CN112141709A - 一种真空负压式瓷砖搬运装置 - Google Patents
一种真空负压式瓷砖搬运装置 Download PDFInfo
- Publication number
- CN112141709A CN112141709A CN202011102934.8A CN202011102934A CN112141709A CN 112141709 A CN112141709 A CN 112141709A CN 202011102934 A CN202011102934 A CN 202011102934A CN 112141709 A CN112141709 A CN 112141709A
- Authority
- CN
- China
- Prior art keywords
- rod
- negative pressure
- rotating
- pressure adsorption
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/08—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for ceramic mouldings
Landscapes
- Engineering & Computer Science (AREA)
- Ceramic Engineering (AREA)
- Hooks, Suction Cups, And Attachment By Adhesive Means (AREA)
Abstract
本发明公开了一种真空负压式瓷砖搬运装置,涉及瓷砖搬运相关领域,为解决目前真空负压式瓷砖搬运装置搬运动作的自由度较低,导致搬运动作僵硬,不能进行多方位的调节的问题。所述电控仓上端的一侧设置有固定臂,所述固定臂的上端安装有转动臂,所述固定臂与转动臂通过固定片连接,所述电控仓上端沿固定臂的一侧安装有第一转动调节气缸,所述固定片一侧沿转动臂的下端安装有伸长调节气缸,所述转动臂的内部设置有中间推杆,所述中间推杆与伸长调节气缸的输出杆端连接有连接板,所述连接板由第一转动连接部、支撑杆部和第二转动连接部三部分构成。
Description
技术领域
本发明涉及瓷砖搬运相关领域,具体为一种真空负压式瓷砖搬运装置。
背景技术
现在建筑装修装饰中,瓷砖是进行外立面或者内立面装饰和地面铺装的主要材料,但是随着现代对瓷砖各项材料的开发以及对于美观度的不同要求,瓷砖的平面面积和重量越来越大,依靠人工很难进行搬运,搬运效率较低,因此出现了各种搬运装置进行自动搬运。随着机械技术的发展成熟,传统的机械爪搬运结构逐渐被真空负压式搬运装置代替,真空负压式搬运装置的吸附吸盘能够避免对瓷砖表面造成损伤。
但目前真空负压式瓷砖搬运装置搬运动作的自由度较低,在瓷砖搬运过程中瓷砖的调节位置和调节形态有限,导致搬运动作僵硬,不能进行多方位的调节,不能根据操作环境改变当前瓷砖的搬运状态;因此市场急需研制一种真空负压式瓷砖搬运装置来帮助人们解决现有的问题。
发明内容
本发明的目的在于提供一种真空负压式瓷砖搬运装置,以解决上述背景技术中提出的目前真空负压式瓷砖搬运装置搬运动作的自由度较低,导致搬运动作僵硬,不能进行多方位的调节的问题。
为实现上述目的,本发明提供如下技术方案:一种真空负压式瓷砖搬运装置,包括电控仓,所述电控仓上端的一侧设置有固定臂,固定臂与电控仓固定连接,所述固定臂的上端安装有转动臂,所述固定臂与转动臂通过固定片连接,固定片位于固定臂和转动臂的前后两端,固定片与转动臂固定连接,固定片与固定臂通过转轴转动连接,所述电控仓上端沿固定臂的一侧安装有第一转动调节气缸,第一转动调节气缸的下端延伸至电控仓的内部与电控仓的底板通过转动件转动连接,第一转动调节气缸的输出杆通过转动件与转动臂转动连接,所述固定片一侧沿转动臂的下端安装有伸长调节气缸,伸长调节气缸与固定片通过转轴转动连接,所述转动臂的内部设置有中间推杆,中间推杆与转动臂伸缩连接,所述中间推杆与伸长调节气缸的输出杆端连接有连接板,所述连接板由第一转动连接部、支撑杆部和第二转动连接部三部分构成,第一转动连接部、支撑杆部和第二转动连接部依次设置,第一转动连接部、支撑杆部和第二转动连接部一体成型,中间推杆和伸长调节气缸的输出杆均与连接板的第一转动连接部通过转轴转动连接,所述连接板上安装有第二转动调节气缸,第二转动调节气缸与连接板的第二转动连接部通过转轴转动连接,所述第二转动调节气缸的输出杆端连接有第一转动连杆,第二转动调节气缸的输出杆与第一转动连杆通过转轴转动连接,第一转动连杆的另一端与连接板的第一转动连接部通过转轴转动连接,所述第一转动连杆的下端连接有第二转动连杆,第二转动连杆的一端与第一转动连杆的中间部通过转轴转动连接,所述第二转动连杆的下端设置有转动片,第二转动连杆的另一端与转动片通过转轴转动连接,转动片与连接板的第一转动连接部通过转轴转动连接,所述转动片的下端设置有真空负压吸附单元。
优选的,所述真空负压吸附单元上包括驱动连接块、第一连接杆体和第二连接杆体,驱动连接块位于第一连接杆体和第二连接杆体的上端,第一连接杆体和第二连接杆体固定连接,所述第一连接杆体的下端安装有主负压吸附吸盘,所述第二连接杆体的下端安装有辅助负压吸附吸盘。
优选的,所述真空负压吸附单元上还包括旋转套筒、旋转中间轴、支撑板、限位板、限位螺杆和连接平台,连接平台位于驱动连接块的一端,连接平台与驱动连接块固定连接,连接平台另一端沿驱动连接块两侧设置有三角加固,支撑板位于连接平台一端的两侧,支撑板与连接平台固定连接,旋转套筒位于两个支撑板之间的上端,旋转套筒与支撑板通过旋转中间轴连接,旋转中间轴与旋转套筒固定连接,旋转中间轴与支撑板转动连接,转动片下端与旋转套筒固定连接,限位板位于旋转套筒外侧沿转动片的一侧,限位板设置为圆形,限位板与旋转套筒固定连接,限位板上设置有多个限位孔,多个限位孔以旋转中间轴的圆心为圆心排列,限位板与支撑板通过限位螺杆限位连接,限位螺杆外侧沿支撑板一侧设置有锁紧螺母。
优选的,所述第一连接杆体和第二连接杆体上均设置有移动套管,主负压吸附吸盘通过移动套管与第一连接杆体连接,辅助负压吸附吸盘通过移动套管与第二连接杆体连接,所述主负压吸附吸盘和辅助负压吸附吸盘均包括固定板、缓冲套管、缓冲中间杆和缓冲弹簧,固定板位于移动套管一端,固定板与移动套管固定连接,缓冲中间杆位于缓冲套管的一端,缓冲中间杆与缓冲套管伸缩连接,缓冲弹簧位于缓冲中间杆的外部,缓冲弹簧的一端与移动套管固定连接,缓冲弹簧的另一端与主负压吸附吸盘和辅助负压吸附吸盘上的连接件固定连接。
优选的,所述第一连接杆体和第二连接杆体上均设置有移动槽,移动套管上设置有安装孔,所述第一连接杆体和第二连接杆体与移动套管通过固定螺杆和固定螺母固定,固定螺杆的直径小于移动槽的宽度,固定螺杆穿过移动套管上安装孔和移动槽与固定螺母通过螺纹固定,所述第一连接杆体和第二连接杆体内部沿固定螺杆的外侧设置有压力弹簧,压力弹簧的直径大于移动槽的宽度。
优选的,所述主负压吸附吸盘和辅助负压吸附吸盘上均设置有弹簧连接管,弹簧连接管与主负压吸附吸盘和辅助负压吸附吸盘的内部连通,多个弹簧连接管的另一端连接有总管。
优选的,所述电控仓下端的一侧安装有驱动前轮,所述驱动前轮上端沿电控仓的两端设置有防护挡板,防护挡板与电控仓焊接固定,所述电控仓下端的另一侧安装有转向轮,所述转向轮上端的前后两端设置有配重挡板,前后两端所述配重挡板中间的上端安装有方向手柄,方向手柄的控制杆与转向轮连接,固定臂一侧的中间固定连接有固定块,方向手柄与固定块通过转轴转动连接。
优选的,所述固定臂前端的中间安装有信号接收器,电控仓的内部安装有真空泵,总管延伸至电控仓的内部与真空泵连接。
与现有技术相比,本发明的有益效果是:
1、该发明中,电控仓的内部安装有第一转动调节气缸,第一转动调节气缸延伸至外侧,第一转动调节气缸的输出杆伸长状态下能够通过转动件带动转动臂以固定片和固定臂的连接点为中心进行转动,而转动臂的前端通过连接板连接有第二转动调节气缸,第二转动调节气缸的输出杆伸长能够带动第一转动连杆进行转动,第一转动连杆与第二转动连杆转动连接,第一转动连杆与连接板转动连接,第二转动连杆与转动片转动连接,转动片与连接板转动连接,转动片的下端安装有真空负压吸附单元,第二转动调节气缸的输出杆带动第一转动连杆转动的情况下,通过连接板、第一转动连杆、第二转动连杆和转动片之间的联动使真空负压吸附单元在竖向平面进行转动,且真空负压吸附单元的转动相对稳定,伸长调节气缸的输出杆与连接板连接,伸长调节气缸的输出杆带动连接板滑动时,与连接板连接的中间推杆从转动臂内部滑出,从而带动真空负压吸附单元沿着中间推杆和转动臂方向进行移动,通过第一转动调节气缸、伸长调节气缸和第二转动调节气缸三个气缸的工作使本装置的自由度增加,搬运动作流畅,真空负压吸附单元能够通过通过第一转动调节气缸、伸长调节气缸和第二转动调节气缸三个气缸的工作改变倾斜形态和位置状态,能够多方位的调节,根据实际操作环境调节瓷砖的位置,避免瓷砖被损坏,从而解决了目前真空负压式瓷砖搬运装置搬运动作的自由度较低,导致搬运动作僵硬,不能进行多方位的调节的问题。
2、该发明中,真空负压吸附单元上第一连接杆体和第二连接杆体通过移动套管与主负压吸附吸盘和辅助负压吸附吸盘连接,在移动套管的一端沿主负压吸附吸盘和辅助负压吸附吸盘的上端增加有移动套管、固定板、缓冲套管、缓冲中间杆和缓冲弹簧,主负压吸附吸盘和辅助负压吸附吸盘与瓷砖接触后,缓冲中间杆会有部分收缩进缓冲套管的内部,缓冲弹簧被压缩,给予瓷砖反作用力,从而使真空负压吸附单元与瓷砖接触时有缓冲,不会因硬性接触而对瓷砖造成部分冲击,通过缓冲结构的设置,增加了本装置搬运瓷砖时对瓷砖的防护效果。
3、该发明中,移动套管在第一连接杆体和第二连接杆体上可以进行移动,固定螺杆沿着第一连接杆体或者第二连接杆体的移动槽移动,移动至合适位置后通过固定螺母对固定螺杆进行锁紧,通过固定螺杆的螺帽和固定螺母对中间方向的压紧作用实现移动套管与第一连接杆体或者第二连接杆体的相对固定,而第一连接杆体或者第二连接杆体内部沿固定螺杆的外侧设置有压力弹簧,固定螺杆的螺帽和固定螺母对中间方向的压紧下,压力弹簧的压缩量增加,对第一连接杆体或者第二连接杆体有中间向外侧的反作用力,通过由内向外和由内向外两个方向的作用下对移动套管与第一连接杆体或者第二连接杆体进行固定,保证固定效果。
4、该发明中,真空负压吸附单元的第一连接杆体上增加有驱动连接块,在驱动连接块上端增加有连接平台,连接平台上端设置有支撑板,转动片与支撑板通过旋转套筒连接,而旋转套筒外侧沿转动片的一侧固定连接有限位螺杆,解除限位螺杆对限位板的限位时,限位板、旋转套筒带动转动片能够转动,而限位板上设置多个限位孔,前后调节至目标角度后通过限位螺杆重新固定,使真空负压吸附单元相对于转动片前后方向的角度有调整,而驱动连接块内部设置有驱动件能够驱动真空负压吸附单元转动,在多个结构的配合下,在真空负压吸附单元到达目标位置后可以自由调节真空负压吸附单元的前后倾斜角度和水平面的转动角度,而不需要重新驱动整个设备移动来调节与瓷砖的相对位置,自由度更大,能够配合不同姿态的瓷砖,实现瓷砖的转运。
附图说明
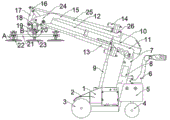
图1为本发明的一种真空负压式瓷砖搬运装置的主视图;
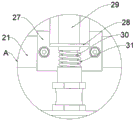
图2为本发明的A处结构放大图;
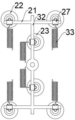
图3为本发明的真空负压吸附单元的俯视图;
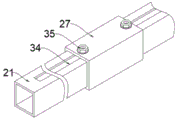
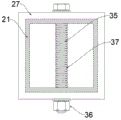
图4为本发明的第一连接杆体和移动套管的连接结构示意图;
图5为本发明的第一连接杆体和移动套管的连接结构侧视图;
图6为本发明的B处结构放大图;
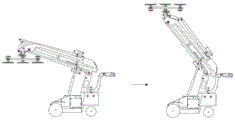
图7为本发明的一种真空负压式瓷砖搬运装置的工作过程变化图。
图中:1、电控仓;2、防护挡板;3、驱动前轮;4、转向轮;5、配重挡板;6、方向手柄;7、固定臂;8、信号接收器;9、第一转动调节气缸;10、转动臂;11、固定片;12、中间推杆;13、伸长调节气缸;14、第二转动调节气缸;15、连接板;16、第一转动连杆;17、第二转动连杆;18、转动片;19、真空负压吸附单元;20、驱动连接块;21、第一连接杆体;22、主负压吸附吸盘;23、辅助负压吸附吸盘;24、第一转动连接部;25、支撑杆部;26、第二转动连接部;27、移动套管;28、固定板;29、缓冲套管;30、缓冲中间杆;31、缓冲弹簧;32、第二连接杆体;33、弹簧连接管;34、移动槽;35、固定螺杆;36、固定螺母;37、压力弹簧;38、旋转套筒;39、旋转中间轴;40、支撑板;41、限位板;42、限位螺杆;43、连接平台。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
请参阅图1-7,本发明提供的一种实施例:一种真空负压式瓷砖搬运装置,包括电控仓1,电控仓1上端的一侧设置有固定臂7,固定臂7与电控仓1固定连接,固定臂7的上端安装有转动臂10,固定臂7与转动臂10通过固定片11连接,固定片11位于固定臂7和转动臂10的前后两端,固定片11与转动臂10固定连接,固定片11与固定臂7通过转轴转动连接,电控仓1上端沿固定臂7的一侧安装有第一转动调节气缸9,第一转动调节气缸9的下端延伸至电控仓1的内部与电控仓1的底板通过转动件转动连接,第一转动调节气缸9的输出杆通过转动件与转动臂10转动连接,第一转动调节气缸9的输出杆收缩,通过转动件带动转动臂以固定片11和固定臂7的连接点为中心进行转动,固定片11一侧沿转动臂10的下端安装有伸长调节气缸13,伸长调节气缸13与固定片11通过转轴转动连接,转动臂10的内部设置有中间推杆12,中间推杆12与转动臂10伸缩连接,中间推杆12与伸长调节气缸13的输出杆端连接有连接板15,伸长调节气缸13的输出杆伸长,与连接板15连接的中间推杆12从转动臂10内部滑出,从而可以使吸附相关结构可以沿着中间推杆12和转动臂10方向进行移动,移动至瓷砖的一端,连接板15由第一转动连接部24、支撑杆部25和第二转动连接部26三部分构成,第一转动连接部24、支撑杆部25和第二转动连接部26依次设置,第一转动连接部24、支撑杆部25和第二转动连接部26一体成型,中间推杆12和伸长调节气缸13的输出杆均与连接板15的第一转动连接部24通过转轴转动连接,连接板15上安装有第二转动调节气缸14,第二转动调节气缸14与连接板15的第二转动连接部26通过转轴转动连接,第二转动调节气缸14的输出杆端连接有第一转动连杆16,第二转动调节气缸14的输出杆与第一转动连杆16通过转轴转动连接,第一转动连杆16的另一端与连接板15的第一转动连接部24通过转轴转动连接,第一转动连杆16的下端连接有第二转动连杆17,第二转动连杆17的一端与第一转动连杆16的中间部通过转轴转动连接,第二转动连杆17的下端设置有转动片18,第二转动连杆17的另一端与转动片18通过转轴转动连接,转动片18与连接板15的第一转动连接部24通过转轴转动连接,转动片18的下端设置有真空负压吸附单元19,第二转动调节气缸14的输出杆伸长带动第一转动连杆16进行转动,通过连接板15、第一转动连杆16、第二转动连杆17和转动片18之间的联动使真空负压吸附单元19在竖向平面进行转动。
进一步,真空负压吸附单元19上包括驱动连接块20、第一连接杆体21和第二连接杆体32,驱动连接块20内部设置有微型电机和减速齿轮,其输出轴带动第一连接杆体21和第二连接杆体32可低速转动,从而调节角度(以图1为例,其带动第一连接杆体21和第二连接杆体32沿水平面转动),驱动连接块20位于第一连接杆体21和第二连接杆体32的上端,第一连接杆体21和第二连接杆体32固定连接,第一连接杆体21的下端安装有主负压吸附吸盘22,主负压吸附吸盘22为主要吸附固定结构,第二连接杆体32的下端安装有辅助负压吸附吸盘23,主负压吸附吸盘22为四点吸附固定,为了增加吸附面积提高吸附稳定性增加有辅助负压吸附吸盘23。
进一步,真空负压吸附单元19上还包括旋转套筒38、旋转中间轴39、支撑板40、限位板41、限位螺杆42和连接平台43,连接平台43位于驱动连接块20的一端,连接平台43与驱动连接块20固定连接,连接平台43另一端沿驱动连接块20两侧设置有三角加固,支撑板40位于连接平台43一端的两侧,支撑板40与连接平台43固定连接,旋转套筒38位于两个支撑板40之间的上端,旋转套筒38与支撑板40通过旋转中间轴39连接,旋转中间轴39与旋转套筒38固定连接,旋转中间轴39与支撑板40转动连接,转动片18下端与旋转套筒38固定连接,限位板41位于旋转套筒38外侧沿转动片18的一侧,限位板41设置为圆形,限位板41与旋转套筒38固定连接,限位板41上设置有多个限位孔,多个限位孔以旋转中间轴39的圆心为圆心排列,限位板41与支撑板40通过限位螺杆42限位连接,因此可以调节真空负压吸附单元19前后倾斜角度,只要将限位螺杆42穿过限位板41上不同位置的限位孔后固定即可,限位螺杆42外侧沿支撑板40一侧设置有锁紧螺母,进一步锁紧固定,保证真空负压吸附单元19前后倾斜角度的固定。
进一步,第一连接杆体21和第二连接杆体32上均设置有移动套管27,主负压吸附吸盘22通过移动套管27与第一连接杆体21连接,辅助负压吸附吸盘23通过移动套管27与第二连接杆体32连接,主负压吸附吸盘22和辅助负压吸附吸盘23均包括固定板28、缓冲套管29、缓冲中间杆30和缓冲弹簧31,固定板28位于移动套管27一端,固定板28与移动套管27固定连接,缓冲中间杆30位于缓冲套管29的一端,缓冲中间杆30与缓冲套管29伸缩连接,缓冲弹簧31位于缓冲中间杆30的外部,缓冲弹簧31的一端与移动套管27固定连接,缓冲弹簧31的另一端与主负压吸附吸盘22和辅助负压吸附吸盘23上的连接件固定连接。
进一步,第一连接杆体21和第二连接杆体32上均设置有移动槽34,移动套管27上设置有安装孔,第一连接杆体21和第二连接杆体32与移动套管27通过固定螺杆35和固定螺母36固定,固定螺杆35的直径小于移动槽34的宽度,固定螺杆35穿过移动套管27上安装孔和移动槽34与固定螺母36通过螺纹固定,第一连接杆体21和第二连接杆体32内部沿固定螺杆35的外侧设置有压力弹簧37,压力弹簧37的直径大于移动槽34的宽度,压力弹簧37两端不固定,通过压力弹簧37自身的回弹力向外压第一连接杆体21或第二连接杆体32。
进一步,主负压吸附吸盘22和辅助负压吸附吸盘23上均设置有弹簧连接管33,真空负压吸附单元19需要进行转动操作,因此弹簧连接管33可以给真空负压吸附单元19一定转动空间的情况下不影响负压吸附性,弹簧连接管33与主负压吸附吸盘22和辅助负压吸附吸盘23的内部连通,多个弹簧连接管33的另一端连接有总管。
进一步,电控仓1下端的一侧安装有驱动前轮3,驱动前轮3上端沿电控仓1的两端设置有防护挡板2,防护挡板2与电控仓1焊接固定,电控仓1下端的另一侧安装有转向轮4,转向轮4上端的前后两端设置有配重挡板5,前后两端配重挡板5中间的上端安装有方向手柄6,方向手柄6和电控仓1一侧上均设置有一些操作控制按钮,推动本装置移动到目标位置后不需要改变站立位置,直接通过面前的按钮进行控制,其中的电路连接等为成熟技术,主要为控制开关,因此不具体介绍,方向手柄6的控制杆与转向轮4连接,固定臂7一侧的中间固定连接有固定块,方向手柄6与固定块通过转轴转动连接。
进一步,固定臂7前端的中间安装有信号接收器8,为本装置增加另外的控制方式,通过一遥控器控制,信号接收器8接收到遥控器的控制信号后进行控制操作,可以通过遥控控制的方式增加本安装使用的安全系数,电控仓1的内部安装有真空泵,还安装有电源等设备,总管延伸至电控仓1的内部与真空泵连接。
工作原理:使用时,操作人员推动本装置,通过电控仓1内驱动设备的缓慢转动带动驱动前轮3进行移动,需要转向时转动方向手柄6,转向轮4相应转动,从而带动整个装置转向,使本装置移动至搬运开始位置。第一转动调节气缸9的输出杆收缩,通过转动件带动转动臂以固定片11和固定臂7的连接点为中心进行转动,第二转动调节气缸14的输出杆伸长带动第一转动连杆16进行转动,第一转动连杆16与第二转动连杆17转动连接,第一转动连杆16与连接板15转动连接,第二转动连杆17与转动片18转动连接,转动片18与连接板15转动连接,转动片18的下端安装有真空负压吸附单元19,通过连接板15、第一转动连杆16、第二转动连杆17和转动片18之间的联动使真空负压吸附单元19在竖向平面进行转动,使真空负压吸附单元19到达水平状态。伸长调节气缸13的输出杆伸长,与连接板15连接的中间推杆12从转动臂10内部滑出,带动真空负压吸附单元19沿着中间推杆12和转动臂10方向进行移动,使真空负压吸附单元19移动至瓷砖的上端(上述针对的是瓷砖水平放置的情况,如若瓷砖斜向或者竖向放置,依旧通过第一转动调节气缸9、伸长调节气缸13和第二转动调节气缸14的配合工作,使真空负压吸附单元19移动能与瓷砖贴合固定的一侧)。当瓷砖的放置角度不合适真空负压吸附单元19固定时,驱动连接块20内微型电机和减速齿轮的输出轴带动第一连接杆体21和第二连接杆体32低速转动,调节在该平面的转动角度,若是瓷砖与真空负压吸附单元19之间不是平行,之间有一定夹角时,为使真空负压吸附单元19的主负压吸附吸盘22和辅助负压吸附吸盘23能够同时与瓷砖接触,不需要驱动设备移动重新靠近,而是调节限位螺杆42和锁紧螺母,解除对限位板41的限位,前后转动真空负压吸附单元19,到达合适位置后,将限位螺杆42穿过限位板41上对应位置限位孔,通过锁紧螺母锁紧,使瓷砖与真空负压吸附单元19之间平行,能够正常吸附固定。电控仓1内真空泵工作,通过与多个弹簧连接管33连接的总管吸附弹簧连接管33内的空气,而弹簧连接管33与主负压吸附吸盘22和辅助负压吸附吸盘23内部连通,从而吸附主负压吸附吸盘22和辅助负压吸附吸盘23内的空气,使主负压吸附吸盘22和辅助负压吸附吸盘23内部负压,对瓷砖进行吸附,瓷砖吸附固定后,通过第一转动调节气缸9、伸长调节气缸13和第二转动调节气缸14的配合工作使瓷砖的位置和形态调节至合适位置,操作人员推动本装置,通过电控仓1内驱动设备的缓慢转动带动驱动前轮3进行移动,直至移动至目标位置,依旧通过第一转动调节气缸9、伸长调节气缸13和第二转动调节气缸14的配合工作使瓷砖到达指定放置位置,电控仓1内真空泵通过总管和弹簧连接管33向主负压吸附吸盘22和辅助负压吸附吸盘23内部输入一定量的空气,解除真空负压吸附单元19对瓷砖的吸附固定,完成一次搬运工作。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
Claims (8)
1.一种真空负压式瓷砖搬运装置,包括电控仓(1),其特征在于:所述电控仓(1)上端的一侧设置有固定臂(7),固定臂(7)与电控仓(1)固定连接,所述固定臂(7)的上端安装有转动臂(10),所述固定臂(7)与转动臂(10)通过固定片(11)连接,固定片(11)位于固定臂(7)和转动臂(10)的前后两端,固定片(11)与转动臂(10)固定连接,固定片(11)与固定臂(7)通过转轴转动连接,所述电控仓(1)上端沿固定臂(7)的一侧安装有第一转动调节气缸(9),第一转动调节气缸(9)的下端延伸至电控仓(1)的内部与电控仓(1)的底板通过转动件转动连接,第一转动调节气缸(9)的输出杆通过转动件与转动臂(10)转动连接,所述固定片(11)一侧沿转动臂(10)的下端安装有伸长调节气缸(13),伸长调节气缸(13)与固定片(11)通过转轴转动连接,所述转动臂(10)的内部设置有中间推杆(12),中间推杆(12)与转动臂(10)伸缩连接,所述中间推杆(12)与伸长调节气缸(13)的输出杆端连接有连接板(15),所述连接板(15)由第一转动连接部(24)、支撑杆部(25)和第二转动连接部(26)三部分构成,第一转动连接部(24)、支撑杆部(25)和第二转动连接部(26)依次设置,第一转动连接部(24)、支撑杆部(25)和第二转动连接部(26)一体成型,中间推杆(12)和伸长调节气缸(13)的输出杆均与连接板(15)的第一转动连接部(24)通过转轴转动连接,所述连接板(15)上安装有第二转动调节气缸(14),第二转动调节气缸(14)与连接板(15)的第二转动连接部(26)通过转轴转动连接,所述第二转动调节气缸(14)的输出杆端连接有第一转动连杆(16),第二转动调节气缸(14)的输出杆与第一转动连杆(16)通过转轴转动连接,第一转动连杆(16)的另一端与连接板(15)的第一转动连接部(24)通过转轴转动连接,所述第一转动连杆(16)的下端连接有第二转动连杆(17),第二转动连杆(17)的一端与第一转动连杆(16)的中间部通过转轴转动连接,所述第二转动连杆(17)的下端设置有转动片(18),第二转动连杆(17)的另一端与转动片(18)通过转轴转动连接,转动片(18)与连接板(15)的第一转动连接部(24)通过转轴转动连接,所述转动片(18)的下端设置有真空负压吸附单元(19)。
2.根据权利要求1所述的一种真空负压式瓷砖搬运装置,其特征在于:所述真空负压吸附单元(19)上包括驱动连接块(20)、第一连接杆体(21)和第二连接杆体(32),驱动连接块(20)位于第一连接杆体(21)和第二连接杆体(32)的上端,第一连接杆体(21)和第二连接杆体(32)固定连接,所述第一连接杆体(21)的下端安装有主负压吸附吸盘(22),所述第二连接杆体(32)的下端安装有辅助负压吸附吸盘(23)。
3.根据权利要求2所述的一种真空负压式瓷砖搬运装置,其特征在于:所述真空负压吸附单元(19)上还包括旋转套筒(38)、旋转中间轴(39)、支撑板(40)、限位板(41)、限位螺杆(42)和连接平台(43),连接平台(43)位于驱动连接块(20)的一端,连接平台(43)与驱动连接块(20)固定连接,连接平台(43)另一端沿驱动连接块(20)两侧设置有三角加固,支撑板(40)位于连接平台(43)一端的两侧,支撑板(40)与连接平台(43)固定连接,旋转套筒(38)位于两个支撑板(40)之间的上端,旋转套筒(38)与支撑板(40)通过旋转中间轴(39)连接,旋转中间轴(39)与旋转套筒(38)固定连接,旋转中间轴(39)与支撑板(40)转动连接,转动片(18)下端与旋转套筒(38)固定连接,限位板(41)位于旋转套筒(38)外侧沿转动片(18)的一侧,限位板(41)设置为圆形,限位板(41)与旋转套筒(38)固定连接,限位板(41)上设置有多个限位孔,多个限位孔以旋转中间轴(39)的圆心为圆心排列,限位板(41)与支撑板(40)通过限位螺杆(42)限位连接,限位螺杆(42)外侧沿支撑板(40)一侧设置有锁紧螺母。
4.根据权利要求2所述的一种真空负压式瓷砖搬运装置,其特征在于:所述第一连接杆体(21)和第二连接杆体(32)上均设置有移动套管(27),主负压吸附吸盘(22)通过移动套管(27)与第一连接杆体(21)连接,辅助负压吸附吸盘(23)通过移动套管(27)与第二连接杆体(32)连接,所述主负压吸附吸盘(22)和辅助负压吸附吸盘(23)均包括固定板(28)、缓冲套管(29)、缓冲中间杆(30)和缓冲弹簧(31),固定板(28)位于移动套管(27)一端,固定板(28)与移动套管(27)固定连接,缓冲中间杆(30)位于缓冲套管(29)的一端,缓冲中间杆(30)与缓冲套管(29)伸缩连接,缓冲弹簧(31)位于缓冲中间杆(30)的外部,缓冲弹簧(31)的一端与移动套管(27)固定连接,缓冲弹簧(31)的另一端与主负压吸附吸盘(22)和辅助负压吸附吸盘(23)上的连接件固定连接。
5.根据权利要求4所述的一种真空负压式瓷砖搬运装置,其特征在于:所述第一连接杆体(21)和第二连接杆体(32)上均设置有移动槽(34),移动套管(27)上设置有安装孔,所述第一连接杆体(21)和第二连接杆体(32)与移动套管(27)通过固定螺杆(35)和固定螺母(36)固定,固定螺杆(35)的直径小于移动槽(34)的宽度,固定螺杆(35)穿过移动套管(27)上安装孔和移动槽(34)与固定螺母(36)通过螺纹固定,所述第一连接杆体(21)和第二连接杆体(32)内部沿固定螺杆(35)的外侧设置有压力弹簧(37),压力弹簧(37)的直径大于移动槽(34)的宽度。
6.根据权利要求2所述的一种真空负压式瓷砖搬运装置,其特征在于:所述主负压吸附吸盘(22)和辅助负压吸附吸盘(23)上均设置有弹簧连接管(33),弹簧连接管(33)与主负压吸附吸盘(22)和辅助负压吸附吸盘(23)的内部连通,多个弹簧连接管(33)的另一端连接有总管。
7.根据权利要求1所述的一种真空负压式瓷砖搬运装置,其特征在于:所述电控仓(1)下端的一侧安装有驱动前轮(3),所述驱动前轮(3)上端沿电控仓(1)的两端设置有防护挡板(2),防护挡板(2)与电控仓(1)焊接固定,所述电控仓(1)下端的另一侧安装有转向轮(4),所述转向轮(4)上端的前后两端设置有配重挡板(5),前后两端所述配重挡板(5)中间的上端安装有方向手柄(6),方向手柄(6)的控制杆与转向轮(4)连接,固定臂(7)一侧的中间固定连接有固定块,方向手柄(6)与固定块通过转轴转动连接。
8.根据权利要求7所述的一种真空负压式瓷砖搬运装置,其特征在于:所述固定臂(7)前端的中间安装有信号接收器(8),电控仓(1)的内部安装有真空泵,总管延伸至电控仓(1)的内部与真空泵连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011102934.8A CN112141709A (zh) | 2020-10-15 | 2020-10-15 | 一种真空负压式瓷砖搬运装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011102934.8A CN112141709A (zh) | 2020-10-15 | 2020-10-15 | 一种真空负压式瓷砖搬运装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112141709A true CN112141709A (zh) | 2020-12-29 |
Family
ID=73952024
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011102934.8A Pending CN112141709A (zh) | 2020-10-15 | 2020-10-15 | 一种真空负压式瓷砖搬运装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112141709A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114644227A (zh) * | 2022-05-18 | 2022-06-21 | 邳州市亿林木业有限公司 | 一种具有防护功能的木材搬运机械手 |
-
2020
- 2020-10-15 CN CN202011102934.8A patent/CN112141709A/zh active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114644227A (zh) * | 2022-05-18 | 2022-06-21 | 邳州市亿林木业有限公司 | 一种具有防护功能的木材搬运机械手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN202321641U (zh) | 玻璃自动上片和下片一体机 | |
| WO2021007884A1 (zh) | 一种立式板材安装搬运机械手设备 | |
| CN112141709A (zh) | 一种真空负压式瓷砖搬运装置 | |
| CN113387177A (zh) | 一种高灵活性高空建材安装平台 | |
| CN210025344U (zh) | 一种工业机器人用机械抓取装置 | |
| CN215254724U (zh) | 倾斜式外立面玻璃幕墙辅助安装设备 | |
| CN213770471U (zh) | 一种施工用吸盘搬运安装装置 | |
| CN213294004U (zh) | 一种真空负压式瓷砖搬运装置 | |
| CN111395715A (zh) | 一种大型地瓷砖辅助铺设机 | |
| CN215407495U (zh) | 一种适用于斜面幕墙的施工装置 | |
| CN114803490A (zh) | 一种装配式混凝土道面板真空吸附式装卸装备 | |
| CN114961192A (zh) | 一种石材运输及辅助铺贴装置 | |
| CN114179112A (zh) | 一种建筑物检测六足式机器人 | |
| CN112012459A (zh) | 一种地砖铺设辅助设备 | |
| CN219931661U (zh) | 一种建筑幕墙安装辅助装置 | |
| CN111809837A (zh) | 一种喷涂抹灰系统及方法 | |
| CN213059204U (zh) | 一种吸盘式板材上料机 | |
| CN218144461U (zh) | 用于吸附玻璃板块的吸盘装置 | |
| CN220392590U (zh) | 一种玻璃转运吸盘车 | |
| CN218614132U (zh) | 一种抓玻璃小车 | |
| CN213949914U (zh) | 一种玻璃移动用辅助用具 | |
| CN109488059A (zh) | 升降式风车停车装置 | |
| CN217439472U (zh) | 一种石材运输及辅助铺贴装置 | |
| CN215438675U (zh) | 一种可调节产品方向角度的吸附工装 | |
| CN220623345U (zh) | 一种建筑室内装饰用3d建模辅助装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |