CN110844811B - 一种用于解决塔式起重机吊装盲区的监控系统 - Google Patents
一种用于解决塔式起重机吊装盲区的监控系统 Download PDFInfo
- Publication number
- CN110844811B CN110844811B CN201911158393.8A CN201911158393A CN110844811B CN 110844811 B CN110844811 B CN 110844811B CN 201911158393 A CN201911158393 A CN 201911158393A CN 110844811 B CN110844811 B CN 110844811B
- Authority
- CN
- China
- Prior art keywords
- camera
- lifting hook
- arc
- rotating
- water storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 30
- 210000000078 claw Anatomy 0.000 claims abstract description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 56
- 230000001680 brushing effect Effects 0.000 claims description 20
- 238000000034 method Methods 0.000 claims description 15
- 239000004744 fabric Substances 0.000 claims description 14
- 230000008569 process Effects 0.000 claims description 13
- 238000004140 cleaning Methods 0.000 claims description 11
- 238000005406 washing Methods 0.000 claims description 10
- 239000007788 liquid Substances 0.000 claims description 9
- 238000005096 rolling process Methods 0.000 claims description 6
- 238000005201 scrubbing Methods 0.000 claims description 3
- 235000017166 Bambusa arundinacea Nutrition 0.000 claims description 2
- 235000017491 Bambusa tulda Nutrition 0.000 claims description 2
- 241001330002 Bambuseae Species 0.000 claims description 2
- 235000015334 Phyllostachys viridis Nutrition 0.000 claims description 2
- 239000011425 bamboo Substances 0.000 claims description 2
- 238000001125 extrusion Methods 0.000 claims description 2
- 239000000428 dust Substances 0.000 description 5
- 230000001681 protective effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000012806 monitoring device Methods 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 206010040007 Sense of oppression Diseases 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B1/00—Cleaning by methods involving the use of tools
- B08B1/10—Cleaning by methods involving the use of tools characterised by the type of cleaning tool
- B08B1/14—Wipes; Absorbent members, e.g. swabs or sponges
- B08B1/143—Wipes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B1/00—Cleaning by methods involving the use of tools
- B08B1/30—Cleaning by methods involving the use of tools by movement of cleaning members over a surface
- B08B1/32—Cleaning by methods involving the use of tools by movement of cleaning members over a surface using rotary cleaning members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/08—Cleaning involving contact with liquid the liquid having chemical or dissolving effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/46—Position indicators for suspended loads or for crane elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C15/00—Safety gear
- B66C15/04—Safety gear for preventing collisions, e.g. between cranes or trolleys operating on the same track
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- General Chemical & Material Sciences (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
本发明涉及塔吊监控设备领域,公开了一种用于解决塔式起重机吊装盲区的监控系统,包括吊钩、第一摄像头、第二摄像头和驱动装置,所述第一摄像头与所述吊钩固定连接,所述第一摄像头用于监控所述吊钩的勾爪与待吊件的方位;所述第二摄像头设置于所述吊钩外壁,所述第二摄像头用于监控吊钩与相邻建筑的方位;所述驱动装置与所述第二摄像头连接,且所述驱动装置能够驱动所述第二摄像头环绕所述吊钩转动。本发明具有的技术效果,通过驱动电机转动带动带动转动带上的第二摄像头转动,直至第二摄像头摄取到建筑物,停止驱动电机的转动,使得第二摄像头与建筑物保持正对,实时监控吊钩与建筑物之间的间距,避免造成吊钩与建筑物碰撞的意外事故。
Description
技术领域
本发明涉及塔吊监控设备领域,具体而言,涉及一种用于解决塔式起重机吊装盲区的监控系统。
背景技术
目前,普遍使用的塔式起重机在进行操作时,由于操作人员在驾驶室内存在较多盲区,例如操作室与待吊物体之间隔有建筑物,驾驶员无法直观勘测到物体的具体位置,需要有1--2个人在地面的相应位置上进行指挥,以便指挥操作人员进行安全正确的操作,通常地面指挥人员的指挥方式有手式、摆动彩旗、使用移动电话以及使用对讲机等,前述这些指挥方式或多或少都存在着不便和一些不安全因素,如由于起重机驾驶室内的操作人员距离地面较远或因天气原因造成视线不清,导致操作人员在操作过程中极易产生误判;当使用移动电话进行指挥时,经常出现电话受限制或一方突然没电,很容易造成意外事故。申请号为“201320738740.6”的《用于塔式起重机的安全监控装置》提出了一种采用摄像头实现待吊物体监控的安全监控装置,但是操作室与待吊物体之间经常会隔有建筑物,且吊机在调取不同待吊物体时,建筑物与吊钩的相对位置在会变动的,仅靠单一的摄像头无法判断吊钩与建筑物的间距,容易造成吊钩与建筑物碰撞的意外事故的问题。
发明内容
本发明的第一个目的在于提供一种用于解决塔式起重机吊装盲区的监控系统,其解决了操作室与待吊物体之间隔有建筑物时,无法判断吊钩与建筑物的间距,容易造成吊钩与建筑物碰撞的意外事故。
本发明的实施例是这样实现的:
一种用于解决塔式起重机吊装盲区的监控系统,包括吊钩、第一摄像头、第二摄像头和驱动装置,所述第一摄像头与所述吊钩固定连接,所述第一摄像头用于监控所述吊钩的勾爪与待吊件的方位;所述第二摄像头设置于所述吊钩外壁,所述第二摄像头用于监控吊钩与相邻建筑的方位;所述驱动装置与所述第二摄像头连接,且所述驱动装置能够驱动所述第二摄像头环绕所述吊钩转动。
在进一步的方案中,还包括第一固定盘、第二固定盘和转动带,所述吊钩依次贯穿所述第一固定盘与第二固定盘,所述第一固定盘和第二固定盘之间设置有多根转动轴,每根转动轴的两端分别与所述第一固定盘、第二固定盘连接,所述多根转动轴环绕所述吊钩设置,所述转动带包饶于所述多根转动轴的外壁,所述驱动装置包括驱动电机,所述驱动电机设置于所述吊钩的外壁,所述驱动电机的输出轴上设置有齿轮,所述齿轮与所述转动带贴合,所述第二摄像头设置于所述转动带的带面,所述驱动电机带动所述转动带转动时,所述转动带带动所述第二摄像头转动。
在进一步的方案中,所述转动带上设置有第一洗刷组件,所述第一洗刷组件用于洗刷所述第一摄像头的镜面。
在进一步的方案中,所述第一洗刷组件包括第一连接杆,所述第一连接杆设置于所述转动带,所述第一连接杆的长度方向与所述吊钩的升降方向相同,所述第一连接杆上朝吊钩方向设置有凸起,所述凸起上设置有第一擦拭件,所述第一擦拭件于所述转动带转动过程中与所述第一摄像头的镜面接触。
在进一步的方案中,所述第一洗刷组件还包括第一储水筒,所述第一储水筒内存储有清洗液,所述第一储水筒的上连通有第一出水管,所述第一出水管的管口与所述第一擦拭件相对,所述第一储水筒筒内设置有第一活塞,所述第一活塞上设置有用于带动所述活塞沿所述第一储水筒筒长度方向移动的第一活塞杆;所述吊钩外壁可转动设置有第一转动杆,所述转动带上设置有第一撞击件,所述第一撞击件于所述转动带转动过程中撞击所述第一转动杆的尾端时,所述第一转动杆的尾端带动所述第一转动杆转动挤压所述第一活塞杆,所述第一活塞杆推动第一活塞沿所述第一储水筒筒长度方向移动,且所述吊钩外壁设置有第一固定板,所述第一固定板上设置有用于驱动所述第一转动杆复位的弹性件。
在进一步的方案中,所述第一擦拭件包括若干个弧形板与若干个定位块,所述弧形板与定位块一一对应,每个弧形板的断面设置有多个弹簧,所述多个弹簧均环绕一个定位块设置,所述定位块的外壁设置有定滑轮,所述第一擦拭件经过所述第一摄像头的外框或弧形镜面时,所述第一摄像头的外框或弧形镜面压迫所述弧形板沿弹簧长度方向凹陷,且所述定滑轮与所述弧形板的内壁滚动接触。
在进一步的方案中,所述吊钩上设置有第二洗刷组件,所述第二洗刷组件用于洗刷所述第二摄像头的镜面。
在进一步的方案中,所述第二洗刷组件包括第二连接杆与第三连接杆,所述第三连接杆通过第二连接杆与所述吊钩连接,所述第二连接杆的长度大于所述第一摄像头的宽度,所述第三连接杆上设置有第二擦拭件,所述第二擦拭件于所述转动带转动过程中与所述第二摄像头的镜面接触。
在进一步的方案中,所述第二洗刷组件还包括第二储水筒,所述第二储水筒的上连通有第二出水管,所述第二出水管的管口与所述第二擦拭件相对,所述第二储水筒筒内设置有第二活塞,所述第二活塞上设置有用于带动所述第二活塞沿所述第二储水筒筒长度方向移动的第二活塞杆;所述吊钩外壁可转动设置有第二转动杆,所述转动带上设置有第二撞击件,所述第二撞击件于所述转动带转动过程中撞击所述第二转动杆的尾端时,所述第二转动杆的尾端带动所所述第二转动杆转动挤压所述活塞杆沿所述第二储水筒筒长度方向移动,且所述吊钩外壁设置有第二固定板,所述第二固定板上设置有用于驱动所述第二转动杆复位的弹性件。
在进一步的方案中,所述第二擦拭件包括若干个弧形板与若干个定位块,所述弧形板与定位块一一对应,每个弧形板的断面设置有多个弹簧,所述多个弹簧均环绕一个定位块设置,所述定位块的外壁设置有定滑轮,所述第二擦拭件经过所述第一摄像头的外框或弧形镜面时,所述第二摄像头的外框或弧形镜面压迫所述弧形板沿弹簧长度方向凹陷,且所述定滑轮与所述弧形板的内壁滚动接触。
本发明的有益效果是:
通过驱动电机转动带动带动转动带上的第二摄像头转动,直至第二摄像头摄取到建筑物,停止驱动电机的转动,使得第二摄像头与建筑物保持正对,实时监控吊钩与建筑物之间的间距,避免吊机在调取不同待吊物体时无法判断吊钩与建筑物的间距造成吊钩与建筑物碰撞的意外事故。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本发明实施例提供的一种用于解决塔式起重机吊装盲区的监控系统运用于塔吊上的示意图;
图2为图1中A部分的放大图;
图3为图2中B部分的放大图;
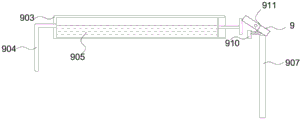
图4为本发明实施例提供的一种用于解决塔式起重机吊装盲区的监控系统运中第二储水筒出水状态下的结构示意图;
图5为本发明实施例提供的一种用于解决塔式起重机吊装盲区的监控系统运中第二擦拭件擦拭第二摄像头时的示意图。
图标:1-吊钩,2-第一摄像头,3-第二摄像头,4-驱动电机,5-第一固定盘,6-第二固定盘,7-转动带,8-转动轴,9-第二洗刷组件,901-第二连接杆,902-第二擦拭件,9021-擦拭布,9022-弧形板,9023-定位块,9024-定滑轮,9025-弹簧,903-第二储水筒,904-第二出水管,905-清洗液,906-第二活塞杆,907-第二转动杆,908-第三连接杆,909-第二撞击件,910-第二固定板,911-弹性件,10-第一洗刷组件,1001-第一连接杆,1002-凸起。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
术语“平行”、“垂直”等并不表示要求部件绝对平行或垂直,而是可以稍微倾斜。如“平行”仅仅是指其方向相对“垂直”而言更加平行,并不是表示该结构一定要完全平行,而是可以稍微倾斜。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1-5,本实施例提供一种用于解决塔式起重机吊装盲区的监控系统,包括吊钩1、第一摄像头2、第二摄像头3和驱动装置。在本方案中,第一摄像头2与第二摄像头3均设置于吊钩1固定连接。第一摄像头2用于监控吊钩1的勾爪与待吊件的方位,第二摄像头3用于监控吊钩1与相邻建筑的方位。且驱动装置与第二摄像头3连接,驱动装置能够驱动第二摄像头3环绕吊钩1转动。
具体的,本方案中还包括第一固定盘5、第二固定盘6和转动带7,吊钩1依次贯穿所述第一固定盘5与第二固定盘6。第一固定盘5和第二固定盘6之间设置有多根转动轴8,每根转动轴8的两端分别与所述第一固定盘5、第二固定盘6连接。且多根转动轴8环绕所述吊钩1设置,转动带7包饶于多根转动轴8的外壁。驱动装置包括驱动电机4,驱动电机4的输出轴上设置有齿轮,齿轮与转动带7贴合,第二摄像头3设置于转动带7的带面,驱动电机4带动转动带7转动时,转动带7带动第二摄像头3转动。
操作室与待吊物体之间经常会隔有建筑物,且吊机在调取不同待吊物体时,建筑物与吊钩1的相对位置在会变动的,仅靠单一的摄像头无法判断吊钩1与建筑物的间距,容易造成吊钩1与建筑物碰撞的意外事故。本方案中通过驱动电机4转动带7动带动转动带7上的第二摄像头3转动,直至第二摄像头3摄取到建筑物,停止驱动电机4的转动,使得第二摄像头3与建筑物保持正对,实时监控吊钩1与建筑物之间的间距,避免吊机在调取不同待吊物体时无法判断吊钩1与建筑物的间距造成吊钩1与建筑物碰撞的意外事故。
在本方案中,第一摄像头2位于第二摄像头3的下方,但是在第二摄像头3不会干涉到第一摄像头2摄取待吊物体的情况下,也可以是第二摄像头3位于第一摄像头2的下方。
同时,由于工地粉尘过大,粉尘容易附着在摄像头的镜片上,而粉尘粘附在摄像头的镜头上就会造成摄取的图像视野不清,导致操作人员在操作过程中极易产生误判。本实施例中的转动带7上还设置有用于洗刷所述第一摄像头2的镜面的第一洗刷组件10。其中第一洗刷组件10包括第一连接杆1001,第一连接杆1001的延伸方向与吊钩1的升降方向相同。第一连接杆1001的尾端设置于转动带7上,第一连接杆1001的头端朝吊钩1方向设置有凸起1002,凸起1002上设置有第一擦拭件,第一擦拭件于转动带7转动过程中与所述第一摄像头2的镜面接触。
本本方案中,第一擦拭件包括擦拭布9021,但是直接使用擦拭布9021擦拭镜片,难以直接将灰尘擦拭干净。在进一步的方案中,第一洗刷组件10还包括第一储水筒,第一储水筒中存储有清洗液905,第一储水筒设置于吊钩1的外壁。第一储水筒的上连通有第一出水管,第一出水管的管口与所述第一擦拭件相对。第一储水筒筒内设置有第一活塞,第一活塞上设置有用于带动活塞沿所述第一储水筒长度方向移动的第一活塞杆。吊钩1外壁可转动设置有第一转动杆,且转动带7上设置有第一撞击件,第一撞击件于转动带7转动过程中撞击第一转动杆的尾端。第一转动杆的尾端带动第一转动杆转动挤压第一活塞杆,第一活塞杆推动第一活塞沿第一储水筒筒长度方向移动,迫使第一储水筒内的清洗液905被挤压由第一出水管排出流出第一擦拭件。在第二摄像头3转动摄取建筑物时,通过在第一擦拭件上流出清洗液905,便于第一擦拭件擦拭镜片。且只有第一撞击件于转动带7转动过程中撞击第一转动杆的尾端时,才会推动活塞,使得第一储水筒只有在摄像头转动,也就是驱动要调取待吊物体时,才会出水便于擦洗,避免了清洗液905的浪费。
吊钩1外壁还设置有第一固定板,第一固定板上设置有用于驱动第一转动杆复位的弹性件911。具体的,本方案中的弹性件911为弹簧9025。通过弹簧9025驱动第一转动杆复位,避免清洗液905一直流出导致清洗液905的浪费。
另外的,如图4所示,吊钩1上还设置有用于洗刷所述第二摄像头3的镜面第二洗刷组件9。作为一种具体的实施方式,第二洗刷组件9包括第二连接杆901与第三连接杆908,所述第三连接杆908通过第二连接杆901与所述吊钩1连接,为了避免第三连接杆908与第一摄像头2干涉,第二连接杆901的长度大于一摄像头的宽度。且第三连接杆908上设置有第三擦拭件,第三擦拭件于所述转动带7转动过程中与第二摄像头3的镜面接触。通过擦拭第二摄像头3避免而粉尘粘附在摄像头的镜头上就会造成摄取的图像视野不清,导致操作人员在操作过程中极易产生误判。
且与第一洗刷组件10同理,第二洗刷组件9还包括第二储水筒903,第二储水筒903中存储有清洗液905,第二储水筒903的上连通有第二出水管904,第二出水管904的管口与所述第二擦拭件902相对。第二储水筒903筒内设置有第二活塞,第二活塞上设置有用于带动所述第二活塞沿所述第二储水筒903筒长度方向移动的第二活塞杆906。同时吊钩1外壁可转动设置有第二转动杆907,转动带7上设置有第二撞击件909。当第二撞击件909于所述转动带7转动过程中撞击第二转动杆907的尾端时,第二转动杆907的尾端带动第二转动杆907转动挤压活塞杆沿第二储水筒903筒长度方向移动,迫使第二储水筒903内的清洗液905被挤压由第二出水管904排出流出第二擦拭件902。且吊钩1外壁设置有第二固定板910,第二固定板910上设置有用于驱动所述第二转动杆907复位的弹性件911。
在进一步的方案中,如图5所示,第一擦拭件与第二擦拭件902均包括若干个弧形板9022与若干个定位块9023,擦拭布9021与若干个弧形板9022的板面贴合。弧形板9022与定位块9023一一对应,且每个弧形板9022的断面设置有多个弹簧9025,多个弹簧9025均环绕对应的定位块9023设置。当擦拭布9021经过第一摄像头2的外框或弧形镜面时,第一摄像头2的外框或弧形镜面压迫弧形板9022沿弹簧9025长度方向凹陷。容易理解的,现有的摄像头外经常带有护框,或摄像头为半球形,直接使用擦拭布9021扫过摄像头时,可能会出现擦拭布9021只能擦拭到护框无法擦拭到镜头的问题。且摄像头为半球形时,也会出现无法擦拭镜头的周侧的问题。而通过每个弧形板9022的断面设置有多个弹簧9025,多个弹簧9025均环绕对应的定位块9023设置,在擦拭布9021经过第一摄像头2的外框或弧形镜面时,第一摄像头2的外框或弧形镜面压迫弧形板9022沿弹簧9025长度方向凹陷。使得摄像头外带有护框时,护框内的弧形板9022弹出,带动擦拭布9021擦拭镜头。当摄像头为半球形,板面随着摄像头的形状凹陷变化,使得擦拭布9021可以完整擦拭整个摄像头的镜头。
同时,定位块9023的外壁设置有定滑轮9024,定滑轮9024与所述弧形板9022的内壁滚动接触。在第一摄像头2的外框或弧形镜面压迫弧形板9022沿弹簧9025长度方向凹陷时,弧形板9022会给定位板的侧壁一个作用力,通过定滑轮9024与弧形板9022的内壁滚动接触,避免出现弧形板9022难以沿弹簧9025长度方向凹陷的问题。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (6)
1.一种用于解决塔式起重机吊装盲区的监控系统,其特征在于,包括吊钩、第一摄像头、第二摄像头和驱动装置,所述第一摄像头与所述吊钩固定连接,所述第一摄像头用于监控所述吊钩的勾爪与待吊件的方位;所述第二摄像头设置于所述吊钩外壁,所述第二摄像头用于监控吊钩与相邻建筑的方位;所述驱动装置与所述第二摄像头连接,且所述驱动装置能够驱动所述第二摄像头环绕所述吊钩转动;
所述监控系统还包括第一固定盘、第二固定盘和转动带,所述吊钩依次贯穿所述第一固定盘与第二固定盘,所述第一固定盘和第二固定盘之间设置有多根转动轴,每根转动轴的两端分别与所述第一固定盘、第二固定盘连接,所述多根转动轴环绕所述吊钩设置,所述转动带包饶于所述多根转动轴的外壁,所述驱动装置包括驱动电机,所述驱动电机设置于所述吊钩的外壁,所述驱动电机的输出轴上设置有齿轮,所述齿轮与所述转动带贴合,所述第二摄像头设置于所述转动带的带面,所述驱动电机带动所述转动带转动时,所述转动带带动所述第二摄像头转动;所述转动带上设置有第一洗刷组件,所述第一洗刷组件用于洗刷所述第一摄像头的镜面;所述第一洗刷组件包括第一连接杆,所述第一连接杆设置于所述转动带,所述第一连接杆的长度方向与所述吊钩的升降方向相同,所述第一连接杆上朝吊钩方向设置有凸起,所述凸起上设置有第一擦拭件,所述第一擦拭件于所述转动带转动过程中与所述第一摄像头的镜面接触;
所述第一洗刷组件还包括第一储水筒,所述第一储水筒内存储有清洗液,所述第一储水筒的上连通有第一出水管,所述第一出水管的管口与所述第一擦拭件相对,所述第一储水筒筒内设置有第一活塞,所述第一活塞上设置有用于带动所述活塞沿所述第一储水筒筒长度方向移动的第一活塞杆;所述吊钩外壁可转动设置有第一转动杆,所述转动带上设置有第一撞击件,所述第一撞击件于所述转动带转动过程中撞击所述第一转动杆的尾端时,所述第一转动杆的尾端带动所述第一转动杆转动挤压所述第一活塞杆,所述第一活塞杆推动第一活塞沿所述第一储水筒筒长度方向移动,且所述吊钩外壁设置有第一固定板,所述第一固定板上设置有用于驱动所述第一转动杆复位的弹性件。
2.根据权利要求1所述的用于解决塔式起重机吊装盲区的监控系统,其特征在于,所述第一擦拭件包括擦拭布、若干个弧形板与若干个定位块,所述擦拭布与所述若干个弧形板的板面贴合,所述弧形板与定位块一一对应,每个弧形板的断面设置有多个弹簧,所述多个弹簧均环绕一个定位块设置,所述定位块的外壁设置有定滑轮,所述第一擦拭件经过所述第一摄像头的外框或弧形镜面时,所述第一摄像头的外框或弧形镜面压迫所述弧形板沿弹簧长度方向凹陷,且所述定滑轮与所述弧形板的内壁滚动接触。
3.根据权利要求1所述的用于解决塔式起重机吊装盲区的监控系统,其特征在于,所述吊钩上设置有第二洗刷组件,所述第二洗刷组件用于洗刷所述第二摄像头的镜面。
4.根据权利要求3所述的用于解决塔式起重机吊装盲区的监控系统,其特征在于,所述第二洗刷组件包括第二连接杆与第三连接杆,所述第三连接杆通过第二连接杆与所述吊钩连接,所述第三连接杆上设置有第二擦拭件,所述第二擦拭件于所述转动带转动过程中与所述第二摄像头的镜面接触。
5.根据权利要求4所述的用于解决塔式起重机吊装盲区的监控系统,其特征在于,所述第二洗刷组件还包括第二储水筒,所述第二储水筒的上连通有第二出水管,所述第二出水管的管口与所述第二擦拭件相对,所述第二储水筒筒内设置有第二活塞,所述第二活塞上设置有用于带动所述第二活塞沿所述第二储水筒筒长度方向移动的第二活塞杆;所述吊钩外壁可转动设置有第二转动杆,所述转动带上设置有第二撞击件,所述第二撞击件于所述转动带转动过程中撞击所述第二转动杆的尾端时,所述第二转动杆的尾端带动所所述第二转动杆转动挤压所述活塞杆沿所述第二储水筒筒长度方向移动,且所述吊钩外壁设置有第二固定板,所述第二固定板上设置有用于驱动所述第二转动杆复位的弹性件。
6.根据权利要求4所述的用于解决塔式起重机吊装盲区的监控系统,其特征在于,所述第二擦拭件包括擦拭布、若干个弧形板与若干个定位块,所述擦拭布与所述若干个弧形板的板面贴合,所述弧形板与定位块一一对应,每个弧形板的断面设置有多个弹簧,所述多个弹簧均环绕一个定位块设置,所述定位块的外壁设置有定滑轮,所述第二擦拭件经过所述第一摄像头的外框或弧形镜面时,所述第二摄像头的外框或弧形镜面压迫所述弧形板沿弹簧长度方向凹陷,且所述定滑轮与所述弧形板的内壁滚动接触。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911158393.8A CN110844811B (zh) | 2019-11-22 | 2019-11-22 | 一种用于解决塔式起重机吊装盲区的监控系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201911158393.8A CN110844811B (zh) | 2019-11-22 | 2019-11-22 | 一种用于解决塔式起重机吊装盲区的监控系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110844811A CN110844811A (zh) | 2020-02-28 |
| CN110844811B true CN110844811B (zh) | 2020-11-10 |
Family
ID=69603892
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201911158393.8A Active CN110844811B (zh) | 2019-11-22 | 2019-11-22 | 一种用于解决塔式起重机吊装盲区的监控系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110844811B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112437228B (zh) * | 2020-10-27 | 2021-11-23 | 北京中铁建建筑科技有限公司 | 一种基于uwb跟随技术的塔吊吊钩可视化方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20010044401A (ko) * | 2001-02-16 | 2001-06-05 | 김종선 | 타워 크레인의 무선 영상감시장치 |
| CN205772909U (zh) * | 2016-05-27 | 2016-12-07 | 天津市林通起重设备有限公司 | 一种用于起重机的吊头摄像装置 |
| CN206751196U (zh) * | 2017-05-24 | 2017-12-15 | 刘国彬 | 一种起重机吊钩 |
| CN207658972U (zh) * | 2017-12-03 | 2018-07-27 | 陈燕权 | 一种具有可视功能的吊机 |
| CN109835816A (zh) * | 2019-02-28 | 2019-06-04 | 广州市加简派电子科技有限公司 | 一种用于建筑施工的精确度高的吊装设备 |
| CN209098069U (zh) * | 2018-10-08 | 2019-07-12 | 广东珠江工程总承包有限公司 | 一种塔吊安全报警装置 |
-
2019
- 2019-11-22 CN CN201911158393.8A patent/CN110844811B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20010044401A (ko) * | 2001-02-16 | 2001-06-05 | 김종선 | 타워 크레인의 무선 영상감시장치 |
| CN205772909U (zh) * | 2016-05-27 | 2016-12-07 | 天津市林通起重设备有限公司 | 一种用于起重机的吊头摄像装置 |
| CN206751196U (zh) * | 2017-05-24 | 2017-12-15 | 刘国彬 | 一种起重机吊钩 |
| CN207658972U (zh) * | 2017-12-03 | 2018-07-27 | 陈燕权 | 一种具有可视功能的吊机 |
| CN209098069U (zh) * | 2018-10-08 | 2019-07-12 | 广东珠江工程总承包有限公司 | 一种塔吊安全报警装置 |
| CN109835816A (zh) * | 2019-02-28 | 2019-06-04 | 广州市加简派电子科技有限公司 | 一种用于建筑施工的精确度高的吊装设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110844811A (zh) | 2020-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110844811B (zh) | 一种用于解决塔式起重机吊装盲区的监控系统 | |
| CN107547786B (zh) | 一种基于物联网的带自清洁功能的监控摄像头 | |
| CN209220110U (zh) | 一种四轮悬挂式高空外墙防风玻璃清洁机器人 | |
| CN211860281U (zh) | 一种网络控制高清监控摄像头 | |
| CN111871980A (zh) | 一种垂直管道清洗设备 | |
| CN114589129A (zh) | 一种高安全性光学镜头防护设备 | |
| CN115695983A (zh) | 一种带有防护罩的监控摄像头 | |
| CN115230897A (zh) | 一种船舶维护用船底藻类清理装置 | |
| CN217649238U (zh) | 轮胎检测系统 | |
| CN110816769B (zh) | 一种船用打扫机器人 | |
| CN217892411U (zh) | 轮胎检测系统 | |
| CN219214951U (zh) | 一种汽车摄像头用清洁装置 | |
| CN207059901U (zh) | 一种汽车用带雨刷式除尘减震倒车镜 | |
| KR100858279B1 (ko) | 선체내부 도장작업용 도료호스 자동 공급 및 회수장치와 그 제어방법 | |
| CN217923298U (zh) | 一种扫地机用同步升降机构 | |
| CN216520602U (zh) | 一种建筑工程工地施工用监控装置 | |
| CN215558145U (zh) | 一种适用于无接触电梯的智能电梯控制装置 | |
| CN215201319U (zh) | 钢筋除锈装置 | |
| CN107198489B (zh) | 一种适用于高层建筑的自动化玻璃清洗装置及其使用方法 | |
| CN214953709U (zh) | 一种基于物联网的违规用电行为监测系统 | |
| JPH05278571A (ja) | 車外バックミラーのワイパー装置 | |
| CN113787971B (zh) | 一种基于神经网络技术的危险驾驶预警装置 | |
| CN210187803U (zh) | 一种地铁工地监控装置的除灰结构 | |
| CN216020760U (zh) | 一种擦窗机子母吊船 | |
| CN217643451U (zh) | 一种具有散热功能的安防摄像头 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |