CN110754999A - 一种室内清洁机器人及工作原理 - Google Patents
一种室内清洁机器人及工作原理 Download PDFInfo
- Publication number
- CN110754999A CN110754999A CN201910800925.7A CN201910800925A CN110754999A CN 110754999 A CN110754999 A CN 110754999A CN 201910800925 A CN201910800925 A CN 201910800925A CN 110754999 A CN110754999 A CN 110754999A
- Authority
- CN
- China
- Prior art keywords
- pipe
- fixedly connected
- inner cavity
- box body
- drives
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4038—Disk shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4088—Supply pumps; Spraying devices; Supply conduits
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4094—Accessories to be used in combination with conventional vacuum-cleaning devices
Abstract
本发明公开了一种室内清洁机器人及工作原理,包括箱体,所述箱体的内腔固定连接有水箱,所述水箱内腔的底部固定连接有密封罩,所述密封罩的顶部固定连接有水泵,所述水泵的进水管与密封罩的顶部连通,所述水箱的底部连通有竖管,所述竖管的内部设置有移动管,所述移动管的底部贯穿箱体内腔的底部并延伸至箱体的外部,所述移动管的底部连通有转盘。本发明具备对地面进行清扫、洗刷和吸尘,清洁效果好,移动灵活性高的优点,解决了现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人适用性的问题。
Description
技术领域
本发明涉及机器人技术领域,具体为一种室内清洁机器人及工作原理。
背景技术
机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作,传统的清洁机器人在中国大陆最近几年也以每年倍增的速度在普及,但传统的清洁机器人只是属于家用电器类别,真正的智能化无从谈起,清洁机器人是为人类服务的特种机器人,主要从事家庭卫生的清洁、清洗等工作。
现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人的适用性,为此我们提供了一种室内清洁机器人及工作原理。
发明内容
本发明的目的在于提供一种室内清洁机器人及工作原理,具备对地面进行清扫、洗刷和吸尘,清洁效果好,移动灵活性高的优点,解决了现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人适用性的问题。
为实现上述目的,本发明提供如下技术方案:一种室内清洁机器人,包括箱体,所述箱体的内腔固定连接有水箱,所述水箱内腔的底部固定连接有密封罩,所述密封罩的顶部固定连接有水泵,所述水泵的进水管与密封罩的顶部连通,所述水箱的底部连通有竖管,所述竖管的内部设置有移动管,所述移动管的底部贯穿箱体内腔的底部并延伸至箱体的外部,所述移动管的底部连通有转盘,所述转盘的底部开设有漏水孔,所述转盘的底部固定连接有刷毛,所述移动管的表面套设有轴承套,所述轴承套通过轴承与移动管活动连接,所述轴承套相对的一侧固定连接有移动板,所述移动板的顶部固定连接有电动伸缩杆,所述电动伸缩杆的底部贯穿至箱体的内腔并与箱体固定连接,所述竖管的表面固定套设有蜗轮,所述箱体底部的右侧固定连接有第一电机,所述第一电机转轴的左端固定连接有蜗杆,所述蜗杆的左端与箱体内腔的左侧活动连接,所述蜗杆与蜗轮的背面啮合,所述水箱的底部通过支架固定连接有双轴电机,所述双轴电机的转轴固定连接有横杆,所述横杆远离双轴电机转轴的一端贯穿至箱体的外部,所述横杆位于箱体外部的一端固定连接有第一齿轮,所述箱体两侧的底部均活动连接有转杆,所述转杆远离箱体的一端固定连接有滚轮,所述转杆的表面套设有第二齿轮,所述第一齿轮与第二齿轮啮合,所述箱体内腔的底部固定连接有固定板,所述固定板的顶部固定连接有第二电机,所述第二电机转轴的底部贯穿固定板并固定连接有滚轮座,所述滚轮座的底部通过转轴活动连接有转向轮,所述箱体内腔的顶部固定连接有漏斗罩,所述漏斗罩的内腔通过支架固定连接有风机,所述漏斗罩的底部连通有短管,所述短管的底部套设有过滤盖,所述箱体的顶部连通有出气管,所述箱体的正面连通有吸尘管,所述吸尘管远离箱体的一端连通有吸尘罩,所述箱体右侧的顶部通过铰链活动连接有箱门,所述吸尘管的正面固定连接有避障传感器,所述箱体正面的顶部固定连接有控制器,所述箱体顶部的左侧固定连接有信号收发器,所述信号收发器与控制器双向电连接,所述避障传感器的输出端与控制器输入端电连接,所述控制器分别与第一电机、第二电机、双轴电机、电动伸缩杆和风机电连接。
优选的,所述轴承套与移动管之间设置有密封轴承,密封轴承套设在移动管的表面,密封轴承的内环与移动管固定连接,密封轴承的外环与轴承套固定连接。
优选的,所述竖管内腔的两侧均开设有滑槽,所述移动管两侧的顶部均固定连接有滑块,所述滑块远离移动管的一侧延伸至滑槽的内腔,所述滑块与滑槽滑动连接。
优选的,所述竖管与移动管的连接处设置有密封套,所述密封套套设在移动管的表面,所述密封套与竖管固定连接。
优选的,所述第一齿轮的表面固定连接有第一齿牙,所述第二齿轮的表面固定连接有与第一齿牙相适配的第二齿牙,所述第二齿轮与转杆固定连接。
优选的,所述水箱右侧的顶部连通有加水管,所述加水管远离水箱的一端贯穿箱体并延伸至箱体的外部,所述加水管的顶部套设有管盖,所述加水管与管盖螺纹连接。
优选的,所述箱体右侧的底部开设有观察孔,所述水箱的右侧固定连接有液位窗,所述液位窗的表面喷涂有刻度线。
优选的,一种室内清洁机器人及工作原理,包括以下步骤:
A:打开管盖,通过加水管向水箱的内腔添加水源,控制器控制风机运行,使漏斗罩内腔的气流向上流动,通过吸尘罩将地面的灰尘吸进吸尘管的内腔,通过吸尘管进入箱体的内腔;
B:控制器控制电动伸缩杆伸长带动移动板向下移动,移动板带动轴承套向下移动,轴承套带动移动管向下移动,移动管带动转盘和刷毛向下一定量,使刷毛与地面接触,控制器控制第一电机的转轴带动蜗杆旋转,蜗杆带动蜗轮旋转,蜗轮带动竖管旋转,竖管通过滑槽带动滑块旋转,滑块带动移动管旋转,移动管带动转盘和刷毛旋转,对地面进行清扫;
C:控制器控制水泵运行,将水箱内腔的水输送进密封罩的内腔,使密封罩内腔压力增大,密封罩内腔的水依次经过竖管和移动管进入转盘的内腔,转盘内腔的水通过漏水孔流至地面,使地面湿润,能够更好的对地面进行洗刷;
D:控制器控制双轴电机的转轴带动横杆旋转,横杆带动第一齿轮旋转,第一齿轮带动第二齿轮旋转,第二齿轮带动转杆旋转,转杆带动滚轮旋转,使清洁机器人移动,对地面不用的位置进行清扫;
E:清洁机器人移动过程中遇到障碍物时,避障传感器检测到吸尘管前方有障碍物,将信息反馈给控制器,控制器控制第二电机的转轴带动滚轮座旋转,滚轮座带动转向轮旋转,使移动机器人转向避开障碍物。
与现有技术相比,本发明的有益效果如下:
1、本发明通过箱体、水箱、密封罩、水泵、竖管、移动管、转盘、漏水孔、刷毛、轴承套、移动板、电动伸缩杆、蜗轮、第一电机、蜗杆、双轴电机、横杆、第一齿轮、转杆、滚轮、第二齿轮、固定板、第二电机、滚轮座、转向轮、漏斗罩、风机、短管、过滤盖、出气管、吸尘管和吸尘罩进行配合,具备对地面进行清扫、洗刷和吸尘,清洁效果好,移动灵活性高的优点,解决了现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人适用性的问题。
2、本发明通过设置轴承套,能够对移动管进行支撑,便于移动管的旋转,通过设置固定板、第二电机、滚轮座和转向轮,能够对箱体进行支撑,便于机器人移动时转向,通过设置过滤盖,能够避免箱体内腔的灰尘进入漏斗罩的内腔对风机造成腐蚀,能对风机进行保护,通过设置出气管,便于箱体内腔顶部进行排气,便于气流的流通,通过设置箱门,便于对箱体内腔的灰尘进行清理,通过设置信号收发器,便于接收外部发出的指令,实现对机器人的无线遥控,通过设置滑槽和滑块,能够对移动管进行平衡支撑,便于移动管的竖向移动,通过设置密封套,增强了移动管与竖管之间的密封性,避免移动管用于竖管之间漏水,通过设置加水管,便于向水箱内腔添加水源,通过设置观察孔和液位窗,便于观察水箱水液位的高度。
附图说明
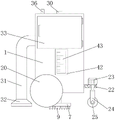
图1为本发明结构示意图;
图2为本发明竖管和移动管连接剖视示意图;
图3为本发明结构右视示意图;
图4为本发明结构正视示意图;
图5为本发明固定板和第二电机连接右视示意图;
图6为本发明系统原理图。
图中:1箱体、2水箱、3密封罩、4水泵、5竖管、6移动管、7转盘、8 漏水孔、9刷毛、10轴承套、11移动板、12电动伸缩杆、13蜗轮、14第一电机、15蜗杆、16双轴电机、17横杆、18第一齿轮、19转杆、20滚轮、21 第二齿轮、22固定板、23第二电机、24滚轮座、25转向轮、26漏斗罩、27 风机、28短管、29过滤盖、30出气管、31吸尘管、32吸尘罩、33箱门、34 避障传感器、35控制器、36信号收发器、37滑槽、38滑块、39密封套、40 加水管、41管盖、42观察孔、43液位窗。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明的箱体1、水箱2、密封罩3、水泵4、竖管5、移动管6、转盘7、漏水孔8、刷毛9、轴承套10、移动板11、电动伸缩杆12、蜗轮13、第一电机14、蜗杆15、双轴电机16、横杆17、第一齿轮18、转杆19、滚轮20、第二齿轮21、固定板22、第二电机23、滚轮座24、转向轮25、漏斗罩26、风机27、短管28、过滤盖29、出气管30、吸尘管31、吸尘罩32、箱门33、避障传感器34、控制器35、信号收发器36、滑槽37、滑块38、密封套39、加水管40、管盖41、观察孔42和液位窗43部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
请参阅图1-6,一种室内清洁机器人,包括箱体1,箱体1的内腔固定连接有水箱2,水箱2内腔的底部固定连接有密封罩3,密封罩3的顶部固定连接有水泵4,水泵4的进水管与密封罩3的顶部连通,水箱2的底部连通有竖管5,竖管5的内部设置有移动管6,移动管6的底部贯穿箱体1内腔的底部并延伸至箱体1的外部,移动管6的底部连通有转盘7,转盘7的底部开设有漏水孔8,转盘7的底部固定连接有刷毛9,移动管6的表面套设有轴承套10,轴承套10通过轴承与移动管6活动连接,轴承套10与移动管6之间设置有密封轴承,密封轴承套设在移动管6的表面,密封轴承的内环与移动管6固定连接,密封轴承的外环与轴承套10固定连接,设置轴承套10,能够对移动管6进行支撑,便于移动管6的旋转,竖管5内腔的两侧均开设有滑槽37,移动管6两侧的顶部均固定连接有滑块38,滑块38远离移动管6的一侧延伸至滑槽37的内腔,滑块38与滑槽37滑动连接,竖管5与移动管6的连接处设置有密封套39,密封套39套设在移动管6的表面,密封套39与竖管5固定连接,通过设置滑槽37和滑块38,能够对移动管6进行平衡支撑,便于移动管6的竖向移动,通过设置密封套39,增强了移动管6与竖管5之间的密封性,避免移动管6用于竖管5之间漏水,轴承套10相对的一侧固定连接有移动板11,移动板11的顶部固定连接有电动伸缩杆12,电动伸缩杆12的底部贯穿至箱体1的内腔并与箱体1固定连接,竖管5的表面固定套设有蜗轮 13,箱体1底部的右侧固定连接有第一电机14,第一电机14转轴的左端固定连接有蜗杆15,蜗杆15的左端与箱体1内腔的左侧活动连接,蜗杆15与蜗轮13的背面啮合,水箱2的底部通过支架固定连接有双轴电机16,双轴电机16的转轴固定连接有横杆17,横杆17远离双轴电机16转轴的一端贯穿至箱体1的外部,横杆17位于箱体1外部的一端固定连接有第一齿轮18,箱体1 两侧的底部均活动连接有转杆19,转杆19远离箱体1的一端固定连接有滚轮 20,转杆19的表面套设有第二齿轮21,第一齿轮18与第二齿轮21啮合,第一齿轮18的表面固定连接有第一齿牙,第二齿轮21的表面固定连接有与第一齿牙相适配的第二齿牙,第二齿轮21与转杆19固定连接,箱体1内腔的底部固定连接有固定板22,固定板22的顶部固定连接有第二电机23,第二电机23转轴的底部贯穿固定板22并固定连接有滚轮座24,滚轮座24的底部通过转轴活动连接有转向轮25,通过设置固定板22、第二电机23、滚轮座 24和转向轮25,能够对箱体1进行支撑,便于机器人移动时转向,箱体1内腔的顶部固定连接有漏斗罩26,漏斗罩26的内腔通过支架固定连接有风机27,通过设置过滤盖29,能够避免箱体1内腔的灰尘进入漏斗罩26的内腔对风机27造成腐蚀,能对风机27进行保护,漏斗罩26的底部连通有短管28,短管28的底部套设有过滤盖29,箱体1的顶部连通有出气管30,通过设置出气管30,便于箱体1内腔顶部进行排气,便于气流的流通,箱体1的正面连通有吸尘管31,吸尘管31远离箱体1的一端连通有吸尘罩32,箱体1右侧的顶部通过铰链活动连接有箱门33,通过设置箱门33,便于对箱体1内腔的灰尘进行清理,吸尘管31的正面固定连接有避障传感器34,箱体1正面的顶部固定连接有控制器35,箱体1顶部的左侧固定连接有信号收发器36,信号收发器36与控制器35双向电连接,避障传感器34的输出端与控制器35 输入端电连接,控制器35分别与第一电机14、第二电机23、双轴电机16、电动伸缩杆12和风机27电连接,通过设置信号收发器36,便于接收外部发出的指令,实现对机器人的无线遥控,水箱2右侧的顶部连通有加水管40,加水管40远离水箱2的一端贯穿箱体1并延伸至箱体1的外部,加水管40 的顶部套设有管盖41,加水管40与管盖41螺纹连接,箱体1右侧的底部开设有观察孔42,水箱2的右侧固定连接有液位窗43,液位窗43的表面喷涂有刻度线,通过设置加水管40,便于向水箱2内腔添加水源,通过设置观察孔42和液位窗43,便于观察水箱2水液位的高度,通过箱体1、水箱2、密封罩3、水泵4、竖管5、移动管6、转盘7、漏水孔8、刷毛9、轴承套10、移动板11、电动伸缩杆12、蜗轮13、第一电机14、蜗杆15、双轴电机16、横杆17、第一齿轮18、转杆19、滚轮20、第二齿轮21、固定板22、第二电机23、滚轮座24、转向轮25、漏斗罩26、风机27、短管28、过滤盖29、出气管30、吸尘管31和吸尘罩32进行配合,具备对地面进行清扫、洗刷和吸尘,清洁效果好,移动灵活性高的优点,解决了现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人适用性的问题。
一种室内清洁机器人及工作原理,包括以下步骤:
A:打开管盖41,通过加水管40向水箱2的内腔添加水源,控制器35控制风机27运行,使漏斗罩26内腔的气流向上流动,通过吸尘罩32将地面的灰尘吸进吸尘管31的内腔,通过吸尘管31进入箱体1的内腔;
B:控制器35控制电动伸缩杆12伸长带动移动板11向下移动,移动板 11带动轴承套10向下移动,轴承套10带动移动管6向下移动,移动管6带动转盘7和刷毛9向下一定量,使刷毛9与地面接触,控制器35控制第一电机14的转轴带动蜗杆15旋转,蜗杆15带动蜗轮13旋转,蜗轮13带动竖管 5旋转,竖管5通过滑槽37带动滑块38旋转,滑块38带动移动管6旋转,移动管6带动转盘7和刷毛9旋转,对地面进行清扫;
C:控制器35控制水泵4运行,将水箱2内腔的水输送进密封罩3的内腔,使密封罩3内腔压力增大,密封罩3内腔的水依次经过竖管5和移动管6 进入转盘7的内腔,转盘7内腔的水通过漏水孔8流至地面,使地面湿润,能够更好的对地面进行洗刷;
D:控制器35控制双轴电机16的转轴带动横杆17旋转,横杆17带动第一齿轮18旋转,第一齿轮18带动第二齿轮21旋转,第二齿轮21带动转杆 19旋转,转杆19带动滚轮20旋转,使清洁机器人移动,对地面不用的位置进行清扫;
E:清洁机器人移动过程中遇到障碍物时,避障传感器34检测到吸尘管 31前方有障碍物,将信息反馈给控制器35,控制器35控制第二电机23的转轴带动滚轮座24旋转,滚轮座24带动转向轮25旋转,使移动机器人转向避开障碍物。
综上所述:该室内清洁机器人及工作原理,通过箱体1、水箱2、密封罩 3、水泵4、竖管5、移动管6、转盘7、漏水孔8、刷毛9、轴承套10、移动板11、电动伸缩杆12、蜗轮13、第一电机14、蜗杆15、双轴电机16、横杆 17、第一齿轮18、转杆19、滚轮20、第二齿轮21、固定板22、第二电机23、滚轮座24、转向轮25、漏斗罩26、风机27、短管28、过滤盖29、出气管30、吸尘管31和吸尘罩32进行配合,解决了现有的室内清洁机器人功能较为单一,大都只具有单一的吸尘功能,不能够对地面进行清扫和洗刷,使得地面清洁不干净,同时移动的灵活性较差,降低了清洁机器人适用性的问题。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (8)
1.一种室内清洁机器人,包括箱体(1),其特征在于:所述箱体(1)的内腔固定连接有水箱(2),所述水箱(2)内腔的底部固定连接有密封罩(3),所述密封罩(3)的顶部固定连接有水泵(4),所述水泵(4)的进水管与密封罩(3)的顶部连通,所述水箱(2)的底部连通有竖管(5),所述竖管(5)的内部设置有移动管(6),所述移动管(6)的底部贯穿箱体(1)内腔的底部并延伸至箱体(1)的外部,所述移动管(6)的底部连通有转盘(7),所述转盘(7)的底部开设有漏水孔(8),所述转盘(7)的底部固定连接有刷毛(9),所述移动管(6)的表面套设有轴承套(10),所述轴承套(10)通过轴承与移动管(6)活动连接,所述轴承套(10)相对的一侧固定连接有移动板(11),所述移动板(11)的顶部固定连接有电动伸缩杆(12),所述电动伸缩杆(12)的底部贯穿至箱体(1)的内腔并与箱体(1)固定连接,所述竖管(5)的表面固定套设有蜗轮(13),所述箱体(1)底部的右侧固定连接有第一电机(14),所述第一电机(14)转轴的左端固定连接有蜗杆(15),所述蜗杆(15)的左端与箱体(1)内腔的左侧活动连接,所述蜗杆(15)与蜗轮(13)的背面啮合,所述水箱(2)的底部通过支架固定连接有双轴电机(16),所述双轴电机(16)的转轴固定连接有横杆(17),所述横杆(17)远离双轴电机(16)转轴的一端贯穿至箱体(1)的外部,所述横杆(17)位于箱体(1)外部的一端固定连接有第一齿轮(18),所述箱体(1)两侧的底部均活动连接有转杆(19),所述转杆(19)远离箱体(1)的一端固定连接有滚轮(20),所述转杆(19)的表面套设有第二齿轮(21),所述第一齿轮(18)与第二齿轮(21)啮合,所述箱体(1)内腔的底部固定连接有固定板(22),所述固定板(22)的顶部固定连接有第二电机(23),所述第二电机(23)转轴的底部贯穿固定板(22)并固定连接有滚轮座(24),所述滚轮座(24)的底部通过转轴活动连接有转向轮(25),所述箱体(1)内腔的顶部固定连接有漏斗罩(26),所述漏斗罩(26)的内腔通过支架固定连接有风机(27),所述漏斗罩(26)的底部连通有短管(28),所述短管(28)的底部套设有过滤盖(29),所述箱体(1)的顶部连通有出气管(30),所述箱体(1)的正面连通有吸尘管(31),所述吸尘管(31)远离箱体(1)的一端连通有吸尘罩(32),所述箱体(1)右侧的顶部通过铰链活动连接有箱门(33),所述吸尘管(31)的正面固定连接有避障传感器(34),所述箱体(1)正面的顶部固定连接有控制器(35),所述箱体(1)顶部的左侧固定连接有信号收发器(36),所述信号收发器(36)与控制器(35)双向电连接,所述避障传感器(34)的输出端与控制器(35)输入端电连接,所述控制器(35)分别与第一电机(14)、第二电机(23)、双轴电机(16)、电动伸缩杆(12)和风机(27)电连接。
2.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述轴承套(10)与移动管(6)之间设置有密封轴承,密封轴承套设在移动管(6)的表面,密封轴承的内环与移动管(6)固定连接,密封轴承的外环与轴承套(10)固定连接。
3.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述竖管(5)内腔的两侧均开设有滑槽(37),所述移动管(6)两侧的顶部均固定连接有滑块(38),所述滑块(38)远离移动管(6)的一侧延伸至滑槽(37)的内腔,所述滑块(38)与滑槽(37)滑动连接。
4.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述竖管(5)与移动管(6)的连接处设置有密封套(39),所述密封套(39)套设在移动管(6)的表面,所述密封套(39)与竖管(5)固定连接。
5.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述第一齿轮(18)的表面固定连接有第一齿牙,所述第二齿轮(21)的表面固定连接有与第一齿牙相适配的第二齿牙,所述第二齿轮(21)与转杆(19)固定连接。
6.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述水箱(2)右侧的顶部连通有加水管(40),所述加水管(40)远离水箱(2)的一端贯穿箱体(1)并延伸至箱体(1)的外部,所述加水管(40)的顶部套设有管盖(41),所述加水管(40)与管盖(41)螺纹连接。
7.根据权利要求1所述的一种室内清洁机器人,其特征在于:所述箱体(1)右侧的底部开设有观察孔(42),所述水箱(2)的右侧固定连接有液位窗(43),所述液位窗(43)的表面喷涂有刻度线。
8.根据权利要求1-8所述的一种室内清洁机器人及工作原理,其特征在于包括以下步骤:
A:打开管盖(41),通过加水管(40)向水箱(2)的内腔添加水源,控制器(35)控制风机(27)运行,使漏斗罩(26)内腔的气流向上流动,通过吸尘罩(32)将地面的灰尘吸进吸尘管(31)的内腔,通过吸尘管(31)进入箱体(1)的内腔;
B:控制器(35)控制电动伸缩杆(12)伸长带动移动板(11)向下移动,移动板(11)带动轴承套(10)向下移动,轴承套(10)带动移动管(6)向下移动,移动管(6)带动转盘(7)和刷毛(9)向下一定量,使刷毛(9)与地面接触,控制器(35)控制第一电机(14)的转轴带动蜗杆(15)旋转,蜗杆(15)带动蜗轮(13)旋转,蜗轮(13)带动竖管(5)旋转,竖管(5)通过滑槽(37)带动滑块(38)旋转,滑块(38)带动移动管(6)旋转,移动管(6)带动转盘(7)和刷毛(9)旋转,对地面进行清扫;
C:控制器(35)控制水泵(4)运行,将水箱(2)内腔的水输送进密封罩(3)的内腔,使密封罩(3)内腔压力增大,密封罩(3)内腔的水依次经过竖管(5)和移动管(6)进入转盘(7)的内腔,转盘(7)内腔的水通过漏水孔(8)流至地面,使地面湿润,能够更好的对地面进行洗刷;
D:控制器(35)控制双轴电机(16)的转轴带动横杆(17)旋转,横杆(17)带动第一齿轮(18)旋转,第一齿轮(18)带动第二齿轮(21)旋转,第二齿轮(21)带动转杆(19)旋转,转杆(19)带动滚轮(20)旋转,使清洁机器人移动,对地面不用的位置进行清扫;
E:清洁机器人移动过程中遇到障碍物时,避障传感器(34)检测到吸尘管(31)前方有障碍物,将信息反馈给控制器(35),控制器(35)控制第二电机(23)的转轴带动滚轮座(24)旋转,滚轮座(24)带动转向轮(25)旋转,使移动机器人转向避开障碍物。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910800925.7A CN110754999B (zh) | 2019-08-28 | 2019-08-28 | 一种室内清洁机器人及工作原理 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910800925.7A CN110754999B (zh) | 2019-08-28 | 2019-08-28 | 一种室内清洁机器人及工作原理 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110754999A true CN110754999A (zh) | 2020-02-07 |
| CN110754999B CN110754999B (zh) | 2021-03-02 |
Family
ID=69329490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910800925.7A Active CN110754999B (zh) | 2019-08-28 | 2019-08-28 | 一种室内清洁机器人及工作原理 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110754999B (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111297270A (zh) * | 2020-03-31 | 2020-06-19 | 西安工程大学 | 一种扫地机器人的清扫装置 |
| CN111498328A (zh) * | 2020-04-15 | 2020-08-07 | 陈吉梅 | 一种环保分类回收垃圾桶及使用方法 |
| CN112171681A (zh) * | 2020-08-27 | 2021-01-05 | 南京驭逡通信科技有限公司 | 一种迎宾机器人用多向移动机构 |
| CN112212121A (zh) * | 2020-09-16 | 2021-01-12 | 南京驭逡通信科技有限公司 | 一种市政地下管道巡检机器人 |
| CN112741563A (zh) * | 2021-01-04 | 2021-05-04 | 成都职业技术学院 | 一种室内地面墙面清洁装置 |
| CN112806907A (zh) * | 2021-01-07 | 2021-05-18 | 浙江广厦建设职业技术大学 | 一种智能家居清理用扫地机器人 |
Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1144642A (zh) * | 1995-09-07 | 1997-03-12 | 黄平 | 多用途清洁机 |
| JP2003325406A (ja) * | 2002-05-17 | 2003-11-18 | Toshiba Tec Corp | 自走式クリーナ |
| KR20040086643A (ko) * | 2003-04-03 | 2004-10-12 | 주식회사 한울로보틱스 | 모터에 의해 작동되는 자동 청소로봇의 흡입장치 |
| US20060010640A1 (en) * | 2004-07-16 | 2006-01-19 | Yasuhiro Oka | Vacuum cleaner |
| CN1767781A (zh) * | 2003-02-21 | 2006-05-03 | 坦南特公司 | 利用抽取装置和污物转移洗涤介质的双模式地毯清洁装置 |
| CN201388979Y (zh) * | 2009-03-28 | 2010-01-27 | 李新民 | 一种高层建筑清洗装置 |
| CN204636228U (zh) * | 2015-05-27 | 2015-09-16 | 遂宁市长丰机械科技有限公司 | 一种多用扫帚 |
| CN205963938U (zh) * | 2016-07-01 | 2017-02-22 | 荆门市吉光环保科技有限责任公司 | 一种带积灰清理装置的吸尘器 |
| CN206063082U (zh) * | 2016-07-23 | 2017-04-05 | 皮武 | 吸尘拖地烘干机 |
| CN108143355A (zh) * | 2017-12-25 | 2018-06-12 | 郑州游爱网络技术有限公司 | 一种家用地砖高效清洁装置 |
| CN108774979A (zh) * | 2018-07-09 | 2018-11-09 | 南京海晨霞工程科技有限公司 | 一种桥梁建设用便于移动的护栏清洗装置 |
| CN108992002A (zh) * | 2018-06-28 | 2018-12-14 | 芜湖泰领信息科技有限公司 | 智能扫地机 |
| CN208301598U (zh) * | 2018-01-04 | 2019-01-01 | 江苏英凯电机有限公司 | 一种电动扫地机 |
| CN109199247A (zh) * | 2018-10-17 | 2019-01-15 | 王亮 | 一种节能型清洁用机器人 |
| CN109199261A (zh) * | 2017-06-30 | 2019-01-15 | 沈阳新松机器人自动化股份有限公司 | 压力自动调节洗地刷盘结构 |
-
2019
- 2019-08-28 CN CN201910800925.7A patent/CN110754999B/zh active Active
Patent Citations (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1144642A (zh) * | 1995-09-07 | 1997-03-12 | 黄平 | 多用途清洁机 |
| JP2003325406A (ja) * | 2002-05-17 | 2003-11-18 | Toshiba Tec Corp | 自走式クリーナ |
| CN1767781A (zh) * | 2003-02-21 | 2006-05-03 | 坦南特公司 | 利用抽取装置和污物转移洗涤介质的双模式地毯清洁装置 |
| KR20040086643A (ko) * | 2003-04-03 | 2004-10-12 | 주식회사 한울로보틱스 | 모터에 의해 작동되는 자동 청소로봇의 흡입장치 |
| US20060010640A1 (en) * | 2004-07-16 | 2006-01-19 | Yasuhiro Oka | Vacuum cleaner |
| CN201388979Y (zh) * | 2009-03-28 | 2010-01-27 | 李新民 | 一种高层建筑清洗装置 |
| CN204636228U (zh) * | 2015-05-27 | 2015-09-16 | 遂宁市长丰机械科技有限公司 | 一种多用扫帚 |
| CN205963938U (zh) * | 2016-07-01 | 2017-02-22 | 荆门市吉光环保科技有限责任公司 | 一种带积灰清理装置的吸尘器 |
| CN206063082U (zh) * | 2016-07-23 | 2017-04-05 | 皮武 | 吸尘拖地烘干机 |
| CN109199261A (zh) * | 2017-06-30 | 2019-01-15 | 沈阳新松机器人自动化股份有限公司 | 压力自动调节洗地刷盘结构 |
| CN108143355A (zh) * | 2017-12-25 | 2018-06-12 | 郑州游爱网络技术有限公司 | 一种家用地砖高效清洁装置 |
| CN208301598U (zh) * | 2018-01-04 | 2019-01-01 | 江苏英凯电机有限公司 | 一种电动扫地机 |
| CN108992002A (zh) * | 2018-06-28 | 2018-12-14 | 芜湖泰领信息科技有限公司 | 智能扫地机 |
| CN108774979A (zh) * | 2018-07-09 | 2018-11-09 | 南京海晨霞工程科技有限公司 | 一种桥梁建设用便于移动的护栏清洗装置 |
| CN109199247A (zh) * | 2018-10-17 | 2019-01-15 | 王亮 | 一种节能型清洁用机器人 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111297270A (zh) * | 2020-03-31 | 2020-06-19 | 西安工程大学 | 一种扫地机器人的清扫装置 |
| CN111297270B (zh) * | 2020-03-31 | 2021-07-13 | 西安工程大学 | 一种扫地机器人的清扫装置 |
| CN111498328A (zh) * | 2020-04-15 | 2020-08-07 | 陈吉梅 | 一种环保分类回收垃圾桶及使用方法 |
| CN112171681A (zh) * | 2020-08-27 | 2021-01-05 | 南京驭逡通信科技有限公司 | 一种迎宾机器人用多向移动机构 |
| CN112212121A (zh) * | 2020-09-16 | 2021-01-12 | 南京驭逡通信科技有限公司 | 一种市政地下管道巡检机器人 |
| CN112741563A (zh) * | 2021-01-04 | 2021-05-04 | 成都职业技术学院 | 一种室内地面墙面清洁装置 |
| CN112806907A (zh) * | 2021-01-07 | 2021-05-18 | 浙江广厦建设职业技术大学 | 一种智能家居清理用扫地机器人 |
| CN112806907B (zh) * | 2021-01-07 | 2022-03-04 | 浙江广厦建设职业技术大学 | 一种智能家居清理用扫地机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110754999B (zh) | 2021-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110754999B (zh) | 一种室内清洁机器人及工作原理 | |
| CN108670129B (zh) | 一种基于物联网的智能扫地机器人及其实现方法 | |
| CN108372508A (zh) | 一种智能扫吸拖机器人 | |
| CN111329389B (zh) | 一种吸尘可分离型扫地机器人 | |
| CN107080500B (zh) | 智能清洁机器人系统 | |
| CN108497984B (zh) | 一种具有清洗消毒功能的马桶盖 | |
| CN209018628U (zh) | 一种实验室用拖地机器人 | |
| CN108606736A (zh) | 一种实验室用拖地机器人 | |
| CN211299811U (zh) | 一种清洁扫地机器人装置 | |
| CN108685530A (zh) | 一种室内自动调节智能清洁机器人 | |
| CN104889095A (zh) | 多功能清洗机构、清洗工艺及模块化组合式清洗工作站 | |
| CN110840339A (zh) | 一种家用地面清洁机器人 | |
| CN203000795U (zh) | 能用于清洁竖直面及天花板面并能跨越阴角作业的吸尘车 | |
| CN204974546U (zh) | 多功能清洗机构及模块化组合式清洗工作站 | |
| CN207959405U (zh) | 一种全自动马桶清洗设备 | |
| CN109077677A (zh) | 一种可卷起的节能除尘装置 | |
| CN111297270A (zh) | 一种扫地机器人的清扫装置 | |
| CN105708390A (zh) | 带自清式结构的清洁器 | |
| CN218186636U (zh) | 一种台阶清扫装置 | |
| CN110419986A (zh) | 一种自动扫地机器人 | |
| CN213033117U (zh) | 一种工业加工用物料喷淋清洗设备 | |
| CN213887279U (zh) | 一种手推式模台清扫机 | |
| CN205393088U (zh) | 波轮旋转式超声波清洗机 | |
| CN205758450U (zh) | 带自清洗式结构的清洁器 | |
| CN211639398U (zh) | 一种电力施工用角磨机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |