到多个目标部位。
在一些示例中,刺激信号的波形是电荷平衡的恒流阴极第一双相波形,具有低阻抗闭合开关第二相电极放电。脉冲串特性例如可以包括约8mA至约20mA之间的脉冲幅度、约2ms至约8ms之间的脉冲宽度和约20Hz的脉冲频率。根据某些电极设计脉冲幅度和/或脉冲宽度可以较低。
本公开的方法可以包括指派电极配置的层级,根据其传送一个或多个电脉冲。该层级可以包括多个电极的两个或更多个预定图案(pattern)和/或组合,以用于传送一个或多个电脉冲。例如,可以使用电极配置的层级传送一个或多个电脉冲。可以分析响应于使用电极配置的层级传送的一个或多个电脉冲而感测的心脏活动特性。这样的分析可以包括例如确定电极配置的哪个层级提供了患者的心脏的最强收缩性或者相对收缩性。基于该分析,可以选择电极配置来用于传送一个或多个电脉冲通过定位于患者心脏的肺动脉中的导管。
在一些示例中,一种方法可以包括给通过定位于心脏的肺动脉中的导管传送的一个或多个电脉冲的一个或多个特性指派层级。该层级可以包括提供哪个特性(例如,一个或多个电脉冲的电极极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、或波形)将被改变的顺序以及改变多少,以及用于传送到患者心脏的电脉冲的预定数量。电脉冲的预定数量可以是例如在层级的给定特性10到100个电脉冲。对于一个或多个电脉冲的给定特性,可以针对传送到患者心脏的一个或多个电脉冲的预定数量记录一个或多个心脏活动特性。然后可以分析响应于一个或多个电脉冲而感测的心脏活动特性。例如,可以对照其他组的记录的特性和/或对照用于给定心脏活动特性和/或心脏特性(例如,收缩性和/松弛性)的预定标准,分析对于预定数量脉冲的每个组记录的特性。基于该分析,可以选择电极配置来用于传送一个或多个电脉冲通过定位于患者心脏的肺动脉中的导管。作为非限制性例子,可以施加1mA电流到电极,持续50个电脉冲,接着施加10mA电流到电极,持续50个电脉冲。可以比较1mA和10mA的响应。如果10mA工作得更好,可以施加20mA电流到电极,持续50个电脉冲,并且可以比较10mA和20mA的响应。如果10mA工作得更好,可以将10mA选择作为本发明的电流。可以使用多种多样的选择过程,包括但不限于迭代法(例如,包括进行比较,直到发现极限,在该极限处,差异可以忽略)以及蛮力法(例如,测量响应,并且在完成所有响应之后或者直到获得某个值时,选择一个量值)。对于一个或多个附加特性,这可以根据层级而重复(例如,电流之后是频率)。对于层级的每个成员,选择过程可以相同或者不同。
在一些示例中,将一系列电信号的第一电信号传送(例如,经由诸如刺激系统2101的刺激系统)到肺动脉(例如,右肺动脉、左肺动脉、肺动脉干)中的电极。在传送第一电信号之后,将该系列电信号的第二电信号传送到(例如,经由刺激系统)电极。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。例如,如果第一参数是电流,第一电信号可以具有诸如1mA的电压,第二电信号可以具有诸如2mA的不同的电压,而其他参数中的每个(例如,极性、脉冲宽度、振幅、频率、电压、持续时间、脉冲间间隔、停延时间、顺序、波长、波形和/或电极组合)是相同的。
指示一个或多个非电心脏活动特性的传感器数据可以响应于传送一系列电信号而确定(例如,经由脉管系统中的传感器(例如,作为包括电极的相同的导管的一部分,作为不同导管的一部分)、经由皮肤表面上的传感器、其组合等)。可以至少部分基于传感器数据而选择用于治疗调节的电参数。例如,选择的电参数可以包括第一参数的选择的量值。可以使用选择的电参数将治疗神经调节信号传送到肺动脉。治疗神经调节信号可以增加心脏收缩性和/松弛性(例如,超过心率)。
在一些示例中,将第一系列的电信号传送(例如,经由诸如刺激系统501的刺激系统)到肺动脉(例如,右肺动脉、左肺动脉、肺动脉干)中的电极。第一系列包括多个第一电信号。多个第一电信号中的每个包括多个参数(例如,极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形、电极组合、其子集等)。第一系列的第一多个电信号中的每个的彼此不同仅在于多个参数的第一参数(例如,第一多个电信号中的每个的极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形变化中的一个)的量值。例如,如果第一参数是电流,则所述第一系列的第一多个电信号可以由于具有不同的电流(例如,1mA、2mA、3mA、4mA等)而不同,而其他参数(例如,极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形)中的每个是相同的。
在将第一系列的电信号传送到电极之后,可以将第二系列的电信号传送(例如,经由刺激系统)到电极。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。所述第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的不同于第一参数的第二参数的量值(例如,第二多个电信号中的每个的极性、脉冲模式、脉冲宽度、振幅、频率、相位、电压、电流、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长、波形变化中的不同的一个)。例如,如果第一参数是电流,则第二参数可以与诸如频率或者占空比的定时有关。例如,在频率的情况下,所述第二系列的第二多个电信号可以由于具有不同的频率(例如,1Hz、2Hz、3Hz、4Hz等)而不同,而其他参数(例如,电流、极性、脉冲模式、脉冲宽度、振幅、相位、电压、持续时间、脉冲间间隔、占空比、停延时间、顺序、波长和波形)中的每个是相同的。
指示一个或多个非电心脏活动特性的传感器数据可以响应于传送第一系列的电信号和第二系列的电信号而确定(例如,经由脉管系统中的传感器(例如,作为包括电极的相同的导管的一部分、作为不同导管的一部分)、经由皮肤表面上的传感器、其组合等)。可以至少部分基于传感器数据而选择用于治疗调节的电参数。例如,选择的电参数可以包括第一参数的选择的量值和第二参数的选择的量值。可以使用选择的电参数将治疗神经调节信号传送到肺动脉。治疗神经调节信号可以增加心脏收缩性和/松弛性(例如,超过心率)。
可以将其他系列的电信号传送到电极,例如彼此的不同仅在于多个参数中与第一参数和第二参数不同的参数的量值。可以校准或最优化和可能被期望具有选择的值的一样多的参数。参数的顺序可以基于层级(例如,首先选择电流,然后选择频率等)。
校准或最优化过程可以执行一次(例如,当导管1830,1930被初始定位时)或者多次。例如,该过程可以周期性地或者在某个持续时间之后重复(例如,每个小时、每2个小时、每4个小时、每6个小时、每8个小时、每12个小时、每18个小时、每24个小时、每36个小时、每2天、每60个小时、每3小时等一次)。在一些实现方式中,该过程可以在检测到变化(例如,通过传感器266,366,466)时重复。例如,如果心脏活动特性变化超过某个持续时间的某个百分比(例如,在≤1分钟、≤2分钟、≤5分钟等中±10%、±25%、±50%等),这可以指示导管和/或传感器改变了位置或者系统或者患者中其他东西可能已经改变(例如,患者症状、生理状况、其他治疗方案等)。
例如,图21示出了刺激系统2101的示例。2014年5月22日提交的美国临时专利申请No.62/001,729通过引用整体并入本文,并且更具体地,将图11和第41页第5行至第42页第19行中公开的刺激系统11600通过引用并入本文。如图21中所示,刺激系统1201包括输入/输出连接器2103,其可以可释放地接合导管的导电元件、第二导管的导电元件和/或用于从患者的皮肤表面感测一个或多个心脏特性的传感器,如本文所讨论。来自传感器的输入还可以可释放地耦接到输入/输出连接器11602,以便接收本文讨论的传感器信号。导电元件和/或传感器可以永久地耦接到刺激系统(例如,不可释放地耦接)。
输入/输出连接器2103连接到模数转换器2105。模数转换器2105的输出通过包括例如地址、数据和控制线的外围总线2109连接到微处理器2107。微处理器2107可以根据使用的传感器的类型以不同方式处理传感器数据(在存在的时候)。微处理器2107还可以控制(如本文所讨论)脉冲控制输出发生器2111,其将刺激电能量(例如,电脉冲)经由输入/输出连接器2103和/或外壳2123传送到一个或多个电极。
在需要时,可以通过编程到存储器2113中并由可编程脉冲发生器2115执行的指令来控制和调整刺激电能量的参数(例如,电脉冲的特性)。存储器2113可以包括非暂时性计算机可读介质。存储器2113可以包括一个或多个存储装置,其能够存储数据并且允许微处理器2107直接访问的任何存储位置,例如,随机存取存储器(RAM)、闪存(例如,非易失性闪存)等。刺激系统2101可以包括存储装置,例如,一个或多个硬盘驱动器或者独立磁盘冗余阵列(RAID),以用于存储操作系统和其他相关的软件,并且用于存储应用软件程序,其可以是存储器2113或者不同的存储器。存储器2113中用于可编程脉冲发生器2115的指令可以经由微处理器2107基于来自传感器的输入和一个或多个心脏活动特性的分析而设置和/或修改。存储器2113中用于可编程脉冲发生器2115的指令还可以通过经由通过外围总线2109连接的输入装置2117来自专业人员的输入而设置和/或修改。这样的输入装置的例子包括键盘和/或鼠标(例如,结合显示屏)、触摸屏等。各种各样不同的输入/输出(I/O)装置可以与刺激系统2101一起使用。输入装置包括例如键盘、鼠标、触控板、轨迹球、麦克风和手写板。输出装置包括例如视频显示器、扬声器和打印机。I/O装置可以由I/O控制器控制。I/O装置可以由I/O控制器控制。I/O控制器可以控制一个或多个I/O装置。I/O装置可以为刺激系统2101提供存储和/或安装介质。刺激系统2101可以提供USB连接以接收手持式USB存储装置。刺激系统2101可选地包括通信端口2119,其连接到外围总线2109,其中数据和/或编程指令可以由微处理器2107和/或存储器2113接收。
来自输入装置2117(例如,来自专业人员)、通信端口2119和/或经由微处理器2107来自一个或多个心脏活动特性的输入可以用来改变(例如,调整)刺激电能量的参数(例如,电脉冲的特性)。刺激系统2101可选地包括电源2121。电源2121可以是电池或者由外部电源(例如,耦接到AC源的AC/DC功率转换器)供电的电源。刺激系统2101可选地包括外壳2123。
微处理器2107可以执行一个或多个算法,以便提供刺激。微处理器2107还可以由专业人员经由输入装置2117控制以启动、终止和/或改变(例如,调整)电脉冲的特性。微处理器2107可以执行一个或多个算法,以进行响应于使用电极配置的层级和/或一个或多个电脉冲的每个特性的层级传送的一个或多个电脉冲而感测的一个或多个心脏活动特性的分析,从而例如帮助识别电极配置和/或传送给患者心脏的一个或多个电脉冲的特性。这样的分析和调整可以使用过程控制逻辑(例如,模糊逻辑、负反馈等)进行,以便维持脉冲控制输出发生器2111的控制。
在一些示例中,可以用闭环反馈控制来操作刺激。在一些示例中,经由微处理器2107从闭环反馈系统接收输入。闭环反馈控制可以用于将患者的心脏参数中的一个或多个保持在编程到存储器2113中的阈值或范围处或内。例如,在闭环反馈控制下,可以比较测量的心脏参数值(一个或多个),然后可以确定测量的值(一个或多个)是否在阈值或值的预定范围之外。如果测量的心脏参数值(一个或多个)没有落于阈值或值的预定范围之外,则闭环反馈控制继续监测脏参数值(一个或多个)并且定期重复比较。但是,如果来自传感器的心脏参数值(一个或多个)指示一个或多个心脏参数在阈值或值的预定范围之外,则通过微处理器2107调整刺激电能量的一个或多个参数。
刺激系统2101可以包括一个或多个附加部件,例如,显示装置、高速缓存(例如,与微处理器2107通信)、逻辑电路、信号滤波器、次级或后段(backside)总线、局部总线、局部互连总线等。刺激系统2101可以支持任何合适的安装装置,例如,CD-ROM驱动器、CD-R/RW驱动器、DVD-ROM驱动器、各种格式的磁带驱动器、USB装置、硬盘驱动器、连接到服务器的通信装置或者适合于安装软件和程序的任何其他装置。刺激系统2101可以包括通过包括但不限于标准电话线、LAN或WAN链路、宽带连接、无线连接(例如,蓝牙,WiFi)、其组合等的各种连接与局域网(LAN)、广域网(WAN)或者因特网连接的网络接口。网络接口可以包括内置网络适配器、网络接口卡、无线网络适配器、USB网络适配器、调制解调器或者适于将刺激系统2101连接到能够通信并执行本文所述的操作的任何类型的网络的任何其他装置。在一些示例中,刺激系统2101可以包括或者连接到多个显示装置,其可以是相同或者不同的类型和/或形式。因此,I/O装置和/或I/O控制器中的任何一个可以包括任何类型和/或形式的合适的硬件、软件或者硬件和软件的组合,以支持、使能或提供连接和刺激系统2101对多个显示装置的使用。刺激系统可以与任何工作站、台式计算机、膝上型计算机或者笔记本计算机、服务器、手持式计算机、移动电话、任何其他计算机、或能够通信并具有足够的处理器能力和存储器容量以执行本文所述的操作和/或与刺激系统2101通信的其他形式的计算或者通信装置。图21中所示的箭头通常描绘了电流和/或信息的流向,但是电流和/或信息也可以根据硬件以相反方向流动。
本文中描述的分析、确定、调整等可以是闭环控制或者开环控制。例如,在闭环控制中,刺激系统可以在没有来自用户的输入的情况下分析心脏活动特性并且调整电信号特性。对于另一例子,在开环控制中,刺激系统可以分析心脏活动特性并提示由用户调整电信号特性的动作,例如,提供建议的调整或者多个调整选项。
在一些示例中,一种非治疗校准方法包括将电极定位在心脏的肺动脉中,以及将传感器定位在心脏的右心室中。该系统还包括经由刺激系统将第一系列电信号传送到电极。第一系列包括多个第一电信号。第一多个电信号中的每个包括多个参数。第一系列的第一多个电信号中的每个彼此的不同仅在于多个参数中的第一参数的量值。该方法还包括在将第一系列电信号传送到电极之后,经由刺激系统将第二系列电信号传送到电极。第二系列包括第二多个电信号。第二多个电信号中的每个包括多个参数。第二系列的第二多个电信号中的每个彼此的不同仅在于多个参数中的第二参数的量值。第二参数不同于第一参数。该方法还包括经由传感器确定指示响应于传送第一系列电信号和第二系列电信号的一个或多个非电心脏活动特性的传感器数据。该方法还包括使用选择的电参数,确定将传送到肺动脉的治疗神经调节信号。选择的电参数包括第一参数的选择的量值和第二参数的选择的量值。第一和第二参数的选择的量值至少部分基于传感器数据。
在一些示例中,一种非治疗校准方法包括将一系列电信号中的第一电信号传送到在第一解剖学位置中的电极,以及在传送第一电信号之后,将所述一系列电信号中的第二电信号传送到电极。第二电信号与第一电信号的不同在于多个参数中的第一参数的量值。该方法还包括经由在不同于第一解剖学位置的第二解剖学位置中的传感器感测指示响应于所述一系列电信号的传送的一个或多个非电心脏活动特性的传感器数据,以及使用选择的电参数,确定将传送到第一解剖学位置的治疗神经调节信号。选择的电参数包括第一参数的选择的量值。第一参数的选择的量值至少部分基于传感器数据。
在一些示例中,刺激系统可以用于帮助识别用于沿着主肺动脉、左肺动脉和/或右肺动脉的后表面、上表面和/或下表面定位一个或多个电极的优选位置。为此,导管或导管系统的一个或多个电极被引入患者,使用刺激系统沿着脉管系统的后表面、上表面和/或下表面对各种位置进行测试以便识别电极的优选位置。在这样的测试期间,刺激系统可以用于初始化并调整刺激电能量(例如,电流或电脉冲)的参数。这样的参数包括但不限于终止、增加、减少或改变刺激电能量(例如,电流或电脉冲)的流率或模式。根据患者或医疗人员的需求或经编程以响应于从患者感测的信号或信号的一部分,刺激系统还可以传输偶发性的、连续性的、阶段性的、成群的、间歇性的刺激电能量(例如,电流或电脉冲)。
开环或闭环反馈机制可以结合本公开使用。对于开环反馈机制,专业人员可以监测心脏参数并改变患者的心脏参数。基于心脏参数,专业人员可以调整施加到自主心肺纤维的电流的参数。被监测的心脏参数的非限制性示例包括动脉血压、中心静脉压、毛细管压、收缩压变化、血液气体、心输出、体循环血管阻力、肺动脉楔压、患者呼出的呼气的气体成分和/或混合静脉血氧饱和度。可以通过心电图、侵入式血液动力学监测、心回波图或血压测量或本领域已知医用测量心脏功能的其他装置来监测心脏参数。还可以监测和处理例如体温和呼吸率的其他参数作为反馈机制的一部分。
在闭环反馈机制中,通过刺激系统接收和处理患者的心脏参数,其中至少部分地基于心脏参数来调整电流的参数。如本文所述,使用传感器来检测心脏参数并生成传感器信号。由传感器信号处理器来处理传感器信号,所述传感器信号处理器向信号生成器提供控制信号。信号生成器继而可以通过激活或调整由导管向患者施加的电流的参数中的一个或多个来生成对于控制信号的响应。控制信号可以初始化、终止、增加、减少或改变电流的参数。可以使导管的一个或多个电极被用作传感器和记录电极。当需要时,这些感测或记录电极可以如本文所述地传输刺激电能量(例如,电流或电脉冲)。
刺激系统还可以进行监测以确定一个或多个电极是否已经从它们在右肺动脉内的位置移位。例如,阻抗值可以用于确定一个或多个电极是否已经从它们在右肺动脉内的位置移位。如果阻抗值的变化指示一个或多个电极已经从它们在右肺动脉内的位置移位,则由刺激系统产生警告信号并且停止电流。
在若干示例中,本文提供的导管包括多个电极,包括两个或更多个电极。可以理解,如果需要,短语“多个电极”在本文中可以用两个或更多个电极替代。对于本文公开的导管和系统的各种示例,电极可以具有各种不同配置和大小。例如,本文讨论的电极可以是完全环绕它们位于其上的主体的环形电极。本文讨论的电极还可以是部分环形,其中电极仅部分地环绕它们位于其上的主体。例如,电极可以是优选仅接触主肺动脉和/或肺动脉的腔面的部分环形电极,如本文所述。该配置可以有助于将刺激电能量按照本文讨论的方式定位到血管和相邻组织结构(例如自主纤维)中并且远离血液。本文提供的电极和导电元件可以由导电生物可相容金属或金属合金形成。这样的导电生物可相容金属或金属合金的示例包括但不限于钛、铂或其合金。其他生物可相容金属或金属合金是已知的。
对于各种示例,本文提供的导管的细长主体可以由柔性聚合物材料形成。这样的柔性聚合物材料的示例包括但不限于:医用级聚氨酯,尤其是例如,基于聚酯的聚氨酯、基于聚醚的聚氨酯和基于碳酸酯的聚氨酯;聚酰胺、聚酰胺嵌段共聚物、聚烯烃(例如,聚乙烯(例如,高密度聚乙烯));以及聚酰亚胺。
本文讨论的导管和/或导管系统中的每一个还可以包括接近存在于细长主体的一个或多个电极定位的一个或多个参考电极。这些一个或多个参考电极均可以包括从导管和/或导管系统延伸的隔离导电引线,以便允许一个或多个参考电极被用作用于通过导管和/或导管系统的细长主体上的一个或多个电极中的一个或多个被传输的电流的公用或返回电极。
关于治疗心血管医学症状,这样的医学症状可以包括与心血管系统的部件(举例来说,例如心脏和主动脉)有关的医学症状。心血管症状的非限制性示例包括梗塞后康复、休克(低血容量性、败血性、神经源性)、瓣膜病、包括急性心力衰竭的心力衰竭、心绞痛、微血管缺血、心肌收缩性障碍、心肌症、包括肺动脉高血压和系统性高血压的高血压、端坐呼吸、呼吸困难、起立性低血压、家族性自主神经异常、晕厥、血管迷走神经反射、颈动脉窦过敏、心包积液和心脏结构异常,例如中隔缺陷和壁动脉瘤。
在一些示例中,例如如本文所述的导管可以结合肺动脉导管(例如,斯旺-甘兹氏肺动脉导管)一起使用以经由肺动脉将经血管神经调节传输到自主目标部位从而治疗心血管症状。在某些这样的示例中,导管(或多个导管)可以容纳在肺动脉导管的多个内腔中的一个内。
除了本公开的导管和导管系统之外,一个或多个感测电极可以位于患者上或患者内。其他用途之外,感测电极尤其可以用于检测指示各种心脏参数的改变的信号,其中这些改变可能是传递刺激电能量的脉冲以刺激主肺动脉和/或肺动脉中的一个或两个周围的神经纤维(例如,自主神经纤维)的结果。在其他参数之外,这样的参数尤其包括但不限于患者的心率(例如,脉搏)。感测电极还可以提供指示脉管系统的一个或多个电参数(心动周期的电活动)的改变的信号。可以收集和显示这样的信号,如所知,使用已知装置(例如,心电图(ECG)监测器)或本文讨论的刺激系统,其接收检测的信号并且提供关于患者的信息。
还可以对患者使用其他传感器以检测和测量指示各种心脏参数的改变的各种不同其他信号。这样的参数可以包括但不限于血压、血氧水平和/或患者呼出呼气的其他成分。例如,本公开的导管和导管系统还可以包括压力传感器,其定位在可膨胀球囊的膨胀内腔内或定位成与可膨胀球囊的膨胀内腔成直线。来自压力传感器的信号可以用于检测和测量患者的血压。替代地,本公开的导管和导管系统可以包括用于感测和测量血压和/或血氧水平的集成电路。这样的集成电路可以使用0.18μm CMOS技术来实现。可以用已知的光学或电化学技术来测量氧气传感器。这样的氧气传感器的示例包括反射或透射式脉搏血氧计,它们使用在测量波长光学传感器中吸收率的改变以帮助确定确定血氧水平。对于这些不同示例,导管的细长主体可以包括传感器(例如,血氧传感器和/或压力传感器)和延伸通过每个细长主体的一个或多个导电元件,其中导电元件传导来自血氧传感器和/或压力传感器的电信号。
检测的信号还可以由刺激系统用于响应于检测的信号提供刺激电能量。例如,这些信号中的一个或多个可以由刺激系统用于将刺激电能量输送到导管或导管系统的一个或多个电极。因此,例如可以使用感测电极和/或受试者的血压的定时参数来感测来自患者的心动周期的检测信号(例如,ECG波、波段、波间隔或ECG波的复合)。刺激系统可以接收这些检测信号并且基于(一个或多个)信号的特征生成刺激电能量并将其传输到导管或导管系统的一个或多个电极。如本文所述,刺激电能量具有足够的电流和电势以及足够的持续时间以刺激主肺动脉和/或肺动脉中的一个或多个周围的一个或多个神经纤维从而向患者提供神经调节。
图22A是导管的一部分2200的示例的透视图。图22B是图22A的部分2200的侧正视图。图22C是图22A的部分2200的远端视图。图22C是图22A的部分2200的近端视图。部分2200可以耦接到导管(一体化(all-in-one)导管或伸缩导管)或形成导管的一部分,例如,如本文所述。
部分2200包括在点2206处耦接的第一切割海波管2202和第二切割海波管2204。如同可能对于本文描述的任一切割海波管来说是适当的,可以切割片材并将其卷成具成为管的中间形状设置或直接成为最终形状的海波管。第一切割海波管2202包括圆柱形(例如,未切割)部分2208和多个样条2210。第二切割海波管2204包括圆柱形(例如,未切割)部分2212和多个样条2214。如在图22B中最佳可见的,样条2210是凸形的而样条2214是凹形的。
在图22A和22B中示出的示例中,样条2210的远端在点2206处从样条2214的远端向内但是接近样条2214的远端径向耦接。在一些示例中,样条2210的远端可以甚至进一步径向向内耦接到样条2214。在一些示例中,样条2214的远端可以从样条2210的远端径向向内耦接。点2206可以接近样条2210的远端和样条2214的远端(例如,如图22A和22B所述),在样条2214的远端和沿着样条2210的点(例如,近似纵向中点、更靠近远端的长度的约75%等)之间或在样条2210和沿着样条2214的点之间(例如,包括样条2214被配置为在点2206远端是凸形的示例)。
如图22C和22D所述,圆柱形部分2212从圆柱形部分2208径向向内伸缩。圆柱形部分2212具有比圆柱形部分2208小的直径。当圆柱形部分2208和圆柱形部分2212相对地彼此远离移动时(例如,通过第二切割海波管2204的远端推进和/或第一切割海波管2202的近端缩回),样条2204径向向外推动样条2210。
图22A-22D示出了六条样条2210和六条样条2214。其他数量的样条可以可能的(例如,2至12之间(例如,这样的值之间约2、3、4、5、6、7、8、9、10、11、12的范围等))。样条2210,2214可以均匀地周向间隔,或者一些样条2210,2214在轴向上可以更近。样条2210,2214可以提供约60°至360°的周向覆盖(例如,约60°、约90°、约120°、约180°、约210°、约240°、约270°、约300°、约360°、这样的值之间的范围等)。如果部分2200可旋转以找到目标神经,则周向覆盖可以可选地在范围的下端。如关于图22E所述,样条2210中的至少一些可以包括电极。其他样条2210可以没有电极或包括不被使用的电极,但是可以充当贴近臂(例如,当由于导航路径的刚性和自然路线样条2210不被推向血管的一侧的情况下),这可以帮助抵靠或靠近组织推动电极。
图22E至22G是包括图22A的部分2200的导管2220的示例的侧局部横截面视图。样条2210包括电极2222,例如在外表面上、环状地在周围、在U形通道中(例如,如本文所述)、作为网格覆盖的一部分(例如,如关于图4C所述)等。在一些示例中,样条2210的包括电极的各个部分的长度在约20mm至约40mm之间(例如,约20mm、约25mm、约30mm、约35mm、约40mm、这样的值之间的范围等)。第一切割海波管2202耦接到套管或护套2226。第一切割海波管2202可以耦接在套管2226的内腔中(例如,如图22E和22G所示),在套管2226的外侧上,端对端地耦接、通过系链耦接等。套管2226可以具有约7Fr至约11Fr之间的直径(例如,约7Fr、约8Fr、约9Fr、约10Fr、约11Fr、这样的值之间的范围等)。第二切割海波管2204耦接到内部构件2224。第二切割海波管2204可以耦接在内部构件2224的内腔中(例如,如图22G所示),在内部构件2224的外侧上,端对端地耦接、通过系链耦接等。图22G以横截面示出第一切割海波管2202以示出第二切割海波管2204和内部构件2224之间的耦接。内部构件2224(并且因此第二切割海波管2204)和套管2226(并且因此第一切割海波管2202)之间的相对移动可以使得样条2210径向折区(例如,套管2226的近端缩回和/或内部构件2224的远端推进可以使得样条2210径向向外折区,内部构件2224的近端缩回和/或套管2226的远端推进可以使得样条2210径向向内折区),如图22F所示。由于样条2214可以径向向外推动样条2210,所以样条2210可由没有锥度,这可以减小导管2220的轮廓和长度和抛距(throw distance)。在一些示例中,样条2210在扩张状态下的直径2225在约15mm至约35mm之间(例如,约15mm、约20mm、约25mm、约30mm、约35mm、这样的值之间的范围等)。
样条2210处于塌缩位置(图22F)的导管2220的一个潜在优点在于在发生故障(例如,近端断裂)的情况下,样条2210向内塌缩而不是扩张。也就是说,塌缩状态是默认状态,其例如在导管2220经过瓣膜、腱索等时可以比扩张状态作为默认状态安全。不使用形状记忆材料的一个潜在优点是当由于纵向移动可能扩张时减少成本。
在一些示例中,样条2210可以自扩张,例如能够在移除来自内部构件2224的力时扩张。当目标血管短(例如肺动脉)时,减少的长度可能是有用的。相对移动可以是手动的,或者例如如本文所述是弹簧辅助的。
在一些示例中,导管2220可以包括与部分2200分离的固定系统。例如,固定系统可以延伸通过第二切割海波管2204的内腔。固定系统可以能够相对于部分2200轴向和旋转移动,这可以有用于提供适当的固定和神经瞄准。一旦用户满意部分2200和固定系统的位置,部分2200和固定系统就可以被耦接(例如,在受试者外部的手柄处)。甚至是一旦被耦接,部分2200和固定系统就可以能够彼此相对旋转(例如,±20°)和/或纵向移动(例如,±1cm、±2cm)。甚至在固定机构不移动时部分2200也可以移动以改善神经瞄准,这可以减少组织干扰。在一些示例中,样条2214的远端可以提供替代或附加固定。
在一些示例中,样条2210、样条2204或部分2200或导管2200的其他部分包括传感器(例如,压力传感器、收缩性传感器等)。
在一些示例中,近端手柄的旋转例如归因于导管形状、屈曲或其他因素在导管2220的远端赋予不是1:1的纵向移动和/或旋转移动。
图22H至22L是导管部署系统2230,2240的示例的侧正视图和局部横截面视图。在图22H至22J中,示出了导管部署系统的近端或手柄。在图22K和22L中,示出了导管部署系统的近端或手柄。导管部署系统2230,2240可以例如与导管2220一起使用。
系统2230包括弹簧2232。弹簧邻接夹持器2234,夹持器2234耦接到内部构件2224。弹簧2232具有负弹簧常数(回复力向内),但是通过布置其他特征具有正弹簧常数(回复力向外)的弹簧也是可以的。为了使样条2210扩张,对抗弹簧2232的力相对于套管2226远端地推动例如握把的手柄元件2236。系统2230可以包括锁定机构2238,锁定机构2238配置为将手柄元件2236保持在远端位置。在系统2230中,在系统2230中出现断裂的情况下(例如,锁定机构2238发生故障),弹簧2232缩回内部元件2224,使样条2210塌缩,这可以允许导管2230容易回收。例如归因于由弹簧2232提供的力,与单单手动的结构相比,弹簧2232提供一个范围的部署选项。
图22I示出了包括可以弹性地将手柄元件2236保持在远端位置的多个臂的锁定机构2238的示例。臂可以在远端打开,并且手柄元件2236(例如,整个手柄元件2236)可以抓获在臂中。当线条将要被塌缩时,可以打开臂,允许弹簧2232远端地逼迫手柄元件2236,使内部元件2224缩回并使样条2210塌缩。
图22J示出了包括可以弹性地将手柄元件2236保持在远端位置的多个臂的锁定机构2238的另一示例。臂可以在近端关闭。臂可以被径向向外偏置以促进径向扩张。臂可以充当辅助板弹簧。在一些示例中,手柄元件2236和锁定机构2238的关闭近端包括 磁体、螺纹或其他特征以将手柄元件2236保持在远端位置。当线条将要被塌缩时,可以脱离手柄元件2236,允许弹簧2232(和臂)远端地逼迫手柄元件2236,使内部元件2224缩回并使样条2210塌缩。在一些示例中,压缩臂可以使得手柄元件2236脱离。
磁体、螺纹或其他特征以将手柄元件2236保持在远端位置。当线条将要被塌缩时,可以脱离手柄元件2236,允许弹簧2232(和臂)远端地逼迫手柄元件2236,使内部元件2224缩回并使样条2210塌缩。在一些示例中,压缩臂可以使得手柄元件2236脱离。
系统2240包括弹簧2242。弹簧邻接夹持器2244,夹持器2244耦接到内部构件2224。弹簧2242具有正弹簧常数(回复力向内),但是通过布置其他特征具有正弹簧常数(回复力向外)的弹簧也是可以的。
在图22K中,为了使样条2210扩张,对抗弹簧2242的力相对于套管2226远端地拉动耦接到内部构件2224的手柄元件。拉动元件2246耦接到内部构件2224。拉动元件2246耦接到样条2247(例如,类似于样条2214但是在取向上相反以使得样条2247在塌缩状态下远端地延伸)。当近端地拉动拉动元件2246时,样条2247径向向外扩张,将样条2210径向向外推动到扩张状态。
在图22L中,样条2210具有稍微锥形的形状以使得拉动元件2246可以在塌缩状态下搁置在样条2210之间并且在缩回期间与样条2210相互作用。为了使样条2210扩张,对抗弹簧2242的力相对于套管2226远端地拉动耦接到内部构件2224的手柄元件。拉动元件2246耦接到内部构件2224。当近端地拉动拉动元件2246时,拉动元件2246的近端靠在样条2210的内侧表面上,将样条2210径向向外推动到扩张状态。
在图22K和22L的系统2240中,在系统2230中出现断裂的情况下,弹簧2242推进内部元件2224,使样条2210塌缩,这可以允许导管2230容易回收。例如归因于由弹簧2242提供的力,与单单手动的结构相比,弹簧2242提供一个范围的部署选项。
图22M示出了图22A的部分2200的示例性部件2250。不是第一切割海波管2202,部件2250包括耦接到成形为样条2210的多个丝线2254的海波管2252。橙色丝线2254o示出了处于打开或扩张状态的样条2210的形状,而灰色丝线2254g示出了处于关闭或塌缩状态的样条2210的形状。像第一切割海波管2202的样条2210一样,丝线2254可以包括形状记忆材料(例如,镍钛诺)和/或可以通过第二切割海波管2204或类似装置移动到扩张位置。参考图22E和4C,部件2250可以在丝线2254上、在附接到丝线2254的网格上或其组上等包括电极。
图23A是支柱的示例性部段2300的透视图。部段2300大体具有U形形状。部段2300包括至少部分地限定通道或槽2304的壁2302。壁2302和槽2304可以以各种不同方式形成。在一些示例中,丝线可以以U形形状挤出。在一些示例中,可以切割海波管以形成大体矩形的支柱,并且可以从支柱移除材料(例如,通过铣削)来形成槽204。在一些示例中,平坦丝线的侧部可以向上屈曲。在一些示例中,U形形状可以包括塑料(例如,挤出、模制等)。槽2304可以与绝缘材料成直线。在一些示例中,绝缘材料包括环氧树脂。在一些示例中,与绝缘材料成直线的槽2304可以帮助电极定向,这可以有助于将能量瞄准在血管壁处和神经处。多个丝线或引线或导体2306可以位于槽2304中。将丝线2306定位在槽2304中可以帮助制造(丝线2306的定位),可以降低导体可能串扰的风险和/或可以防止丝线2306断裂。丝线2306电连接到可以用于提供神经调节的电极、换能器等。图23B-23F示出可以用于将丝线2306、绝缘体和电极2308至少部分地定位在支柱的U形部段中的配置的示例。在一些示例中,U形部段可以耦接到支柱(例如,粘附、熔焊、钎焊、过盈配合等)。
槽2304可以具有约0.003英寸至约0.02英寸之间的深度2370(例如,约0.003英寸,约0.005英寸,约0.01英寸,约0.015英寸,约0.02英寸,这样的值之间的范围等)。槽2304可以具有约0.15英寸至约0.1英寸之间的宽度2372(例如,约0.015英寸,约0.02英寸,约0.025英寸,约0.05英寸,约0.06英寸,约0.08英寸,约0.1英寸,这样的值之间的范围等)。
图23B是支柱2320的示例的横向横截面视图。支柱2320包括至少部分地限定槽的壁2302。在一些示例中,壁2302形成配置为至少部分地侧向覆盖电极2308的深度2370。多个丝线2306位于槽中。丝线2306被隔离片材或插入件2310覆盖。丝线2306中的每一个可以涂覆有隔离材料和/或隔离片材2310可以为丝线2306提供隔离。在丝线2306和电极2308之间的焊缝处或结合点处的隔离可以抑制或防止来自体液的损伤和侵蚀。电极2308通过隔离片材2310电连接到丝线2306之一。图23B所示电极2308具有矩形横截面。图23C示出了在其中电极2308具有圆形横截面(例如,被成形为圆顶)的支柱2325的示例的横向横截面视图,其可以有助于减少由于尖锐边缘的边缘效应和热点。在电极2308包括尖锐边缘的示例中,隔离材料可以至少部分地覆盖尖锐边缘,这可以有助于减少边缘效应。电极2308可以被沉入隔离材料的孔中使得仅暴露顶表面,这可以有助于电极2308定向。电极2308以及本文描述的所有电极可以没有尖锐边缘和/或没有未被隔离材料覆盖的尖锐边缘。
图23D是支柱2330的另一示例的横截面视图。支柱2330包括至少部分地限定槽的壁2302。多个丝线2306位于槽中。丝线2306被隔离层2312覆盖。隔离层2312可以包括例如硅树脂或任何合适的隔离柔性材料。丝线2306中的每一个可以涂覆有隔离材料和/或隔离层2312可以为丝线2306提供隔离。电极2308通过隔离层2312电连接到丝线2306之一。电极2308可以具有与隔离层2312相同的高度。隔离层2312可以包括圆顶形状。
图23E是支柱2340的又另一示例的横向横截面视图。支柱2340包括至少部分地限定槽的壁2302。多个丝线2306位于槽中。丝线2306被隔离层2314覆盖。隔离层2314可以包括例如硅树脂或任何合适的隔离柔性材料。丝线2306中的每一个可以涂覆有隔离材料和/或隔离层2314可以为丝线2306提供隔离。电极2308通过隔离层2314电连接到丝线2306之一。电极2308可以具有与隔离层2314相同的高度。隔离层2312可以包括大体平坦或平面上表面。
图23F是支柱2350的再另一示例的横向横截面视图。支柱2350包括至少部分地限定槽的壁2302。多个丝线2306位于槽中。丝线2306被隔离层2316覆盖。隔离层2316可以包括例如硅树脂或任何合适的隔离柔性材料。丝线2306中的每一个可以涂覆有隔离材料和/或隔离层2316可以为丝线2306提供隔离。电极2308通过隔离层2316电连接到丝线2306之一。隔离层2316可以包括大体凸出表面。电极2308可以被埋入隔离层2316中,这可以有助于减少边缘效应。减少边缘效应可以提高从电极2308发射的电场的均匀性。在隔离层2316的上表面下方的电极2308可以与组织间隔,这可以允许跨过电极2308的血液流动。
隔离层2312,2314,2316可以保持丝线2306在U形槽中的位置,例如抑制缠结和/或保持空间分离。隔离层2312,2314,2316可以保护丝线2306免受体液和外力的伤害。
隔离层2312,2314,2316可以沉积在槽中丝线2306上方。隔离层2312,2314,2316可以被熟化然后消融(例如,激光消融、铣削)以允许将电极2308和连接器定位于其上。在一些示例中,插塞(例如,包括不粘贴到隔离层2312,2314,2316的材料的材料,例如PTFE)可以定位在隔离层2312,2314,2316中并且然后在熟化之后被去除以允许将电极2308定位到其处。
图23G是支柱的示例性部段2360的俯视局部横截面视图。如图所示,丝线2306在空间上分离。在丝线2306不被单独地隔离的示例中,隔离材料可以抑制或阻止丝线2306之间的电连通。第一丝线2306a连接到第一电极2308a。第二丝线2306b连接到第二电极2308b。第三丝线2306c连接到第三电极(未示出)。
图23H示出了包括多个支柱或样条2382的支柱系统2380的示例,其中多个支柱或样条2382均具有大体U形槽。U形槽可以帮助对齐或保持支柱2382之间的间距或分离距离。图23I示出了其中第一支柱2382a和第二支柱2382b之间的距离小于第三支柱2382c和第二支柱2382b之间的距离b的示例。图23J示出了其中第一支柱2382a和第二支柱2382b之间的距离与第三支柱2382c和第二支柱2382b之间的距离b大致相同的示例。在一些示例中,支柱之间的距离b或支柱到支柱的间距2374可以在约10mm至约15mm之间(例如,约10mm、约11mm、约12mm、约13mm、约14mm、约15mm、这样的值之间的范围等)。在U形形状的情况下,与圆形丝线样条系统相比,样条2382可以在径向配置中曲折较少,这可以有助于保持样条之间的间距更加一致,不管间距打算为一致或变化。U形形状可以降低样条2382相对于彼此滑动并且在每个样条2382中的电极2308相对于彼此滑动的可能性,这可以保持电极的间距。
图23K示出了丝线系统2390上的电极的示例。系统2390包括丝线2392和丝线2392上的电极2394(例如,从丝线2392径向向外,圆环形地或弧形地在丝线2392周围)。丝线2392可以包括形状记忆材料(例如,镍钛诺)。电极2394可以包括例如铂-铱电极。用于丝线2392和电极2394的其他材料也是可能的。系统2390可以在丝线2392和电极2394之间包括绝缘体2396。电极2394可以电耦接到导体丝线2398。在一些示例中,单个丝线2392可以包括多个电极2394,例如形成阵列。
图23L是与血管壁2397间隔的电极2308的横截面视图。血管与神经2399间隔。电极2308可以尽可能靠近血管壁2397定位以使得电极2308尽可能靠近神经2399。在一些示例中,可以有意地将电极2308与血管壁2397间隔距离d,这可以允许血液在电极上方和下方流动,例如由细箭头所示。在一些示例中,距离d在约0.1mm至约1mm之间(例如,约0.1mm、约0.2mm、约0.3mm、约0.5mm、约0.7mm、约0.9mm、约1mm、这样的值之间的范围等)。再次参考图23F,隔离材料2316例如可以充当间隔件。允许血液在电极2308上方流动可以抑制对电极2308的侵蚀。允许血液在电极2308上方流动可以允许血液在电极2308的区域中接触血管壁2397以使得可以补充单元。在一些示例中,电极可以包括纵向通道、凹凸表面等以允许血液从电极2308径向向外流动但是仍然较靠近神经2399。在某些这样的示例中,可以有利地增加电极2308的表面区域。
图23Ni至23Nix示出了在基板2301上制造部件的示例性方法。基板2301可以例如包括形状记忆合金,例如形成电极系统的样条的镍钛诺。柔性电路处理可以用于在样条上图案化电极、导体、绝缘体和其他部件(例如,电阻器)。在图23Ni中,包括绝缘材料(例如,氧化物、聚酰亚胺)绝缘层2303沉积在基板2301上方。如果基板2301是绝缘的,则可以省略层2303。当关于图23Ni-23Nix使用时,术语“上方”可以指当从某个取向观察时在……上或直接在……上,并且无意限制介于中间的层,并且术语“层”可以指多个层(例如,包括粘合层)。在图23Nii中,包括导电材料(例如,铝、铜和掺杂硅)的导电层2303沉积在绝缘层2303上方。在图23Niii中,导电层2305被图案化为导体丝线2306(例如,使用光刻、剥离刻等)。在一些示例中,可以直接形成导体丝线2306(例如,使用丝网印刷、喷墨印刷等)。在图23Niv中,包括绝缘材料(例如,氧化物、聚酰亚胺)绝缘层2307沉积在导体丝线2306和绝缘层2303上方。绝缘层2303,2307的绝缘材料可以相同或不同。在图中23Nv,在绝缘层2307中形成(例如,通过蚀刻、铣削)过孔2311,从而暴露中间到体丝线2306的一部分。在图23Nvi中,包括导电材料(例如,铝、铜和掺杂硅)的导电层2309形成在绝缘层2307上方并且填充过孔2311。导电层2305,2309的导电材料可以相同或不同。在图23Nvii中,导电层2309被图案化到电极2308中。湿法刻蚀例如可以帮助形成电极2308的圆顶形状。尽管未示出,但是过孔2311可以形成为将每个导体丝线2306连接到不同电极2308。在图23Nviii中,绝缘层2313(例如,包括氧化物、聚酰亚胺)形成在电极2308和绝缘层2307上方。绝缘层2303,2307,2313的绝缘材料可以相同或不同。在图23Nix中,绝缘层2313已经被图案化为暴露电极2308并且形成包括大体凸出表面的绝缘层2316。被埋入绝缘层2316中的电极2308可以帮助减少边缘效应,这可以提高从电极2308发射的电场的均匀性。电极2308还可以通过绝缘层2316的上表面与组织间隔,这可以允许血液跨电极2308流动。在一些示例中,可以省略绝缘层2316。在一些示例中,可以在绝缘层2307中形成双镶嵌结构,并且电极2308可以形成在绝缘层2307中,其可以被成形为具有凸出表面。各种各样不同的层、图案和过程可以用于形成所描述的部件和其他部件。例如,可以接近基板2301图案化电阻器层,这可以提供局部加热,可以使得形状记忆基板局部变形为奥氏体状态。
尽管不打算进行限制,但是以下电极尺寸可以足以生成归因于神经刺激的血液动力学响应。可以假定约一半电极接触血管并且可以假定约一半电极被暴露于低阻抗血流。再次参考图23G的正视图作为示例,电极2806的长度可以在约1mm至3mm之间(例如,约1mm,约1.5mm,约2mm,约2.5mm,约2mm,这样的值之间的范围等);电极2806的宽度可以在约1mm至约4mm之间(例如,约1mm,约2mm,约3mm,约4mm,这样的值之间的范围等);并且电极2806之间的间距可以在约2mm至约8mm之间(例如,约2mm,约3mm,约4mm,约5mm,约6mm,约7mm,约8mm,这样的值之间的范围等)。电极之间的间距可以指近端电极的远端和远端电极的近端之间的距离,一个电极的中心和另一个电极的中之间的距离和/或周向或侧向间隔电极之间的距离。电极2308可以被配置为将电荷密度保持在对于Pt/Ir1,2,3小于约400μC/cm2的电化学稳定水平。再次参考图23G作为环形电极的示例,电极2394可以具有约7Fr(约2.3mm)的直径,具有约1.5mm的长度并且间隔约8mm。在一些示例中,电极2394可以具有约1mm至约3mm之间的长度(例如,约1mm,约1.5mm,约2mm,约2.5mm,约2mm,这样的值之间的范围等),约0.5mm至约1.5mm之间的直径(例如,约0.5mm,约0.75mm,约1mm,约1.25mm,约1.5mm,这样的值之间的范围等)和约1mm至约3mm之间的间距(例如,约1mm,约1.5mm,约2mm,约2.5mm,约2mm,这样的值之间的范围等)。
目标神经可以是经由神经刺激要捕获的非常小目标。与通过侧向定位相比如果不同通过深度,电极(最优可能是阴极)可能需要非常靠近神经。提供靠近的侧向定位的一个选项是具有效果上无限数量的电极或可以关于目标血管覆盖神经的所有可能区域的至少一个电极矩阵。提供靠近的侧向定位的另一个选项是提供可重新定位电极,例如可以被延伸、缩回和/或旋转的矩阵中的电极。
图23M示出示例性电极矩阵。电极边缘对边缘地近端-远端并且上面-下面间隔约2mm。初始目标区域估计可以为近端-远端15mm并且侧向19mm那么大。在一些示例中,例如如图23M所示,电极矩阵具有这些尺寸,鉴于目标区域的大小,其可以实际上起到无限数量电极的作用。在一些示例中,电极矩阵可以具有较小尺寸并且可以被旋转和/或纵向移动。尽管在图23N中以二维来示意,但是在一些示例中,电极矩阵具有采取三维形状(例如,顺应血管的内侧壁)。在某些这样的示例中,电极矩阵可以覆盖血管壁的圆周的约15°至约360°之间(例如,约15°,约30°,约45°,约60°,约75°,约90°,约105°,约120°,约180°,约210°,约270°,约300°,约360°,这样的值之间的范围等)。e值指示高于基线血液动力学响应的百分比。电极C5和C4之间e1的值为3.0%。电极C4和C3之间e2的值为12.1%。电极D6和D5之间e3的值为18.5%。电极D5和D4之间e4的值为40.2%。电极D4和D3之间e5的值为23.7%。电极E5和E4之间e6的值为0%。电极E5和E3之间e7的值为0.3%。电极C4和D4之间e8的值为28.9%。电极C3和D3之间e9的值为21.3%。电极C2和D2之间e10的值为7.1%。
当激励从一段电极移动到相邻空间对时,血液动力学响应减小约一半。当中心到中心的间距为3.5mm时,这样意味着一旦已经确定最优目标,则电极矩阵在3.5mm量级的移动将显著地减小血液动力学响应。本文描述的某些固定系统可以在治疗施用时段上将电极移动限制到小于该变化的大小的量级(例如,约0.035mm的总电极迁移)。在一些示例中,固定系统可以将电极迁移抑制到小于约1mm,小于约0.5mm,小于约0.25mm,小于约0.1mm,小于约0.075mm,小于约0.05mm,小于约0.035mm,小于约0.025mm,或小于约0.015mm,其中这样的“小于”范围的下限为0mm。
在一些示例中,电极矩阵(例如,包括用于校准刺激和/或治疗刺激的电极的一部分)可以具有约10mm2至约15mm2之间的面积(例如,约10mm2、约11mm2、约12mm2、约13mm2、约14mm2、约15mm2、这样的值之间的范围等)。在一些示例中,电极矩阵可以具有约10mm2至约300mm2之间的面积(例如,约10mm2、约50mm2、约100mm2、约150mm2、约200mm2、约250mm2、约300mm2、这样的值之间的范围等)。
图24A示出了固定系统2400的示例。固定系统2400包括固定结构2402和固定机构2404。固定结构2402可以例如包括已经被切割并且形状设置成多个臂的海波管、已经被形状设置成多个臂的丝线等。臂可以相同或不同(例如,如图24A所示,一个臂可以向上曲折)。固定机构2404可以例如包括从固定结构2402径向向外指向的点或倒钩。固定机构2404可以与固定结构2402成一体或耦接到固定结构2402。
图24B和24C示出了与导管2406相互作用的图24A的固定系统2400。当固定结构2402和导管2406彼此纵向移动(例如,缩回固定结构2402和/或推进导管2406)时,固定结构2402的臂径向向内移动。固定机构2402在该相互作用期间可能会损伤组织。固定机构2402可以抓接在导管2406上(例如,在导管2406端部开始)并且可以深入到导管2406中以形成沟槽,其可以释放导管残余,使用更多纵向相互作用力等。在一些示例中,导管2406可以包括配置为容纳固定机构的凹槽或通道,但是由固定结构2402提供的径向向外力仍然可能组织损伤和/或沟槽2408。
图25A是固定系统2500的另一示例的透视图。图25B是图25A的固定系统2500的侧正视图。图25C是图25A的固定系统2500的端视图。固定系统2500包括固定结构2502和固定机构2504。固定结构2502可以例如包括已经被切割和形状设置的海波管、已经被形状设置的带状物等。固定机构2504可以例如包括归因于包括旋转或扭转2510的固定结构2502在部署位置或状态中径向向外指向的并且在约束位置或状态中径向向内指向的点或倒钩。旋转2510可以在约60°至约300°之间(例如,约60°,约90°,约120°,约150°,约180°(例如,如图25A-25C所示),约210°,约240°,约270°,约300°,这样的值之间的范围等)。在一些示例中,固定结构2502包括形状记忆材料并且旋转2510被赋予为形状设置的至少一部分。固定机构2504可以与固定结构2502成一体或耦接到固定结构2502。
图25D和25E示出了与导管2506相互作用的图25A的固定系统2500。当固定系统2500相对于导管2506纵向移动时,固定结构2502相对于纵向轴线旋转。固定机构2502(其在导管2506中径向内向面向)旋转以在从导管2506延伸出时径向向外面向。相反,固定机构2502(其在导管2506之外径向内外面向)旋转以在缩回导管2506中时径向向内面向。固定结构2502可以径向向外偏置以推抵导管2506的内腔。
图25F示出了导管2506的示例,其包括具有配置为容纳固定结构2502和固定机构2504的形状的内腔2512。内腔2512例如可以包括配置为与矩形固定结构2502的三侧和从固定机构2502的另一侧延伸的指向固定机构2504相互作用的五边形。内腔2512的其他形状也是可能的。例如,再次参考图25C,内腔2512可以包括配置为与矩形固定结构2502的两侧相互作用的大体弧形形状。
图25G-25J示出了将固定结构2502和固定机构2504从图25F的导管2506部署出的示例。如图25G所示,当固定结构2502和固定机构2504初始从导管2510的内腔2512部署出时,在扭转2510仍然处于内腔2512中的情况下,固定机构2504径向向内面向。如图25H所示,当扭转2510在内腔2512之外时,固定机构2504可以开始径向向外转动。图25I示出了当扭转2510进一步远离内腔2512时固定机构2504继续径向向外转动,这允许固定结构2502的形状旋转。图25J示出了径向向外面上或挺立的固定机构2504。在一些示例中,固定结构2502和固定机构2504可以从导管2506的端部部署出。在一些示例中,固定结构2502和固定机构2504可以从导管的侧部部署出。
图26A是导管系统2600的示例的侧正视图。导管系统2600包括固定系统2602和电极系统2604。固定系统2602可以包括径向向外延伸特征,例如,如本文所述。电极系统2604可以包括支架和电极,例如,如本文所述。在图26A所示的示例中,电极系统2604包括系链2605,其可以帮助定位在护套2606中和从其出来。固定系统2602在电极系统2604远端。
图26B至26H示出了部署图26A的导管系统2600的示例性方法。这是通过丝线或逐步式放置方法的示例,其中球囊用于放置导丝,其提供将部件引导目标位置的轨道。
在图26A中,包括远端球囊2614的斯旺-甘兹氏导管2612浮动到目标区域。例如,斯旺-甘兹氏导管2612可以在未扩张状态下被插入到颈内静脉(左或右)的接入点中,然后被膨胀,之后其可以通过血流被携带到目标部位,例如肺动脉(左、右肺动脉或肺动脉干)。在一些示例中,斯旺-甘兹氏导管2616是具有1.5cm3球囊的8Fr斯旺-甘兹氏导管,例如其可以从爱德华生命科学公司获得。在图26C中,导丝2616被传送通过斯旺-甘兹氏导管2612的内腔直到导丝2614的远端从斯旺-甘兹氏导管2612的远端伸出。在图26D中,撤回斯旺-甘兹氏导管2616,留下导丝2616。
在图26E中,包括在系链2622的远端的固定系统2602的固定导管2620通过导丝2616而被推进并且固定系统2602得以部署。在一些示例中,固定导管2620为8Fr或9Fr。在图26F中,撤回导丝2616和固定导管2620,留下就位的固定系统2602和系链2622。在图26G中,包括电极系统2604的护套2606通过系链2622而被推进。在一些示例中,固定系统2602和护套2606的远端之间的距离可以是已知的,例如根据近端标记。在图26H中,近端地缩回护套2606以部署电极系统2604。在一些示例中,电极系统2604在扩张状态中具有约25mm的直径。固定系统2602和电极系统2604可以耦接在例如近端。在一些示例中,电极系统2604能够相对于固定系统2602移动。以串行方式部署导管(目标位置,然后固定系统,然后电极系统)可以允许导管直径较小和灵活性(例如,与一体化或组合系统相比)。
为了撤回系统,可以颠倒步骤,其中省略一些接入步骤。例如,例如归因于系链2605,可以远端地推进护套2606以捕获电极系统2604,从而帮助将电极系统2604拖动到护套2606中。然后可以撤回包括电极系统2604的护套2606。可以通过系链2622推进固定导管2620以捕获固定系统2602,并且可以撤回包括固定系统2602的固定导管2620。在该实例性方法中的尺寸无意限制于任何特定示例(例如,参见为这些类型的元件在本文提供的其他尺寸)。
在一些示例中,单个导管可以包括固定系统2602和电极系统2604(例如,允许图26E-26H的集成)。在一些示例中,固定系统2602可以在电极系统近端。
在一些示例中,固定系统2602可以被锚固在远端右肺动脉中(例如,在部署固定系统2602之间尽可能延伸地递送固定导管2620),并且电极系统2604可以部署在更近端位置。在远端右肺动脉中的固定更稳定和/或可重复。电极系统2604能够可以重新定位(例如,能够滑动、旋转)以映射而不修改固定系统2602的位置。近端毂可以包括锁定机构以将电极系统2604保持在设置位置和/或贴近装置可以固定电极系统2604。
图27A是固定系统2700的另一示例的透视图。图27B是图27A的固定系统2700的一部分的正视图。固定系统2700包括固定结构2702和固定机构2504。固定结构2702可以例如包括已经被切割和形状设置的海波管、已经被形状设置的带状物等。固定结构2702可以被形状设置为例如在不受导管2706约束时径向向外张开。固定机构2704被示出为包括圆锥形结构,但是可以包括其他形状,例如点或倒钩。固定系统2704通过固定臂2703耦接到固定结构2702。在一些示例中,固定臂2703可以与固定结构2702成一体或整体,例如从固定结构2702铣削。在一些示例中,固定臂2703具有与固定结构2702相同的厚度。在一些示例中,固定臂2703具有与固定结构2702不同的厚度,以例如提供不同塌缩特性。在一些示例中,固定臂2703可以单独形成并且然后耦接到固定结构2702,例如通过熔焊、钎焊等耦接到固定结构2702在已经在固定结构2702中铣削出的洞或孔中。在一些示例中,固定臂2703可以与固定机构2704成一体或整体,例如二者都从同一块材料(例如,固定结构2702)铣削。在一些示例中,固定臂2703可以单独形成并且然后耦接到固定机构2704,例如通过熔焊、钎焊等。固定臂2703配置为在不受约束时从固定结构2702径向向外张开。固定臂2703包括弯曲形状,以使得当固定臂2703例如受导管2706约束时,固定机构2704从固定结构2702径向向内或在固定结构2702的外表面下方。
图27C至27F示出了在与组织2708接合后被缩回的图27A的固定系统2700。在图27C所示状态之前,系统被推进到固定部位。系统2700从导管2706被推进出,例如从导管2706的侧部推进出或端部推进出。当不受导管2706约束时,固定结构2702可以径向向外张开。当不受导管2706约束时,固定臂2703可以从固定结构2702径向向外张开并且接合组织2708。例如,固定臂2703可以在固定臂2703接触固定结构2702的点处枢转或旋转。在图27D至27F中,推进通过固定臂2703的导管2706使得固定臂2703径向向内曲折,直到如图27F所示,固定机构2704从固定结构2702径向向内或在固定结构2702的外表面下方。在图27D中,在和与组织2708的初始相互作用相同的方向上从组织2708拉出固定结构2704,这可以对组织2708来说是轻柔的(例如,减少或防止内皮损伤,例如剐破、撕裂、擦伤等)。
图27G是固定系统2750的又另一示例的正视图。固定系统2750类似于固定系统2700,包括固定结构2752、固定机构2754和固定臂2753,但是固定臂2753不被配置为相对于固定结构2752移动。图27G还示出具有配置为与固定机构2754的基部的形状对应的端部形状的固定臂2753(例如,对于圆锥形固定机构2754来说是环形的)。图27H是图27G的固定系统2750的侧视图。固定臂2753与固定结构2752的外表面径向向内间隔第一空腔2755。固定臂2753与固定结构2752的内表面径向向外间隔第二空腔2757。当固定系统2750压在组织上时,一些组织可以进入空腔2755并且与固定机构2754相互作用。第二空腔2757可以允许固定臂2753径向向内屈曲或曲折。当固定系统2750被撬离组织时(例如通过将固定结构2752缩回到导管中),组织可以退出空腔2755并且停止与组织相互作用。
图27I是固定系统2760的再另一示例的侧视图。固定系统2760类似于固定系统2750,包括固定结构2762、固定机构2764和固定臂2763,但是固定臂2763不被配置为进行曲折。固定臂2763与固定结构2762的外表面径向向内间隔第一空腔2755,但是不与固定结构2752的内表面径向向外间隔第二空腔。当固定系统2760压在组织上时,一些组织可以进入空腔2765并且与固定机构2764相互作用。没有第二空腔可以允许固定臂保持实心,这可以增加组织接合的可能性。当固定系统2760被撬离组织时(例如通过将固定结构2762缩回到导管中),组织可以退出空腔2765并且停止与组织相互作用。
图28A是固定系统2800的示例的侧视图。固定系统2800包括固定结构2802、远端固定机构2804a和近端固定机构2804b。远端固定机构2804a从固定结构2802的远端(例如,由固定结构2802的支柱形成的单元的远端)远端地延伸。远端固定机构2804a在扩张位置中径向向外张开。在缩回固定结构2802(例如,缩回到导管中)时,远端固定机构2804a从近端到远端径向向内曲折。近端固定机构2804b从固定结构2802的中间部分(例如,由固定结构2802的支柱形成的单元的近端)近端地延伸。近端固定机构2804b在扩张位置中径向向外张开。在缩回固定结构2802(例如,缩回到导管中)时,近端固定机构2804a径向向内曲折,如本文进一步详细地描述。图28B是图24A中的圆圈的扩大视图,其更好地示出了近端固定机构2804b的径向向外曲折(例如,对于固定系统2800的其他轮廓来说)。固定机构2804被形状设置为伸出固定结构2802的壁之外。
图28C是图28A的固定系统2800的局部正视图。近端固定机构2804b在附接点2812处耦接到固定结构2802。近端固定机构2804b可以与固定结构2802成一体或整体(例如,从相同海波管切割,例如如关于图28F所述)。接近附接点2812的股线是包括扭转或屈曲2810的系链2808。当切割海波管以形成附接点2812、近端固定机构2804b、系链2808、单元支柱等时,附接点2812自然地变得径向偏移(例如,由于大质量自然地想要保持直的)以使得近端固定机构2804b稍微从单元支柱和系链2808径向向内。类似的现象出现在单元之间的连接支柱2817(图28A)处。切割的海波管可以是这样的形状设置,包括但不限于:从近端到远端径向向外张开固定结构2802,从固定结构2802径向向外张开固定机构2804a,2804b(例如,使得固定机构2804a,2804b与固定结构2802相比挺立)以及使系链2808扭转。
图28D示出耦接到近端固定机构2804b的不透射线标记2814的示例。不透射线标记2814可以包括带、可识别形状(例如,矩形、圆形等)。在一些示例中,不透射线构件2814从近端固定机构2804b向外突出。在一些示例中,不透射线构件2814与近端固定机构2804b齐平。固定系统2800的其他部分可以包括不透射线标记(例如,其他近端固定机构2804b、远端固定结构2804a、固定结构2802、系链2810等)。
图28E示出近端固定机构2804b中的洞或开口或孔2816的示例。在一些示例中,洞2816可以用于例如通过压接、熔焊等附接其他部件(例如,不透射线标记、固定元件,例如圆锥形构件、倒钩、固定臂等)。附接某些结构可以提供对某些性能(例如,形状设置)的更好控制。在一些示例中,洞2816可以帮助捕获组织,例如与组织贴近的洞2816的边缘穿透洞2816。
图28F是海波管切割图案2820的示例的展开视图。切割图案2820包括系链2808、附接点2812、包括洞2816的近端固定机构2804b、固定结构2802和远端固定机构2804a。切割图案还示出倾斜或减缩区域2822。渐缩区域2822可以在缩回期间接合导管的远端,并且可以帮助转动近端固定机构2804b。在一些示例中,可以切割片材并且将片材卷成管(例如,初始形状设置为圆柱体并且然后形状设置或直接形状设置)。切割海波管可以例如形状设置成如图28A所示的形状。
图28G是图28F中的虚线方框28G的扩大视图。除了本文描述的形状设置的其他方式之外,邻近近端固定机构2804b的支柱可以以一定角度屈曲。图28H是图28G的支柱2824的侧视图。近端固定机构2804b的近端2826和近端固定机构2804b的远端2828被示出为支柱2824之后的虚线。图28I是径向向外屈曲的近端固定机构2804b的侧视图。图28J是径向向外屈曲的近端固定机构2804b和在屈曲点2830屈曲的支柱2824的侧视图。再次参考图28H,示出了近端固定机构2804b的长度x。在一些示例中,屈曲点2830约为x的50%±20%(例如,从近端2826或远端2826测量,约x的20%,约x的30%,约x的40%,约x的50%,约x的60%,约x的70%,这样的值之间的范围等)。屈曲点2830越近端,近端固定机构2804b径向向外突出越多。屈曲点2830越远端,近端固定机构2804b径向向外突出越少。支柱2824在屈曲点2830近端的部分相对于支柱2824在屈曲点2830远端的部分的角度在约20°至约50°之间(例如,约20°,约30°,约40°,约50°,这样的值之间的范围等)。在一些示例中,在不受约束状态下近端固定机构2804b的远端和支柱2824在屈曲点(或者,在图28I中为未屈曲支柱2824)远端的部分之间的距离y在约0.02英寸和约0.06英寸之间(例如,约0.02英寸,约0.03英寸,约0.04英寸,约0.05英寸,约0.06英寸,这样的值之间的范围等),但是例如血管直径、长度x等的因素可以影响距离y。
图28K是在屈曲点2830屈曲的支柱2824的侧视图。与图28J相比,近端固定机构2804b不被屈曲,但是其他参数(例如,屈曲角、屈曲点2830的位置、距离y等)可以保持相同。
图28L至28O示出在取回到导管2806期间向内旋转的近端固定机构2804b。在图28L中,固定系统2800被完全部署。近端固定机构2804b挺立。远端固定机构2804a也挺立,提供双向固定。在图28M中,固定系统2800正开始被撤回到导管2806中。近端固定机构2804b仍然挺立。在图28N中,固定系统2800进一步被撤回到导管2806中。当导管2806的远端与渐缩部分2822相互作用时,近端固定机构2804b仍然向内旋转。在图28O中,固定系统2800进一步被撤回到导管2806中。近端固定机构2804b除了远端位于导管2806中。在缩回期间不发生剐破、擦伤等。固定系统2800的进一步缩回会将固定结构2802和远端固定机构2804a放置在导管2806中。
使近端固定机构2804b指向远端可以允许在取回固定系统2800期间改善性能(例如,降低近端固定机构2804b或固定系统2800的任何其他部分被导管2806的远端剐破的概率)。由于近端固定机构2804b在取回时径向向内关节连接,所以近端固定机构2804b在部署或取回期间可以几乎不用顾虑擦伤和/或接合导管2806的内表面。可以通过例如屈曲点2830、附接点2812和/或近端固定机构2804b的屈曲的位置来控制取回期间近端固定机构2804b向内曲折的程度。所述远端可以包括远端固定机构2804a,这可以提供对于远端移动的阻力。
在一些示例中,本文描述的固定机构可以采取纹理化表面的形式。例如,可以将材料添加到固定臂或固定结构和/或从其去除材料以形成点画、条纹、粗糙等表面。纹理可以增加表面区域,这可以增加被接合的组织量。
图29A示出了导管系统2900的示例。导管系统2900包括护套2906、从护套2906的远端延伸的第一环2902和从护套2906的远端延伸的第二环2904。第一环2902和第二环2904中的至少一个包括多个电极2908。在一些示例中,导管系统2900包括固定特征2910(例如,包括无创伤硬环)。
图29B至29F示出了部署图29A的导管系统2900的示例性方法。在图29B中,护套2906已经被推进经过肺动脉瓣2928进入肺动脉干2922。肺动脉瓣2928是三尖瓣。在一些示例中,护套2906可以具有配置为与肺动脉瓣2928的三尖相互作用的形状。护套2906可以包括接近远端的压力传感器以帮助用户确定护套2906的远端何时在肺动脉瓣2928的远端。图29A还示出右肺动脉2924、左肺动脉2926、右肺动脉2924和左肺动脉2926之间的分叉2925以及目标神经2920(例如,右星状CPN)。
在图29C中,从护套2906的远端部署环2902,2904。在一些示例中,大致同时地部署环2902,2904,这可以降低递送复杂度,例如使用具有短递送抛投的单个致动机构。在一些示例中,环2902,2904可以顺序地、串行地部署或与首先被部署的任一环交错,这可以减小导管系统2900的轮廓。环2902,2904可以在任何旋转取向。
在图29D中,护套2906在环2902,2904被部署的情况下朝向分叉2925推进。不管环2902,2904的初始旋转取向如何,环2902,2904自定向到右肺动脉2904和左肺动脉2906中。例如,导管系统2900可以响应于环2902,2904与解剖学结构相互作用而在远端推进期间旋转。
在图29E中,护套2906进一步远端地朝向分叉2925推进。环2902,2904可以分别进一步推进到右肺动脉2924和左肺动脉2926,但是推进被分叉2925限制。在图29F中,固定特征2910可以可选地从护套2906部署,例如接近肺动脉瓣2928。固定特征2910可以远端地朝向分叉2925偏置护套2906,这可以限制远端推进。在一些示例中,固定特征2910包括例如镍钛诺的形状记忆材料。血液流动沿远端方向上,这可以帮助保持环2906的位置。在一些示例中,护套2906可以包括用于与血流相互作用的特征(例如,鳍片、球囊等)。
第一环2902的电极2908和第二环2904的电极2908可以根据用于确定哪个环2902,2904可以调节目标神经2910的预定或逻辑序列来激活。所选择环的电极2908可以用于神经调节而其他环的电极2908可以被停用。
在一些示例中,仅第一环2902包括电极2908。第二环2904可以仍然提供自定向和与分叉2925的相互作用。第一环2902的电极2908可以根据用于确定第一环2902是否可以调节目标神经2910的预定或逻辑序列来激活。如果第一环2902被确定为不能调节目标神经2910,则可以重新定位(例如,包括例如旋转180°)导管系统2900,以使得第一环2902位于右肺动脉2924和左肺动脉2926中的另一个中。
在一些示例中,不是环2902,2904,导管系统包括具有抽头端的两个指状物。抽头端可以提供与环2902,2904相同的益处,例如分叉相互作用,并且减少潜在问题,例如戳捅脉管系统、屈曲等。
在一些示例中,环2902,2904均不包括电极2938。在某些这样的示例中,电极2938可以设置在护套2906上。图29G示出了导管系统2930的示例。导管系统2930包括护套2906、从护套2906的远端延伸的第一环2902和从护套2906的远端延伸的第二环2904。护套2906包括多个电极2938。在一些示例中,导管系统2930包括固定特征2910(例如,包括无创伤硬环)。环2902,2904可以抑制或防止远端迁移和/或固定特征2910可以抑制或防止近端迁移。导管系统2930可以如关于导管系统2900所描述的那样定位,例如,在肺动脉瓣远端传送,部署环2902,2904,并朝向分叉推进,在分叉处一个环2902延伸到一个分支血管中,另一个环2904延伸到另一个分支血管中。
电极2938可以是环形的、部分环形的、点等。在一些示例中,例如其中电极2938位于护套2906的一侧上,可以根据预定或逻辑顺序激活电极2938以确定是否捕获目标神经。如果没有捕获目标神经,则可以重新定位导管系统2930(例如,包括旋转,例如180°),使得第一环2902位于右肺动脉2924和左肺动脉2926中的另一个中。在其中环2902,2904中的一个或两个包括电极2908的一些示例中,护套2908可包括电极2938。
在一些示例中,可以从导管2906部署与环2902,2904分开的电极。例如,本文描述的导管系统提供可以从导管的一侧和/或导管的一端部署的电极矩阵。在某些这样的示例中,环2902,2904可用于将导管2906定向和定位在目标部位,然后可在目标部位从导管2906部署电极矩阵。
在一些示例中,可以修改环2902,2904中的至少一个,而不是普通的环(plainloop),例如,如本文关于其他导管系统所描述的。在一些示例中,环2902,2904中的每一个可以被不同地修改。
图29H示出了导管系统2940的示例。导管系统2940包括护套2906、从护套2906的远端延伸的第一环2942和从护套2906的远端延伸的第二环2904。第一环2942包括第一丝线2943a和第二丝线2943b。丝线2943a,2943b中的每一个包括电极2948,从而形成电极矩阵。在护套2906的远端远侧,第一丝线2943a和第二丝线2943b间隔以形成间隙2943c,间隙2943c将丝线2943a上的电极2948与丝线2943b上的电极2948间隔。更多的丝线和电极也是可能的。例如,第三丝线可以在第一丝线2943a和第二丝线2943b之间延伸。电极2948被示为纽扣电极,但是其他类型的电极也是可能的(例如,管,在U形通道内等)。
在一些示例中,导管系统2940包括固定特征2910(例如,包括无创伤的硬环)。导管系统2940可以如关于导管系统2900所描述的那样定位,例如,在肺动脉瓣远端传输,部署环2942,2904,并朝向分叉推进,在分叉处一个环2942延伸到一个分支血管中,另一个环2904延伸到另一个分支血管中。
图29I示出了导管系统2950的示例。导管系统2950包括护套2906、从护套2906的远端延伸的第一环2952和从护套2906的远端延伸的第二环2904。第一环2952包括具有波动或锯齿形或正弦或波形的丝线。第一环2952包括在峰和谷处的电极2958,形成电极矩阵。电极2958也可以或替代地位于峰和谷之间。第一环2952可以包括附加丝线和/或电极。例如,可以是直的、正弦的或其他形状的第二丝线可以沿着第一丝线延伸。电极2958被示为纽扣电极,但是其他电极的类型也是可能的(例如,管,在U形通道内等)。在一些示例中,正弦形状可以在配置成横向地贴近血管壁的平面中。在某些这样的示例中,电极在正弦峰处,这可以提供增加或最佳的血管壁接触。在一些示例中,正弦形状可以增加刚度,这可以改善壁贴近,例如与直形状相比。
在一些示例中,导管系统2950包括固定特征2910(例如,包括无创伤硬环)。导管系统2950可以如关于导管系统2900所描述的那样定位,例如,在肺动脉瓣远端传送,部署环2952,2904,并朝向分叉推进,在分叉处一个环2952延伸到一个分支血管中,另一个环2904延伸到另一个分支血管中。
本文所述的几种过程针对以下提供:进入肺动脉干并且然后推进到右肺动脉和/或左肺动脉,或更一般地进入主或传入血管并推进到一个或多个传出或分支血管。在一些示例中,导管系统可以从分支血管进入并且朝向主血管和/或另一个分支血管推进。例如,导管系统可以插入右颈内静脉并朝向上腔静脉推进。另一个例子是,导管系统可以插入左颈内静脉并朝向左头臂静脉推进。
图29J示出了导管系统2960的另一示例。导管系统2960包括护套2906和环2962。环2962配置成从护套2906的远端延伸并近端地朝向护套屈曲回。在一些示例中,例如,如关于导管系统2900所描述的,环2962可包括电极。在一些示例中,导管系统2960包括固定特征2910(例如,包括无创伤硬环)。例如,如关于导管系统2930所描述的,护套2906包括电极2968。在一些示例中,导管系统2960包括护套电极2968和环2962上的电极。
图29K示出了导管系统2965的另一示例。导管系统2965类似于导管系统2960,除了环2963被配置为从护套2906的一侧延伸通过孔2907并且近端地屈曲之外。在一些示例中,孔2907可包括转动特征(turning feature),例如斜坡。
图29L-29N示出了部署图29K的导管系统2965的示例性方法。示例性方法还可以或替代地用于部署图29J的导管系统2960或其他导管系统。图29L-29N中所示的脉管系统包括左无名静脉或左头臂静脉2955,左锁骨下静脉2961和左颈内静脉2964,在本文中参考图2I进一步详细描述,但是其他方法也可适用于其它血管或其他内腔分叉。根据血管的相对大小等,可以调整导管系统以更好地与来自传入血管、传出血管的Y分叉、T分叉相互作用。在一些示例中,这样的导管系统可以有利地将导管确定地定位在解剖学连接部处。某些这样的解剖学连接部可能具有已知的通过神经,这可以允许用户在减少或最小化或没有可视化(例如,荧光检查)和/或引导(例如,使用导丝和/或引导导管)的情况下将电极定位在精确位置。在一些示例中,Y或T解剖学结构可以帮助确保导管和电极保持固定就位。
在图29L中,导管系统2965位于左颈内静脉2964中,其可以是导引器进入脉管系统的点。导管系统2965朝向左头臂静脉2955推进。至少在推进通过左锁骨下静脉2961和左颈内静脉2964的连接部期间,环2963从护套2906部署出。随着护套2906在左颈内静脉2964中推进,环2963沿着左颈内静脉2964的壁向内压缩滑动。
在图29M中,导管系统2965被推进足够远以使环2963不受约束并且能够向外扩张到设定形状。在图29N中,导管系统2965缩回直到环2963接触左锁骨下静脉2961。导管系统2965可以可重复地放置在左锁骨下静脉2961和左颈内静脉2964之间的连接部处。在一些示例中,放置可以在没有荧光检查的情况下进行,例如使用距离和/或触觉变化来确定导管系统2965被正确地定位。固定特征2910可以可选地从护套2906部署,例如接近左颈内静脉2964中的连接部。电极2968可以沿护套2906定位以捕获目标神经2921。目标神经2921可包括例如胸心分支神经。在一些示例中,目标神经2921是颈心神经。颈心神经可以还或替代地从左颈内静脉2964而成为目标。在一些示例中,导管系统2965包括可以帮助捕获目标神经的特征。例如,护套2906可以包括朝向位置2921屈曲的曲率,导管系统2965可以包括第二环,该第二环包括电极并且被配置为在与环2963相对的方向上从护套2906的远端或一侧部署出,和/或电极2968可以与孔2907纵向对齐第二环和/或在孔2907远端对齐。
图30A是电极系统3000的示例的透视图。系统3000包括导管3006,框架3002和多个电极3008。图30B是图30A的电极系统3000的一部分的俯视平面图。导管3006包括具有大致圆形横截面的近端部段3010和具有大致椭圆形横截面的远端部段3012。近端部段3010的圆形形状可有用于例如耦接到圆形近端部件,例如,鲁尔接口配件、其他圆形导管等。远端部段3012的椭圆形状可有用于例如优先在目标区域附近对齐,这可以减少或最小化从护套3006到目标区域的距离。远端部段3012的椭圆形状可有用于例如抵抗扭矩和旋转。框架3002可包括例如形成锯齿形或波动或正弦图案或蜿蜒以产生波浪框架或折叠形状的两个形状记忆(例如,镍钛诺)丝线。框架3002可以是基本上水平的或平面的,或者可以包括弯曲,例如以偏置或顺应血管壁。将电极3008耦接到调节系统的引线或导线可以沿框架3002延伸和/或延伸通过框架3002。
电极3008包括耦接到框架3002的纽扣。在一些示例中,电极3008的直径在约1mm和约3mm之间(例如,约1mm,约1.5mm,约2mm,约2.5mm,约3mm,这样的值之间的范围等)。如图30B中的虚线所示,电极3008纵向偏移,以在部署之前和/或缩回时顺序地嵌套在导管3006中,这可以减小导管的轮廓。在一些示例中,至少一些电极3008可以是并排的。在一些示例中,电极3008的一侧是绝缘的,这可以提供定向电极3008。电极3008可以耦接到框架3002以抑制电极3008的旋转,例如保持电极3008的表面大致是水平的或平面的。与组织(例如血管壁)的相互作用可以在诱导电极3008旋转之前诱导框架3002屈曲。
图30C是电极系统3020的另一示例的透视图。类似于系统3000,系统3020包括导管3006,框架3002和多个电极3028。图30D是图30C的电极系统3020处于塌缩状态下的远端视图。图30E是图30C的电极系统3020处于扩张状态下的远端视图。图30C和30E所示的扩张状态部分地扩张,因为一些电极3028仍然在导管3006中。如用户所确定的,可以部署选定数量的电极3028(例如,基于受试者的解剖学结构、指示等)。
电极3028包括耦接到框架3002的管形。框架3002可以包括纵向部段而不是峰以容纳电极3008的长度,并且框架3002中的屈曲可以保持电极3028的纵向定位。在一些示例中,电极3028的直径在约0.01英寸至约0.1英寸之间(例如,约0.01英寸,约0.02英寸,约0.03英寸,约0.04英寸,约0.05英寸,约0.06英寸,约0.08英寸,约0.1英寸,这样的值之间的范围等)。在一些示例中,电极3028的长度在约0.02英寸至约0.2英寸之间(例如,约0.02英寸,约0.03英寸,约0.04英寸,约0.05英寸,约0.06英寸,约0.07英寸,约0.08英寸,约0.09英寸,约0.1英寸,约0.12英寸,约0.15英寸,0.2英寸,这样的值之间的范围等)。边缘电极3028侧向并排,这可以提供某些电极组合图案(例如,如关于图32A-32D所讨论的那样)。在一些示例中,中心电极3028可以是阴极,并且四个最接近的侧向电极3028可以是阳极。在一些示例中,电极3028可以侧向偏移(例如,类似于电极3008)。在一些示例中,电极3028的周向弧是绝缘的,这可以提供定向电极3028。电极3028可以耦接到框架3002以抑制电极3028的旋转,例如保持电极3028的非绝缘表面面向某个方向。其他形状的电极3028也是可能的(例如,圆柱形,球形)。
系统3020包括可选的核心元件3024。核心元件可以例如帮助承载导线和/或保持框架3002的形状。在一些示例中,核心元件3024包括圆管(例如,海波管)。在一些示例中,芯元件3024是扁平的或带状的,矩形的,椭圆形的或其他形状。在一些示例中,芯元件3024从框架3002的中心侧向偏移。
图30F是电极系统3030的又一个示例的平面图。类似于系统3000,系统3030包括框架3002和多个电极3038。系统3030包括片材或膜或网格3032。与系统3000、3020不同,系统3030的电极3038位于包括柔性材料(例如,聚酰亚胺,硅树脂)的片材3032上。片材3032可包括例如包括图案化导线的柔性电路。片材3032可以包括例如如关于图4C所描述的网格。保持电极3038的片材3032可以提供对电极3038的相对位置和间距的控制。
系统3030可选地包括核心元件3034。框架3032可以耦接到核心元件3034,例如作为单独的V形部段。片材3032耦接到框架3002,并且可选地耦接到核心元件3034。在一些示例中,框架3002和片材3034在塌缩状态下卷绕核心元件3034。系统3030可以在没有导管的情况下以塌缩状态传送(例如,通过导丝或系链跟踪核心元件3034),例如,如果片材3032至少部分地使框架3002热绝缘,使得热形状记忆生效缓慢的话。图30G是图30F的电极系统3030的远端视图。在部署状态下,最好如图30G所示,片材3032具有弯曲形状,这可以帮助将电极3038保持抵靠在血管壁上。
图31A和31B示出了3×3矩阵中的九个电极的示例电极组合。可以使用其他数量的电极和矩阵图案,并且仅出于讨论的目的示出3×3矩阵。在电源在受试者外的示例中,能量预算可能不如准确的组织神经瞄准受关注。可以测试其中第一电极是阴极而第二电极是阳极的一系列组合以观察哪些组合提供了特定效果(例如,影响收缩性和/松弛性和/或不影响心率)。受试者可以在该过程期间提供关于疼痛,咳嗽,一般不适,麻刺感和/或其他感觉的输入,以给予系统关于哪些电极组合引起这些效果的反馈。可以测量收缩性和/松弛性响应,例如通过压力传感器、加速度计或其他收缩性和/松弛性测量,包括回波超声等外部工具。
图31A示出了其中一个电极是阳极并且一个电极是阴极的十二种组合的示例序列。每个组合可以操作,例如,4ms,然后基本上立即跟随序列中的下一个组合。如果初始运行成功,则例如大约50ms(20Hz)之后,可以重复序列。在运行测试1-12的序列之后,可以识别具有高于或低于特定阈值的效果的电极组合以在校准刺激和/或治疗刺激中使用和/或不使用。这可以使神经位置的映射自动化并且增加或优化针对功效和耐受性的刺激响应。图32A显示这些相同电极的其他组合也是可能的,例如,电极在中间、对角线上等。可以使用相同的序列或更短的序列(例如,包括测试1,2,7和8)来在宏观层面上验证定位(例如,该矩阵位置中的某种电极组合提供刺激),例如,在初始定位时、重新定位时和/或周期性地,以检查矩阵迁移。
在一些示例中,可以在电极的双极组合之前使用单极模式以更快的找到神经,其中在单极模式中,矩阵中的一个电极成为阴极并且阳极体贴片(或反之亦然)在受试者的胸部、背部或手臂上,然后双极或防护双极或靶心(bullseye)(例如,如本文所讨论的)组合可用于更有选择性地捕获神经。
在一些示例中,多个序列可以是可用的(例如,具有至少一个不同的电参数或电极组合序列)。例如,如果第一序列导致超过阈值数量的不期望响应,则第二序列可以开始,等等。系统可以基于其他序列的结果返回到初始序列。
以下组合的序列也是可以的:其中多个电极是阴极的且一个电极是阴极的,其中一个电极是阳极的并且多个电极是阴极的,和其中多个电极是阳极的并且多个电极是阴极的。
电刺激可能在ECG上产生噪声。能够用于减少或最小化刺激引起的噪声的一些参数包括刺激向量、振幅、脉冲宽度和/或频率。图31Ci至31Cxi示出了设置刺激向量的示例方法。在图31Ci之前,已将电极3102建立为在用作阴极时例如使用本文所述的系统和/或技术能够捕获神经。通过在阴极3102和用作阳极的电极之间的线能够设置刺激向量。在一些示例中,测试阴极3102周围的电极以找到与主ECG向量正交的刺激向量,该主ECG向量是两个ECG导联之间的物理向量。主ECG向量能够是正在医院监测器上显示的ECG向量和/或是正在由医院监测系统使用以检测ECG中的异常(诸如心律不齐或其他不期望变化)的ECG向量。在一些示例中,主ECG向量能够是由记录心脏电活动的另一装置(诸如可植入的心脏除纤颤器)正在监测的ECG向量。查找和设置与主ECG向量正交的刺激向量能够例如减少在ECG信号上看到的刺激噪声干扰的量。在不受任何特定理论束缚的情况下,认为刺激会产生在体内产生在ECG向量上记录的电压的电场,因此,如果刺激与ECG向量平行,则刺激场附加到由心脏电信号产生的场,并且在主ECG信号上产生可检测(例如可见)的噪声。
如果刺激向量与ECG向量正交,并且假定其中电导率在所有方向上均相同的各向同性均质介质,则没有电压施加在ECG向量上且没有影响,不会产生噪声,和/或不显示在ECG信号上。实际上,人体包括各种组织类型,并且不是各向同性或均质的。尽可能将刺激向量定位成与主ECG向量正交能够导致减少ECG上的噪声。如果对主ECG向量有先验了解,则能够减少测试以包括或仅包括与该主ECG向量近似正交的刺激向量。在一些示例中,可以使用试错过程来调整刺激向量以减小或最小化ECG上的噪声。
在图31Ci中,第一电极3104用作阳极。在图31Cii中,第二电极3106用作阳极。在图31Ciii中,第三电极3108用作阳极。在图31Civ中,第四电极3110用作阳极。在图31Cv中,第五电极3112用作阳极。在图31Cvi中,第六电极3114用作阳极。在图31Cvii中,第七电极3116用作阳极。在图31Cviii中,第八电极3118用作阳极。电极3104、3106、3108、3110、3112、3114、3116、3118提供围绕电极3102大致360°的八个不同的刺激向量。能够将更多或更少的电极用作阳极。使用更多的电极能够提供附加的刺激向量,附加的刺激向量能够提高精度并有助于减少ECG信号干扰。使用更少的电极可以提供更少的刺激向量,但是可以减少刺激建立持续时间,并且仍然可以足以识别降低噪声的刺激向量。图31Ci至31Cviii示出了围绕阴极3102行进(marching)的阳极。出于该示例的原因,其中电极3110为阳极的图31Civ的配置产生了刺激向量3120,该刺激向量3120产生了最小量的ECG信号干扰。该配置可以用于治疗刺激。在一些示例中,该配置可以用作确定用于治疗刺激的电极配置的多个因素之一。
在一些示例中,取决于电极阵列,可以执行附加的阳极测试。在图31Cix中,第九电极3122用作阳极。在图31Cx中,第十电极3124用作阳极。在图31Cxi中,第十一电极3126用作阳极。例如,图31Cix至31Cxi可以是原始阳极行进的一部分(例如,可以测试阵列中的所有电极)。在一些示例中,可以基于图31Ci至31Cviii中的测试结果来测试图31Cix至31Cxi,其发现刺激向量3120减少了ECG信号噪声。例如,如果通过使用电极3104作为阳极产生的刺激向量产生图31Ci至31Cviii中的最小ECG信号噪声,则可以省略图31Cix至31Cxi中所示的测试。为了该示例的目的,其中电极3124是阳极的图31Cx的配置产生了刺激向量3128,该刺激向量3128产生了最小量的ECG信号干扰,甚至小于刺激向量3120。可以使用该配置来用于治疗刺激。在一些示例中,该配置可以用作确定用于治疗刺激的电极配置的多个因素之一。在一些示例中,图31Cix至31Cxi可以是原始阳极行进的一部分(例如,可以测试阵列中的所有电极)。通常,刺激向量上的阳极和阴极之间的距离越小,由于场在有源刺激电极周围的限制较多,因而在ECG上产生的噪声越小。阳极相对于阴极较远的单极刺激能够在主ECG信号上引起最多的噪声,而阳极紧靠阴极的更紧密的双极配置可能会在ECG上产生较少的刺激噪声。
能够影响ECG噪声的其他刺激设置包括振幅、脉冲宽度和/或频率。当利用相对较低的刺激振幅和/或刺激脉冲宽度时,可以减少ECG上的刺激噪声。如果将治疗效果维持在期望水平,则减小刺激振幅和/或刺激脉冲宽度可以有助于减少ECG上的噪声。除了使用近似正交的ECG向量之外,使用减小的刺激振幅和/或脉冲宽度可以进一步减小或最小化ECG上的噪声。例如,如本文所述,与降低刺激振幅和/或刺激脉冲宽度和/或与正交ECG向量相结合,将刺激频率与ECG监测器的陷波滤波器频率相匹配能够进一步减少、最小化或消除ECG上的刺激噪声。
治疗功效可以是电极选择的主要考虑因素。阴极选择可以是治疗功效的主要驱动因素,使得选择阳极进行刺激向量化以减少ECG噪声和/或副作用可以是兼容的次要考虑因素。在一些示例中,还能够(例如,除了正交于ECG向量的刺激向量化之外)或替代地能够使用本文中描述的其他系统和方法来减小由于刺激而引起的ECG噪声。
在一些示例中,系统可以利用这样的方法:在该方法中,例如通过基于测试其他阳极的结果集中于特定阳极上,而以非行进顺序来测试不同的阳极。例如,如果发现通过使用电极3112作为阳极产生的刺激向量比通过使用电极3110作为阳极产生的刺激向量产生更大的干扰,则可以跳过图31vi至31viii的测试。然后,系统可以测试具有相似刺激向量的附加电极,诸如电极3122、3124,如图31Cix和31Cx所示(例如,省略图31Cxi的电极3126)。
在一些示例中,用户可以使用受试者中电极矩阵的图像的组合(例如,荧光检查图像),该图像的组合能够提供有关各种电极相对于解剖结构或相对于彼此的取向的一些信息,并且了解ECG的位置导致跳过某些阳极的测试。例如,可以跳过看起来与ECG向量基本上平行的阴极-阳极组合,和/或可以包括或测试看起来与ECG向量基本上垂直的阴极-阳极组合。用户可以理解某些图像类型的局限性(例如,为三维空间提供二维图像),并因此抑制测试的减少。
如果用于设置刺激参数和/或生成刺激输出的装置具有关于主ECG向量的反馈,则该装置能够使用该反馈来自动识别减少或最小化ECG上的噪声的刺激参数。例如,装置的导联可以附接到与用于生成主ECG向量的电极相同的电极上。可以调整刺激参数(包括刺激向量、振幅、脉冲宽度和/或频率),以减少或最小化ECG上的噪声,并增加或最大化信噪比。可以使用由用户设置的限值(诸如阴极选择或振幅上限和下限)来限制正在测试的参数集合(parameter set)。
图32A-32D示出了3×4矩阵中的12个电极的示例电极组合。3×4矩阵是示例,并且其他矩阵也是可能的(例如,但不限于,2×2,2×3,2×4,2×5,3×3,3×5,4×4,5×5,转置(例如,3×2是2×3的转置)等)。在一些示例中,矩阵可以是不规则形状的,例如,2×2然后是3×3。在图32C和32D中,中间列相对于左列和右列偏移。图32A-32D的电极组合可以是称为“防护双极”组合,因为阴极完全被阳极包围,或者至少不与非阳极阴极相邻。在图32A中,第2行第2列中的阴极电极被第1行、第3行和第2行以及第1和3列中的阳极电极包围。在图32B中,第4行第2列中的阴极电极被第3行和第4行、第1列和第3列中的阳极电极包围。在图32C中,第2列从上部开始的阴极电极被第1列从上部开始的头两个、第3列从上部开始的头两个和第2列从上部开始的第1和第3中的阳极电极包围。在图32C中,第3列从底部开始的第1阴极被第1列从底部开始的第1、第2列从底部开始的第1和第3列从底部开始的第2中的阳极电极包围。防护阴极(使用两个或更多个阳极)可以允许控制电场的扩散,这可以为目标神经提供更高效的刺激,和/或可以减少电场对非目标神经的溢出,该溢出可能导致意外的副作用。
在一些示例中,电极矩阵可用于电子地重新定位电极。例如,参考图32A,如果所有阳极和阴极向下移动一行,会使得第3行第2列中的阴极电极被第2行、第4行和第3行,第1列和第3列中的阳极电极包围。再次参见图31A,从测试3到测试9、从测试1到测试11等的变化可以被认为是电子重新定位。电极可以由此在多个方向上电子地被重新定位。在电子重新定位时,电极矩阵本身不移动或迁移。电子重新定位可用于对抗电极矩阵的意外移动或迁移。
在一些示例中,刺激包括有源双相波形,其中通过测量电荷在较长持续时间内通过迫使相反电荷的脉冲来主动地将曲线下的区域管理为零。在一些示例中,刺激包括通过允许电荷从组织消散而在曲线下的区域为零的无源双相波形。
在一些示例中,刺激包括介于约1mA和约20mA之间的振幅(例如,约1mA,约2mA,约3mA,约4mA,约5mA,约6mA,约7mA,约8mA,约9mA,约10mA,约15mA,约20mA,这样的值之间的范围等)。较低的振幅可以有利地具有较小的穿透深度,这可以抑制或避免刺激不作为目标的神经或其他组织。较高的振幅可以有利地更有可能具有治疗效果。在一些示例中,刺激包括在约0.5ms和约4ms之间的脉冲宽度(例如,约0.5ms,约0.75ms,约1ms,约1.25ms,约1.5ms,约1.75ms,约2ms,约2.25ms,约3ms,约4ms,这些值之间的范围等)。在一些示例中,可以根据强度-持续时间曲线结合脉冲宽度使用较低的幅度(例如,小于大约10mA),以提供所需的效果。较低的振幅可能是有利地具有较小的穿透深度,其可以抑制或避免刺激不作为目标的神经或其他组织。较高的振幅可以有利地更有可能具有治疗效果。在一些示例中,可以根据强度-持续时间曲线结合脉冲宽度使用较低的幅度(例如,小于大约10mA),以提供所需的效果。
在一些示例中,刺激包括介于约2Hz与约40Hz之间的频率(例如,约2Hz,约5Hz,约10Hz,约15Hz,约20Hz,约25Hz,约30Hz,约40Hz,在这些值之间的范围等)。低频率(例如,小于大约10Hz)可以有利地对疼痛受体具有可忽略的影响,所述疼痛受体通常响应更高的频率,使得受试者更能耐受治疗。
在一些示例中,刺激在刺激持续时间的开始和/或结束时倾斜。例如,如果刺激持续时间是10秒,则基于至少一个参数(例如,接通(ON)持续时间,振幅,脉冲宽度,频率等),初始刺激突发可以是约50%,然后在2秒的过程内增加或斜升至60%,70%等,直到达到100%。在100%的6秒后,刺激可以在2秒的过程内降低或斜降至95%,90%等,直至达到50%,之后可以关断刺激。斜升和/或斜降可以减少副作用,增加受试者耐受性,和/或避免因初始完全突发而可能发生的对系统的冲击。斜坡的持续时间可以基于刺激持续时间的百分比(例如,20%斜升,20%斜降),绝对持续时间(例如,无论刺激持续时间如何2秒斜坡)或其他因素。斜坡可以是线性的或采取某些其他函数(例如,减小斜升的梯级,增加斜降的梯级)。在使用斜升和斜降的示例中,斜升可以与斜降不同(例如,起始百分比可以不同于结束百分比,斜升持续时间可以与斜降持续时间不同,斜升函数可以与斜降持续时间不同,等等)。
图33A是收缩性对刺激的绘图。从基线收缩性开始,刺激接通时间1。刺激有一些时间延迟导致收缩性变化(例如,约10至20秒),然后收缩性稳定地上升直至达到相当稳定的状态。当收缩性在时间2中关断时,在收缩性开始衰减之前存在一些时间延迟。当刺激关断时的衰减延迟长于刺激接通时的延迟。衰减期间斜升到基线水平的时间也少于从基线开始的时间。衰减也可能随着时间的推移而减少。因此,刺激接通和关断与收缩性变化时的持续时间并不完全相关。
在一些示例中,刺激接通5秒,然后关断刺激10秒。在一些示例中,刺激接通2秒,然后关断刺激5秒。在一些示例中,刺激被接通10秒,然后关断刺激30秒。在一些示例中,刺激被接通直到达到基本上稳定的状态,然后关断刺激直到达到某种收缩性,此时刺激被接通直到再次达到基本稳定状态等。这种方法可以减少或最小化有效剂量。鉴于这一发现的占空比方法可以减少刺激接通的时间量,这可以减少能量使用,维持治疗效果和/或减少副作用,这可以增加患者的舒适度和耐受性。
在一些示例中,可以使用倾斜特征来缓慢地使刺激接通和关断的强度倾斜,或者快速关断刺激。倾斜特征可以允许患者适应刺激并减少突然转变。例如,至少一个参数(例如,接通持续时间,振幅,脉冲宽度,频率等)可以随时间推移缓慢增加和/或减小,直到建立到最终值。
在一些示例中,例如对于短期治疗,占空比可以包括交替接通5秒并且关断5秒持续1小时。在一些示例中,例如对于短期治疗,占空比可以包括交替接通5秒并且关断10秒持续1小时。在一些示例中,例如对于短期治疗,占空比可以包括交替接通10分钟和关断50分钟持续1小时。在一些示例中,例如对于长期治疗,占空比可以包括交替接通1小时和关断1小时持续1天。在一些示例中,例如对于长期治疗,占空比可以包括交替接通1小时和接通1小时持续1天。在一些示例中,例如对于长期治疗,占空比可以包括交替接通1小时和关断23小时持续1天。长期治疗中的接通持续时间可以包括短期治疗的循环。例如,如果交替接通1小时和关断1小时持续1天,则刺激接通1小时的持续时间可包括交替接通5秒并关断5秒持续该1小时。在一些示例中,多个不同的接通/关断循环可以在长期接通持续时间期间使用,例如10秒接通和10秒关断1分钟持续1分钟,然后1分钟接通和5分钟关断持续10分钟,然后10分钟接通和50分钟关断持续4小时,持续4小时和11分钟的长期接通持续时间。短期和/或长期接通/关断循环可至少部分地基于患者状态(例如,清醒或睡眠,躺下或直立,自初始刺激以来的时间等)。
图33B是使用基于阈值的方法和优化的占空比的收缩性对刺激的绘图。刺激接通和关断一段时间。如上所述,持续时间后收缩性的衰减减小,使得收缩性保持高于阈值持续特定持续时间。特定持续时间可以是已知的或确定的,例如通过感知收缩性。图33B中的虚线表示确定重新开始刺激周期另一持续时间的时间。该过程可以是在受试者被治疗的时间内重复,直到重新校准等。
图34是可用于实现占空比方法的示例性过程流程,例如,空比方法如关于图33A和33B所描述的方法。刺激被接通5秒,然后关断5秒,然后重复10分钟,然后关断刺激1小时。然后开始图34的过程流程。以心脏刺激关断开始,监测生理信号。存储基线趋势。检查当前信号与趋势偏离达内科医生设定的阈值(例如,小于或大于某一数量,百分比等)。如果当前信号没有偏离,则心脏刺激保持关断并继续监测生理信号并存储基线趋势直到当前偏离。在当前偏离趋势时,心脏刺激接通。患者监测器报告被发送给内科医生。以定期间隔,重新检查生理信号以查看趋势是否回到基线。如果趋势没有回到基线,则心脏刺激保持接通。如果趋势回到基线,则关断心脏刺激并且该过程全部重新开始。
在一些示例中,该系统包括以下中的一个或多个:用于调节的手段(例如,电极或其他类型的刺激导管或传送装置),用于固定的手段(例如,倒钩,尖头,锚固件,锥形结构或其他类型的固定机构),用于感测的手段(例如,与导管成一体的传感器,在单独的导管上的传感器,在受试者外部的传感器),以及用于校准的手段(例如,确定刺激参数的预定或逻辑序列)。
本发明的几个示例是特别有利的,因为它们包括一个、几个或所有以下益处:(i)增加收缩性和/或松弛性(例如,左心室),(ii)不影响心率或影响心率小于收缩性和/或松弛性,(iii)提供抗拒移动的锚固或固定系统,(iv)和/或(x)
图35A示意性地示出了可机械地重新定位的电极导管系统3500。系统3500包括近端部分手柄或毂3502。手柄3502包括机械重新定位系统3504,其包括轨道或通道或凹槽3510和可在凹槽3510内滑动的握把3512。系统3500还包括护套3506和电极系统3508。电极系统3508可以移入和移出护套3506。图35A示出电极系统3508已经从护套3506中扩张出。握把3512耦接到电极系统3508,使得握把3512的纵向和/或旋转移动导致电极系统3508的相应的纵向和/或旋转移动。护套3506可以单独地锚固在脉管系统中,例如如本文描述,使得只有电极系统3508在握把3512移动时移动。
在一些示例中,握把3512的纵向移动导致电极系统3508的相同或1:1的纵向移动。在一些示例中,齿轮或其他机械装置可用于使移动比率大于或小于1:1。可以使用滑轮和其他机械装置来反转握把3512的移动。图35A示出了护套3506中的棘爪凹槽(detent groove)3522,其可以与耦接到电极系统3508的棘爪和/或握把3512相互作用,例如如关于图35B所描述。在图35A中,握把3512已经从近端位置足够地纵向推进,使得电极系统3508部署出护套3506。
在一些示例中,可以刺激电极系统3508的电极以测试某些电极对的效果。如果电极对中没有一个具有效果,则可以使用重新定位系统3504移动电极系统3508并且重新运行测试。在一些示例中,最远端电极对可能具有最大效果,但不具有与可能预期一样大的效果。电极系统3508可以远端地推进以更好地测试原始部位远端的电极的影响。
图35B示出了在纵向推进之后的图35A的导管系统3500。与图35A相比,握把3512已经纵向推进了距离3514。握把3512的移动可以是手动的,电子的,机械的,其组合等。电极系统3508也已经纵向推进了距离3514。电极系统3508耦接到棘爪3520。例如,棘爪3520可以耦接到海波管,丝线等。当棘爪3520到达某个纵向位置时,棘爪3520可以延伸到护套3506中的棘爪凹槽3522中。延伸可以产生可听见的咔哒声或其他可识别的声音。在一些示例中,多个可听见的咔哒声(例如,1,2,3或更多)可以向用户通知电极系统3508被完全部署。在一些示例中,棘爪相互作用可以指示已经发生事件以提供确定性位置,例如,特定距离(例如,一厘米,一英寸等)的纵向推进,纵向推进足以完全部署电极系统3508,纵向推进到旋转移动轨道等。系统3500可包括多个棘爪3520和/或多个棘爪凹槽3522。在一些示例中,棘爪系统可以抑制电极系统3508的不期望的或意外的移动。
在一些示例中,握把3512的旋转移动或握把3512横向于纵向移动的移动可导致电极系统3508在相同的旋转或横向方向上的旋转移动。护套3506的扭转和转动可以导致不是1:1的移动比率。导管系统3500可以包括旋转硬止动件以限制电极系统3508的旋转移动,例如参考图35C和35D所描述。
图35C示出了在纵向推进和旋转之后的图35A的导管系统3500。图35D是沿图35C的线35D-35D截取的横截面视图。与图35A相比,握把3512已经纵向推进和旋转。电极系统3508也已经纵向推进和旋转。握把3512的旋转可以大于电极系统3508的旋转。在一些示例中,系统3500包括旋转硬止动件3524,例如在护套3506中。即使握把3512能够在轨道凹槽3510中进一步旋转,硬止动件3524也会抑制或阻止电极系统3508的进一步旋转。这样的系统可以提供可预测量的旋转重新定位。系统3500可以包括止动件3516(例如,包括物理屏障)或用于抑制或防止握把3512的意外或不希望的移动和/或电极系统3508的移动的其他装置。
图36A是导管系统3600的示例的透视图。系统3600包括被配置为保持在受试者体外的近端部分3602和被配置为插入受试者的脉管系统中的远端部分3604。远端部分3604包括可扩张结构3620。近端部分包括手柄3610和致动机构3612。近端部分3602通过导管轴3606耦接到远端部分3604。在一些示例中,系统3600包括导管轴3606和可扩张结构3620之间的应变消除装置3626。近端部分3602可包括包含多个端口的适配器,例如Y适配器包括第一Y适配器端口3616和第二Y适配器端口3618。第一Y适配器端口3616可以与内腔连通,该内腔配置成允许导丝3615插入通过系统3600。第二Y适配器端口3618可以包括电子连接器3619,其可用于将系统3600的电极矩阵耦接到刺激器系统。
图36B是处于塌缩状态的图36A的导管系统3600的一部分的透视图。所示部分包括导管轴3606的一部分、应变消除装置3626和可扩张结构3620。应变消除装置3626可以至少部分地在导管轴3606的内腔中。可扩张结构3620包括多个样条3622。样条3622中的四个包括电极阵列3624,电极阵列3624包括四个电极以形成4×4电极矩阵。电极矩阵中电极的数量、电极尺寸、电极间距等可以与本文所述的其他系统一致。例如,在一些示例中,可扩张结构3620包括包含电极的网格或膜,其伸展跨越两个或更多个样条3622。图示的部分还包括致动器丝线3628,致动器丝线3628可以耦接到致动器机构3612以引起可扩张结构3620的扩张或缩回。致动器丝线3628可以位于导管轴3606的内腔中。导丝3615也示出在致动器丝线3628的内腔中。在一些示例中,致动器丝线3628包括能够接收0.018英寸导丝3615的内腔。
图36C是处于扩张状态的图36A的导管系统3600的一部分的侧视图。致动机构3612的操作可以使可扩张结构3620膨胀和收缩。例如,旋转和/或纵向移动致动机构3612可以使致动器丝线3628近端地缩回,这可以将样条3622径向向外推动。在一些示例中,样条3622的远端耦接到远端毂,该远端毂耦接到致动器丝线3628,并且样条3622的近端耦接到近端毂,该近端毂耦接到导管轴3606。在扩张状态下,可扩张结构3620包括样条3622,样条3622在样条的径向向外位置处大体平行于纵向轴线彼此间隔。样条3622的平行取向可以提供样条3622的周向间隔,例如与单个样条或可能在周向上成束的丝线不同。在一些示例中,样条3622包括直径在约0.006英寸(约0.15mm)至约0.015英寸(约0.38mm)之间的丝线(例如,约0.006英寸(约0.15mm),约0.008英寸(约0.2mm),约0.01英寸(约0.25mm),约0.012英寸(约0.3mm),约0.015英寸(约0.38mm),在这样的值之间的范围等)。包括臂或样条之间的开口的框架可以帮助固定可扩张结构3620。例如,血管组织可以变形使得一些血管组织进入开口,这可以提供良好的固定。
在一些示例中,处于扩张状态的可扩张结构3620的直径3621在约15mm和约30mm之间(例如,约15mm,约20mm,约22mm,约24mm,约26mm,约28mm,约30mm,在这些值之间的范围等)。在一些示例中,样条3622可以是自扩张的,使得致动机构3612或另一机构(例如,护套在样条3622上的缩回)允许样条从压缩状态自扩张以引导到目标部位成为扩张状态以在目标部位进行治疗。在某些这样的示例中,处于扩张状态的可扩张结构3620的直径可以大小超过大多数受试者的预期脉管系统,以确保血管壁贴近。在一些示例中,样条3622可以是非自扩张的,使得样条仅在致动机构3612操作时扩张。在一些示例中,样条3622可以是自扩张的,并且致动机构3612可以进一步扩张样条3622,其可以提供可调整的可扩张结构3620的直径,可用于一系列的血管尺寸、壁贴近力等。在发生误差的情况下可扩张结构3620不与壁贴近的示例对于安全是有利的,例如如关于系统2200所描述的。在一些示例中,丝线不远端地固定(例如,到远端毂),这可以允许每个丝线独立地移动,这可以适应在部署部位的曲率。在扩张结构3620扩张时,可以选择性地激活电极矩阵中的电极以测试神经捕获、校准和/或治疗,例如如本文所述。
图36D示意性地示出了可扩张结构3620的示例的侧视图。可扩张结构3620包括从近端毂3607延伸到远端毂3608的八个样条3622。样条3622成对地分组,样条对大致彼此平行地延伸。样条3622的对可以是不同的线或相同的线(例如,在近端或远端处屈曲),例如如本文所述。样条3622侧向延伸并且仅从近端毂3607向外延伸,与纵向轴线3671成第一角度,或平行于纵向轴线3671,然后屈曲以在短长度之后形成第一角度。样条3622以该角度继续第一长度3675。在一些示例中,纵向轴线3671和第一长度3675之间的角度在约10°和约60°之间(例如,约10°,约20°,约30°,约40°,约50°,约60°,这样的值之间的范围,等等)。
在第一长度3675之后,每对平行样条的样条3622沿着第一长度3675以从与样条对齐的轴线以第二角度周向地发散,从具有纵向轴线3671的平面离开。第二角度可以是相同的或不同的。在短的长度之后,样条3622再次以相对于第一长度3675的轴线的第三角度屈曲,以使样条3622返回到彼此平行。第三角度可以相同或不同。在一些示例中,第二角度之间的差异和第三角度之间的差异是互补的。样条3622以与纵向轴线3671成第四角度平行第二长度3676,第四角度约为0°。在一些示例中,第一长度3675和第二长度3676之间的角度在约120°和约170°之间(例如,约120°,约130°,约140°,约150°,约160°,约170°,这样的值之间的范围等)。
在第二长度3676之后,样条3622以与纵轴3671平面出来的第五角度屈曲一小段距离直到样条3622汇聚。第五角度可以相同或不同。在一些示例中,第五角度中的一个或两个与第三角度中的一个或两个相同。在样条3622汇聚之后,样条3622以第七角度屈曲,使样条3622返回到彼此平行并且进入具有纵向轴线3671的平面第三长度,仍然与纵向轴线3671成第五角度。在一些示例中,纵向轴线3671与第三长度3677之间的角度在约10°和约60°之间(例如,约10°,约20°,约30°,约40°,约50°,约60°,这样的值之间的范围等)。在一些示例中,第三长度3677和第二长度3676之间的角度在大约120°和大约170°之间(例如,约120°,约130°,约140°,约150°,约160°,约170°,这些值之间的范围等)。第一长度3665可以与第三长度3667相同或不同。在第三长度3677之后,样条3622以第五角度屈曲到远端毂3608中或屈曲以平行于纵向轴线3671延伸到远端毂3608中。
本文所述的角度可以指在没有力的情况下可扩张结构3620的形状。由护套和/或致动器丝线3628施加的力可以增大或减小角度。例如,在护套中可扩张结构3620的约束可以减小第一长度3675和第三长度3677相对于纵向轴线3671的角度。对于另一个示例,远端毂3608相对于近端毂3607的纵向延伸(例如,通过远端地推进致动器丝线3628)可以减小第一长度3675和第三长度3677相对于纵向轴线3671的角度。对于又一个示例,远端毂3608相对于近端毂3607的纵向缩回(例如,通过近端地缩回致动器丝线3628)可以增加第一长度3675和第三长度3677相对于纵向轴线3671的角度。
由发散、平行、然后汇聚的成对样条3622所产生的区域可以是蜂窝。样条3622可以包括沿至少第二长度3672的电极。该图案可以使用任意数量的样条产生。其他屈曲图案也是可能的。例如,样条3622可以屈曲以在发散之前变得与纵向轴线3671平行和/或保持与纵向轴线3671平行,直到汇聚和/或可以以与第一长度3675和第二长度3677不平行的角度汇聚和/或发散。另一个例子,样条3622可以沿第一长度3675发散和/或沿第三长度3677汇聚。对于又一个例子,单根丝线可以来回屈曲以形成样条。另外一个例子是,屈曲可以比角度更平缓地弯曲。沿第二长度3676的样条3622与血管壁之间的细长接触可以抑制或防止可扩张结构3620的纵向轴线3671摆动。在一些示例中,可扩张结构3620包括用于样条3622的平行部分,其包括电极,但是不包括电极的样条3622,例如用于血管壁贴近的样条3622,可以包括平行丝线、非平行丝线、具有其他形状的丝线、具有不同直径的丝线、不同数量的丝线(例如,更多或更少)等。在某些这样的示例中,可扩张结构3620可以径向和/或周向不对称。
图36E示意性地示出了可扩张结构3630的另一示例的侧视图。可扩张结构3630的包括电极(例如,如图36C中所示)的样条3632的部分在扩张状态下从外径径向向内。凹入部分和外径的交叉可以形成锚固点3634,其可以帮助固定可扩张结构3630的位置。在一些示例中,可扩张结构3620可以采用可扩张结构3630的形状。
图36F示意性地示出了可扩张结构3640的又一个示例的侧视图。可扩张结构3640的包括电极(例如,如图36C中所示)的样条3642的部分在扩张状态下径向向外突出或者被凸出。在一些示例中,可扩张结构3640可以采用可扩张结构3620的形状,例如因为大致直的血管壁可以使样条3642的部分变直。凸出的可扩张结构3640可以抵消可以导致血管中的可扩张结构3630的形状的可扩张结构3620上的力,这可以增加贴近区域和/或减少纵向摆动。
图36G示意性地示出了可扩张结构3650的又一个示例的透视图。可扩张结构3620,3630,3640被示出为具有平行直到发散以形成平行部分的样条3622,3632,3642。可扩张结构3650包括扭转丝线3652而不是平行丝线,这可以使可扩张结构3650较硬,同时仍然提供一定量的移动,因为丝线能够沿着并且彼此绕着轻微滑动。较硬的可扩张结构3650可以有助于平行部分和电极矩阵的电极的周向间距。在一些示例中,可扩张结构3650或可扩张结构3620,3630,3640的丝线可以耦接(例如,使用耦接结构)、压接、钎焊、熔焊、粘附、其组合等,其也可以或替代地增加硬度。
图36H示意性地示出了可扩张结构图案的示例。图案还示出在可扩张结构3620,3630,3640中,并且包括具有近端起点和远端终点的平行部分,所述近端起点和远端终点大致沿周向对齐。周向对齐可以降低制造复杂性,例如因为可扩张结构3620是对称的,因此可以使用相同的工具和设置来成形每根丝线。周向对齐可以提供电极矩阵的灵活性,例如,如果每个样条包括相同的电极阵列以使得任何旋转位置是可以接受的话。
图36I示意性地示出了可扩张结构图案的另一示例。中间平行部分具有近端起始点和远端终点,其分别从顶部和底部平行部分的近端起点和远端终点远端地移位。错开起点和/或终点可以允许样条嵌套在塌缩状态,这可以减小系统直径。错开起点和/或终点可以减少在可扩张结构的扩张和/或塌缩期间电极可能被绊住的可能性。
图36J示意性地示出了可扩张结构图案的另一示例。中间平行部分具有分别从顶部和底部平行部分的近端起点和远端终点近端地移位的近端起点和远端地移位的远端终点。错开起点和/或终点可以允许样条嵌套在塌缩状态,这可以减小系统直径。错开起点和/或终点可以减少可扩张结构的扩张/塌缩期间电极可能被绊住的可能性。
图36K示意性地示出了可扩张结构图案的另一示例。丝线包括如可扩张结构3620,3630,3640中的平行部分,并且丝线的平行部分的近端和远端的部分不针对每组平行部分周向汇聚。不汇聚的丝线或者较少或部分汇聚的丝线(例如,在每组平行部分的一端)可以减小可能导致处于扩张状态下平行部分的不均匀间隔的力(例如,旋转或扭转力)。
图36L示意性地示出了可扩张结构图案的另一示例。平行部分包括在发散平行部分之间的第三非发散样条。在每个样条包括电极的示例中,第三样条可以增加在电极矩阵中的行数和/或在电极定位中提供更大的灵活性。更多或更少的丝线或样条也是可能的。丝线或样条中的一些或全部可以包括电极和/或可以耦接到包括电极的膜或网格。
图36M示意性地示出了可扩张结构图案的另一示例。与包括多个丝线相反,样条包括切割海波管的平坦表面。在一些示例中,多个电极位于一个或多个样条的外侧上。可以有多种切割图案。例如,包括电极的样条可以被成形为对应于电极形状和/或图案。在一些示例中,样条可以包括扁平丝线(例如,具有矩形横截面)。在一些示例中,样条可包括U形丝线(例如,如本文所述)。
图36N示意性地示出了可扩张结构的示例。可扩张结构包括耦接到样条的网格3660。网格3660可包括根据本文公开的电极矩阵。在一些示例中,网格3660的第一周向边缘可以耦接到第一样条,并且网格3660的第二周向边缘可以耦接到第二样条,使得网格的其余部分可以相对于其他样条滑动。
图36O示意性地示出了可扩张结构图案的示例。样条包括正弦或波状或波动或锯齿形状。波动丝线可以在电极定位中提供更大的灵活性。例如,电极可以放置在峰处、谷处和/或上升或下降部分处。由于更多的表面区域与血管壁接触,波动丝线可以提供比平行部分更好的壁贴近。
图36P示意性地示出了可扩张结构3660的示例的侧视图。图36Q是图36P的可扩张结构3660的近端视图。可扩张结构3660包括从近端毂3663延伸到远端毂3664的十个样条3662。样条3662成对地分组,其大致彼此平行地延伸。样条3662的对可以是不同的丝线或相同的丝线(例如,在近端或远端处屈曲),例如,如本文所述。这些样条3622可以各自具有不是周向对齐的近端起点和远端终点。样条3662从近端毂3663以对于纵向轴线3661的第一角度延伸,或者是直的然后在短的长度之后屈曲到第一角度。样条同时在周向方向上相对于周向原点以第二角度延伸。样条3662以这些角度继续第一长度3665。在第一长度3665之后,样条3662的一半,每对平行样条3662中的一个,沿周向方向以大于第二角度的第三角度屈曲,另一半样条3662,每对平行样条3662中的另一个以与第二角度相反的第四角度屈曲。这些屈曲使得样条对3662周向地发散。
在短的长度之后,样条3622再次以第五角度和第六角度屈曲,使得样条3662的对彼此平行,以相对于纵向轴线3661的第七角度3668,持续第二长度3666。第二长度3666可以与第一长度3665相同或不同(例如,大于)。第七角度3668可以与第一角度相同或不同。第七角度3668可以在约5°和约60°之间(例如,约5°,约10°,约15°,约20°,约25°,约30°,约35°,约40°,约45°,约50°,约55°,约60°,这样的值之间的范围等)。在第二长度3666之后,样条3662再次沿相反的周向方向屈曲,以与第七角度相反的八角度和第九角度屈曲,以相对于纵向轴线3661的第十角度周向汇聚在。由发散、平行、然后汇聚的成对的样条3662产生的区域可以是蜂窝。样条3662可以包括沿至少第二长度3666的电极。第十角可以与第一角相同或不同。在短的长度之后,样条3662再次屈曲,以第十一角度和第十二角度屈曲,使得样条对3662再次彼此平行,相对于纵向轴线3661成第十角度并且相对于周向原点成第十三角度持续第三长度3667。第三长度3667可以与第一长度3665相同或不同。第二长度3666可以与第二长度3666相同或不同(例如,小于)。在图36P所示的示例中,第一长度3665约与第三长度3667相同,第二长度3666大于第一长度3665和第三长度3667中的每一个。第十三角度可以与第七角度相同或不同。第十三角度可以与第二角度相同或不同。样条3662以相对于纵向轴线3661的第十角度并且以相对于周向原点的第十三角度延伸到远端毂3664中,或屈曲以笔直延伸到远端毂3664中。
每个样条3622的起始近端点和远端终点可以周向偏移,例如这取决于屈曲角度和长度。该图案可以使用任意数量的样条3662产生。与纵向轴线3661成一定角度的样条3662可以提供比平行于纵向轴线延伸的样条更好的壁贴近,例如由于增加的表面区域与血管壁的接触。尽管可扩张结构3660可以被认为是成角度的,可扩张结构3620的5对形式,例如,本文所述的任何可扩张结构可以适当地成角度。在一些示例中,样条3662可以被形状设置为成角度。在一些示例中,样条3662可以在使用期间成角度,例如通过相对于近端毂3663旋转远端毂3664。
本文所述的可扩张结构图案和其他可扩张结构图案的组合也是可能的。例如,可扩张结构可包括纵向偏移和三根丝线。另一个例子,可扩张结构可包括纵向偏移和波动丝线。在一些示例中,锚固件(例如,倒钩)可以与可扩张结构的样条集成。
图37A是导管系统3700的示例的透视图。导管系统3700可以与导管系统3600和/或本文所述的其他导管系统共享至少一些类似的特征。系统3700包括近端部分3702,其配置成保持在受试者体外,和远端部分3704,其配置成插入受试者的脉管系统中。远端部分3704包括可扩张结构3720。近端部分包括手柄3710。导管轴组件3706从手柄3710延伸到可扩张结构3720的远端。从致动管3728从手柄3710延伸通过导管轴组件3706到达可扩张结构3720的远端。近端3702还包括电插座3799,其可被配置为连接到神经刺激器(例如,射频发生器或其他适当的源,这取决于刺激或消融方式)的电插头。
图37B示意性地示出了可扩张结构3720的侧视图,图37C示出了可扩张结构3720的近端视图。可扩张结构3720包括从近端毂3740延伸到远端毂3750的多个样条3722。可扩张结构3720的一些样条3722可以包括被配置为刺激目标神经的电极3724。一些样条3722可以没有、不存在或不包括电极3724。在一些示例中,可扩张结构3720包括十个样条3722,其中,四个周向相邻的样条3722各自包括五个电极3724。样条3722可包括近端部段、中间部段和远端部段。中间部段可配置成当可扩张结构3720处于自扩张状态时径向向外延伸。样条3722的近端部段可以与中间部段形成第一角度,并且远端部段可以与中间部段形成第二角度。在一些示例中,近端部段和远端部段可以是直的,中间部段可以是凸的,径向向外屈曲。在一些示例中,近端部段和远端部段可以是直的,中间部段可以凹的,径向向内屈曲。在一些示例中,近端部段,中间部段和远端部段都可以是直的。包括电极3724的样条3722可以包括没有电极3724的近端部段和远端部段。样条3722可以进一步包括:近端过渡部段,连接近端部段和中间部段,以及远端过渡部段,连接中间部段和远端部段。
包括电极3724的样条3722可以被配置为在越过可扩张结构3720的纵向轴线的平面的一侧上向外延伸。不包括电极3724的样条3722可以被配置为在第二侧上向外延伸。例如,图37C中所示的不包括电极3724的样条3722可以在周向上较小地间隔开,以在可扩张结构3720的中心处位于越过纵向轴线的平面的同一侧上。包括电极3724的样条3722可以在一侧周向地占据小于180°。例如,包括电极3724的样条3722可以周向地占据约30°至约170°(例如,约30°,约45°,约60°,约90°,约100°,约110°,约120°,约150°,约170°,这些值之间的范围等)。在图37C中示出的包括电极3724的四个样条3722周向上占据约110°。
包括电极3724的其他数量的样条3722也是可能的。例如,所有样条3722或样条3722的子集(例如,1,2,3,4,5,6,7,8,9或者10个样条3722)可以包括电极3724。在包括多于10个样条的示例中,多于10个样条可以包括电极。所有样条3722或一定百分比的样条3722(例如,10%,20%,30%,40%,50%,60%,70%,80%,90%或100%的样条3722)可以包括电极3724。包括电极3724的样条3722可以是周向相邻或者在它们之间具有一个或多个非电极样条3722。
样条3722可包括一个电极3724和二十个电极3724之间(例如,1个电极,2个电极,3个电极,4个电极,5个电极,6个电极,7个电极,8个电极,9个电极,10个电极,15电极,20个电极,这些值之间的范围等)。更多电极3724可以提供更多的刺激选择和/或更有针对性的神经捕获。更少的电极3724可以减少电连接器的数量,这可以减少装置轮廓和/或减少电连接器占用高价值的装置体积。
图37D是弯曲以形成样条对3727的线的透视图。单个丝线可以在屈曲部3725处弯曲以形成样条对3727,其包括来自线的第一部分的第一样条3722A和来自线的第二部分的第二样条3722B。屈曲部3725可以定位在样条对3727的近端处,使得样条对3727的面向近端的端部是无创伤屈曲部,而不是可能的创伤性线端部。屈曲部3725可以定位在样条对3727的远端。样条对3727可以形成用两个或更多个单独的丝线形成,这些丝线以相同的配置定位,例如通过钎焊、熔焊等耦接。样条3722A,3722B每个可以包括不同的丝线。丝线可以耦接,例如在近端,或者不耦接。丝线的一端或两端可以弯曲成无创伤。样条对3727可以用两个大致平行的样条3722形成,其彼此在它们的近端和远端(例如,沿着近端和远端部段)并排延伸但是沿着中心部分(例如,中间部段)分开较大距离。如图37C中最佳所示,样条3722在开始时和样条3722的中心部分的末端(例如,沿着近端过渡部段和远端过渡部段)周向地发散,同时它们继续径向向外延伸。样条3722的汇聚和发散形成两个短的长度,在该长度期间样条对3727中的样条3722不平行。样条对3727中的样条3722在它们的中心部分内平行延伸以形成大致六边形形状。样条3722可以与本文公开的可扩张结构的任何图案或配置或其变型共享特征。在非限制性示例中,样条3722的中心部分可以基本上平行于可扩张结构3720的纵向轴线,如图36H所示,径向向内弯曲,例如如图36E所示,径向向外,例如如图36F所示,和/或具有其他配置。
可扩张结构3720的一些样条3722可以不包括或缺少或没有或不存在电极3724。在穿过近端毂3740插入没有电极3724的样条3722之后,样条3722可以用热缩管件3721包裹,例如沿着其平行且相邻的近端和远端部分。然后,热缩管件3721通过加热而收缩。热缩管件3721可以包括例如聚对苯二甲酸乙二醇酯(PET)或其他合适的材料。管3721件可以帮助抑制样条对3727的样条3722的包裹部分相对于彼此的旋转。如果可扩张结构3720在扩张状态下通过肺动脉瓣缩回,则沿着样条3722的近端部分热缩管件3721可以提供比样条3722更有利的面向近端的表面,用于与瓣膜组织相互作用。
形成样条3722的丝线可以由诸如镍钛诺的形状记忆合金形成。在这种情况下,丝线被加热并编程成所需的记忆形状,例如图37D所示的配置,然后快速冷却。然后根据需要变形丝线并通过样条内腔3745插入丝线并且丝线在加热到转变温度以上时返回到它们预定的记忆形状。一旦导线穿过两个相邻的样条内腔3745并返回到其编程的顺应性,在丝线中包括样条屈曲部3725,样条对3727可以远端地拉动,直到样条屈曲部在近端毂台阶3748后面的凹部3747内卡入就位(图37G)。
图37E是样条对3727的透视图。样条对3727包括越过每个样条3722A,3722B的中心部分定位的五个电极3724。单个样条对3727的两个样条3722A,3722B可各自包括电极3724,可以各自没有电极3724,或者样条3722A,3722B中的一个可以包括电极3724,而样条3722A,3722B中的另一个没有电极。
图37F是图37E的样条对3727的远端的扩大视图。包括电极3724的样条3722可以至少部分地被衬里3729覆盖,例如不在近端和/或远端。衬里3729可以包括PTFE。在电极3724的内表面未绝缘的示例中,衬里3729可以使样条3722与电极3724电绝缘,这可以抑制串扰,不期望电极的激活,由于电泄露的低效操作等。在电极3724的内表面是绝缘的或其他情况下的示例中,可以省略衬里3729。不包括电极3724的样条3722可以没有衬里3729,例如,为了提供不易滑动的更好的血管壁贴近。在将样条3722穿过近端毂3740插入(可以在衬里之前或之后)之后,具有衬里的样条丝线可以被样条管3723包裹,样条管3723在其近端和远端处连接样条对3727的两个样条3722A,3722B。样条管3723可包括用于每个样条3722的两个相邻但不同的内腔,或者它可在其近端和远端处包括单个(例如,长方形的)内腔用于接收两个样条。样条管3723可在近端和远端点处分开,此处样条3722A,3722B发散并且沿着其中心部分单独覆盖每个样条3722A,3722B,使得样条管3723具有两个Y端部。在样条对3727的中心部分处间隔开可以通过允许样条3722在圆周点处邻接壁来降低血栓形成的风险和/或提供更好的壁贴近。样条管3723可以跨越样条3722的中心部分之间的宽度,这可以提供更多种类的电极3724配置(例如,如关于图4C所描述的)和/或通过提供更多贴近表面区域来提供更好的壁贴近。可以使用多个样条管3723,例如,每个样条3722使用一个样条管3723。样条管3723可以可选地耦接,例如在样条对3727的近端和远端部分。样条管3723的尺寸可以设计成接触但不耦接。样条管3723可以抑制样条对3727的样条3722A,3722B相对于彼此的旋转。
单独电极3724可以是围绕样条3722的中心部分的圆周的大致圆柱形。电极3724的其他类型和配置也是可能的。例如,电极3724可以仅部分地围绕样条3722的圆周延伸,使得它们面向可扩张结构3720的外径(例如,如关于电极4403所描述的)。
可扩张结构3720可包括围绕可扩张结构的圆周间隔开的五个样条对3727。样条对3727可以均匀地沿周向间隔开(例如,如图37C所示)。一些样条对3727可以是周向地成簇。例如,包括电极3724的样条对3727可以在越过纵轴的平面的第一侧上,而没有电极3724的样条对可以在与第一侧相对的平面的第二侧上。两个周向相邻的样条对3727可以均包括一组电极3724,例如每个样条3722的五个电极3724,以形成二十个电极3724的4×5阵列。
图371Fi-37Fiii示出了电极的电移动的示例。可扩张结构3720或本文所述的其他可扩张构件在血管中扩张。可以选择性地激活电极,例如如本文所述,以确定刺进神经的组合。在图37Fi中,已经发现第一列中的两个电极在被激活时捕获目标神经。在一段治疗持续时间之后,目标神经的刺激可能不如在原始选择期间那样有效。一种选择是收缩、重新定位和重新扩张可扩张结构3720,然后重复选择性激活过程。另一种非互斥选择是电动移动可扩张结构3720以更好地捕获目标神经。在图37Fii中,第四列中的两个电极已经被发现在被激活时捕获目标神经。将来自第一列中的电极的刺激改变为第四列中的电极有效地使可扩张结构3720移动或纵向移动距离3701。在图37Fiii中,已经发现第一列中但在第二行和第三行中的两个电极在被激活时捕获目标神经。对这些电极的刺激改变有效地使可扩张结构3720周向旋转距离3703。有效纵向移动和周向旋转的组合也是可能的。尽管示出为双极操作,其中两个电极具有相反的电荷,但是单极操作(用相同电荷刺激一个或多个电极)结合不是电极阵列的电极的返回电极(例如,胸垫,导管系统3700的近端部分上,在单独的导管上等)也是可能的。虽然为了便于说明而示出为简单的双极操作,但是防护双极操作和其他技术也可以与电移动相容。可能影响电极阵列可以捕获目标神经的精度的因素可以包括电极3724的总数,电极阵列的跨度和形状,各个样条3722上的电极3724的比例,电极3724的跨越样条3722的长度的间隔,以及样条3722的周向间隔等。被配置为允许电动移动的电极阵列可以有利地减少或消除可扩张结构3720的物理或机械重新定位,这可以是包括收缩、移动和重新扩张可扩张结构3720。物理移动可引起不良事件,例如缺血性中风(例如,通过使碎片浮动或促使血栓形成),血管壁损坏(例如,促使狭窄)等。物理移动可能是耗时的,在此期间可能不治疗受试者。
再次参见图37B,可扩张结构3720包括近端毂3740和远端毂3750,样条3722从其延伸。近端毂3740可包括不锈钢或其他合适的材料。远端毂3750可包括不锈钢或其他合适的材料。近端毂3740和远端毂3750可包括相同材料或不同材料。
图37G是可扩张结构(例如,可扩张结构3720)的近端毂3740的示例的透视图。图37H示意性地示出了图37G的近端毂3740的侧剖视图。近端毂3740可包括生物相容性材料,例如不锈钢,镍钛合金,塑料等。近端毂3740可包括近端部分3741和远端部分3742。远端部分3742的直径大于近端部分3742,并且可以在其远端渐缩以形成部分圆形表面3749。中心内腔3743延伸通过近端部分3741和远端部分3742,提供从近端毂3740的近端到近端毂3740的远端的通道,致动管3728可以通过其滑动地延伸。尽管示出为具有圆形横截面,但是中心内腔3743可以具有其他横截面形状(例如,椭圆形,弧形,多边形等)。中心内腔3743可包括润滑涂层或衬里(例如,包括PTFE)。
近端部分3741可以从远端部分3742径向内侧。在一些示例中,近端部分3741和远端部分3742的直径或外部尺寸的差异可以近似为铰接件3726的厚度,如果外护套3711与远端部分3742重叠,则这可以允许近端毂3740耦接到铰接件3726,同时保持均匀的外护套3711(图37O)直径。在一些示例中,近端部分3741和远端部分3742的直径或外部尺寸的差异可以大约是铰接件3726的厚度加上外护套3711的厚度,如果外护套3711邻接远端部分3742,则这可以允许近端毂3740耦接到铰接件3726,同时保持均匀的直径。其他差异可适用于其他类型的导管轴,例如不包括铰接件3711。
多个外围内腔3744延伸通过近端部分3741和远端部分3742,提供从近端毂3740的近端到近端毂3740的远端的多个外围通道,电连接器可以通过所述多个外围通道延伸和/或流体可以流过。外围内腔内腔3744可以在中心内腔3743的径向外侧。外围内腔内腔3744可以具有比中心内腔3743小的直径。外围内腔内腔3744可以各自具有相同的直径或至少一个外周内腔3744可以具有不同的直径。尽管示出为具有圆形横截面,但外围内腔3744可以具有其他横截面形状(例如,椭圆形,弧形,多边形等)。外围内腔3744可以各自具有圆形横截面形状。具有相同的形状或至少一个外围内腔374可以具有不同的形状。例如,被配置用于使电连接器从其延伸通过的外围内腔3744可以具有一种直径或形状,并且配置成输送流体的外周内腔3744可以具有另一种直径或形状。虽然近端毂3740被示为具有五个外围内腔3744,但是其他数量的外围内腔3744也是可能的。例如,近端毂3740可包括每个样条对3727的至少一个外围内腔3744,每个样条3722的至少一个外围内腔3744,包括电极的每个样条3722的至少一个外围内腔3744,每个电极连接器的至少一个外围内腔3744等。虽然近端毂3740被示出为具有围绕近端毂3740的周向等距间隔的五个外围内腔3744,但是外围内腔3744的其他布置也是可能的。一些外围内腔3744可以周向成束或分组或成簇。例如,被配置为使电连接器从其延伸通过的外围内腔3744可以是周向成簇的,并且配置成输送流体的外围内腔3744可以围绕近端毂3740的其余部分基本上等距地周向间隔开。近端毂3740包括外围内腔3744,每个外周内腔3744具有相同的尺寸、形状和间距可以为各种设计提供制造灵活性和/或适应性。近端毂3740包括外围内腔3744,每个外周内腔3744具有相同的尺寸、形状和间距可以为一种类型的设计提供增强的性能。
近端毂3740的远端部分3742可包括样条内腔3745。一个或多个样条3722可定位在每个样条内腔3745中。在示例性制造方法中,丝线可屈曲,例如如图37D所示。丝线的自由端可以插入样条内腔3745的近端,然后远端地推进,直到屈曲部3725接触或接近近端毂3740的远端部分3742的近端。每个样条对3727屈曲部3725可以抑制或防止样条对3727远端地滑动,因为它接触近端毂3740的远端部分3742的近端。
近端部分3741可包括凹部3747,凹部3747配置成容纳或接收在近端毂3740的远端部分3742的近端附近延伸的样条3722的部分。样条3722的该部分可包括屈曲部3725。样条3722的该部分可以包括样条3722的自由端,其可以可选地屈曲,例如屈曲成无创伤形状。如果凹部3747是其他弧形近端部分3741的扁平部分,则凹部3747和径向向外表面之间的部段形成台阶。近端部分3740可以每个样条对3727包括一个凹部3747和一个台阶3748。近端部分3740可以每两个样条3722包括一个凹部3747和一个台阶3748,无论该两个样条3722是否成样条对3727。近端部分3740可以每个样条3722包括一个凹部3747和一个台阶3748。近端部分3740可以包括一个围绕或基本上围绕近端部分3740的圆周的弧形凹部3747。近端部分3740可包括用于包括电极3724样条3722的一个或多个弧形凹部3747和用于没有电极3724的样条3722的一个或多个凹部3747。
台阶3748可以限制样条3722的近端的近端移动。在包括屈曲部3725的示例中,如果样条3722从凹部3747中出来,则在缩回包括样条3722和近端毂3740的可扩张结构3720期间可能与血管壁相互作用的表面将是无创伤的,因此可能不易刺穿或以其他方式不利地影响血管。如果样条3722的远端是直丝线并且从远端毂3750出来,则在近端缩回期间可能与血管壁相互作用的表面将面向远端,该方向与缩回相反,因此可能不易刺穿或以其他方式不利地影响血管。如果可扩张结构3720的样条3722具有在径向向外屈曲的部分,则样条3722的近端和远端可以被偏置成从向外表面径向向内,因此可能不容易刺破或以其他方式对血管产生不利影响。
样条3722可以与样条内腔3745滑动地接合。在致动管3728的近端缩回时,台阶3748可以提供抵靠样条3722的近端的反作用力,迫使样条3722径向向外屈曲。例如,径向向外配置可以与由形状记忆提供的扩张配置不同。样条3722可以可固定地耦接到样条内腔3745。在某些这样的实现中,样条3722和样条内腔3745之间的相互作用,独立于凹部3747、台阶3748和/或近端毂3740的远端部分3742的近端,可以抑制样条3722相对于毂3740的近端和远端移动。在一些示例中,样条3722与样条内腔3745之间的摩擦可以提供额外的或替代的反作用力。样条对3727中的屈曲部3725形成无创伤近端,这在装置故障情形中对于脉管系统造成的危险较小,所述装置故障情形导致样条3722的近端自由或未对齐,使得它们无意中接触血管壁。样条对3727可以由单独的丝线或在其远端处包括屈曲部的丝线形成。在某些这样的示例中,样条3722可包括近端屈曲或环,样条3722可固定地耦接到样条内腔3745,和/或样条内腔3755可包括在其近端封闭的通道。近端毂3740的远端部分3742的远端可以是渐缩的,使得样条内腔3745的远端以与圆形表面3749成一定角度打开。样条内腔3745在其远端处的成角度的开口端可以允许样条3722更容易径向向外屈曲,这可以在采用扩张配置时减小丝线上的应力。
图37I是图37G的近端毂3740的远端的透视图。将电极3724连接到电插座3799的丝线或引线或导体3712可延伸通过近端毂3740的外围内腔3744。如图37I所示,导体3712可以在外围内腔3744之间分配,使得一个或多个样条3722的所有电极的导体3712延伸通过相同的外围内腔3744。例如,如果可扩张结构3720包括两个相邻的样条对3727,每个包括五个电极3724,连接到第一样条3722的电极3724的五个导体3712A可以延伸通过第一外围内腔3744A,连接到具有第一样条3722的样条对3727中的第二样条3722的电极3724的五个导体3712B可以延伸通过第二外围内腔3744B,连接到第三样条3722的电极3724的五个导体3712C可以延伸通过第二外围内腔3744B,并且连接到具有第三样条3722的样条对3727中的第四样条3722的电极3724的五个导体3712D可以延伸通过第三外围内腔3744C。第四外围内腔图347D和第五外围内腔3744E可以没有导体3712。外围内腔3744中的导体3712的其他分布也是可能的。对于另一个例子,所有导体3712可以延伸通过一个外围内腔3744。对于又一个例子,每个样条3722的所有导体3712可以延伸通过一个外围内腔3744,其对于每个样条3722是不同的。对于又一个示例,两个样条3722(例如,在样条对3727中)的所有导体3712可以延伸通过一个外周内腔3744。没有导体3712的外围内腔3744可以周向地位于导体3712延伸通过其中的两个外围内腔3744之间。流过外围内腔334的流体可以与占据外围内腔3744的导体3712的数量成反比,使得更多的流体在更少的导体3712的情况下流过外围内腔3744。在本文中进一步详细描述了流过装置3700的流体流动。
图37J示意性地示出了可扩张结构(例如,可扩张结构3720)的远端毂3750的示例的侧剖视图。远端毂3750可包括生物相容性材料,例如不锈钢、镍钛诺和塑料等。样条3722的远端延伸到远端毂3750中。远端毂3750可以是大致圆柱形的,并且可以包括无创伤(例如,圆形)远端3754和/或渐缩近端3756。渐缩端部3756可在通道3755的近端上形成成角度的开口面,其允许插入的样条3722更容易屈曲以实现扩张配置。远端毂3750可包括配置成接收致动器管的中心内腔3753。致动器管3728可以插入或穿过中心内腔3753并通过任何合适的方式可固定地耦接到远端内腔3753,例如通过粘合剂(例如,氰基丙烯酸酯)、熔焊、钎焊、其组合等。远端毂3750包括多个凹部3755,凹部3755配置成接收样条3722的远端。凹部3755可以具有与样条3722的远端相同的形状,例如细长和圆柱形。远端毂3750可包括多个凹部3755,每个凹部3755配置成接收一个样条3722的远端。在样条3722的远端插入凹部3755之后,通过焊接远端毂3750,样条3722可刚性地附接到远端毂3750。焊接可以包括在远端毂3750的外圆周周围(例如,360°左右)施加热源。焊接可以包括使用激光和/或其他合适的热源。样条3722可以是焊接到远端毂3750。在有或没有焊接样条的情况下,焊接远端毂3750的外圆周可以通过可变形地减小凹部3755的内径来热熔凹部3755中的样条3722。
致动管3728滑动地延伸通过近端毂3740的中心内腔3743,然后穿过可扩张结构3720的径向内部部分(例如,中心),然后可固定地耦接到远端的中心内腔3753。致动管3728的远端可以通过任何合适的方式耦接到远端毂3750,例如通过粘合剂(例如,氰基丙烯酸酯)、熔焊、钎焊、其组合等。当致动管3728近端地缩回时,致动管3728近端地拉动远端毂3750朝向近端毂3740,近端毂3740由导管轴组件3706保持就位。随着近端毂3740和远端毂3750更靠近在一起,可扩张结构3720上的压缩力迫使样条3722径向向外扩张,增加直径和/或减小可扩张结构3720的长度。可扩张结构的直径可大于可扩张结构3720的形状设置的扩张形状。当致动管3728。远端地推进时,致动管3728远端地推动远端毂3750远离近端毂3740,近端毂3740由导管轴组件3706保持就位。当近端毂3740和远端毂3750进一步分开,可扩张结构3720上的扩张力迫使样条3722径向向内缩回,减小直径和/或增加可扩张结构3720的长度。
图37K示出了图37A的导管系统3700的近端3702的示例的侧视图。近端3702包括手柄3710和从其延伸的导管轴组件3706的一部分。手柄3710被配置为保持在体外。手柄3710包括近端部分3761和可相对于近端部分3761移动的远端部分3762。远端部分3762可包括手柄基部3763和外手柄3770。外手柄3770可包括抓握部分(例如,包括纹理化表面),其可以增强摩擦以提供更好的用户抓握。近端部分3761可以包括致动器3780和止血阀3784。近端部分3761和远端部分3762可以通过致动管组件3790和包括锁定构件3776的固定构件3774可移动地连接。配置成向电极3724供应信号的电导体3712可以经由连接器管件3798进入手柄3710,连接器管件3798将手柄3710连接到电插座3799。外手柄3770可包括具有引导端口的突起3771,连接器管件3798可穿过该引导端口,使得连接器管件3798沿手柄3710的远端部分3762的一侧固定。手柄3710可以相对于导管轴组件3706的纵向轴线不对称,这可以帮助用户估算附接的导管轴组件3706中的扭转或旋转量。
图37L是图37K的近端3702的侧剖视图。外手柄3770包括从其远端远端地延伸的凹部,该远端配置成接收握把基部3763。手柄基部3763的近端部分可以部分地插入凹部中并且可固定地耦接到手柄基部3763。
外手柄3770包括第一内腔3772,第一内腔3772配置成可滑动地接收致动管组件3790的一部分。外手柄3770可包括第二内腔3773,第二内腔3773配置成接收固定构件3774,例如销,螺钉,活塞等。固定构件3774可包括例如内六角螺钉,其包括带螺纹的细长部分和帽3775。如果固定构件3774可固定地耦接到致动器3780,则内腔3773可以没有螺纹以便固定构件3774可纵向滑动通过内腔3773。带有螺纹的细长部分可以与锁定构件3776中的互补螺纹相互作用。如果锁定构件3776旋转地耦接到致动器3780,则内腔3773可以包括互补的螺纹,并且固定构件3774可以在旋转的同时纵向滑动通过内腔3773。外手柄3770可以包括延伸到第二内腔3773中的肩部,其配置成与固定构件377的扩大部分相互作用。例如,肩部可以抑制或防止帽3775的近端缩回,从而防止固定构件3774的近端缩回超过一定长度。限制固定构件3774的纵向平移,其中固定构件3774可固定地耦接到致动器3780,致动器3780可固定地耦接到致动管3728,可以限制可扩张构件3720的径向扩张。限制可扩张构件3720的径向扩张可以通过降低可扩张构件3720足够扩张成穿破或撕破血管的可能性来增强安全性。内腔3773的远端可被堵塞,例如以防止碎屑干扰固定构件3774的移动。帽3775可包括工具接口,例如六角形凹口,突出螺母等。可以在组装期间(例如,将固定构件3774耦接到致动器3780)和/或在手术期间使用工具接口。
致动器3780可包括与外手柄3770的第一内腔3772对齐的第一内腔3781。第一内腔3781可被配置为耦接到阀3784(例如,止血阀3784(例如,鲁尔锁)),例如通过包括互补螺纹,被配置成被攻丝,被配置成接收压配合等。致动器3780可包括与第一内腔3781连通的阀,第一内腔3781与致动器3780是整体的。致动管组件3790的一部分可固定地耦接到第一内腔3781和阀3784中的至少一个。致动管组件3790的内腔可以与阀3784的内腔流体连通。
致动器3780可包括第二内腔3782,第二内腔3782配置成将致动器3780可固定地耦接到固定构件3774。根据固定构件3774的形状和配置,第二内腔3782可与外手柄的第二内腔3773对齐。第二内腔3782可包括螺纹,该螺纹配置成接收并固定固定构件3774的细长螺纹部分。固定构件3774可与致动器3780的远端表面整体形成并从其延伸。
锁定构件3776可以可选地沿着固定构件3774定位在致动器3780和外手柄3770之间。锁定构件3776可以包括例如锁定槽(例如,如图36K所示),螺母,蝶形螺母等。锁定构件3776包括螺纹内腔,该螺纹内腔配置成与固定构件3774的细长螺纹部分相互作用。锁定构件3776可包括配置成增强用户抓握的纹理外表面。螺纹将锁定构件3776上的旋转力传递传递成沿着固定构件3774纵向移动。当锁定构件3776邻接外手柄3770的近端时,在可被认为是锁定位置的情况下,锁定构件3776抑制或阻止致动器3780(并因此可固定地耦接到其上的致动管组件3790)远端地移动。使致动器3780锁定可以抑制或防止可扩张结构3720的样条3722径向压缩并失去壁贴近。
锁定构件3776可包括用于防止或抑制固定构件3774相对于外手柄3770的纵向移动的任何合适的结构。在一些示例中,锁定构件3776可以是非螺纹结构。例如,锁定构件3776可包括夹具,该夹具通过压力和/或摩擦力固定到固定构件3774。锁定构件的夹具的夹持可由用户选择性地松开和/或抓紧。在一些示例中,夹具锁定构件3776可以通过例如弹簧被偏置在固定构件3774上的抓紧位置中。夹具锁定构件3776可以包括围绕固定构件3774的圆周的通道,并且通道的直径可以扩大或缩小,这通过以下来实现:通过转动连接夹具锁定构件3776的两端的螺钉来闭合围绕固定构件3774的圆周。夹具锁定构件3776可包括偏置的突起,其配置为与固定构件3774摩擦接合,并且可以由用户暂时释放。当处于松开位置时,夹具锁定构件3776可以沿着固定构件3774滑动或以其他方式可移动,并且当处于抓紧位置时不可滑动或不可以其他方式可移动。在一些示例中,夹具锁定构件3776可从固定构件3774移除并且沿着固定构件3774的长度选择性地重新附接在期望位置。当夹具锁定构件3776的表面邻接外手柄3770的近端时,夹具锁定构件3776可以抑制或防止固定构件3774相对于外手柄3770的远端位移,从而将手柄3710置于锁定位置。
图37Li-37Liii示出了操作手柄3710以使可扩张构件3720径向扩张的示例性方法。图37Li示出了处于压缩状态的手柄3710,其中致动器3780邻接或靠近锁定构件3776,其中锁定构件3776邻接或靠近外手柄370。如左图所示,可扩张构件3720可处于自扩张状态。致动管组件3790可在可扩张结构3720径向向外自扩张时向近端缩回。
如图37Lii所示,当致动器3780向近端缩回时,固定构件3774(其可固定地耦接到致动器3780)近端地滑动通过外手柄3770的第二内腔3773,锁定构件3776停留在固定构件3774上就位并且因此近端地缩回,致动器管组件3790近端地滑动通过导管轴组件3706、手柄基部3763的内腔3764和外手柄3770的第一内腔3772。当致动器管组件3790近端地缩回时,致动器管3728可固定地连接到其上的远端毂3750近端地缩回,在样条3722上施加纵向压缩和径向扩张力,该径扩张力比自扩张状态进一步径向扩张。当样条3722贴近血管壁时,用户通常可以感觉到致动器3780中的反作用力,这对于如图37Li-37Liii所示的手动过程是有益的。当感觉到壁贴近时,用户可以通过进一步近端地缩回致动器3780和/或通过远端地推进致动器3780来调整扩张。一旦用户对由可扩张构件3720的样条3722提供的壁贴近感到满意,用户就可以接合锁定构件3776。
如图37Liii所示,用户旋转锁定构件3776。固定构件3774的螺纹细长部分的螺纹和锁定构件3776将旋转力转换成纵向力,并且锁定构件3776沿着固定构件向远端推进直到锁定构件3776抵靠外手柄3770的近端表面为止。如果远端力施加到致动器3780,则致动器3780通常不能向远端移动,因为锁定构件3776压靠在近端表面上外手柄3770。
图37Li和37Liv示出了操作手柄3610以径向扩张可扩张构件3720的另一示例性方法。再次参见图37Li,手柄3710处于压缩状态。
如图37Liv所示,当锁定构件3776旋转时,固定构件3774的螺纹细长部分的螺纹和锁定构件3776将旋转力转换成纵向力。锁定构件3776抵靠近端外手柄3770的表面迫使固定构件3774向近端缩回。
当固定构件3774向近端缩回时,固定构件3774向近端滑动通过外手柄3770的第二内腔3773,致动器3780,其可固定地耦接到固定构件3774,向近端缩回,并且致动器管组件3790向近端滑动通过导管轴组件3706,手柄基部3763的内腔3764和外手柄3770的第一内腔3772。随着致动器管组件3790向近端缩回,远端毂3750向致动器移动管3728可固定地连接在一起,向近端缩回,在样条3722上施加纵向压缩和径向扩张力,该径向扩张力比自扩张状态进一步径向扩张。在锁定构件3776的整个旋转中,锁定构件3776抵靠近端外手柄3770的表面使得如果远端力施加到致动器3780,致动器3780通常将不能够远端地移动,因为锁定构件3776压靠在外手柄3770的近端表面上。
当锁定构件3776抵靠外手柄3770的近端表面时,用于旋转锁定构件3776的力可提供微调。取决于螺距,锁定构件的旋转可以向近端旋转一定的旋转量。使致动管组件3790缩回一定量和/或使可扩张构件3720径向膨胀一定量。例如,锁定构件3776的90°旋转可在不存在的情况下使可扩张构件径向膨胀直径1mm。更精细和更粗糙的间距也是可能的。更精细的间距允许更精细的调整。更粗糙的间距减少了用于纵向移动部件的旋转量,这可以减少程序时间。锁定构件3776可以包括围绕其周长的标记,以帮助用户识别旋转量。
图37Li-37Liv的方法的组合也是可能的。例如,用户可以首先手动缩回致动器3780,例如感觉到壁附着,旋转锁定构件3776以邻接外侧的近端。手柄3770,然后通过旋转锁定构件3776来微调膨胀量。例如,如果用户希望将可扩张构件3720扩张超过壁贴近2mm的直径(例如,血管的直径测量值在最大心脏收缩时),这可以提供牢固锚固,用户可以在抵靠外手柄3770之后将锁定构件3776旋转180°。
图37M是手柄基部3763的示例性部件的侧剖视图。为了提供示例上下文,图37M还包括致动轴组件3790的部分,导管轴组件3706的一部分和连接器管3798。手柄基部3763包括内腔3764,内腔3764配置成接收密封元件3766,致动管组件3790和/或导管轴组件3706。当手柄基部3763插入外手柄3770的凹槽中时,内腔37 3764与外手柄3770的第一内腔3772对齐。
通过将导管轴组件3706的近端插入内腔3764中然后将导管轴组件3706固定到手柄基部3763上,例如通过粘合剂(例如,氰基丙烯酸酯),导管轴组件3706可以固定地连接到手柄基部3763。手柄基部3763可包括延伸到内腔3764中的肩部3768,其配置成与导管轴组件3706的近端相互作用。例如,肩部3768可提供止动件。用于将导管轴组件3706插入内腔3764中,这可以便于制造。致动管组件3790可以包括多个部件,例如包括多种类型的管。更少的部件通常可以降低致动管组件的制造复杂性。多个部件可以提供致动管组件3790的不同部分的专门化。如果耦接部件一起比为特定功能修改更少的部件更容易,多个部件可以降低致动管组件3790的制造复杂性。图37M中所示的致动管组件3790包括第一海波管3791,第二海波管3792和致动管3728。致动管组件3790可包括致动管组件内腔3793,其从致动管组件3790的近端延伸到致动管组件3790的远端。致动管组件内腔3793可包括每个部件中的部段(例如,致动管组件3790的第一海波管3791,第二海波管3792和致动管3728可以沿着致动管组件3790的纵向轴线对齐。部件的内腔可以通过连接和/或对齐,例如,将具有较小外径的部件定位在具有较大直径内径的部件的内腔中致动管3728的表面和/或包括致动管组件内腔3793的任何其他部件可包括衬里(例如,含氟聚合物(例如,PTFE,PVDF,FEP,Viton等))以减少与的摩擦。通过内腔3793插入的导丝。致动管3728的外表面和/或包括致动管组件3790的任何其他部件可包括衬里(例如,含氟聚合物(例如,PTFE,PVDF,FEP,Viton等))以减小致动管组件3790与导管轴组件3706或手柄基部3763的内腔3674之间的摩擦。
再次参见图37L,致动管组件3790的近端,更具体地是第一海波管3791的近端,可固定地连接到致动器3780和阀3784中的至少一个。第一海波管3791通过密封元件3766从致动器3780延伸到手柄基部3763的内腔3764的近端部分。密封元件3766在致动管组件3790和手柄基部3763之间提供流体密封。第一海波管3791可加工成包括第一部分3791A和第二部分3791B,第一部分3791A和第二部分3791B的直径小于第一部分3791A的直径。第一海波管3791可包括一个或多个孔3794,其可在致动管组件内腔3793之间提供流体连通。如本文进一步详细描述的,通过阀3784注入内腔3793的流体(例如,盐水,肝素化盐水,造影剂等)可以流过该流体。腔3793直到孔3794,然后可以继续流过腔3793或流出孔3794然后通过腔3764。在一些示例中,第一海波管3791可以没有孔3794并且配置成使得流体注入内腔3793的流体仅通过内腔3793流动。
第一海波管3791的第一部分3791A可以具有略小于内腔3764的内径的外径。这样的直径差可以减小(例如,最小化)第一部分3791A的外表面和手柄基部3763的内表面减少(例如,最小化)流出孔3794的流体向近端流动和/或可减小第一部分3791A与手柄基部3763的内表面之间的摩擦。第二部分3791B第一海波管3791的第一海波管3791可以在第一海波管3791的第二部分3791B的外表面和手柄基部3763的内表面之间提供弧形或环形间隙或内腔。这样的直径差可以促使流体流出孔。第一海波管3791可以包括生物相容性材料,例如不锈钢,镍钛合金,塑料等。虽然描述为啊,但是通过内腔3764向远端流动。第一海波管3791可以用平板,实心棒等加工而成。
手柄基部3763的内腔3764的近端可包括扩张直径部分,其配置成接收密封元件3766(例如,包括O形环,垫片,垫圈等)。密封元件3766可以定位在第一海波管3791和手柄基部3763之间。密封元件3766可以密封内腔3764的近端,以阻止或防止流过孔3794的流体流出手柄基部3763。
第二海波管3792可以包括略小于第一海波管3791的内径的外径,使得第二海波管的近端可以插入第一海波管3791的远端。第二海波管3792可以固定地耦接到第一海波管3791,例如通过粘合剂(例如,氰基丙烯酸酯)、熔焊、钎焊、它们的组合等。第二海波管3792可以延伸到导管轴组件3706的近端。外径第二海波管3792的内径小于内腔3764的内径,形成弧形或环形间隙或内腔,其可提供开口段以使流体流动并使导体延伸。第二海波管3792可包括生物相容性材料,例如,不锈钢,镍钛诺,塑料等。虽然被描述为海波管,但是第二海波管3792可以由平板、实心杆等加工而成。
致动管3728从导管系统3700的近端部分3704延伸到导管系统3700的远端部分3704。致动管3728可以固定地耦接到第二海波管3792,例如通过粘合剂(例如,氰基丙烯酸酯)。第二海波管3792可包括内腔,内腔略大于致动管3728的外径,使得致动管3728的近端可延伸到内腔中。第二海波管3792的远端可以包括内腔,该内腔的内径略大于致动管3728的外径,并且第二海波管3793的远端可以延伸到第二海波管3792的近端。致动管3728可以包括多个层。例如,致动管3728可以包括柔性聚合物(例如,聚酰亚胺,聚酰胺,PVA,PEEK,Pebax,聚烯烃,PET,硅酮等),增强层(例如,包括编织物,线圈等)和内衬(例如,含氟聚合物(例如,PTFE,PVDF,FEP,Viton等))。
第二海波管3792可选地可以省略,例如通过向远端延伸第一海波管3791和/或向近端延伸致动管3728的柔性聚合物。第二海波管3792可以包括生物相容性材料,例如不锈钢,镍钛诺,塑料等。
致动管组件3790和导管轴组件3706组合以在手柄3710和可扩张结构3720之间形成两个同心内腔。致动管3728的致动管组件内腔3793形成内部内腔。内部内腔3793可以与止血阀3784流体连通。内部内腔3793的远侧末端可以是致动器管组件3790的远端,其耦接到近端毂3740。止血阀3784可以允许插入导丝,其可以延伸通过致动管3728并且向远端延伸超出可扩张结构3720的远端毂3750。外部内腔3707在致动管组件3790的外表面和导管轴组件3706的内表面之间是弧形的或环形的。外部内腔3707的远侧末端是导管轴组件3706的远端,其耦接到近端毂3740。
止血阀3784可用于注射流体(例如,盐水,肝素化盐水,造影剂等)。可将流体注入止血阀3784(例如,通过IV袋,注射器等)。流体可以流过第一海波管3791直到孔3794。流体可以继续流过致动管组件3790的内部内腔3793从远端毂3750出来和/或可以流过孔3794然后流过外部内腔3707从近端毂3740出来。再次参见图37G-37I,近端毂3740包括外围内腔3743。流体通过外围内腔3743中的至少一个流出外部内腔3707。流经外围内腔3743的流体可以与该外围内腔3743的闭塞水平成反比(例如,由于导体3712的占据)。在一些示例中,第一海波管3791可以不包括孔3794,并且流体可以仅流过致动管组件37990的内部内腔3793到远端毂3750。
冲洗流体可以在内腔内提供轻微的正压力,这可以抑制血液流入导管系统3700。冲洗流体可以清洗可扩张结构3720和/或导管系统3700的其他部分,这可以抑制手术期间血栓形成。如果流体包括造影剂,则冲洗流体可以引导造影剂以辅助荧光检查和可扩张结构3720相对于血管的可视化。
手柄基部3763可包括孔3765,孔3765延伸通过侧壁进入内腔3764,例如与第二海波管3792和手柄基部3763之间的弧形或环形间隙或内腔连通。导体3712可从电连接器3799,通过连接器管件3798,穿过孔3765,进入外腔3707,通过近端毂3740(例如,如图37I所示),并到达电极3724。
图37N是导管轴组件3706和第二海波管3792的示例的近端的透视图。导管轴组件3706从手柄3710到近端毂3740围绕致动管3728。致动管3828可以相对于导管轴组件3706向近端缩回和/或向远端推进。
导管轴组件3706可包括多个层。例如,导管轴组件3706可包括柔性聚合物(例如,聚酰亚胺,聚酰胺,PVA,PEEK,Pebax,聚烯烃,PET,硅树脂等),增强层(例如,包括编织物,线圈等)和内衬(例如,含氟聚合物(例如,PTFE,PVDF,FEP,Viton等))。沿不同纵向部分可存在不同的层。
柔性聚合物可包括例如聚酰亚胺,聚酰胺,PVA,PEEK,Pebax,聚烯烃,PET,硅树脂等。管件的不同纵向部分沿导管轴组件3706的长度可具有不同的硬度。例如,导管轴组件3706可以从近端到远端从较高的硬度(指示较硬的材料)过渡到较低的硬度,指示较软的材料。可变硬度的部分的长度和硬度可以设置(clock)为适合于在手术期间这些部分将驻留在其中的不同解剖学结构。例如,导管轴组件3706可包括至少五个不同硬度的部分:具有约72D的硬度的第一部分,其具有被配置为通过靠近心脏的颈动脉从手柄3710延伸进入体内的长度;具有约63D的硬度的第二部分和具有约55D的硬度的第三部分,其一起具有配置成穿过右心房和右心室的长度;以及具有约40D的硬度的第四部分和具有约25D的硬度的第五部分,其一起具有配置成延伸通过肺动脉并进入右肺动脉的长度。第四部分和/或第五部分的柔韧性可允许导管轴组件3706屈曲并固定导管轴组件,例如抵靠肺动脉干的左侧,这可有助于将可扩张构件3720适当地定位在肺动脉中。第四部分和第五部分中的至少一个可包括铰接件3726,例如如本文所述,如果导管轴组件3706例如从肺动脉干向右肺动脉进行急性(例如90°)转动,则铰接件3726可以抵抗扭结。就导管轴组件3706的总长度的百分比而言,五个部分的长度可以是第一部分约50-90%之间并且每个其余部分约1-20%之间。例如,长度可分别为约73%,7.5%,5.5%,5.5%和8.5%。根据导管轴组件3706的总长度,第一部分可以更长或更短,这可以取决于通往肺动脉的通路,位于体外的量等。
导管轴组件3706可具有介于约50和200cm之间的长度(例如,约50cm,约75cm,约100cm,约125cm,约150cm,约200cm,这些值之间的范围等)。导管轴组件3706的长度可以适合于将可扩张结构3720从外周静脉(例如颈静脉,股静脉,桡静脉或其他合适的进入位置)定位在肺动脉中。
导管轴组件3706的柔性可以附加地或替代地通过其他方式调节,例如加强和调节导管轴组件3706的各个部分。例如,如果导管轴组件3706包括加强线圈,则可以改变线圈的节距。又例如,如果导管轴组件3706包括加强编织物,则可以改变编织线的参数(例如,数量,厚度,编织角等)。对于另一个例子,如果导管轴组件3706包括加强编织物,则可以改变编织线的参数(例如,数量,厚度,编织角等)。再例如,厚度可以变化。对于又一个例子,可以改变组成(例如,不同部分包括至少一种不同材料)。两种或所有变化的组合也是可能的。除了是离散的部分之外,柔韧性可以从一个部分过渡到下一部分。
图37N示出了导管轴组件3706的近端,该导管轴组件3706包括第一部分3708和比第一部分3708厚的第二部分3709。致动轴组件3706的近端(例如第一部分3708)处的厚度变化可以提供应变消除机制。第二部分3709可以具有外径,该外径配置成配合在手柄基部3763的内腔3764中以可固定地耦接到手柄基部3763。
图37O是导管轴组件3706的远端与可扩张结构3720的近端毂3740之间的示例性连接的侧剖视图。导管轴组件3706的远端可包括铰接件3726,其被配置为可固定地耦接到近端毂3740。
铰接件3726可包括例如线圈或一系列间隔线圈,其稍微延伸超出导管轴组件3760的其他部分的远端,例如PTFE衬里,丝线编织物和柔性管件。铰接件3726可包括以螺旋图案配置的一根或多根丝线(例如,一根丝线,两根丝线,三根丝线或更多根丝线)。丝线包括具有均匀节距的螺旋缠绕线圈。每个线圈可占据其他线圈的螺旋旋转之间的空间。图37P是包括三根丝线的铰接件3726的示例的端部的透视图。铰接件3726可包括海波管,例如切割成包括线圈图案和/或相对的周向槽。
铰接件3726可以定位在近端毂3740的近端部分3741的外表面周围。铰接件3726可以通过粘合剂(例如,氰基丙烯酸酯)、钎焊、熔焊、其组合等可固定地耦接到近端毂3740。导管轴组件3706的远端可包括层,该层与铰接件3726的远端近端地间隔约0.01英寸至约0.1英寸(例如,约0.01英寸,0.025英寸,0.05英寸,0.075英寸,0.01英寸,这些值之间的范围等),这可以为铰接件3726提供足够的空间,以便将铰接件3726固定(例如,直接固定)到近端毂3740而不受这些层的干扰。导管轴组件3706的柔性管件、丝线编织物、衬里和/或其他层的远端可以与近端毂3740的近端纵向间隔开,这可以减少导管轴组件3706上的力传递,例如由铰接件3726吸收,而不会被传递到可扩张结构3720。
铰接件3726可以由铰接件管3711覆盖,铰接件管3711可以包括聚氨酯或其他合适的材料,并且从铰接件3726的远端延伸经过铰接件3726的近端,例如以防止铰接件3726夹住组织。铰接件管3711可以热固化到铰接件3726和导管轴组件3706的其他部件的外周。铰接件管3711可以与近端的远端部分3742基本对齐、齐平或重叠。铰接件管3711可以与近端毂3742形成流体密封,例如使得在内腔3707中流动的流体离开外围内腔3744。
图37Q是处于解锁配置的导管系统(例如,导管系统3700)的示例性手柄3701的透视图。图37R示意性地示出了图37Q的手柄3701沿线37R-37R的透视横截面视图。除了手柄3701之外,图37Q和37R示出了从其延伸的导管轴组件3706的一部分。手柄3701配置成保持在身体外部。手柄3701包括用户可以抓握的外手柄3713。外手柄3713包括从外手柄3713的近端延伸到外手柄3713的远端的内腔3714。内腔3714可配置成接收管状基部3715,管状基部3715可部分地插入内腔3714中并可固定地耦接到外手柄3713。管状基部3715可以是大致圆柱形的并且可以包括锥形远端。其他几何形状(例如,多边形)也是可能的。管状基部3715可以延伸出内腔3714的远端(如图37Q和37R所示)或者可以完全接收在内腔3714内。管状基部3715包括从管状基部3715的近端延伸到管状基部3715的远端的通道3716。管状基部3715可以包括延伸到通道3716中的肩部3717,该肩部3717配置成与导管轴组件3706的近端相互作用。导管轴组件3706可以固定地耦接到管状基部3715,这通过将导管轴组件3706的近端插入通道3716中然后将导管轴组件3706固定到管状基部3715,例如通过粘合剂(例如,氰基丙烯酸酯)、钎焊、熔焊、其组合等。致动管组件3790可以可滑动地接收在通道3716中,并且致动管组件3790的一些部分可以延伸通过导管轴组件3706,例如如本文所述。管状基部3715可包括位于通道3716近端附近的通道3716的侧壁中的环形凹部3718,其配置成接收密封元件(例如,包括O形环,垫片,垫圈等)。密封元件可以定位在第一海波管3791和管状基部3715之间,并且可以抑制或防止流过第一海波管3791的孔3794的流体流出管状基部3715。在一些示例中,环形凹部3718可以延伸到管状基部3715的近端。
致动轴组件3790的近端可耦接到致动销3730。致动销3730包括致动通道3731,致动通道3731从致动销3730的近端延伸到致动销3730的远端。致动通道3731配置成接收致动管组件3790的近端(例如,第一海波管3791),其可部分地插入致动通道3731中并且可固定地耦接到致动通道3731,例如通过粘合剂(例如,氰基丙烯酸酯),焊接,焊接,它们的组合等。致动销3730可包括扩张直径的握持部3732,以便于用户的握持。扩张直径的握持部3732可包括纹理化表面。致动通道3731可包括在其近端处的扩张直径部分,其配置成接收管连接器3797。管连接器3797可以是Y形的,包括两个相交的通道。管连接器3797的通道可用于插入导丝、电导体和/或将流体注入致动管组件内腔3793,如本文其他地方所述。连接器管件3797可包括鲁尔配件,其包括单个内腔。
外手柄3713可包括在上表面和下表面之间延伸并与外手柄3713的内腔3714相交的空隙3719。在一些示例中,空隙3719可延伸到手柄3713的侧表面,使得其打开到外手柄3713的上表面、下表面和侧表面。空隙3719可以被配置成接收锁定构件3777。图37S是锁定构件3777的示例的透视图。锁定构件3777可以包括大致为圆柱形的主体和通道3778,通道3778通过大致圆柱形的主体从锁定构件3777的近端侧延伸到锁定构件3777的远端侧。锁定构件3777可包括至少一个突出部3789,其从通道3778的侧壁径向向内延伸。如果锁定构件包括两个突出部3789,则两个突出部3789可以位于通道3778的相对侧上。如果通道3778是椭圆形的,则该突出部3789可以沿着通道3778的较长尺寸长度定位(例如,沿着较长尺寸长度的在中心位置)。锁定构件3777可以包括远离通道3778延伸的突片3779,例如在垂直于通道3778的纵向轴线的方向上。突片3779和大致圆柱形主体可以形成b形,d形,p形或q形。致动销3730可以延伸通过通道3778。手柄3701可以包括衬套3796,衬套3796配置成接收在外手柄3713的近端中,衬套3796可以固定在此处。衬套3796可以包括通道,致动销3730延伸通过该通道。锁定构件3777可以绕致动销3730的纵向轴线是可旋转的。锁定构件3777可配置成将手柄3701和致动管组件3790置于锁定或解锁配置。在一些示例中,可以限制锁定构件3777的旋转度。如图37Q的示例所示,突片3779可以仅允许锁定构件3777在突片3779邻接外壳3713的一部分之前旋转大约四分之一圈。
图37T示意性地示出了图37Q的手柄3701在图37R的圆形37T的区域中处于解锁配置的放大透视剖视图。致动销3730可包括一系列脊3733和沿其外圆周间隔开的中间凹口。脊3733可以垂直于致动销3730的纵向轴线。脊3733可以沿着致动销3730的两个相对侧远离致动销3730的圆周延伸。例如,致动销3730的圆周可以分为多个近似四分之一,并且脊3733可以从圆周的两个不相邻的四分之一延伸。圆周的脊3733不延伸的几个四分之一可以包括沿着致动销3730的长度延伸的平坦表面,如图37Q所示(其中一个平面可见)。沿着锁定构件3777的通道3778的突出部3789可以被配置成接收在两个脊3733之间的凹口中。突出部3789可以被配置成当定位在凹口中时与致动销3730的外圆周配合。当处于解锁配置时,锁定构件3777的旋转取向将突出部3789定位在致动销3730的平坦表面附近。如图37T所示,在解锁配置中,突出部3789未定位在脊3733之间。当处于解锁配置时,突片3779可定位在第一位置(例如,向上位置,远离外手柄3713的表面延伸)。在解锁配置中,致动销3730可以由用户在近端或远端方向上平移,这导致致动管组件3790的平移,该致动管组件3790刚性地固定到致动销3730。用户可以通过在近侧方向上拉动致动销3730来扩张可扩张结构3720。用户可通过在远侧方向上推动致动销3730来压缩可扩张结构3720。当处于解锁配置时,在用户不推动或拉动致动销3730的情况下,可扩张结构3720可呈现自扩张状态。锁定构件3777可以没有突片3777,例如包括像拇指轮那样的纹理化表面。
图37U是处于锁定配置的图37Q的手柄3701的透视图。用户可以通过将锁定构件3777的突片3779移动到第二位置以将锁定构件3777绕致动销3730旋转大致四分之一圈来将手柄3701置于锁定配置。外手柄3713可以包括肩部3795(图37Q)以限制突片3779的旋转。在锁定配置中,突片3779可以不再远离手柄3701的表面延伸,而是可以与手柄3701的表面齐平。如图37Q和37U所示,突片3779在解锁和锁定配置中的不同定位可以提供手柄3701的配置的视觉上可辨别的指示器。
图37V示意性地示出了图37U的手柄3701沿着线37V-37V的透视横截面视图。当处于锁定配置时,突出部3789(在所示示例中的两个突出部3789)已经旋转到致动销3730的脊3733之间的两个凹口中,从而抑制或防止致动销3730和与其耦接的致动管组件3730在近侧方向上移动和在远侧方向上移动。手柄3730的锁定可以抑制或者防止可扩张结构3720进一步径向扩张和径向压缩。用户可以将突片3779部分地转动到大约所需的锁定位置,然后可以推动或拉动致动销3779,直到突出部3789落在脊之间的位置。在一些示例中,突出部3789的宽度可以与凹口形成紧密的过盈配合,使得当锁定或解锁锁定构件3777时会感觉到“搭扣”。为了解锁锁定构件3777,用户可以将突片3779放回直立位置,在用于锁定锁定构件3777的相反方向上旋转大约四分之一圈。锁定构件3777可被配置为被转动多于或少于四分之一圈以在锁定和解锁配置之间切换。
手柄3701可以允许用户通过将致动销3730推动或拉动所需量来快速和/或容易地调节可扩张结构3720的扩张。致动销3730和致动管组件3790可以根据由一系列脊3733和中间凹口的节距确定的离散增量沿着纵轴锁定就位。可以修改节距和突出部3789,以允许对可扩张结构3720的扩张和压缩进行更窄或更宽的调节(例如,宽度可以小于图37Q-37U所示的宽度,以提供更多的锁定位置)。在一些示例中,锁定构件3777可以仅包括一个突出部3789和/或致动销3730可以仅包括一个平坦表面。在一些示例中,致动销3730可包括纹理化表面(例如,包括凹槽、凸起、凸缘等),其配置成与锁定构件3777摩擦接合。突出部3789和脊3733之间的凹口可以是对应的锯齿形状。在这样的示例中,如果施加足够的力以迫使脊3733在锯齿突出部3789上方的话,锁定构件3777可以配置成允许致动销3730在锁定配置中平移(例如,故障情况下回到可扩张构件3720的自扩张状态)。
图38A是导管系统3800的示例的透视图。系统3800可包括配置成保持在受试者体外的近端部分和配置成插入受试者的脉管系统中的远端部分,例如关于导管系统3800所述。系统3800包括可扩张结构3820。可扩张部分3820耦接到导管轴3806。在一些示例中,系统3800包括导管轴3806和可扩张部分之间的应变消除装置3826。应变消除装置3826可以至少部分地位于导管轴3806的内腔中。
可扩张结构3820包括多个样条3822。样条3822包括正弦或波浪或起伏或锯齿形形状。正弦形状可以在电极定位方面提供更大的灵活性。例如,电极可以放置在峰处、谷处和/或上升或下降部分处。在一些示例中,电极定位为从峰挺出,这可以允许电极与血管壁紧密接触。正弦形状可以提供更好的壁贴近,例如在峰处形成锚固点。样条3822中的至少一个包括电极阵列,该电极阵列包括多个电极以形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以与本文所述的其他系统一致。在一些示例中,样条3822包括丝线,丝线的直径在约0.006英寸(约0.15mm)和约0.015英寸(约0.38mm)之间(例如,约0.006英寸(约0.15毫米),约0.008英寸(约0.2毫米),约0.01英寸(约0.25毫米),约0.012英寸(约0.3毫米),约0.015英寸(约0.38毫米),介于这些值之间等)。在一些示例中,样条3822可以从海波管切割,然后形状设置成正弦形状。
图38B是处于塌缩状态的图38A的导管系统3800的一部分的透视图。所示部分包括导管轴3806、应变消除装置3826和可扩张结构3820的一部分。所示部分还包括致动构件3828,其可以耦接到致动器机构以引起可扩张结构3820的扩张或缩回。致动构件3828可以在导管轴3806的内腔中。导丝3815也示为在致动构件3825的内腔中。在一些示例中,致动构件3828包括能够接收0.018英寸导丝3815的内腔。致动构件3828可包括管状结构,例如关于致动管组件3790所述。致动构件3828可包括具有或不具有内腔的丝线。
图38C是处于扩张状态的图38A的导管系统3800的一部分的侧视图。致动机构3612的操作可以使可扩张结构3620扩张和收缩。例如,致动机构3612的旋转和/或纵向移动可以使致动器丝线3628向近端缩回,导管轴3606向远端推进,或其组合,其中每种情况都可以将样条3622径向向外推动。在一些示例中,样条的远端3622耦接到远端毂,该远端毂耦接到致动器丝线3628,并且样条3622的近端耦接到近端毂,该近端毂耦接到导管轴3606。在扩张状态,可扩张结构3620包括在样条3622的径向向外位置处大致平行于纵向轴线、彼此间隔开的样条3622。样条3622的平行取向可以提供样条3622的周向间距,例如,与单个样条或可以周向地成束的丝线不同。在一些示例中,样条3622包括丝线,丝线的直径在约0.006英寸(约0.15毫米)和约0.015英寸(约0.38毫米)之间(例如,约0.006英寸(约0.15毫米),约0.008英寸(约0.2毫米),约0.01英寸(约0.25毫米),约0.012英寸(约0.3毫米),约0.015英寸(约0.38毫米),介于这些值之间,等等)。
在一些示例中,处于扩张状态的可扩张结构3820的直径在约15mm和约30mm之间(例如,约15mm,约20mm,约22mm,约24mm,约26mm,约28mm,约30mm,在这些值之间的范围等)。在一些示例中,样条3822可以是自扩张的,使得致动机构允许样条从压缩状态自扩张以引导到目标部位成为扩张状态以在目标部位进行治疗。在某些这样的示例中,处于扩张状态的可扩张结构3820的直径可以超过大多数受试者的预期脉管系统的大小以确保血管壁贴近。在一些示例中,样条3822可以是非自扩张的,使得样条仅在致动机构的操作时扩张。在一些示例中,样条3822可以是自扩张的,并且致动机构可以进一步扩张样条3822,这可以提供可调节的可扩张结构3820的直径可用于一系列血管尺寸、壁贴近力等。可扩张结构3820在发生错误时不与壁贴近的示例对于安全性可能是有利的,例如关于系统2200所述。
图38D是可扩张结构3820的局部侧剖视图。可扩张结构包括远端毂3830,远端毂3830包括多个通道3832,样条3822的远端部段定位在所述通道3832中。在一些示例中,样条3822的远端部段不固定,使得它们可以在通道3832中滑动,这可以允许每个样条3822独立地移动,这可以适应部署部位处的曲率。在某些这样的示例中,样条3822的远端包括止动构件(例如,扩张直径球焊),其抑制或防止远端部段离开通道3832和远端毂3830。这样的系统也可以与本文所述的其他导管系统和可扩张结构(例如,可扩张结构3620,3630,3640,3650)一起使用。
图38E是可扩张结构3840的局部侧剖视图。可扩张结构3840包括具有正弦形状的多个样条3842。可扩张结构3840包括在多个三个样条3842的峰处的多个电极3844以形成3×4电极矩阵。在三个样条包括电极的一些示例中,中间或中心样条可以与周向相邻的样条不同。例如,中间样条可以包括更多或更少的峰、在纵向上偏移的峰等。在可扩张结构3820扩张时,可以选择性地激活电极矩阵的电极以测试神经捕获、校准和/或治疗,例如如本文所述。
图39A是可扩张结构3900的示例的侧视图。可扩张结构3900可以结合到导管系统中,例如结合到本文所述的导管系统中。可扩张结构3900包括多个样条3902。样条3902可以屈曲以形成径向偏移的平行部分3904。平行部分3904可以包括电极、电极结构等。在一些示例中,样条的屈曲部分用作铰接件以抵靠血管壁推动偏移的平行部分3904。可扩张结构3900可以自扩张,可以使用致动机构扩张,以及它们的组合,例如如本文所述。图39A示出了沿周向偏移约90°的四个样条3902,但是其他数量的样条和偏移也是可能的。
图39B是另一可扩张结构3910的示例的端视图。可扩张结构3910包括六个样条3912,其中三个分组在平面3914的一侧上,并且其中三个分组在平面3914的另一侧上。在一些示例中,一组样条3912可以包括电极,而另一组样条3912可以没有电极并且用于壁贴近、锚固等。在一些示例中,图39B表示图36H的一部分。例如,可扩张结构3900,3910可包括关于图36A-36O描述的样条的一部分(例如,一半)。
图39C是又一可扩张结构3920的示例的端视图。可扩张结构3920包括六个样条3922和六个样条3924。类似于样条3902,样条3922包括径向偏移的平行部分。样条3924各自大致平行于相邻的样条直到屈曲,并继续径向向外延伸。
图39D是又一可扩张结构3930的示例的端视图。可扩张结构3930包括第一样条3932、第二样条3934和六个样条3936。类似于样条3902,样条3922包括径向偏移的平行部分。与样条3902类似,样条3924也包括径向偏移的平行部分,该平行部分在与样条3922不同的方向上径向偏移。样条3936径向向外延伸,在样条3932,3934之间沿周向有一个样条3936。样条3932,3934和在样条3932,3934之间沿周向的样条3936可以包括形成电极矩阵的电极。在一些示例中,图39D表示图36L的一部分。例如,可扩张结构3900,3910,3920,3930可包括关于图36A-36O描述的样条的一部分(例如,一半)。
可扩张结构3900,3910,3920,3930的平行部分可以是直的、凹的、凸的、正弦的、纵向偏移的、承载网格等,例如如本文所述。
图40A是用于导管系统的应变消除装置4026的示例的透视图。应变消除装置4026可以像柔性铰接件一样用于将导管力与可扩张结构分离,例如在本文所述的导管系统中。应变消除装置4026包括弹簧。该弹簧可包括可变螺旋,其可纵向地改变柔性。在一些示例中,弹簧可嵌入聚合物中。在一些示例中,聚合物可具有硬度,该硬度与螺旋可变性在纵向上一致地变化和/或在纵向上与螺旋可变性偏移。在一些示例中,应变消除装置不包括弹簧,而包括具有纵向变化的硬度的聚合物。在一些示例中,可以编织多个相反手性的螺旋以形成应变消除装置。
图40B是用于导管系统的应变消除装置4027的另一示例的透视图。应变消除装置4027可以像柔性铰接件一样用于将导管力与可扩张结构分离,例如在本文所述的导管系统中。应变消除装置4027包括切割海波管。在图40B所示的示例中,切割包括具有第一手性(例如,顺时针缠绕)的第一螺旋4002和具有相同第一手性的第二螺旋4004。第一螺旋4002与第二螺旋4004纵向偏移。在一些示例中,切割图案可包括可变螺旋,其可纵向改变柔性。在一些示例中,海波管可嵌入聚合物中。在一些示例中,聚合物可具有硬度,该硬度与螺旋可变性在纵向上一致地变化和/或在纵向上与螺旋可变性偏移。其他切割图案也是可能的。例如,切割图案可包括单个螺旋。对于另一示例,切割图案可包括通过一个或多个支柱连接的多个横向槽或切口。在一些示例中,切割海波管可提供拉伸强度。
图41A是导管系统4100的示例的透视图。系统4100包括配置成保持在受试者体外的近端部分4102和配置成插入受试者的脉管系统中的远端部分4104。远端部分4104包括第一可扩张结构4120和第二可扩张结构4122。近端部分包括致动机构4112。近端部分4102通过导管轴4106耦接到远端部分4104。在一些示例中,导管轴略微刚性使得导管轴4106可以贴合侧壁并帮助将系统4100锚固在目标位置。近端部分4102可以包括包含多个端口的适配器,例如包括第一Y适配器端口4116和第二Y适配器端口4118的Y适配器。第一Y适配器端口4116可与与第二可扩张构件流体连通的内腔连通。第二Y适配器端口4118可以用于将系统4100的电极矩阵耦接到刺激器系统4119。在一些示例中,近端部分4102包括刺激器系统4119。例如,近端部分4102可以包括被配置为向电极矩阵提供刺激的电子器件,传感器(例如,与导管轴4106的流体填充内腔连通),用于从传感器接收数据的电子器件,用于闭环控制的电子器件,用于向用户(例如,内科医生、护士、受试者)提供反馈的电子器件,用户(例如,内科医生、护士、受试者)的输入机构等。
图41B是处于塌缩和紧缩状态的图41A的导管系统4100的部分4104的透视图。图41C是图41B的部分4104的横向横截面侧视图。所示的远端部分4104包括导管轴4106、第一可扩张结构4120、第二可扩张结构4122和管状构件4128的一部分。第一可扩张结构4120包括耦接到导管轴4106的多个样条。管状构件4128可以在导管轴4106的内腔中。在一些示例中,样条的远端耦接到远端毂,远端毂耦接到管状构件4128,并且样条的近端耦接到导管轴4106。样条的远端部段可以在远端毂中可滑动,例如,如本文所述。管状构件4128包括内腔4129。内腔4129与第二可扩张构件4122流体连通。
第二可扩张构件4122可以与第一可扩张构件4120相邻(例如,0cm的距离)或与第一可扩张构件4120纵向(向近端或向远端)间隔多达约5cm(例如,约0.25厘米,约0.5厘米,约1厘米,约1.5厘米,约2厘米,约2.5厘米,约3厘米,约4厘米,约5厘米,这些值之间的范围等)。间隔的量,如果有的话可以至少部分地取决于目标部位的位置、导管轴4106的硬度、第一可扩张构件4120的样条的数量、第一可扩张构件4120的扩张直径等。
图41D是处于膨胀状态的图41B的4104部分的侧视图。具体地,第二可扩张构件4122被膨胀。在一些示例中,可注射流体(例如,盐水、造影剂等)进入内腔4129直到第二可扩张构件4122径向扩张。在一些示例中,第二可扩张构件4122可以纵向扩张。膨胀的第二可扩张构件4122可以是斯旺-甘兹氏球囊,其可以用于使远端部分4104浮动到目标部位,例如肺动脉。与通过导管系统4100跟踪导丝不同,导管系统4100可以包括其中第二可扩张构件包括电极矩阵的一体化系统。在一些示例中,导管系统4100可以没有第二可扩张构件4122和/或可以被配置为通过导丝跟踪,该导丝可以在引入导管系统4100之前定位在脉管系统中(例如,在右肺动脉4143中),例如如本文所述,使用斯旺-甘兹氏技术、荧光检查引导转向等。
图41E是处于扩张状态的图41B的4104的部分的透视图。具体地,第一可扩张构件4120扩张。在一些示例中,致动机构4112的操作可以使第一可扩张结构4120扩张和收缩。例如,致动机构4112的旋转和/或纵向移动可以引起管状部件4128向近端缩回,导管轴4106向远端推进,或其组合,每种情况都会径向向外推动第一可扩张构件4120。在某些这样的示例中,管状构件4128可以通过使流体流动通过内腔4129而使第二可扩张构件膨胀并且可以通过向近端缩回来扩张第一可扩张构件4120。双功能管状构件4128可以减小导管系统4100的质量和/或复杂性。在一些示例中,可以使用不同的结构来实现这些功能中的一个或多个。例如,在一些示例中,样条可以自扩张,使得致动机构4112或另一机构(例如,护套在样条上方的缩回)允许样条从压缩状态自扩张以导航到目标位置成为扩张状态以在目标部位进行治疗。在某些这样的示例中,处于扩张状态的第一可扩张结构4120的直径可以超过大多数受试者的大多数预期脉管系统的大小以确保血管壁贴近。在一些示例中,样条可以是非自扩张的,使得样条仅在致动机构4112的操作时扩张。在一些示例中,样条可以是自扩张的,并且致动机构4112可以进一步扩张样条,这可以提供可调节的第一可扩张结构4120的直径,其可用于一系列的血管尺寸、壁贴近等。在发生错误的情况下第一可扩张结构4120不与壁贴近的示例对于安全是有利的,例如关于系统2200所述。在一些示例中,丝线不向远端固定(例如,到远端毂),这可以允许每根丝线独立地移动,这可以适应部署部位处的曲率。
在扩张状态下,第一可扩张结构4120包括在包括远端部分4104的纵向轴线的平面的一侧上彼此周向间隔开的样条。在一些示例中,样条包括的丝线直径在约0.006英寸(约0.15mm)和约0.015英寸(约0.38mm)之间(例如,约0.006英寸(约0.15mm),约0.008英寸(约0.2mm),约0.01英寸(约0.25mm),约0.012英寸(约0.3mm),约0.015英寸(约0.38mm),在这些值之间的范围等)。在一些示例中,处于扩张状态的可扩张结构4120的直径在约15mm和约30mm之间(例如,约15mm,约20mm,约22mm,约24mm,约26mm,约28mm,约30mm,这些值之间的范围等)。
第一可扩张构件4120的样条可以包括电极阵列,该电极阵列包括多个电极以形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以与本文所述的其他系统一致。例如,在一些示例中,可扩张结构4120包括包含电极的网状物或膜,其跨越两个或更多个样条伸展。在第一可扩张结构4120的扩张时,电极矩阵的电极可以选择性地激活以测试神经捕获、校准和/或治疗,例如如本文所述。
图41F示意性地示出了在脉管系统中扩张的第一可扩张结构4120。脉管系统可包括例如肺动脉干4132、右肺动脉4134和左肺动脉4136。在一些示例中,导管4106是不对称的,使得导管轴4106可在浮动期间屈曲以自然地将第一可扩张结构4120与右肺动脉4134对齐。在第一可扩张结构4120扩张后,导管系统4100可以向近端缩回,直到第一可扩张结构4120卡入到位。在定位第一可扩张构件4120后,第一可扩张结构4120的样条上的电极可用于刺激目标神经4138。
图41G示意性地示出了在脉管系统中扩张的第一可扩张结构4120的另一示例。脉管系统可包括例如肺动脉干4132,右肺动脉4134和左肺动脉4136。屈曲和抵靠肺动脉干4132的左侧定位管状构件4128可将第一可扩张结构4120定位并锚固在右肺动脉4134中处于刺激目标神经4138的位置。
在一些示例中,第一可扩张结构4120的扩张使远端部分4104相对于导管轴4106屈曲。这种屈曲可有利地帮助将远端部分4104锚固在目标部位。例如,管状构件4128可以贴近血管的第一侧并且导管轴4106可以与血管的相对侧贴近。
图42A是电极结构4224的示例的侧视图。电极结构4224可以与如本文所述的可扩张结构一起使用。在图42A中,电极结构4224示出在可扩张结构的样条4222上。电极结构4224包括多个电极4202和围绕电极4202的绝缘部4204。电极4202围绕电极结构4224的圆周延伸。电极结构4224可以单独形成,然后在样条4222上方滑动。
图42B是电极结构4225的另一示例的侧视图。电极结构4225可以与如本文所述的可扩张结构一起使用。在图42B中,电极结构4225示出在可扩张结构的样条4222上。电极结构4225包括多个电极4203和围绕电极4203的绝缘部4204。电极4203部分地围绕电极结构4225的圆周延伸。电极结构4225还包括在内侧上的绝缘部4205,其可以使电极4203绝缘并且径向向外引导能量。电极结构4225可以单独形成,然后在样条4222上方滑动。
图43A是电极4302的示例的侧视图。电极4302是可以耦接到样条或网格的纽扣电极。电极4302不包括绝缘部,使得能量可以在所有方向上发射。
图43B是电极4303的另一示例的侧视图。电极4303是可以耦接到样条或网格的纽扣电极。电极4303包括绝缘部4305,使得能量从非绝缘区域发射,这可以提供方向控制。
图44A是电极4402的示例的侧视图。电极4402是管电极,其可以耦接到样条或网格。电极4303不包括绝缘部,使得能量可以在所有方向上发射。
图44B是电极4403的另一示例的侧视图。电极4403是可以耦接到样条或网格的管电极。电极4403包括绝缘部4405,使得能量从非绝缘区域发射,这可以提供方向控制。在一些示例中,电极4403在样条周围的旋转位置固定,例如将能量径向向外引导。
图45是对接近血管壁的神经的神经刺激的示意图。电极4508定位在血管腔4506中,并且血管壁4504靠近或邻近神经4502。电极4508部分地绝缘(例如,如在电极4303中),使得能量主要从一侧辐射。电极4508可具有介于约1mm2和约3mm2之间的面积。在一些示例中,电极4508包括铂铱。在一些示例中,电极4508的非绝缘表面被处理,例如以增加表面区域。能量从电极4508的表面辐射并在血管壁4504中消散。一部分能量从血管壁4504辐射出并捕获神经4502的一部分。神经4502也消散能量,其不会延伸远超出神经4502,这可以减少捕获其他不需要的或非预期的神经的可能性,从而可以减少诸如疼痛、咳嗽等副作用。神经的直径4503可以在约1mm和约2mm之间。即使具有绝缘,也可以从相对表面向血管腔4506中发射一些能量,其中血液或其他材料可以消散能量。
表1显示了三种不同变化后右心室收缩性和左心室收缩性变化之间的相关性。相关性是逐心跳分析。压力测量由Millar(米勒)导管进行,其包括MEMS压力传感器,以最大(dP/dt)(max(dP/dt))为单位,被用作收缩性的替代指标。
第一变化,多巴酚丁胺注入,提供了超过500%的非常高的收缩性增加。右心室收缩性和左心室收缩性之间的平均相关性非常好,为0.91,其中1.00是完美的相关性。因此,如果给予受试者多巴酚丁胺注入,测量右心室收缩性的变化可以提供关于左心室收缩性变化的准确信息。第一次变化重复三次。
第二变化,5mL的钙注入,提供约20%的收缩性增加。图46A显示通过米勒Mikro-Cath(MEMS)压力传感器导管测量的以蓝色表示的左心室压力,通过与流体填充内腔连通的压力传感器测量的以黄色表示的右心室压力,和通过米勒Mikro-Cath(MEMS)压力传感器导管测量的以紫色表示的右心室压力以及通过米勒Mikro-Cath(MEMS)压力传感器导管在主动脉中测量的以绿色表示的动脉压。使用导管上的米勒(MEMS)传感器的右心室收缩性和左心室收缩性之间的平均相关性非常好,为0.91。使用与外部压力传感器连通的斯旺-甘兹氏导管的液体填充内腔的右心室收缩性与左心室收缩性之间的平均相关性也非常好,为0.87。因此,在某些情况下,如测量动物(正常,非HF羊模型)模型,如果给予受试者钙注入,则用MEMS传感器或流体填充内腔测量右心室收缩性的变化可以提供关于左心室收缩性变化的准确信息。
第四变化,如本文所述的神经刺激,提供约28%的收缩性增加。右心室收缩性与左心室收缩性之间的相关性非常好,为0.90。因此,如果受试者被给予神经刺激,则测量右心室收缩性的变化可以提供关于左心室收缩性变化的准确信息。图46B对于神经刺激变化以青色显示了左心室收缩性并以金色显示了右心室收缩性,其中在约35秒后施加神经刺激然后在施加约两分钟后关断。在钙注入后的前几次搏动中,左心室收缩性急剧增加,但右心室收缩性仅略有增加。此后,左心室收缩性呈对数或指数逐渐减小,但右心室收缩性下降很慢。这些不同有助于说明为什么左心室收缩性和右心室收缩性之间的相关性对于钙注入相关性很差。不重复第四变化。
表1

在一些示例中,MEMS压力传感器可以集成到本文所述的导管系统中,例如被配置成驻留在右心室中以测量右心室收缩性,其可以准确地与左心室收缩性相关联以用于神经刺激。在一些示例中,替代的压力测量系统,例如流体填充(例如,盐水填充)内腔,其具有与外部压力传感器连通的第一端(例如,经由鲁尔接头连接)和与孔连通的第二端,被配置为驻留在右心室中以测量右心室收缩性,其可以准确地与左心室收缩性相关联以进行神经刺激。MEMS压力传感器可以提供比压力感测内腔更高的保真度(更直接的反馈)。MEMS压力传感器可以占用较小的导管体积,因为它们不包括内腔,这可以减小导管的尺寸和/或提供用于其他装置的附加空间。MEMS压力传感器可以更容易设置,例如与用流体填充内腔并将流体填充内腔正确地耦接到传感器相比。MEMS压力传感器可以更容易在解剖学上放置。更容易设置和/或放置可以导致更准确的结果。MEMS压力传感器可以减少或消除鞭状效应(whipeffect),其中流体填充内腔的曲率在弯曲周围屈曲时可能扭结,这可能提供不准确的读数。压力感测内腔可以有利地适合于长停留时间,因为它们比MEMS传感器较不可能受到血液的影响。在一些示例中,可以使用相同类型或不同类型的多个压力传感器,例如以提供更准确的测量(例如,通过取测量的平均值或加权平均值)。
通过在神经刺激期间测量右心室收缩性来测量左心室收缩性的准确性可用于监测治疗功效。通过在神经刺激期间测量右心室收缩性来测量左心室收缩性的准确性可用于监测治疗功效。在一些示例中,在从右心室收缩性的测量相关之后,左心室收缩性可以用于闭环控制(例如,神经刺激参数调整、接通和/或关断神经刺激等)。
在一些示例中,可以出于安全目的监测诸如右心室压力的压力。例如,右心室压力、相关的左心室压力和任选的其他测量例如右心房压力可以用作替代ECG信号用于确定心率和/或心律失常。如下所述,这样的变量在刺激期间通常可能是不可测量的。
对于另一个示例,可以使用压力来确定导管是否已经移动,例如从右心室移动到右心房或上腔静脉,或者从肺动脉移动到右心室。可以配置系统在确定移动时触发(例如,自动地)某些事件,例如停止刺激、使电极篮塌缩、释放锚固件等。
以与已经使用的刺激装置一体的方式(例如使用在刺激元件的近端的导管的一部分上的传感器)来监测治疗功效能够提供某些优点。例如,不具有用于放置传感器的单独程序能够减少操作时间。传感器优选地对刺激快速响应。传感器优选地提供有关何时接合目标神经的有用反馈。传感器优选地是非侵入性的或被结合到刺激导管中。
可以与收缩性和/或松弛性和/或神经结合相关以监测治疗结合(therapyengagement)的示例信号包括:收缩期时间间隔,诸如预射血期(从ECG上的QRS开始到LV最大dP/dt的时间);LV射血时间(从主动脉瓣打开到主动脉瓣关闭的时间);和/或收缩压和/或平均动脉压(例如,由收缩压升高驱动)。通过本文所述的某些刺激疗法,收缩时间间隔能够减少和/或收缩压能够增加。有多种方法来测量这些信号中的每个信号。例如,通过评估S1到S2间隔的持续时间,使用动脉压并且使用降中峡(dichrotic notch)作为界标测量从主动脉瓣打开到瓣膜关闭的时间、使用从LV最大dP/dt所在的时间到LV最小dP/dt所在的时间的LV压力波形、和/或使用心音,能够估算LV射血时间。可以无创地测量收缩压,无创包括间歇地使用血压压脉带或连续地使用手指压脉带或眼压计来监测所估算的周缘动脉压(例如收缩压、平均压力、脉压)的变化。在一些示例中,例如,如果左侧压力或其他测量值不可用和/或不与左侧评估结合,则可以使用右侧的收缩时间间隔的变化和/或压力变化(例如,使用RV压力信号)来评估神经结合的状态。另一种可能对监测神经结合有用的测量可以包括右心室的最大压力变化率(最大dP/dt),其类似于LV最大dP/dt,但是使用右心室(RV)压力。神经结合信号的另一个示例是dP/dt信号的变化率(d2P/dt2,压力信号的二阶时间导数),该变化率可以在刺激开始期间(例如,从刺激开始的时间至最大dP/dt平稳期的时间,该时间能够在20到30秒的范围内,但是可以考虑其他时间范围进行分析)计算出。在某些这样的示例中,刺激振幅的增加可能会增加该变化率测量值,以表明dP/dt以更快的速率增加。如果变化率测量值未能随刺激振幅的变化而变化到某个阈值以上,则可能是神经没有被刺激疗法所结合。神经接合的另一种测量可以包括根据右侧或左侧压力信号(例如,RV压力)的脉冲轮廓来估算每搏输出量和/或心输出量。可以通过估计瓣膜打开和瓣膜关闭之间的压力曲线下的面积(减去瓣膜打开时的压力)来估算每搏输出量。将估算的每搏输出量乘以心率能够提供心输出量的估计。利用本文所述的某些刺激疗法,可以预期每搏输出量或心输出量的增加,并且每搏输出量或心输出量的增加可以指示神经结合。可以使用超声(例如,多普勒超声心动图)来监测肺动脉中血流速度的变化,例如通过无创地和/或经由导管传感器来监测经过某个部位的流量(例如,使用速度时间积分并乘以该部位(例如肺动脉)的横截面积)。可以使用一个或多个反馈信号来确定在治疗传送(therapy delivery)期间神经是否被接合。
对监测神经结合有用的若干参数可以随时间变化,并且随不同因素而变化,这些因素诸如为心脏负荷状况、受试者自主神经状态(例如白大褂综合症)、其他生理状况(例如右臂与左臂的压力变化不同)等。例如,如本文中所述的,定期或间歇监测可以考虑这样的变化。
对于给定的一组刺激参数和电极配置,LV最大dP/dt的增加能够在刺激开始的几秒钟内发生,平均在20至30秒内达到平稳期。在刺激关断之后,LV最大dP/dt缓慢地返回到刺激前基线或非刺激基线(在治疗持续时间之后其可能会高于刺激前基线),例如在关闭刺激之后3至5分钟内返回到刺激前基线或非刺激基线。
可以使用若干种方法来测试神经结合。在一个示例中,当受试者处于稳定状态时(例如,在晚上或在睡眠中每天一次、每天间歇地以规定的时间间隔等),可以间歇地将刺激关断或降低至亚阈值水平。在若干分钟之后可以衰减到基线,以检测刺激是否与神经接合,和/或可以使用阈值,以便在信号达到阈值水平时确定接合。重新打开刺激并看到信号在有利方向上变化,将进一步确认刺激是否与神经接合。可以使用刺激参数变化的组合以在对每个参数测试给定的持续时间下(例如,高于刺激水平、低于治疗刺激水平和/或低于阈值水平)测试神经接合和/或可以关断刺激。刺激参数可以是刺激振幅,但是也可以包括刺激脉冲宽度、频率、占空比等。可以在导管实验室(例如,在导管传送过程中)对神经接合信号进行校准,以例如通过利用LV最大dP/dt的变化来评估信号的变化,评估刺激参数的变化可以如何影响神经结合信号。该校准阶段可以用于确定用于输入到算法中的神经结合检测的阈值,该阈值可以用于在病房中评估神经是否结合。该信号可用于间歇性地监测导管移动。该信号可以用于评估治疗是否可能被滴定(例如,如果神经仍处于结合状态)或移动是否较大(例如,足以使神经未处于结合状态)以便可以使用成像或一些其他技术来评估导管位置以帮助确定动作(例如,选择待被激活的不同电极),或者导管移动太大而无法重新编程(例如,如果不移动导管,则无法接合神经)。
在另一示例中,可以将刺激参数(例如,振幅、脉冲宽度等)转到较低的设置和/或较高的设置,以识别反馈信号的变化。这样,相对于受试者的治疗水平,刺激治疗不会被中断,只会被减少或增加。例如,与关闭刺激相反的是,改变参数可以有利地避免几分钟的等待时间,该等待时间可能与监测对基线的衰减有关。与短时稳态类型的设置中的参数变化的变化相关的反馈信号在适当方向上的变化可以用作神经接合的指标,特别是因为这种类型的变化可以是非生理性的。可以重复进行这种测试以进行确认,并且可以由临床医生手动触发这种测试,或者这种测试可以被自动编程为以以特定的时间间隔进行。可以使用刺激器或通过编程接口来执行和/或编程该动作。刺激器用户界面和/或刺激器面板可以通过显示神经接合状态(例如,接合或未接合)和/或显示神经信号来指示神经是否接合。
图47A简略地示出了示例性心电图(ECG或EKG)。ECG包括P波,Q波,R波,S波和T波,它们表示在健康患者的单次心跳期间的不同事件。P波表示心房去极化,其导致左侧心房和右心房分别将血液推入左心室和右心室。直到Q波的平坦期,“PR段”和P波开始到Q波的开始是“PR间隔”。Q波、R波和S波,一起为“QRS复合波”,表示心室去极化,其导致右心室将血液推入肺动脉并朝向肺部,并且导致左心室将血液推入心房以分配到身体。T波表示左心室和右心室的复极化。直到T波的平坦期是“ST段”,在此期间心室去极化,并且共同地QRS复合波、ST段和T波是“QT间隔”。有些心电图在T波后也有U波。各种波、段、间隔和复合波的定时、幅度、相对振幅等可用于诊断心脏的各种状况。来自本文描述的系统的电刺激可能干扰正常ECG。在一些示例中,可以修改ECG信号以考虑这样的干扰。
在一些示例中,可以由系统监测ECG,使得仅在例如T波和P波之间的时段、S波和P波之间的时段、S波和Q波之间的时段等期间施加刺激。ECG可以在刺激期间人为地变成平坦线,但在非刺激期间不受影响。一些用户可能更喜欢看到平坦线或“空白”时段而不是噪声、人造信号等。在一些示例中,ECG可以是人造地高或低的平坦线,或者在刺激期间显示不规则图案,使得ECG的用户识别出在这些时段期间的信号不准确。图47B是修改的心电图的示例。在S波和T波之间的时段发生的刺激期间,ECG是人为地低。
图47C是监测的心电图的示例。如上所述,刺激被定时到心跳。不是依靠心跳,包括心跳内持续时间,其保持规则,在心跳之间的一部分时间施加刺激,然后,对于下一次心跳监测ECG。例如,在S波(在图47C中用“S”表示)之后的短时段内施加刺激,然后是P波应该开始或完成的监测时段(在图47C中用“M”表示)。如果检测到P波,则重复刺激和监测。如果在监测时段未检测到P波,这可能指示出现了问题,则可以停止刺激。在确定条件适合于刺激之后,用户可以重新开始刺激。在失常之后的一定数量的正常心跳之后,系统可以自动重新开始刺激。
在一些示例中,例如其中刺激系统具有低占空比(诸如1秒接通和5秒关断、5秒接通和10秒关断等)的示例中,ECG可以在刺激时段期间停止并用替代的读数替换。
图47D是修改的心电图的示例。在刺激期间,整个心电图变成平坦线。在一些示例中,ECG可以是人造地高或低的平坦线,使得ECG的用户识别出在这些时段期间的信号是不准确的。
图47E是修改的心电图的另一个示例。在刺激期间,其持续时间是预先已知的,来自刺激之前的时段的心电图被复制并在刺激期间再次呈现为ECG。图47F是修改的心电图的另一示例。在刺激期间,例如基于诸如压力、完美ECG等其他患者数据的人造ECG被呈现为刺激期间的ECG。在一些示例中,基于压力数据,ECG的人造部分可以包括或者基本上由指示左心室收缩的R波组成。图47E和47F的修改的ECG可以允许与其他机器集成,例如,如果ECG与正常ECG不同,则该其他机器可以发出警报或功能不正常。
图47G是修改的心电图的另一示例。在刺激期间,已知通过可视化来人造的人造ECG。例如,不是具有峰的波,而是可以将波表示为方波。图47G的修改的ECG可以允许与其他机器集成,例如,如果ECG与正常ECG不同,则该其他机器可以发出警报或功能不正常,和/或可以可视化并且可以清楚地知道不表示实际ECG数据。
在一些示例中,可以滤除刺激对ECG的影响以在刺激期间呈现真实的ECG。
本文描述了用于导管系统的某些安全系统,例如塌缩到缩回状态。在一些示例中,可以监测参数,并且可以响应于监测的参数超过阈值来引发某些事件。
在一些示例中,所监测的参数包括来自配置成在肺动脉中的压力传感器的压力。偏离肺动脉压力的压力可指示导管已向后滑动使得电极可能在右心室中。可以引发的包括停止刺激、使可扩张构件塌缩和/或发出警报。在一些示例中,可以监测右心室压力以确认偏离压力示出右心室压力。传感器位置和血管压力的其他组合,例如,在下游腔和上游腔之间也是可能的。例如,右肺动脉到肺动脉,左肺动脉到肺动脉,肺动脉到右心室,右心室到右心房,右心房到上腔静脉,右心房至下腔静脉,上腔静脉至左头臂静脉,上腔静脉至右头臂静脉,左头臂静脉至左颈内静脉,右头臂静脉至右颈内静脉,其组合等。
在一些示例中,所监测的参数包括来自移动传感器的移动。压力传感器可包括例如电容传感器,磁传感器,接触开关,其组合等。在一些示例中,移动传感器定位在入口点(例如,左颈内静脉)。大于一定距离(例如,大于约0.5cm,大于约1cm,或大于约2cm)的移动可触发引发事件,包括停止刺激、塌缩可扩张构件和/或发出警报。在一些示例中,沿着系统纵向间隔开的多个移动传感器可用于验证检测到的移动。
在一些示例中,所监测的参数包括心率。如本文所述,压力波形可用于监测刺激期间的心率。在刺激期间监测心率的其他方法也是可能的。如果心率改变一定量或百分比,则可能引发的事件包括停止刺激、塌缩可扩张构件和/或发出警报。
在一些示例中,所监测的参数包括电极阻抗。如果电极被配置为压靠血管壁,或者与血管壁隔开一段距离,则该配置导致阻抗。如果阻抗改变一定量或者百分比,可以引发的事件包括停止刺激、使可扩张构件塌缩、使用未使用的电极和/或发出警报。
图47Hi示意性地示出了用于从ECG中消隐神经刺激的示例系统。如本文所讨论的,对受试者4702施加神经刺激能够影响受试者4702的ECG读数。一种解决方案是在神经刺激期间例如使用图47Hi的系统消隐ECG读数。受试者4702照常连接至ECG系统4704,以测量心跳的速率和节律。有时,在ECG显示器4710上提供感测到的信息之前,可以使用ECG放大器4708放大来自ECG系统4704的信号。图47Hi中所示的系统包括在ECG系统和ECG放大器之间的ECG消隐器4706。ECG消隐器4706被配置为在将来自ECG系统4704的数据发送到ECG放大器4708之前捕获和操纵该数据。受试者4702还连接至神经刺激系统4712,例如如本文所述的包括电极结构等的神经刺激系统。也可以是包括用于其他指示的其他神经刺激系统。在一些示例中,神经刺激系统4712可以包括ECG消隐器4706。ECG消隐器4706能够抑制或防止神经刺激波形和/或神经刺激对ECG信号的影响破坏ECG信号。
在一些示例中,当神经刺激系统4712正在施加神经刺激时,ECG消隐器(blanker)4706能够从神经刺激系统4712接收信号。该信号还能够断开ECG消隐器4706的电路,以中断ECG系统4704和ECG放大器4708之间的信号。当ECG放大器4708在神经刺激过程中未接收到信号时,ECG显示器4710可能为空白的。当不施加神经刺激时停止发送信号能够重新闭合ECG系统4704和ECG放大器4708之间的电路。在一些示例中,神经刺激系统4712能够向ECG消隐器4706发送单独的信号以产生类似的效果。ECG消隐器4706可以包括例如消隐电路、比较器、继电器、其组合等。
在一些示例中,ECG消隐器4706使用确定性定时来预测何时将发生心跳,并且指示神经调制系统4712在那些时间窗口期间不施加神经刺激,例如,因此当用户期望看到心跳时,ECG信号不会被消隐。在神经刺激期间,至ECG放大器4708的信号被消隐(例如,至少在双相波形期间),这抑制或防止了高能量刺激噪声使ECG放大器4708饱和。在刺激脉冲期间,ECG信号可以保持在恒定电压下。对于复杂的心跳(例如,过早的心室收缩(PVC)、二联等),可以使用附加消隐和/或其他ECG信号操纵。
图47Hii示意性地示出了修改ECG波形的示例方法。在第一持续时间期间,检测或监测ECG的R波。测量所检测的ECG的R到R间隔4720(图47Hii)。计算R到R间隔的加权总和平均值。在一些示例中,可以排除完全不在加权总和范围内的心跳,例如,因为它们可能表示PVC、脱漏搏动等。
可以使用加权总和平均值来估计下一心跳的时间窗口。在启动模式下或如果无法建立稳定的R-R间隔,则神经刺激占空比可能会下降(例如降至20%)。预测窗口定时能够基于心率而动态化。例如,较快的速率可以用于较小的窗口和/或较慢的速率可以用于较宽的窗口。
当预期心跳时,在估计的窗口期间神经刺激被消隐。在一些示例中,在预期的T波和预期的P波之间施加神经刺激(例如,如图47Hiii中所示)。在一些示例中,在预期的T波和预期的Q波之间施加神经刺激。在一些示例中,在预期的S波和预期的Q波之间施加神经刺激。在一些示例中,在预期的S波和预期的P波之间施加神经刺激。消隐神经刺激能够在预期心跳时的时间抑制或防止ECG放大器输入的消隐。可以稍微调制神经刺激的速率,以将刺激脉冲移至预期的心跳窗口之外。可以跳过多个刺激脉冲以避免预期的心跳窗口。
在一些示例中,ECG放大器4708具有输入消隐电路,该输入消隐电路由神经刺激信号(例如,来自ECG消隐器4706或直接来自神经刺激系统4712)控制。在主动神经刺激期间(例如,具有双相波形),ECG放大器4708输入被消隐。输入电位可以在消隐期间进行采样并保持。因此,ECG放大器4708不受神经刺激信号的干扰。
图47Hiii示意性地示出了示例ECG波形,该ECG波形没有通过施加神经刺激而破坏。通过施加神经刺激(例如不消隐神经刺激)而破坏的波形可能不适合装置和/或人员使用以诊断受试者的问题、错误地触发警报或引起其他问题。如上所述的,图47Hiii示出了示例测量的R至R间隔4720。使用本文所述的方法和系统,例如,在T波4722和P波4724之间施加神经刺激。反而言之,在T波4722和P波4724之间的持续时间期间,神经刺激未被消隐并且被允许发生。在虚线圆4726、4728中示出了两个示例双相神经刺激信号。例如,如果T波4722和P波4724之间的持续时间为1秒,则包括两个周期的虚线圆4726将大约为120Hz,并且包括四个周期的虚线圆4728将大约为240Hz。这些是示意性的图示,并且应当理解,刺激波(形状、脉冲宽度、频率、振幅等)能够变化。
在一些示例中,因为到下一个R波的时间是已知的,因此可以使用时间(例如,以毫秒计)或R-R间隔的百分比来设置消隐时段。例如,如果R-R间隔是一秒,则可以允许在R波之后进行300毫秒的刺激,然后在R波之后的700毫秒之后,在下一个预期的R波之前的约300毫秒之后刺激被消隐。又例如,可以允许在R波之后进行R-R间隔的30%的刺激,然后在R波之后的R-R间隔的70%之后,在下一个预期的R波之前的R-R间隔的约30%之后刺激被消隐。这些时间和百分比仅出于示例目的,并且实际使用的时间和百分比能够基于统计分析、经验、T波期间刺激的耐受性、P波期间刺激的耐受性、工作周期、对收缩性和/或松弛性的影响、其组合和/或其他因素。
如本文所述的(例如,T至Q、S至Q、S至P等),在R-R间隔的其他部分期间可以允许神经刺激发生或不消隐神经刺激。在一些示例中,在预期的P波和预期的T波之间、在预期的P波和预期的S波之间、在预期的Q波和预期的T波之间、和/或在预期的Q波和预期的S波之间,神经刺激被消隐。在一些示例中,可以允许至少部分地重叠P波或T波的神经刺激。
图47I示意性地示出了用于从ECG信号中滤除噪声的示例系统。该系统包括在ECG导联4730和ECG系统4704之间的滤波器组件4732。在一些示例中,神经刺激系统4712包括滤波器组件4732。
图47J示意性地示出了示例滤波器组件4732。滤波器组件4732包括ECG导联输入4733、可选的模数转换器4734、滤波器4735、可选的数模转换器4736和至ECG的输出4737。ECG导联输入4733被配置为接受来自ECG导联的输入(例如,3导联ECG、5导联ECG、12导联ECG或其他导联ECG)。不是将ECG导联插入ECG系统中,而是将ECG导联4730插入滤波器组件4732中。来自ECG导联的模拟信号由模数转换器4734接收。模数转换器4734将来自ECG导联的模拟信号转换为数字信号。来自模数转换器4734的数字信号由数字滤波器4735接收。滤波器4735可以包括数字滤波器,例如陷波滤波器、低通滤波器、带阻滤波器、有限冲激响应(FIR滤波器、数字信号处理器等。滤波器4735可以被配置为以特定频率对数字信号进行滤波。滤波器4735可以被调节为不同的频率。在一些示例中,滤波器组件4732与神经调制系统4712连通,并且神经调制系统4712设置滤波器频率。在一些示例中,滤波器组件4732包括用于手动或电子设置滤波器频率的输入。由数模转换器4736接收来自滤波器4735的滤波后的数字信号。数模转换器4736将来自数字滤波器4735的滤波后的数字信号转换为模拟信号。来自数模转换器4736的模拟信号被至ECG的输出4737接收。至ECG的输出4737可以包括模仿(mimicking)ECG导联的丝线。由ECG系统4704接收来自至ECG的输出4737的模拟信号,该ECG系统不会区分直接来自ECG导联的模拟信号和来自至ECG的输出4737的模拟信号。在某些示例中,可以省略模数转换器4734和数模转换器4736,并且滤波器4735可以包括模拟滤波器。在一些示例中,一件硬件可以包括模数转换器4734和数模转换器4736两者。在一些示例中,可以使用附加的硬件来修改信号以使其更适合于ECG系统4704。
图47Ki至47Kvii示意性地示出了从ECG信号中滤除噪声的示例影响。滤波器4735是单个数字低通滤波器,并且图47Ki至47Kvii示出了在神经刺激之前和神经刺激期间将滤波器4735设置在不同频率下的效果。例如,根据本文描述的示例,以20Hz的频率的刺激在线4740处开始。
图47Ki示出了使用具有设置为100Hz的截止频率的低通数字滤波器4735对ECG信号的影响。在刺激之前,ECG信号不受影响。在刺激开始之后,ECG信号显示出明显的噪声,并且数字滤波器4735的影响很小。100Hz滤波器确实清除(clean up)了ECG信号的S-T部段上的噪声。图47Kii绘制了在频谱上设置在100Hz处的滤波器4735的影响。20Hz的刺激频率会在20Hz处产生较大的峰值,而在40Hz处产生较小的峰值。还保持了来自ECG导联的峰值(例如,在约1Hz至约10Hz之间)。在一些示例中,在大于100Hz处的刺激可能对ECG信号影响很小,例如,这是因为ECG系统可以包括设置为小于100Hz的频率的高通滤波器。
图47Kiii示出了使用具有设置在30Hz处的截止频率的低通数字滤波器4735对ECG信号的影响。在刺激之前,ECG信号不受影响。在刺激开始之后,ECG信号显示一些噪声,并且数字滤波器4735显著衰减由刺激引起的噪声。例如,能够检测到R波峰值,而S-T部段是干净的(基本上没有噪声)。
图47Kiv示出了使用具有设置在20Hz处的截止频率的低通数字滤波器4735对ECG信号的影响。在刺激之前,ECG信号不受影响。在刺激开始之后,ECG信号显示一些噪声,并且数字滤波器4735显著衰减了由刺激引起的噪声,其衰减超过了图47Kiii中所示的在30Hz处的噪声。如下所示,将滤波器频率与刺激频率匹配不一定会产生最佳的ECG信号降噪效果。
图47Kv示出了使用具有设置在15Hz处的截止频率的低通数字滤波器4735对ECG信号的影响。在刺激之前,ECG信号不受影响。在刺激开始之后,ECG信号显示一些噪声,并且数字滤波器4735显著衰减了由刺激引起的噪声,其衰减超过了图47Kiv中所示的在20Hz处的噪声。
图47Kvi示出了使用具有设置在10Hz处的截止频率的低通数字滤波器4735对ECG信号的影响。在刺激之前,ECG信号不受影响。在刺激开始之后,ECG信号显示了很小的噪声,并且数字滤波器4735显著衰减了由刺激引起的噪声,其衰减超过了在图47Kv中所示的在15Hz处的噪声。实际上,刺激之前和之后的ECG信号看起来是相同的。图47Kvii绘制了在频谱上设置在10Hz处的滤波器4735的影响。即使在20Hz的刺激频率下也没有峰值。来自ECG导联的峰值(例如,在约1Hz至约10Hz之间,但包括一些达至约40Hz的频率)被减小但保持不变。在不受任何特定理论的束缚的情况下,认为对于10Hz滤波器的滤波器拐点或-3dB点位于干扰在20Hz刺激频率处衰减所在的点。如果将滤波器设置在低于10Hz(例如5Hz)的频率下,则滤波器可以去除用于ECG的数据(例如,在1Hz至10Hz之间),而与10Hz相比益处很小或没有益处。在一些示例中,例如,通过增加拐点的斜率、-3dB点并降低截止频率,一系列频率高于10Hz的低通滤波器可以实现类似的效果。
例如如图47Kvi中所示,从ECG信号中滤除噪声能够提供一个或多个优点。ECG显示器能够是干净的,基本上没有刺激引起的噪声,以供用户读取。心律失常检测能够完全正常运行,而不会产生误报或漏检。起搏伪影检测能够在没有错误检测的情况下运行。对于包括滤波器设置的ECG系统,设置不会更改,但会更改所使用的滤波器。
在一些示例中,滤波器4735可以包括陷波滤波器,例如被设置或调整为匹配刺激频率。陷波滤波器可以提供与低通滤波器类似的优点,并且不会在较高频率下影响ECG信号。如果已知或预期某些其他频率会受到神经刺激的影响(例如,刺激频率的倍数),则可以使用处于预期问题频率下的多个陷波滤波器。
图47L示意性地示出了用于使神经刺激频率与ECG监测频率匹配的示例系统。ECG系统4704通常以单一频率(例如,根据品牌、型号等,为50Hz或60Hz)操作。在本文所述的一些神经刺激系统中,频率范围可以在约2Hz至约40Hz之间(例如,约20Hz),以获得对左心室收缩性和/或松弛性的期望影响。神经刺激频率会干扰ECG系统4704(例如,产生损坏的ECG信号)。频率匹配的神经刺激系统4740被配置为以与ECG系统4704操作相同的频率施加神经刺激。在一些示例中,神经刺激频率4740耦合到ECG系统4704,并且能够检测操作频率。在一些示例中,神经刺激频率4740包括能够由用户控制的频率输入(例如,能够在ECG系统4704操作所在的预定数量的频率之间选择)。输入可以包括频率本身、品牌、型号、其组合等。如所讨论的,频率匹配的频率可能小于具有预期治疗效果的理想频率。鉴于频率可以修改其他刺激参数。例如,可以减小脉冲宽度,可以减小振幅,可以增加占空比,它们的组合和/或类似物。在一些示例中,频率可以是预定的而不是优化的,然后本文描述的系统和方法可以用于优化其他刺激参数。在一些示例中,可以修改刺激波形以提供相同的平均能量。
本文公开的导管系统可以根据任何合适的方法传送、部署、操作和从身体移除。图48A-48H示出了用于递送和部署导管系统4800的示例方法,导管系统4800包括包含电极4824的可扩张结构4820。导管系统4800可以与导管系统3700或本文公开的其他导管系统相同或相似。导管系统4800可以通过颈静脉传送到上腔静脉,右心房,右心室,通过肺瓣膜,并进入右肺动脉。
如图48A所示,注射器4813可以用于插入针4814以便最初进入颈静脉4815。然后可以通过针4814将导丝4816插入颈静脉4815中。如图48B所示,可以移除针4814,并且可以将导引器4830通过导丝4816插入颈静脉4815中,使得导引器4830跨越并保持进入颈静脉4815的开口。导引器可以包括例如来自爱尔兰Westmeath的Teleflex公司的11French 导引器,但是可以使用其他导引器。导引器可以包括柔性轴4831和止血阀4832。
导引器,但是可以使用其他导引器。导引器可以包括柔性轴4831和止血阀4832。
在将导引器4830插入颈静脉4815之后,可以将斯旺-甘兹氏导管4840浮动到右肺动脉4842,如图48C所示。斯旺-甘兹氏导管4840包括在其远端的可膨胀球囊4841。斯旺-甘兹氏导管4842可以通过导丝4816插入导引器4830中,并且一旦球囊4841在导引器4830远侧,球囊4841就可以被膨胀。膨胀球囊4841由天然血流携带,将斯旺-甘兹氏导管4840的远端尖端拉入右肺动脉4842。导丝4816可以通过斯旺-甘兹氏导管4840的导丝腔向远端推进,直到导丝4816的远端定位在右导肺动脉4842。一旦导丝4816就位,球囊4841就可以紧缩,并且可以将斯旺-甘兹氏导管4840向近端缩回到脉管系统之外。导管组件4800可以包括在其远端处具有球囊,使得可以省略将斯旺-甘兹氏导管4840和导丝4816。
导引器护套4833和扩张器4834可以通过导丝4816跟踪到肺动脉干或右肺动脉4842。当导引器护套4833就位时,可以撤回扩张器4834。导管系统4800可以通过导引器4830插入,通过导引器护套4833,并且通过导丝4816跟踪到导引器护套4833的远端。如果可扩张结构4820自扩张,则可扩张结构可以在导引器护套4833中处于径向压缩状态,并且处于从导引器护套4833出来的径向扩张状态。可扩张结构4820可以从导引器护套4833的远端脱出,这通过向远端推进可扩张结构、向近端缩回导引器护套4833和/或其组合。例如,如果引导器护套4833的远端在肺动脉干中,则可扩张结构4820可以向远端推进并且跟随导丝4816进入右肺动脉4842。图48D示出了在离开导引护套4833的远端之后处于径向扩张配置的可扩张结构4820。
导引器护套4833可以缩回到肺动脉瓣4847的近侧或远侧的位置。如果导管系统4800包括位于右心室4849中的压力传感器,则导引器护套4833的远端可以缩回到压力传感器近侧的位置,并且因此在肺动脉瓣4847近侧,以将压力传感器暴露于右心室。导引器护套4833可以缩回到肺动脉4847远侧的位置,使得可扩张构件4820的近侧缩回使得可扩张构件4820被引导器护套4833径向压缩,并且扩张的可扩张构件4820不能越过肺动脉瓣4847。如果引导器护套4833是可分割的,则引导器4830可以完全从身体缩回并通过沿其圆周分割而从导管轴组件4806移除。
图48D-48E示出了位于右肺动脉4842内的可扩张结构4820。在图48D中,在离开导引护套4833的远端之后处于自扩张状态。在图48E中,可扩张结构4820例如由于致动管的缩回处于进一步扩张的状态。如图48D-48E所示,在导管系统3800从肺动脉主干过渡到右肺动脉4842中时,柔性管和/或导管轴组件4806的铰接件的硬度可以允许紧密屈曲(约90度)。导管轴组件4806可以抵靠肺动脉干的左侧牢固地定位。在进一步扩张时,例如比处于最大收缩状态的右肺动脉4842的直径大2毫米,可扩张结构4820被锚固。神经调节过程可以进行数天,因此通过锚固在右肺动脉4842中保持可扩张结构4820的位置可以在手术的持续时间内提供一致性。
导管4830可以可选地在手术期间相对于患者固定,以抑制或防止导管系统4800的无意重新定位。图48F示出已插入导引器1830的导管组件4800的手柄4810的示例。硅胶套管可以放置在导引器4830上并缝合到患者体外的表面和/或直接缝合到患者身上。在一些示例中,导引器4830长约65cm并且导管轴组件4806大约100cm长,留下大约35cm的颈部4835。在引导器护套4833部分缩回之后,例如在肺动脉瓣4847的近侧,颈部4835可以减小到大约15到20cm。导引器阀4832可以在导管系统4800的导引器4830和导管轴组件4806之间形成牢固连接,使得导管系统4800不容易相对于导引器4830移动。硅胶套管可以可选地沿着颈部4835放置在致动轴组件4806上方以保持期望的间距。如果电极4824移出适当的刺激位置,则可以通过测量的心脏收缩性和/或松弛性的变化来检测可扩张结构4820的无意脱位。
可扩张结构4820的电极阵列4829可以朝向右肺动脉4842的上部和后部定位,用于刺激一个或多个心肺神经。可以使用荧光检查来可视化导管系统4800(包括可扩张结构4820)的定位,以确保实现正确的取向,尤其是与电极阵列4829的周向取向有关。可以在有或没有造影剂的情况下进行荧光检查。图48G示出了插入右肺动脉4842的导管系统4800的荧光检查图像。在不使用造影剂的情况下可以看到可扩张结构4820的阵列4829。结合导管上的位置传感器的导航引导系统(例如,来自St.Jude Medical Inc的NavXTM)和/或对心脏表面的电生理学进行测绘的心脏测绘系统可以与荧光检查结合使用或者作为荧光检查的替代使用。可以在荧光检查之前或与荧光检查同时地执行附加于荧光检查执行的测绘。可以使用压力传感器或其他装置来跟踪导管系统的部件的位置,这可以减少或消除荧光检查的使用。
图48H示意性地描绘了用于刺激目标神经4843的单个样条上的所有电极4824的激活,但是实际刺激方案可包括少至两个电极4824,包括在不同样条上的电极4824等。目标神经4843可以是心肺神经。在一些示例中,可以激活位于目标神经4843两侧的两个电极4824。在一些示例中,可以在通过“电移动”导管系统4800在定位可扩张结构4820之后识别目标神经4843,其中,导管系统4800和可扩张结构4820未物理地重新定位,但是电极阵列4829内的“有效”电极4824的选择在阵列4829上移动或以其他方式改变以更好地捕获目标神经4843。电极阵列4829可以定位成使得神经位于两个或更多个电极之间(例如,在两个电极之间,三个电极之间,四个电极之间等)。
在一些示例中,可以紧接在刺激脉冲之前将电压预脉冲施加到目标神经4843周围的组织。预脉冲可以使附近组织预极化并使其更容易刺激目标神经4843同时避免刺激附近的疼痛神经。例如,刺激方案可以包括具有第一极性(例如,正极性或阳极极性)的较小振幅脉冲,其被配置为使组织预极化,然后立即或几乎立即跟随第二极性例如,负或阴极)的较大振幅脉冲,其被配置为刺激目标神经4843。第二极性可以与第一极性相同或相反。预脉冲可以由电极阵列4829的相同或不同的电极4824施加。
在一些使用示例中,首先通过快速滴定识别在刺激过程中使用的有效电极。在快速滴定期间,可以使患者镇静以避免疼痛,使得电极4824可以选择性地以全功率激活以确定哪个或哪些电极4824最佳地捕获目标神经4843。在快速滴定之后,可以用较低功率激活所选择的有效电极4824并增加功率以确定用于刺激目标神经4843的最佳功率设置,在此期间患者不需要镇静。
刺激参数滴定的效果(包括例如刺激振幅、脉冲宽度和/或频率的变化的效果)可能对实现期望的响应有用。在短持续时间的刺激之后(例如1至2分钟),LV最大+dP/dt在近似5分钟之后可以从峰值平稳值衰减到基线。由于编程刺激可以基于试错过程(这可能是相当耗时的),因此基于反馈信号(例如,心率和/或收缩性和/或松弛性措施)使过程自动化将是有利的。在一些示例中,一旦已经识别出产生收缩性和/或松弛性增加的电极或电极组合,就设立自动刺激参数滴定。在一些示例中,可能尚未识别出响应电极。例如如本文所述,基于例如收缩性和/或松弛性和心脏信号,可以使用循环通过作为阳极、阴极或不带电的电极的自动化系统来识别响应性电极或组合。一旦选择了电极组合(阴极/阳极),就可以设立刺激滴定。
作为第一示例,刺激以诸如20mA的振幅、4ms的脉冲宽度和20Hz的频率的预定设置开始,并且使用单个刺激参数来滴定效果。可滴定的刺激参数可以包括但不限于振幅、脉冲宽度或频率。由用户设置心率或心率和/或收缩性和/或松弛性的阈值(或收缩性和/或松弛性的替代度量,诸如压力)以滴定效果。与基线水平相比的绝对变化或相对变化可以用于滴定效果。如果观察到收缩性和/或松弛性的增加而心率增加最小或没有增加,则刺激参数(例如,振幅)增加,直到观察到副作用或心率不期望的增加。然后减小刺激参数(例如,振幅),直到不再观察到不期望的心率。
作为第二示例,刺激以诸如20mA的振幅、4ms的脉冲宽度和20Hz的频率的预定设置开始,并且使用多个刺激参数来滴定效果。可滴定的刺激参数可以包括但不限于振幅、脉冲宽度或频率。由用户设置心率或心率和/或收缩性和/或松弛性的阈值(或收缩性和/或松弛性的替代度量,诸如压力)以滴定效果。与基线水平相比的绝对变化或相对变化可以用于滴定效果。如果观察到收缩性和/或松弛性的增加而心率增加最小或没有增加,则增加多个刺激参数(例如,振幅和脉冲宽度)中的每一个,直到观察到副作用或心率不期望的增加。然后减小刺激参数(例如,振幅和脉冲宽度),直到不再观察到不期望的心率。
可以调节刺激的频率以增加或最大化刺激响应和/或以维持刺激响应。例如,可以增加频率(例如,从20Hz增加到40Hz)以增加心脏收缩性和/或松弛性和/或以更快地实现心脏收缩性和/或松弛性平稳期。以更高频率刺激交感神经可能会导致神经递质的额外释放,因为更多的刺激脉冲正被传递到神经末梢,以相应于增加心脏收缩性和/或松弛性信号传递神经递质的释放。在一些示例中,增加刺激频率可以通过减少识别刺激响应所花费的时间量而允许更有效的方式来搜索适当的电极(例如,阴极)以用于刺激。这可能涉及以比用于其余患者治疗更高的频率开始初始编程会话(programming session)。在某些情况下,治疗可能会使用较高的频率(例如20Hz)来识别收缩性和/或松弛性(或其他措施)是否正朝着有利的方向变化,和/或如果使用刺激来维持治疗则治疗可以使用较低的频率(例如10Hz)。减少刺激频率可以用作维持更有效的刺激治疗的方法。在一些示例中,增加刺激频率可以允许增加收缩性和/或松弛性响应的振幅的方式。
考虑了刺激的突发模式,在该模式中,以特定的占空比传递刺激的突发。在突发模式期间的刺激频率(突发内频率)可以在约100Hz至约800Hz之间(例如,约100Hz、约200Hz、约300Hz、约400Hz、约500Hz、约600Hz、约700Hz、约800Hz、在这些值之间的范围等)和/或突发频率(突发内频率)可以在约0.1Hz至约20Hz之间(例如,约0.1Hz、约0.5Hz、约1Hz、约2Hz、约5Hz、约10Hz、约15Hz、约20Hz、在这些值之间的范围等)。刺激的突发模式下的参数范围可以用于模拟心脏神经(例如,心脏交感神经)的生理活动。
可以使用自动化系统来设置用于刺激的占空比。例如,可以将初始的循环设置为特定的设置,例如打开5分钟和关闭1分钟。可以将占空比设置为但不限于在5秒至30分钟增量的范围内或达至1小时的增量。类似于刺激参数滴定,占空比可以变化以使得仅当收缩性和/或松弛性和心率在用户指定或观察到的期望范围内时才传递刺激。从效率的观点(例如,电池寿命、充电间隔)来看,在至基线的一部分衰减期间降低刺激或停止刺激可能是有利的。在一些示例中,刺激占空比可以是预先指定的。例如,可以停止刺激1分钟,然后再打开1分钟,以利用最大+dP/dt至基线的缓慢衰减并仍然保持治疗效果。在一些示例中,可以基于反馈信号(例如,LV最大+dP/dt)以及当刺激被关闭时反馈信号至基线的衰减来针对特定患者设置刺激占空比。将占空比包括到其中刺激被定期开启和关闭的刺激可能是有利的,例如以允许用户定期查看ECG,当刺激开启时,ECG能够包含刺激伪像。
可以设置刺激参数以增加(例如,最大化)期望的响应和/或减少(例如,最小化)传递的能量和/或不期望的响应。例如,可以使用频率来识别肺动脉中靠近心脏组织并且如果被刺激则可能导致不期望的响应(例如,心律不齐)的位置。在给定的振幅和脉冲宽度下以2Hz进行刺激可能会结合或激活心肌组织,并导致2Hz的心房激活(每分钟120次搏动)。可能期望避免引起这种响应的电极,或者可以减小振幅和/或脉冲宽度以避免心房的激活。用户或装置本身能够较快地识别出这种反应。能够在测试每个刺激电极之前或在编程会话开始时使用此心房捕获测试,以测试哪些电极可能靠近心肌组织。又例如,可以在同时激活自主神经纤维的情况下激活传递不期望的感觉(例如压力、疼痛等)的感觉或疼痛纤维。可以改变刺激向量以收紧刺激向量并减小阳极和阴极之间的距离,和/或以在阴极周围添加阳极从而收紧刺激场。可以减小刺激振幅和/或脉冲宽度,以避免单独或与改变刺激向量结合地激活不需要的神经纤维。
在初始一段时间可以滴定刺激或在急性或慢性环境下可以使用刺激来监测治疗和滴定治疗。可以设置心率和收缩性和/或松弛性措施的上限和下限阈值,以确保在所需界限内传递刺激。可以设置刺激参数的上限和下限,以使得不超过那些界限。刺激滴定可以定期或连续地进行,以确保刺激持续提供所期望的效果。
可以用于滴定、维持或测试该效果的收缩性和/或松弛性和/或治疗效果的其他度量可以包括LV压力、推导出的LV最大+dP/dt、右心室压力、推导出的RV最大+dP/dt、动脉血压、推导出的平均动脉压、肌肉交感神经活动(MSNA)、血浆去甲肾上腺素水平、心输出量(有创或无创测量)、肺动脉压、混合静脉血氧饱和度、中心静脉血氧饱和度、心肌耗氧量、肺动脉楔压、星状神经节神经活动或其他生理信号和/或其组合。心率的度量可以包括外部ECG(例如,诸如使用皮肤上的贴片电极在受试者外部记录的ECG)和/或内部ECG(例如,诸如在刺激装置上(例如,在装置上的电极)和/或在远程装置上在受试者内部记录的ECG)。
在猪模型中研究从锁骨下动脉对心脏交感神经进行血管内刺激的临床前工作表明,随着刺激振幅的增加,对左交感神经的刺激能够增加心脏的收缩性和/或松弛性。已经显示出左心室收缩压(LVP)通常随着刺激振幅的增加而大体上增加,特别是达至约30伏。相反,对于低刺激振幅、特别是小于约15伏的振幅,心率已显示出保持相对恒定,但随着刺激振幅增加心率会增加,然后对于较高刺激振幅、尤其是大于约30伏的刺激振幅,心率保持相对恒定。
电极选择可以基于系统滴定。对于给定的电极阵列,可能有数百万种组合或排列用于电极选择(例如,阳极或阴极、振幅、脉冲宽度、频率、刺激持续时间、占空比等)。用户界面能够帮助引导用户通过刺激参数空间的子集。
图56A示出了示例用户界面5600的屏幕。例如,可以在本文所述的计算装置5520的屏幕上示出用户界面5600。图56A显示了处于滴定模式时的屏幕,能够通过敲击用于滴定模式的图标5602来启用该模式。用于其他模式的图标包括用于新患者模式的图标5604(例如,以启动新的受试者或患者会话输入或导入有关该受试者的数据)、用于询问刺激器装置的图标5606、用于监测模式的图标5608(例如,用于监测受试者的重要数据,诸如ECG、血压等)、用于新阻抗模式的图标5610(例如,用于监测和/或计算阻抗数据、电阻数据等)、用于新设置模式的图标5612(例如,用于调整刺激器设置,诸如极性、阳极和/或阴极的电极选择、振幅、脉冲宽度、占空比、接通(ramp on)和/或断开(ramp off)持续时间、警报设置的限值等)、用于压力传感器模式的图标5614(例如,用于监测、校准、重置等压力传感器)、用于同步模式的图标5616(例如,用于在刺激器(例如,刺激系统5500)和计算装置(例如,计算装置5520)之间同步时间、用于数据模式的图标5618(例如,用于记录更改、用于访问存储的数据、导出和/或查看数据库、查看和/或导出事件日志等)、用于注释模式的图标5620(例如,用于输入诸如关于药物剂量、受试者移动、系统问题等的注释)、用于保存模式的图标5622(例如,用于将信息保存到磁盘和/或外部存储器)、用于治疗下降模式(therapy ramp downmode)的图标5624、用于重新发送模式的图标5626(例如,用于重置刺激器)、用于紧急关闭模式的图标5628(例如,用于立即停止所有刺激)、用于程序信息模式的图标5630(例如,用于查看系统软件形式、固件、硬件等)、用于实验室模式的图标5632(例如,用于查看刺激器设置、管理员级别设置等)、以及用于关闭模式的图标5634(例如,用于关闭用户界面5600)。屏幕可以包括如本文所描述的许多图标,但是更多、更少和/或替代的图标、功能、模式、序列等是可能的。图56A示出了诸如连接图标5636的可选信息(例如,指示计算装置与刺激系统之间的通用串行总线(USB)连接)。在一些示例中,用户界面被配置为存储受试者中的电极矩阵的图片或图片系列(例如,荧光镜、电影胶片、x射线等)。这样的数据可以向用户提供关于哪些电极开始测试的信息。可以至少部分地基于其来创建或修改包含一系列编程步骤的脚本(script)。在某些这样的示例中,用户可能能够使用包括电极的特定组合的步骤或测试开始滴定。
在如图56A所示的滴定模式下,屏幕可以显示电极矩阵的图示5638,例如20个电极的4×5矩阵。在一些示例中,刺激系统能够自动地提供电极矩阵图示5638。在一些示例中,可以手动创建电极矩阵图示5638。在一些示例中,用于测试或步骤的电极可以改变颜色,包括标记(例如,“阳极”、“阴极”、“A”(例如,如图56A所示)、“V”(例如,如图56A所示)、“+”、“-”等所示)。屏幕可以可选地显示曲线图5640(例如,心电图、右心室压力、肺动脉压力、左心室收缩性和/或松弛性(例如,与右心室中的测量相关)、心率)和/或关于受试者的实时参数5642(例如,右心室脉压、左心室收缩性和/或松弛性(例如,与右心室中的测量相关)、心率,活性电极阻抗)。用户界面5600可以提供用于选择和修改曲线图5640和/或参数5642的控件。屏幕可以可选地显示当时正在运行的测试或步骤的参数5644(例如,脉冲振幅、脉冲宽度、频率、持续时间等)。
仍在图56A的滴定模式下,该屏幕显示了下拉框5650,该下拉框5650可以包含各种程序。在图56A中,已选择程序“振幅测试”。设置图标5652可以用于调整程序的参数、创建新程序、删除程序(例如,具有适当的授权)等。图标5654能够用于运行所选择的程序。图标5654能够用于停止运行所选择的程序。图标5654可以包括例如带有或不带有“停止”标记的八边形红色按钮。图标5658能够用于调出屏幕5680,其将进一步详细描述。图标5660能够用于重置程序(例如,在受试者移动之后、每天一次等)。图标5662显示如果点击图标5666则将运行程序的哪个步骤或测试。图标5664、5668能够用于选择所选程序的其他步骤或测试(例如,图标5664反转一个步骤或测试,图标5668前进一个步骤或测试)。如所述的,能够点击图标5666以运行图标5662中所示的步骤或测试。在一些示例中,在运行测试或步骤之后,用户界面5600可以自动地前进至下一步骤或测试。在一些示例中,在运行测试或步骤之后,用户界面5600仍保留在该步骤或测试上,直到用户使用图标5664、5668更改该步骤或测试为止。在一些示例中,在被允许使用不同测试之前,通过使用图标5670、5672可以迫使用户决定测试是否能够被接受。
图56B示出了图56A的示例用户界面5600的另一个屏幕5680。如果按下图标5658(图56A),则屏幕5680能够打开。屏幕5680包括具有步骤或测试行的表格。图标5662显示出“振幅测试”程序中具有8个步骤或测试。如果需要,如果包含的步骤能够比在屏幕5600上看到的步骤更多,则能够提供滚动条。第一列提供从1到8的步骤或测试编号。第二列提供用于该测试或步骤的脉冲振幅。第三列提供用于该测试或步骤的脉冲宽度。第四列提供用于该测试或步骤的频率。第五列提供用于该测试或步骤的持续时间。第六列提供用于该测试或步骤的用作阳极的电极。第七列提供用于该测试或步骤的用作阴极的电极。例如,参照图56A中的图示5638,在第1行中,右下方的电极20或E20用作阴极,而电极20或E20直接上方的电极15或E15用作阳极。
如果已经运行测试或步骤,则屏幕5680可以提供关于测试或步骤的结果的信息。例如,第八列提供心率,第九列提供阻抗,第十列提供响应,第十一列提供压力变化。也可以显示更多结果、更少结果、替代结果或没有结果。在一些示例中,可以基于用户输入将行改变颜色,例如变为红色或绿色,以例如分别指示电极组合是否可能引起副作用和/或导致治疗响应。
再次参照图56A,可以按下图标5670以指示用户不喜欢或不认可该测试或步骤的结果。相反,可以按下图标5672以指示用户喜欢或认可该测试或步骤的结果。用户能够输入认可或不认可的原因。例如,下拉框5674可以由于一些原因(例如,关于副作用、治疗效果等)而自动增添数据。对于另一个示例,用户能够在框5676中手动输入评论。为了添加评论,用户可以点击图标5678。
可以使用预定义的脚本来定义可以用于测试哪个电极正在提供治疗效果的刺激参数(例如,阳极或阴极、振幅、脉冲宽度、频率、刺激持续时间、占空比等)。用户可以从第一组参数开始,然后是下一组参数,直到找到合适的治疗位置。在一些示例中,用户输入注释,该注释指示电极和参数组合是否具有治疗性、电极和参数组合是否引起轻度的副作用、电极和参数组合是否引起严重的副作用和/或电极和参数组合是否不应再次测试(例如,基于严重副作用、缺乏治疗响应或其他参数的指示自动选择,或通过手动选择)。可以用特定颜色标记电极或阴极,以识别哪些电极可能具有治疗性以及哪些其他电极可能引起不想要的副作用。一旦评估了第一组参数,用户就能够手动逐步执行脚本中的各个步骤(例如,刺激参数的集合)以继续测试阵列中的各个电极。以这种方式,用户不必设置电极和参数来评估由电极阵列覆盖的整个空间。相反,脚本会引导用户通过测试刺激过程,以识别哪些电极可能对治疗用途最有利。该程序可以自动循环通过这些步骤,或者用户可以指示测试的电极组合是否能够被接受并且指示能够评估脚本的下一步骤。输出可以例如包括一些或所有测试参数的对数和/或颜色编码的电极阵列,该颜色编码的电极阵列指示哪些电极可能对治疗有用并且哪些电极优选被避免。基于该输出,可以表明用于治疗的电极和刺激参数。
在治疗下降(Therapy Ramp Down)模式5624中,可以将刺激向下滴定到预定水平(例如,从高刺激振幅降低到低刺激振幅),以使得刺激不会突然停止。高刺激振幅可以是治疗振幅,而低刺激振幅可以设置为0V或0mA,或者阈值振幅(例如,使用反馈信号开始观察到期望的响应的振幅)。在一些示例中,反馈信号可以包括左心室最大+dP/dt,并且低振幅可以被设置在该信号刚开始从其基线水平增加的水平。可以设置计时器,以在开始治疗刺激之后触发治疗下降某个特定持续时间,诸如在30分钟到5天的范围中的时间帧之内的变化增量中的30分钟、1小时、24小时、3天等。可以将开始治疗下降的计时器设置为在刺激开始时开始和/或可以在任何给定时间手动启动。可以在监控器模式5608中显示触发治疗下降的倒计时和/或可以向用户提供指示治疗下降模式不久将要开始或正在开始的警报消息。可以将治疗下降的目标振幅设置在阈值振幅下或其他所需水平下。可以包括其他目标值。例如,刺激治疗的缓慢下降可能涉及振幅、脉冲宽度、速率和/或占空比的减小。在一些示例中,可以将治疗下降的持续时间设置为30分钟、1小时、24小时、3天或7天、或该范围内的各种持续时间。
电极4824可以以单极或双极(例如,防护双极)方式激活。单极刺激可以使用负极性或正极性并且包括使用返回导体。返回导体可以距离电极至少5mm。例如,返回导体可以附接到导管系统4800或配置为在右心室4849中的另一导管的一部分或与之成一体。对于另一示例,返回导体可以附接到导管系统4800或配置为在上腔静脉中的另一导管的一部分或与之成一体。对于又一个示例,返回导体可附接到导管系统4800或配置为在头臂静脉或无名静脉中的另一导管的一部分或与之成一体。从电极4824到头臂静脉的电流矢量可以远离心脏和气管中的至少一个,这可以减少副作用和/或增加患者耐受性。在某些这样的示例中,进入的颈静脉可以是左颈静脉。返回导体可以包括贴在皮肤上的贴片。
在完成手术后,可以根据任何合适的方法将导管系统4800从身体移除。可以释放导管系统4800的手柄4810的致动机构,使得可扩张结构4820可以处于自扩张但不进一步扩张的状态。然后,可扩张结构4820可以通过可扩张构件的近侧缩回、导引器护套4833的远侧推进或其组合进入导引器护套4833。导引器护套4833可以缩回与导管系统4800拖在一起地从身体缩回。可扩张结构4820可以通过导引器护套4833从身体缩回,然后可以缩回导引器护套4833。
可以例如通过测量心脏内的压力来监测神经刺激对心脏收缩性和/松弛性,特别是左心室的收缩性和/松弛性的有效性。压力可以通过压力传感器测量,例如流体填充柱、MEMS传感器或其他合适类型的压力传感器。压力传感器可以附接到导管系统4800或与导管系统4800集成,例如,沿着导管轴组件4806。如果压力传感器附接到导管系统4800或与导管系统4800集成,则传感器可以位于右心室中。右心室中的压力可以与左心室中的压力相关,使得左心室压力并且因此左心室收缩性和/松弛性可以充分接近。压力传感器可以替代地通过另一导管插入心脏,并可放置在右心室、左心室或其他合适的位置。在手术过程中,可以使用左心室压力来优化神经刺激对心脏收缩性和/松弛性的影响。在手术过程中心脏收缩性和/松弛性可以可测量地增加例如5-12%。单个导管可以包括多个传感器。例如,一个传感器可以如上配置,并且第二传感器可以配置成驻留在右肺动脉中。右肺动脉中的传感器可以提供楔压,这是用户已知来自斯旺-甘兹氏导管插入术的读数。右肺动脉中的传感器可用于安全性。例如,如果右肺动脉中的压力传感器迁移在肺动脉瓣下方,则可以关断刺激(例如,基于压力变化(例如,百分比变化或绝对变化)和/或压力的绝对值(例如,高于或低于某一压力)被检测时立即关断)以抑制或预防心律失常。
图49A是处于扩张状态下的示例性可扩张结构4900的透视图。例如如本文所述,致动机构的操作能够引起可扩张结构4900扩张和收缩。可扩张结构4900包括近端部分4901和远端部分4903。可扩张结构4900包括多个样条4908和多个可膨胀元件4904a、4904b。例如,如本文所述,样条4908可以类似于可扩张结构3620的样条3622或其任何变型。样条4908在近端部分4901和/或远端部分4903处的耦接可以类似于可扩张结构3620的样条3622或其任何变型的耦接,例如,如本文关于图37G至37J所述的。可扩张结构4908在可膨胀元件4904a、4904b的周向区域中可以缺乏、没有或不具有样条4908。可扩张结构4900可以用于在丝线上系统(over-the wire system)中或作为斯旺-甘兹氏系统的一部分。
可膨胀元件4904a、4904b可以包括例如球囊4904a1、4904a2、4904b1、4904b2,这些球囊能够经由单个共同的膨胀内腔膨胀(例如,与每个球囊4904a1、4904a2、4904b1、4904b2流体连通,这些球囊可以有利地提供均匀的膨胀)、多个共同的膨胀内腔(例如,与球囊4904a1、4904a2流体连通的第一膨胀内腔和与球囊4904b1、4904b2流体连通的第二膨胀内腔,这些膨胀内腔可以在可扩张结构的一侧上提供球囊的均匀膨胀)、或者单独膨胀内腔,单独膨胀内腔可以有利地提供对单独球囊的膨胀的完全控制。单独球囊可以具有顺应性的和/或不具有顺应性。当通过导管导航可扩张结构4900时,可膨胀元件4904a、4904b能够有利地提供顺应性。例如,球囊在紧缩时非常柔软,并且能够在急弯处导航。当膨胀时,球囊会变硬并会扩张以贴近大直径血管的侧壁。
可扩张结构4900的多个可膨胀元件4904a、4904b包括第一可膨胀元件4904a和第二可膨胀元件4904b。可膨胀元件4904a、4904b在周向上相对或间隔开约180°。其他周向间隔也是可行的(例如,约30°、约45°、约60°、约75°、约90°、约115°、约130°、约145°、约160°、约175°、在这些值之间的范围等)。可以例如在中点之间、在类似边缘之间以及如可以适合于构造可膨胀元件的其他方法来测量周向间距。可膨胀元件4904a包括第一球囊4904a1和第二球囊4904a2。第一球囊4904a1通常平行于第二球囊4904a2。可膨胀元件4904b包括第一球囊4904b1和第二球囊4904b2。第一球囊4904b1通常平行于第二球囊4904b2。可膨胀元件4904a、4904b可以包括更少的球囊(例如,一个球囊)或更多的球囊。附加地和/或替代平行地,球囊可以在纵向上对准、成角度、沿周向、其组合等。可膨胀元件4904a、4904b可以耦接至近端和远端毂。膨胀内腔可以延伸通过近端毂。可膨胀元件4904a、4904b可以被加衬或细分成较小的腔室,以在膨胀时控制形状和/或轮廓。例如,相对的侧面可以熔焊在一起以形成腔室或球囊。与整体式可膨胀元件相比,细分的腔室可以更好地顺应血管壁。
可膨胀元件4904a、4904b可以填充有盐水、造影剂或其他生物相容性流体。如果可膨胀元件4904a、4904b填充有造影剂,则可以在荧光检查下观察可扩张结构4900的位置和旋转取向。如果观察到可扩张结构4900的位置和/或旋转取向是不期望的,则可扩张结构4900可以收缩(例如,包括使可膨胀元件4904a、4904b紧缩)并重新定位。如果期望精确的旋转取向,则可膨胀元件4904a、4904b可以是不对称的。
可膨胀元件4904a、4904b可以包括电极4906a。电极4906a可以例如被印刷在球囊4904a1、4904a2、4904b1和/或4904b2上。在图49A中,仅球囊4904a2上的电极4906a可见。球囊4904a1、4904a2、4904b1、4904b2中的一些可以包括电极4906a,并且球囊4904a1、4904a2、4904b1、4904b2中的一些可以缺乏电极4906a。例如,可膨胀元件4904a的球囊4904a1、4904a2可以包括电极4906a,而可膨胀元件4904b的球囊4904b1、4904b2可不具有电极4906a。用于电极4906a的导体可以印刷在可膨胀元件4904a、4904b上、嵌入在可膨胀元件4904a、4904b的材料中、和/或延伸通过膨胀内腔。关于图23Ni至23Nvix描述了非限制性示例印刷过程,在这些图中,基板2301可以是可膨胀元件4904a、4904b的材料。图49A中所示的电极4906a沿着球囊4904a2在纵向上间隔开,但是其他布置也是可行的。附加地或替代定位在球囊上,电极4906a可以定位在可膨胀元件4904a、4904b的球囊之间。这种布置可以使电极4906a与血管壁间隔开,并允许血液流过电极4906a,例如,从而提供关于图23L描述的优点。
样条4908可以包括如本文所述的电极4906b,例如但不限于如关于可扩张结构3620的样条3622所描述的。图49A示出了可扩张结构4900,其中可膨胀元件4904a和/或4904b包括电极4906a,并且样条4908包括电极4906b。图49Ai是处于扩张状态下的示例可扩张结构4903的透视图。可扩张结构4903的样条4908不包括任何电极。可扩张结构4903的所有电极4906a都位于可膨胀元件4904a和/或4904b上。图49Aii是处于扩张状态下的示例可扩张结构4905的透视图。可扩张结构4903的可膨胀元件4904a、4904b不包括任何电极。可扩张结构4905的所有电极4906b都位于样条4908上。图49A的可扩张结构4900的所有样条4908都包括电极4906b。不管可膨胀元件4904a、4904b是否包括电极,样条4908中的一些样条可以包括电极4906b,并且样条4908中的一些样条可以缺乏电极4906b。例如,可扩张结构4905的包括电极4906b的样条4908在周向上位于可膨胀构件4904a的第一边缘4912和可膨胀构件4904b的第二边缘4913之间。例如,最靠近可膨胀构件4904a的样条4908可以包括电极4906b,而最靠近可膨胀构件4904b的样条4908可以缺乏电极4906b。
电极4906a和/或4906b可以形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按照本文所述的其他系统。在可扩张结构4900、4903、4905扩张时,电极矩阵的电极可以被选择性地激活,以测试神经捕获、校准和/或治疗,例如,如本文所述。
图49B是处于扩张状态下的示例可扩张结构4920的透视图。可扩张结构4920包括近端部分4921和远端部分4923。可扩张结构4920包括多个可膨胀元件4924a、4924b。可膨胀元件4924a、4924b可以在近端处耦接至导管4930(例如,耦接至导管4930的远端部分或远端)。可膨胀元件4924a、4924b可以在远端处耦接至管状构件4928。可扩张结构4920在可膨胀元件4924a、4924b的周向区域中可以缺乏样条或没有样条或不具有样条。管状构件4928可以至少部分地在导管4930的内腔中延伸。管状构件4928的远端部分可以在侧向上延伸到导管4930的侧面之外。管状构件4928可选地包括内腔、例如导丝内腔。管状构件4928可选地包括无创伤远端末端或鼻部,例如如远端部分4923中所示。管状构件4928可以用于向近端拉动远端末端,这能够使电极4926a抵靠血管壁成弧形。导管轴4930可以用于提供一些刚度以将电极4926a保持就位并抵靠血管壁。可扩张结构4920可以用在丝线上系统中或用作斯旺-甘兹氏系统的一部分。
可膨胀元件4924a、4924b可以包括例如球囊4924a1、4924a2、4924b1、4924b2,这些球囊经由单个共同的膨胀内腔(例如,与每个球囊4924a1、4924a2、4924b1、4924b2流体连通,其可以有利地提供均匀的膨胀)、多个共同的膨胀内腔(例如,与球囊4924a1、4924a2流体连通的第一膨胀内腔和与球囊4924b1、4924b2流体连通的第二膨胀内腔,其可以在可扩张结构的一个周向区域中有利地提供球囊的均匀膨胀)或单独膨胀内腔(其可以有利地提供对单独球囊的膨胀的完全控制)可膨胀。当通过导管导航可扩张结构4920时,可膨胀元件4924a、4924b能够有利地提供顺应性。
可扩张结构4920的多个可膨胀元件4924a、4924b包括第一可膨胀元件4924a和第二可膨胀元件4924b。可膨胀元件4924a、4924b在周向上相邻或间隔开小于约30°。其他周向间隔也是可行的(例如,小于约90°、约60°、约45°、约15°、约10°、约5°、在这些值之间的范围等)。可以例如在中点之间、在类似边缘之间以及如可以适合于构造可膨胀元件的其他方法来测量周向间距。可膨胀元件4924a包括第一球囊4924a1和第二球囊4924a2。第一球囊4924a1通常平行于第二球囊4924a2。可膨胀元件4924b包括第一球囊4924b1和第二球囊4904b2。第一球囊4924b1通常平行于第二球囊4924b2。可膨胀元件4924a、4924b可以包括更少的球囊(例如,一个球囊)或更多的球囊。附加地和/或替代平行地,球囊可以在纵向上对准、成角度、沿周向、其组合等。在一些示例中,单个可膨胀元件可以包括装置的每个球囊(例如,每个球囊4924a1、4924a2、4924b1、4924b2)。多个可膨胀元件能够提供更好的壁贴近、顺应性、向血管壁的血液流动和/或其他优点。
可膨胀元件4924a、4924b可以填充有盐水、造影剂或其他生物相容性流体。如果可膨胀元件4924a,4924b被填充有造影剂,则可以在荧光检查下观察可扩张结构4920的位置和旋转取向。如果观察到可扩张结构4920的位置和/或旋转取向是不期望的,则可扩张结构4920可以收缩(例如,包括使可膨胀元件4924a、4924b紧缩)并重新定位。
可膨胀元件4924a、4944b可以包括电极4926a。电极4926a可以例如被印刷在球囊4924a1、4924a2、4924b1和/或4924b2上。球囊4924a1、4924a2、4924b1、4924b2中的一些球囊可以包括电极4926a,并且球囊4924a1、4924a2、4924b1、4924b2中的一些球囊可以缺乏电极4926a。例如,可膨胀元件4924a的球囊4924a1、4924a2可以包括电极4926a,并且可膨胀元件4924b的球囊4924b1、4924b2可以不具有电极4926a。又例如,可膨胀元件4924a的球囊4924a1、4924a2之一可以包括电极4926a,而可膨胀元件4924b的球囊4924b1、4924b2之一可以包括电极4926a。用于电极4926a的导体可以被印刷在可膨胀元件4924a、4924b上、嵌入在可膨胀元件4924a、4924b的材料中、和/或延伸通过膨胀内腔。关于图23Ni至23Nvix描述了非限制性示例印刷过程,其中基板2301可以是可膨胀元件4924a,4924b的材料。图49B中所示的电极4926a沿着球囊4924a2在纵向上间隔开,但是其他布置也是可行的。附加地或替代定位在球囊上,电极4926a可以定位在可膨胀元件4924a、4924b的球囊之间。这种布置可以使电极4926a与血管壁间隔开,并允许血液流过电极4926a,例如,从而提供关于图23L和53B描述的优点。
例如类似于如本文所述的样条,管状构件4928可以包括电极4926b。图49B示出了可扩张结构4920,其中可膨胀元件4924a和/或4924b包括电极4926a,并且管状构件4928包括电极4926b,但是在一些示例中,仅可膨胀元件4924a、4924b包括电极4926a,或者仅管状构件4928包括电极4926b。
电极4926a和/或4926b能够形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按照本文所述的其他系统。在可扩张结构4920膨胀时,电极矩阵的电极可以被选择性地激活,以测试神经捕获、校准和/或治疗,例如,如本文所述。
可扩张结构4920可以在与相对于可扩张结构4120描述的那些取向类似的取向下在脉管系统中扩张。例如,脉管系统可以包括肺干、右肺动脉(例如,如图41G中所示)、以及左肺动脉。在一些示例中,导管4930是不对称的,使得导管轴能够弯曲(例如,在斯旺-甘兹氏系统中浮动期间),以使可扩张结构4920与右肺动脉自然对准。
图49C是处于扩张状态下的示例可扩张结构4940的透视图。可扩张结构4940包括近端部分4941和远端部分4943。可扩张结构4940包括多个可膨胀元件4944a、4944b、4944c、4944d(在图49C的视图中不可见)。可膨胀元件4944a、4944b、4944c、4944d可以在近端处耦接至导管4950。可膨胀元件4944a、4944b、4944c、4944d可以在远端处耦接至导管4950。可膨胀元件4944a、4944b、4944c、4944d可以在近端和远端之间(例如,连续地或不连续地)耦接至导管4950。导管4950可选地包括内腔、例如导丝内腔。可扩张结构4940可以用于丝线上系统中或作为斯旺-甘兹氏系统的一部分。
可膨胀元件4944a、4944b、4944c、4944d均可以包括例如一个或多个球囊,所述一个或多个球囊这些球囊经由单个共同的膨胀内腔(例如,与每个球囊流体连通,其可以有利地提供均匀的膨胀)、多个共同的膨胀内腔(例如,与可膨胀元件4944a、4944c的球囊流体连通的第一膨胀内腔和与可膨胀元件4944b、4944d的球囊流体连通的第二膨胀内腔,其可以在可扩张结构的选定的相对周向区域中提供球囊的均匀膨胀)、或单独的膨胀内腔(其可以有利地提供对单独球囊的膨胀的完全控制)可膨胀。可膨胀元件4944a、4944b、4944c、4944d中的一个或多个可以包括多个球囊,例如,如本文关于图49A-49B所述。当通过导管导航可扩张结构4940时,可膨胀元件4944a、4944b、4944c、4944d可以有利地提供顺应性。
可扩张结构4940的多个可膨胀元件4944a、4944b、4944c、4944d包括第一可膨胀元件4944a、第二可膨胀元件4944b、第三可膨胀元件4944c和第四可膨胀元件4944d。其他数量的可膨胀元件也是可行的(例如,2、3、5、6、7、8、9、10等)。图49Ci是处于扩张状态下的示例可扩张结构4943的透视图。可扩张结构4943包括六个可膨胀元件4944a、4944b、4944c、4944d(不可见)、4944e(不可见)、4944f。可膨胀元件4944a、4944b、4944c、4944d可以在周向上均匀地间隔开。例如,周向间隔可以是约30°、约36°(例如,对于10个膨胀元件)、约40°(例如,对于9个膨胀元件)、约45°(例如,对于8个膨胀元件)、约51°(例如,对于7个膨胀元件)、约60°(例如,对于6个膨胀元件)、约72°(例如,对于5个膨胀元件)、约75°、约90°(例如,对于4个膨胀元件)、115°、约120°(例如,对于3个可膨胀元件)、约130°、约145°、约160°、约180°(例如,对于2个可膨胀元件)、在这些值之间的范围等)。可膨胀元件4944a、4944b、4944c、4944d可以在周向上不均匀地间隔开。可膨胀元件4944a、4944b、4944c、4944d可以在周向上成簇(例如,在纵向轴线的一侧上的可膨胀元件4944a、4944b、4944c和在纵向轴线的相对侧上的可膨胀元件4944c)。在一些示例中,成簇的可膨胀元件可以包括电极4946a,并且相对的可膨胀元件可以缺乏电极。可以例如在中点之间、类似边缘之间以及如可能适合于构造可膨胀元件的其他方法来测量周向间距。
可膨胀元件4944a、4944b、4944c、4944d可以填充有盐水、造影剂或其他生物相容性流体。如果可膨胀元件4944a、4944b、4944c、4944d被填充有造影剂,则可以在荧光检查下观察可扩张结构4940的位置和旋转取向。如果观察到可扩张结构4940的位置和/或旋转取向是不期望的,则可扩张结构4940可以收缩(例如,包括使可膨胀元件4944a、4944b、4944c、4944d紧缩)并重新定位。如果期望精确的旋转取向,则可膨胀元件4944a、4944b、4944c、4944d可以是不对称的。
可膨胀元件4944a、4944b、4944c、4944d可以包括电极4946a。电极4946a可以例如被印刷在可膨胀元件4944a、4944b、4944c、4944d的一个或多个球囊上。一些球囊可以包括电极4946a,而一些球囊可以缺乏电极4946a。例如,可膨胀元件4944a、4944b的球囊可以包括电极4946a,并且可膨胀元件4944c、4944d的球囊可以不具有电极4946a。用于电极4946a的导体可以被印刷在可膨胀元件4944a、4944b、4944c、4944d上、嵌入可膨胀元件4944a、4944b、4944c、4944d的材料中、和/或延伸通过膨胀内腔。关于图23Ni-23Nvix描述了非限制性示例印刷过程,其中基板2301可以是可膨胀元件4944a、4944b、4944c、4944d的材料。可扩张结构4940的电极4946a沿着球囊4944a2在纵向上间隔开,但是其他布置也是可行的。例如,图49Cii是处于扩张状态下的示例可扩张结构4945的透视图,其中,可扩张结构4945包括在可膨胀元件4944a、4944b的每个球囊上的两排电极4946a、4946b。
电极4946a和/或4946b可以形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按本文所述的其他系统。在可扩张结构4940、4943、4945膨胀时,电极矩阵的电极可以被选择性地激活,以用于测试神经捕获、校准和/或治疗,例如,如本文所述。
再次参照图49Ci,可膨胀元件4944a至4944f中的每个均包括内腔4952。例如,与封闭的可膨胀元件相比,内腔4952能够提供用于血流的更大横截面积。例如与封闭的可膨胀元件相比,内腔4952还可以使可扩张结构4943更紧凑。在一些示例中,可膨胀元件4944a-4944f可以包括弹性或自膨胀材料。在某些这样的示例中,可以省略膨胀介质、内腔等。为了简单起见,在图49Ci中未示出电极4946a、4946b。内腔4952可以是例如薄的球囊构件,该薄的球囊构件能够减少(例如,最小化)血管的闭塞,但是提供足够的径向膨胀以接触血管壁。
图49D是处于扩张状态下的示例性可扩张结构4960的透视图。可扩张结构4960包括近端部分4961和远端部分4962。可扩张结构4960包括第一脊柱(spine)4968a、第二脊柱4968b以及在第一脊柱4968a与第二脊柱4968b之间延伸的多个样条4964。与扩张状态相比,在塌缩状态下,第一脊柱4968a可以向近端收缩。在一些示例的塌缩状态下,第一脊柱4968a和第二脊柱4968b可以在纵向上对准。在一些示例的塌缩状态下,第一脊柱4968a的远端部分和第二脊柱4968b的近端部分可以在纵向上重叠。可扩张结构4960可以包括形状记忆材料、诸如镍钛诺,其在力释放(例如,限制在导管中)和/或温度变化时从塌缩状态转变成扩张状态。可扩张结构可以通过相对于第二脊柱4968b向远端前进第一脊柱4968a和/或相对于第一脊柱4968a通过向近端缩回第二脊柱4968n可扩张。在一些示例中,可扩张结构4960可以包括形状记忆材料以扩张至第一扩张状态,并且可以通过相对于第二脊柱4968b向远端前进第一脊柱4968a和/或通过相对于第一脊柱4968a向近端缩回第二脊柱4968n而进一步扩张至第二扩张状态。这种进一步扩张能够帮助将可扩张结构锚固在血管中,例如,如本文关于图37Li至37Liv所述。在一些示例中,可以从单个海波管切割出脊柱4968a、4968b和样条4964以形成整体式支撑结构。在一些示例中,脊柱4968a、4968b和样条4964中的一些或全部可以独立地形成并且然后耦接。
可扩张结构4960的样条4964成对设置,这些对沿着每个脊柱4968a、4968b在纵向上间隔开。其他配置也是可行的。例如,单个样条4964可以沿着每个脊4968a、4968b在纵向上间隔开。对于另一个示例,单个样条4964可以在纵向上重叠(例如,但是在周向上不重叠)。又例如,两个以上的样条4964可以在脊柱4968a、4968b之间延伸。
样条4964可以包括如本文所述的电极4966,例如但不限于如相对于可扩张结构3620的样条3622所描述的。在图49D的可扩张结构4960中,成对的样条4964中的每对样条的一个样条4964包括电极4966,并且成对样条中的另一个样条4964不包括电极4966。包括电极4966的样条4964在包括可扩张结构4960的纵向轴线的第一平面的一侧上,并且不包括电极4966的样条4964在第一平面的相反侧上。电极4966位于样条4964的在包括纵向轴线的第二平面的一侧上的部分上,并且样条4964的在第二平面的相对侧上的部分不包括电极4966。这种布置能够帮助瞄准血管或神经部位的一部分和/或在塌缩状态下减小轮廓。脊柱4968a、4869b能够被拉入导管中(例如,被部署和/或缩回)。样条4964能够增加(例如,优化)电极在血管壁上的放置。脊柱4968a、4869b中的一个或两个能够增加(例如,优化)样条4964和电极4966抵靠血管壁的接触。
图50A是处于扩张状态下的示例性可扩张结构5000的透视图。可扩张结构5000包括近端部分5001和远端部分5002。可扩张结构5000包括在近端和远端之间的多个样条5004。样条5004在径向地会聚在近端部分5001中。近端部分5001可以被认为是封闭的。封闭的近端能够使可扩张结构5000更可靠地缩回到导管中,该可扩张结构具有敞开的近端。样条5004在远端部分5002中径向向外。一些或全部样条5004可以包括如本文所述的电极,例如但不限于如相对于可扩张结构3620的样条3622所述的电极。例如,三个周向上相邻的样条5004可以包括电极,并且其余的样条5004可以没有电极。在一些示例中,包括电极的样条5004位于包括可扩张结构5000的纵向轴线的平面的一侧上,并且不包括电极的样条5004可以位于该平面的相对侧上。可扩张结构5000可以包括附加样条5008,例如在样条5004的远端的附加样条(例如,如图50A中所示)。附加样条5008能够帮助将可扩张结构5000锚固在血管中。
图50B是处于扩张状态下的示例可扩张结构5020的透视图。可扩张结构5020包括近端部分5021和远端部分5022。可扩张结构5020包括在近端和远端之间的多个样条5024。样条5024在近端部分5021中径向向外。近端部分5021可以被认为是敞开的。可扩张结构5020的近端部分5021可以包括近端系链,例如如本文所述,近端系链能够允许将可扩张结构5020缩回到导管中。样条5024在远端部分5022中径向向外。远端部分5022可以被认为是敞开的。一个敞开端或两个敞开端能够减少闭塞和/或增强血液流过可扩张结构5020所处的血管。样条5024中的一些或全部可以包括如本文所述的电极,例如但不限于如相对于可扩张结构3620的样条3622所描述的。例如,三个在周向上相邻的样条5024可以包括电极,并且其余的样条5024可以没有电极。在一些示例中,包括电极的样条5024可以位于包括可扩张结构5020的纵向轴线的平面的一侧上,并且不包括电极的样条5024位于该平面的相对侧上。可扩张结构5020可以包括附加样条5028,例如在样条5024的近端和远端的附加样条(例如,如图50B所示)。附加样条5028能够帮助将可扩张结构5020锚固在血管中。
图50C是处于扩张状态下的示例性可扩张结构5040的透视图。可扩张结构5040包括近端部分5041和远端部分5042。可扩张结构5040包括在近端和远端之间的多个样条5044、5045。样条5044在近端部分5041中径向向外。近端部分5041可以被认为是敞开的。可扩张结构5040的近端部分5041可以包括近端系链,例如如本文所述,该近端系链能够允许将可扩张结构5040缩回到导管中。在可扩张结构5040中,样条5044会聚到两个周向点5046。如果将系链附接到点5046,以使得点5046能够缩回到导管中,则整个可扩张结构5046能够塌缩到导管中。样条5045在远端部分5042中径向向外。远端部分5042可以被认为是敞开的。一个敞开端或两个敞开端能够减少闭塞和/或增强血液流过可扩张结构5040所处的血管。样条5044、5045中的一些或全部可以包括如本文所述的电极,例如但不限于相对于可扩张结构3620的样条3622所描述的。例如,三个周向上相邻的样条5044、5045可以包括电极,并且其余的样条5044、5045可以没有电极。在一些示例中,包括电极的样条5044、5045可以位于包括可扩张结构5040的纵向轴线的平面的一侧上,并且不包括电极的样条5044、5045位于该平面的相对侧上。
可扩张结构5000、5020、5040可以包括诸如镍钛诺的形状记忆材料,该材料在力释放(例如,限制在导管中)和/或温度变化时从塌缩状态转变到扩张状态。在一些示例中,可以从单个海波管切割出样条5004、5024、5044、5045以及可选地附加样条5008、5028,以形成整体式支撑结构。在一些示例中,样条5004、5024、5044、5045中的一些或全部以及可选地附加样条5008、5028可以独立地形成并且然后耦接。
图51A是处于扩张状态下的示例可扩张结构5100的透视图。可扩张结构5100包括近端部分5101和远端部分5102。可扩张结构5100包括在近端和远端之间的多个样条5104。样条5104在近端部分5101中径向向外。近端部分5101可以被认为是敞开的。在可扩张结构5100中,样条5104会聚到两个周向点5105。系链5110附接到点5105,这能够允许将可扩张结构5100缩回到导管中,如本文关于图51Ei至51Ev所述的。系链5110可以包括例如结构线、丝线、聚氨酯管等。在一些示例中,可以将用于电极5106的电连接器束接以形成系链5110。样条5104在远端部分5102中径向向外。远端部分5102可以被认为是敞开的。一个敞开端或两个敞开端能够减少闭塞和/或增强血液流过可扩张结构5100所处的血管。系链5110能够减少(例如,最小化)心脏移动。系链5110能够消除导管的应变。如果将系链5110视为绳,则导管的移动不能推动可扩张结构5100。如果将松弛留在原位,则系链5110不能拉动,这可以允许导管主体迁移(例如,从肺动脉迁移到右心室),或者甚至完全移除。如果导管主体就位、例如在右心室中,则心脏移动不应推动或拉动可扩张结构5100,这会使心脏移动解耦。
样条5104中的一些或全部可以包括如本文所述的电极5106,例如但不限于如相对于可扩张结构3620的样条3622所描述的。例如,在图51A中所示的可扩张结构5100中,四个周向上相邻的样条5104包括电极5106,并且其余的样条5104没有电极5106。在一些示例中,诸如在可扩张结构5100中,包括电极5106的样条5104位于包括可扩张结构5100的纵向轴线的平面的一侧上,并且不包括电极5106的样条5104位于该平面的相对侧上。可扩张结构5100可以包括附加样条5108,例如在样条5104的远端(例如,如图51A中所示)的附加样条。附加样条5108能够帮助将可扩张结构5100锚固在血管中。
电极5106能够形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按照本文所述的其他系统。在可扩张结构5100扩张时,电极矩阵的电极5106可以被选择性地激活,以测试神经捕获、校准和/或治疗,例如,如本文所述。可扩张结构5100的电极5106能够位于左肺动脉和右肺动脉之间的肺动脉切口或分支处。附加样条5108能够将可扩张结构5100锚固在血管(例如,右肺动脉)中。例如,作为可扩张结构5100的最远端部分的附加样条5108能够延伸到右肺动脉中,例如在肺动脉分支的远侧。电极5106能够朝着肺动脉分支悬臂式地返回。
图51B是处于塌缩状态下的示例性可扩张结构5120的透视图。图51C是处于扩张状态下的示例性可扩张结构5120的透视图。可扩张结构5120可以包括与可扩张结构5100类似的特征(例如,样条5124、附加样条5128、切割图案、材料等),但具有一些区别。例如,可扩张结构5120可以包括系链5110,但是为了简单起见,图51B和51C中省略了任何这样的系链5110。对于另一个示例,可扩张结构的电极5106位于用于每个样条5104的管状元件上,但是电极5126单独地耦接到支柱5124。如图51B中所示,在塌缩状态下,电极5126能够嵌套。嵌套的电极5126可以提供减小的输送轮廓。本文所述的其他可扩张结构的电极也可以被配置成以塌缩状态嵌套。
图51D是示例导管5140的剖视图,该导管5140用于容纳处于塌缩状态下的可扩张结构。导管5140示意性地示出了9Fr外径导管如何能够在四个样条5144上容纳1mm的电极(例如,样条5104上的电极5106,样条5124上的电极5126)和被配置为允许0.025英寸的导丝通过的导丝内腔5142。可扩张结构的不包括电极的部分趋于于更容易被容纳并且未被示出。
图51Ei至51Ev示出了取回可扩张结构5160的示例方法。为了简单起见,可扩张结构5160仅包括具有电极的两个支柱5164,但是可扩张结构5160可以包括与例如可扩张结构5100、5120类似的特征。可扩张结构5160包括耦接至近端点的系链5162。图51Ei至51Ev还示出了可以用于捕获可扩张结构5160的导管的护套5170。导管可选地包括管状构件5172。管状构件5172可以包括导丝内腔。在一些示例中,系链5172被耦接至管状构件5172(例如,如图51Ei中所示)。在某些这样的示例中,管状构件5172可以相对于护套5170在纵向上移动,以用于扩张和/或捕获可扩张结构5170。在一些示例中,系链5172耦接至不同的管状构件。在一些示例中,系链5172未耦接至管状构件,例如向护套5170的近端延伸以由用户直接操纵的管状构件。管状构件5172可选地包括末端5174。末端5174可以包括无创伤远端。末端5174可以被配置成例如如图51Ev所示闭塞护套5170。
图51Ei示出了在从护套5170释放之后处于扩张状态下的可扩张结构5160。在血管中,支柱5164将贴近血管壁,并且电极5166将形成被配置为刺激目标神经的电极矩阵。图51Eii示出了在管状构件5172向近端缩回和/或护套5170向远端前进之后的可扩张结构5160。系链5162的近端靠近护套5170的远端,并且可扩张结构仍处于扩张状态下。图51Eiii示出了在管状构件5172进一步向近端缩回和/或护套5170进一步向远端前进之后的可扩张结构5160。系链5162位于护套5170中,并且可扩张结构5160的近端部分位于护套5170中。系链5162将可扩张结构5160的近端部分径向向内引导并且引导到护套5170的远端中。可扩张结构5160的近端部分被护套5170在径向上压缩,从而将可扩张结构5160的其余部分朝着压缩状态在径向上压缩。图51Eiv示出了在管状构件5172进一步向近端缩回和/或护套5170进一步向远端前进之后的可扩张结构5160。可扩张结构5160的大部分位于护套5170中。图51Ev未示出可扩张结构5160,这是因为在管状构件5172进一步向近端缩回和/或护套5170进一步向远端前进之后,可扩张结构5160在塌缩状态下位于护套5170中。末端5174与护套5170的远端配合。例如,如本文所述,可扩张结构5170可以被配置成在失效和/或移动时塌缩到护套5170中。
图51Fi是处于扩张状态下的示例性可扩张结构5180的透视图。图51Fii是图51Fi的示例性可扩张结构5180的侧视图。可扩张结构5180耦接至导丝护套5182。通过将导丝5183的近端定位在导丝护套5182的内腔中而能够在导丝5183上跟踪可扩张结构5180。可扩张结构5180包括位于近端和远端之间的多个第一样条5184。多个第一样条5184从近端到远端从毂5186的一侧沿纵向和周向地朝远端延伸。这样的配置能够例如减少内腔、诸如血管中的样条材料的量。从毂5186的延伸能够允许将可扩张结构5180缩回到导管5181中(例如,通过向近端缩回导丝护套5182和/或向远端前进导管5181)。可扩张结构可以包括多个第二样条5188。如图51Fi中最佳可见,多个第二样条5188能够形成环形保持架,该环形保持架被配置成将可扩张结构5180锚固在血管(例如右肺动脉)中。例如,作为可扩张结构5180的最远端部分的样条5188能够延伸到右肺动脉中、例如在肺动脉分支的远端的右肺动脉中。在扩张状态下,导丝护套5182靠近可扩张结构5180的圆周的近端,例如如与在可扩张结构5180的中心部分中相反。靠近圆周的导丝护套5182能够减少内腔(诸如血管)的中心部分中材料的量。这能够减少导丝护套5182与血液的相互作用,从而降低栓塞的风险。如果导丝护套5182与血管壁相邻一段延长的时段,则导丝护套5182可以包括涂层以抑制内皮化。
样条5184中的一些或全部可以包括如本文所述的电极5186。在一些示例中,在将样条5184耦接至毂5186之前,可以将电极结构(例如,如关于图53A所述)耦接至样条5184。在图51Fi中所示的可扩张结构5180中,四个周向上相邻的样条5184能够包括电极,并且两个其余的样条5184可以没有电极5186。如图51Fii中最佳可见,包括电极的样条5184可以位于分割可扩张结构5180的平面的一侧上,并且不包括电极的样条5184可以位于该平面的相反侧上。电极能够形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按照本文所述的其他系统。在可扩张结构5180扩张时,电极矩阵的电极可以被选择性地激活,以测试神经捕获、校准和/或治疗,例如,如本文所述。可扩张结构5180的电极能够被定位在例如右肺动脉中。
图52Ai是处于扩张状态下的示例性可扩张结构5200的透视图。图52Aii是处于扩张状态的图52Ai的可扩张结构5200的侧视图。图52Aiii是处于扩张状态下的图52Ai的可扩张结构5200的端视图。可扩张结构5200包括近端部分5201和远端部分5202。可扩张结构5200包括在近端和远端之间的多个样条5204。在完全扩张的状态下,样条5204在近端部分5201中径向向外突出以形成几乎球形形状。在可扩张结构5200中,样条5204向周向点会聚,可选地耦接到近端毂5205,这能够允许将可扩张结构5200缩回到导管5209中,如本文关于图22F、22M、36B、37B和50A所述。样条5204是柔韧的,这能够有助于样条5204符合其所处的血管(例如,右肺动脉)的形状。可扩张结构5200可以包括附加样条5208,例如在样条5204的远端的附加样条(例如,如图52A所示)。附加样条5208能够帮助将可扩张结构5200锚固在血管中。例如,某些可扩张结构可以仅包括高度顺应的样条,这对于短期使用是可以接受的,但是锚固样条5208能够帮助在长的治疗持续时间(例如0.5至6天)内保持顺应的样条的位置。远端部分5202中的附加样条5208可以围绕和/或平行于可扩张结构5200的纵向轴线大致在周向上定位。远端部分5202可以被认为是敞开的。一个敞开端或两个敞开端能够减小闭塞和/或增强血液流过可扩张结构5200所处的血管。
在一些示例中,近端部分5201包括第一组样条5204,而远端部分5202包括第二组样条5208。第一组样条5204可以具有比第二组样条更高的顺应性(例如,较低的弹性系数)。在一些示例中,在完全扩张的状态下,近端部分5201具有第一形状(例如,球形),而远端部分5202具有第二形状(例如,圆柱形)。在一些示例中,在完全扩张的状态下,近端部分5201具有第一直径,而远端部分5202具有小于第一直径的第二直径。例如,参照图52Aiii,近端部分5201的样条5204和远端部分5202的样条5208之间的半径之差Δr可以为约1mm至约4mm(例如,约1mm、约2mm、约3mm、约4mm、在这些值之间的范围等)。在部分扩张的状态下(例如,由血管壁限制),第一直径和第二直径可以相同。
在一些示例中,近端部分5201和远端部分5202可以从单个管或片材整体切割而成,这能够减少将近端部分5201和远端部分5202耦接的需要。耦接点能够是容易断裂的削弱点。在一些示例中,近端部分5201可以从第一管或片材切割而成,而远端部分5202可以从与第一管或片材不同的第二管或片材切割而成,并且近端部分5201可以与远端部分5202耦接。从不同的管或片材切割可以更有效地分离某些特性,诸如径向刚度。在一些示例中,整体式结构的切割能够尝试模仿单独切割的效果,例如通过改变厚度和/或几何形状、扭曲等。
样条5204中的一些或全部可以包括如本文所述的电极5206,例如但不限于如相对于可扩张结构3620的样条3622所描述的。例如,在图52Aii中所示的可扩张结构5200中,两个周向上相邻的样条5204包括电极5206,并且其余的样条5204没有电极5206。在一些示例中,诸如在可扩张结构5200中,包括电极5206的样条5204可以位于包括可扩张结构5200的纵向轴线的平面的一侧上。不包括电极5206的样条5204可以位于该平面的相对侧上。电极5206可以被包覆成型在绝缘材料中,例如,如关于图53A至53Eii所描述的。在耦接包覆成型的电极结构之后,样条5204可以耦接至毂5205。
电极5206能够形成电极矩阵。电极矩阵中的电极数量、电极尺寸、电极间距等可以按照本文所述的其他系统。图52Ai和52Aii示出了两个样条5204,每个样条5204均具有三个电极5206,从而形成了六个电极5206的2×3矩阵。在可扩张结构5200扩张时,电极矩阵的电极5206可以被选择性地激活以测试神经捕获、校准和/或治疗(例如,以增加左心室收缩性和/或松弛性的神经刺激),例如如本文所述。在一些示例中,每个样条5204均可以包括电极5206,从而形成全周向电极阵列。全周向电极阵列能够有利地避免旋转重新定位。部分周向电极阵列(例如,如图52Ai和52Aii中所示)能够降低成本、装置尺寸和/或制造复杂性。能够根据需要旋转地重新定位部分周向电极阵列。例如,电极结构5200可以被部署、测试(例如,通过激活电极的组合),然后在需要时取回、扭转、重新部署和重新测试,其能够根据需要重复进行。
可扩张结构5200的电极5206能够位于左肺动脉和右肺动脉之间的肺动脉切口或分支处。附加样条5208能够将可扩张结构5200锚固在血管(例如,右肺动脉、左肺动脉)中。例如,作为可扩张结构5200的最远端部分的附加样条5208能够延伸到右肺动脉或左肺动脉中,例如在肺动脉分支的远端的右肺动脉或左肺动脉中。
图52Aiv示出了位于右肺动脉5214中的图52Ai的可扩张结构5200。样条5208将可扩张结构5200锚固在右肺动脉中。参照图2B,在一些示例中,样条5208位于右侧平面216的右方。样条5204符合肺动脉5214的形状,并且基于可扩张结构5200的期望位置可以符合肺干5212和/或左肺动脉5216的形状。
图52Bi是处于扩张状态下的示例性可扩张结构5220的透视图。图52Bii是处于扩张状态下的图52Bi的可扩张结构5220的端视图。可扩张结构5220可以具有与可扩张结构5200相似的特征(例如,近端部分5221、远端部分5222等)。在可扩张结构5220中,近端部分5221包括两种类型的样条5224a、5224b。样条5224a可以类似于可扩张结构5200的样条5204。样条5224b在近端部分5221的近端和近端部分5221的远端之间被分支。样条5224b朝向近端部分5221的远端变得在周向上更远离近端部分5221的近端,并且朝向近端部分5221的近端变得在周向上更远离近端部分5221的远端,从而在近端部分的中间部分最远地分开。样条5224b的分支能够有助于稳定相邻样条之间的距离。在一些示例中,每个样条5224b均可以包括电极。在一些示例中,每个样条5224a均可以包括电极。在一些示例中,样条5224b中的一些可以包括电极。在一些示例中,样条5224a中的一些可以包括电极。在一些示例中,样条5224b中的一些可以包括电极,并且样条5224a中的一些可以包括电极。如本文所述,包括电极的较多的样条5224a和/或5224b能够减少重新定位,而包括电极的较少的样条5224a和/或5224b能够减少装置尺寸、成本和/或制造复杂性。
如图52Bii最佳所示,样条5224a、5224b围绕可扩张结构5220的周向交替。在一些示例中,分支样条5224b可以在周向上相邻。在一些示例中,可扩张结构5220能够包括比样条5224a更多的分支样条5224b。在一些示例中,可扩张结构5220能够仅包括分支样条5224b而没有样条5224a。在一些示例中,可扩张结构5220能够包括比样条5224a更少的分支样条5224b。近端部分5221的样条5224a、5224b和远端部分5222的样条5228之间的半径之差Δr可以为约1mm至约4mm(例如,约1mm、约2mm、约3mm、约4毫米、在这些值之间的范围等)。图52Bi中示出的远端部分5222包括六个单元,每个单元向近端逐渐变细,然后是尾部。尾部中的三个是分支样条5224b,而尾部中的三个是样条5224a。在一些示例中,仅其中一个尾部是分支样条5224b。
图52Ci是处于扩张状态下的示例性可扩张结构5230的透视图。图52Cii是处于扩张状态下的图52Ci的可扩张结构5230的侧视图。可扩张结构5230可以共享与可扩张结构5200相似的特征(例如,近端部分5231、远端部分5232等)。在可扩张结构5230中,样条5234的近端包括在图52Cii中最佳可见的S形特征,然后会聚到一点。样条5234在会聚到周向点5235之前在近端处具有S形特征。S形特征能够例如减小主肺动脉中的可扩张结构5230的长度。例如,与可扩张结构5200相比,可扩张结构5230能够短几毫米,这是因为样条5234向远端然后向近端弯曲而不是向远端连续弯曲。S形结构能够提供径向弹簧,该径向弹簧能够衰减移动。衰减移动能够例如由于血流和/或呼吸而有助于在移动期间保持电极5206的位置。能够基于例如样条5234的厚度、样条5234的几何形状、沿着导丝护套5237滑动毂5235、其组合等来调整或定制S形特征的弹簧特性。电极5236可以定位在样条5234的顶点上和/或靠近样条5234的顶点定位。
图52Ciii示出了位于右肺动脉中的图52Ci的可扩张结构。样条5238将可扩张结构5230锚固在右肺动脉中。参照图2B,在一些示例中,样条5238在右侧平面216的右方。样条5234符合肺动脉5214的形状,并且基于可扩张结构5230的期望位置可以符合肺干5212和/或左肺动脉5216的形状。
图52Di是处于扩张状态下的示例可扩张结构5240的透视图。图52Dii是处于扩张状态下的图52Di的可扩张结构5240的侧视图。图52Diii是处于扩张状态下的图52Di的可扩张结构5240的端视图。可扩张结构5240可以共享与可扩张结构5230相似的特征(例如,包括S形特征的近端部分5231、远端部分5232等)。在可扩张结构5240中,近端部分5241包括样条5244,样条5244在近端部分5241的近端和近端部分5241的远端之间分支。样条5244朝向近端部分5241的远端在周向上更远离近端部分5241的近端,并且朝向近端部分5241的近端在周向上更远离远端部分5242的单元之间的接头,从而在在近端部分5241的中间部分中最远地分开。如图52Diii中最佳可见,成对的样条5244至少对于S形特征是并排的。样条5244的分支能够有助于稳定相邻样条之间的距离。
图52E是处于扩张和前进状态下的示例可扩张结构5250的透视图。可扩张结构5250包括近端部分5251和远端部分5252。例如,像可扩张结构5200、5220、5230、5240一样,远端部分包括被配置成将可扩张结构5250锚固在血管中的多个支柱5258。近端部分5251包括将远端部分5252耦接到细长构件的多个样条5255。近端部分5251还包括包含电极5256的导丝护套5254。导丝护套5254的远端固定地耦接至远端部分5252。导丝护套5254的近端能够相对于可扩张结构5250移动。随着导丝护套5254向远端前进,导丝护套5254径向向外弯曲(bow)。在一些示例中,远端部分5252被配置为锚定在左肺动脉中,并且导丝护套5254被配置为弯曲到右肺动脉弯曲中。在一些示例中,导丝护套5254未配置为弯曲,但是样条5255包括电极5256并且配置成弯曲。在一些示例中,导丝护套5254包括电极5256并且被配置成弯曲,并且至少一个样条5255包括电极5256并且被配置成弯曲。在一些示例中,样条5255中的至少两个包括电极5256并且被配置成弯曲。使包括电极5256的导丝护套5254偏转能够减少可扩张结构5250的部件的数量。包括电极5256的多个样条5255和/或导丝护套5254能够形成嵌套的弧,从而形成电极矩阵。包括电极5256的多个样条5255和/或导丝护套5254能够独立地或非独立地操作。
图52Fi和52Fii示出了使用图52E的可扩张结构5250的示例方法。所示的解剖模型包括肺干5212、右肺动脉5214和左肺动脉5216。远端部分5252锚固在左肺动脉5216中。在图52Fi中,导丝护套5254的近端向远端前进,如由箭头5257所示,其导致导丝护套5254开始弯曲到右肺动脉5214中,如由箭头5258所示。在图52Fii中,导丝护套5254的近端进一步向远端前进,如由箭头5257所示,其导致导丝护套5254进一步弯曲到右肺动脉5214中,如由箭头5258所示。能够固定导丝护套5254的位置(例如,通过固定导丝护套5254的近端的位置),并且能够将神经刺激信号施加到电极5256。
图52Gi是处于塌缩状态下的示例性可扩张结构5260的透视图。与包括支架状特征的可扩张结构相比,可扩张结构5260能够提供显著更小的塌缩状态。图52Gii是处于扩张状态下的图52Fii的示例可扩张结构5260的透视图。装置5260包括从导管5265向远端延伸的第一导丝5262、导丝护套5264和第二导丝5268。导丝护套5264包括电极5266,并且被配置成例如类似于可扩张结构5450的导丝护套5254那样弯曲。与包括支架状特征的可扩张结构相比,可扩张结构5260能够提供一种通用型装置。例如,取决于径向强度,支架状结构可能需要具有在其所部署的血管的直径的一定百分比内的扩张直径;如果支架状结构太大,则可能会损坏血管或可扩张结构仅能扩张到对该过程不理想的状态(例如,使电极太靠近在一起);如果支架状结构太小,则可扩张结构可能无法锚固在血管中,从而使电极在过程期间可能移动。相比之下,可扩张结构5260不必受到这种潜在的不利影响,这是因为预加载的相对的导丝能够适应于任何直径。
图52Giii至52Gv示出了使用图52Gi的可扩张结构5260的示例方法。在图52Giii中,可扩张结构5260已经在左肺动脉5216中前进。可扩张结构被扩张,使得第一丝线5262抵靠左肺动脉5216的第一壁以及肺干5212被预加载,并且第二丝线5268抵靠左肺动脉5216的相对壁被预加载。可扩张结构5260优选地与左肺动脉5216的解剖结构一起弯曲。在图52Giv中,可扩张结构5260在扩张状态下向近端缩回,如由箭头5272所示。第二丝线5268卡入右肺动脉5214的口中,从而提供了一种将可扩张结构5260准确地部署到特定解剖位置中的自对准方法。第一丝线5262和第二丝线5268将可扩张结构5260锚固就位。在图52Gv中,导丝护套5276向远端前进,从而使导丝护套5264弯曲到右肺动脉5214中,如由箭头5278所示。导丝护套5264上的电极5266能够用于瞄准神经,用于如本文详细描述。丝线护套5264独立于第一丝线5262和第二丝线5268移动,这有利地使锚固结构和电极结构分离。如图52Gv中所示,导丝护套5264可以可选地在第二丝线5268的径向外侧延伸。如相对于可扩张结构5250所述的,导丝护套5264和/或一个或多个样条可以包括电极5266,并且将电极5266定位在导丝护套5264上能够减少部件的数量。
图52Gvi示出了使用包括电极样条5265的一种型式的可扩张结构5260的示例方法。电极样条5265能够独立于导丝护套5264或与导丝护套5264一起操作。当电极样条5265处于前进位置中时,如图52Gvi所示,电极样条5265与导丝护套5264嵌套在一起,从而形成电极5266的二维或三维矩阵。电极5266可以位于导丝护套5264和/或电极样条5265上,使得在前进位置中,电极5266处于瞄准特定解剖结构(例如,当被刺激时增加左心室收缩性和/或松弛的神经)的位置中。
图53A是示例电极组件5300的透视图。电极组件5300能够用于本文所述的可扩张结构中。电极组件5300包括散置在电绝缘材料5304之间的电极5306。每个电极5306均电耦接至电连接器5307。在其中电极5306位于管状装置上的示例中,电连接器5307可以延伸穿过管状装置的内腔5310。
图53B是图53A的圆53B中的电极5306区域的放大3,560倍的扫描电子显微镜图像。电极5306的表面通过激光烧蚀进行表面改性。激光烧蚀产生谷5322和山5324。在一些示例中,与山5324相比,谷5322的深度在约0.1mm与约1mm之间(例如,约0.1mm、约0.2mm、约0.3mm、约0.5mm、约0.7mm、约0.9mm、约1mm、在这些值之间的范围等)。激光烧蚀可以在一个方向、两个方向(例如,第一方向和横向于(例如,垂直于)第一方向的第二方向)上或多个方向上。在一些示例中,能够通过激光烧蚀将电极5306的有效表面积增加约300倍至约500倍。电极5306是圆柱形电极,但是能够在本文所述的任何电极上使用激光烧蚀。
激光烧蚀能够使电极5306的部分与血管壁间隔开,这能够允许血液流过电极5306。再次参照图23F,绝缘材料2316例如可以用作间隔件。允许血液流过电极2308可以抑制电极2308的腐蚀。允许血液流过电极2308可以允许血液接触电极2308的区域中的血管壁2397,从而可以补充单元。在一些示例中,电极可以包括纵向通道、凹凸表面等以允许血液从电极2308径向向外流动但是仍然较靠近神经2399。在某些这样的示例中,可以有利地增加电极2308的表面积
图53Ci至53Ciii-2示意性地示出了制造诸如图53A的电极组件5300的电极组件5300a、5300b的示例方法。图53Ci示出了电极5306在模具5340中的放置。当形成圆柱形电极组件5300时,模具5340可以具有圆柱形或环形形状。电极5306耦接到电连接器5307。图53Cii-1示出了利用诸如聚氨酯、硅树脂、其组合等的生物相容性电绝缘材料5342对模具5340中的电极5306进行包覆成型。电连接器5307处于与图53Ci中基本相同的位置。电连接器5307的某些部分被包封在绝缘材料5342中,而电连接器5307的其他部分未被包封在绝缘材料5342中,例如在绝缘材料5342的内表面之间的内腔5310中。图53Cii-2也示出了利用诸如聚氨酯、硅树脂、其组合等的生物相容性电绝缘材料5342对模具5340中的电极5306进行包覆成型。电连接器5307例如通过拉伸和/或通过包覆成型过程的径向向外的力而移动,使得基本上所有的电连接器5307都被包封在绝缘材料5342中。将电连接器5307包封在绝缘材料5342中能够帮助保护丝线,减少漏电的风险和/或减少丝线腐蚀的风险(例如,通过电连接器5307的绝缘中的针孔)。在一些示例中,将电连接器5307包封在绝缘材料5342中能够减少或消除对各个电连接器的电绝缘。图53Ciii-1和53Ciii-2分别示出了从模具5340移除电极组件5300a、5300b。所得到的电组件5300a、5300b示出为沿着图53A中的线53C-53C的横截面。包覆成型过程也能够应用于非环形电极。
图53Di和53Dii示意性地示出了制造示例电极组件5300c(诸如图53A的电极组件5300)的另一示例方法。图53Di示出了电极5306在模具5350中的放置。当形成圆柱形电极组件5300时,模具5350可以具有圆柱形或环形形状。模具5350包括诸如环形凹槽的特征5352,这些特征与重叠特征5354(诸如在成型过程期间形成的环形脊)的特征相反。电极5306耦接到电连接器5307。参照图53Cii-1,电极5306利用诸如聚氨酯、硅树脂,其组合等的生物相容性电绝缘材料5342在模具5350中包覆成型。电连接器5307处于与图53Cii-2中基本上相同的位置,例如通过拉伸和/或通过包覆成型过程的径向向外的力而移动,使得所有或基本上所有的电连接器5307被包封在绝缘材料5342中。将电连接器5307包封在绝缘材料5342中能够帮助保护丝线、降低漏电的风险和/或降低丝线腐蚀的风险(例如,通过电连接器5307的绝缘中的针孔)。在一些示例中,将电连接器5307包封在绝缘材料5342中能够减少或消除对各个电连接器的电绝缘。图53Dii示出了在从模具5350移除之后的电极组件5300c。所得到的电组件5300c被示出为沿着图53A中的线53C-53C的横截面。重叠特征5354密封电极5306的端部。重叠特征5354至少部分地限定电极5306的电活性区域的尺寸(例如,纵向宽度),这能够提供更可预测的和/或均匀的刺激。重叠特征5354可以使电极5306与血管壁间隔开,并且允许血液流过电极5306,例如,从而提供关于图23L描述的优点。包覆成型过程也可以应用于非环形电极。
图53Ei示意性地示出了另一示例电极组件5300d,诸如图53A的电极组件5300。与其中重叠特征5354在电极5306的纵向外侧返回到电极5306的外半径的图53Dii的电极组件5300c相反,电极组件5300d的重叠特征5356在电极5306的纵向外侧延伸过相同或基本上相同的径向宽度。如图53Dii中所示,返回到电极5306的外半径能够减少材料使用。延伸过相同或基本上相同的径向宽度能够减少模具的复杂性、增加壁贴近,和/或提供更高的制造公差。
图53Eii示意性地示出了另一示例电极组件5300e、诸如图53A的电极组件5300。与其中重叠特征5356在电极5306的纵向外侧是光滑的或基本上光滑的图53Ei的电极组件5300d相比,电极组件5300e的重叠特征5358包括带纹理表面,该带纹理表面能够形成锚固结构,例如从而提供关于图12A至12D和/或图27I描述的优点(例如,以这样的方式接触血管组织:使得电极5306在它们接触血管组织的位置处的移动被减少(例如,被最小化)和/或一些组织可以进入锚固结构之间的空间以增加组织接合的可能性)。锚固结构能够具有多种形状,包括圆锥形、无倒刺的钩、脊和谷、其组合等。与图53Ei中的电极组件5300d相比,包括具有带纹理表面的重叠特征5358的电极组件5300e能够减少材料使用。
图53F是示例电极5366的外部透视图。图53G是图53F的示例电极5366的内部透视图。例如,如相对于本文中的几种可扩张结构所描述的,可以从管或片材(例如,包括诸如镍钛诺的形状记忆材料)上切割(例如,激光切割)支柱5362。支柱5362还包括孔,该孔的尺寸和形状设计成接收电极5366。
电绝缘材料5364耦接到激光切割的支柱5362。如在图53F中最佳可见,电绝缘材料5364可以覆盖支柱5362的外侧。在一些示例中,支柱5362的外侧仅包括围绕电极5366的电绝缘材料5364。如在图53G中最佳可见,电绝缘材料5364可以覆盖支柱5362的内侧。在一些示例中,支柱5362的内侧仅包括围绕电极5366的电绝缘材料5364。在一些示例中,支柱5362的内侧包括围绕电极5366并且靠近电极5366(例如,在导体5368下方)的电绝缘材料5364。电极5366耦接到导体5368。导体5368可以被绝缘。
导体5368可以在不使用钎焊、熔焊等的情况下电耦接至电极5366。例如,电极5366能够穿过支柱5362的孔,然后在内侧变形(例如,锻造、压接)以将电极5366保持到支柱5362上,例如,如图53G中所示。在一些示例中,支柱5362能够包括可供导体5368插入其中的通道或狭槽。在一些示例中,能够将电绝缘材料施加到支柱5362的内侧的变形的电极5366和导体5368上,之后,电极5366仅暴露在外部,如图53F中所示。在一些示例中,支柱5362可以包括以相同方式耦接至其的多个电极5366。在一些示例中,可扩张结构能够包括多个支柱5362。多个支柱5362中的每个可以包括以相同方式耦接至其的多个电极5366。
图54A是心脏的示意图,其中包括可扩张结构5408的示例导管系统5402部署在右肺动脉5409中。导管系统5402包括在肺动脉5410中的第一压力传感器5404和在右心室5412中的第二压力传感器5406。图54B是示例压力传感器5420的透视图,该示例压力传感器5420能够用于第一压力传感器5404和/或第二压力传感器5406。图54B中所示的压力传感器5420包括例如可从Millar获得的基于Fr MEMS的压力传感器,该压力传感器包括向近端延伸的丝线5422。肺动脉瓣5411位于肺动脉5410和右心室5412之间。第一压力传感器5404和第二压力传感器5406能够用于检测导管移动,例如,如关于图54C所描述的。
图54C是示出用于监测导管移动的压力传感器的示例用途的曲线图。在顶部曲线图5442中示出了来自第一压力传感器5404的数据。在底部曲线图5444中示出了来自第二压力传感器5406的数据。在一些示例中,可以在同一曲线图上显示来自第一压力传感器5404和第二压力传感器5406的数据。在一些示例中,来自第一压力传感器5404和第二压力传感器5406的数据可以不显示给用户和/或可以在用户请求时显示,但是系统可以被配置为在感测到移动时发出警报。数据可以逐拍地、每秒或适当地以其他间隔进行。在第一持续时间5446期间,来自肺动脉的数据在一定范围内,并且来自右心室的数据在一定范围内。在第二持续时间5447期间,来自肺动脉的数据在不同范围内,而来自右心室的数据仍在一定范围内。来自肺动脉的数据在右心室的一定范围内,这可以向用户指示第一压力传感器5404已经从肺动脉5410经过肺动脉瓣5411迁移到右心室5412中。该迁移可以指示导管系统5402的迁移,导管系统5402包括提供刺激的可扩张结构5408。在进行这样的检测时,警报可能会响起,刺激可能会自动关闭,可扩张结构可能会塌缩,和/或可能发生其他事件。在持续时间5448期间,导管系统5402已被移动,使得第一压力传感器5404和第二压力传感器5406分别在肺动脉5410和右心室中。监测导管的移动能够警告用户迁移,这可能会引起不良事件,诸如心肌刺激、心律不齐、心脏结构损坏(例如,由于意外移除导管)等。
导管系统5302能够附加地或替代地包括第一压力传感器和第二压力传感器,该第一压力传感器和第二压力传感器被配置为检测其他位置的导管移动。例如,第一压力传感器可以被配置为检测右心室中的压力,而第二压力传感器可以被配置为检测右心房中的压力。对于另一个示例,第一压力传感器可以被配置为检测右心房中的压力,第二压力传感器可以被用于检测右下腔静脉中的压力。在一些示例中,第一压力传感器和第二压力传感器被配置为检测相邻腔中的压力(例如,被阀分开)。在一些示例中,第一和第二压力传感器可以更远离(例如,由多个阀分开)。
图54Di和54Dii示出了用于检测导管5452的移动的示例方法和系统。在图54Di中,导管5452处于传送配置。例如,如图54A中所示但是相对于本文所述或以其他方式而言的任何可扩张结构,由虚线X所示的可扩张结构锚固在右肺动脉5409中。替代地也可以在左肺动脉和/或肺干5410中进行锚固或定位。导管5452包括细长元件,该细长元件从可扩张结构延伸穿过肺干5410、肺动脉瓣5411、右心室5412、三尖瓣5413、右心房5414、腔静脉,并离开受试者(例如,通过颈静脉或股静脉)。导管5452包括位于右心室5412中的第一压力传感器5454。导管5452可选地包括位于肺干5410中的第二压力传感器5456。本文进一步详细描述单个传感器配置。例如,如关于图54A和54B所描述,压力传感器5454、5456可以包括Millar传感器或其他类型的压力传感器。
在图54Dii中,如由箭头5458所示,已向近端拉动导管5452。随着最初减小导管5452的细长构件中的松弛,可扩张结构保持锚固就位。如图54Dii中所示,这导致导管5452被拉动到三尖瓣5413的环带的旁侧。第一传感器5454保留在右心室5412中,但是与三尖瓣5413的小叶和腱索接触,这甚至在到达右心房5414之前就引起传感器信号的改变。如果导管5452进一步向近端缩回,则第一传感器5454被拉入右心房5414中,从而进一步改变传感器信号。如果导管5452进一步向近端缩回,则松弛将被吸收并且力可开始起作用以移出可扩张结构。相对于图54Di和图54Dii的第一传感器5454所描述的方法和系统甚至能够在可扩张结构移动并且刺激可能受到损害之前就提供导管5452的移动的早期警告或预警告。
可选的第二传感器5456保留在肺动脉干5410中。例如,如关于图54A至54C所述,第二传感器5456可以用于确认导管5452的移动(例如,由于可扩张结构变得不被锚固而移动,使得第二传感器5456移动通过肺动脉瓣5411)。
图54E在单个图中示出了用于检测导管5462的移动的示例方法和系统。导管5462以传送配置在腔静脉和肺干5410中以实线示出并且在右心室5412和右心房5414中以虚线示出,并且在拉动配置中始终以实线示出。与图54Di和54Dii的导管5452相比,导管5462包括一个传感器5464,该传感器被示出位于传送位置5464a和拉动位置5464b中。与图54Dii相比,导管5462已被拉出,使得拉动位置5464b位于右心房5414中。传感器5464在穿过三尖瓣5413时提供右心房压力信号,该信号不同于右心室压力信号和指示与三尖瓣5413的小叶和腱索接触的信号。关于图54E的传感器5464描述的方法和系统甚至能够在可扩张结构移动并且刺激可能会受到损害之前提供导管5462的移动的早期警告或预警告。
图55是示例刺激系统5500的前视图。刺激系统5500包括壳体5502、包括电连接器5506的导管连接器5504、显示器5508和输入5510。壳体5502能够包含刺激电子器件,该刺激电子器件包括用于电极刺激的开关矩阵。在一些示例中,刺激矩阵的最小输出是25mA、达至8ms和100Hz。其他最小值、最大值和指定的参数(例如,极数、脉冲模式、振幅、相位、电压、持续时间、脉冲间间隔、占空比、驻留时间、序列、波形等)也是可行的。计算装置备5520(例如,联网的计算机终端、台式机、膝上型计算机、平板电脑、智能手机、智能手表等)可以经由有线或无线系统通信地耦接到刺激系统5500。在一些示例中,平板电脑可以经由USB连接5522(例如,如图55中所示)连接到刺激系统5500。计算装置5520可以包括提供图形用户界面的显示器,该图形用户界面被配置为设置刺激参数、呈现传感器数据、查看波形、存储数据等。计算装置5520可以联网到其他计算装置、网络、因特网(例如,通过安全的符合HIPAA的协议)等。再次参照考图54A,电连接器5506可以被配置为与来自压力传感器(例如,两个压力传感器)的电连接器接口。电连接器5506可以被配置为与来自ECG导联(例如,来自皮肤ECG贴片的三个导联)的电连接器接口。电连接器5506可以被配置为与来自传感器的电连接器接口,该传感器被配置为提供可用于收缩性测量的数据。刺激系统5500、计算装置5520和/或另一计算装置可以被配置为使用该数据以提供收缩性测量。刺激系统5500可以包括不用于连接到当前导管但是能够提供更新系统以用于未来开发的能力的附加电连接器。刺激系统5500、计算装置5520和/或另一计算装置可以包括用于刺激和/或感测的嵌入式程序。刺激系统5500、计算装置5520和/或另一计算装置可以包括安全警报,该安全警报被配置为在刺激系统5500、计算装置5520和/或另一计算装置处向用户警告警报事件。在一些示例中,第三压力传感器可以提供确认(例如,检测到第二压力传感器5306从右心室5312移动到右心房中)。
图57A是导管系统5700的示例的透视图。系统5700包括被配置为保持在受试者体外的近端部分5702和被配置为插入受试者的脉管系统中的远端部分5704。远端部分5704包括可扩张结构5720。系统5700包括外部护套5706、在外部护套5706的径向内侧的细长内部构件5708。系统5700可以包括在内部构件5708的径向内侧的轴5703。内部构件5708可以包括导丝内腔,例如用于允许在导丝上跟踪系统5700。轴5703可以包括导丝内腔,例如用于允许在导丝上跟踪系统5700。外部护套5706和内部构件5708可以在近端5702处耦接。
近端部分5702可以包括手柄和致动机构,例如以使外部护套5706相对于内部构件5708移动。为了部署可扩张结构,可以在保持内部构件5708固定的同时使外部护套5706缩回,可以在外部护套5706保持静止的同时使内部构件5708前进,和/或可以在使内部构件5708前进的同时使外部护套5706缩回。为了使可扩张结构5720塌缩,可以在内部构件5708保持固定的同时使外部护套5706前进,可以在外部护套5706保持固定的同时使内部构件5708缩回,和/或可以在内部构件5708缩回的同时使外部护套5706前进。近端部分5702可以包括手柄和致动机构,例如以使外部护套5706相对于轴5703移动。近端部分5702可以包括手柄和致动机构,例如以使内部构件5708相对于轴5703移动。手柄可以包括锁定机构,例如如本文所述。
护套5706可以包括增强层,例如编织物、线圈、螺旋、其组合等。增强层可以提供列强度以捕获可扩张结构5720。护套5706的远端可以是无创伤的。例如,在部署可扩张结构5720之后,无创伤的护套5706的远端能够减少或防止护套5706与脉管系统之间的相互作用造成的伤害。在一些示例中,护套5706的远端可以在治疗期间选择性地定位或搁置在脉管系统的一部分中。例如,护套5706的远端可以位于右肺动脉、左肺动脉、肺干、右心室、右心房、上腔静脉或适当的其他位置中。例如,如果护套包括压力传感器,则护套5706的远端的位置可以使得压力传感器定位在期望的体腔(例如,右肺动脉、左肺动脉、肺躯干、右心室、右心房、上腔静脉或其他适当位置)中。相反,盐水、肝素和/或其他流体可以例如靠近可扩张结构5720通过护套5706注入。可以通过护套5706抽取血液,例如以在护套5706的远端的位置处抽样血液特性(例如SpO2)。优选地,护套5706的移动不赋予可扩张结构5720。
护套5706可以包括不透射线标记5707。不透射线标记5707可以包括例如弧形带。
近端部分5702可以包括适配器,该适配器包括多个端口,例如第一Y适配器端口和第二Y适配器端口。第一Y适配器端口可以与被配置为允许导丝插入穿过系统5700的内腔连通。第二Y适配器端口可以包括电子器件连接器,该电子器件连接器可以用于将系统5700的电极矩阵耦接到刺激系统。
图57B是处于扩张状态下的导管系统5700的示例性扩张结构5720的侧视图。可扩张结构5720包括近端部分5722和远端部分5724。可扩张结构5720包括多根丝线5726和多个电极组件5730。
图57C是处于扩张状态下且没有电极组件5730的可扩张结构5720的侧视图。多根丝线5726中的每根在中间部分处弯曲以在可扩张结构5720的远端部分5724处形成屈曲部5728。在一些示例中,可扩张结构包括在远端部分5724处的环,例如,如美国专利号为7,018,401中所描述的,其通过引用全文并入本文。在一些示例中,可扩张结构5720的远端5724不包括任何耦接结构。在可扩张结构5720的端部处的屈曲部5728能够例如提供无创伤的端部。在可扩张结构5720的端部处的屈曲部5728能够例如抑制或防止在该端部处的断裂(例如,因为连续丝线比切割的支柱相交处或已经耦接在一起的丝线更不容易断裂)。可扩张结构5720可以没有从海波管切割下的支柱。可扩张结构5720可以由多根丝线5726组成或基本上由多根丝线5726组成(例如,还包括管5758等)。
多根丝线5724可以从屈曲部5728朝向近端部分5702缠织(例如,编织、编结和/或针织)。编织可以是例如一-一-一型的、一-二-一型的、一-二-二型的、二-二-二型的等。缠结的结构可以称为篮、支架、锚和/或或其他合适的术语。多根丝线5726可以包括例如一定数量的丝线5726,使得2倍数量的丝线端部朝向近端部分5722缠结。在一些示例中,该数量包括在4根丝线至24根丝线之间(例如,4根丝线、6根丝线、8根丝线、10根丝线、12根丝线、14根丝线、16根丝线、20根丝线、24根丝线、这些值之间的范围等)。在缠结一定纵向距离之后,成对的丝线5726t、5726c并排定位以耦接到电极组件5730。来自每个并排对5726t、5726c的一根丝线5726t终止于电极组件5730中。来自每个并排对5726t、5726c的另一根丝线5726c继续向电极组件5730的近端延伸。丝线5726c形成从可扩张结构5720的周边朝向纵向轴线5709延伸的辐条5728。与例如激光切割的结构相比,该编织结构可以提供更大的径向力。在可扩张结构5720的近似端部处的辐条5728能够例如提供无创伤的端部。在可扩张结构5720的端部处的辐条5728能够例如抑制或防止该端部处的断裂(例如,因为连续丝线比切割的支柱相交处或已经耦接在一起的丝线更不容易断裂)。丝线5726的耦接可以各自在护套或其他结构内,使得能够包含可能发生的任何断裂。
可扩张结构5720可以可选地包括不透射线标记5725,例如在可扩张结构5720的远端处或远端附近。当不透射线标记5725位于可扩张结构5720的远端处时,用户能够部分地部署可扩张结构5720,以在完全部署可扩张结构5720之前验证对准(例如,最下、最上)。尽管在图57B至57Dii中示出了一个不透射线标记5725,并且单个不透射线标记能够提供某些对准优势(例如,如本文所讨论),但是多个不透射线标记5725也是可行的。当可扩张结构包括多个不透射线标记5725时,不透射线标记5725中的至少一个可以包括与不透射线标记5725的至少一另个不同的特性(例如,形状、厚度、材料等)。例如,不同的特性能够允许至少一个不透射线标记5725被区分并用于对准。
图57Di是可扩张结构5720的端视图。图57Di示出了朝向中心纵向轴线5709延伸的辐条5728。图57Di还示出了电极组件5730仅在可扩张结构5720的圆周的部分上延伸。例如,电极组件5730可以位于包括纵向轴线5709的平面5711的一侧上。在一些示例中,电极组件5730耦接到周向上相邻的辐条5728。不透射线标记5725可以位于平面5711的与电极组件5730相对的一侧上(例如,如图57Di所示)。不透射线标记5725可以在周向上与电极组件5730的周向中点相对(例如,如图57Di所示)。不透射线标记5725可以帮助电极组件5730的旋转定位。例如,如果电极组件优选地相对于时钟在约11:00至约3:00之间周向地延伸,则可以将不透射线标记5725定位在约6:00处。电极5736可以充当不透射线标记。
图57Dii是类似于可扩张结构5720的另一示例可扩张结构的端视图,但是其中不透射线标记5725相对于电极组件5730和平面5711不同地定位。在图57Dii中所示的示例中,不透射线标记5725与最上部电极组件5730-1成约180°。知晓不透射线标记5725的位置及其与最上部电极组件5730成约180°的取向能够向用户提供以下信息:当不透射线标记处于下部位置时,其他电极组件5730在最上部电极组件5730的前面,这能够提供所有电极组件5730都在目标区域中(例如,前上部)的信息。在另一个示例中,不透射线标记5725与最上部电极组件5730成约0°。知晓不透射线标记5725的位置及其与最上部电极组件5730成约0°的取向能够向用户提供以下信息:当不透射线标记处于上部位置时,其他电极组件5730在最上部电极组件5730的前面,这能够提供所有电极组件5730都在目标区域中(例如,前上部)的信息。不透射线标记5725能够相对于电极组件5730以其他取向定位,以利用电极阵列瞄准特定的解剖结构。例如,在整个本公开内容中提供了在右肺动脉中的目标区域的示例(例如,参照图2D中的象限,应当理解,图57Di和57Dii是与图2D的远端视图相对的近端视图)。
丝线5726可以包括具有圆形横截面、弧形非圆形横截面(例如,卵形形、椭圆形等)、矩形横截面(例如,正方形)、梯形横截面及其组合等的细丝、丝线、带状物等。在一些示例中,一些丝线5726可以具有被配置为与电极组件5730、毂系统5750和/或其他部件的形状相互影响的横截面。丝线5726可以具有在约0.002英寸(近似0.051mm)至约0.02英寸(近似0.51mm)之间(例如约0.002英寸(近似0.051mm)、约0.004英寸(近似0.1mm)、约0.006英寸(近似0.15mm)、约0.008英寸(近似0.2mm)、约0.01英寸(近似0.25mm)、约0.012英寸(近似0.3mm)、约0.015英寸(近似0.38mm)、约0.02英寸(近似0.51mm)、在这些值之间的范围等)的直径或侧向横截面。在一些示例中,一些丝线5726可以具有不同的直径,例如被配置为与电极组件5730、系统5750和/或其他部件的尺寸相互影响。在一些示例中,随着辐条5728而延续的丝线端部可以具有相对较小的直径,例如以减少近端部分5722处的材料量。
丝线5726可以包括例如镍、钛、铬、钴及其合金、包括镍钛(例如镍钛合金)、铬钴等。丝线5726可以被热处理以赋予可扩张结构5720以形状记忆或超弹性。例如,可以对多根丝线5726进行热处理,使得可扩张结构5720在没有外力的情况下呈扩张形状(例如,如图57B中所示),并且能够塌缩到压缩或传送状态(例如,由于由外部护套5706施加的力)。丝线5726中的至少一根可以包括不透射线材料,例如具有不透射线的芯和形状记忆包层、耦接至形状记忆材料的不透射线标记、其组合等的拉制填充管。
在一些示例中,处于扩张状态下的可扩张结构5720的直径5721在约15mm至约45mm之间(例如,约15mm、约20mm、约22mm、约24mm、约26mm、约28mm、约35mm、约39mm、约43mm、约45mm、在这些值之间的范围等)。在一些示例中,对多根丝线5726进行热处理以使其自扩张,从而可扩张结构5720能够从用于导航到目标部位的压缩状态自扩张到用于在目标部位(例如,肺动脉(例如,右肺动脉、左肺动脉、肺干)、下腔静脉、上腔静脉、无名静脉等)处进行治疗的扩张状态或者朝向该扩张状态自扩张。在某些这样的示例中,处于扩张状态下的可扩张结构5720的直径可以被放大至大多数受试者的大多数预期脉管系统,以确保血管壁贴近。血管中的扩张状态可以小于完全扩张状态(例如,由于血管壁而没有任何径向向内的力)。在一些示例中,丝线5726可以是非自扩张的(例如,球囊扩张的,像具有丝线的伞一样扩张等)。可扩张结构5720能够用于各种尺寸的血管(例如,不同尺寸的右肺动脉),并且编织结构能够适应血管的尺寸而不会损害系统性能。例如,可扩张结构5720能够贴近血管壁并将电极组件抵靠血管壁推动直至完全扩张状态并包括在完全扩张状态中。
在一些示例中,可扩张结构5720可以是自扩张的,并且可以被进一步扩张(例如,利用丝线扩张,例如如本文所述的),其可以提供能够用于一系列血管、血管尺寸、壁贴近力等的可调节的可扩张结构5720的直径5721。其中在发生错误的情况下可扩张结构5720不贴近壁的示例对于安全性可能是有利的,例如如本文所述的。在可扩张结构5720扩张之后,电极组件5730的电极5736可以被选择性地激活,以用于测试神经捕获、校准和/或治疗,例如如本文所述的。
当编织多根丝线5726时,编织图案沿着可扩张结构5720的至少一部分可以是一致的。在一些示例中,编织图案可以从可扩张结构5720的远端到编织结构的近端是一致的(例如,围绕辐条5728的形成位置)。再次参照图57B,在一些示例中,在第一部段5740和第二部段5742之间的编织图案是不同的。例如,第一部段5740可以包括第一编结角5741,第二部段5742可以包括与第一编结角5741不同的第二编结角。第二编结角5743可以大于第一编结角5741(例如,如图57B中所示),其能够在包括至少一些电极5736的区域中提供更向外的径向力。第二编结角5743可以小于第一编结角5743,其能够在缺乏电极5736的区域中提供更向外的径向力以用于更多的壁贴近。可扩张结构5720可以包括具有变化特性的两个以上的部段。其他编织参数可以替换地或附加地在部段之间改变(例如,编结图案、每英寸的纬密、孔隙率、密度等)。
在一些示例中,部署可扩张结构5720包括以将处于塌缩状态下的可扩张结构5720前进到预期的目标位置的远端。可扩张结构5720可以朝向扩张位置扩张。可以测试电极5736的组合和参数。如果确定可扩张结构太远,则可扩张结构5720可向近端缩回而不会塌缩。该缩回可以使用一点力,但是与例如将处于扩张状态下的可扩张结构5720向远端前进和/或将可扩张结构5720重新包覆、重新定位可扩张结构5720、和重新部署可扩张结构5720相比,对脉管系统的伤害较小和/或对使用者更容易。
图57E是图57B的示例性可扩张结构5720的示例毂系统5750的近端和侧向透视图。图57F是图57E的示例毂系统5750的远端视图。毂系统5750包括外带5752、内带5754和适配器5756。在图57E中,外带5752被示出为透明的以增强清晰度。在图57E中,内部构件5708被省略以增强清晰度。内部构件5708耦接到外带5752。外带5752可以包括例如不透射线带。不透射线带能够帮助使用者识别可扩张结构5720的近端部分5722。外带5752可以包括例如完全弧形的环或部分弧形的环。适配器5756可以包含聚合物(例如,Pebax)。内带5754可以包括例如金属带。金属带能够适用于某些耦接方法(例如熔焊)。内带5754可以包括例如不透射线带。内带5754可以包括例如完全弧形的环或部分弧形的环。
靠近电极组件5730继续的丝线5726c位于外带5752的径向内侧。辐条5728转动,使得丝线5726c近似平行于毂系统5750延伸。适配器5756可以包括多个径向突起5755,径向突起5755至少部分地限定了多个内腔或通道5757,内腔或通道5757用于将丝线5726c插入其中。丝线5726c均位于至少部分地由适配器5756的径向突起5755之间的开口限定的内腔或通道5757中。外带5752可以至少部分地限定内腔5757。丝线5726c也位于内带5754的径向内侧。丝线5726c可以耦接至内带5754(例如,通过熔焊、钎焊、粘附、摩擦配合、其组合等)。内带5754可以靠近适配器5756的径向突起5755。适配器5756可以包括在内腔5753的径向内侧的中心内腔5751,例如以容纳导丝、轴5703(图57I)等。
图57G是可扩张结构5720的一部分和示例毂系统5750的一部分的近端和侧向透视图。为了清楚起见,未示出外带5752和内带5754。图57F示出了靠近适配器5756的粘合剂5760。粘合剂5760也靠近内带5754。在一些示例中,粘合剂5760可以与适配器5756和/或内带5754至少部分地纵向重叠。粘合剂将丝线5726c耦接至轴5703。粘合剂还能够抑制或防止流体进入内部构件5708。丝线5726c耦接至毂系统5750,该毂系统耦接至内部构件5708。这些耦接一起将可扩张结构5720耦接到内部构件5708和轴5703。在一些示例中(例如,省略粘合剂5760),可扩张结构5720可以耦接到内部构件5708并且能够相对于轴5703移动。粘合剂5760可以在可扩张结构5720和导管系统5700的靠近该可扩张结构的部分之间提供流密密封。
图57H是可扩张结构5720的一部分和示例毂系统5750的一部分的侧视图。图57G和57H示出了围绕每根丝线5726c的一部分的聚合物管5758。聚合物管5758可以包括例如热缩管(例如,包括PET)。聚合物管5758至少部分地包封一对丝线5726t、5726c,包括丝线5726t的近端。聚合物管5758能够减少或消除脉管系统暴露于丝线5726t的尖锐端部。聚合物管5758能够帮助耦接成对的丝线5726t、5726c以维持可扩张结构5720的形状。聚合物管5728可以延伸到适配器5756,例如使得辐条5728包括聚合物管5728。聚合物管可以例如增强抗血栓形成性,改善部署和/或重新包覆力(例如,增加抵抗外部护套5706的润滑性)。在一些示例中,可以在附接聚合物管5758之前将丝线5726成形。在一些示例中,可以在终止丝线5726t之前将丝线5726成形。
图57G和57H进一步示出了围绕从电极组件5730延伸的丝线5726c的聚合物管5759(如图所示,围绕从四个电极组件延伸的四根丝线5726c的四个聚合物管5759)。导体丝线5737(图57L和57M)在聚合物管5759的径向内侧延伸。聚合物管5759可以包括例如PTFE。丝线5726c的靠近聚合物管5759和近端管5758的部分可以被露出,例如用于熔焊或钎焊到内带5754。
图57I是在毂系统5750的内带5754的侧向截取的图57E的示例毂系统的截面图。图57I示出了丝线5726能够被夹设在内带5754和适配器5756的没有径向突起5755的近端部分之间。在一些示例中,丝线5726熔焊到内带5754。在一些示例中,内带5754、丝线5726和适配器5756形成摩擦配合。
图57J是图57E的示例毂系统的分解近端和侧向透视图。还示出了丝线5726的近端以供参考。外带5752的内径大于适配器5756(例如,包括径向突起5755)的外径。内带5754的外径大于适配器5756的不具有径向突起5755的部分的外径和两根丝线5726的直径的组合。径向突起5755的直径可以大于适配器5756的没有径向突起5755的部分的外径和两根丝线5726的直径的组合(例如,允许径向突起5755在丝线5726的径向外侧延伸)。外带5752的长度可以大于适配器5756的长度。内带5754的长度可以小于适配器5756的没有径向突起5755的部分的长度。其他毂也是可行的(例如,没有外带5752、内带5754和/或适配器5756中的一个或多个,或者完全具有不同的结构),或者毂可以完全被省略(例如,将丝线直接粘附到轴5703上)。
图57K是示例可扩张结构5720的示例电极组件5730的俯视平面图。图57L是示例电极组件5730的部分透明的远端和俯视透视图。可扩张结构5720包括四个电极组件5730,每个电极组件包括四个电极5736。其他数量的电极组件5730和其他数量的电极5736也是可行的。一些电极组件5730可以包括比其他电极组件5730更少的电极5736。一些电极组件可以与电极组件5730不同。
电极组件5730包括波状形状或狗骨头形状或山景形状。再次参照图57B,电极组件5730在纵向上偏移,使得当可扩张结构5720处于塌缩状态时,一个电极组件5730的电极部分能够嵌套在另一电极组件5730(例如,周向上相邻的电极组件5730)的侧向向内凹进或谷区域中,这能够向导管系统5700提供较小的传送轮廓。较宽的部分可以具有在约1mm至约5mm之间(例如,约1mm、约2mm、2.5mm、约3mm、约4mm、约5mm、在这些值之间的范围等)的宽度。较窄的部分可以具有在约0.25mm至约1.5mm之间(例如,约0.25mm、约0.5mm、约0.75mm、约1mm、约1.25mm、约1.5mm、在这些值之间的范围等)的宽度。在一些示例中,较宽部分与较窄部分之比在约3:1至约7:1之间(例如,约3:1、约4:1、约5:1、约6:1、在这些值之间的范围等)。
再次参照图57L,电极组件5730包括第一绝缘层5731、第二绝缘层5733、多个电极5736和多个导体5737。每个导体5737均电连接到一个电极5736。图57M是沿着图57L的线57M-57M截取的示例电极组件5730的截面图。图57M示出了导体5737径向向外旋转以连接至电极5736。其他连接机构也是可行的。例如,导体5737可以在连接部分中没有旋转。第一绝缘层5731和/或第二绝缘层5733可以包括例如聚氨酯、环氧树脂、丙烯酸粘合剂、聚对二甲苯、其组合等。
第一绝缘层5731和第二绝缘层5733的相对厚度可以互补以提供电极组件5730的厚度。在其中第二绝缘层5733相对较薄的一些示例中,第一绝缘层5731能够相对较厚。在某些这样的示例中,第二绝缘层5733可以提供用于电极5736的孔,而第一绝缘层5731提供用于安装电极5736的特征、用于导体5737的通道、用于耦接至丝线5726或支柱的特征等(例如,如相对于电极组件5730所描述的)。
在其中第二绝缘层5733相对较厚的一些示例中,第一绝缘层5731能够相对较薄。在某些这样的示例中,第二绝缘层5733可以提供用于电极5736的孔和用于安装电极5736的特征,而第一绝缘层5731提供用于导体5737的通道、用于耦接至丝线5726或支柱的特征等。
第二绝缘层5733在硬度方面可以不同于第一绝缘层5731,其能够改变柔韧性以帮助保持电极5736与纵向轴线对准。对于第二绝缘层5733使用较软的硬度对与第二绝缘层5733和/或电极5736接触的组织的创伤较小。对于第一绝缘层5731使用较硬的硬度可以提供更一致的制造,例如激光烧蚀以形成通道5734。对第一绝缘层5731使用较硬的硬度可提供刚度,以沿着电极组件5730在整个电极5736上均匀地分布径向力。
图57N是示例电极组件5730的局部剖开的近端和俯视透视图。在图57N中,已移除了第二绝缘层5733以及三个电极5736,为了说明目的,保留了最远端的电极5736。图57K和57N中的电极5736基本上是平面的,而图57L和57M中的电极5736是圆顶状的,如本文例如关于图58A至58Hiii另外详细描述的。
另外参照图57M,第一绝缘层5731包括通道5734。第一绝缘层5731的底部和侧壁形成U形通道5734。通道5734可以沿着第一绝缘层5731的长度延伸(例如,如图57N中所示)。通道5734可以终止于靠近最远端的电极5736的远端(例如,电极5736的远端、电极5736和导体5737的连接点的远端等)。导体5737位于通道5734中。通道5734的深度可以在约0.1mm至约1mm之间(例如,约0.1mm、约0.2mm、约0.3mm、约0.4mm、约0.5mm、约0.75 1mm、约1mm、在这些值之间的范围等)。通道5734的宽度可以在约0.25mm至约1.5mm之间(例如,约0.25mm、约0.5mm、约0.75mm、约1mm、约1.25mm、约1.5mm、在这些值之间的范围等)。
图57O是示例性电极组件5730的底部透视图。一对丝线5726t、5726c也位于通道5734中。丝线5726t、5726c经由孔5739从底部或第一绝缘层5731的径向内侧延伸到通道5734中。在一些示例中,丝线5726t、5726c能够经由第一绝缘层5731的侧面中的孔延伸到通道5734中。如本文所述,丝线5726t终止于电极组件5730中,并且丝线5726t继续变成辐条5728。丝线5726t的端部和丝线5726c的一部分覆盖有聚合物管5758。导体5737和丝线5726c延伸到聚合物管5759中(例如,靠近通道5734)。电极组件5730耦接到丝线5726的笔直部分。电极组件5730可以在通道5734的近端和远端处包括粘合剂或其他材料以密封通道5734。导体5737优选地被单独地绝缘。在一些示例中,导体5737可以是裸线。
再次参照图57M和57N,第一绝缘层5731还包括被配置成容纳电极5736的多个凹部5735。凹部5735允许电极组件5730具有低轮廓。电极5736还能够帮助将导体5737和丝线5726t、5726c保持在通道5734中。凹部5735的深度可以在约0.1mm至约1mm之间(例如,约0.1mm、约0.2mm、约0.3mm、约0.4mm、约0.5mm、约0.75mm、约1mm、在这些值之间的范围等)。第一绝缘层5731在凹部5735的周围的厚度可以在约0.5mm至约1.5mm之间(例如,约0.5mm、约0.75mm、约1mm、约1.25mm、约1.5mm、在这些值之间的范围等)。
第二绝缘层5733位于电极5736的上方或径向外侧。第二绝缘层5733可以可选地侧向重叠在电极5736的一部分上,使得电极5736的外表面的一部分被覆盖。重叠可以抑制或减小对电极5736的边缘的损坏。损坏的电极5736可以产生较高的电流密度,因此重叠能够抑制或减小较高的电流密度。电极5736的表面的暴露部分如本文所述提供刺激,并且利用第二绝缘层5733覆盖电极5736的表面(其具有更容易的制造公差)能够减少与电极5736的严格制造公差相关联的花费。重叠能够帮助密封电极组件5730。
图57K、57N和57O示出了电极组件5730,该电极组件5730包括可选的远端突片5738d和可选的近端突片5738p。突片5738d、5738p在具有很少的附加材料或体积的情况下能够在电极组件5730和丝线5726之间提供附加的相互作用,这在传送状态下可能是重要的。在一些示例中,突片5738d、5738p与第一绝缘层5731的底部一样厚(例如,在约0.025mm至约0.15mm之间(例如,约0.025mm、约0.05mm、约0.075mm、约0.1mm、约0.125mm、约0.15mm、在这些值之间的范围等))。再次参照图57B,电极组件5730的远端部段(例如,远端突片和在孔5739远端的一个或两个电极5736)在缠结丝线5726的径向外侧。在一些示例中,与靠近孔5739的近端部段(该近端部段包括丝线5726t、5726c的更具刚性的部分)相比,这些远端部段是悬臂式的。丝线5726的径向扩张力被配置成将电极5736保持抵靠在血管壁上。在一些示例中,当针对整个结构进行测试时,径向力可以在约10克至约200克之间(例如,约10克、约15克、约20克、约50克、约100克、约150克、约200克、在这些值之间的范围等)。沿着结构的某些点处的径向力可以变化(例如,包括电极的支柱可以比不具有电极的支柱具有更高的弯曲模量)。
在一些示例中,电极组件5730的至少一部分(例如,远端突片5738d)可以在交叉股线之下。将电极组件5730的至少一部分(例如,远端突片5738d)定位在交叉股线的下方能够帮助与电极组件5730的对准。将电极组件5730的至少一部分(例如,远端突片5738d)定位在交叉股线的下方能够减小电极组件5730的悬臂部分的移动。
图58A是示例电极组件5730的示例电极5736的俯视和侧向透视图。图58B是示例电极5736的俯视平面图。图58C是示例电极5736的侧视图。图58D是沿着图58B的线58D-58D截取的示例电极5736的截面图。电极5736的上表面5802是基本上平坦或平面的。电极5736包括第一突片5804和第二突片5806。第二突片5806包括孔5807。第一突片5804可以被配置为例如将导体5737耦接到电极5736。第二突片5806可以被配置为例如帮助将电极5736与第一绝缘层5731和/或第二绝缘层5733互锁。在一些示例中,突片中的一个或两个可以比电极5736的其他部分更薄和/或可以偏移。图58Ci示出了电极5736o的示例,在该电极5736o中,第一突片5804o变薄并且朝着电极5736o的底侧偏移,在该底侧处,电极5736o被配置成与导体5737相互作用,并且其中第二突片5806o变薄并朝着电极5736o的上侧偏移,在该上侧处,电极5736o被配置为与第二绝缘层5733相互作用。
图58E是图57K的示例电极组件的另一示例电极5810的截面图。除了上表面5802是圆形的或圆顶形的之外,电极5810包括与图58A的电极5736相同的特征。
图58Fi至58Fiv分别是示例电极组件5730的其他示例电极5812、5814、5816、5818的侧视图。电极5812、5814、5816、5818越来越呈圆顶状。例如,电极可以具有圆顶,该圆顶突出在主要部分上方约0.025mm至约0.5mm(例如,约0.025mm、约0.05mm、约0.075mm、约0.1mm、约0.15mm、约0.2mm、约0.25mm、约0.3mm、约0.4mm、约0.5mm、在这些值之间的范围等)。
圆顶形电极可以赋予略微的帐篷或将其推入血管壁中,这能够增加良好的血管壁接触的可能性。与血管壁的接触能够减少到目标神经的距离。在荧光检查中,可能会看到圆顶挺出,这能够用于验证组织接触。也可以使用或替代地使用阻抗测量。圆顶形电极可以减少血液在电极周围流动的可能性(例如,通过粘在血管壁上),这可能导致电流损失。没有电流损失可以减少由于腐蚀(例如诸如Pt/Ir的电极材料)而造成的潜在损失。在一些示例中,通过将圆周暴露于周围的电解质(血液),至少部分不与血管壁接触的圆顶电极可以产生较大的有效表面积,从而在物理电极周围产生虚拟电极。与平坦电极相比,圆顶形电极能够提供增加的表面积,同时仍具有相同的覆盖面积。与平坦电极相比,圆顶形电极可以具有减少的边缘效应。
平坦电极可以比圆顶形电极更容易制造和/或更廉价。平坦电极在电极组件的部署和/或重新捕获期间不太可能损坏。平坦电极不太可能会擦除或移除外部护套层,外部护套层的擦除和移除可能会损坏外部护套和/或对电极性能产生不利影响(例如,因为电极可以包含来自被擦除的外护套层的一些绝缘和/或导电材料)。
图58G是示例电极组件5730的示例电极子组件5830的俯视和侧向透视图。电极子组件5830包括电极5812和绝缘体5820。图58Hi至58Hiii分别是示例电极组件5730的其他示例电极子组件5830、5832、5834的侧向截面图。电极子组件5830的截面沿着图58G的线58Hi-58Hi截取。电极5812的上表面5802在绝缘体5820的上表面上方突出或挺出。在图58Hii中,电极5814的上表面5802与绝缘体5822的上表面具有相同的高度。电极5814与图58Hi的电极5812相比更具圆顶状,但是绝缘体5822比图58Hi的电极5820厚。在图58Hiii中,电极5816的上表面5802突出或挺出在绝缘体5824的上表面上方。电极5816比图58Hii的电极5814更具圆顶状,但是绝缘体5822与图58Hii的绝缘体5822一样厚。凹进的电极能够在整个电极表面上产生更均匀的电荷注入。在一些示例中,凹进的电极能够在整个电极表面上产生实际上理想的均匀场。凹进的电极能够减少边缘效应。例如,在孔的边缘处的高电流密度的区域可能不如在非凹进的电极中那样极端。凹进的电极可能比非凹进的电极产生更安全的刺激。
在绝缘材料的表面上方挺出的电极(例如,如在电极子组件5830中)能够提供本文中关于圆顶形电极所讨论的至少一些优点和/或其他优点。凹入绝缘层中的电极(例如,如在电极子组件5832中的电极)能够更具方向性,提供更均匀的电流密度,经受更一致的腐蚀和/或有助于减少磨损(例如,外部护套5706的磨损,这可能会对电极性能产生负面影响)。凹入导电材料中并在导电材料上方挺出的电极(例如,如在电极子组件5834中的电极)能够提供与在绝缘层的表面上方挺出的电极相关联的一些优点以及与凹入绝缘层中的电极相关联的一些优点。
图58E的电极5810的截面显示出电极5810是中空的。相反,电极子组件5830、5832、5834的电极5812、5814、5816的截面分别是实心的。中空电极5810可以更容易制造,例如通过冲压平坦金属片。圆顶形电极可以提供更大的表面积,并且可以更均匀地分布施加到电极的电流。在一些示例中,导体丝线可以耦接在圆顶部分的内部,这可以简化制造。在一些示例中,电极可以包括竖直偏移的突片以熔焊导体丝线(例如,类似于图58Ci中所示的突片2804、5806o)。在突片处耦接导体丝线能够有助于使连接点远离电极的活动部分移动,该连接点可以包含易于腐蚀的不同材料。
图59A是示例导管系统5700的示例内部构件5708的一部分的侧视图。内部构件5708的远端耦接到毂系统5750的外带5752。在其他示例中,内部构件5708的远端还可以或附加地耦接至轮毂系统5750的一个或多个其他部分,直接耦接至可扩张结构5720,或者可以相对于可扩张结构5720移动。
图59B是示例内部构件5708的一部分的透视图。图59C是示例内部构件5708的另一部分的透视图。内部构件5708包括第一端口5910和第二端口5912。压力传感器、例如图45B的示例压力传感器5420可以与端口5910、5912中的一个或两个流体连通。
如图59C所示,第一端口5910与第二端口5912在周向上间隔开距离5916。如果将内部构件5708压靠在闭塞端口5910、5912中的一个端口的血管壁上,则端口5910、5912中的另一个端口很可能不会被闭塞。在一些示例中,第一端口5910和第二端口5912可以至少部分地在周向上重叠。在一些示例中,第一端口5910和第二端口5912通常可以在周向上对准。例如,内部构件5708可以扭转和/或转动,使得如果内部构件5708被压靠在闭塞端口5910、5912中的一个端口的血管壁上,则端口5910、5912中的另一个端口很可能不会被闭塞。
在一些示例中,与端口5910、5912中的一个或两个流体连通的压力传感器被配置为用于感测导管系统5700的移动,例如,如本文关于图54A和54C、54Di和54Dii和/或54E所述的。端口5910、5912可以例如在导航期间由外部护套5706覆盖,并且在部署可扩张结构5720时未被覆盖。
内部构件5708可以包括靠近第一端口5910的不透射线标记5902。内部构件5708可以包括靠近第二端口5912的不透射线标记5904。不透射线标记5902、5904可以分别为用户提供端口5910、5912的近似纵向位置。不透射线标记5902、5904可以包括弧形带。在一些示例中,不透射线标记5902、5904可以包括旋转标记(例如,在弧形带中与端口5910、5912周向相关的间隙)。
图60A是示例导管系统6700的远端部分的一部分的透视图。远端部分包括轴5703和鼻锥6002。鼻锥6002可以包括内腔6004,例如导丝内腔,其允许系统6700在导丝上被跟踪,例如如关于图26E所描述的。鼻锥6002可以是无创伤的。鼻锥6002在前进期间可以基本上密封系统6700。在其中轴5703相对于可扩张结构6720可移动的一些示例中,在可扩张结构6720被部署之后,鼻锥6002可以向近端缩回。
如图60A中大致所示,当可扩张结构5720处于扩张状态时,鼻锥6002可以向可扩张结构5720的远端移动。例如,当鼻锥6002在右肺动脉中向下游行进时,可以具有约5mm的直径的鼻锥6002可以闭塞右肺动脉,该直径逐渐减小到小于5mm。
图60Bi是鼻部6052的另一示例的远端和侧向透视图。图60Bii是鼻部6052的远端视图。像鼻锥6002一样,鼻部6052耦接到轴5703或其他内部元件的远端,并且包括内腔6054(例如,用于在导丝上进行跟踪)。鼻部6052可以例如通过包覆成型、粘合剂和/或其他合适的方法耦接至轴5703。鼻部6052包括近端部段6062和远端部段6064。鼻部6052可以包括不透射线标记。在一些实现方式中,鼻部6052包括具有不透射线增透剂(radiopacifier)的聚合物。
远端部段6064包括至少部分地限定多个通道6067的多个突起6066。即使当鼻部6052贴近血管壁时,突起6066的厚度也足以形成通道6067。例如,如果鼻部6052的最宽直径是5mm,则突起6066可以是至少约0.5mm、至少约1mm或至少约1.5mm。对于另一个示例,突起6066可以是鼻部6052的最宽直径的至少约10%mm、至少约15%、至少约20%或至少约25%。即使当鼻部6052可以在周向上抵接血管,通道6067也提供流过鼻部6052的血流。也就是说,即使鼻部6052紧密地配合在小血管中,流体也可以流过通道6067,并且因此流过小血管以提供下游灌注。鼻部6052包括四个突起6066和四个通道6067,但是也可以是其他数量的突起6066和/或通道6067。例如,鼻部6052可以包括在一个突起至八个突起之间(例如,1个突起、2个突起、3个突起、4个突起、5个突起、6个突起、7个突起、8个突起、在这些值之间的范围等)。也可以是八个以上的突起。如果由此形成至少一个通道6067,则也可以是单个突起6066。
突起6066可以在周向上均匀地间隔开(例如,如图60Bi和60Bii中所示)。均匀的间隔能够例如适应各种血管。突起6066可以在周向上不均匀地间隔开(例如,聚集在鼻部6052的一侧上)。例如,能够为特定的解剖结构配置不均匀的间隔。通道6067可以比突起6066宽(例如,如图60Bi和60Bii中所示)。宽的通道6067能够例如为流体流动提供更大的区域。突起6066可以比通道6067宽。较宽的突起6066能够例如有助于限定通道6067。相对于通道6067突起6066越宽,突起6066可以越薄,以仍旧提供通道6067。突起6066可以包括与鼻部6052的半径平行的壁(例如,如图60Bii中所示)。平行于半径的壁可以为突起6066的给定厚度提供最大的偏移量和可能的通道6067的产生。突起6066可以包括与鼻部6052的半径成一定角度的壁。成角度的壁例如可以有助于在壁的径向内侧形成通道6067。
图60Biii是包括鼻部6052的系统的示例远端的透视图。图60Biv是包括鼻部6052的系统的示例远端的远端和侧向透视图。鼻部6052的近端部段6062旨在捕获可扩张结构5720的远端,从而使整个系统更好地响应在外部护套5706上的扭矩输入。否则,如果外部护套6706旋转,则内部部件(例如,可扩张结构5720)可能打滑和/或响应滞后。供鼻部6052耦接的轴5703、内部元件等处于缩回状态下,例如用于导航到目标部位。在导航期间,当系统横越例如心房和心室时,突起6066继续保护外部护套5706的远端末端免于刺入心肌。鼻部6052也可以是其他设计,例如包括内腔、孔、螺旋和提供流体流过鼻部6052的其他元件。
图61A是示例可扩张结构5720的另一示例电极组件6100的仰视和近端透视图。图61B是示例电极组件6100的仰视和远端透视图。与其中两根丝线5726c、5726t通过第一绝缘层5731的侧面和/或底部中的孔5739进入通道5734的电极组件5730相比,两根丝线5726c、5726t耦接到夹6102、6104。在一些示例中,丝线5726c、5726t可以以抑制或防止纵向移动的方式熔焊或以其他方式耦接至夹6102、6104。夹6102、6104可以相同或不同。例如,如图61B中最佳所示的,夹6102可以被配置成容纳一根丝线5726c,并且夹6104可以被配置成容纳两根丝线5726c、526t。夹6102、6104可以至少部分地延伸到通道5734中(例如,如图61A中所示),或者可以在通道5734的内部和/或侧面。
电极组件6100可以减小通道5734的深度,例如,因为丝线5726c、5726t不会延伸穿过通道5734。电极组件6100例如通过丝线5726c,5726t的厚度和导体5737的厚度之差可以增加可扩张结构5720的整体厚度。电极组件6100比电极组件5730更容易组装,例如,这是因为丝线5726c、5726t能够被卡合就位,而不是被穿入通道5734中。
为了测量ECG,护士、护理人员或其他从业人员可以在受试者身上放置多个粘性电极垫。在一些示例中,使用四个、六个、十个或十二个电极垫。其他数量的导联或垫也是可行的。例如,在12导联系统中,能够在每个肢体(在右肩和右肘之间的任何位置的右臂、在右躯干和右脚踝之间的任何位置的右腿、在左肩和左肘之间的任何位置的左臂以及在左躯干和左脚踝之间的任何位置的左腿)上放置一个电极垫,将第一电极垫放置在右胸骨的第四肋间隙上,将第二电极垫放置在左胸骨的第四肋间隙上,将第三电极垫放置在锁骨中线的第五肋间隙处,将第四电极垫放置在第二电极垫和第三电极垫之间的中部,将第五电极垫放置在腋前线上与第三电极垫相同的水平线上,并且将第六电极垫放置在腋中线上与第三和第五电极垫相同的水平线上。每个电极垫可以用作正电极、负电极和/或接地电极,以与其他电极垫的其他电极组合使用。导联可以被卡合到电极垫上或以其他方式耦接到电极垫上。在一些示例中,导联可以与电极垫集成在一起。ECG电极垫和ECG导联能够进行颜色编码、标记和/或包括被配置为减少放置和连接中的错误的其他标记。例如,第一电极垫可以是红色的并且包括标记“V1”以待连接到标记为“V1”的红色导联,第二电极垫可以是黄色的并且包括标记“V2”以待连接到标记为“V2”的黄色导联等。ECG导联的另一端可以连接到ECG系统。
再次参照图47I,ECG导联4730的端部可以耦接到受试者上的电极垫,并且ECG导联4730的另一端部可以直接连接到ECG系统4704以进行正常的ECG操作(例如,不与滤波器组件4732相互作用)。为了包括滤波器组件4732,ECG导联4730的端部可以耦接至受试者上的电极垫,并且ECG导联4730的另一端部可以连接至滤波器组件4732,该滤波器组件4732可以连接至ECG系统4704。滤波器组件4732可能会对某些用户造成困惑,因此使用相同或相似的颜色编码和/或其他标记可以促进滤波器组件4732的准确使用。
图61Ci是另一个示例电极组件6110的俯视、侧向和近端透视图。图61Cii是示例电极组件6110的背面、侧向和近端透视图。电极组件6110可具有与本文所述的其他电极组件(例如,电极组件5730、6100)相同的特征,并且可以具有一些不同的、附加的和/或更少的特征。例如,电极组件6110包括下绝缘体6111、上绝缘体6113和电极6116。
与下绝缘体5731一样,下绝缘体6111包括通道。上绝缘体6113也包括通道。下绝缘体6111和上绝缘体6113的通道一起形成内腔6114。电导体能够耦接到相应的电极6116并且定位在内腔6114中。内腔6114可以具有敞开的近端(例如,如图61Ci和61Cii中所示)和封闭的远端。这样的配置可以例如通过仅在耦接导电线、附接至可扩张结构等之后密封一个端部来简化制造。内腔6114可以具有敞开的近端(例如,如图61Ci和61Cii中所示)和敞开的远端。这种配置可以例如通过允许下绝缘体6111和上绝缘体在任一纵向方向上使用来简化制造。
在一些实现方式中,电极组件6110包括远端突片(例如,与远端突片5738d一样)。远端突片能够帮助抑制或防止电极组件6110的远端突出穿过可扩张结构的敞开单元区域。在一些实现方式中,远端突片的长度比处于完全扩张位置的单元的纵向长度大至少约10%、大至少约25%、大至少约50%、大至少约75%、大至少约100%、或甚至更大。远端突片不应向远端突出超出可扩张结构。远端突片可以突出小于约五个、小于约四个、小于约三个、小于约两个等的单元长度,并且大于一个单元长度。电极组件6110和/或电极组件6110的一个或多个部分可以以向上或向外弯曲的方式退火。这样的退火可以使远端突片远离可扩张结构偏压,从而减小电极组件6110穿过可扩张结构突出的风险。
图61Ciii是示例上绝缘体6113和示例电极组件6110的示例电极6116的底部平面图。在一些实现方式中,例如沿着相对于上绝缘体5733讨论的线,上绝缘体6113可以省略通道6115和/或凹部6117,从而留下用于电极6116的上表面的孔。在某些这样的实现方式中,下绝缘体6111能够包括内腔6114和/或凹部6117。如果上绝缘体6113太薄,则制造可能变得困难,例如这是因为可能在薄的点处(例如,靠近电极孔)发生撕裂。在一些实施方式中,上绝缘体的厚度在约0.006英寸(接收0.15mm)至约0.012英寸(大约0.3mm)之间(例如,约0.006英寸(近似0.15mm)、约0.007英寸(近似0.18mm)、约0.008英寸(约0.2mm)、约0.009英寸(近似0.23mm)、约0.01英寸(近似0.25mm)、约0.011英寸(近似0.28mm)、约0.012英寸(近似0.3mm)、在这些值之间的范围等)。不同的材料可以具有不同的可制造厚度范围。如上所讨论的,上绝缘体6113包括至少部分地限定内腔6114的通道6115。上绝缘体6113包括被配置为接收电极6116的凹部6117。包括一些特征的上绝缘体6113和包括一些特征的下绝缘体6111能够增加上绝缘体6113的厚度,从而降低制造期间撕裂或其他缺陷的风险。
图61Civ是耦接到可扩张结构5720的多个示例电极组件6100的侧视图。图61Cii示出了下绝缘体6111包括第一孔6112p和第二孔6112d。第二孔6112d在第一孔6112p的远端。当电极组件6110耦接至可扩张结构(例如,可扩张结构5720)时,可扩张结构的细丝(例如,丝线5726c、5726t)能够通过孔6112p、6112d中的一个孔进入内腔6114。细丝能够在近端延伸并与导体一起离开内腔6114。
图61Cv是处于用于耦接到可扩张结构的示例对准中的多个示例电极组件6110的底部平面图。电极组件6110a和6110c的第一孔6112p与电极组件6110b和6110d的第二孔6112d纵向对准。孔6112p、6112d被配置(例如,定尺寸、定位)为使得当可扩张结构处于塌缩状态时,电极组件6110a-6110d能够嵌套。嵌套或错开或偏移的电极组件6110能够提供在较小的空间中更紧密地包装更多的电极组件6110。嵌套的或交错的或偏移的电极组件6110能够减小传送直径,以通过小血管和/或围绕曲折的屈曲部导航。图61Civ示出了当可扩张结构处于扩张状态时,电极组件6110保持在错开的纵向位置。
图61Di是示例电极6116的俯视图。电极6116具有包括两个半圆6120的长圆形状,该两个半圆6120通过与半圆6120的端点相切的平行线连接,从而形成矩形截面6122。长圆形状可以被称为矩形圆盘(discorectangular)或香肠形。当期望不宽的电极(例如,以减小周向厚度,诸如用于导管中的压紧)时,长圆形状能够提供比圆形形状更大的表面积。长圆形状能够提供与圆形电极相同或相似的电流密度。在一些实现方式中,矩形部分6122的长度与半圆形部分6120的直径相同,从而使矩形部分6122为正方形。在一些实现方式中,矩形部分6122的长度小于半圆形部分6120的直径,使得矩形部分6122为长度小于宽度的矩形。在一些实现方式中,矩形部分6122的长度大于半圆形部分6120的直径,使得矩形部分6122为长度大于宽度的矩形。矩形部分6122的长度与半圆形部分6120的直径之比能够在约1:3至约3:1之间(例如,约1:3、约1:2、约1:1.5、约1:1.25、约1:1、约1.25:1、约1.5:1、约2:1、约3:1、在这些值之间的范围等)。影响该比率的因素能够包括例如期望的表面积、期望的电极宽度、电极之间的间隔、电极组件之间的间隔等。在一些实现方式中,电极6116的表面积与直径在约0.5mm至约3mm之间(例如,约0.5mm、约1mm、约1.5mm、约2mm、约2.5mm、约3mm、在这些值之间的范围等)的圆形电极相同。电极6116还包括近端和远端突片6124。能够提供与圆形电极相同或相似的较薄电极和电流密度的其他形状也是可行的。例如,图61Dii是具有卵形形状或椭圆形形状6128的另一个示例电极6126的俯视平面图。电极6126还包括近端和远端突片6124。
如相对于图58Ci所示和所述的,突片6124能够与电极6116、6126的主体成一体但比其薄。例如,突片6124的厚度能够是电极6116、6126的主体的厚度的约1/4至约3/4之间(例如,约1/4、约1/3、约1/2、约2/3、约3/4、在这些值之间的范围等)。尽管图58Ci示出了第一突片5804o和第二突片5806o从相对的上表面和下表面延伸,但是突片6124均能够从下表面延伸。使突片6124向电极6116、6126的下表面偏移能够减小在操作期间接合区域可以在电极6116、6126上具有的电效应。在一些实现方式中,导体丝线被耦接(例如,熔焊、钎焊等)到远端突片6124(例如,远端突片6124的底表面),并且导体沿着靠近连接点的电极的长度延伸。这样的连接器在制造期间不太容易损坏。将导体耦接到突片6124的底表面还能够或能够附加地减小在操作期间接合区域可以在电极6116、6126上具有的电效应。不用于耦接到导体的突片6124能够帮助将电极6116、6126夹设在上绝缘体和下绝缘体之间。长圆形电极6116和/或卵形电极6126的特征还能够与本文所述的其他电极相同,反之亦然,包括但不限于在翼片中具有孔、被圆顶化、作为电极子组件的一部分等。
图61Ei是另一示例电极组件6130的俯视、侧向和近端透视图。图61Eii是示例电极组件6130的背面、侧向和远端透视图。图61Eiii是示例电极组件6130的俯视、侧向远端透视分解图。图61Eiv是电极组件6130的示例上绝缘体6133的俯视和侧向纵剖视图。图61Ev是示例上绝缘体6133的放大的俯视和侧向纵剖视图。图61Evi是电极组件6130的示例下绝缘体6131的俯视和侧向纵剖视图。图61Evii是电极组件6130的俯视和远端纵剖视图。图61Eviii是电极组件6130的展开的俯视和底部纵剖视图。电极组件6130可以与本文所述的其他电极组件(例如,电极组件5730、6100、6110)共享特征并且可以具有一些不同的、附加的和/或更少的特征。
下绝缘体6131包括管6134。管6134可以具有圆形横截面(例如,如图61Ei、61Eii、61Evii和61Eviii所示)。其他形状也是可行的。例如,该管可以是卵形的或长圆形的。管6134能够与下绝缘体6131成一体(例如,以单次成型)。一体管6134可以提供更容易的单件制造,可以在部件之间提供更好的结合等。能够将管6134形成为与下绝缘体6131分开然后耦接至下绝缘体6131(例如,通过结合、通过两次式模具等)。分离的管6134可以提供不同材料的更容易使用、具有不同硬度的材料、其中一个部件更容易修改等。尽管示出为相对较短,但是管6134可以延伸到可扩张结构的辐条或延伸到可扩张结构的辐条的近侧。下绝缘体可以包括从管6134向远端延伸的凸块(例如,如图61Ei所示),例如以提供从近端到远端到电极组件6130的较宽部分的更好的过渡。
类似于下绝缘体5731,下绝缘体6131包括通道6139,在图61Eiii、61Evi、61Evii和61Eviii中最佳可见的。上绝缘体6133不包括通道,但是如果需要可以包括通道。可以将电导体耦接到相应的电极6136并定位在通道6139中。上绝缘体6133包括用于电极突片的凹部6141。上绝缘体6133包括用于暴露电极6136的上表面的孔6143。因此,上绝缘体6133具有比上绝缘体5733更多的特征,但是具有比上绝缘体6113更少的特征。
通道6139可以具有闭合的远端(例如,如图61Eiii、61Evi和61Evii中所示)。通道6139可以具有经由孔6137(例如,如图61Evi、61Evii和61Eviii中所示)与管6134的内腔6135流体连通的封闭近端。导体能够连接至电极6136(例如,如本文所述,连接至远端突片的底部),延伸穿过通道6139,并经由孔6137延伸至内腔6135中。然后,导体能够延伸到管6134的近端之外。通道6139能够例如填充有粘合剂,以抑制或防止流体进入和/或结合上绝缘体6133和下绝缘体6131。上绝缘体6133和下绝缘体6131可以使用例如加热的工具一起回流,这能够增强和/或进一步增强结合,以抑制或防止流体进入通道6139中。图61Eviii示出了导体6138,该导体6138耦接至最接近的电极6136,该导体6138延伸穿过通道6136,穿过孔6137而进入内腔6135中,并且延伸到管6134的近端之外。在一些实现方式中,通道6139可以具有敞开的近端(例如,像内腔6114一样),并且管6134可以包括靠近通道6139的近端的孔,从而导体能够离开通道6139的近端,延伸穿过管6134中的孔而进入管6134中,然后延伸到管的近端之外。这样的实现方式可以更容易制造,特别是对于两件式下绝缘体6133而言,但是使用更多的最终组件,例如以闭塞通道6139的近端和孔。
当电极组件6130耦接至可扩张结构(例如,可扩张结构5720)时,可扩张结构的细丝(例如,丝线5726c、5726t)能够通过内腔6135的远端进入内腔6135。已经发现,以这种方式将电极组件6130滑动到可扩张结构上,以使得比例如侧孔、底部孔等更容易制造。当耦接丝线5726c、5726t并且将丝线5726t截断时,例如如本文所述,丝线5726c、5726t的耦接部分和丝线5726t的近端能够定位在管6134中。如果耦接失败,则管6134能够提供安全性的层,使得丝线5726t将难以离开管6134并损害受试者的脉管系统。
图61Eix是耦接至示例可扩张结构5720的多个示例电极组件6130的近端透视图。例如,如本文所述,也可以耦接至其他可扩张结构。将电极组件6130在细丝或支柱的近端上滑动能够允许电极阵列具有各种尺寸形状(例如,在正交视图中)或配置,诸如矩形、平行四边形(例如,如图61Eix中所示)、错开的(例如,如图57B和图61Cv中所示),而对于电极阵列的每个电极组件6130使用相同或基本上相同的电极组件6130。在平行四边形布置中,对于每个周向上相邻的电极组件6130,内腔6135的远端定位在更远端。在一些实现方式中,细丝5726t可以在其中细丝5726t的近端位于相应的电极组件6130的管6134中的位置处被截断。在一些实现方式中,对于在可扩张结构5720上更远端地定位的电极组件6130,靠近上绝缘体6133的管6134的长度可以更长。平行四边形可以比具有不同形状的电极阵列更容易捕获。例如,在矩形电极阵列中,最近端设置的电极组件在被重新捕获在外部护套中时可以束紧。以平行四边形错开电极组件可以允许每个电极组件有更多移动,以在重新捕获期间找到较低的能量状态。可以基于相似或相同的部件之间的精确间距来考虑平行四边形的形状或布置(例如,每个电极组件的近端(例如,没有近端突片、最近端的电极))位于周向上相邻的电极组件的近端的远侧,并且其中每个电极组件的远端(例如,没有远端突片、最远端的电极)位于周向上相邻电极组件的远端的远侧)。可以基于整体形状来考虑平行四边形的形状或布置,例如围绕电极阵列和/或作为整体的多个电极绘制粗略的轮廓。本文所述的其他电极阵列和可扩张结构也可以采用任何合适的形状。
右肺动脉通常从前到后成一定角度,这意味着在其行进到受试者的右侧时朝向后部。呈矩形配置的电极阵列的前电极在右肺动脉中部署得更靠近受试者的右侧,这可能距离目标区域更远。图61Ex示出了位于血管6140(例如,右肺动脉)中的图61Eix的可扩张结构和多个示例电极组件。当具有平行四边形配置的电极阵列被部署在靠近目标部位旋转的诸如右肺动脉的血管中时,平行四边形能够起作用和/或表现为更竖直,以更好地填充目标区域。成形为平行四边形的电极阵列可以包括多个电极组件,每个电极组件均具有线性电极阵列。
处于扩张状态下的最远端电极5736-1也是处于压缩或塌缩状态下且处于部分扩张状态下的最远端电极。最远端电极5736-1能够用于使可扩张结构5720和/或电极组件5730在纵向上和/或旋转地对准。在一些示例中,最远端电极5736-1在血管6140(例如右肺动脉)中位于上方。最远端电极5736-1能够用作不透射线标记(例如,作为不透射线标记5725的补充或替代不透射线标记5725)。知晓最远端电极5736-1的位置及其与最上部电极组件5730-1的0°取向能够向用户提供当最远端电极5736-1处于上部位置时其他电极组件5730位于最上部电极组件5730-1的前面的信息,其能够提供所有电极组件5730都在目标区域中(例如,前上部)的信息。在一些示例中,可扩张结构5720可以在初始对准之后旋转,使得电极组件旋转。例如,在使用最远端电极5736-1进行上部对准之后,可扩张结构5720可以在约5°至约85°之间(例如,约5°、约15°、约25°、约35°、约45°、约55°、约65°、约75°、约85°、以及在这样的角度之间的范围)旋转。旋转可以是顺时针或逆时针。该旋转能够帮助提供电极组件5730在目标区域中的改善的或最佳的位置。在一些示例中,最远端电极5736-1能够与气管隆凸在纵向上对准,气管隆凸是主支气管的左右分支或气管的左边缘(例如,如关于图2F所讨论的)。如果期望可扩张结构5720和/或电极组件5730的重新定位,则用户能够将最远端电极5736-1用作基准(例如,保存幻影荧光检查视图)并调整到第二位置。
例如,例如如图61F所示,如果血管相对于可扩张结构尺寸过小和/或可扩张结构相对于血管尺寸过大,则近端样条从辐条向内弯曲,然后朝编织部分向外弯曲。电极组件通常遵循该曲率,使得其中一个电极6136-3可以在电极6136-2和6136-4(以及电极6136-1,未示出)的径向内侧。如图61Fii中所示,增加底部绝缘体的厚度和/或硬度能够使该弯曲区域变硬并且使电极6136-3与血管壁之间的壁接触更好。图61Fii示出了在大约相同的径向位置处的所有四个电极6136-1、6136-2、6136-3、6136-4。在不受任何特定理论的束缚的情况下,认为电极组件的较硬的下绝缘体较不易弯曲和拉直丝线5726c。在一些实现方式中,硬度在约55D至约63D之间(例如,约55D、约57D、约59D、约61D、约63D、在这些值之间的范围等)。在一些实现方式中,厚度在约0.004英寸(近似0.1mm)至约0.012英寸(近似0.3mm)之间(例如,约0.004英寸(近似0.1mm)、约0.006英寸(近似0.15mm)、约0.008英寸(近似0.2mm)、约0.01英寸(近似0.25mm)、约0.012英寸(近似0.3mm)、在这些值之间的范围等)。
图61Gi至61Giv示出了上绝缘体6133和下绝缘体6131的示意性侧视图或截面图。在图61Gi中,上绝缘体6133和下绝缘体6131两者都几乎没有斜角或没有斜角,这会产生尖锐的角部/或降低将电极组件包装到管(例如,导管的外部护套)中的能力。根据曲率半径,能够将倒圆或圆角边缘视为斜面。在图61Gii中,下绝缘体6131被斜切。在一些实现方式中,上绝缘体6133也被斜切或替代地被斜切。在图61Giii中,下绝缘体6131和上绝缘体6133都被斜切。斜角可以相同或不同(例如,以不同的角度)。在图61Giii中,下绝缘体6131和上绝缘体6133均被部分斜切。斜角可以相同或不同(例如,以不同的角度、具有不同的起点和终点等)。图示的斜角的组合也是可行的(例如,下绝缘体6131如图61Gii中那样被斜切,上绝缘体6133如图61Giv中那样被斜切,反之亦然,等等)。被斜切的上和/或下绝缘体能够减少负载,增加到管中的填充量和/或减少尖锐边缘可能造成的伤害。在一些实现方式中,对绝缘体进行斜切仍然围绕电极6136的所有部分提供至少约0.01英寸(近似0.25mm)的绝缘材料。
图62A示出了用于滤波器组件4732的示例壳体6200。壳体6200包括至少十个电极垫6202、6204、6206、6208、6210、6212、6214、6216、6218、6220。电极垫6202、6204、6206、6208、6210、6212、6214、6216、6218、6220进行了颜色编码并标记了字母和/或数字标记。电极垫6202是白色的并且标记为“RA”,并且被配置为连接到右臂导联。电极垫6204是绿色的并且标记为“RL”,并且被配置为连接到右腿导联。电极垫6206是黑色的并且标记为“LA”,并且被配置为连接到左臂导联。电极垫6208是红色的并且标记为“LL”,并且被配置为连接到左腿导联。电极垫6210是红色的并且标记为“V1”,并且被配置为连接到第一胸部导联。电极垫6212是黄色的并且标记为“V2”,并且被配置为连接到第二胸部导联。电极垫6214是绿色的并且标记为“V3”,并且被配置为连接到第三胸部导联。电极垫6216是蓝色的并且标记为“V4”,并且被配置为连接到第四胸部导联。电极垫6218是棕色或橙色并且标记为“V5”,并且被配置为连接到第五胸部导联。电极垫6220是紫色的并且标记为“V6”,并且被配置为连接到第六胸部导联。电极垫6202、6204、6206、6208、6210、6212、6214、6216、6218、6220处于可以匹配或模仿受试者身上的电极垫的位置的位置,使得用户将导联连接到电极垫6202、6204、6206、6208、6210、6212、6214、6216、6218、6220具有与将导联放置在受试者身上相似的体验。电极垫6202、6204、6206、6208可以位于模仿受试者的外围的电极垫的位置的位置。电极垫6210、6212、6214、6216、6218、6220可以在模仿受试者的胸部上的电极垫的位置的位置。壳体可以包括标记6222、6224,以指示电极垫6202、6204、6206、6208、6210、6212、6214、6216、6218、6220将被定位在受试者身上的何处。壳体6200能够基于熟悉的定位方法提供用户友好的界面。
滤波器组件4732可以包括用于耦接至受试者的ECG导联4730的输入。例如,壳体6200可以包括集成导联6226(例如,被配置为在一端耦接到受试者上的电极垫并且在另一端直接馈送入滤波器组件4732的导联)。对于另一个示例,壳体6200可以包括被配置为连接至ECG导联4730的凸形连接器的端部的凹形连接器6228。对于另一个示例,壳体6200可以包括被配置为连接至互补连接器的连接器端口6230,互补连接器耦接至ECG导联4730。在一些示例中,壳体可以包括连接器6226、6228、6230中的一个、两个或全部三个。用于ECG导联6730的其他连接器也是可行的。
其他颜色编码也是可行的。例如,图62B示出了用于滤波器组件4732的另一示例壳体6250。壳体6250包括电极垫6252、6254、6256、6258、6260、6262、6264、6266、6268、6270。电极垫6252、6254、6256、6258、6260、6262、6264、6266、6268、6270进行了颜色编码并标记了字母和/或数字标记。电极垫6252是红色的并且标记为“R”,并且被配置为连接到右臂导联。电极垫6254是黑色的并且标记为“N”,并且被配置为连接到右腿导联。电极垫6256是黄色的并且标记为“L”,并且被配置为连接到左臂导联。电极垫6258是绿色的并且标记为“F”,并且被配置为连接到左腿导联。电极垫6260是红色的并且标记为“C1”,并且被配置为连接到第一胸部导联。电极垫6262是黄色的并且标记为“C2”,并且被配置为连接到第二胸部导联。电极垫6264是绿色的并且标记为“C3”,并且被配置为连接到第三胸部导联。电极垫6266是棕色或橙色的并且标记为“C4”,并且被配置为连接到第四胸部导联。电极垫6268是黑色的并且标记为“C5”,并且被配置为连接到第五胸部导联。电极垫6270是紫色的并且标记为“C6”,并且被配置为连接到第六胸部导联。电极垫6252、6254、6256、6258、6260、6262、6264、6266、6268、6270处于可以匹配或模仿受试者身上电极垫的位置的位置,使得用户将导联连接到电极垫6252、6254、6256、6258、6260、6262、6264、6266、6268、6270具有与在受试者身上放置丝线相似的体验。壳体可以包括标记6272、6274,以指示如果在受试者上,则电极垫6252、6254、6256、6258、6260、6262、6264、6266、6268、6270将位于何处。壳体6250可以包括与连接器6226、6228、6230相对应的一个或多个连接器6276、6278、6280。壳体6250能够基于熟悉的定位方法提供用户友好的界面。
本文所述的某些程序可以在导管实验室的使用者和重症监护室或受试者的房间之间划分。导管实验室可以将装置部署在受试者体内。导管实验室可以执行治疗滴定(例如,确定最大可忍受的收缩性和/或松弛性增加的刺激参数,确定收缩性和/或松弛性增加的刺激参数大于最小值,确定收缩性和/或松弛性增加的刺激参数小于最大值,确定心率增加的刺激参数小于最大值等)。重症监护室和/或受试者的房间可以按照预先设定的参数进行治疗。重症监护室和/或受试者的房间可以监测治疗(例如,通过ECG、BP/MAP、SvO2、收缩性和/或松弛性的变化、压力的变化、心率等)。重症监护室和/或受试者的房间可以执行初始和/或后续(例如,根据需要)治疗滴定(例如,确定最大可忍受的收缩性和/或松弛性增加的刺激参数,确定收缩性的和/或/或松弛性增加刺激参数大于最小值,确定收缩性和/或松弛性增加的刺激参数小于最大值,确定心率的刺激参数小于最大值等)。重症监护室和/或受试者的房间可能会降低治疗速度。某些功能可以在适当的任何位置处执行。例如,可以由导管实验室进行后续的滴定治疗,这在建立刺激参数方面可能更有经验。
已经阐述了前述描述和例子,仅为了示出公开而并不旨在于限制。本公开的公开的方面和示例中的每个可以单独地考虑或者与本公开的其他方面、示例和变型组合考虑。此外,除非特别声明,否则本公开的方法的任何步骤都不限于任何特定的执行顺序。包括本公开的精神和实质的公开的示例的改型对于所属领域技术人员而言是可以想到的,并且这样的改型落于本公开的范围内。此外,本文所引用的所有参考文献通过援引整体并入。
虽然本文描述的方法和装置可以存在各种改型和替代形式,但是其特定例子在附图中已示出并且在本文中得到了详细描述。然而,应该理解,本发明并不限于所公开的特定形式或方法,相反,本发明将覆盖落在所描述的各个示例和所附权利要求书的精神和范围内的所有改型、等效物和替代物中。此外,与一个示例结合的任何特定特征、方面、方法、特性、性质、特质、属性、元素等的本文的公开可以用在本文阐述的所有其他示例中。本文公开的任何方法不需要按照记载的顺序执行。根据示例,本文所描述的算法、方法或者过程中任一个的一个或多个动作、事件或功能可以按照不同顺序执行,可以添加、合并在一起或者省略掉(例如,对于算法的实施而言,不是所有描述的动作或事件都是需要的)。在一些示例中,动作或者事件可以例如通过多线程处理、中断处理、或者多处理器或多处理器核或者在其他并行架构上同时执行,而不是顺序执行。此外,没有元件、特征、块或者步骤对于每个示例必须的或者必不可少的。此外,系统、方法、特征、元件、模块、块等的所有可能的组合、子组合和再布置落在本公开的范围内。除非另有声明或者在上下文中另有理解,否则诸如“然后”、“接着”、“之后”、“随后”等的顺序或者时间先后顺序的词语的使用通常旨在方便于文本的流畅,并不旨在限制执行的操作的顺序。因此,一些示例可以使用本文所描述的操作的顺序执行,而其他示例可以遵循不同的操作顺序执行。
与本文公开的示例结合描述的各种示出的逻辑功能块、模块、过程、方法和算法可以现实为电子硬件、计算机软件或者其组合。为了清楚地示出硬件和软件的可互换性,各种示出的部件、功能块、模块、操作和步骤在上面已经大致就其功能性来说进行了描述。这样的功能性是以硬件还是软件实施取决于特定应用和在整个系统上施加的设计约束。所描述的功能性对于每个具体应用可以用不同方式实施,但是这种实施决定不应该被理解成导致与本公开的范围的背离。
与本文所公开的示例结合描述的各种示出的逻辑块和模块可以通过机器实施或执行,所述机器例如通用处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)或者其他可编程逻辑器件、离散门或者晶体管逻辑、离散硬件部件或者设计成执行本文所描述的功能的其任何组合。通用处理器可以是微处理器,但是替代地,处理器可以是控制器、微控制器、状态机、其组合等。处理器还可以实施成计算装置的组合,例如,DSP和微处理器的组合、多个微处理器、与DSP核结合的一个或多个微处理器或者任何其他这样的配置。
与本文所公开的示例结合的所描述的方法、过程或算法的块、操作、步骤可以直接实施在硬件中、在处理器执行的软件模块中或者在二者的结合中。软件模块可以驻存在RAM存储器、闪存、ROM存储器、EPROM存储器、EEPROM存储器、寄存器、硬盘、可移动盘、光盘(例如,CD-ROM或DVD)或者本领域已知的任何其他形式的易失性或非易失性计算机可读存储介质中。存储介质可以耦接到处理器,以使得处理器可以从存储介质读取信息以及将信息写入到存储介质。替代地,存储介质可以集成到处理器。处理器核存储介质可以驻存在ASIC中。ASIC可以驻存在用户终端中。替代地,处理器和存储介质可以驻存为用户终端中的离散部件。
除非特别地另有声明,或者在上下文中另有理解,否则诸如特别是“能够”、“可能”、“可以”、“例如”等的本文中所使用的条件性用语通常旨在传达一些示例包括而其他示例不包括某些特征、元件和/或状态。因此,这样的条件性用语通常不旨在暗示特征、元件、块和/或状态对于一个或多个示例无论如何是需要的,或者一个或多个示例必须包括在有或没有作者输入或者提示的情况下决定这些特征、元件和/或状态是否被包括在任何具体示例中或者在任何具体示例中执行的逻辑。
本文中描述的方法可以包括实施人员采取的某些动作,然而,这些方法还可以明确地或者暗示性地包括这些动作的任何第三方指令。例如,诸如“定位电极”的动作包括“指示电极的定位”。
本文所公开的范围还包括任何以及所有的重叠、子范围及其组合。诸如“高达”、“至少”、“大于”、“小于”、“在......之间”等的用语包括记载的数字。诸如“约”或者“大约”的术语后的数字包括记载的数字,并且应该根据情况理解(例如,在各种情况下尽可能合理地准确,例如,±5%、±10%、±15%等)。例如,“约1V”包括“1V”。诸如“基本上”的术语后的措辞包括记载的短语,并且应该根据情况理解(例如,在各种情况下尽可能合理地多)。例如,“基本上垂直”包括“垂直”。除非另有声明,否则所有的测量在包括温度和压力的标准条件下。短语“至少一个”旨在要求后续列表中的至少一项,而不是后续列表中的每个项的一种类型。例如,“A、B和C中的至少一个”可以包括:A、B、C;A和B、A和C、B和C;或A、B和C。
Claims (48)
1.一种用于支撑电极阵列的部分编织的可扩张构件,所述可扩张构件在压缩状态和扩张状态之间自扩张,所述可扩张构件包括:
近端;
远端;
纵向轴线;
远端部段,该远端部段包括多根丝线,所述多根丝线中的每根丝线具有屈曲部,所述屈曲部在该屈曲部的每一侧上包括丝线部段,
所述屈曲部限定所述可扩张构件的所述远端,
所述丝线部段从所述可扩张构件的所述远端朝向所述可扩张构件的所述近端编织;和
靠近所述远端部段的近端部段,所述近端部段包括多根丝线,
所述多根丝线平行于所述纵向轴线延伸,
所述多根丝线中的一半丝线在所述可扩张构件的所述近端的远侧被截断,并且所述多根丝线中的另一半丝线限定所述可扩张构件的所述近端,
所述多根丝线中的所述另一半丝线朝向所述纵向轴线屈曲以形成辐条,并且平行于所述纵向轴线屈曲以附接到细长构件。
2.根据权利要求1所述的可扩张构件,其中,所述远端部段包括具有编结特性的第一部分和具有与所述第一编结特性不同的第二编结特性的第二部分。
3.根据权利要求2所述的可扩张构件,其中,所述第一编结特性包括编结角,并且所述第二编结特性包括编结角,并且其中,第二编结角大于第一编结角。
4.根据权利要求1所述的可扩张构件,其中,所述远端部段具有一致的编结角。
5.根据权利要求1所述的系统,其中,所述近端部段中的所述多根丝线的端部部分平行于所述纵向轴线以并排对定位。
6.根据权利要求5所述的系统,还包括覆盖每对并排丝线的至少一部分的聚合物管。
7.根据权利要求5所述的系统,其中,每对并排丝线的一个端部部分在所述可扩张构件的近端的远侧被截断,并且其中,每对并排丝线的另一个端部部分向近端轮毂系统径向向内延伸以形成辐条。
8.根据权利要求1所述的可扩张构件,其中,所述辐条垂直于所述纵向轴线。
9.一种导管系统,包括:
被配置为插入受试者的脉管系统中的远端部分,该远端部分包括:
根据权利要求1至8中任一项所述的可扩张构件;和
多个电极组件。
10.根据权利要求9所述的系统,其中,所述多根丝线中的所述另一半丝线延伸至近端毂系统。
11.根据权利要求10所述的系统,其中,所述近端毂系统包括:
外带;
在所述外带的径向内侧的内带;和
适配器,该适配器包括在所述外带的径向内侧的第一纵向部段和在所述内带的径向内侧的第二纵向部段,所述丝线的另一端部部分在所述内带的径向内侧。
12.根据权利要求10所述的系统,其中,所述近端毂系统包括:
金属外带;
在所述外带的内侧的聚合物适配器,并且该聚合物适配器包括:
远端部段,该远端部段包括多个径向突起,所述多个径向突起中的成对的径向突起之间的通道被配置成接收所述多根丝线中的所述另一半丝线中的一根丝线;和
在所述聚合物适配器的所述远端部段的近侧的近端部段,所述聚合物适配器的所述近端部段没有径向突起;
中心内腔,该中心内腔延伸穿过所述聚合物适配器的所述远端部段和所述聚合物适配器的所述近端部段;和
金属内带,该金属内带围绕所述聚合物适配器的所述近端部段并且在所述外带的内侧,在所述内带和所述聚合物适配器的所述近端部段之间的弧形空间被配置成接收所述多根丝线中的所述另一半丝线,所述内带或所述外带中的至少一个是不透射线的。
13.根据权利要求9所述的系统,还包括:
外部护套;和
在所述外部护套的径向内侧的内部构件,所述毂系统耦接到所述内部构件。
14.根据权利要求13所述的系统,其中,所述外部护套被配置成将所述可扩张构件保持在压缩状态。
15.根据权利要求14所述的系统,其中,所述可扩张构件被配置成在所述外部护套向所述内部构件的近端相对纵向移动时从所述压缩状态朝所述扩张状态扩张,并且其中,所述可扩张构件被配置成在所述外部护套向所述内部构件的远端相对纵向移动时朝向所述压缩状态压缩。
16.根据权利要求13所述的系统,其中,所述内部构件包括:
细长管,该细长管括围绕内腔的侧壁;
第一不透射线标记;
在所述第一不透射线标记的远侧的第二不透射线标记;
穿过所述侧壁的第一端口,所述第一端口靠近所述第一不透射线标记;和
穿过所述侧壁的第二端口,所述第二端口在所述第一端口的远侧,所述第二端口靠近所述第二不透射线标记,所述第二端口与所述第一端口在周向上间隔开,
该系统包括:
与所述第一端口流体连通的第一压力传感器;和
与所述第二端口流体连通的第二压力传感器。
17.根据权利要求9所述的系统,其中,所述多个电极组件中的每一个包括:
第一绝缘层;
第二绝缘层;
在所述第一绝缘层和所述第二绝缘层之间的多个电极;和
在所述第一绝缘层和所述多个电极之间的多个导体,所述多个导体中的每个导体电连接到所述多个电极中的一个电极。
18.根据权利要求17所述的系统,其中,所述第一绝缘层包括斜面。
19.根据权利要求17所述的系统,其中,所述第二绝缘层包括斜面。
20.根据权利要求17所述的系统,其中,所述第一绝缘层和所述第二绝缘层中的至少一个具有在55D至63D之间的肖氏硬度。
21.根据权利要求17所述的系统,其中,所述第一绝缘层和所述第二绝缘层的总厚度在0.004英寸(近似0.1mm)至0.012英寸(近似0.3mm)之间。
22.根据权利要求17所述的系统,其中,所述多个电极中的至少一个凹入所述第二绝缘层中。
23.根据权利要求17所述的系统,其中,所述多个电极中的至少一个是平坦的。
24.根据权利要求17所述的系统,其中,所述多个电极中的至少一个电极包括远端突片,所述远端突片在与所述电极的有源表面相对的一侧上耦接至导体。
25.根据权利要求17所述的系统,其中,所述多个电极中的至少一个包括长圆形状,所述长圆形状包括:
第一半圆形部分;
第二半圆形部分;和
在纵向上位于所述第一半圆形部分和所述第二半圆形部分之间的矩形部分。
26.根据权利要求25所述的系统,其中,所述矩形部分的长度与所述第一半圆形部分和所述第二半圆形部分的直径的比率在1:3至3:1之间。
27.根据权利要求9所述的系统,其中,所述多个电极在与所述可扩张构件的所述纵向轴线相交的平面的第一侧上。
28.根据权利要求27所述的系统,还包括在所述平面的第二侧上的不透射线标记。
29.根据权利要求9所述的系统,其中,所述多个电极组件中的每一个包括:
第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;
第二绝缘层,该第二绝缘层耦接至所述第一绝缘层,所述第一绝缘层和所述第二绝缘层形成与所述管流体连通的通道,该通道具有封闭的近端和封闭的远端;
在所述第一绝缘层和所述第二绝缘层之间的多个电极,所述多个电极中的每个电极具有长圆形形状,并且包括近端突片和远端突片;和
在所述通道中的多个导体,所述多个导体中的每个导体电连接到所述多个电极中的一个电极的远端突片的内侧。
30.根据权利要求9所述的系统,其中,当所述可扩张构件处于压缩状态时,所述多个电极组件在周向上嵌套。
31.根据权利要求9所述的系统,其中,当所述可扩张构件处于压缩状态时,所述多个电极组件成形为平行四边形。
32.根据权利要求9所述的系统,还包括位于所述可扩张构件的远侧的鼻部,所述鼻部包括:
远端部段,该远端部段包括至少部分地限定多个通道的多个突起;和
没有突起的近端部段。
33.一种电极组件,该电极组件被配置为耦接至可扩张结构并且施加电神经刺激;该电极组件包括:
第一绝缘层,该第一绝缘层包括具有敞开的近端和敞开的远端的管;
第二绝缘层,该第二绝缘层耦接至所述第一绝缘层,所述第一绝缘层和所述第二绝缘层形成与所述管流体连通的通道,该通道具有封闭的近端和封闭的远端;
在所述第一绝缘层和所述第二绝缘层之间的多个电极,所述多个电极中的每个电极具有长圆形状,并且包括近端突片和远端突片;和
在所述通道中的多个导体,所述多个导体中的每个导体电连接到所述多个电极中的一个电极的所述远端突片的内侧。
34.根据权利要求33所述的组件,其中,所述第一绝缘层包括斜面。
35.根据权利要求33所述的组件,其中,所述第二绝缘层包括斜面。
36.根据权利要求33所述的组件,其中,所述第一绝缘层和所述第二绝缘层中的至少一个具有在55D至63D之间的肖氏硬度。
37.根据权利要求33所述的组件,其中,所述第一绝缘层和所述第二绝缘层的总厚度在0.004英寸(近似0.1mm)至0.012英寸(近似0.3mm)之间。
38.根据权利要求33至37中任一项所述的系统,其中,所述多个电极中的至少一个电极包括远端突片,所述远端突片在与所述电极的有源表面相对的一侧上耦接至导体。
39.根据权利要求38所述的系统,其中,所述多个电极中的至少一个包括长圆形状,所述长圆形状包括:
第一半圆形部分;
第二半圆形部分;和
在纵向上在所述第一半圆形部分和所述第二半圆形部分之间的矩形部分。
40.根据权利要求39所述的系统,其中,所述矩形部分的长度与所述第一半圆形部分和所述第二半圆形部分的直径之比在1:3至3:1之间。
41.一种用于通过解剖血管施加神经刺激的系统,该系统包括:
外部护套;
细长内部构件,该内部构件在所述外部护套中并且能够相对于所述外部护套移动,所述内部构件具有远端;
可扩张构件,该可扩张构件耦接到所述内部构件的所述远端并且位于所述外部护套中,该可扩张构件从在所述外部护套中的压缩状态自扩张到在外部护套之外的扩张状态,该可扩张构件具有纵向轴线,并且该可扩张构件包括:
远端部分,该远端部分包括编织在一起以形成多个单元的多根丝线;和
在所述远端部分的近侧的近端部分,所述近端部分包括平行于所述纵向轴线延伸的多根丝线;和
多个电极组件,所述多个电极组件在所述可扩张构件的外部并围绕所述可扩张构件在周向上间隔开,所述多个电极组件中的每个电极组件耦接至平行于所述纵向轴线延伸的两根所述丝线,所述多个电极组件中的每个电极组件包括背离所述可扩张构件的多个纵向上间隔开的电极。
42.一种用于施加神经刺激的系统,该系统包括:
外部护套;
细长内部构件,该内部构件在所述外部护套中并且能够相对于所述外部护套移动;
可扩张构件,该可扩张构件耦接到所述内部构件,该可扩张构件从在所述外部护套中的压缩状态自扩张到在所述外部护套之外的扩张状态;和
多个电极组件,该多个电极组件在所述可扩张构件的外部并且围绕所述可扩张构件在周向上间隔开,所述多个电极组件中的每个电极组件具有近端和远端,所述多个电极组件形成平行四边形形状,其中,每个电极组件的近端在周向上相邻的电极组件的所述近端的远侧,并且其中,每个电极组件的远端在周向上相邻的电极组件的所述远端的远侧。
43.一种用于将多根细丝耦接到细长构件的毂系统,该毂系统包括:
金属外带;
在所述外带的内侧的聚合物适配器,该聚合物适配器包括:
远端部段,该远端部段包括多个径向突起,在所述多个径向突起中的成对径向突起之间的通道被配置成接收多根细丝中的细丝;和
在所述远端部段的近侧的近端部段,该近端部段没有径向突起;
延伸穿过所述远端部段和所述近端部段的中心内腔;和
金属内带,该金属内带围绕所述近端部段并且在所述外带的内侧,所述内带和所述近端部段之间的弧形空间被配置成接收多根细丝,所述内带或所述外带中的至少一个是不透射线的。
44.一种用于测量体腔压力的导管,该导管包括:
外部护套;和
内部构件,该内部构件在所述外部护套中并且能够相对于所述外部护套移动,直到所述内部构件的一部分位于所述外部护套中之外,所述内部构件包括:
细长管,该细长管包括围绕内腔的侧壁;
第一不透射线标记;
在所述第一不透射线标记的远侧的第二不透射线标记;
穿过所述侧壁的第一端口,所述第一端口靠近所述第一不透射线标记;和
穿过所述侧壁的第二端口,所述第二端口在所述第一端口的远侧,所述第二端口靠近所述第二不透射线标记,所述第二端口与所述第一端口在周向上间隔开;
与所述第一端口流体连通的第一压力传感器;和
与所述第二端口流体连通的第二压力传感器。
45.一种用于滤波器组件的壳体,该壳体被配置成影响ECG信号,该壳体包括:
多个电极垫,该多个电极垫被配置为耦接到多个ECG导联,所述多个电极垫进行颜色编码并且用数字或字母标记中的至少一种标记,所述多个电极处于模仿电极垫在受试者的胸部和外围上的位置的位置,所述多个电极垫包括至少十个电极垫;和
多个ECG导联输入,所述多个ECG导联输入被配置为耦接到ECG导联,该ECG导联耦接到受试者上的电极垫。
46.一种使用神经刺激器以使该神经刺激器移动来监测施加到受试者的神经刺激的效果的方法,该方法包括:
停止施加神经刺激;
在停止施加神经刺激之后,监测信号衰减到基线;
在监测到信号衰减至所述基线之后,恢复神经刺激;和
在恢复神经刺激之后,监测所述信号以检测所述神经刺激器的移动。
47.一种使用神经刺激器以使神经刺激器移动来监测施加到受试者的神经刺激的效果的方法,该方法包括:
施加包括在第一值处的参数的神经刺激;
将神经刺激的参数修改为不同于所述第一值的第二值,并且继续施加神经刺激;
在修改神经刺激的参数之后,监测信号;
在监测所述信号之后,恢复包括在第一值处的参数的神经刺激;和
在恢复包括在所述第一值处的参数的神经刺激之后,监测所述信号以检测所述神经刺激器的移动。
48.一种制造电极组件的方法,该方法包括:
将导体耦接到电极的突片的第一侧;
将所述电极定位在第一绝缘层和第二绝缘层之间,所述第一绝缘层包括通道,导体延伸通过所述通道,所述电极包括通过所述第二绝缘层暴露的第二侧。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862718147P | 2018-08-13 | 2018-08-13 | |
| US62/718,147 | 2018-08-13 | ||
| US201962840608P | 2019-04-30 | 2019-04-30 | |
| US62/840,608 | 2019-04-30 | ||
| US201962867438P | 2019-06-27 | 2019-06-27 | |
| US62/867,438 | 2019-06-27 | ||
| PCT/US2019/046202 WO2020036886A1 (en) | 2018-08-13 | 2019-08-12 | Systems and methods for affecting cardiac contractility and/or relaxation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112839602A true CN112839602A (zh) | 2021-05-25 |
Family
ID=69525754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980067356.8A Pending CN112839602A (zh) | 2018-08-13 | 2019-08-12 | 用于影响心脏收缩性和/或松弛性的系统和方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US11077298B2 (zh) |
| EP (1) | EP3836859A4 (zh) |
| JP (1) | JP2021535776A (zh) |
| CN (1) | CN112839602A (zh) |
| AU (1) | AU2019320750A1 (zh) |
| CA (1) | CA3107959A1 (zh) |
| IL (1) | IL280566A (zh) |
| SG (1) | SG11202101191PA (zh) |
| WO (1) | WO2020036886A1 (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3015372A1 (en) | 2016-03-09 | 2017-09-14 | CARDIONOMIC, Inc. | Cardiac contractility neurostimulation systems and methods |
| EP3664703A4 (en) | 2017-09-13 | 2021-05-12 | Cardionomic, Inc. | NEUROSTIMULATION SYSTEMS AND METHODS FOR INFLUENCING HEART CONTRACTILITY |
| US11690997B2 (en) | 2018-04-06 | 2023-07-04 | Puzzle Medical Devices Inc. | Mammalian body conduit intralumenal device and lumen wall anchor assembly, components thereof and methods of implantation and explanation thereof |
| WO2021138673A1 (en) * | 2020-01-03 | 2021-07-08 | Puzzle Medical Devices Inc. | Mammalian body conduit intralumenal device and lumen wall anchor assembly, components thereof and methods of implantation and explantation thereof |
| CN112839602A (zh) | 2018-08-13 | 2021-05-25 | 卡迪诺米克公司 | 用于影响心脏收缩性和/或松弛性的系统和方法 |
| SG11202111619WA (en) | 2019-05-06 | 2021-11-29 | Cardionomic Inc | Systems and methods for denoising physiological signals during electrical neuromodulation |
| ES2964315T3 (es) | 2019-06-27 | 2024-04-05 | Terra Co2 Tech Holdings Inc | Método de fabricación de reactivos cementosos |
| US20230166102A1 (en) * | 2020-04-28 | 2023-06-01 | Brown University | Shape-memory alloy and polymer electrode array for minimally-invasive spinal cord and brain stimulation and recording |
| US20210378594A1 (en) * | 2020-06-08 | 2021-12-09 | Biosense Webster (Israel) Ltd. | Features to assist in assembly and testing of devices |
| GB2601291A (en) * | 2020-10-13 | 2022-06-01 | Pacertool As | A catheter and method for detecting dyssynergy resulting from dyssynchrony |
| FR3117763B1 (fr) * | 2020-12-23 | 2024-05-03 | Centre Hospitalier Univ De Bordeaux | Catheter d’electroporation unipolaire et bipolaire |
| WO2022271416A1 (en) * | 2021-06-22 | 2022-12-29 | Medtronic, Inc. | Medical lead system |
| CN115721854B (zh) * | 2021-08-30 | 2024-03-26 | 深圳市先健心康医疗电子有限公司 | 电极导管结构及起搏电极导管装置 |
Family Cites Families (420)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5190546A (en) | 1983-10-14 | 1993-03-02 | Raychem Corporation | Medical devices incorporating SIM alloy elements |
| US5067957A (en) | 1983-10-14 | 1991-11-26 | Raychem Corporation | Method of inserting medical devices incorporating SIM alloy elements |
| US4718423A (en) | 1986-10-17 | 1988-01-12 | Spectramed, Inc. | Multiple-function cardiovascular catheter system with very high lumenal efficiency and no crossovers |
| US5365926A (en) | 1986-11-14 | 1994-11-22 | Desai Jawahar M | Catheter for mapping and ablation and method therefor |
| US4947866A (en) | 1988-02-16 | 1990-08-14 | Medtronic, Inc. | Medical electrical lead |
| US4950227A (en) | 1988-11-07 | 1990-08-21 | Boston Scientific Corporation | Stent delivery system |
| US5224491A (en) | 1991-01-07 | 1993-07-06 | Medtronic, Inc. | Implantable electrode for location within a blood vessel |
| US5465717A (en) | 1991-02-15 | 1995-11-14 | Cardiac Pathways Corporation | Apparatus and Method for ventricular mapping and ablation |
| US5345936A (en) | 1991-02-15 | 1994-09-13 | Cardiac Pathways Corporation | Apparatus with basket assembly for endocardial mapping |
| US5156154A (en) | 1991-03-08 | 1992-10-20 | Telectronics Pacing Systems, Inc. | Monitoring the hemodynamic state of a patient from measurements of myocardial contractility using doppler ultrasound techniques |
| US5197978B1 (en) | 1991-04-26 | 1996-05-28 | Advanced Coronary Tech | Removable heat-recoverable tissue supporting device |
| US5213098A (en) | 1991-07-26 | 1993-05-25 | Medtronic, Inc. | Post-extrasystolic potentiation stimulation with physiologic sensor feedback |
| US5259387A (en) | 1991-09-09 | 1993-11-09 | Quinton Instrument Company | ECG muscle artifact filter system |
| WO1993019803A1 (en) | 1992-03-31 | 1993-10-14 | Boston Scientific Corporation | Medical wire |
| US5782239A (en) | 1992-06-30 | 1998-07-21 | Cordis Webster, Inc. | Unique electrode configurations for cardiovascular electrode catheter with built-in deflection method and central puller wire |
| EP0668740A4 (en) | 1992-09-25 | 1998-10-07 | Ep Technologies | STRIP-SHAPED CARRIER FOR ELECTRODES FOR DIAGNOSTICS AND THERAPY OF HEART COMBUSTS. |
| US5336244A (en) | 1992-10-07 | 1994-08-09 | Medtronic, Inc. | Temperature sensor based capture detection for a pacer |
| US5383852A (en) | 1992-12-04 | 1995-01-24 | C. R. Bard, Inc. | Catheter with independent proximal and distal control |
| US5462527A (en) | 1993-06-29 | 1995-10-31 | C.R. Bard, Inc. | Actuator for use with steerable catheter |
| US5611777A (en) | 1993-05-14 | 1997-03-18 | C.R. Bard, Inc. | Steerable electrode catheter |
| IL116699A (en) | 1996-01-08 | 2001-09-13 | Biosense Ltd | Method of building a heart map |
| US5431649A (en) | 1993-08-27 | 1995-07-11 | Medtronic, Inc. | Method and apparatus for R-F ablation |
| WO1995010978A1 (en) | 1993-10-19 | 1995-04-27 | Ep Technologies, Inc. | Segmented electrode assemblies for ablation of tissue |
| JPH07178176A (ja) | 1993-12-24 | 1995-07-18 | Terumo Corp | カテーテル |
| US5968040A (en) | 1994-03-04 | 1999-10-19 | Ep Technologies, Inc. | Systems and methods using asymmetric multiple electrode arrays |
| US6216043B1 (en) * | 1994-03-04 | 2001-04-10 | Ep Technologies, Inc. | Asymmetric multiple electrode support structures |
| US5423881A (en) | 1994-03-14 | 1995-06-13 | Medtronic, Inc. | Medical electrical lead |
| US5598848A (en) | 1994-03-31 | 1997-02-04 | Ep Technologies, Inc. | Systems and methods for positioning multiple electrode structures in electrical contact with the myocardium |
| US5564434A (en) | 1995-02-27 | 1996-10-15 | Medtronic, Inc. | Implantable capacitive absolute pressure and temperature sensor |
| US6059810A (en) | 1995-05-10 | 2000-05-09 | Scimed Life Systems, Inc. | Endovascular stent and method |
| US9289618B1 (en) | 1996-01-08 | 2016-03-22 | Impulse Dynamics Nv | Electrical muscle controller |
| US6363279B1 (en) | 1996-01-08 | 2002-03-26 | Impulse Dynamics N.V. | Electrical muscle controller |
| US8825152B2 (en) | 1996-01-08 | 2014-09-02 | Impulse Dynamics, N.V. | Modulation of intracellular calcium concentration using non-excitatory electrical signals applied to the tissue |
| IL119261A0 (en) | 1996-09-17 | 1996-12-05 | New Technologies Sa Ysy Ltd | Electrical muscle controller |
| JP4175662B2 (ja) | 1996-01-08 | 2008-11-05 | インパルス ダイナミクス エヌ.ヴイ. | 電気的筋肉制御装置 |
| US7167748B2 (en) | 1996-01-08 | 2007-01-23 | Impulse Dynamics Nv | Electrical muscle controller |
| IL125424A0 (en) | 1998-07-20 | 1999-03-12 | New Technologies Sa Ysy Ltd | Pacing with hemodynamic enhancement |
| CA2240943A1 (en) | 1996-01-08 | 1997-07-17 | Shlomo Ben-Haim | Electrical muscle controller |
| US8321013B2 (en) | 1996-01-08 | 2012-11-27 | Impulse Dynamics, N.V. | Electrical muscle controller and pacing with hemodynamic enhancement |
| US6415178B1 (en) | 1996-09-16 | 2002-07-02 | Impulse Dynamics N.V. | Fencing of cardiac muscles |
| US5853411A (en) | 1996-01-19 | 1998-12-29 | Ep Technologies, Inc. | Enhanced electrical connections for electrode structures |
| US5925038A (en) | 1996-01-19 | 1999-07-20 | Ep Technologies, Inc. | Expandable-collapsible electrode structures for capacitive coupling to tissue |
| WO1997025918A1 (en) | 1996-01-19 | 1997-07-24 | Ep Technologies, Inc. | Electrode structures formed from flexible, porous, or woven materials |
| FR2796562B1 (fr) | 1996-04-04 | 2005-06-24 | Medtronic Inc | Techniques de stimulation d'un tissu vivant et d'enregistrement avec commande locale de sites actifs |
| AU714617B2 (en) | 1996-04-04 | 2000-01-06 | Medtronic, Inc. | Living tissue stimulation and recording techniques |
| US5711316A (en) | 1996-04-30 | 1998-01-27 | Medtronic, Inc. | Method of treating movement disorders by brain infusion |
| US6006134A (en) | 1998-04-30 | 1999-12-21 | Medtronic, Inc. | Method and device for electronically controlling the beating of a heart using venous electrical stimulation of nerve fibers |
| EP1011793A1 (en) | 1996-09-16 | 2000-06-28 | Impulse Dynamics N.V. | Apparatus and method for controlling the contractility of muscles |
| US6463324B1 (en) | 1996-09-16 | 2002-10-08 | Impulse Dynamics N. V. | Cardiac output enhanced pacemaker |
| ZA976112B (en) | 1996-09-16 | 1998-02-10 | New Technologies Sa Ysy Ltd | Apparatus and method for controlling the contractility of muscles. |
| US5755766A (en) | 1997-01-24 | 1998-05-26 | Cardiac Pacemakers, Inc. | Open-ended intravenous cardiac lead |
| US5954761A (en) | 1997-03-25 | 1999-09-21 | Intermedics Inc. | Implantable endocardial lead assembly having a stent |
| US5948007A (en) | 1997-04-30 | 1999-09-07 | Medtronic, Inc. | Dual channel implantation neurostimulation techniques |
| US6547788B1 (en) | 1997-07-08 | 2003-04-15 | Atrionx, Inc. | Medical device with sensor cooperating with expandable member |
| ES2283020T3 (es) | 1997-07-16 | 2007-10-16 | Metacure Nv | Controlador del musculo liso. |
| US6071308A (en) | 1997-10-01 | 2000-06-06 | Boston Scientific Corporation | Flexible metal wire stent |
| US6231516B1 (en) | 1997-10-14 | 2001-05-15 | Vacusense, Inc. | Endoluminal implant with therapeutic and diagnostic capability |
| US6280467B1 (en) | 1998-02-26 | 2001-08-28 | World Medical Manufacturing Corporation | Delivery system for deployment and endovascular assembly of a multi-stage stented graft |
| EP0951920B1 (de) | 1998-04-22 | 2004-10-20 | BIOTRONIK Mess- und Therapiegeräte GmbH & Co Ingenieurbüro Berlin | Gefässelektrodenleitung |
| US6058331A (en) | 1998-04-27 | 2000-05-02 | Medtronic, Inc. | Apparatus and method for treating peripheral vascular disease and organ ischemia by electrical stimulation with closed loop feedback control |
| US6319241B1 (en) | 1998-04-30 | 2001-11-20 | Medtronic, Inc. | Techniques for positioning therapy delivery elements within a spinal cord or a brain |
| US6447478B1 (en) | 1998-05-15 | 2002-09-10 | Ronald S. Maynard | Thin-film shape memory alloy actuators and processing methods |
| US6428537B1 (en) | 1998-05-22 | 2002-08-06 | Scimed Life Systems, Inc. | Electrophysiological treatment methods and apparatus employing high voltage pulse to render tissue temporarily unresponsive |
| US6740113B2 (en) | 1998-05-29 | 2004-05-25 | Scimed Life Systems, Inc. | Balloon expandable stent with a self-expanding portion |
| US7198635B2 (en) | 2000-10-17 | 2007-04-03 | Asthmatx, Inc. | Modification of airways by application of energy |
| US6292695B1 (en) | 1998-06-19 | 2001-09-18 | Wilton W. Webster, Jr. | Method and apparatus for transvascular treatment of tachycardia and fibrillation |
| US6036697A (en) | 1998-07-09 | 2000-03-14 | Scimed Life Systems, Inc. | Balloon catheter with balloon inflation at distal end of balloon |
| US6950689B1 (en) | 1998-08-03 | 2005-09-27 | Boston Scientific Scimed, Inc. | Dynamically alterable three-dimensional graphical model of a body region |
| US5997563A (en) | 1998-09-28 | 1999-12-07 | Medtronic, Inc. | Implantable stent having variable diameter |
| IL126905A0 (en) | 1998-11-05 | 1999-09-22 | Impulse Dynamics Ltd | Multi-electrode catheter |
| US6587721B1 (en) | 1998-11-06 | 2003-07-01 | Impulse Dynamics N.V. | Trigger-based regulation of excitable tissue control of the heart |
| US6292693B1 (en) | 1998-11-06 | 2001-09-18 | Impulse Dynamics N.V. | Contractility enhancement using excitable tissue control and multi-site pacing |
| US6675043B1 (en) | 1998-11-06 | 2004-01-06 | Impulse Dynamics N.V. | Sensor-based regulation of excitable tissue control of the heart |
| US6725093B1 (en) | 1998-11-06 | 2004-04-20 | Impulse Dynamics N.V. | Regulation of excitable tissue control of the heart based on physiological input |
| US6254610B1 (en) | 1999-05-24 | 2001-07-03 | Impulse Dynamics N.V. | Device and method for dragging and positioning a member within a duct in a body |
| US6152882A (en) | 1999-01-26 | 2000-11-28 | Impulse Dynamics N.V. | Apparatus and method for chronic measurement of monophasic action potentials |
| US7018401B1 (en) | 1999-02-01 | 2006-03-28 | Board Of Regents, The University Of Texas System | Woven intravascular devices and methods for making the same and apparatus for delivery of the same |
| EP1148839B1 (en) | 1999-02-01 | 2008-09-10 | Board Of Regents, The University Of Texas System | Woven bifurcated and trifurcated stents and methods for making the same |
| US6161029A (en) | 1999-03-08 | 2000-12-12 | Medtronic, Inc. | Apparatus and method for fixing electrodes in a blood vessel |
| US6136021A (en) | 1999-03-23 | 2000-10-24 | Cardiac Pacemakers, Inc. | Expandable electrode for coronary venous leads |
| US6370430B1 (en) | 1999-03-25 | 2002-04-09 | Impulse Dynamics N.V. | Apparatus and method for controlling the delivery of non-excitatory cardiac contractility modulating signals to a heart |
| US6263242B1 (en) | 1999-03-25 | 2001-07-17 | Impulse Dynamics N.V. | Apparatus and method for timing the delivery of non-excitatory ETC signals to a heart |
| US6522904B1 (en) | 1999-03-30 | 2003-02-18 | Impulse Dynamics N.V. | Bipolar sensor for muscle tissue action potential duration estimation |
| EP1164929B1 (en) | 1999-04-05 | 2007-01-03 | The Regents Of The University Of California | Endomyocardial monophasic action potential for early detection of myocardium pathology |
| US6353762B1 (en) | 1999-04-30 | 2002-03-05 | Medtronic, Inc. | Techniques for selective activation of neurons in the brain, spinal cord parenchyma or peripheral nerve |
| US6292704B1 (en) | 1999-05-25 | 2001-09-18 | Impulse Dynamics N. V. | High capacitance myocardial electrodes |
| US6442424B1 (en) | 1999-05-26 | 2002-08-27 | Impulse Dynamics N.V. | Local cardiac motion control using applied electrical signals |
| US6285906B1 (en) | 1999-05-26 | 2001-09-04 | Impulse Dynamics N. V. | Muscle contraction assist device |
| WO2000072918A1 (en) | 1999-05-26 | 2000-12-07 | Impulse Dynamic Nv | Shockless defibrillation |
| US6304777B1 (en) | 1999-05-26 | 2001-10-16 | Impulse Dynamics N.V. | Induction of cardioplegia applied electrical signals |
| US7171263B2 (en) | 1999-06-04 | 2007-01-30 | Impulse Dynamics Nv | Drug delivery device |
| US7092753B2 (en) | 1999-06-04 | 2006-08-15 | Impulse Dynamics Nv | Drug delivery device |
| US7190997B1 (en) | 1999-06-04 | 2007-03-13 | Impulse Dynamics Nv | Drug delivery device |
| US6223072B1 (en) | 1999-06-08 | 2001-04-24 | Impulse Dynamics N.V. | Apparatus and method for collecting data useful for determining the parameters of an alert window for timing delivery of ETC signals to a heart under varying cardiac conditions |
| US6233487B1 (en) | 1999-06-08 | 2001-05-15 | Impulse Dynamics N.V. | Apparatus and method for setting the parameters of an alert window used for timing the delivery of ETC signals to a heart under varying cardiac conditions |
| EP1198271A4 (en) | 1999-06-25 | 2009-01-21 | Univ Emory | DEVICES AND METHODS FOR STIMULATING THE VAGUSNERVS |
| US6348045B1 (en) | 1999-07-12 | 2002-02-19 | Impulse Dynamics N.V. | Catheter with distal-end engaging means |
| US6335538B1 (en) | 1999-07-23 | 2002-01-01 | Impulse Dynamics N.V. | Electro-optically driven solid state relay system |
| CA2314517A1 (en) | 1999-07-26 | 2001-01-26 | Gust H. Bardy | System and method for determining a reference baseline of individual patient status for use in an automated collection and analysis patient care system |
| US7303526B2 (en) | 1999-08-09 | 2007-12-04 | Cardiokinetix, Inc. | Device for improving cardiac function |
| US6360126B1 (en) | 1999-08-20 | 2002-03-19 | Impulse Dynamics N.V. | Apparatus and method for controlling the delivery of contractility modulating non-excitatory signals to the heart |
| US6360123B1 (en) | 1999-08-24 | 2002-03-19 | Impulse Dynamics N.V. | Apparatus and method for determining a mechanical property of an organ or body cavity by impedance determination |
| US7027863B1 (en) | 1999-10-25 | 2006-04-11 | Impulse Dynamics N.V. | Device for cardiac therapy |
| AU1049901A (en) | 1999-10-25 | 2001-05-08 | Impulse Dynamics N.V. | Cardiac contractility modulation device having anti-arrhythmic capabilities and a method of operating thereof |
| US6993385B1 (en) | 1999-10-25 | 2006-01-31 | Impulse Dynamics N.V. | Cardiac contractility modulation device having anti-arrhythmic capabilities and a method of operating thereof |
| US6295475B1 (en) | 1999-10-27 | 2001-09-25 | Pacesetter, Inc. | Single-pass atrial ventricular lead with multiple atrial ring electrodes and a selective atrial electrode adaptor for the coronary sinus region |
| US6662055B1 (en) | 1999-12-17 | 2003-12-09 | Impulse Dynamics Nv | Multi-electrode intravascular lead |
| IL133592A0 (en) | 1999-12-19 | 2001-04-30 | Impulse Dynamics Ltd | Fluid phase electrode lead |
| US6480737B1 (en) | 1999-12-29 | 2002-11-12 | Impulse Dynamics Nv | Field delivery safety system using detection of atypical ECG |
| US7865237B2 (en) | 2000-01-20 | 2011-01-04 | The Cleveland Clinic Foundation | Methods and systems of achieving hemodynamic control through neuromodulation |
| US20060085046A1 (en) | 2000-01-20 | 2006-04-20 | Ali Rezai | Methods of treating medical conditions by transvascular neuromodulation of the autonomic nervous system |
| US6600953B2 (en) | 2000-12-11 | 2003-07-29 | Impulse Dynamics N.V. | Acute and chronic electrical signal therapy for obesity |
| US7096070B1 (en) | 2000-02-09 | 2006-08-22 | Transneuronix, Inc. | Medical implant device for electrostimulation using discrete micro-electrodes |
| WO2001078574A2 (en) | 2000-04-18 | 2001-10-25 | Impulse Dynamics N.V. | Method and device for inserting leads into coronary veins |
| US6754532B1 (en) | 2000-04-28 | 2004-06-22 | Medtronic, Inc. | Coronary sinus flow regulated pacing |
| AU5504301A (en) | 2000-05-04 | 2001-11-12 | Impulse Dynamics N.V. | Signal delivery through the right ventricular septum |
| US6712831B1 (en) | 2000-06-16 | 2004-03-30 | Aaron V. Kaplan | Methods and apparatus for forming anastomotic sites |
| US20040215233A1 (en) | 2000-06-16 | 2004-10-28 | Magenta Medical Corporation | Methods and apparatus for forming anastomotic sites |
| US6694192B2 (en) | 2000-07-06 | 2004-02-17 | Impulse Dynamics N.V. | Uterus muscle controller |
| US7616997B2 (en) | 2000-09-27 | 2009-11-10 | Kieval Robert S | Devices and methods for cardiovascular reflex control via coupled electrodes |
| US7158832B2 (en) | 2000-09-27 | 2007-01-02 | Cvrx, Inc. | Electrode designs and methods of use for cardiovascular reflex control devices |
| US6850801B2 (en) | 2001-09-26 | 2005-02-01 | Cvrx, Inc. | Mapping methods for cardiovascular reflex control devices |
| US8086314B1 (en) | 2000-09-27 | 2011-12-27 | Cvrx, Inc. | Devices and methods for cardiovascular reflex control |
| US7499742B2 (en) | 2001-09-26 | 2009-03-03 | Cvrx, Inc. | Electrode structures and methods for their use in cardiovascular reflex control |
| US7623926B2 (en) | 2000-09-27 | 2009-11-24 | Cvrx, Inc. | Stimulus regimens for cardiovascular reflex control |
| US6985774B2 (en) | 2000-09-27 | 2006-01-10 | Cvrx, Inc. | Stimulus regimens for cardiovascular reflex control |
| US7840271B2 (en) | 2000-09-27 | 2010-11-23 | Cvrx, Inc. | Stimulus regimens for cardiovascular reflex control |
| US6522926B1 (en) | 2000-09-27 | 2003-02-18 | Cvrx, Inc. | Devices and methods for cardiovascular reflex control |
| US6749600B1 (en) | 2000-11-15 | 2004-06-15 | Impulse Dynamics N.V. | Braided splittable catheter sheath |
| US6609025B2 (en) | 2001-01-02 | 2003-08-19 | Cyberonics, Inc. | Treatment of obesity by bilateral sub-diaphragmatic nerve stimulation |
| US6564096B2 (en) | 2001-02-28 | 2003-05-13 | Robert A. Mest | Method and system for treatment of tachycardia and fibrillation |
| WO2002070167A1 (en) | 2001-03-05 | 2002-09-12 | Idev Technologies, Inc. | Methods for securing strands of woven medical devices |
| US6684105B2 (en) | 2001-08-31 | 2004-01-27 | Biocontrol Medical, Ltd. | Treatment of disorders by unidirectional nerve stimulation |
| US6748271B2 (en) | 2001-07-27 | 2004-06-08 | Cardiac Pacemakers, Inc. | Method and system for treatment of neurocardiogenic syncope |
| US8934968B2 (en) | 2001-08-03 | 2015-01-13 | Cardiac Pacemakers, Inc. | Neurostimulation and coronary artery disease treatment |
| US6675809B2 (en) | 2001-08-27 | 2004-01-13 | Richard S. Stack | Satiation devices and methods |
| US6845776B2 (en) | 2001-08-27 | 2005-01-25 | Richard S. Stack | Satiation devices and methods |
| US7097665B2 (en) | 2003-01-16 | 2006-08-29 | Synecor, Llc | Positioning tools and methods for implanting medical devices |
| US20140046407A1 (en) | 2001-08-31 | 2014-02-13 | Bio Control Medical (B.C.M.) Ltd. | Nerve stimulation techniques |
| US7778703B2 (en) | 2001-08-31 | 2010-08-17 | Bio Control Medical (B.C.M.) Ltd. | Selective nerve fiber stimulation for treating heart conditions |
| US7904176B2 (en) | 2006-09-07 | 2011-03-08 | Bio Control Medical (B.C.M.) Ltd. | Techniques for reducing pain associated with nerve stimulation |
| US7885709B2 (en) | 2001-08-31 | 2011-02-08 | Bio Control Medical (B.C.M.) Ltd. | Nerve stimulation for treating disorders |
| US20080119898A1 (en) | 2005-09-22 | 2008-05-22 | Biocontrol Medical Ltd. | Nitric oxide synthase-affecting parasympathetic stimulation |
| US8571653B2 (en) | 2001-08-31 | 2013-10-29 | Bio Control Medical (B.C.M.) Ltd. | Nerve stimulation techniques |
| US8615294B2 (en) | 2008-08-13 | 2013-12-24 | Bio Control Medical (B.C.M.) Ltd. | Electrode devices for nerve stimulation and cardiac sensing |
| US7778711B2 (en) | 2001-08-31 | 2010-08-17 | Bio Control Medical (B.C.M.) Ltd. | Reduction of heart rate variability by parasympathetic stimulation |
| US8565896B2 (en) | 2010-11-22 | 2013-10-22 | Bio Control Medical (B.C.M.) Ltd. | Electrode cuff with recesses |
| US7974693B2 (en) | 2001-08-31 | 2011-07-05 | Bio Control Medical (B.C.M.) Ltd. | Techniques for applying, configuring, and coordinating nerve fiber stimulation |
| US6640136B1 (en) | 2001-09-12 | 2003-10-28 | Pacesetters, Inc. | Implantable cardiac stimulation device with automatic electrode selection for avoiding cross-chamber stimulation |
| US7308303B2 (en) | 2001-11-01 | 2007-12-11 | Advanced Bionics Corporation | Thrombolysis and chronic anticoagulation therapy |
| US6669693B2 (en) | 2001-11-13 | 2003-12-30 | Mayo Foundation For Medical Education And Research | Tissue ablation device and methods of using |
| US6746465B2 (en) | 2001-12-14 | 2004-06-08 | The Regents Of The University Of California | Catheter based balloon for therapy modification and positioning of tissue |
| US6741878B2 (en) | 2001-12-14 | 2004-05-25 | Biosense Webster, Inc. | Basket catheter with improved expansion mechanism |
| US8233991B2 (en) | 2002-02-04 | 2012-07-31 | Boston Scientific Neuromodulation Corporation | Method for programming implantable device |
| US7146984B2 (en) | 2002-04-08 | 2006-12-12 | Synecor, Llc | Method and apparatus for modifying the exit orifice of a satiation pouch |
| US20070135875A1 (en) | 2002-04-08 | 2007-06-14 | Ardian, Inc. | Methods and apparatus for thermally-induced renal neuromodulation |
| US7162303B2 (en) | 2002-04-08 | 2007-01-09 | Ardian, Inc. | Renal nerve stimulation method and apparatus for treatment of patients |
| US7020523B1 (en) | 2002-04-16 | 2006-03-28 | Pacesetter, Inc. | Methods and systems for automatically switching electrode configurations |
| US7386346B2 (en) | 2002-04-22 | 2008-06-10 | Medtronic, Inc. | Controlled and modulated high power racing combined with intracardiac pressure monitoring feedback system utilizing the chronicle implantable hemodynamic monitoring (IHM) and calculated EPAD |
| US7195594B2 (en) | 2002-05-14 | 2007-03-27 | Pacesetter, Inc. | Method for minimally invasive calibration of implanted pressure transducers |
| US7321793B2 (en) | 2003-06-13 | 2008-01-22 | Biocontrol Medical Ltd. | Vagal stimulation for atrial fibrillation therapy |
| US8036745B2 (en) | 2004-06-10 | 2011-10-11 | Bio Control Medical (B.C.M.) Ltd. | Parasympathetic pacing therapy during and following a medical procedure, clinical trauma or pathology |
| US20140214135A1 (en) | 2002-05-23 | 2014-07-31 | Bio Control Medical (B.C.M.) Ltd. | Dissolvable electrode device |
| US8204591B2 (en) | 2002-05-23 | 2012-06-19 | Bio Control Medical (B.C.M.) Ltd. | Techniques for prevention of atrial fibrillation |
| US20120303080A1 (en) | 2003-06-13 | 2012-11-29 | Bio Control Medical (B.C.M.) Ltd. | Parasympathetic nerve stimulation |
| US7277761B2 (en) | 2002-06-12 | 2007-10-02 | Pacesetter, Inc. | Vagal stimulation for improving cardiac function in heart failure or CHF patients |
| US7904151B2 (en) | 2002-07-24 | 2011-03-08 | Bio Control Medical (B.C.M.) Ltd. | Parasympathetic stimulation for treating ventricular arrhythmia |
| US6944490B1 (en) | 2002-09-25 | 2005-09-13 | Advanced Cardiovascular Systems, Inc. | Apparatus and method for positioning and delivering a therapeutic tool to the inside of a heart |
| US20050004638A1 (en) * | 2002-10-23 | 2005-01-06 | Medtronic, Inc. | Medical lead and manufacturing method therefor |
| US7027851B2 (en) | 2002-10-30 | 2006-04-11 | Biosense Webster, Inc. | Multi-tip steerable catheter |
| US7277757B2 (en) | 2002-10-31 | 2007-10-02 | Medtronic, Inc. | Respiratory nerve stimulation |
| US20040098090A1 (en) | 2002-11-14 | 2004-05-20 | Williams Michael S. | Polymeric endoprosthesis and method of manufacture |
| US7285287B2 (en) | 2002-11-14 | 2007-10-23 | Synecor, Llc | Carbon dioxide-assisted methods of providing biocompatible intraluminal prostheses |
| US6887266B2 (en) | 2002-11-14 | 2005-05-03 | Synecor, Llc | Endoprostheses and methods of manufacture |
| US20050187615A1 (en) | 2004-02-23 | 2005-08-25 | Williams Michael S. | Polymeric endoprostheses with enhanced strength and flexibility and methods of manufacture |
| US7704276B2 (en) | 2002-11-15 | 2010-04-27 | Synecor, Llc | Endoprostheses and methods of manufacture |
| US7163554B2 (en) | 2002-11-15 | 2007-01-16 | Synecor, Llc | Endoprostheses and methods of manufacture |
| JP2006506208A (ja) | 2002-11-15 | 2006-02-23 | サインコア,リミテッド・ライアビリティ・カンパニー | ポリマー製体内プロテーゼおよび製造方法 |
| US7130700B2 (en) | 2002-11-19 | 2006-10-31 | Medtronic, Inc. | Multilumen body for an implantable medical device |
| US7555351B2 (en) | 2002-12-19 | 2009-06-30 | Cardiac Pacemakers, Inc. | Pulmonary artery lead for atrial therapy and atrial pacing and sensing |
| US7857748B2 (en) | 2003-01-15 | 2010-12-28 | Syne Cor, Llc | Photocurable endoprosthesis methods of manufacture |
| US7387629B2 (en) | 2003-01-21 | 2008-06-17 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter design that facilitates positioning at tissue to be diagnosed or treated |
| US6885889B2 (en) | 2003-02-28 | 2005-04-26 | Medtronic, Inc. | Method and apparatus for optimizing cardiac resynchronization therapy based on left ventricular acceleration |
| WO2004080533A1 (en) | 2003-03-10 | 2004-09-23 | Impulse Dynamics Nv | Apparatus and method for delivering electrical signals to modify gene expression in cardiac tissue |
| US6932930B2 (en) | 2003-03-10 | 2005-08-23 | Synecor, Llc | Intraluminal prostheses having polymeric material with selectively modified crystallinity and methods of making same |
| US7276062B2 (en) | 2003-03-12 | 2007-10-02 | Biosence Webster, Inc. | Deflectable catheter with hinge |
| US6973350B1 (en) | 2003-03-31 | 2005-12-06 | Pacesetter, Inc. | Diagnosis of atrial fusion, atrial pseudofusion and/or native atrial activity |
| US6832478B2 (en) | 2003-04-09 | 2004-12-21 | Medtronic, Inc. | Shape memory alloy actuators |
| US7658709B2 (en) | 2003-04-09 | 2010-02-09 | Medtronic, Inc. | Shape memory alloy actuators |
| US8060197B2 (en) | 2003-05-23 | 2011-11-15 | Bio Control Medical (B.C.M.) Ltd. | Parasympathetic stimulation for termination of non-sinus atrial tachycardia |
| US20080046016A1 (en) | 2003-05-23 | 2008-02-21 | Biocontrol Medical Ltd. | Intravascular parasympatheticstimulation for atrial cardioversion |
| US8239045B2 (en) | 2003-06-04 | 2012-08-07 | Synecor Llc | Device and method for retaining a medical device within a vessel |
| US7082336B2 (en) | 2003-06-04 | 2006-07-25 | Synecor, Llc | Implantable intravascular device for defibrillation and/or pacing |
| CA2527909A1 (en) | 2003-06-04 | 2005-01-06 | Synecor Llc | Intravascular electrophysiological system and methods |
| US7617007B2 (en) | 2003-06-04 | 2009-11-10 | Synecor Llc | Method and apparatus for retaining medical implants within body vessels |
| EP1648558A4 (en) | 2003-06-13 | 2015-05-27 | Biocontrol Medical B C M Ltd | APPLICATIONS OF VAGAL STIMULATION |
| EP1648560A4 (en) | 2003-06-13 | 2015-10-28 | Biocontrol Medical Ltd | VAGAL STIMULATION FOR ANTI-EMBOLIC THERAPY |
| US7092759B2 (en) | 2003-07-30 | 2006-08-15 | Medtronic, Inc. | Method of optimizing cardiac resynchronization therapy using sensor signals of septal wall motion |
| EP1667595B1 (en) | 2003-09-12 | 2014-01-01 | Vessix Vascular, Inc. | System for selectable eccentric remodeling and/or ablation of atherosclerotic material |
| US7229437B2 (en) | 2003-09-22 | 2007-06-12 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Medical device having integral traces and formed electrodes |
| US20050247320A1 (en) | 2003-10-10 | 2005-11-10 | Stack Richard S | Devices and methods for retaining a gastro-esophageal implant |
| US8206456B2 (en) | 2003-10-10 | 2012-06-26 | Barosense, Inc. | Restrictive and/or obstructive implant system for inducing weight loss |
| US7480532B2 (en) | 2003-10-22 | 2009-01-20 | Cvrx, Inc. | Baroreflex activation for pain control, sedation and sleep |
| US7377939B2 (en) | 2003-11-19 | 2008-05-27 | Synecor, Llc | Highly convertible endolumenal prostheses and methods of manufacture |
| US20050119752A1 (en) | 2003-11-19 | 2005-06-02 | Synecor Llc | Artificial intervertebral disc |
| WO2005058415A2 (en) | 2003-12-12 | 2005-06-30 | Synecor, Llc | Implantable medical device having pre-implant exoskeleton |
| US20050142315A1 (en) | 2003-12-24 | 2005-06-30 | Desimone Joseph M. | Liquid perfluoropolymers and medical applications incorporating same |
| US7509166B2 (en) | 2003-12-24 | 2009-03-24 | Cardiac Pacemakers, Inc. | Automatic baroreflex modulation responsive to adverse event |
| US8126560B2 (en) | 2003-12-24 | 2012-02-28 | Cardiac Pacemakers, Inc. | Stimulation lead for stimulating the baroreceptors in the pulmonary artery |
| US7706884B2 (en) | 2003-12-24 | 2010-04-27 | Cardiac Pacemakers, Inc. | Baroreflex stimulation synchronized to circadian rhythm |
| US7643875B2 (en) | 2003-12-24 | 2010-01-05 | Cardiac Pacemakers, Inc. | Baroreflex stimulation system to reduce hypertension |
| US20050273146A1 (en) | 2003-12-24 | 2005-12-08 | Synecor, Llc | Liquid perfluoropolymers and medical applications incorporating same |
| US7869881B2 (en) | 2003-12-24 | 2011-01-11 | Cardiac Pacemakers, Inc. | Baroreflex stimulator with integrated pressure sensor |
| US8024050B2 (en) | 2003-12-24 | 2011-09-20 | Cardiac Pacemakers, Inc. | Lead for stimulating the baroreceptors in the pulmonary artery |
| US7873413B2 (en) | 2006-07-24 | 2011-01-18 | Cardiac Pacemakers, Inc. | Closed loop neural stimulation synchronized to cardiac cycles |
| US20080015659A1 (en) | 2003-12-24 | 2008-01-17 | Yi Zhang | Neurostimulation systems and methods for cardiac conditions |
| US7486991B2 (en) | 2003-12-24 | 2009-02-03 | Cardiac Pacemakers, Inc. | Baroreflex modulation to gradually decrease blood pressure |
| US20050149132A1 (en) | 2003-12-24 | 2005-07-07 | Imad Libbus | Automatic baroreflex modulation based on cardiac activity |
| US8126559B2 (en) | 2004-11-30 | 2012-02-28 | Cardiac Pacemakers, Inc. | Neural stimulation with avoidance of inappropriate stimulation |
| US20050271794A1 (en) | 2003-12-24 | 2005-12-08 | Synecor, Llc | Liquid perfluoropolymers and medical and cosmetic applications incorporating same |
| US7460906B2 (en) | 2003-12-24 | 2008-12-02 | Cardiac Pacemakers, Inc. | Baroreflex stimulation to treat acute myocardial infarction |
| US7295881B2 (en) | 2003-12-29 | 2007-11-13 | Biocontrol Medical Ltd. | Nerve-branch-specific action-potential activation, inhibition, and monitoring |
| WO2005067817A1 (en) | 2004-01-13 | 2005-07-28 | Remon Medical Technologies Ltd | Devices for fixing a sensor in a body lumen |
| US7547286B2 (en) | 2004-02-16 | 2009-06-16 | Choate John I M | Method to reduce inflammation and tactile finger sensation deficit due to carpal tunnel syndrome or arthritis |
| US20050187556A1 (en) | 2004-02-25 | 2005-08-25 | Synecor, Llc | Universal percutaneous spinal access system |
| US8352031B2 (en) | 2004-03-10 | 2013-01-08 | Impulse Dynamics Nv | Protein activity modification |
| US8548583B2 (en) | 2004-03-10 | 2013-10-01 | Impulse Dynamics Nv | Protein activity modification |
| EP1750799A2 (en) | 2004-05-04 | 2007-02-14 | The Cleveland Clinic Foundation | Methods of treating medical conditions by neuromodulation of the sympathetic nervous system |
| US7231260B2 (en) | 2004-05-06 | 2007-06-12 | Boston Scientific Scimed, Inc. | Intravascular self-anchoring electrode body with arcuate springs, spring loops, or arms |
| US7260431B2 (en) | 2004-05-20 | 2007-08-21 | Cardiac Pacemakers, Inc. | Combined remodeling control therapy and anti-remodeling therapy by implantable cardiac device |
| US8116881B2 (en) | 2004-06-10 | 2012-02-14 | Bio Control Medical (B.C.M.) Ltd | Electrode assembly for nerve control |
| WO2006012050A2 (en) | 2004-06-30 | 2006-02-02 | Cvrx, Inc. | Connection structures for extra-vascular electrode lead body |
| AU2005292029A1 (en) | 2004-09-30 | 2006-04-13 | Synecor, Llc | Artificial intervertebral disc nucleus |
| US20060074453A1 (en) | 2004-10-04 | 2006-04-06 | Cvrx, Inc. | Baroreflex activation and cardiac resychronization for heart failure treatment |
| US8175705B2 (en) | 2004-10-12 | 2012-05-08 | Cardiac Pacemakers, Inc. | System and method for sustained baroreflex stimulation |
| US20060089694A1 (en) | 2004-10-21 | 2006-04-27 | Cardiac Pacemakers, Inc. | Delivery system and method for pulmonary artery leads |
| US8244355B2 (en) | 2004-10-29 | 2012-08-14 | Medtronic, Inc. | Method and apparatus to provide diagnostic index and therapy regulated by subject's autonomic nervous system |
| US7200445B1 (en) * | 2005-10-21 | 2007-04-03 | Asthmatx, Inc. | Energy delivery devices and methods |
| US7468062B2 (en) | 2004-11-24 | 2008-12-23 | Ablation Frontiers, Inc. | Atrial ablation catheter adapted for treatment of septal wall arrhythmogenic foci and method of use |
| US7891085B1 (en) | 2005-01-11 | 2011-02-22 | Boston Scientific Neuromodulation Corporation | Electrode array assembly and method of making same |
| US7672724B2 (en) | 2005-01-18 | 2010-03-02 | Cardiac Pacemakers, Inc. | Method and apparatus for optimizing electrical stimulation parameters using heart rate variability |
| US8609082B2 (en) | 2005-01-25 | 2013-12-17 | Bio Control Medical Ltd. | Administering bone marrow progenitor cells or myoblasts followed by application of an electrical current for cardiac repair, increasing blood supply or enhancing angiogenesis |
| US20060178586A1 (en) | 2005-02-07 | 2006-08-10 | Dobak John D Iii | Devices and methods for accelerometer-based characterization of cardiac function and identification of LV target pacing zones |
| US8224444B2 (en) | 2005-02-18 | 2012-07-17 | Bio Control Medical (B.C.M.) Ltd. | Intermittent electrical stimulation |
| US7769446B2 (en) | 2005-03-11 | 2010-08-03 | Cardiac Pacemakers, Inc. | Neural stimulation system for cardiac fat pads |
| US7363082B2 (en) | 2005-03-24 | 2008-04-22 | Synecor Llc | Flexible hermetic enclosure for implantable medical devices |
| US7542800B2 (en) | 2005-04-05 | 2009-06-02 | Cardiac Pacemakers, Inc. | Method and apparatus for synchronizing neural stimulation to cardiac cycles |
| US7499748B2 (en) | 2005-04-11 | 2009-03-03 | Cardiac Pacemakers, Inc. | Transvascular neural stimulation device |
| US7881782B2 (en) | 2005-04-20 | 2011-02-01 | Cardiac Pacemakers, Inc. | Neural stimulation system to prevent simultaneous energy discharges |
| US7904158B2 (en) | 2005-04-28 | 2011-03-08 | Medtronic, Inc. | Measurement of coronary sinus parameters to optimize left ventricular performance |
| US7561923B2 (en) | 2005-05-09 | 2009-07-14 | Cardiac Pacemakers, Inc. | Method and apparatus for controlling autonomic balance using neural stimulation |
| US7765000B2 (en) | 2005-05-10 | 2010-07-27 | Cardiac Pacemakers, Inc. | Neural stimulation system with pulmonary artery lead |
| US7734348B2 (en) | 2005-05-10 | 2010-06-08 | Cardiac Pacemakers, Inc. | System with left/right pulmonary artery electrodes |
| US7617003B2 (en) | 2005-05-16 | 2009-11-10 | Cardiac Pacemakers, Inc. | System for selective activation of a nerve trunk using a transvascular reshaping lead |
| WO2007029254A2 (en) | 2005-09-06 | 2007-03-15 | Impulse Dynamics N.V. | Apparatus and method for delivering electrical signals to a heart |
| US8731659B2 (en) | 2005-09-20 | 2014-05-20 | Cardiac Pacemakers, Inc. | Multi-site lead/system using a multi-pole connection and methods therefor |
| US7616990B2 (en) | 2005-10-24 | 2009-11-10 | Cardiac Pacemakers, Inc. | Implantable and rechargeable neural stimulator |
| US8226637B2 (en) | 2005-11-01 | 2012-07-24 | Japan Electel, Inc. | Balloon catheter system |
| US7630760B2 (en) | 2005-11-21 | 2009-12-08 | Cardiac Pacemakers, Inc. | Neural stimulation therapy system for atherosclerotic plaques |
| EP1971285B1 (en) * | 2005-12-30 | 2012-01-18 | C.R.Bard, Inc. | Apparatus for ablation of cardiac tissue |
| WO2007092330A1 (en) | 2006-02-03 | 2007-08-16 | Synecor, Llc | Intravascular device for neuromodulation |
| US8406864B2 (en) | 2006-02-07 | 2013-03-26 | Impulse Dynamics Nv | Assessing cardiac activity |
| US8457763B2 (en) | 2006-04-27 | 2013-06-04 | Medtronic, Inc. | Implantable medical electrical stimulation lead fixation method and apparatus |
| US8005543B2 (en) | 2006-05-08 | 2011-08-23 | Cardiac Pacemakers, Inc. | Heart failure management system |
| US7738966B2 (en) * | 2006-08-21 | 2010-06-15 | Medtronic, Inc. | Features for routing conductors in medical electrical lead electrode assemblies |
| US7801604B2 (en) | 2006-08-29 | 2010-09-21 | Cardiac Pacemakers, Inc. | Controlled titration of neurostimulation therapy |
| US8620422B2 (en) | 2006-09-28 | 2013-12-31 | Cvrx, Inc. | Electrode array structures and methods of use for cardiovascular reflex control |
| US7881803B2 (en) | 2006-10-18 | 2011-02-01 | Boston Scientific Neuromodulation Corporation | Multi-electrode implantable stimulator device with a single current path decoupling capacitor |
| BRPI0717392A2 (pt) | 2006-10-22 | 2013-10-15 | Idev Technologies Inc | Métodos para fixar extremidades de fio e os dispositivos resultantes |
| US9643004B2 (en) | 2006-10-31 | 2017-05-09 | Medtronic, Inc. | Implantable medical elongated member with adhesive elements |
| US7805194B1 (en) | 2006-11-03 | 2010-09-28 | Pacesetter, Inc. | Matrix optimization method of individually adapting therapy in an implantable cardiac therapy device |
| US8311633B2 (en) | 2006-12-04 | 2012-11-13 | Synecor Llc | Intravascular implantable device having superior anchoring arrangement |
| WO2008070189A2 (en) | 2006-12-06 | 2008-06-12 | The Cleveland Clinic Foundation | Method and system for treating acute heart failure by neuromodulation |
| US8706212B2 (en) | 2006-12-13 | 2014-04-22 | Cardiac Pacemakers, Inc. | Neural stimulation systems, devices and methods |
| US8337518B2 (en) | 2006-12-20 | 2012-12-25 | Onset Medical Corporation | Expandable trans-septal sheath |
| US8005545B2 (en) | 2007-01-24 | 2011-08-23 | Bio Control Medical (B.C.M.) Ltd. | Parasympathetic stimulation for prevention and treatment of atrial fibrillation |
| US8150521B2 (en) | 2007-03-15 | 2012-04-03 | Cvrx, Inc. | Methods and devices for controlling battery life in an implantable pulse generator |
| US8406877B2 (en) | 2007-03-19 | 2013-03-26 | Cardiac Pacemakers, Inc. | Selective nerve stimulation with optionally closed-loop capabilities |
| WO2008135985A1 (en) | 2007-05-02 | 2008-11-13 | Earlysense Ltd | Monitoring, predicting and treating clinical episodes |
| US7970871B2 (en) | 2007-05-02 | 2011-06-28 | Synapse Wireless, Inc. | Systems and methods for dynamically configuring node behavior in a sensor network |
| US20090018596A1 (en) | 2007-05-15 | 2009-01-15 | Cvrx, Inc. | Baroreflex activation therapy device with pacing cardiac electrical signal detection capability |
| US8901878B2 (en) | 2007-06-05 | 2014-12-02 | Impulse Dynamics Nv | Transcutaneous charging device |
| WO2009005634A1 (en) | 2007-07-03 | 2009-01-08 | Synecor, Llc | Devices for treating gastroesophageal reflux disease and hiatal hernia, and methods of treating gastroesophageal reflux disease and hiatal hernia using same |
| US20090012542A1 (en) | 2007-07-03 | 2009-01-08 | Synecor, Llc | Satiation devices and methods for controlling obesity |
| US8249717B2 (en) | 2007-07-18 | 2012-08-21 | Cardiac Pacemakers, Inc. | Systems and methods for providing neural stimulation transitions |
| US7848812B2 (en) | 2007-07-20 | 2010-12-07 | Cvrx, Inc. | Elective service indicator based on pulse count for implantable device |
| US7676266B1 (en) | 2007-07-30 | 2010-03-09 | Pacesetter, Inc. | Monitoring ventricular synchrony |
| US8060218B2 (en) | 2007-08-02 | 2011-11-15 | Synecor, Llc | Inductive element for intravascular implantable devices |
| US8027724B2 (en) | 2007-08-03 | 2011-09-27 | Cardiac Pacemakers, Inc. | Hypertension diagnosis and therapy using pressure sensor |
| US8265736B2 (en) | 2007-08-07 | 2012-09-11 | Cardiac Pacemakers, Inc. | Method and apparatus to perform electrode combination selection |
| US8204596B2 (en) | 2007-10-31 | 2012-06-19 | Synecor Llc | Isolation connector for an intravascular implantable medical device |
| US8527064B2 (en) | 2007-12-12 | 2013-09-03 | Cardiac Pacemakers, Inc. | System for stimulating autonomic targets from pulmonary artery |
| US8155744B2 (en) | 2007-12-13 | 2012-04-10 | The Cleveland Clinic Foundation | Neuromodulatory methods for treating pulmonary disorders |
| US9399127B2 (en) | 2007-12-21 | 2016-07-26 | Boston Scientific Neuromodulation Corporation | Neurostimulation lead with stiffened proximal array |
| US8216225B2 (en) | 2007-12-21 | 2012-07-10 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Irrigated ablation electrode assembly having a polygonal electrode |
| US9005106B2 (en) | 2008-01-31 | 2015-04-14 | Enopace Biomedical Ltd | Intra-aortic electrical counterpulsation |
| US8538535B2 (en) | 2010-08-05 | 2013-09-17 | Rainbow Medical Ltd. | Enhancing perfusion by contraction |
| US20150151121A1 (en) | 2008-01-31 | 2015-06-04 | Enopace Biomedical Ltd. | Enhancing perfusion by contraction |
| US20140114377A1 (en) | 2008-01-31 | 2014-04-24 | Enopace Biomedical Ltd. | Vagus nerve stimulation |
| US8626299B2 (en) | 2008-01-31 | 2014-01-07 | Enopace Biomedical Ltd. | Thoracic aorta and vagus nerve stimulation |
| US8626290B2 (en) | 2008-01-31 | 2014-01-07 | Enopace Biomedical Ltd. | Acute myocardial infarction treatment by electrical stimulation of the thoracic aorta |
| WO2009111528A2 (en) | 2008-03-05 | 2009-09-11 | Robert Hoch | Pressure sensing catheter |
| US7925352B2 (en) | 2008-03-27 | 2011-04-12 | Synecor Llc | System and method for transvascularly stimulating contents of the carotid sheath |
| EP2310077A1 (en) | 2008-04-30 | 2011-04-20 | Medtronic, Inc. | Techniques for placing medical leads for electrical stimulation of nerve tissue |
| US20110160827A1 (en) | 2008-05-02 | 2011-06-30 | Medtronic. Inc. | Electrode lead system |
| US8103360B2 (en) | 2008-05-09 | 2012-01-24 | Foster Arthur J | Medical lead coil conductor with spacer element |
| WO2009140291A2 (en) | 2008-05-13 | 2009-11-19 | Proteus Biomedical, Inc. | Continuous field tomography systems and methods of using the same |
| US8239037B2 (en) | 2008-07-06 | 2012-08-07 | Synecor Llc | Intravascular implant anchors having remote communication and/or battery recharging capabilities |
| US8160701B2 (en) | 2008-07-08 | 2012-04-17 | Cardiac Pacemakers, Inc. | Systems and methods for delivering vagal nerve stimulation |
| US9717914B2 (en) | 2008-09-16 | 2017-08-01 | Pacesetter, Inc. | Use of cardiohemic vibration for pacing therapies |
| WO2010042790A2 (en) | 2008-10-10 | 2010-04-15 | Cardiac Pacemakers, Inc. | Multi-sensor strategy for heart failure patient management |
| US8386053B2 (en) | 2008-10-31 | 2013-02-26 | Medtronic, Inc. | Subclavian ansae stimulation |
| US8712550B2 (en) | 2008-12-30 | 2014-04-29 | Biosense Webster, Inc. | Catheter with multiple electrode assemblies for use at or near tubular regions of the heart |
| US8685093B2 (en) | 2009-01-23 | 2014-04-01 | Warsaw Orthopedic, Inc. | Methods and systems for diagnosing, treating, or tracking spinal disorders |
| US8271099B1 (en) * | 2009-03-23 | 2012-09-18 | Advanced Neuromodulation Systems, Inc. | Implantable paddle lead comprising compressive longitudinal members for supporting electrodes and method of fabrication |
| US8706230B2 (en) | 2009-04-23 | 2014-04-22 | Impulse Dynamics Nv | Implantable lead connector |
| US20110066017A1 (en) | 2009-09-11 | 2011-03-17 | Medtronic, Inc. | Method and apparatus for post-shock evaluation using tissue oxygenation measurements |
| WO2011041638A2 (en) | 2009-10-02 | 2011-04-07 | Cardiofocus, Inc. | Cardiac ablation system with automatic safety shut-off feature |
| JP5503012B2 (ja) | 2009-10-30 | 2014-05-28 | カーディアック ペースメイカーズ, インコーポレイテッド | 迷走神経サージと反応とを用いるペースメーカ |
| US9339202B2 (en) | 2009-11-03 | 2016-05-17 | Vivaquant Llc | System for processing physiological data |
| US8979839B2 (en) | 2009-11-13 | 2015-03-17 | St. Jude Medical, Inc. | Assembly of staggered ablation elements |
| AU2010332112B2 (en) | 2009-12-14 | 2015-06-04 | Mayo Foundation For Medical Education And Research | Device and method for treating cardiac disorders by modulating autonomic response |
| US8249706B2 (en) | 2010-01-26 | 2012-08-21 | Pacesetter, Inc. | Adaptive rate programming control in implantable medical devices using ventricular-arterial coupling surrogates |
| US9050453B2 (en) | 2010-03-19 | 2015-06-09 | National Cerebral And Cardiovascular Center | Electrostimulation system, and electrostimulation electrode assembly and biological implantable electrode therefore |
| AU2011239668B2 (en) | 2010-04-15 | 2014-04-17 | Cardiac Pacemakers, Inc. | Autonomic modulation using transient response with intermittent neural stimulation |
| US8423134B2 (en) | 2010-04-29 | 2013-04-16 | Medtronic, Inc. | Therapy using perturbation and effect of physiological systems |
| US9408661B2 (en) | 2010-07-30 | 2016-08-09 | Patrick A. Haverkost | RF electrodes on multiple flexible wires for renal nerve ablation |
| EP2415396B1 (de) | 2010-08-06 | 2016-08-17 | BIOTRONIK SE & Co. KG | Herzmonitor |
| EP2608840B1 (de) | 2010-08-26 | 2017-10-25 | Acandis GmbH & Co. KG | Elektrode für medizinische anwendungen, system mit einer elektrode und verfahren zur herstellung einer elektrode |
| US8934956B2 (en) | 2010-08-31 | 2015-01-13 | Interventional Autonomics Corporation | Intravascular electrodes and anchoring devices for transvascular stimulation |
| WO2012149511A2 (en) | 2011-04-28 | 2012-11-01 | Synecor Llc | Neuromodulation systems and methods for treating acute heart failure syndromes |
| US20150150508A1 (en) | 2010-08-31 | 2015-06-04 | Interventional Autonomics Corporation | Intravascular electrodes and anchoring devices for transvascular stimulation |
| US20130018444A1 (en) | 2011-07-11 | 2013-01-17 | Glenn Richard A | Intravascular electrodes for transvascular stimulation |
| JP5577469B2 (ja) | 2010-09-15 | 2014-08-20 | カーディアック ペースメイカーズ, インコーポレイテッド | 神経刺激リードのリード構成の自動選択 |
| US20120101413A1 (en) * | 2010-10-20 | 2012-04-26 | Medtronic Ardian Luxembourg S.a.r.I. | Catheter apparatuses having expandable mesh structures for renal neuromodulation and associated systems and methods |
| EP2632535B1 (en) | 2010-10-29 | 2016-08-17 | CVRx, Inc. | Implant tool and improved electrode design for minimally invasive procedure |
| EP2640280B1 (en) | 2010-11-16 | 2022-03-16 | TVA Medical, Inc. | Devices for forming a fistula |
| US8781582B2 (en) | 2011-01-19 | 2014-07-15 | Medtronic, Inc. | Vagal stimulation |
| US20120197141A1 (en) | 2011-01-28 | 2012-08-02 | Pacesetter, Inc. | Implantable echo doppler flow sensor for monitoring of hemodynamics |
| US20120283585A1 (en) * | 2011-02-10 | 2012-11-08 | Werneth Randell L | Atrial Appendage Occlusion and Arrhythmia Treatment |
| JP5331836B2 (ja) | 2011-02-21 | 2013-10-30 | コヴィディエン リミテッド パートナーシップ | 管路内に閉塞装置を供給して展開するためのシステム及び方法 |
| US8983601B2 (en) | 2011-02-25 | 2015-03-17 | The Cleveland Clinic Foundation | Extravascular neuromodulation to treat heart failure |
| US20120232563A1 (en) | 2011-03-08 | 2012-09-13 | Medtronic, Inc. | Implant catheters for physiological pacing |
| US8734388B2 (en) | 2011-04-01 | 2014-05-27 | Rutgers, The State University Of New Jersey | Catheter for minimally invasive cardiac pacing surgery and method of use |
| AU2012246721B2 (en) * | 2011-04-22 | 2014-07-17 | Topera, Inc. | Basket style cardiac mapping catheter having a flexible electrode assembly for detection of cardiac rhythm disorders |
| WO2013003368A1 (en) | 2011-06-28 | 2013-01-03 | Boston Scientific Neuromodulation Corporation | System and method for using impedance to determine proximity and orientation of segmented electrodes |
| WO2013022543A2 (en) | 2011-07-11 | 2013-02-14 | Synecor Llc | Catheter system for acute neuromodulation |
| US20130072995A1 (en) | 2011-07-11 | 2013-03-21 | Terrance Ransbury | Catheter system for acute neuromodulation |
| US9446240B2 (en) | 2011-07-11 | 2016-09-20 | Interventional Autonomics Corporation | System and method for neuromodulation |
| US8855783B2 (en) | 2011-09-09 | 2014-10-07 | Enopace Biomedical Ltd. | Detector-based arterial stimulation |
| WO2013043592A1 (en) | 2011-09-19 | 2013-03-28 | Boston Scientific Scimed, Inc. | Subintimal re-entry catheter and retrograde recanalization |
| US10463259B2 (en) | 2011-10-28 | 2019-11-05 | Three Rivers Cardiovascular Systems Inc. | System and apparatus comprising a multi-sensor catheter for right heart and pulmonary artery catheterization |
| WO2013074813A1 (en) | 2011-11-15 | 2013-05-23 | Boston Scientific Scimed, Inc. | Device and methods for renal nerve modulation monitoring |
| US9005100B2 (en) | 2011-12-15 | 2015-04-14 | The Board Of Trustees Of The Leland Stanford Jr. University | Apparatus and methods for treating pulmonary hypertension |
| US8825130B2 (en) | 2011-12-30 | 2014-09-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Electrode support structure assemblies |
| US20140074148A1 (en) | 2012-02-21 | 2014-03-13 | Synecor Llc | Embolic protection system and method for use in an aortic arch |
| US9314299B2 (en) | 2012-03-21 | 2016-04-19 | Biosense Webster (Israel) Ltd. | Flower catheter for mapping and ablating veinous and other tubular locations |
| US9827413B2 (en) | 2012-04-17 | 2017-11-28 | Boston Scientific Neuromodulation Corporation | Lead construction for deep brain stimulation |
| WO2013165920A1 (en) | 2012-04-29 | 2013-11-07 | Synecor Llc | Intravascular electrode arrays for neuromodulation |
| US11395921B2 (en) | 2012-04-29 | 2022-07-26 | Nuxcel2 Llc | Intravascular electrode arrays for neuromodulation |
| EP2858711B1 (en) | 2012-06-06 | 2018-03-07 | Magenta Medical Ltd. | Prosthetic renal valve |
| WO2014007871A1 (en) | 2012-07-05 | 2014-01-09 | Mc10, Inc. | Catheter device including flow sensing |
| US9707076B2 (en) | 2012-08-23 | 2017-07-18 | Minimally Invasive Surgical Access Limited | Direct aortic access system for transcatheter aortic valve procedures |
| WO2014032038A1 (en) | 2012-08-24 | 2014-02-27 | Synecor Llc | System for facilitating transcatheter aortic valve procedures using femoral access |
| US9833608B2 (en) | 2012-11-20 | 2017-12-05 | NeuroTronik IP Holding (Jersey) Limited | Positioning methods for intravascular electrode arrays for neuromodulation |
| US11202904B2 (en) | 2012-11-20 | 2021-12-21 | Nuxcel Limited | Positioning methods for intravascular electrode arrays for neuromodulation |
| US9446243B2 (en) | 2012-12-07 | 2016-09-20 | Boston Scientific Neuromodulation Corporation | Patient posture determination and stimulation program adjustment in an implantable stimulator device using impedance fingerprinting |
| WO2014093178A2 (en) | 2012-12-14 | 2014-06-19 | Boston Scientific Neuromodulation Corporation | Method for automation of therapy-based programming in a tissue stimulator user interface |
| JP6437997B2 (ja) | 2013-03-12 | 2018-12-12 | カーディアック ペースメイカーズ, インコーポレイテッド | 複数のセンサの融合を備えた医療デバイス |
| CN113616920A (zh) | 2013-03-13 | 2021-11-09 | 马真塔医药有限公司 | 血液泵浦装置及制造血液泵浦的方法 |
| US9494960B2 (en) | 2013-03-14 | 2016-11-15 | Boston Scientific Neuromodulation Corporation | Voltage regulator programmable as a function of load current |
| CN105163802B (zh) | 2013-03-15 | 2017-08-15 | 波士顿科学神经调制公司 | 用于在单个信道中提供多个调制图案的神经调制系统 |
| US10098694B2 (en) | 2013-04-08 | 2018-10-16 | Apama Medical, Inc. | Tissue ablation and monitoring thereof |
| WO2014204980A1 (en) | 2013-06-18 | 2014-12-24 | Cardiac Pacemakers, Inc. | System and method for mapping baroreceptors |
| EP3019105B1 (en) * | 2013-07-11 | 2017-09-13 | Boston Scientific Scimed, Inc. | Devices for nerve modulation |
| JP2016527959A (ja) * | 2013-07-22 | 2016-09-15 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 腎神経アブレーション用医療器具 |
| US9326816B2 (en) | 2013-08-30 | 2016-05-03 | Medtronic Ardian Luxembourg S.A.R.L. | Neuromodulation systems having nerve monitoring assemblies and associated devices, systems, and methods |
| EP3057488B1 (en) | 2013-10-14 | 2018-05-16 | Boston Scientific Scimed, Inc. | High resolution cardiac mapping electrode array catheter |
| WO2015084774A1 (en) | 2013-12-05 | 2015-06-11 | Cardiac Pacemakers, Inc. | Dosed delivery of autonomic modulation therapy |
| US9764113B2 (en) | 2013-12-11 | 2017-09-19 | Magenta Medical Ltd | Curved catheter |
| CN106456969A (zh) | 2014-03-09 | 2017-02-22 | 神经体化知识产权控股(泽西岛)有限公司 | 心脏交感和副交感神经的神经调节系统和方法 |
| US9415224B2 (en) | 2014-04-25 | 2016-08-16 | Cyberonics, Inc. | Neurostimulation and recording of physiological response for the treatment of chronic cardiac dysfunction |
| US9597515B2 (en) | 2014-03-28 | 2017-03-21 | Cardiac Pacemakers, Inc. | Systems and methods for facilitating selection of one or more vectors in a medical device |
| US20150328448A1 (en) | 2014-05-13 | 2015-11-19 | Biotronik Ag | Electrode element for electromedical therapy in a human or animal body |
| CN111790047B (zh) | 2014-05-22 | 2022-09-27 | 卡迪诺米克公司 | 用于电神经调制的导管和导管系统 |
| JP2017522923A (ja) | 2014-06-03 | 2017-08-17 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 非外傷性の遠位チップを備えた電極アセンブリ |
| JP2017516588A (ja) | 2014-06-04 | 2017-06-22 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 電極組立体 |
| CN104224315A (zh) | 2014-08-05 | 2014-12-24 | 上海魅丽纬叶医疗科技有限公司 | 具有网管状支架结构的射频消融导管及其设备 |
| US20170312525A1 (en) | 2014-08-06 | 2017-11-02 | NeuroTronik IP Holding (Jersey) Limited | Systems and methods for neuromodulation of sympathetic and parasympathetic cardiac nerves |
| EP3177361A4 (en) | 2014-08-06 | 2018-05-02 | Neuro Tronik IP Holding Jersey Limited | Electrodes and electrode positioning systems for transvascular neuromodulation |
| CA2957791A1 (en) | 2014-09-08 | 2016-03-17 | CARDIONOMIC, Inc. | Catheter and electrode systems for electrical neuromodulation |
| WO2016040038A1 (en) | 2014-09-08 | 2016-03-17 | CARDIONOMIC, Inc. | Methods for electrical neuromodulation of the heart |
| EP3212270B1 (en) | 2014-10-30 | 2019-09-04 | Kardium Inc. | Catheter system |
| US20160174864A1 (en) | 2014-12-18 | 2016-06-23 | Biosense Webster (Israel) Ltd. | Far Field-Insensitive Intracardiac Catheter Electrodes |
| AU2016205495B2 (en) | 2015-01-05 | 2018-08-02 | CARDIONOMIC, Inc. | Cardiac modulation facilitation methods and systems |
| US20180236220A1 (en) | 2015-01-14 | 2018-08-23 | NeuroTronik IP Holding (Jersey) Limited | Inflatable intravascular electrode supports for neuromodulation |
| CN107405491B (zh) | 2015-01-30 | 2021-06-01 | 心脏起搏器股份公司 | 生理事件检测和数据存储 |
| CA3021573A1 (en) | 2015-04-13 | 2016-10-20 | NeuroTronik IP Holding (Jersey) Limited | Systems and methods for generating therapeutic electric fields for capture of nervous system targets |
| WO2016176333A1 (en) | 2015-04-27 | 2016-11-03 | Reflex Medical, Inc. | Systems and mehtods for sympathetic cardiopulmonary neuromodulation |
| EP3302602A1 (en) | 2015-06-04 | 2018-04-11 | Jozef Reinier Cornelis Jansen | Method and computer system for processing a heart sensor output |
| CA2987936A1 (en) | 2015-06-05 | 2016-12-08 | Neuronano Ab | Method and system for improving stimulation of excitable tissue |
| US20170065818A1 (en) | 2015-09-08 | 2017-03-09 | Interventional Autonomics Corporation | Neuromodulation Systems and Methods for Treating Acute Heart Failure Syndromes |
| EP3397149A4 (en) | 2015-12-30 | 2019-08-14 | Schuler Scientific Solutions, LLC | CARTOGRAPHY AND TREATMENT OF TISSUE |
| CA3015372A1 (en) | 2016-03-09 | 2017-09-14 | CARDIONOMIC, Inc. | Cardiac contractility neurostimulation systems and methods |
| US11026619B2 (en) | 2016-04-13 | 2021-06-08 | Cardiac Pacemakers, Inc. | Determining cardiac pacing capture effectiveness of an implantable medical device |
| US10292844B2 (en) | 2016-05-17 | 2019-05-21 | Medtronic Vascular, Inc. | Method for compressing a stented prosthesis |
| JP7071350B2 (ja) * | 2016-10-27 | 2022-05-18 | コンフォーマル・メディカル・インコーポレイテッド | 左心耳を排除するためのデバイスおよび方法 |
| KR20200010161A (ko) | 2016-11-22 | 2020-01-30 | 시네코어 엘엘씨 | 승모판의 치료 장치를 위한 비가이드와이어 중격경유 전달 시스템 |
| US20180214697A1 (en) | 2017-01-31 | 2018-08-02 | NeuroTronik IP Holding (Jersey) Limited | Enhancing left ventricular relaxation through neuromodulation |
| EP3606425B1 (en) | 2017-04-05 | 2022-06-01 | Medtronic Vascular Inc. | Sizing catheters, methods of sizing anatomies and methods of selecting a prosthesis for implantation |
| WO2019055154A2 (en) | 2017-08-06 | 2019-03-21 | Synecor Llc | SYSTEMS AND METHODS FOR THE TRANSSEPTIVE DELIVERY OF HEART THERAPEUTIC DEVICES |
| EP3664703A4 (en) | 2017-09-13 | 2021-05-12 | Cardionomic, Inc. | NEUROSTIMULATION SYSTEMS AND METHODS FOR INFLUENCING HEART CONTRACTILITY |
| CN112839602A (zh) | 2018-08-13 | 2021-05-25 | 卡迪诺米克公司 | 用于影响心脏收缩性和/或松弛性的系统和方法 |
| US20200194771A1 (en) | 2018-12-12 | 2020-06-18 | NeuroTronik IP Holding (Jersey) Limited | Medical electrodes having enhanced charge capacities, and methods of manufacturing |
| US11382578B2 (en) | 2018-12-12 | 2022-07-12 | Nuxcel Limited | Fluorscopic markers for single view positioning |
| US20200187805A1 (en) | 2018-12-12 | 2020-06-18 | NeuroTronik IP Holding (Jersey) Limited | Medical electrodes using flexible circuits, and methods of manufacturing |
| US11364377B2 (en) | 2019-02-07 | 2022-06-21 | Synecor Llc | Instrument for facilitating transseptal delivery of cardiac therapeutic devices |
| US20210220131A1 (en) | 2019-02-27 | 2021-07-22 | Synecor Llc | Transseptal delivery system and methods for therapeutic devices of the aortic valve |
| SG11202111619WA (en) | 2019-05-06 | 2021-11-29 | Cardionomic Inc | Systems and methods for denoising physiological signals during electrical neuromodulation |
| AU2021293019A1 (en) | 2020-06-16 | 2023-02-23 | CARDIONOMIC, Inc. | Chronically implantable systems and methods for affecting cardiac contractility and/or relaxation |
-
2019
- 2019-08-12 CN CN201980067356.8A patent/CN112839602A/zh active Pending
- 2019-08-12 AU AU2019320750A patent/AU2019320750A1/en active Pending
- 2019-08-12 SG SG11202101191PA patent/SG11202101191PA/en unknown
- 2019-08-12 CA CA3107959A patent/CA3107959A1/en active Pending
- 2019-08-12 WO PCT/US2019/046202 patent/WO2020036886A1/en unknown
- 2019-08-12 JP JP2021506698A patent/JP2021535776A/ja active Pending
- 2019-08-12 EP EP19849636.6A patent/EP3836859A4/en active Pending
-
2020
- 2020-09-11 US US17/018,887 patent/US11077298B2/en active Active
-
2021
- 2021-02-01 IL IL280566A patent/IL280566A/en unknown
- 2021-08-02 US US17/391,316 patent/US11648395B2/en active Active
-
2023
- 2023-04-06 US US18/296,873 patent/US20230390551A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2020036886A1 (en) | 2020-02-20 |
| WO2020036886A9 (en) | 2020-10-08 |
| EP3836859A4 (en) | 2022-05-11 |
| IL280566A (en) | 2021-03-25 |
| US20230390551A1 (en) | 2023-12-07 |
| US20210001116A1 (en) | 2021-01-07 |
| US11648395B2 (en) | 2023-05-16 |
| JP2021535776A (ja) | 2021-12-23 |
| SG11202101191PA (en) | 2021-03-30 |
| AU2019320750A1 (en) | 2021-04-08 |
| US20210370055A1 (en) | 2021-12-02 |
| US11077298B2 (en) | 2021-08-03 |
| CA3107959A1 (en) | 2020-02-20 |
| EP3836859A1 (en) | 2021-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7410194B2 (ja) | 心収縮神経刺激システムおよび方法 | |
| CN112839602A (zh) | 用于影响心脏收缩性和/或松弛性的系统和方法 | |
| US20200206511A1 (en) | Neurostimulation systems and methods for affecting cardiac contractility | |
| CN116075335A (zh) | 用于影响心脏收缩性和/或松弛的长期可植入系统和方法 | |
| US20240130671A1 (en) | Neurostimulation devices and methods | |
| WO2023150489A2 (en) | Methods and systems for neuromodulation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |