CN112441155B - 一种爬壁检测装置及其检测方法 - Google Patents
一种爬壁检测装置及其检测方法 Download PDFInfo
- Publication number
- CN112441155B CN112441155B CN202011381383.3A CN202011381383A CN112441155B CN 112441155 B CN112441155 B CN 112441155B CN 202011381383 A CN202011381383 A CN 202011381383A CN 112441155 B CN112441155 B CN 112441155B
- Authority
- CN
- China
- Prior art keywords
- roller
- camera
- motor
- module
- detection device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 114
- 230000009194 climbing Effects 0.000 title claims abstract description 50
- 238000001179 sorption measurement Methods 0.000 claims abstract description 30
- 238000004804 winding Methods 0.000 claims description 45
- 229920001971 elastomer Polymers 0.000 claims description 34
- 230000007246 mechanism Effects 0.000 claims description 28
- 238000007789 sealing Methods 0.000 claims description 28
- 229910052751 metal Inorganic materials 0.000 claims description 16
- 239000002184 metal Substances 0.000 claims description 16
- 239000000428 dust Substances 0.000 claims description 14
- 230000000007 visual effect Effects 0.000 claims description 8
- 238000000034 method Methods 0.000 claims description 7
- 238000005096 rolling process Methods 0.000 claims description 6
- 230000008569 process Effects 0.000 claims description 4
- 230000009193 crawling Effects 0.000 claims description 3
- 238000013461 design Methods 0.000 abstract description 4
- 230000000694 effects Effects 0.000 abstract description 4
- 238000007689 inspection Methods 0.000 description 6
- 230000007547 defect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 229910000838 Al alloy Inorganic materials 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000005389 magnetism Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 2
- 229920002635 polyurethane Polymers 0.000 description 2
- 239000004814 polyurethane Substances 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003345 natural gas Substances 0.000 description 1
- 239000011664 nicotinic acid Substances 0.000 description 1
- 230000002285 radioactive effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/024—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members specially adapted for moving on inclined or vertical surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/42—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters with arrangement for propelling the support stands on wheels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Studio Devices (AREA)
Abstract
本发明公开了一种爬壁检测装置及其检测方法,装置包括支撑板,支撑板的上部设置有控制器模块、微型摄像头伸缩模块和多个云台摄像头,支撑板的下部设置有多个驱动电机和多个电永磁铁吸附模块,微型摄像头伸缩模块上连接有微型摄像头,驱动电机的输出轴上连接有全向轮,微型摄像头伸缩模块和云台摄像头均与控制器模块相接,驱动电机与控制器模块的输出端连接,控制器模块的输入端接有多个超声波避障模块。本发明装置结构简单,设计合理,实现方便,能够有效应用在自动化检测作业中,结合检测方法,实现检测空间范围广,移动灵活快捷,工作安全可靠,使用效果好,便于推广使用。
Description
技术领域
本发明属于自动化检测技术领域,具体涉及一种爬壁检测装置及其检测方法。
背景技术
对于下水管道及天然气输送管道检测、核工业和石化工业的大型罐体内壁检测、火力发电站锅炉水冷壁排管检测、核电站蒸汽发生器检测等可视化的作业检修,目前大部分还是采用传统人工方法进行作业。人工作业工人的劳动强度大,工作环境恶劣,甚至有放射性危害,同时工作效率低,工作周期长。随着科学技术的发展及人工作业成本的提高,出现了各种各样的爬壁检修机器人,有真空吸附爬壁机器人、磁吸附爬壁机器人和仿生脚掌爬壁机器人等,这些机器人可以在垂直的金属平面及曲面上自由行走、停留及作业,能够代替人工进行检修作业,大大提高了工作效率。
然而,目前的爬壁检修机器人携带的微型检测摄像头大多采用固定云台方式,即摄像头只能在固定位置进行水平和垂直方向检测,在一些机器人不能到达的狭小空间,较远的微小角落,微型检测摄像头无法检测或检测图像模糊,导致爬壁检修机器人存在检测有死角、检测空间不彻底缺陷。
而且,目前的爬壁检修机器人携带的微型检测摄像头检测范围有限,无法进行360度全景检测,导致爬壁检修机器人在移动过程中不够灵活,操作稍有不慎就会撞到检测空间里的元器件,造成无法估量的损失,尤其在核装置等精密复杂曲面空间内检测更是如此。
此外,真空吸附爬壁机器人、磁吸附爬壁机器人等在作业过程中,如遇突然断电等突发状况,会导致吸附力突然消失,造成爬壁机器人突然掉落,不仅会造成机器人自身机体的损坏,还会造成作业对象机器装置的损坏,产生不必要的意想不到损失后果。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种爬壁检测装置,其装置结构简单,设计合理,实现方便,能够有效应用在自动化检测作业中,结合检测方法,实现检测空间范围广,移动灵活快捷,工作安全可靠,使用效果好,便于推广使用。
为解决上述技术问题,本发明采用的技术方案是:一种爬壁检测装置,包括支撑板,所述支撑板的上部设置有控制器模块、微型摄像头伸缩模块和多个云台摄像头,所述支撑板的下部设置有多个驱动电机和多个电永磁铁吸附模块,所述微型摄像头伸缩模块上连接有微型摄像头,所述驱动电机的输出轴上连接有全向轮,所述微型摄像头伸缩模块和云台摄像头均与控制器模块相接,所述驱动电机与控制器模块的输出端连接,所述控制器模块的输入端接有多个超声波避障模块。
上述的一种爬壁检测装置,所述支撑板的上部设置有透明的防尘罩,所述防尘罩上设置有航空插头和供微型摄像头伸出的开孔。
上述的一种爬壁检测装置,所述防尘罩的上部连接有密封盖板,所述密封盖板通过多根立柱与支撑板连接。
上述的一种爬壁检测装置,所述支撑板的下部设置有密封罩,所述全向轮伸出密封罩外,所述超声波避障模块设置在密封罩上。
上述的一种爬壁检测装置,所述密封罩上设置有多个LED灯带,所述LED灯带与控制器模块的输出端连接。
上述的一种爬壁检测装置,所述云台摄像头的数量为三个,三个云台摄像头均匀分布在支撑板的上部;所述超声波避障模块的数量为三个,三个超声波避障模块间隔120度均匀分布在密封罩上;所述驱动电机和全向轮的数量均为三个,三个全向轮均匀分布在密封罩的周围;所述电永磁铁吸附模块的数量为三个,三个电永磁铁吸附模块间隔120度均匀分布在支撑板的下部。
上述的一种爬壁检测装置,所述微型摄像头伸缩模块包括壳体上腔和壳体下腔,所述壳体上腔和壳体下腔之间设置有安装板,所述壳体上腔内设置有卷线机构和伸缩机构,所述壳体下腔内设置有固定连接在安装板下部的卷线电机,所述卷线机构包括固定连接在安装板上部的卷线盘底座,所述卷线盘底座内设置有用于收卷摄像头电缆的卷线组件,所述卷线盘底座的上部设置有卷线盘上盖,所述卷线盘底座的侧面设置有电缆导管;所述伸缩机构包括固定连接在安装板上部的伸缩机构底座,所述伸缩机构底座的侧面设置有伸出壳体上腔外的摄像头管道,所述电缆导管伸入伸缩机构底座内且与摄像头管道连通,所述伸缩机构底座内设置有用于带动微型摄像头伸缩的滚动组件,所述伸缩机构底座的上部设置有伸缩机构上盖。
上述的一种爬壁检测装置,所述卷线组件包括连接在卷线盘底座与卷线盘上盖之间的空心转轴,所述空心转轴上固定连接有转轴盘和位于转轴盘上方的转轴叶片,所述空心转轴与卷线电机的输出轴连接。
上述的一种爬壁检测装置,所述滚动组件包括滚轮电机、设置在电缆导管一侧的第一滚轮轴和第二滚轮轴,以及设置在电缆导管另一侧的第一螺栓滚轮轴承和第二螺栓滚轮轴承;所述滚轮电机通过滚轮电机支架安装在伸缩机构底座内,所述滚轮电机的输出轴上连接有位于滚轮电机支架上部的滚轮电机带轮,所述第一滚轮轴上设置有第一橡胶滚轮、第一滚轮上带轮和第一滚轮下带轮,所述第一滚轮上带轮和第一滚轮下带轮分布在第一橡胶滚轮的上下两侧,所述第二滚轮轴上设置有第二橡胶滚轮和位于第二橡胶滚轮下方的第二滚轮下带轮,所述滚轮电机带轮通过电机皮带与第一滚轮上带轮连接,所述第一滚轮下带轮通过滚轮皮带与第二滚轮下带轮连接。
本发明还公开了一种爬壁检测方法,包括以下步骤:
步骤一、作业人员将检测装置放置到待检测的金属表面,使电永磁铁吸附模块靠近金属表面,用手拖住检测装置,按下检测开始按钮;
步骤二、电永磁铁吸附模块产生磁吸力,将检测装置吸附在待检测的金属表面;
步骤三、通过控制器模块控制驱动电机工作,带动全向轮转动,检测装置在待检测的金属表面爬行,爬行过程中遇到障碍物时,超声波避障模块发出信号到控制器模块中,作业人员通过云台摄像头查看障碍物的形状大小和具体位置,并调整检测装置绕过障碍物;
步骤四、通过控制器模块控制云台摄像头工作,对检测空间进行全方位可视化检测;
步骤五、当遇到云台摄像头无法看清的狭小空间时,通过控制器模块控制微型摄像头伸缩模块工作,将微型摄像头伸入狭小空间内进行可视化检测;
步骤六、整个检测作业完成后,作业人员用手拖住检测装置,按下检测结束按钮,电永磁铁吸附模块磁力消失,将检测装置从金属表面取下。
本发明与现有技术相比具有以下优点:
1、本发明装置结构简单,设计合理,实现方便。
2、本发明设计三个云台摄像头,均匀分布在支撑板的上部,能够进行360度全景检测,检测视角广,配合三个全向轮,使爬壁检测装置在复杂检测空间内移动灵活快捷,克服移动不够灵活,容易撞到检测空间里的元器件,造成无法估量损失的缺陷。
3、本发明通过设计微型摄像头伸缩模块并携带微型摄像头,能够检测装置本体不能到达的狭小空间及较远的微小角落,检测范围大,检测灵活性高,克服目前爬壁检修机器人存在检测有死角、检测空间不彻底的缺陷。
4、本发明通过均匀分布的三个电永磁铁吸附模块,保证了爬壁检修装置的吸附可靠,即使系统突然断电,磁力也不会消失,克服了目前爬壁机器人采用真空吸附、电磁吸附方式在系统突然断电时,吸附力突然消失,爬壁机器人意外掉落,造成无法预测损害的缺陷。
5、本发明能够有效应用在自动化检测作业中,结合检测方法,实现检测空间范围广,移动灵活快捷,工作安全可靠,本发明使用效果好,便于推广使用。
综上所述,本发明装置结构简单,设计合理,实现方便,能够有效应用在自动化检测作业中,结合检测方法,实现检测空间范围广,移动灵活快捷,工作安全可靠,本发明使用效果好,便于推广使用。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
图1为本发明爬壁检测装置的结构示意图;
图2为图1的俯视图;
图3为图1的仰视图;
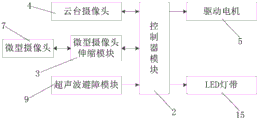
图4为本发明爬壁检测装置的电气连接框图;
图5为本发明爬壁检测装置带防尘罩和密封罩的结构示意图;
图6为本发明微型摄像头伸缩模块的结构示意图;
图7为本发明卷线组件的结构示意图;
图8为本发明滚动组件的结构示意图。
附图标记说明:
1—支撑板; 2—控制器模块; 3—微型摄像头伸缩模块;
3-2—安装板; 3-3—卷线电机; 3-4—卷线盘底座;
3-5—摄像头电缆; 3-6—卷线盘上盖; 3-7—电缆导管;
3-8—伸缩机构底座; 3-9—摄像头管道; 3-11—伸缩机构上盖;
3-12—空心转轴; 3-13—转轴盘; 3-14—转轴叶片;
3-17—滚轮电机; 3-18—第一滚轮轴; 3-19—第二滚轮轴;
3-20—第一螺栓滚轮轴承; 3-21—第二螺栓滚轮轴承;
3-22—滚轮电机支架; 3-23—滚轮电机带轮; 3-24—第一橡胶滚轮;
3-25—第一滚轮上带轮; 3-26—第一滚轮下带轮; 3-27—第二橡胶滚轮;
3-29—第二滚轮下带轮; 3-30—电机皮带; 3-31—滚轮皮带;
4—云台摄像头; 5—驱动电机; 6—电永磁铁吸附模块;
7—微型摄像头; 8—全向轮; 9—超声波避障模块;
10—防尘罩; 11—航空插头; 12—密封盖板;
14—密封罩; 15—LED灯带。
具体实施方式
如图1~图3所示,本发明的爬壁检测装置,包括支撑板1,所述支撑板1的上部设置有控制器模块2、微型摄像头伸缩模块3和多个云台摄像头4,所述支撑板1的下部设置有多个驱动电机5和多个电永磁铁吸附模块6,所述微型摄像头伸缩模块3上连接有微型摄像头7,所述驱动电机5的输出轴上连接有全向轮8,如图4所示,所述微型摄像头伸缩模块3和云台摄像头4均与控制器模块2相接,所述驱动电机5与控制器模块2的输出端连接,所述控制器模块2的输入端接有多个超声波避障模块9。
具体实施时,支撑板1采用铝合金板材,控制器模块2和微型摄像头伸缩模块3均通过螺钉固定在支撑板1上,在爬壁检测装置无法到达的狭小空间,通过微型摄像头伸缩模块3控制微型摄像头7自动伸出到狭小空间进行检测。
本实施例中,如图5所示,所述支撑板1的上部设置有透明的防尘罩10,所述防尘罩10上设置有航空插头11和供微型摄像头7伸出的开孔。
具体实施时,防尘罩10采用聚氨酯材料,防尘罩10通过螺钉固定连接在支撑板1的上部。
具体实施时,爬壁检测装置能够通过控制器模块2与外部控制箱进行无线数据传输,也能够通过航空插头11进行数据传输,传输云台摄像头4和微型摄像头7采集的实时画面。
本实施例中,如图5所示,所述防尘罩10的上部连接有密封盖板12,所述密封盖板12通过多根立柱与支撑板1连接。
具体实施时,密封盖板12采用铝合金板材,通过螺钉将密封盖板12与防尘罩10以及立柱的一端固定连接,立柱的另一端通过螺钉和支撑板1固定连接。
本实施例中,如图5所示,所述支撑板1的下部设置有密封罩14,所述全向轮8伸出密封罩14外,所述超声波避障模块9设置在密封罩14上。
具体实施时,密封罩14采用聚氨酯材料,密封罩14通过螺钉固定连接在支撑板1的下部。
本实施例中,如图5所示,所述密封罩14上设置有多个LED灯带15,所述LED灯带15与控制器模块2的输出端连接。
具体实施时,LED灯带15对称设置在超声波避障模块9的两侧,LED灯带15能够点亮三种颜色,用于显示爬壁检测装置的工作状态。
本实施例中,所述云台摄像头4的数量为三个,三个云台摄像头4均匀分布在支撑板1的上部;所述超声波避障模块9的数量为三个,三个超声波避障模块9间隔120度均匀分布在密封罩14上;所述驱动电机5和全向轮8的数量均为三个,三个全向轮8均匀分布在密封罩14的周围;所述电永磁铁吸附模块6的数量为三个,三个电永磁铁吸附模块6间隔120度均匀分布在支撑板1的下部。
具体实施时,三个云台摄像头4通过螺钉间隔120度安装在支撑板1的上部边缘处,云台摄像头可控转动范围为水平转角范围左右170度,垂直俯仰范围向上90度,向下45度,携带高功率LED红外灯,黑暗环境画面清晰可见。三个云台摄像头4均匀分布,相互配合,可以实现爬壁检修装置360度全景检测。三个超声波避障模块9间隔120度均匀分布在密封罩14上,用于360度范围无死角检测障碍物。三个驱动电机5各自通过电机支架固定连接在支撑板1的下部,每个驱动电机5的输出轴通过联轴器安装有全向轮8,三个全向轮8相互配合带动爬壁检测装置移动,实现爬壁检测装置前后、左右以及原地360旋转等运动,移动灵活快捷。电永磁铁吸附模块6通电后会变成永磁铁,不需要持续供电,也能保持磁力,避免了传统的电磁铁断电后磁性消失的问题。
本实施例中,如图6所示,所述微型摄像头伸缩模块3包括壳体上腔和壳体下腔,所述壳体上腔和壳体下腔之间设置有安装板3-2,所述壳体上腔内设置有卷线机构和伸缩机构,所述壳体下腔内设置有固定连接在安装板3-2下部的卷线电机3-3,所述卷线机构包括固定连接在安装板3-2上部的卷线盘底座3-4,所述卷线盘底座3-4内设置有用于收卷摄像头电缆3-5的卷线组件,所述卷线盘底座3-4的上部设置有卷线盘上盖3-6,所述卷线盘底座3-4的侧面设置有电缆导管3-7;所述伸缩机构包括固定连接在安装板3-2上部的伸缩机构底座3-8,所述伸缩机构底座3-8的侧面设置有伸出壳体上腔外的摄像头管道3-9,所述电缆导管3-7伸入伸缩机构底座3-8内且与摄像头管道3-9连通,所述伸缩机构底座3-8内设置有用于带动微型摄像头7伸缩的滚动组件,所述伸缩机构底座3-8的上部设置有伸缩机构上盖3-11。
本实施例中,如图7所示,所述卷线组件包括连接在卷线盘底座3-4与卷线盘上盖3-6之间的空心转轴3-12,所述空心转轴3-12上固定连接有转轴盘3-13和位于转轴盘3-13上方的转轴叶片3-14,所述空心转轴3-12与卷线电机3-3的输出轴连接。
本实施例中,如图8所示,所述滚动组件包括滚轮电机3-17、设置在电缆导管3-7一侧的第一滚轮轴3-18和第二滚轮轴3-19,以及设置在电缆导管3-7另一侧的第一螺栓滚轮轴承3-20和第二螺栓滚轮轴承3-21;所述滚轮电机3-17通过滚轮电机支架3-22安装在伸缩机构底座3-8内,所述滚轮电机3-17的输出轴上连接有位于滚轮电机支架3-22上部的滚轮电机带轮3-23,所述第一滚轮轴3-18上设置有第一橡胶滚轮3-24、第一滚轮上带轮3-25和第一滚轮下带轮3-26,所述第一滚轮上带轮3-25和第一滚轮下带轮3-26分布在第一橡胶滚轮3-24的上下两侧,所述第二滚轮轴3-19上设置有第二橡胶滚轮3-27和位于第二橡胶滚轮3-27下方的第二滚轮下带轮3-29,所述滚轮电机带轮3-23通过电机皮带3-30与第一滚轮上带轮3-25连接,所述第一滚轮下带轮3-26通过滚轮皮带3-31与第二滚轮下带轮3-29连接。
本发明的爬壁检测方法,包括以下步骤:
步骤一、作业人员将检测装置放置到待检测的金属表面,使电永磁铁吸附模块6靠近金属表面,用手拖住检测装置,按下检测开始按钮;
步骤二、电永磁铁吸附模块6产生磁吸力,将检测装置吸附在待检测的金属表面;
步骤三、通过控制器模块2控制驱动电机5工作,带动全向轮8转动,检测装置在待检测的金属表面爬行,爬行过程中遇到障碍物时,超声波避障模块9发出信号到控制器模块2中,作业人员通过云台摄像头4查看障碍物的形状大小和具体位置,并调整检测装置绕过障碍物;
步骤四、通过控制器模块2控制云台摄像头4工作,对检测空间进行全方位可视化检测;
步骤五、当遇到云台摄像头4无法看清的狭小空间时,通过控制器模块2控制微型摄像头伸缩模块3工作,将微型摄像头7伸入狭小空间内进行可视化检测;
具体实施时,将摄像头管道3-9对准需要检测的空间,卷线电机3-3和滚轮电机3-17开始正向转动,滚轮电机3-17带动滚轮电机带轮3-23转动,滚轮电机带轮3-23通过电机皮带3-30带动第一滚轮上带轮3-25转动,带动第一滚轮轴3-18上的第一橡胶滚轮3-24和第一滚轮下带轮3-26开始转动,第一滚轮下带轮3-26通过滚轮皮带3-31带动第二滚轮下带轮3-29转动,带动第二滚轮轴3-19上的第二橡胶滚轮3-27开始转动,第一橡胶滚轮3-24和第二橡胶滚轮3-27作为驱动轮,与第一橡胶滚轮3-24位置对应的第一螺栓滚轮轴承3-20的滚轮和与第二橡胶滚轮3-27位置对应的第二螺栓滚轮轴承3-21的滚轮作为从动轮,摄像头电缆3-5从驱动轮和从动轮中间穿过并受到一定程度的挤压,在摩擦力的驱动下,摄像头电缆3-5被拉伸移动,带动微型摄像头7从摄像头管道3-9中伸出;同时,卷线电机3-3驱动空心转轴3-12转动,带动转轴盘3-13和转轴叶片3-14转动,使收卷的摄像头电缆3-5松开,使微型摄像头能够连续伸出。
对狭小空间检测作业完成后,卷线电机3-3和滚轮电机3-17开始反向转动,卷线电机3-3驱动空心转轴3-12反向转动,带动转轴盘3-13和转轴叶片3-14反向转动,使伸出的摄像头电缆3-5一圈一圈的收卷;同时,滚轮电机3-17带动滚轮电机带轮3-23反向转动,滚轮电机带轮3-23通过电机皮带3-30带动第一滚轮上带轮3-25反向转动,带动第一滚轮轴3-18上的第一橡胶滚轮3-24和第一滚轮下带轮3-26开始反向转动,第一滚轮下带轮3-26通过滚轮皮带3-31带动第二滚轮下带轮3-29反向转动,带动第二滚轮轴3-19上的第二橡胶滚轮3-27开始反向转动,第一橡胶滚轮3-24和第二橡胶滚轮3-27作为驱动轮,第一螺栓滚轮轴承3-20的滚轮和第二螺栓滚轮轴承3-21的滚轮作为从动轮,摄像头电缆3-5从驱动轮和从动轮中间穿过并受到一定程度的挤压,在摩擦力的驱动下,摄像头电缆3-5被反向拉伸移动,带动微型摄像头7从摄像头管道3-9中缩回。
步骤六、整个检测作业完成后,作业人员用手拖住检测装置,按下检测结束按钮,电永磁铁吸附模块6磁力消失,将检测装置从金属表面取下。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。
Claims (7)
1.一种爬壁检测装置,其特征在于:包括支撑板(1),所述支撑板(1)的上部设置有控制器模块(2)、微型摄像头伸缩模块(3)和多个云台摄像头(4),所述支撑板(1)的下部设置有多个驱动电机(5)和多个电永磁铁吸附模块(6),所述微型摄像头伸缩模块(3)上连接有微型摄像头(7),所述驱动电机(5)的输出轴上连接有全向轮(8),所述微型摄像头伸缩模块(3)和云台摄像头(4)均与控制器模块(2)相接,所述驱动电机(5)与控制器模块(2)的输出端连接,所述控制器模块(2)的输入端接有多个超声波避障模块(9);
所述微型摄像头伸缩模块(3)包括壳体上腔和壳体下腔,所述壳体上腔和壳体下腔之间设置有安装板(3-2),所述壳体上腔内设置有卷线机构和伸缩机构,所述壳体下腔内设置有固定连接在安装板(3-2)下部的卷线电机(3-3),所述卷线机构包括固定连接在安装板(3-2)上部的卷线盘底座(3-4),所述卷线盘底座(3-4)内设置有用于收卷摄像头电缆(3-5)的卷线组件,所述卷线盘底座(3-4)的上部设置有卷线盘上盖(3-6),所述卷线盘底座(3-4)的侧面设置有电缆导管(3-7);所述伸缩机构包括固定连接在安装板(3-2)上部的伸缩机构底座(3-8),所述伸缩机构底座(3-8)的侧面设置有伸出壳体上腔外的摄像头管道(3-9),所述电缆导管(3-7)伸入伸缩机构底座(3-8)内且与摄像头管道(3-9)连通,所述伸缩机构底座(3-8)内设置有用于带动微型摄像头(7)伸缩的滚动组件,所述伸缩机构底座(3-8)的上部设置有伸缩机构上盖(3-11);
所述卷线组件包括连接在卷线盘底座(3-4)与卷线盘上盖(3-6)之间的空心转轴(3-12),所述空心转轴(3-12)上固定连接有转轴盘(3-13)和位于转轴盘(3-13)上方的转轴叶片(3-14),所述空心转轴(3-12)与卷线电机(3-3)的输出轴连接;
所述滚动组件包括滚轮电机(3-17)、设置在电缆导管(3-7)一侧的第一滚轮轴(3-18)和第二滚轮轴(3-19),以及设置在电缆导管(3-7)另一侧的第一螺栓滚轮轴承(3-20)和第二螺栓滚轮轴承(3-21);所述滚轮电机(3-17)通过滚轮电机支架(3-22)安装在伸缩机构底座(3-8)内,所述滚轮电机(3-17)的输出轴上连接有位于滚轮电机支架(3-22)上部的滚轮电机带轮(3-23),所述第一滚轮轴(3-18)上设置有第一橡胶滚轮(3-24)、第一滚轮上带轮(3-25)和第一滚轮下带轮(3-26),所述第一滚轮上带轮(3-25)和第一滚轮下带轮(3-26)分布在第一橡胶滚轮(3-24)的上下两侧,所述第二滚轮轴(3-19)上设置有第二橡胶滚轮(3-27)和位于第二橡胶滚轮(3-27)下方的第二滚轮下带轮(3-29),所述滚轮电机带轮(3-23)通过电机皮带(3-30)与第一滚轮上带轮(3-25)连接,所述第一滚轮下带轮(3-26)通过滚轮皮带(3-31)与第二滚轮下带轮(3-29)连接;
将微型摄像头伸出时,卷线电机(3-3)和滚轮电机(3-17)开始正向转动,滚轮电机(3-17)带动滚轮电机带轮(3-23)转动,滚轮电机带轮(3-23)通过电机皮带(3-30)带动第一滚轮上带轮(3-25)转动,带动第一滚轮轴(3-18)上的第一橡胶滚轮(3-24)和第一滚轮下带轮(3-26)开始转动,第一滚轮下带轮(3-26)通过滚轮皮带(3-31)带动第二滚轮下带轮(3-29)转动,带动第二滚轮轴(3-19)上的第二橡胶滚轮(3-27)开始转动,第一橡胶滚轮(3-24)和第二橡胶滚轮(3-27)作为驱动轮,与第一橡胶滚轮(3-24)位置对应的第一螺栓滚轮轴承(3-20)的滚轮和与第二橡胶滚轮(3-27)位置对应的第二螺栓滚轮轴承(3-21)的滚轮作为从动轮,摄像头电缆(3-5)从驱动轮和从动轮中间穿过并受到挤压,在摩擦力的驱动下,摄像头电缆(3-5)被拉伸移动,带动微型摄像头(7)从摄像头管道(3-9)中伸出;同时,卷线电机(3-3)驱动空心转轴(3-12)转动,带动转轴盘(3-13)和转轴叶片(3-14)转动,使收卷的摄像头电缆(3-5)松开,使微型摄像头能够连续伸出;
将微型摄像头收回时,卷线电机(3-3)和滚轮电机(3-17)开始反向转动,卷线电机(3-3)驱动空心转轴(3-12)反向转动,带动转轴盘(3-13)和转轴叶片(3-14)反向转动,使伸出的摄像头电缆(3-5)收卷;同时,滚轮电机(3-17)带动滚轮电机带轮(3-23)反向转动,滚轮电机带轮(3-23)通过电机皮带(3-30)带动第一滚轮上带轮(3-25)反向转动,带动第一滚轮轴(3-18)上的第一橡胶滚轮(3-24)和第一滚轮下带轮(3-26)开始反向转动,第一滚轮下带轮(3-26)通过滚轮皮带(3-31)带动第二滚轮下带轮(3-29)反向转动,带动第二滚轮轴(3-19)上的第二橡胶滚轮(3-27)开始反向转动,第一橡胶滚轮(3-24)和第二橡胶滚轮(3-27)作为驱动轮,第一螺栓滚轮轴承(3-20)的滚轮和第二螺栓滚轮轴承(3-21)的滚轮作为从动轮,摄像头电缆(3-5)从驱动轮和从动轮中间穿过并受到挤压,在摩擦力的驱动下,摄像头电缆(3-5)被反向拉伸移动,带动微型摄像头7从摄像头管道(3-9)中缩回。
2.按照权利要求1所述的一种爬壁检测装置,其特征在于:所述支撑板(1)的上部设置有透明的防尘罩(10),所述防尘罩(10)上设置有航空插头(11)和供微型摄像头(7)伸出的开孔。
3.按照权利要求2所述的一种爬壁检测装置,其特征在于:所述防尘罩(10)的上部连接有密封盖板(12),所述密封盖板(12)通过多根立柱与支撑板(1)连接。
4.按照权利要求1所述的一种爬壁检测装置,其特征在于:所述支撑板(1)的下部设置有密封罩(14),所述全向轮(8)伸出密封罩(14)外,所述超声波避障模块(9)设置在密封罩(14)上。
5.按照权利要求4所述的一种爬壁检测装置,其特征在于:所述密封罩(14)上设置有多个LED灯带(15),所述LED灯带(15)与控制器模块(2)的输出端连接。
6.按照权利要求1所述的一种爬壁检测装置,其特征在于:所述云台摄像头(4)的数量为三个,三个云台摄像头(4)均匀分布在支撑板(1)的上部;所述超声波避障模块(9)的数量为三个,三个超声波避障模块(9)间隔120度均匀分布在密封罩(14)上;所述驱动电机(5)和全向轮(8)的数量均为三个,三个全向轮(8)均匀分布在密封罩(14)的周围;所述电永磁铁吸附模块(6)的数量为三个,三个电永磁铁吸附模块(6)间隔120度均匀分布在支撑板(1)的下部。
7.一种采用如权利要求1所述装置进行爬壁检测的检测方法,其特征在于,包括以下步骤:
步骤一、作业人员将检测装置放置到待检测的金属表面,使电永磁铁吸附模块(6)靠近金属表面,用手拖住检测装置,按下检测开始按钮;
步骤二、电永磁铁吸附模块(6)产生磁吸力,将检测装置吸附在待检测的金属表面;
步骤三、通过控制器模块(2)控制驱动电机(5)工作,带动全向轮(8)转动,检测装置在待检测的金属表面爬行,爬行过程中遇到障碍物时,超声波避障模块(9)发出信号到控制器模块(2)中,作业人员通过云台摄像头(4)查看障碍物的形状大小和具体位置,并调整检测装置绕过障碍物;
步骤四、通过控制器模块(2)控制云台摄像头(4)工作,对检测空间进行全方位可视化检测;
步骤五、当遇到云台摄像头(4)无法看清的狭小空间时,通过控制器模块(2)控制微型摄像头伸缩模块(3)工作,将微型摄像头(7)伸入狭小空间内进行可视化检测;
步骤六、整个检测作业完成后,作业人员用手拖住检测装置,按下检测结束按钮,电永磁铁吸附模块(6)磁力消失,将检测装置从金属表面取下。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011381383.3A CN112441155B (zh) | 2020-11-30 | 2020-11-30 | 一种爬壁检测装置及其检测方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011381383.3A CN112441155B (zh) | 2020-11-30 | 2020-11-30 | 一种爬壁检测装置及其检测方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112441155A CN112441155A (zh) | 2021-03-05 |
| CN112441155B true CN112441155B (zh) | 2022-02-08 |
Family
ID=74739160
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011381383.3A Active CN112441155B (zh) | 2020-11-30 | 2020-11-30 | 一种爬壁检测装置及其检测方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112441155B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118555994A (zh) * | 2022-01-31 | 2024-08-27 | Abb瑞士股份有限公司 | 移动机器人、方法和控制系统 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1886904A2 (en) * | 2006-08-11 | 2008-02-13 | Ascend RMM, S.L. | Climbing cleaning robot |
| CN203634756U (zh) * | 2013-12-20 | 2014-06-11 | 李瑾 | 伸缩捡球杆 |
| CN104953512A (zh) * | 2015-07-09 | 2015-09-30 | 国家电网公司 | 电缆管穿线机 |
| CN206060935U (zh) * | 2016-08-31 | 2017-03-29 | 江苏三步网络科技有限公司 | 一种图像行为分析跟踪摄像机 |
| CN206100319U (zh) * | 2016-10-20 | 2017-04-12 | 广东电网有限责任公司东莞供电局 | 地下沟道的内部状态检测装置 |
| CN206411021U (zh) * | 2017-01-17 | 2017-08-15 | 重庆邮电大学 | 基于图像分析的天然气泄露检测机器人系统 |
| CN206790603U (zh) * | 2017-06-19 | 2017-12-22 | 国网新疆电力公司博尔塔拉供电公司 | 一种电力设备专用拍摄装置 |
| CN108942869A (zh) * | 2018-09-02 | 2018-12-07 | 南京吉目希自动化科技有限公司 | 一种智能全向移动机器人 |
| CN109436639A (zh) * | 2018-10-12 | 2019-03-08 | 桐城市立行电子科技有限公司 | 一种搬运用仓储机器人 |
| CN209002086U (zh) * | 2018-12-28 | 2019-06-18 | 上海合时智能科技有限公司 | 基于多图像的全景摄像头 |
| CN110080380A (zh) * | 2019-05-25 | 2019-08-02 | 广东聚晟建设工程有限公司 | 管内淤堵清淤设备及工艺 |
| CN209897193U (zh) * | 2019-08-13 | 2020-01-03 | 安徽居博士智能科技有限公司 | 智慧社区物联网视频监控装置 |
| CN210161170U (zh) * | 2019-05-16 | 2020-03-20 | 尹建国 | 深井救援探测机器人 |
| CN111348115A (zh) * | 2018-12-21 | 2020-06-30 | 核动力运行研究所 | 一种电永磁吸附式爬壁检修机器人 |
-
2020
- 2020-11-30 CN CN202011381383.3A patent/CN112441155B/zh active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1886904A2 (en) * | 2006-08-11 | 2008-02-13 | Ascend RMM, S.L. | Climbing cleaning robot |
| CN203634756U (zh) * | 2013-12-20 | 2014-06-11 | 李瑾 | 伸缩捡球杆 |
| CN104953512A (zh) * | 2015-07-09 | 2015-09-30 | 国家电网公司 | 电缆管穿线机 |
| CN206060935U (zh) * | 2016-08-31 | 2017-03-29 | 江苏三步网络科技有限公司 | 一种图像行为分析跟踪摄像机 |
| CN206100319U (zh) * | 2016-10-20 | 2017-04-12 | 广东电网有限责任公司东莞供电局 | 地下沟道的内部状态检测装置 |
| CN206411021U (zh) * | 2017-01-17 | 2017-08-15 | 重庆邮电大学 | 基于图像分析的天然气泄露检测机器人系统 |
| CN206790603U (zh) * | 2017-06-19 | 2017-12-22 | 国网新疆电力公司博尔塔拉供电公司 | 一种电力设备专用拍摄装置 |
| CN108942869A (zh) * | 2018-09-02 | 2018-12-07 | 南京吉目希自动化科技有限公司 | 一种智能全向移动机器人 |
| CN109436639A (zh) * | 2018-10-12 | 2019-03-08 | 桐城市立行电子科技有限公司 | 一种搬运用仓储机器人 |
| CN111348115A (zh) * | 2018-12-21 | 2020-06-30 | 核动力运行研究所 | 一种电永磁吸附式爬壁检修机器人 |
| CN209002086U (zh) * | 2018-12-28 | 2019-06-18 | 上海合时智能科技有限公司 | 基于多图像的全景摄像头 |
| CN210161170U (zh) * | 2019-05-16 | 2020-03-20 | 尹建国 | 深井救援探测机器人 |
| CN110080380A (zh) * | 2019-05-25 | 2019-08-02 | 广东聚晟建设工程有限公司 | 管内淤堵清淤设备及工艺 |
| CN209897193U (zh) * | 2019-08-13 | 2020-01-03 | 安徽居博士智能科技有限公司 | 智慧社区物联网视频监控装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112441155A (zh) | 2021-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10249395B2 (en) | Cleaning device for bottom surfaces | |
| CN113700999B (zh) | 一种电力施工监控装置的使用方法 | |
| CN112441155B (zh) | 一种爬壁检测装置及其检测方法 | |
| CN201325591Y (zh) | 耐辐照水下监测机器人 | |
| CN212455959U (zh) | 一种管道变形检测装置 | |
| CN109591030A (zh) | 一种室内巡检机器人 | |
| KR101226222B1 (ko) | 수륙양용 이동촬영장치 및 이를 이용한 하수관거 촬영방법 | |
| CN110672728A (zh) | 一种墙面检测装置 | |
| CN117528027B (zh) | 一种基于bim技术的施工管理系统 | |
| CN218387677U (zh) | 一种用于采气井日常监控装置 | |
| JP4504744B2 (ja) | ダクト清掃ロボットのカメラ撮像モニターシステムと、それを用いたダクト清掃方法 | |
| JP2006143089A (ja) | 液中作業装置及び液中作業方法 | |
| CN213705614U (zh) | 一种爬壁检测装置 | |
| CN216861634U (zh) | 爬壁机器人 | |
| CN210487622U (zh) | 一种管道综合探测检测系统 | |
| CN213141330U (zh) | 一种支撑面移动装置 | |
| CN106440930A (zh) | 一种间冷塔清洗装置和间冷系统 | |
| CN114436176A (zh) | 一种支撑面移动装置 | |
| JP2592989B2 (ja) | 管内作業装置 | |
| JPH07181286A (ja) | 原子炉内遠隔作業方法および装置 | |
| CN206258019U (zh) | 一种间冷塔清洗装置和间冷系统 | |
| CN110689977A (zh) | 适用于蒸汽发生器管板的视频检查设备及检查方法 | |
| CN114379753A (zh) | 一种支撑面移动装置 | |
| CN117817682B (zh) | 一种输水隧洞水下检测机器人及使用方法 | |
| CN219062814U (zh) | 核电厂管道自动视频检查装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| EE01 | Entry into force of recordation of patent licensing contract | ||
| EE01 | Entry into force of recordation of patent licensing contract |
Application publication date: 20210305 Assignee: Xi'an Weiqin Network Technology Co.,Ltd. Assignor: XI'AN University OF POSTS & TELECOMMUNICATIONS Contract record no.: X2022980017945 Denomination of invention: Wall climbing detection device and detection method Granted publication date: 20220208 License type: Common License Record date: 20221011 |