CN112477884B - 自动驾驶控制方法、装置及车辆 - Google Patents
自动驾驶控制方法、装置及车辆 Download PDFInfo
- Publication number
- CN112477884B CN112477884B CN202011256172.7A CN202011256172A CN112477884B CN 112477884 B CN112477884 B CN 112477884B CN 202011256172 A CN202011256172 A CN 202011256172A CN 112477884 B CN112477884 B CN 112477884B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- habit
- characteristic value
- lane
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
- B60W2754/30—Longitudinal distance
Abstract
本发明公开了一种自动驾驶控制方法、装置及车辆,该方法包括:当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;根据驾驶数据,确定目标车辆的驾驶习惯信息;基于驾驶习惯信息,调整本车的跟车距离和/或变道策略,以便进一步根据调整后的跟车距离和/或变道策略控制本车的行驶。通过学习到的周围目标车辆的驾驶习惯,来调整本车的跟车距离和/或变道策略,使得本车跟车及变道行为更灵活,有利于提高自动驾驶控制的可靠性。
Description
技术领域
本发明涉及自动驾驶技术领域,尤其涉及一种自动驾驶控制方法、装置及车辆。
背景技术
随着科学技术的发展,自动驾驶技术的研究越来越受到人们的关注。HWA(HighwayAssist,高速辅助)/HWP(Highway Pilot,高速领航)在高速路段会自动纵向控制及横向车道保持,如果前车过慢,雷达探测到旁边车道的后车在现有位置和速度下没有碰撞风险,则系统可支持自动变道。
而HWA中的纵向控制,是首先通过驾驶员在ACC(Adaptive Cruise Control,自适应巡航控制)里设定跟车距离偏好:远,中,近。然后车辆根据与前车的碰撞时间(TTC,TimeTo Collision)及道路限速,按照主机厂标定好的参数选择加减速度&加减速度变化率,控制车辆加减速。HWA中的横向控制,非变道情况同车道居中保持功能,变道功能根据自车和前车速度差,旁边车道后车与本车的TTC阈值判断是否可变道。这种固有跟车以及变道模式,对于不同驾驶风格如激进或保守的周边驾驶员例无法适配,容易导致同一工况下跟随前车刹车过猛,迟迟无法变道或因为后车突然加速变道失败。
因此,如何提供一种更舒适且更可靠的自动驾驶控制方案,是目前急需解决的问题。
发明内容
本发明提供了一种自动驾驶控制方法、装置及车辆,能够适配周边车辆驾驶习惯,更灵活地决定跟车距离和/或变道策略,有利于提高自动驾驶控制的可靠性,使得乘员体验更舒适。
第一方面,本说明书实施例提供了一种自动驾驶控制方法,所述方法包括:当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息;基于所述驾驶习惯信息,调整本车的跟车距离和/或变道策略。
进一步地,所述根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息,包括:从所述目标车辆的驾驶数据中确定纵向驾驶数据,并基于所述纵向驾驶数据,确定所述目标车辆的纵向习惯特征值,其中,所述纵向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的纵向驾驶习惯。
进一步地,所述目标车辆包括本车所在车道的前车,上述基于所述驾驶习惯信息,调整本车的跟车距离,包括:基于第一预设系数以及所述前车的纵向习惯特征值,调整本车的跟车距离。
进一步地,所述目标车辆包括本车所在车道的前车。上述基于所述驾驶习惯信息,调整本车的变道策略,包括:基于第二预设系数以及所述前车的纵向习惯特征值,调整第一预设变道条件,所述第一预设变道条件为根据所述前车与本车之间的速度差确定是否触发本车变道的判断条件。
进一步地,所述目标车辆包括侧后方车辆,所述侧后方车辆为位于本车相邻车道且行驶在本车后方的车辆。上述基于所述驾驶习惯信息,调整本车的变道策略,包括:基于第三预设系数以及所述侧后方车辆的纵向习惯特征值,调整第二预设变道条件,所述第二预设变道条件为根据所述侧后方车辆与本车的纵向距离确定是否触发本车变道的判断条件。
进一步地,所述根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息,包括:从所述目标车辆的驾驶数据中确定横向驾驶数据,并基于所述横向驾驶数据,确定所述目标车辆的横向习惯特征值,其中,所述横向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的横向驾驶习惯。
进一步地,所述根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息,包括:从所述目标车辆的驾驶数据中确定车道线距离数据,并基于所述车道线距离数据,确定所述目标车辆的车道线距离习惯特征值,其中,所述车道线距离习惯特征值用于表征所述目标车辆在相应车道中行驶的位置习惯。
进一步地,所述目标车辆包括本车所在车道的前车。所述方法还包括:当本车处在伴行直行状态时,若所述前车的横向习惯特征值小于本车的横向习惯特征值,且所述前车的车道线距离习惯特征值小于预设阈值,则检测所述前车在指定时间长度内的横向移动距离是否大于预设距离,若是,则控制本车跟随所述前车进行横向移动。
第二方面,本说明书实施例提供了一种自动驾驶控制装置,所述装置包括:获取模块,用于当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;习惯确定模块,用于根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息;调整模块,用于基于所述驾驶习惯信息,调整本车的跟车距离和/或变道策略。
第三方面,本说明书实施例提供了一种车辆,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述第一方面提供的自动驾驶控制方法的步骤。
本说明书一个实施例提供的自动驾驶控制方法,通过在伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据,然后根据这段时间的驾驶数据,确定目标车辆的驾驶习惯信息,从而基于学习到的驾驶习惯信息,调整本车的跟车距离和/或变道策略,以便进一步根据调整后的跟车距离和/或变道策略控制本车的行驶。上述方案中,通过学习到的周围目标车辆的驾驶习惯,来调整本车的跟车距离和/或变道策略,使得本车跟车及变道行为更灵活,与伴行车辆之间的路权交互更默契,有利于提高自动驾驶控制的可靠性,使得乘员体验更舒适。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本说明书的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
图1为本说明书实施例第一方面提供的一种自动驾驶控制方法的流程图;
图2为本说明书实施例第二方面提供的一种自动驾驶控制装置的模块框图;
图3为本说明书实施例第三方面提供的一种车辆的结构示意图。
具体实施方式
本申请发明人经过长期研究发现,由于目前自动驾驶车辆的跟车策略以及变道策略是固定的,无法和具有不同驾驶习惯的伴行车辆灵活适配。在伴行直行状态下,本车所跟随的前车可能需要频繁加减速,如果遇到前车驾驶习惯比一般车辆激进,每次刹车减速度大,则本车按照固定策略的跟车距离将很容易进入高制动力的区间,急刹较多,导致本车舒适性差;在伴行需变道情况下,例如,相邻车道后车距离的TTC(Time To Collision,预测碰撞接触时间)需要达到4秒,如果相邻车道后车驾驶员本身驾驶习惯保守,但车距TTC略低于4秒,则本车也迟迟无法变道,阻碍他车超车。因此,固定的跟车策略以及变道策略影响了自动驾驶控制的可靠性,无法与不同驾驶风格的周边车辆适配,不利于提高乘车体验,也不利于与周边车辆进行友好的路权交互。
有鉴于此,本说明书实施例提供了一种自动驾驶控制方法、装置以及车辆,能够通过学习到的周围目标车辆的驾驶习惯,来调整本车的跟车距离和/或变道策略,使得本车跟车及变道行为更灵活,与伴行车辆之间的路权交互更默契,有利于提高自动驾驶控制的可靠性,使得乘员体验更舒适。
为了更好的理解本说明书实施例提供的技术方案,下面通过附图以及具体实施例对本说明书实施例的技术方案做详细的说明,应当理解本说明书实施例以及实施例中的具体特征是对本说明书实施例技术方案的详细的说明,而不是对本说明书技术方案的限定,在不冲突的情况下,本说明书实施例以及实施例中的技术特征可以相互组合。
本说明书实施例中,术语“多个”表示“两个以上”,即包括两个或大于两个的情况;术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,A1和/或A2,可以表示:单独存在A1,同时存在A1和A2,单独存在A2这三种情况。
需要说明的是,本文中,前车是指与本车行驶在同一车道,且行驶在本车前方,与本车相邻的车辆。伴行状态是指在高速/类高速道路中,轻微拥堵情况下,车辆以松散的群体状态按正常速度行驶(如60km/h以上)。此时随着道路状况变化(如部分车辆速度过低,车道小型障碍物等),自动驾驶车辆仍然需要加减速及做变道动作。自动驾驶是指SAE L2及以上的智能驾驶,可自动控制加减速及横向位移。TTC是指基于当前运动状态预估接触到目标物的时间。
第一方面,本说明书实施例提供了一种自动驾驶控制方法,如图1所示,该方法至少可以包括以下步骤S101至步骤S103。
步骤S101,当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据。
举例来讲,具有自动驾驶功能的车辆可以为驾驶员提供“智能学习模式”选项,当触发该选项时,就可以在伴行模式下触发本说明书实施例提供的自动驾驶控制方法。当然,该选项可以是在车辆启动时自动触发,也可以由驾驶员自主选择触发。
具体实施过程中,监测本车是否处于伴行状态的实施方式有多种。作为一种实施方式,可以监测驾驶员是否执行预设触发操作,若是,则判定本车处于伴行状态,反之,则不处于伴行状态。例如,预设触发操作可以是点击预设按钮,或者,预设手势操作,又或者,输入语音口令等。
作为另一种实施方式,可以检测本车行驶速度是否大于或等于预设阈值,且以大于或等于预设阈值的行驶速度行驶的持续时间是否达到预设时长;若是,检测在该持续时间段内,本车周围的车辆数据是否大于或等于预设数量,若是,则判定本车处在伴行状态。当然,其中任意一条件不满足,则说明本车没有处在伴行状态。具体实施过程中,预设阈值、预设时长以及预设数量均可以根据实际应用场景的需要设置,例如,预设阈值可以设置为60km/h,预设时长为60秒,预设数量为2。
可以理解的是,在获取本车周围目标车辆在预设时间窗口内的驾驶数据之前,需要先确定伴行状态下本车与前车之间的跟车距离。为了进一步提高伴行状态下本车跟车距离的可靠性,提高乘坐体验,在一种可选的实施例中,确定本车与前车之间的跟车距离的过程可以包括:获取前车的型号,并给基于该型号,确定前车的制动距离;若前车的制动距离低于本车的制动距离的预设倍数,则增加本车与前车之间的跟车距离,其中,预设倍数小于或等于1。
举例来讲,可以通过本车摄像头采集前车轮廓特征和车辆标志,基于本车搭载的图像识别软件,例如采用CNN卷积神经网络算法等,辨别前车的型号(如保时捷911)。通过本车已有车型信息数据库或者车联网在线数据库调取此车型最短百公里/小时至零的制动距离,如果低于本车最短百公里/小时至零的制动距离B%则增加一级跟车距离,即跟车距离增加δD。其中,B小于或等于100,δD为跟车距离调节步长,B和δD均可以根据实际应用场景以及多次试验设置。
在确定与前车的跟车距离后,需要获取本车周围目标车辆在预设时间窗口内的驾驶数据。本实施例中,本车周围目标车辆可以包括:前车,前车以及位于相邻车道且行驶在本车后方的车辆,或者是以本车为圆心,半径X米圆内可扫描到的各车辆。其中,X可以根据实际应用场景以及多次试验设置。
可以理解的是,车辆可以通过车载摄像头、前雷达以及4个角方位的角雷达,识别本车周围各目标车辆的运动信息。例如,可以通过雷达探测这些车辆的横向速度、纵向速度、距离本车的方位角,并且可以分别经过微分处理获得横向加速度、纵向加速度以及横纵向的加速度变化率。又例如,以本车为原点建立极坐标,将摄像头识别车道线映射到极坐标下,通过目标车辆相对本车方位角和距离变化,确定目标车辆在极坐标下的位置。进而判断目标车辆在车道线内是否直线行驶,并测算距车道线距离,如果目标车辆有转弯,则可得到该目标车辆的转向角速度,再进一步经过微分可得转向角速度变化率。另外,通常来讲,车辆均安装有前摄像头,这样对于在本车前方的车辆,距离车道线距离、转向角速度、转向角速度变化率也可通过摄像头图像识别车头和车身变化得到。
在监测到本车处于伴行状态,触发执行本说明书实施例提供的自动驾驶控制方法的时刻为起始时间,在预设时间窗口内采集目标车辆的驾驶数据。预设时间窗口的长度N可以根据实际应用场景以及多次试验设置,例如,N可以设置为20秒或30秒等。
目标车辆的驾驶数据为能够用于学习目标车辆的驾驶习惯的数据,具体包括的数据类型可以根据实际需要确定。下面主要列举了三种数据,在具体实施过程中,也可以包括其他数据,此处不作限制。
第一种,目标车辆的驾驶数据可以包括纵向驾驶数据,即沿车道方向上的行驶数据。例如,纵向驾驶数据可以包括纵向加速度和/或纵向加速度变化率。
第二种,目标车辆的驾驶数据可以包括横向驾驶数据,即垂直于车道方向上的行驶数据。例如,横向驾驶数据可以包括横向加速度和/或横向加速度变化率。又例如,横向驾驶数据可以包括目标车辆变道的转向角速度。
第三种,目标车辆的驾驶数据可以包括车道线距离数据,具体包括目标车辆与两侧车道线之间的距离。
需要说明的是,具体实施过程中,目标车辆的驾驶数据可以以上三种数据的一种或多种组合,具体根据实际需求确定。
步骤S102,根据目标车辆在预设时间窗口内的驾驶数据,确定目标车辆的驾驶习惯信息。
本实施例中,目标车辆的驾驶习惯可以从多个维度表征,下面主要列举了三个维度上的信息进行表征,具体实施过程中,还可以采用其他维度对目标车辆的驾驶习惯进行表征,此处不作限制。
第一种,目标车辆的驾驶习惯信息包括:纵向习惯特征值,用于表征目标车辆在预设时间窗口内的纵向驾驶习惯。此时,上述步骤S102可以包括:从目标车辆的驾驶数据中确定该目标车辆的纵向驾驶数据,并基于纵向驾驶数据,确定目标车辆的纵向习惯特征值。
第二种,目标车辆的驾驶习惯信息包括:横向习惯特征值,用于表征所述目标车辆在所述预设时间窗口内的横向驾驶习惯。此时,上述步骤S102包括:从目标车辆的驾驶数据中确定该目标车辆的横向驾驶数据,并基于横向驾驶数据,确定该目标车辆的横向习惯特征值。
第三种,目标车辆的驾驶习惯信息包括:车道线距离习惯特征值,用于表征目标车辆在相应车道中行驶的位置习惯。此时,上述步骤S102包括:从目标车辆的驾驶数据中确定该目标车辆的车道线距离数据,并基于车道线距离数据,确定该目标车辆的车道线距离习惯特征值。
需要说明的是,具体实施过程中,上述三种维度的信息可以单独用于表征目标车辆的驾驶习惯,也可以任意两种或三种组合在一起表征,此处不作限制。
下面对纵向习惯特征值Yl、横向习惯特征值Yh以及车道线距离习惯特征值Yr的获取方式进行说明。
对于纵向习惯特征值Yl和横向习惯特征值Yh,本说明书实施例主要列举了几种获取方式,具体实施过程中,也可以采用其他获取方式,此处不作限制。
第一种,可以根据预设时间窗口内目标车辆的纵向加速度,确定该目标车辆的纵向习惯特征值;根据预设时间窗口内目标车辆的横向加速度,确定该目标车辆的横向习惯特征值。
可以理解的是,对于同一目标车辆,可认为预设时间窗口内该目标车辆在此段伴行路段的纵向加速度、加速度变化率分别满足单峰分布,此时,可取纵向加速度绝对值平均数 在一种实施方式中,可以将目标车的纵向加速度绝对值平均数
在一种实施方式中,可以将目标车的纵向加速度绝对值平均数 与本车的纵向加速度绝对值平均数
与本车的纵向加速度绝对值平均数 相减,得到的差值作为该目标车辆的纵向习惯特征值,即
相减,得到的差值作为该目标车辆的纵向习惯特征值,即 若该差值大于0,则认为该目标车辆比本车驾驶更激进,若该差值小于0,则认为该目标车辆比本车的更保守。
若该差值大于0,则认为该目标车辆比本车驾驶更激进,若该差值小于0,则认为该目标车辆比本车的更保守。
同理,可认为预设时间窗口内该目标车辆在此段伴行路段的横向加速度、加速度变化率分别满足单峰分布,可取横向加速度绝对值平均数 在一种实施方式中,可以将目标车辆的横向加速度绝对值平均数
在一种实施方式中,可以将目标车辆的横向加速度绝对值平均数 与本车的横向加速度绝对值平均数
与本车的横向加速度绝对值平均数 相减,得到的差值作为该目标车辆的横向习惯特征值,即
相减,得到的差值作为该目标车辆的横向习惯特征值,即 若该差值大于0,则认为该目标车辆比本车驾驶更激进,若该差值小于0,则认为该目标车辆比本车驾驶更保守。
若该差值大于0,则认为该目标车辆比本车驾驶更激进,若该差值小于0,则认为该目标车辆比本车驾驶更保守。
当然,在本说明书其他实施例中,也可以根据需要将目标车的加速度绝对值平均数与本车的加速度绝对值平均数的其它差异值,作为相应的习惯特征值,例如,也可以将 作为目标车辆的纵向习惯特征值,此处不作限制。
作为目标车辆的纵向习惯特征值,此处不作限制。
第二种,可以根据预设时间窗口内目标车辆的纵向加速度变化率,确定该目标车辆的纵向习惯特征值;根据预设时间窗口内目标车辆的横向加速度变化率,确定该目标车辆的横向习惯特征值。
具体来讲,可以将预设时间窗口内采集的目标车辆的纵向加速度变化率绝对值分别取中位数a′el和平均数 作为一种实施方式,可以将中位数a′el与平均数
作为一种实施方式,可以将中位数a′el与平均数 的比值,作为该目标车辆的纵向习惯特征值,即取
的比值,作为该目标车辆的纵向习惯特征值,即取 此时,Yl越接近1,则认为目标车辆驾驶员操作越稳定与精细,也就是说,当|Yl-1|大于第一预设常值Kl,则认为目标车辆驾驶员操作粗糙度高。其中,Kl的值为车辆厂商根据路试和之前项目调试值确定,与车型对应,可进行标定。
此时,Yl越接近1,则认为目标车辆驾驶员操作越稳定与精细,也就是说,当|Yl-1|大于第一预设常值Kl,则认为目标车辆驾驶员操作粗糙度高。其中,Kl的值为车辆厂商根据路试和之前项目调试值确定,与车型对应,可进行标定。
同理,可以将预设时间窗口内采集的目标车辆的横向加速度变化率绝对值分别取中位数a′eh和平均 数。作为一种实施方式,可以将中位数a′eh与平均数
数。作为一种实施方式,可以将中位数a′eh与平均数 的比值,作为该目标车辆的横向习惯特征值,即取
的比值,作为该目标车辆的横向习惯特征值,即取 此时,Yh越接近1,则认为目标车辆驾驶员操作越稳定与精细。也就是说,当|Yh-1|大于第二预设常值Kh,则认为目标车辆驾驶员操作粗糙度高。其中,Kh的值为厂商根据路试和之前项目调试值确定,与车型对应,可进行标定。
此时,Yh越接近1,则认为目标车辆驾驶员操作越稳定与精细。也就是说,当|Yh-1|大于第二预设常值Kh,则认为目标车辆驾驶员操作粗糙度高。其中,Kh的值为厂商根据路试和之前项目调试值确定,与车型对应,可进行标定。
当然,在本说明书其他实施例中,也可以对加速度变化率进行其他处理,得到相应的习惯特征值,例如,也可以将 加上预先根据多次试验标定的修正系数,得到目标车辆的纵向习惯特征值,此处不作限制。
加上预先根据多次试验标定的修正系数,得到目标车辆的纵向习惯特征值,此处不作限制。
第三种,对于横向习惯特征值,还可以根据预设时间窗口内目标车辆变道的转向角速度,确定该目标车辆的变道轨迹,然后,基于该目标车辆的变道轨迹与变道所跨越的车道线之间的夹角,确定该目标车辆的横向习惯特征值。
具体来讲,可以检测目标车辆的变道转向角速度,以转向角不为0为起点,车辆完成变道保持直行为终点此时转向角回到0,得到目标车辆的变道轨迹,取该变道轨迹与该目标车辆所跨越车道线的夹角,作为该目标车辆的横向习惯特征值Yh。
需要说明的是,对于行驶在本车周围半径X米内的各个车辆,均可以采用上述第一种或第二种方式确定横向习惯特征值和纵向习惯特征值。在一种应用场景中,本车只有车前安装有摄像头,此时对于行驶在本车前方的车辆,即本车前摄像头能够监测到的本车前方行驶的所有车道上的车辆,可以采用上述第一种、第二种或第三种方式确定横向习惯特征值,采用上述第一种或第二种方式确定纵向习惯特征值,而对于其他车辆,可以优选采用上述第一种或第二种方式确定横向习惯特征值和纵向习惯特征值。
另外,对于车道线距离习惯特征值Yr,作为一种实施方式,可以针对预设时间窗口内每个采样时刻,获取目标车辆与该目标车辆所在车道左侧车道线之间的第一距离,以及目标车辆与该目标车辆所在车道右侧车道线之间的第二距离,并计算第一距离与第二距离之间的差值;将预设时间窗口内所有采样时刻得到的差值的绝对值取平均,得到平均值,将该平均值作为该目标车辆的车道线距离习惯特征值Yr。
当然,在本说明书其他实施例中,也可以采用其他方式确定目标车辆的车道线距离习惯特征值,此处不做限制。
根据预设时间窗口内目标车辆的驾驶数据学习到目标车辆的驾驶习惯信息后,就可以适配于目标车辆的驾驶习惯,来灵活调整本车的跟车距离和/或变道策略,即执行以下步骤S103。
需要说明的是,假设预设时间窗口的时间长度为N秒,在达到N秒之间均为学习阶段,所得到的习惯特征值不影响本车的跟车距离和/或变道策略,在达到N秒时,则完成当前时间窗口的驾驶习惯学习,基于学习到的习惯特征值,调整本车的跟车距离和/或变道策略。并且在N秒之后,继续记录本车周边目标车辆的驾驶数据,并实时更新驾驶习惯特征值。例如,从第1秒到第N秒为第一个时间窗口,在达到第N秒时,得到初始的驾驶习惯特征值Yl1,Yh1和Yr1,从第2秒到第N+1秒为第二个时间窗口,在达到第N+1秒时,得到驾驶习惯特征值Yl2,Yh2和Yr2,将Yl1,Yh1和Yr1更新为Yl2,Yh2和Yr2,以此类推。
步骤S103,基于目标车辆的驾驶习惯信息,调整本车的跟车距离和/或变道策略。
目标车辆的驾驶习惯信息,能够在一定程度上表征目标车辆的驾驶习惯,快速根据实际目标车辆的驾驶习惯来调整本车的跟车距离和/或变道策略,能够使得本车跟车和/或变道行为更灵活,快速适配不同驾驶风格的周边车辆,提高成员体验的舒适性。并且,是在原本控制策略的基础上进行调整,不改变本车原有功能算法,即不会影响原有算法复杂度。
下面主要列举了几种对跟车距离以及变道策略的调整方式,具体实施过程中,还可以根据实际采用的策略进行其他的调整,此处不作限制。
第一种,跟车距离的调整。具体可以包括:若目标车辆包括前车即本车道有前车,则基于第一预设系数以及前车的纵向习惯特征值,调整本车的跟车距离。
举例来讲,若车辆原方案是根据TTC设定时间制动flag,以TTC 3秒的距离作为跟车距离。此时,若本车道有前车,且前车的纵向习惯特征值为Ylb,则可以在当前跟车距离的基础上进行调整,具体调整值基于第一预设系数以及前车的纵向习惯特征值Ylb确定。其中,第一预设系数为常值系数,为厂商根据路试和纵向习惯特征值的计算方式确定,可以与车型分别对应。
可以理解的是,纵向习惯特征值的获取方式不同,则第一预设系数以及调整值的确定方式也就不同。假设当前跟车距离即调整前的跟车距离表示为T,第一预设系数表示R。
若采用上述第一种纵向习惯特征值获取方式,作为一种实施方式,可以计算第一预设系数与前车的纵向习惯特征值之间的乘积,将本车的当前跟车距离加上该乘积,作为调整后的跟车距离,即调整后的跟车距离T′=T+R*Ylb。也就是说,是在调整前的跟车距离的基础上,增加R*Ylb米。如果前车的驾驶习惯更激进,则Ylb>0,此时增加正数,本车离前车更远;如果前车的驾驶习惯更保守,Ylb<0,此时增加负数,本车离前车更近。当然,在本说明书其他实施例中,也可以采用其他调整方式。
若采用上述第二种纵向习惯特征值获取方式,作为一种实施方式,可以计算前车的纵向习惯特征值与1之间的偏差值,即纵向习惯特征值与1之间的差值的绝对值,再将该偏差值与第一预设系数的乘积加上当前的跟车距离,得到调整后的跟车距离,即调整后的跟车距离T′=T+R*|Ylb-1|。这样当Yl偏离1越大,则认为前车的驾驶员操作越粗糙,需要增加的跟车距离越大。当然,在本说明书其他实施例中,也可以采用其他调整方式。
第二种,变道策略的调整。具体可以根据实际应用场景中,车辆本身的预先设置的变道条件进行策略调整。可以理解的是,车辆的变道会受到前车以及位于本车相邻车道且行驶在本车后方的车辆的影响。
在一种可选的实施例中,若目标车辆包括前车即本车道有前车,且变道策略包括第一预设变道条件,第一预设变道条件为根据前车与本车之间的速度差确定是否触发本车变道的判断条件。此时,上述基于驾驶习惯信息,调整本车的变道策略可以包括:基于第二预设系数以及前车的纵向习惯特征值,调整第一预设变道条件。其中,第二预设系数为常值系数,为厂商根据路试和纵向习惯特征值的计算方式确定,可以与车型分别对应。
举例来讲,若原变道策略中将本车设定速度与本车道前车速度差Vrel作为触发变道的先决条件即第一预设变道条件。当速度差Vrel大于预设速度差阈值时,则满足第一预设变道条件。若本车道有前车,且前车的纵向习惯特征值为Ylb,可以基于第二预设系数以及前车的纵向习惯特征值为Ylb调整原本的预设速度差阈值。
可以理解的是,纵向习惯特征值的获取方式不同,则第二预设系数以及调整方式也就不同。假设调整前的预设速度差阈值表示为Vc,第二预设系数表示R1。
若采用上述第一种纵向习惯特征值获取方式,作为一种实施方式,可以将预设速度差阈值减小R1*Ylb,即调整后的预设速度差阈值Vc′=Vc-R1*Ylb。如果前车相比本车驾驶更激进,则Ylb>0,此时预设速度差阈值减小,越容易变道;如果前车相比本车驾驶更保守,Ylb<0,此时预设速度差阈值增大,越偏好跟着前车。当然,在本说明书其他实施例中,也可以采用其他调整方式。
若采用上述第二种纵向习惯特征值获取方式,作为一种实施方式,可以将预设速度差阈值减小R1*|Ylb-1|,即调整后的预设速度差阈值Vc′=Vc-R1*|Ylb-1|。这样当Ylb偏离1越大,则认为前车的驾驶员操作越粗糙,预设速度差阈值减小量越大,越容易触发变道。当然,在本说明书其他实施例中,也可以采用其他调整方式。
在一种可选的实施例中,若目标车辆包括侧后方车辆,即位于本车相邻车道且行驶在本车后方的车辆,且变道策略包括第二预设变道条件,第二预设变道条件为根据侧后方车辆与本车的纵向距离确定是否触发本车变道的判断条件。此时,上述基于驾驶习惯信息,调整本车的变道策略可以包括:基于第三预设系数以及侧后方车辆的纵向习惯特征值,调整第二预设变道条件。其中,第三预设系数为常值系数,为厂商根据路试和纵向习惯特征值的计算方式确定,可以与车型分别对应。
举例来讲,若原变道策略中将侧后方车辆距离本车纵向距离作为可触发变道动作的条件即第二预设变道条件。当侧后方车辆距离本车纵向距离达到预设纵向距离阈值例如达到TTC 4秒,则满足第二预设变道条件,才可触发变道动作。此时,若本车相邻车道侧后方有目标车辆,且该侧后方目标车辆的纵向习惯特征值为Yla,则可以基于侧后方车辆的纵向习惯特征值为Yla以及第三预设系数调整原本的预设纵向距离阈值。
可以理解的是,纵向习惯特征值的获取方式不同,则第三预设系数以及调整方式也就不同。假设调整前的预设纵向距离阈值表示为L,第三预设系数表示R2。
若采用上述第一种纵向习惯特征值获取方式,作为一种实施方式,可以将预设纵向距离阈值增加R2*Yla,即调整后的预设纵向距离阈值L′=L+R2*Yla。如果侧后方车辆相比本车驾驶更激进,则Yla>0,此时预设纵向距离阈值增大,变道要求侧后方车要更远;如果侧后方车辆相比本车驾驶更保守,Yla<0,此时预设纵向距离阈值减小,相比调整前的策略,侧后方车辆与本车距离更近也能变道。当然,在本说明书其他实施例中,也可以采用其他调整方式。
若采用上述第二种纵向习惯特征值获取方式,作为一种实施方式,可以将预设纵向距离阈值增加R2*|Yla-1|,即调整后的预设纵向距离阈值L′=L+R2*|Yla-1|。这样当Yla偏离1越大,则认为前车的驾驶员操作越粗糙,预设速度差阈值增加量越大,变道要求侧后方车要更远。当然,在本说明书其他实施例中,也可以采用其他调整方式。
另外,在一种可选的实施例中,目标车辆包括本车所在车道的前车,本说明书实施例提供的自动驾驶控制方法还包括:当本车处在伴行直行状态时,若前车的横向习惯特征值小于本车的横向习惯特征值,且前车的车道线距离习惯特征值小于预设阈值,则检测前车在指定时间长度内的横向移动距离是否大于预设距离,若是,则控制本车在本车道也跟随前车进行横向移动,例如,前车在本车道内左移0.8米,则本车也跟随前车在本车道内左移0.8米。当然,若上述过程中,任意一条件不满足,则不触发横向移动跟随控制。通过这种跟随横向移动的方式可以帮助本车躲避道路上木头,石头等雷达难以探测到的障碍物,有利于进一步提高自动驾驶控制的可靠性,乘员体验更舒适。
其中,预设阈值为可标定值,由厂商根据车道宽度确定。需要说明的是,当前车的车道线距离习惯特征值小于预设阈值时,则认为前车的车道线距离习惯特征值接近0。指定时间长度可以根据实际应用场景以及多次试验设置,例如,可以设置为2秒或3秒等。预设距离可以根据车道宽度确定,例如高速路车道宽3.75米,则预设距离可以设为0.5米。
本说明书实施例提供的技术方案,能够在伴行直行状态下,通过计算能够反应前车纵向驾驶习惯的纵向习惯特征值,当前车驾驶习惯比一般车辆激进,每次刹车减速度大,本车可通过前车的纵向习惯特征值调整本车与前车的跟车距离,使得跟随前车时加减速缓冲区更长,乘员更舒适。
在伴行直行状态下,通过计算能够反应前车横向驾驶习惯的横向习惯特征值,当前车突然出现自车道内横向移动,本车可跟随移动,以便躲避木头,石块等雷达难以探测的障碍物。
在伴行需变道情况下,通过计算相邻车道侧后方车辆的纵向习惯特征值,以及本车道前车的纵向习惯特征值,能够更灵活地决定变道条件,匹配周边车辆驾驶习惯,和伴行车辆之间的路权交互更默契。
在高速伴行情况下,通过本车摄像头和雷达收集周边车辆信息,并计算驾驶习惯特征值,不受网络条件限制。并且,根据不同的伴行车辆驾驶习惯,灵活地调整本车的跟车距离,变道预留距离等,使得本车跟车及变道行为更灵活,且不改变本车原有功能算法。能快速匹配不同风格的周边车辆,使自动驾驶更智能,乘员体验更舒适。
综上所述,本说明书实施例提供的自动驾驶控制方法,能够通过学习到的周围目标车辆的驾驶习惯,来调整本车的跟车距离和/或变道策略,使得本车跟车及变道行为更灵活,与伴行车辆之间的路权交互更默契,有利于提高自动驾驶控制的可靠性,使得乘员体验更舒适。
第二方面,基于与前述第一方面实施例提供的自动驾驶控制方法同样的发明构思,本说明书实施例还提供了一种自动驾驶控制装置。如图2所示,该自动驾驶控制装置20包括:
获取模块201,用于当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;
习惯确定模块202,用于根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息;
调整模块203,用于基于所述驾驶习惯信息,调整本车的跟车距离和/或变道策略。
在一种可选的实施例中,上述习惯确定模块202包括:纵向习惯确定子模块,用于从所述目标车辆的驾驶数据中确定纵向驾驶数据,并基于所述纵向驾驶数据,确定所述目标车辆的纵向习惯特征值,其中,所述纵向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的纵向驾驶习惯。
在一种可选的实施例中,所述目标车辆包括本车所在车道的前车,上述调整模块203包括:跟车距离调整子模块,用于基于第一预设系数以及所述前车的纵向习惯特征值,调整本车的跟车距离。
在一种可选的实施例中,所述目标车辆包括本车所在车道的前车,上述调整模块203包括:第一策略调整子模块,用于基于第二预设系数以及所述前车的纵向习惯特征值,调整第一预设变道条件,所述第一预设变道条件为根据所述前车与本车之间的速度差确定是否触发本车变道的判断条件。
在一种可选的实施例中,所述目标车辆包括侧后方车辆,所述侧后方车辆为位于本车相邻车道且行驶在本车后方的车辆。上述调整模块203包括:第二策略调整子模块,用于第三预设系数以及基于所述侧后方车辆的纵向习惯特征值,调整第二预设变道条件,所述第二预设变道条件为根据所述侧后方车辆与本车的纵向距离确定是否触发本车变道的判断条件。
在一种可选的实施例中,上述习惯确定模块202包括:横向习惯确定子模块,用于从所述目标车辆的驾驶数据中确定横向驾驶数据,并基于所述横向驾驶数据,确定所述目标车辆的横向习惯特征值,其中,所述横向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的横向驾驶习惯。
在一种可选的实施例中,上述习惯确定模块202包括:车道线距离确定子模块,用于从所述目标车辆的驾驶数据中确定车道线距离数据,并基于所述车道线距离数据,确定所述目标车辆的车道线距离习惯特征值,其中,所述车道线距离习惯特征值用于表征所述目标车辆在相应车道中行驶的位置习惯。
在一种可选的实施例中,所述目标车辆包括本车所在车道的前车,上述自动驾驶控制装置20还包括:横向跟随模块,用于当本车处在伴行直行状态时,若所述前车的横向习惯特征值小于本车的横向习惯特征值,且所述前车的车道线距离习惯特征值小于预设阈值,则检测所述前车在指定时间长度内的横向移动距离是否大于预设距离,若是,则控制本车跟随所述前车进行横向移动。
需要说明的是,本说明书实施例所提供的自动驾驶控制装置20,其中各个模块执行操作的具体方式已经在上述第一方面提供的方法实施例中进行了详细描述,具体实施过程可以参照上述第一方面提供的方法实施例,此处将不做详细阐述说明。
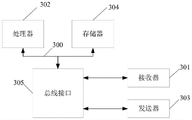
第三方面,基于与前述第一方面实施例提供的自动驾驶控制方法同样的发明构思,本说明书实施例还提供了一种车辆,如图3所示,可以包括:存储器304、一个或多个处理器302及存储在存储器304上并可在处理器302上运行的计算机程序,处理器302执行该程序时实现前文第一方面提供的自动驾驶控制方法的任一实施例的步骤。
其中,在图3中,总线架构(用总线300来代表),总线300可以包括任意数量的互联的总线和桥,总线300将包括由处理器302代表的一个或多个处理器和存储器304代表的存储器的各种电路链接在一起。总线300还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口305在总线300和接收器301和发送器303之间提供接口。接收器301和发送器303可以是同一个元件,即收发机,提供用于在传输介质上与各种其他装置通信的单元。处理器302负责管理总线300和通常的处理,而存储器304可以被用于存储处理器302在执行操作时所使用的数据。
可以理解的是,图3所示的结构仅为示意,本说明书实施例提供的车辆还可包括比图3中所示更多的组件,或者具有与图3所示不同的配置,具体可以参照现有自动驾驶车辆的组件配置。例如,本说明书实施例提供的车辆还包括感知模块、制动及转向器等,其中,感知模块可以包括但不限于摄像头、雷达、超声波传感器、红外传感器等,以便通过采集视频、毫米波、超声波以及远红外数据等方式获取伴行车辆的驾驶数据。需要说明的是,图3中所示的各组件可以采用硬件、软件或其组合实现。
第四方面,基于与前述实施例中提供的自动驾驶控制方法同样的发明构思,本说明书实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前文第一方面提供的自动驾驶控制方法的任一实施例的步骤。
本说明书是参照根据本说明书实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的设备。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令设备的制造品,该指令设备实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管已描述了本说明书的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本说明书范围的所有变更和修改。
显然,本领域的技术人员可以对本说明书进行各种改动和变型而不脱离本说明书的精神和范围。这样,倘若本说明书的这些修改和变型属于本说明书权利要求及其等同技术的范围之内,则本说明书也意图包含这些改动和变型在内。
Claims (9)
1.一种自动驾驶控制方法,其特征在于,所述方法包括:
当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;
根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息,所述驾驶习惯信息包括纵向习惯特征值、横向习惯特征值以及车道线距离习惯特征值,所述纵向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的纵向驾驶习惯,所述横向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的横向驾驶习惯,所述车道线距离习惯特征值用于表征所述目标车辆在相应车道中行驶的位置习惯,所述目标车辆包括本车所在车道的前车;
基于所述驾驶习惯信息,调整本车的跟车距离和/或变道策略,包括:基于所述前车的纵向习惯特征值,调整本车的跟车距离和/或变道策略;
当本车处在伴行直行状态时,若所述前车的横向习惯特征值小于本车的横向习惯特征值,且所述前车的车道线距离习惯特征值小于预设阈值,则检测所述前车在指定时间长度内的横向移动距离是否大于预设距离,若是,则控制本车跟随所述前车进行横向移动。
2.根据权利要求1所述的方法,其特征在于,根据所述驾驶数据,确定所述目标车辆的纵向习惯特征值,包括:
从所述目标车辆的驾驶数据中确定纵向驾驶数据,并基于所述纵向驾驶数据,确定所述目标车辆的纵向习惯特征值。
3.根据权利要求2所述的方法,其特征在于,基于所述前车的纵向习惯特征值,调整本车的跟车距离,包括:
基于第一预设系数以及所述前车的纵向习惯特征值,调整本车的跟车距离。
4.根据权利要求2所述的方法,其特征在于,基于所述前车的纵向习惯特征值,调整本车的变道策略,包括:
基于第二预设系数以及所述前车的纵向习惯特征值,调整第一预设变道条件,所述第一预设变道条件为根据所述前车与本车之间的速度差确定是否触发本车变道的判断条件。
5.根据权利要求2所述的方法,其特征在于,所述目标车辆还包括侧后方车辆,所述侧后方车辆为位于本车相邻车道且行驶在本车后方的车辆,基于所述驾驶习惯信息,调整本车的变道策略,还包括:
基于第三预设系数以及所述侧后方车辆的纵向习惯特征值,调整第二预设变道条件,所述第二预设变道条件为根据所述侧后方车辆与本车的纵向距离确定是否触发本车变道的判断条件。
6.根据权利要求1所述的方法,其特征在于,根据所述驾驶数据,确定所述目标车辆的横向习惯特征值,包括:
从所述目标车辆的驾驶数据中确定横向驾驶数据,并基于所述横向驾驶数据,确定所述目标车辆的横向习惯特征值。
7.根据权利要求6所述的方法,其特征在于,根据所述驾驶数据,确定所述目标车辆的车道线距离习惯特征值,包括:
从所述目标车辆的驾驶数据中确定车道线距离数据,并基于所述车道线距离数据,确定所述目标车辆的车道线距离习惯特征值。
8.一种自动驾驶控制装置,其特征在于,所述装置包括:
获取模块,用于当监测到本车处于伴行状态时,获取本车周围目标车辆在预设时间窗口内的驾驶数据;
习惯确定模块,用于根据所述驾驶数据,确定所述目标车辆的驾驶习惯信息,所述驾驶习惯信息包括纵向习惯特征值、横向习惯特征值以及车道线距离习惯特征值,所述纵向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的纵向驾驶习惯,所述横向习惯特征值用于表征所述目标车辆在所述预设时间窗口内的横向驾驶习惯,所述车道线距离习惯特征值用于表征所述目标车辆在相应车道中行驶的位置习惯,所述目标车辆包括本车所在车道的前车;
调整模块,用于基于所述驾驶习惯信息,调整本车的跟车距离和/或变道策略,包括:基于所述前车的纵向习惯特征值,调整本车的跟车距离和/或变道策略;
横向跟随模块,用于当本车处在伴行直行状态时,若所述前车的横向习惯特征值小于本车的横向习惯特征值,且所述前车的车道线距离习惯特征值小于预设阈值,则检测所述前车在指定时间长度内的横向移动距离是否大于预设距离,若是,则控制本车跟随所述前车进行横向移动。
9.一种车辆,其特征在于,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1-7任一项所述方法的步骤。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011256172.7A CN112477884B (zh) | 2020-11-11 | 2020-11-11 | 自动驾驶控制方法、装置及车辆 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011256172.7A CN112477884B (zh) | 2020-11-11 | 2020-11-11 | 自动驾驶控制方法、装置及车辆 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112477884A CN112477884A (zh) | 2021-03-12 |
| CN112477884B true CN112477884B (zh) | 2022-03-08 |
Family
ID=74929656
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011256172.7A Active CN112477884B (zh) | 2020-11-11 | 2020-11-11 | 自动驾驶控制方法、装置及车辆 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112477884B (zh) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114084132A (zh) * | 2020-07-31 | 2022-02-25 | 华为技术有限公司 | 控制方法与装置、终端设备 |
| CN112429016B (zh) * | 2020-08-31 | 2022-04-29 | 腾讯科技(深圳)有限公司 | 一种自动驾驶控制方法及装置 |
| CN113002564A (zh) * | 2021-03-31 | 2021-06-22 | 中国第一汽车股份有限公司 | 基于自动驾驶的车距控制方法、车辆及存储介质 |
| CN113119999B (zh) * | 2021-04-16 | 2024-03-12 | 阿波罗智联(北京)科技有限公司 | 自动驾驶特征的确定方法、装置、设备、介质及程序产品 |
| CN113353077A (zh) * | 2021-06-11 | 2021-09-07 | 中汽创智科技有限公司 | 车辆行驶控制方法、装置及设备 |
| CN113581207B (zh) * | 2021-08-03 | 2022-10-25 | 武汉光庭信息技术股份有限公司 | 基于自动驾驶或辅助驾驶的车辆自动变道优化控制方法 |
| CN113581208B (zh) * | 2021-08-04 | 2023-06-20 | 东风柳州汽车有限公司 | 驾驶辅助模式切换方法、装置、设备及存储介质 |
| CN114248806A (zh) * | 2022-01-13 | 2022-03-29 | 云控智行科技有限公司 | 一种无人车驾驶控制方法、装置及电子设备 |
| CN114506322B (zh) * | 2022-02-16 | 2023-06-30 | 岚图汽车科技有限公司 | 跟车控制方法、装置、设备及可读存储介质 |
| CN114435367A (zh) * | 2022-03-14 | 2022-05-06 | 东风汽车集团股份有限公司 | 基于车道指示牌与车道线的路口辅助横向控制方法及车辆 |
| CN114954756B (zh) * | 2022-05-18 | 2023-12-19 | 重庆利龙中宝智能技术有限公司 | 一种基于ar-hmd的智能头盔盲区检测系统和方法 |
| CN116639152B (zh) * | 2023-07-27 | 2023-10-31 | 安徽中科星驰自动驾驶技术有限公司 | 一种自动驾驶车辆的人工引导识别方法及系统 |
| CN116653963B (zh) * | 2023-07-31 | 2023-10-20 | 福思(杭州)智能科技有限公司 | 车辆变道控制方法、系统和智能驾驶域控制器 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9147353B1 (en) * | 2013-05-29 | 2015-09-29 | Allstate Insurance Company | Driving analysis using vehicle-to-vehicle communication |
| CN105438183A (zh) * | 2015-12-21 | 2016-03-30 | 江苏大学 | 一种驾驶员激进驾驶状态的识别装置及方法 |
| CN108595823A (zh) * | 2018-04-20 | 2018-09-28 | 大连理工大学 | 一种联合驾驶风格和博弈理论的自主车换道策略的计算方法 |
| CN110015306A (zh) * | 2018-01-10 | 2019-07-16 | 华为技术有限公司 | 驾驶轨迹获取方法及装置 |
| CN110297494A (zh) * | 2019-07-15 | 2019-10-01 | 吉林大学 | 一种基于滚动博弈的自动驾驶车辆换道决策方法及系统 |
| CN111891128A (zh) * | 2020-08-13 | 2020-11-06 | 广州小马智行科技有限公司 | 车辆的控制方法及车辆、运载工具 |
| CN112277944A (zh) * | 2020-10-30 | 2021-01-29 | 浙江吉利控股集团有限公司 | 一种道路巡航方法、装置及介质 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180170392A1 (en) * | 2016-12-20 | 2018-06-21 | Baidu Usa Llc | Method and System to Recognize Individual Driving Preference for Autonomous Vehicles |
-
2020
- 2020-11-11 CN CN202011256172.7A patent/CN112477884B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9147353B1 (en) * | 2013-05-29 | 2015-09-29 | Allstate Insurance Company | Driving analysis using vehicle-to-vehicle communication |
| CN105438183A (zh) * | 2015-12-21 | 2016-03-30 | 江苏大学 | 一种驾驶员激进驾驶状态的识别装置及方法 |
| CN110015306A (zh) * | 2018-01-10 | 2019-07-16 | 华为技术有限公司 | 驾驶轨迹获取方法及装置 |
| CN108595823A (zh) * | 2018-04-20 | 2018-09-28 | 大连理工大学 | 一种联合驾驶风格和博弈理论的自主车换道策略的计算方法 |
| CN110297494A (zh) * | 2019-07-15 | 2019-10-01 | 吉林大学 | 一种基于滚动博弈的自动驾驶车辆换道决策方法及系统 |
| CN111891128A (zh) * | 2020-08-13 | 2020-11-06 | 广州小马智行科技有限公司 | 车辆的控制方法及车辆、运载工具 |
| CN112277944A (zh) * | 2020-10-30 | 2021-01-29 | 浙江吉利控股集团有限公司 | 一种道路巡航方法、装置及介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112477884A (zh) | 2021-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112477884B (zh) | 自动驾驶控制方法、装置及车辆 | |
| JP6651642B2 (ja) | 車両制御装置 | |
| US11220261B2 (en) | Method for assisting a driver, driver assistance system, and vehicle including such driver assistance system | |
| US10864910B2 (en) | Automated driving systems and control logic using sensor fusion for intelligent vehicle control | |
| CN109649393B (zh) | 一种自动驾驶变换车道的路径规划方法及装置 | |
| CN109649390B (zh) | 一种自动驾驶汽车自主跟车系统及方法 | |
| CN110103969B (zh) | 一种车辆控制方法、装置、系统及车辆 | |
| US11226620B2 (en) | Automated driving systems and control logic with enhanced longitudinal control for transitional surface friction conditions | |
| CN113291308B (zh) | 一种考虑驾驶行为特性的车辆自学习换道决策系统及方法 | |
| CN111497834B (zh) | 驾驶辅助系统 | |
| US20200238980A1 (en) | Vehicle control device | |
| CN111267842B (zh) | 辅助驾驶车辆中自动车道变换的纵向控制的设备和方法 | |
| JP7172287B2 (ja) | 自動運転システム | |
| EP3663152A1 (en) | Vehicle control device | |
| US20160091325A1 (en) | Method and system of assisting a driver of a vehicle | |
| US10457327B2 (en) | Method and system of assisting a driver of a vehicle | |
| US11192547B2 (en) | Adaptive speed control system | |
| JP2019211830A (ja) | 車線変更推定装置および車線変更推定方法と、車両制御装置および車両制御方法 | |
| US11110924B2 (en) | Method and apparatus for dynamic adjustment of vehicle motion profiles | |
| US20200391747A1 (en) | Vehicle control device | |
| EP3666612A1 (en) | Vehicle control device | |
| JP4946212B2 (ja) | 走行支援装置 | |
| JP2017117192A (ja) | 運転支援装置 | |
| CN112937584B (zh) | 一种自动换道控制方法、装置及汽车 | |
| US20160090086A1 (en) | Method and system of assisting a driver of a vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |