CN110678406B - 与医疗管有关的装置和方法 - Google Patents
与医疗管有关的装置和方法 Download PDFInfo
- Publication number
- CN110678406B CN110678406B CN201880018193.XA CN201880018193A CN110678406B CN 110678406 B CN110678406 B CN 110678406B CN 201880018193 A CN201880018193 A CN 201880018193A CN 110678406 B CN110678406 B CN 110678406B
- Authority
- CN
- China
- Prior art keywords
- spool
- drive system
- medical tube
- tube
- guidewire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 9
- 239000000463 material Substances 0.000 claims description 89
- 239000012530 fluid Substances 0.000 claims description 67
- 239000007788 liquid Substances 0.000 claims description 59
- 238000004891 communication Methods 0.000 claims description 15
- 230000004044 response Effects 0.000 claims description 14
- 238000000576 coating method Methods 0.000 claims description 7
- 230000000694 effects Effects 0.000 claims description 7
- 239000011248 coating agent Substances 0.000 claims description 6
- 239000006227 byproduct Substances 0.000 claims description 4
- 239000002783 friction material Substances 0.000 claims description 4
- 206010061218 Inflammation Diseases 0.000 claims description 3
- 230000015556 catabolic process Effects 0.000 claims description 3
- 238000006731 degradation reaction Methods 0.000 claims description 3
- 238000005534 hematocrit Methods 0.000 claims description 3
- 230000004054 inflammatory process Effects 0.000 claims description 3
- 208000035143 Bacterial infection Diseases 0.000 claims description 2
- 206010011224 Cough Diseases 0.000 claims description 2
- 102000009123 Fibrin Human genes 0.000 claims description 2
- 108010073385 Fibrin Proteins 0.000 claims description 2
- BWGVNKXGVNDBDI-UHFFFAOYSA-N Fibrin monomer Chemical compound CNC(=O)CNC(=O)CN BWGVNKXGVNDBDI-UHFFFAOYSA-N 0.000 claims description 2
- WQZGKKKJIJFFOK-GASJEMHNSA-N Glucose Natural products OC[C@H]1OC(O)[C@H](O)[C@@H](O)[C@@H]1O WQZGKKKJIJFFOK-GASJEMHNSA-N 0.000 claims description 2
- 230000006793 arrhythmia Effects 0.000 claims description 2
- 206010003119 arrhythmia Diseases 0.000 claims description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 claims description 2
- 208000022362 bacterial infectious disease Diseases 0.000 claims description 2
- 239000002158 endotoxin Substances 0.000 claims description 2
- 229950003499 fibrin Drugs 0.000 claims description 2
- 239000008103 glucose Substances 0.000 claims description 2
- 239000001301 oxygen Substances 0.000 claims description 2
- 229910052760 oxygen Inorganic materials 0.000 claims description 2
- 239000011148 porous material Substances 0.000 claims description 2
- 102000004169 proteins and genes Human genes 0.000 claims description 2
- 108090000623 proteins and genes Proteins 0.000 claims description 2
- 239000003642 reactive oxygen metabolite Substances 0.000 claims description 2
- 230000036387 respiratory rate Effects 0.000 claims description 2
- 230000033764 rhythmic process Effects 0.000 claims description 2
- 230000002093 peripheral effect Effects 0.000 claims 5
- 230000002745 absorbent Effects 0.000 claims 1
- 239000002250 absorbent Substances 0.000 claims 1
- 239000011324 bead Substances 0.000 description 51
- 230000005540 biological transmission Effects 0.000 description 19
- 238000013519 translation Methods 0.000 description 13
- 239000008280 blood Substances 0.000 description 12
- 210000004369 blood Anatomy 0.000 description 12
- 230000007246 mechanism Effects 0.000 description 12
- 230000033001 locomotion Effects 0.000 description 10
- 210000001124 body fluid Anatomy 0.000 description 9
- 230000006698 induction Effects 0.000 description 9
- 239000003638 chemical reducing agent Substances 0.000 description 8
- 229920000642 polymer Polymers 0.000 description 8
- 239000003795 chemical substances by application Substances 0.000 description 7
- 239000003814 drug Substances 0.000 description 7
- 229910052751 metal Inorganic materials 0.000 description 7
- 239000002184 metal Substances 0.000 description 7
- 230000036961 partial effect Effects 0.000 description 7
- 239000004810 polytetrafluoroethylene Substances 0.000 description 7
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 7
- 239000000853 adhesive Substances 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 6
- 230000002401 inhibitory effect Effects 0.000 description 6
- -1 polypropylene Polymers 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 230000006378 damage Effects 0.000 description 5
- 229920000052 poly(p-xylylene) Polymers 0.000 description 5
- 230000036760 body temperature Effects 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 239000006260 foam Substances 0.000 description 4
- 239000000017 hydrogel Substances 0.000 description 4
- 208000015181 infectious disease Diseases 0.000 description 4
- 230000014759 maintenance of location Effects 0.000 description 4
- 238000011084 recovery Methods 0.000 description 4
- 239000007787 solid Substances 0.000 description 4
- 230000032258 transport Effects 0.000 description 4
- 229920004943 Delrin® Polymers 0.000 description 3
- 239000004698 Polyethylene Substances 0.000 description 3
- 229920005830 Polyurethane Foam Polymers 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 3
- 230000009471 action Effects 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 3
- 239000000956 alloy Substances 0.000 description 3
- 239000002260 anti-inflammatory agent Substances 0.000 description 3
- 229940121363 anti-inflammatory agent Drugs 0.000 description 3
- 210000000038 chest Anatomy 0.000 description 3
- 238000009472 formulation Methods 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 229920000573 polyethylene Polymers 0.000 description 3
- 229920001296 polysiloxane Polymers 0.000 description 3
- 239000011496 polyurethane foam Substances 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 239000010935 stainless steel Substances 0.000 description 3
- HTTJABKRGRZYRN-UHFFFAOYSA-N Heparin Chemical compound OC1C(NC(=O)C)C(O)OC(COS(O)(=O)=O)C1OC1C(OS(O)(=O)=O)C(O)C(OC2C(C(OS(O)(=O)=O)C(OC3C(C(O)C(O)C(O3)C(O)=O)OS(O)(=O)=O)C(CO)O2)NS(O)(=O)=O)C(C(O)=O)O1 HTTJABKRGRZYRN-UHFFFAOYSA-N 0.000 description 2
- 206010028980 Neoplasm Diseases 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000004696 Poly ether ether ketone Substances 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 239000004743 Polypropylene Substances 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 2
- 208000007536 Thrombosis Diseases 0.000 description 2
- 239000003416 antiarrhythmic agent Substances 0.000 description 2
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 239000013013 elastic material Substances 0.000 description 2
- 239000013536 elastomeric material Substances 0.000 description 2
- 229960002897 heparin Drugs 0.000 description 2
- 229920000669 heparin Polymers 0.000 description 2
- 210000004072 lung Anatomy 0.000 description 2
- 230000000873 masking effect Effects 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 229910001172 neodymium magnet Inorganic materials 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 229920002530 polyetherether ketone Polymers 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 229920001155 polypropylene Polymers 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 229920002379 silicone rubber Polymers 0.000 description 2
- 239000004945 silicone rubber Substances 0.000 description 2
- 239000011780 sodium chloride Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000000153 supplemental effect Effects 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 229940124597 therapeutic agent Drugs 0.000 description 2
- 229920001169 thermoplastic Polymers 0.000 description 2
- 239000004416 thermosoftening plastic Substances 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 230000002792 vascular Effects 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- SGKRLCUYIXIAHR-AKNGSSGZSA-N (4s,4ar,5s,5ar,6r,12ar)-4-(dimethylamino)-1,5,10,11,12a-pentahydroxy-6-methyl-3,12-dioxo-4a,5,5a,6-tetrahydro-4h-tetracene-2-carboxamide Chemical compound C1=CC=C2[C@H](C)[C@@H]([C@H](O)[C@@H]3[C@](C(O)=C(C(N)=O)C(=O)[C@H]3N(C)C)(O)C3=O)C3=C(O)C2=C1O SGKRLCUYIXIAHR-AKNGSSGZSA-N 0.000 description 1
- VRBFTYUMFJWSJY-UHFFFAOYSA-N 28804-46-8 Chemical compound ClC1CC(C=C2)=CC=C2C(Cl)CC2=CC=C1C=C2 VRBFTYUMFJWSJY-UHFFFAOYSA-N 0.000 description 1
- 208000006017 Cardiac Tamponade Diseases 0.000 description 1
- 208000035473 Communicable disease Diseases 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 208000032843 Hemorrhage Diseases 0.000 description 1
- 239000004264 Petrolatum Substances 0.000 description 1
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- 229920002614 Polyether block amide Polymers 0.000 description 1
- 241000555745 Sciuridae Species 0.000 description 1
- 208000034189 Sclerosis Diseases 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 239000004098 Tetracycline Substances 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- WAIPAZQMEIHHTJ-UHFFFAOYSA-N [Cr].[Co] Chemical class [Cr].[Co] WAIPAZQMEIHHTJ-UHFFFAOYSA-N 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000000202 analgesic effect Effects 0.000 description 1
- 239000003242 anti bacterial agent Substances 0.000 description 1
- 230000000843 anti-fungal effect Effects 0.000 description 1
- 230000002965 anti-thrombogenic effect Effects 0.000 description 1
- 239000000504 antifibrinolytic agent Substances 0.000 description 1
- 229940121375 antifungal agent Drugs 0.000 description 1
- 239000002246 antineoplastic agent Substances 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000003115 biocidal effect Effects 0.000 description 1
- 208000034158 bleeding Diseases 0.000 description 1
- 230000000740 bleeding effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 201000011510 cancer Diseases 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 239000002327 cardiovascular agent Substances 0.000 description 1
- 229940125692 cardiovascular agent Drugs 0.000 description 1
- 238000005266 casting Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 210000001072 colon Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000002788 crimping Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 229960003722 doxycycline Drugs 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000003527 fibrinolytic agent Substances 0.000 description 1
- 239000000945 filler Substances 0.000 description 1
- 238000002637 fluid replacement therapy Methods 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000012678 infectious agent Substances 0.000 description 1
- 230000002458 infectious effect Effects 0.000 description 1
- 230000036512 infertility Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000002386 leaching Methods 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 229920002529 medical grade silicone Polymers 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000002480 mineral oil Substances 0.000 description 1
- 235000010446 mineral oil Nutrition 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 230000000414 obstructive effect Effects 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 229920009441 perflouroethylene propylene Polymers 0.000 description 1
- 229940066842 petrolatum Drugs 0.000 description 1
- 235000019271 petrolatum Nutrition 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 201000003144 pneumothorax Diseases 0.000 description 1
- 239000004417 polycarbonate Substances 0.000 description 1
- 229920000515 polycarbonate Polymers 0.000 description 1
- 229920000728 polyester Polymers 0.000 description 1
- 230000002685 pulmonary effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 230000028327 secretion Effects 0.000 description 1
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 229910000601 superalloy Inorganic materials 0.000 description 1
- 239000000454 talc Substances 0.000 description 1
- 229910052623 talc Inorganic materials 0.000 description 1
- 229940033134 talc Drugs 0.000 description 1
- 229960002180 tetracycline Drugs 0.000 description 1
- 229930101283 tetracycline Natural products 0.000 description 1
- 235000019364 tetracycline Nutrition 0.000 description 1
- 150000003522 tetracyclines Chemical class 0.000 description 1
- 210000000115 thoracic cavity Anatomy 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 230000000472 traumatic effect Effects 0.000 description 1
Images








































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/70—Cleaning devices specially adapted for surgical instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H75/00—Storing webs, tapes, or filamentary material, e.g. on reels
- B65H75/02—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks
- B65H75/34—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables
- B65H75/36—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables without essentially involving the use of a core or former internal to a stored package of material, e.g. with stored material housed within casing or container, or intermittently engaging a plurality of supports as in sinuous or serpentine fashion
- B65H75/362—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables without essentially involving the use of a core or former internal to a stored package of material, e.g. with stored material housed within casing or container, or intermittently engaging a plurality of supports as in sinuous or serpentine fashion with stored material housed within a casing or container
- B65H75/364—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables without essentially involving the use of a core or former internal to a stored package of material, e.g. with stored material housed within casing or container, or intermittently engaging a plurality of supports as in sinuous or serpentine fashion with stored material housed within a casing or container the stored material being coiled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0022—Monitoring a patient using a global network, e.g. telephone networks, internet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/01—Measuring temperature of body parts ; Diagnostic temperature sensing, e.g. for malignant or inflamed tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/0205—Simultaneously evaluating both cardiovascular conditions and different types of body conditions, e.g. heart and respiratory condition
- A61B5/02055—Simultaneously evaluating both cardiovascular condition and temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/024—Measuring pulse rate or heart rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Measuring devices for evaluating the respiratory organs
- A61B5/0816—Measuring devices for examining respiratory frequency
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Measuring devices for evaluating the respiratory organs
- A61B5/0823—Detecting or evaluating cough events
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1118—Determining activity level
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/318—Heart-related electrical modalities, e.g. electrocardiography [ECG]
- A61B5/346—Analysis of electrocardiograms
- A61B5/349—Detecting specific parameters of the electrocardiograph cycle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4824—Touch or pain perception evaluation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/71—Suction drainage systems
- A61M1/74—Suction control
- A61M1/75—Intermittent or pulsating suction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/83—Tube strippers, i.e. for clearing the contents of the tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/84—Drainage tubes; Aspiration tips
- A61M1/86—Connectors between drainage tube and handpiece, e.g. drainage tubes detachable from handpiece
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0111—Aseptic insertion devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0113—Mechanical advancing means, e.g. catheter dispensers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0172—Exchanging a guidewire while keeping the catheter in place
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
- A61M25/1018—Balloon inflating or inflation-control devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M27/00—Drainage appliance for wounds or the like, i.e. wound drains, implanted drains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/02—Cleaning pipes or tubes or systems of pipes or tubes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H75/00—Storing webs, tapes, or filamentary material, e.g. on reels
- B65H75/02—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks
- B65H75/34—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables
- B65H75/38—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material
- B65H75/40—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material mobile or transportable
- B65H75/406—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material mobile or transportable hand-held during use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H75/00—Storing webs, tapes, or filamentary material, e.g. on reels
- B65H75/02—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks
- B65H75/34—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables
- B65H75/38—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material
- B65H75/44—Constructional details
- B65H75/4402—Guiding arrangements to control paying-out and re-storing of the material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H75/00—Storing webs, tapes, or filamentary material, e.g. on reels
- B65H75/02—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks
- B65H75/34—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables
- B65H75/38—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material
- B65H75/44—Constructional details
- B65H75/4457—Arrangements of the frame or housing
- B65H75/4471—Housing enclosing the reel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H75/00—Storing webs, tapes, or filamentary material, e.g. on reels
- B65H75/02—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks
- B65H75/34—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables
- B65H75/38—Cores, formers, supports, or holders for coiled, wound, or folded material, e.g. reels, spindles, bobbins, cop tubes, cans, mandrels or chucks specially adapted or mounted for storing and repeatedly paying-out and re-storing lengths of material provided for particular purposes, e.g. anchored hoses, power cables involving the use of a core or former internal to, and supporting, a stored package of material
- B65H75/44—Constructional details
- B65H75/4481—Arrangements or adaptations for driving the reel or the material
- B65H75/4486—Electric motors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/70—Cleaning devices specially adapted for surgical instruments
- A61B2090/701—Cleaning devices specially adapted for surgical instruments for flexible tubular instruments, e.g. endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M2025/0019—Cleaning catheters or the like, e.g. for reuse of the device, for avoiding replacement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M2025/09175—Guide wires having specific characteristics at the distal tip
- A61M2025/09183—Guide wires having specific characteristics at the distal tip having tools at the distal tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/02—General characteristics of the apparatus characterised by a particular materials
- A61M2205/0216—Materials providing elastic properties, e.g. for facilitating deformation and avoid breaking
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/18—General characteristics of the apparatus with alarm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3303—Using a biosensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3324—PH measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3331—Pressure; Flow
- A61M2205/3344—Measuring or controlling pressure at the body treatment site
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/50—General characteristics of the apparatus with microprocessors or computers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/82—Internal energy supply devices
- A61M2205/8206—Internal energy supply devices battery-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2209/00—Ancillary equipment
- A61M2209/10—Equipment for cleaning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/10—Trunk
- A61M2210/101—Pleural cavity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/20—Blood composition characteristics
- A61M2230/201—Glucose concentration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/20—Blood composition characteristics
- A61M2230/207—Blood composition characteristics hematocrit
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/20—Blood composition characteristics
- A61M2230/208—Blood composition characteristics pH-value
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/63—Motion, e.g. physical activity
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M25/09041—Mechanisms for insertion of guide wires
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/02—Cleaning pipes or tubes or systems of pipes or tubes
- B08B9/027—Cleaning the internal surfaces; Removal of blockages
- B08B9/04—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes
- B08B9/043—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes moved by externally powered mechanical linkage, e.g. pushed or drawn through the pipes
- B08B9/0436—Cleaning the internal surfaces; Removal of blockages using cleaning devices introduced into and moved along the pipes moved by externally powered mechanical linkage, e.g. pushed or drawn through the pipes provided with mechanical cleaning tools, e.g. scrapers, with or without additional fluid jets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/36—Wires
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Pulmonology (AREA)
- Physics & Mathematics (AREA)
- Cardiology (AREA)
- Physiology (AREA)
- Vascular Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Pain & Pain Management (AREA)
- Psychiatry (AREA)
- Hospice & Palliative Care (AREA)
- Otolaryngology (AREA)
- Computer Networks & Wireless Communication (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Child & Adolescent Psychology (AREA)
- Mechanical Engineering (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
- External Artificial Organs (AREA)
Abstract
本发明公开了用于清除医疗管中的阻塞物的装置和方法。在示例性实施例中,本发明公开了一种线轴驱动系统,用于致动医疗管内的导丝。该线轴驱动系统可以是手持式的一次性设备,其具有其中带有线轴的线轴外壳,用于穿过线轴外壳的入口交替地推进和抽出导丝。轨道可以与线轴的周边间隔开并围绕线轴的周边延伸,以在线轴旋转时将导丝引导到线轴上或从线轴上离开。本发明还公开了用于致动导丝的其他实施例和设备及其方法。
Description
有关专利申请的相互引用
本申请要求2017年2月16日提交的美国临时申请号:62/460,070,在此通过引用整体合并该美国临时专利申请。
背景技术
医疗管能够用于将液体或者设备传递到身体中和/或者从身体中的房室(compartment)和结构中抽出体液、分泌物和碎屑。例如,医疗管能够用于从一个人的膀胱、从消化道的结肠或者其他部位、或者从肺或者与各种治疗有关的其他器官抽出液体。作为另一个示例,医疗管能够用于抽出通常在感染性或者创伤性外科手术后累积在诸如纵隔、心包、胸膜或腹膜空间的体腔中的血液和其他液体。作为又另一个示例,医疗管能够用于将液体传送到人体消化道内供养,或者还能够用于进入脉管系统以移除或者传送液体、药物或者设备。通常,医疗管插入患者,使得其末端置于或者邻近要求移除或者传送材料的空间,而近部保留在患者的体外,在此其能够例如接近和/或连接到抽吸源。
流过医疗管的液体(特别是当暴露于血液、血小板、脓液或其他厚物质时)能够在医疗管中形成凝块或者其他阻塞物,这能够部分地或者全部阻塞管中的通路。医疗管的阻塞物能够破坏移除或者传送液体和初始布置的其他材料的效率,甚至使医疗管部分地或者全部失去功能。在某些情况下,无功能管可能具有严重威胁或者可能威胁生命的后果。例如,如果在心脏外科手术或者肺外科手术后在胸管中存在障碍物,则在不充分抽吸的情况下导致液体围绕心脏和肺的堆积能够导致各种不利事态发生,诸如心包填塞子和气胸。
附图说明
图1示出了具有植入患者的医疗管的液体系统的示意性透视图;
图2示出了用于液体系统的示例性排水组件的示意性透视图;
图3示出了用于液体系统的示例性真空管的示意性横截面图和示意性透视图;
图4示出了用于液体系统的示例性阀组件的示意性透视图;
图5示出了用于液体系统的带有一个示例性间隙线组件的医疗管的局部视图;
图6示出了带有第二示例性间隙线组件的医疗管的示意性透视图;
图7示出了第三示例性间隙线组件的局部视图;
图8示出了带有第四示例性间隙线组件的医疗管的示意性透视图;
图9示出了带有第五示例性间隙线组件的医疗管的示意性透视图;
图10示出了第六示例性间隙线组件的局部透视图;
图11A示出了带有第七示例性间隙线组件的医疗管的示意性侧视图和示意性剖视图;
图11B示出了作为第七示例性间隙线组件的一部分的示例性珠子(bead)的侧视图和正视图;
图11C示出了作为第七示例性间隙线组件的一部分的另一示例性珠子的侧视图、俯视图和正视图;
图11D示出了作为第七示例性间隙线组件的一部分的又一示例性珠子的侧视图、俯视图和正视图;
图11E示出了带有多个珠子的间隙线组件;
图11F示出了作为第七示例性间隙线组件的一部分的又一示例性珠子的侧视图;
图12A示出了带有第八示例性间隙线组件的医疗管的示意性透视图,该间隙线组件具有球形间隙构件;
图12B示出了带有杯形间隙构件的第八示例性间隙线组件的示意性透视图;
图13示出了第九示例性间隙线组件的示意性透视图;
图14示出了用于液体系统的间隙线组件的一个示例驱动系统的示意性横截面;
图15示出了图14中所示的驱动系统的另一示意性剖视图;
图16示出了图14中所示的带有导螺杆驱动机构的驱动系统的示意性横截面图;
图17示出了可用于驱动图14中所示的驱动系统的示例性线性致动器;
图18示出了用于液体系统的间隙线组件的第二示例性驱动系统的示意性局部剖视透视图;
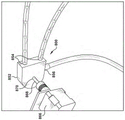
图19A示出了用于液体系统的间隙线组件的第三示例性驱动系统的示意性透视图;
图19B示出了第三示例性驱动系统的分解图;
图19C示出了第三示例性驱动系统的示意性透视图,其中控制系统和电动机外壳被移除;
图19D示出了第三示例性驱动系统的示意性透视图,其中电动机外壳被移除;
图19E示出了第三示例性驱动系统的变型的示意性局部横截面视图;
图20示出了第三示例性驱动系统的另一变型的示意性局部横截面视图;
图21是用于液体系统的间隙线组件的第四示例性驱动系统的示意性透视图;
图22A是用于液体系统的间隙线组件的第五示例性驱动系统的分解图;
图22B是第五示例性驱动系统的透视图;
图23是驱动系统的示意性透视图,其中电源组件与驱动系统的主体分离;
图24示出了带有驱动系统的液体系统的示意性侧视图,其中该驱动系统被构造为允许校准驱动系统;
图25是能够用于将液体系统的医疗管与另一结构耦合的示例性Y形耦合器的横截面图;
图26是能够用于将液体系统的医疗管与另一结构耦合的另一示例性Y形耦合器的横截面图;
图27是能够用于将液体系统的医疗管与另一结构耦合的另一示例性Y形耦合器的横截面图;
图28是示出用于液体系统的示例性弹性构件的示意性局部横截面图;
图29是示出用于液体系统的示例性锥形座的示意性局部横截面图;
图30是所述液体系统的另一个实施例。
具体实施方式
此使用特定术语仅为了方便,而不作为对本发明的限制。参考附图最好地理解相对语音,附图中,利用类似的参考编号表示类似或者相似的物品。此外,在附图中,在某种程度上可以以原理方式示出特定特征。
请注意,如当描述表示相对位置的两个特征时在此使用术语“近”和“末”,这两个特征通常具有沿着扎在患者身上的液路,末端特征比沿着液体路径的近端特征更靠近患者。例如,对于向患者抽取或者输送液体的医疗管,医疗管的末端或者末部比沿着液体的流路的医疗管的近端或者近部更靠近患者。作为另一个示例,在液体系统中,其中医疗管将患者流动地连接到排水管,排水管将靠近医疗管,因为排水管比沿着该系统的流路的医疗管更远离患者。相反,医疗管将位于排水管的末端,因为医疗管比沿着该系统的流路的排水管更靠近患者。
请注意,本文所用的术语“材料”可以指血液或其他体液、药物、食物、碎片、凝块材料(诸如血凝块)、空气或任何其他液体、固体或半固体,包括脓。
当描述两个或更多个特征时,在此使用的术语“耦合”意味着这些特征彼此固定地或可移动地连接。这些特征可以是相同部件的整体部分,或者这些特征可以是不同的部件,这些部件使用诸如例如紧固件、粘合剂、包覆成型、钩、螺纹接头、滑入配合连接、焊接、焊合、捆扎、压接、磁力耦合、压配、倒钩连接等结构或方法直接或间接连接。当描述两个或更多个特征时,在此使用的术语“流动地耦合”,意味着这些特征以这样的方式耦合,使得在两个特征之间直接或通过一些中间结构提供液体连通。这样的中间结构可以是例如软管、管、软管倒钩、螺纹连接器、压缩配件等。
现在,以下将参考附图更全面描述示例,附图中示出示例性实施例。
图1示出了具有医疗管100的液体系统10的示意图,该医疗管100包括定位在患者体内的末端102和定位在患者体外的近端104。医疗管100可对应于美国专利申请公开号:2015/0231361中公开的医疗管,其内容作为展示为A附于本文中并且通过引用整体并入本文。
医疗管100是管状构件,其限定通道106,通道106从其末端102延伸通过医疗管100到其近端104,并提供通过医疗管100的液体连通。优选地,医疗管100包括具有弹性的材料,诸如,例如硅树脂或一些其他弹性聚合物,诸如各种热塑性塑料之一。使用弹性材料可有助于促进医疗管100和诸如倒钩之类的液体配件之间的液体密封,因为当耦合到弹性管时,弹性管将倾向于在液体配件上收缩。此外,与诸如聚丙烯或聚乙烯的更硬的材料的管相比,柔性的弹性管100可以减少患者的不适。但是,如果需要,可以使用这些和其他刚性材料。此外,与诸如聚丙烯、聚乙烯、聚酰亚胺、金属等更硬的材料的管相比,柔性的弹性管100可以减少患者的不适和潜在的伤害。然而,如果需要,可以使用这些和其他刚性材料。此外,在一些示例中,医疗管100可包括两种或更多种材料的复合物,诸如,例如热塑性塑料和金属。优选地,医疗管100由透明(即,透明或基本透明)材料制成,因此操作者可以看到其中的任何凝块材料或其他碎屑以及其移除。
通过医疗管100的通道106,医疗管100可用于将材料(例如,药物、营养物、仪器等)输送到患者身体和/或从患者身体移除材料(例如,血液、凝块、其他体液等)。在本示例中,医疗管100插入并用于从患者的胸腔排出液体,因此被称为胸管。然而,应当理解,其他示例中的医疗管100可用作例如导管,从其他孔(除了胸腔)排出液体的手术引流管、气管内导管、饲管、胃管、血管通路管、腹膜管、将材料输送到消化道或从消化道输送材料的管等。
在一些示例中,液体系统10可包括排水组件200,该排水组件200构造成从患者身体和/或医疗管100内收集材料(例如,体液、碎片、凝块等)。排水组件200包括容器202,该容器202流动地耦合到医疗管100的近端104,该容器202可以容纳和收集所抽取的材料。优选地,容器202流动地耦合到医疗管100,以形成医疗管100和容器202之间的液体连通的闭合路径。当描述两个特征之间的液体连通时,在此使用的短语“液体连通的闭合路径”旨在描述两个特征之间的液路,其中沿着液路限制暴露于外部环境,从而保留可能存在于液路内的无菌区。例如,两个特征之间的液路可以由管限定,该管在其两端耦合到两个特征并且沿其长度没有直接或间接暴露于外部环境的开口。在一些示例中,可以使用例如阀或过滤器沿着液路限制暴露于外部环境。此外,在一些示例中,液路将保持相对于外部环境的压力。
排水组件200可以连接到真空源,以在医疗管100上抽真空,或者它可以构造成产生真空本身。施加该真空,以将材料从体腔和/或医疗管100抽出到容器202中。医疗管100内产生的真空可以帮助维持体内的正常生理负压。此外,产生的真空可以是一致的或间歇的。此外,真空源,例如排水组件200,可由操作者手动操作或自动操作,以产生响应一个或多个条件的真空。
转到图2,示出了一个示例性排水组件200,其具有容器202,容器202包括入口208和出口210,入口208流动地耦合到医疗管100的近端104,以形成入口208和医疗管100之间的液体连通的闭合路径。入口208可包括止回阀,其允许材料(例如,血液、凝块等)从医疗管100排到容器202中,同时抑制液体(例如,空气)和其他材料通过入口208离开容器202。此外,出口210可包括内部的止回阀,其允许材料(例如,空气、血液等)通过出口210从容器202逸出,同时抑制液体(例如,空气)和其他材料通过出口210进入容器。容器202可塌缩,以减小容器202内的容积并迫使液体(例如,空气、血液)通过出口210流出容器202。然后,容器202可膨胀,以增加其内部容积,从而产生真空,通过入口208将材料从医疗管100吸入容器202中。
图2中的排水组件200还包括一个或多个致动器214,该致动器214可操作,以使容器202塌缩和膨胀。所示示例中的致动器214是线性致动器,其可以前进和缩回,以分别使容器202膨胀和塌缩。然而,在其他示例中,致动器214可以包括其他装置,诸如弹簧,该弹簧可操作,以使容器202塌缩和膨胀。
在一些示例中,液体系统10包括控制系统300,控制系统300可被构造成自动操作液体系统10的一个或多个方面,诸如,例如上述排水组件200和/或如下进一步描述的任何方面。控制系统300包括控制器302和控制界面304(例如,按钮、开关、触摸屏等),其可允许用户选择性地控制(例如,编程、操作等)该控制系统300。此外,控制系统300可包括一个或多个传感器306,其可操作地连接到控制器302并且构造成检测特定参数并且向控制器302发送指示检测到的参数的信号。每个传感器306可位于医疗管100或液体系统10的一些其他部分内。此外,由每个传感器306检测的参数可以是例如医疗管100的取向(例如,倾斜);医疗管100内的间隙构件或一些其他结构的位置;医疗管100内的材料(例如,体液)的压力水平、pH水平、葡萄糖水平、蛋白质水平或氧化还原状态;医疗管100内的障碍物;医疗管100中的扭结;医疗管100中的纤维蛋白凝块降解副产物、内毒素、细菌感染副产物、活性氧或血细胞比容的量;患者的体温、心率和节律、心律失常、呼吸频率、炎症程度、疼痛程度或血氧饱和度;患者在床上的方向;患者的活动水平;患者的咳嗽;患者每天步行的步数;由患者执行的一种活动(例如,爬楼梯);患者的位置;患者在特定区域(例如,OR、ICU、病房、康复中心、家中等)的时间;排水参数(例如,缺乏空气、每小时最少的液体等);或其任何组合。在一个实施例中,一个或多个传感器306可以包括GPS跟踪器,使得可以跟踪患者的位置(例如,在OR、ICU、降压单元、康复单元、家、ER等内)。
控制系统300的控制器302可以与网络系统进行操作性通信,以将由控制器302收集或产生的数据经由网络发送到例如用于监视和收集关于患者的数据的系统(例如,临床医生的电话)或者连接到患者的液体系统100。例如,控制系统300可发送与由传感器306检测到的一个或多个参数相对应的数据。作为另一个示例,控制器302可从一个或多个传感器306收集数据,然后执行算法,以生成基于收集的数据的输出,然后可通过网络发送。例如,在一个示例中,控制器302可以执行算法,该算法基于由传感器306检测到的一个或多个参数来确定患者的预期恢复。然后可以通过网络将预期恢复输出发送到监视系统(例如,临床医生的电话)。网络可以是任何系统,其中两个或更多个设备经由电线连接或无线连接(例如,通过蓝牙或Wi-Fi),使得数据可以从一个设备传输到另一个设备。例如,网络可以是通过因特网在两个或更多个设备之间共享数据(例如,检测到的参数)的云系统。
在一些示例中,控制器302可被构造为响应于由传感器306检测到的参数以激活一个或多个警报310。每个警报310可以是轻的,有声的电子信息(例如,文本或电子邮件),或其任何组合。例如,在一个示例中,控制器302可基于患者的预期恢复来激活绿色、黄色或红色的光。作为另一个示例,控制器302可激活警报,以指示患者何时可能需要移动(例如,步行或起床)。在另一个示例中,控制器302可基于系统的状态(例如,医疗管100内的压力;医疗管100中的扭结;一个或多个致动器、电动机或者系统的其他设备的开/关模式;等)来激活警报310。
如图2所示,控制系统300的控制器302可以可操作地耦合到排水组件200的致动器214,并构造成自动操作致动器214,以响应于由传感器306检测到的一个或多个参数。特别地,控制器302可被构造成自动操作致动器214,以在医疗管100内产生或终止真空,以响应于检测到的参数。产生的真空可以是一致的、间歇的和/或者可变的压力。
转到图3,在一些示例中,排水组件200可包括真空管240,其通过后者的近端至少部分地插入医疗管100内。真空管240的末端242可包括入口244,用于容纳/吸入医疗管100内的材料。与此同时,真空管240的近端可流动地耦合到真空源,诸如,例如图2中所示的以及如上所述的可塌缩容器202。真空管240可在医疗管100内移动,使得真空管240的入口244可朝向医疗管100的末端102前进并朝向医疗管100的近端104缩回,以调节真空管的入口244沿着医疗管100的通道106的位置。调节入口244的位置可能是有利的,特别是如果由排水组件200抽出的液体或其他材料被限制在医疗管100的特定区域(例如,在医疗管100中的U形沟道处)。
为了调节真空管240的位置,排水组件200可包括具有或者可收缩护套246形式的排水管,该可收缩护套246具有末端248和近端250。护套246的末端248可固定或者流动地连接到医疗管100的近端104,并且真空管240可穿过护套246延伸到医疗管100中。真空管240可相对于护套246的近端250固定,使得当护套246收缩并且近端250朝向护套246的末端248移动时,真空管240及其入口244将穿过医疗管100朝向医疗管100的末端102前进。相反地,当护套246膨胀并且近端250远离护套246的末端248移动时,真空管240及其入口244将缩回并从医疗管100的末端102抽出。
上述的护套246可以使用控制系统,诸如,例如上述的控制系统300)手动或自动地膨胀和/或收缩。特别地,控制系统300的控制器302可以可操作地耦合到致动器(例如,线性致动器),该致动器可选择性地操作以膨胀和/或收缩护套246,以响应于由控制系统300的传感器306检测到的参数。
当液体或其他材料驻留在医疗管100中或通过医疗管100传递时,一些材料(例如,碎片、凝块等)可积聚在医疗管100内,从而阻塞通过医疗管100的材料和/或真空的传递。上述的真空有时足以在没有辅助干预的情况下将这种积聚的材料通过医疗管100吸入容器202中。然而,在某些情况下,具有可以破坏(例如,收集、驱逐、移动、分开、穿透等)积聚的材料以帮助清除医疗管100的阻塞子物的额外干预可能是有帮助的。
例如,转到图4,在一些示例中,排水组件200可包括一个或多个阀254,阀254构造成脉动在医疗管100内产生的真空,以便于移除积聚在医疗管100内的材料。例如,可定位每个阀254,在医疗管100内,在容器202的入口208内,或沿着医疗管100和真空源(例如容器202)之间的连通的液路的任何其他位置。每个阀254可以手动或自动地选择性地打开和闭合,以打开和闭合医疗管100和真空源之间的液体连通,从而脉动医疗管100内产生的真空。例如,在一些示例中,每个阀254可以可操作地耦合到上述控制系统300的控制器302,其可自动打开和闭合阀254,以脉动真空,以响应于由控制系统300的传感器306检测到的一个或多个参数(例如,管堵塞子)。在医疗管100内脉动真空可有助于在医疗管100内产生湍流,这可破坏积聚在医疗管100的通道106内的材料,从而便于积聚的材料的移除。
返回图1,在一些示例中,液体系统10可包括间隙线组件400,其可在医疗管100的通道106内被致动(例如,平移、旋转、振动、振荡等),以破坏积聚在通道106内的材料并帮助清除医疗管100的阻塞物。间隙线组件400包括细长的导丝402,并且在一些示例中,可包括耦合到导丝402的一个或多个间隙构件,其可以促进对积聚在通道106内的材料的破坏。优选地,导丝402包括具有足够柔性的材料,使得它可以在医疗管100内的线组件400的平移(例如,插入)期间交涉医疗管100中的沟道。另外,导丝402优选地包括具有足够坚硬或硬度的材料,使得导丝402和与其耦合的任何间隙构件可破坏(例如,移动)积聚的材料而不会引起导丝402自我扭结或对折。例如,导丝402可包括镍-钛合金(例如,镍钛诺)、不锈钢、钛、形状记忆合金、超合金、钴-铬合金(例如, )和/或其他合金。在一些示例中,导丝402可包括一种或多种聚合物,诸如PEEK、聚酰亚胺或其他聚合物。导丝402可包括两种或更多种材料的组合/复合物,诸如,例如一种或多种合金和一种或多种聚合物。此外,与其耦合的任何间隙构件可包括类似的材料,并且在一些示例中,可由导丝402自身形成。
)和/或其他合金。在一些示例中,导丝402可包括一种或多种聚合物,诸如PEEK、聚酰亚胺或其他聚合物。导丝402可包括两种或更多种材料的组合/复合物,诸如,例如一种或多种合金和一种或多种聚合物。此外,与其耦合的任何间隙构件可包括类似的材料,并且在一些示例中,可由导丝402自身形成。
现在参考图5-14,现在将描述间隙线组件400的各种实施例。
图5示出了间隙线组件400的一个实施例,其中导丝402是平面带状的形式,其纵向延伸穿过通道106,并且缠绕成使得其围绕医疗管100的轴线X螺旋。该实施例中的间隙线组件400可不包括附加的间隙构件(间隙线本身可充当间隙构件)并且可以通过例如使间隙线组件400绕轴线X旋转在通道106中移动,使间隙线组件400朝向医疗管100的末端102前进,和/或使间隙线组件400朝向医疗管100的近端104缩回。
图6示出了间隙线组件400的另一个实施例,其中当沿着轴线X观察时,导丝402具有圆形螺旋构造并且围绕医疗管100的轴线X盘旋。然而,其他横截面和构造在其他示例中也是可能的。该实施例中的间隙线组件400可在其末端处包括钩408,钩408钩在医疗管100的末端102上。可设置覆盖医疗管100的末端102和钩408的帽(为清楚起见未示出),以允许钩408围绕末端102自由移动而不受身体结构或组织的干扰。与此同时,间隙线组件的近端可以耦合到医疗管100的近端104或液体系统10的靠近钩408的一些其他部分。间隙线组件400可以在通道106内被例如通过使间隙线组件400围绕轴线X连续或间歇地沿相同方向或以摆动方式旋转而致动。当间隙线组件400旋转时,钩408将围绕医疗管的末端102的周边移动,使得间隙线组件400的末端不会与间隙线组件400的其余部分自然地结合而是与其自由地移动。在图6中的该实施例中,线组件400的旋转在适当的方向上可以产生螺旋钻效应,该螺旋钻效应倾向于将通道106内的积聚的碎屑朝向医疗管100的出口端向近端传送。
图7示出了间隙线组件400的另一个实施例,其中导丝402具有圆形横截面并且沿其长度具有一个或多个沟道412。然而,在其他示例中,其他横截面和构造也是可能的。在一些示例中,间隙线组件400的末端将位于医疗管100的末端102和/或医疗管100的一些其他部分内,并且将在医疗管100内自由移动(例如,旋转)。然后,间隙线组件400的近端可以在相同方向上连续地或间歇地或以振荡方式旋转。在其他示例中,间隙线组件400可以在其末端处固定到医疗管100的末端102和/或医疗管100的一些其他部分。然后,间隙线组件400可以通过例如,间歇线组件400的近端围绕医疗管100的纵向轴线(例如,图6中的X轴)以振荡的方式连续或间歇旋转而被致动。由于线组件400的末端是固定的,因此末端将阻止线组件400的移动并使线组件400朝向自然静止位置偏置。当通道106内的间隙线组件400的部分围绕轴线X振荡时,线组件400的这种偏置可以帮助产生鞭打动作,这可以促进积聚在医疗管100内的材料的破坏。在一个实施例中,线没有设定沟道但是具有比连接到其末端和近端处的固定点所需的长度更长的长度,使得多余的材料部分地在管内缠绕线。当通过旋转或其他方式致动近端时,产生鞭打动作。
图8示出了间隙线组件400的另一个实施例,其中导丝402具有圆形横截面,并且线组件400包括多个间隙构件416,其耦合到导丝402或形成导丝402的一部分,使得间隙构件416沿线402的长度间隔开,优选地以恒定间距间隔开。在优选的实施例中,每个间隙构件416通过将线402的一部分弯曲成螺旋形而形成,优选地,该间隙构件416具有与医疗管100的内径相当或略小的总直径。由于间隙线组件400通过医疗管100前进或缩回,每个间隙构件416可以接合医疗管100的内表面,以帮助破坏积聚在内表面上的任何材料。通过具有沿着线402间隔开的多个间隙构件416,间隙线组件400可接合医疗管的内表面的多个部分,同时平移穿过医疗管100。此外,线402可被致动小于整个长度的医疗管100,使得重复致动经由多个间隙构件416向近端输送材料穿过管100的整个长度。
应当理解,在其他示例中,线组件400的间隙构件416可以具有替代构造。例如,间隙构件416可以沿着线402不规则地间隔开和/或间隙构件416可以是单独地耦合到线402的单独元件。此外,在一些示例中,间隙构件416可以具有替代的形状和/或尺寸。
图9示出了间隙线组件400的另一个实施例,其中圆柱形间隙构件422耦合到导丝402。在该实施例中,医疗管100可包括一个或多个孔110,孔110在位于患者体内的医疗管100的一部分处延伸穿过其侧壁。圆柱形间隙构件422在医疗管110内同轴对齐,并且优选地具有与医疗管100的内径相当或略小的外径。在一些示例中,间隙线组件400可以沿着医疗管的轴线X朝向医疗管100的末端102平移,使得间隙构件422横穿一个或多个孔110并执行剪切作用,该剪切作用可以破坏积聚在孔110中或其附近的材料并暂时阻止材料通过孔110的转移。因此,从其粘附到医疗管100或其孔110的位置分离出的截断的材料可以通过其近端104从医疗管中抽出。然后可以(朝向医疗管100的末端102或近端104)平移间隙线组件400直到间隙构件110处于不阻塞孔110的位置,从而允许材料通过孔110恢复转移。
在一些示例中,作为平移间隙构件422的补充或替代,圆柱形间隙构件422可围绕医疗管的轴线X旋转,而间隙构件422位于具有孔110的医疗管100的部分处。在此类示例中,间隙构件422可包括孔(例如,狭槽)423,使得当间隙构件422旋转时,间隙构件400的孔423将周期性地与医疗管的孔110对准并允许液体通过孔110、423传送。
图10示出了间隙线组件400的另一个实施例,其中间隙构件424是在导丝402的末端102处耦合的大致圆盘,但是在其他示例中,间隙构件424可耦合到线402的其他部分。圆形间隙构件424在医疗管100内同轴对齐(尽管在一些示例中它可以是偏移的),并且优选地具有与医疗管100的内径相当或略小的外径。此外,圆形间隙构件424可以具有实心或穿孔的中心,其抑制或完全阻止材料通过圆形间隙构件424的传递。在一些示例中,该中心可以包括单向阀,该单向阀将允许材料在向管100的末端102平移期间通过其传递,以便不将材料推回到身体中。
圆形间隙构件424可以由环绕导丝402的一部分形成,以形成间隙构件424的圆形框架426。然后可以将填充材料428附接(例如,粘附或焊接)到圆形框架426,以塞住间隙构件424的中心。在其他示例中,圆形间隙构件424可以是与导丝402单独地形成的盘(例如,通过注塑、铸造、冲压等),并且然后附接到导丝402。
应当理解,在其他示例中,间隙构件424可具有替代构造。例如,间隙构件424可以具有基本上更小的直径和/或可以是单独地耦合到线402的单独元件。此外,在一些示例中,间隙构件424可以具有非圆形形状,诸如,例如方形或其他多边形。
图11A和11B示出了间隙线组件400的另一个实施例,其中呈珠子形式的间隙构件432耦合到导丝402。珠子432包括外表面434,该外表面434的横截面是圆形的并且具有沿着珠子432的长度变化的直径。特别地,直径在珠子432的中心处最大并且在珠子432的近端和末端处最小。优选地,珠子432在其中心处的直径与医疗管100的内径相当或略小于医疗管100的内径,从而在珠子432和医疗管100的内部之间的中心处形成界面。通过改变珠子432沿其长度的直径,可以减小珠子432接合医疗管内表面的表面区域(与具有相同长度并且具有与医疗管100的ID相当的恒定直径的圆柱形构件相比),并且可以减轻珠子432和医疗管100之间的摩擦。然而,在一些示例中,珠子432可具有沿其长度恒定的直径。在优选实施例中,在珠子432和医疗管100的内径之间存在微小间隙,使得液体将部分地由于珠子432和医疗管100之间的界面处的表面张力效应而被传送。
珠子432可耦合到线402的末端或线402的一些其他部分。此外,珠子432可以与线402一体形成,或者珠子432可以单独形成然后附接到线402。在所示的示例中,珠子432包括与医疗管的轴线X对齐(例如,平行)的通孔436,并且珠子432耦合到线402,使得线402的一部分穿过通孔436。通过将珠子432直接模制到线402上或者通过将珠子432与线402分开模制然后通过通孔436将线402插入来耦合珠子432。
在一些示例中,珠子432可包括与医疗管的轴线X对齐(例如,同轴)的通孔438,并允许材料(例如,血液或其他体液)由于线组件400通过医疗管100的平移而通过珠子432进行传递或者静止。这可以减轻在平移期间施加到珠子432的阻力。这也可以用于允许材料在医疗管100的任何部分中静止时通过珠子432自由流动。尤其是当它在平移的时候,它还可以用于平衡珠子432的远侧和近侧上的压力。尽管液体可以自由地流过孔438,但是当珠子432通过医疗管100致动时,围绕孔438的珠子432的本体部仍然可以提供间隙功能。在一些示例中,单向阀门可设置在孔438内,该单向阀门将在珠子432前进期间打开并且在珠子432通过医用管100缩回期间闭合。
在一些实施例中,珠子432可相对于其外径具有相对大的通孔432,使得珠子432变成薄壁构造,如图11C所示。
在其他示例中,珠子432可以是基本上固体,以便不允许材料通过珠子432转移。在此类示例中,珠子432仍然可以包括上面讨论的用于将珠子432耦合到线402的通孔436。优选地,通孔436配合到线402,使得通过孔436的液体连通基本上被孔436内的线402的存在所抑制。
在一些示例中,珠子432可具有裙部438,裙部438从珠子432的主体部的本体部延伸,如图11D所示。裙部438可以由柔性材料制成,诸如弹性体或金属丝网。该裙部438可以接合医疗管100的内径,以产生刮板效果,使得液体碎屑与珠子432沿着管100移动。在其他实施例中,裙部438可附接到其他间隙构件或直接附接到导丝402。
在一些实施例中,一个或多个珠子432可以耦合到线402,如图11E所示。此外,一个或多个珠子432可以与其他间隙构件构造组合地耦合。在一个实施例中,确定医疗管100的末端102和医疗管100中的任何穿孔的尺寸,使得珠子432无法通过末端102或穿孔逃离医疗管100。特别地,医疗管100的末端102可以逐渐变细到更小的直径,或者可以包括比珠子432足够小的尖端,以防止其离开管100的末端102。另一个示例性珠子432示于图11F中。
图12A示出了间隙线组件400的另一个实施例,其中间隙线组件400是传送环的形式,其延伸通过医疗管100的通道106并且可以以传送器运动的方式移动或循环。在该实施例中,间隙线组件400包括传送带440(例如,导丝402)和位于医疗管100内的一个或多个滑轮442,或者液体系统10的一些其他部分,带440可围绕该滑轮44缠绕,以产生其迂回、永无止境的旅行路径。带440可以是线或者单丝。此外,带440可以是带状的,使得带440具有矩形横截面。或者,带440可以是线形的,使得带440具有圆形横截面。线组件400可移动,使得带440围绕带轮442连续或间歇地传送。此外,线组件400可移动,使得带440始终在相同方向(例如,顺时针方向)或在交替方向(例如,先顺时针然后逆时针)上传送。
图12A中的传送器型线组件400可包括一个或多个耦合到带440的间隙构件444,当带440沿着其迂回路径包围带轮442时,该间隙构件444可以沿着上述迂回路径通过通道106传送。间隙构件444可彼此间隔开大约一英寸,但是在其他示例中其他距离是可能的。此外,间隙构件444可以是球形的或者可以包括其他形状,诸如,例如扁盘、半球或杯状。例如,图12A中所示的间隙构件444包括连接到带440的球形珠。在另一示例中,如图12B所示,间隙构件444可包括杯部,其中每个杯部444布置成使得其开口指向杯部的行进方向。
图13示出了间隙线组件400的另一传送器型实施例,其中线组件400类似地包括如上所述的带440和间隙构件444。在该实施例中,医疗管100具有两个将位于患者体外的近端部分114和将位于患者体内的末端部分116。末端部分116将连接两个近端部分114,以形成穿过患者的连续环118的一部分。此外,远端部分116可包括一个或多个孔120,用于在医疗管100和患者身体之间转移材料。医疗管100可以在两个分开的位置穿透患者的身体,使得末端部分116可以位于患者体内。或者,相同的切口部位可以用于管100的两端。
图13中的间隙线组件400的带440可在相同方向或交替方向上连续或间歇地围绕连续环118输送。
从上述显而易见的是,间隙线组件400可以具有各种不同的构造,其中任何构造都可以通过医疗管100致动(例如,可移动),以便于破坏积聚在医疗管内的材料。现在参考图14-22,现在将描述各种驱动系统,其可以促进间隙线组件400以上述方式移动。
如图14和15所示,在一些实施例中,液体系统10可包括磁性驱动系统500,其可操作,以致动间隙线组件400。一种由磁性驱动系统500提供的致动形式是间隙线组件400沿着医疗管100的轴线X往返穿过医疗管100的平移。另一种由磁性驱动系统500提供的致动形式是医疗管100内的间隙线组件400围绕轴线X的旋转。磁性驱动系统500可以对应于美国专利号:7,951,243中公开的间隙设备,其内容作为展示B附于本文中并且其全部内容通过引用并入本文。
磁性驱动系统500包括引导管510,引导管510具有末端512,该末端512流动地耦合到医疗管100的近端104,和近端514,该近端514流动地耦合到抽吸源,诸如,例如图2中所示的排水组件200的容器202。引导管510限定引导管通道516和外圆周518。
驱动系统500还包括磁性引导件530,磁性引导件530具有一个或多个第一磁性元件532,该第一磁性元件532固定地耦合到间隙线组件400的导丝402。第一磁性元件532可以是永磁体,诸如,例如钕磁铁(N5-N52)。或者,第一磁性元件532可以是具有磁性的金属元件,其不一定是永磁体。如本文所用,如果金属元件能够通过磁力被永磁体吸引,则其具有磁性。
驱动系统500还包括梭构件540,该梭构件540设置在引导管的外圆周518上并且优选地与引导管510的外圆周518接触。梭构件540具有通孔,优选地,该通孔具有与外周518基本对应的直径,使得梭构件540可以沿着引导管510的长度可滑动且平滑地平移,其中引导管510通过其孔容纳。梭构件540包括一个或多个嵌入或封闭在梭外壳544内的第二磁性元件542。可选地,第二磁性元件542可形成外壳544的全部或一部分。或者,梭构件540可仅由第二磁性元件542组成。在所示实施例中,第二磁性元件542以环的形式设置,其中引导管510穿过每个所述环的中心处的开口。与如上述的第一磁性元件532一样,第二磁性元件可以是永磁体或具有磁性的金属元件,其不一定是永磁体。可以使用镍、金、环氧树脂、PTFE、聚对二甲苯或其他金属、合金、聚合物或其组合来涂覆或电镀该磁体。涂层可用作阻挡层,以防止磁体材料的降解,防止金属从磁体中浸出,提供生物相容性和/或抗血栓表面和/或提供低摩擦表面,用于在引导管上滑动。
磁性引导件530的第一磁性元件532和第二磁性元件542和梭构件540相对于彼此磁性地对准,以在第一磁性元件532和第二磁性元件542之间产生磁力,该磁力通过引导管510的壁,以将梭构件540磁性地耦合到磁性引导件530。因此,沿引导管510的长度滑动或平移梭构件540引起磁性地耦合到其上的磁性引导件530的相应平移运动,以及固定地耦合到磁性引导件530的导丝402的相应平移运动。因此,梭构件540可以沿着引导管510平移,以使间隙线组件400的导丝402移动穿过医疗管100。此外,梭构件540管的旋转可以提供间隙线组件400的旋转。
优选地,第一磁性元件532和第二磁性元件542相对于引导管510的纵向轴线具有轴向对齐的南北极性,但在一些示例中,第一磁性元件532和第二磁性元件542可以具有径向对齐的南北极性。已经发现,具有轴向对齐极性的磁体可以在第一磁性元件532和第二磁性元件542之间提供合适的吸引力,以在将梭构件540沿管510长度平移的同时保持磁性引导件530和梭构件540串联,而不会过度增加当它们沿管510平移时摩擦。
在一些示例中,驱动系统500还包括末保持构件526a和近保持构件526b,该末保持构件526a和近保持构件526b固定地耦合到磁性引导件530的相对侧上引导线402。末保持构件526a和近保持构件526b的尺寸优选地使得它们不能分别穿过引导管510的末端512和近端514,从而将磁性引导件530和引导线402的相关区域保持在引导管510内。因此,末保持构件526a和近保持构件526b可以限制由导丝402穿过医用管100可平移的距离。此外,在一些示例中,驱动系统500可包括一个或多个梭止动件550,其耦合到引导管510的外圆周518,可以防止梭构件540平移超过梭止动件550,并从而抑制导丝402进一步穿过医疗管100的平移。
驱动系统500的梭构件540可直接用手或用单独的驱动机构沿着引导管510平移。例如,如图16所示,驱动系统500可包括导螺杆562和电动机564,电动机564可操作,以旋转导螺杆562。在该示例中,梭构件540可包括耦合部分566,该耦合部分566具有至少部分地穿过其延伸的螺纹孔,该螺纹孔可螺纹地容纳导螺杆562。当操作当电动机564以旋转导螺杆562时,梭构件540将沿着导螺杆562平移并因此沿着驱动系统500的引导管510平移,从而移动间隙线组件400的导丝402。平移方向将取决于导螺杆562的旋转方向。优选地,电动机564可操作,以使导螺杆562沿顺时针和逆时针方向旋转,使得电动机564可操作,以使间隙线组件400的导丝402向前和向后移动。导螺杆可以是标准螺纹杆,并且可以具有通常用于导螺杆的螺纹设计,诸如爱克姆螺纹。
在一些示例中,一个或多个电磁线性致动器可耦合到梭构件540,沿着引导管510以线性运动方式使梭构件540平移。此类致动器在本领域中通常是已知的,并且可耦合到如图17中所示的梭构件540。在该示例中,驱动系统500包括具有巢568的托架566,梭构件540容纳在巢568中。巢568可使用多个机械配合,诸如,例如可释放的搭扣配合、滑动配合、过盈配合或压缩配合容纳梭构件540。或者,托架566可具有一个或多个柱,每个柱配合到梭构件540上的相应的凹形配件中,反之亦然。可以使用用于将梭构件540机械地固定到托架566的其他装置,诸如,例如皮带、拉链带、夹具或至少部分地包围梭构件540的外壳。或者,托架566可具有诸如永磁体或者电磁体的磁性元件,该磁性元件直接耦合到磁性引导件530,从而消除了对梭构件540的需要。托架566可耦合到线性致动器(例如,是其一部分)并且能够由线性致动器致动,以导致间隙线组件400在引导管510内的平移,并且因此导致间隙构件在医疗管100内部的平移。例如,托架566可以耦合到致动器570,该致动器570具有导螺杆572或者由电动机旋转以驱动托架566的球。电动机可以是DC或AC电动机。它可以是步进电机或伺服电机。托架566还可耦合到皮带驱动致动器,其中托架566安装在处于张紧状态并由电动机驱动的皮带上。托架566可具有沿着轨道行进的轴承。此类系统可以采用编码器和/或限位开关(诸如接近开关、簧片和/或霍尔效应传感器)和适当的控制系统,以在两个或更多个位置之间致动托架566,从而导致医疗管100内的间隙构件致动。
仍然在其他示例中,托架566可以耦合到一个或多个气动致动器,以沿着引导管510以线性运动方式致动托架566和梭构件540。
仍然在其他示例中,驱动系统500可包括蜗杆驱动机构,其中正齿轮通过电动机旋转。正齿轮可以螺纹接合相对于梭构件540固定的导螺杆,使得正齿轮的旋转将使导螺杆平移穿过正齿轮并因此使梭构件540沿着引导管510以线性运动方式平移。
磁性驱动系统500可包括各种不同的驱动机构,其可操作,以沿着引导管510平移梭构件540并因此使间隙线组件400的引导线402平移穿过医疗管100。此外,如上讨论的任何驱动机构可以可操作地连接到控制系统,诸如,例如上述控制系统300,以自动控制驱动机构。特别地,控制系统300的控制器302可以可操作地耦合到驱动机构的致动器/电动机,并且可构造成根据特定程序和/或响应于由控制系统300的传感器306检测到参数选择性地操作致动器/电动机。
参照图18,在一些实施例中,液体系统10可包括感应电动机驱动系统600,其可操作,以使间隙线组件400在医疗管100内旋转。感应电动机驱动系统600包括设置在管部分632内的转子630,在本示例中,对应于医疗管100的一部分。在其他示例中,管部分632可对应于引导管或一些其他管,其流动地耦合到医疗管100的近端104。转子630固定地耦合到间隙线组件400的导丝402,使得转子630的旋转将使导丝402的部分固定地与其耦合,以与转子630一起旋转。在所示的示例中,转子630固定地耦合到导丝402的近端,但在其他示例中,转子630可固定地耦合到导丝402的更末端部分。转子630可以是卷绕型或鼠笼式转子。
感应电动机驱动系统600还包括梭构件640,梭构件640设置在管部分632的外圆周上,其中转子630位于其中。梭构件640包括嵌入或封闭在梭外壳644内的定子642,优选地,与管部分632略微间隔开,使得在定子642和转子630之间将存在气隙。在一些示例中,梭构件640可仅由定子642组成。
梭构件640的定子642与管部分632内的转子630对准,使得当AC电流穿过定子642的绕组时,将产生旋转磁场,其导致管部分632内的转子630旋转,进而使导丝402与其固定耦合的部分旋转。可以通过调节提供给定子642的AC电流的频率来调节旋转速度。
感应电动机驱动系统600的定子642可以可操作地连接到电源(例如,控制器),该电源被构造成选择性地向定子642提供AC电流。例如,定子642可以可操作地连接到上述控制系统300的控制器302,该控制器302可选择性地向定子642提供AC电流,以选择性地操作感应电动机驱动系统600并以上述任何方式旋转间隙线组件400。特别地,控制器302可被构造为根据特定程序和/或响应于由控制系统300的传感器306检测到的参数来选择性地操作感应电动机驱动系统600。
在一些示例中,感应电动机驱动系统600可被构造为类似于磁性驱动系统500,使得感应电动机驱动系统600的梭构件640可以沿着管部分632平移,以平移医疗管100内的导丝402。在此类示例中,感应电动机驱动系统600的梭构件640同样可以手动驱动或者由上述结合磁性驱动系统500的任何驱动机构驱动。
转到图19A-E,在一些实施例中,液体系统10可包括线轴驱动系统700,其可操作,以平移医疗管100内间隙线组件400。在一些示例中,线轴驱动系统700可对应于美国专利申请公开号:2015/0231313中公开的间隙装置,其内容作为展示C附于本文中,其全部内容通过引用并入本文。在一个示例中,如图19A-D所示,线轴驱动系统700包括具有入口704的线轴外壳702,入口704可耦合到医疗管100的近端104。线轴外壳702包括第一部分706和第二部分708,其可以耦合在一起(例如,通过紧固件、焊接、粘合剂等),以形成外壳。线轴外壳702内存在可绕轴线旋转的线轴710。此外,线轴外壳702限定轨道712,该轨道712与线轴710间隔开并且至少部分地围绕线轴710的周边延伸,遵循与线轴710基本相似的曲率线。
间隙线组件400的导丝402可通过线轴外壳702的入口704进给并且(例如通过固定螺钉、粘合剂、压配等)耦合到线轴710,使得线轴710围绕线轴的轴线的旋转引起导丝402围绕线轴710缠绕或展开并在前进状态和缩回状态之间移动。在一些实施例中,导丝402的末端可定位在医疗管100内。如果线轴710沿一个方向旋转,则导丝402将围绕线轴710缠绕,从而引起导丝402(和与其耦合的任何间隙构件)远离医疗管100的末端102平移(即,缩回)。相反,如果线轴710沿相反方向旋转,则导丝402将围绕线轴710展开,引起导丝402(和与其耦合的任何间隙构件)朝向医疗管100的末端102平移(即,前进)。因此,线轴710的旋转可以控制医疗管100内线组件400的平移(致动)。
当线轴710旋转时,线轴外壳702的轨道712将有助于将导丝402引导到线轴710上或从线轴710引出。此外,轨道712可有助将导丝402保持在缠绕状态并且防止导丝402由于导丝402的坚硬而展开。然而,来自轨道712的摩擦可以提供对导丝402的阻力,在一些示例中,可以基本上阻止导丝402在线轴710上或从线轴710上脱开的缠绕或展开。因此,轨道712可包括一个或多个可有助于减小由轨道712施加到导丝402的摩擦的方面。
例如,在所示的示例中,轨道712包括凹槽表面714,该凹槽表面714至少部分地围绕线轴710的周边延伸,并且包括凹槽716,该凹槽716围绕线轴710周向间隔开。轨道712的凹槽716将减小轨道712接合导丝402的表面积(与具有非凹槽表面的轨道712相比),从而减小了由轨道712施加到导丝402的摩擦量。
在另一个示例中,表面712将包括脊(与凹槽相对),该脊围绕线轴710周向间隔开。轨道712的脊将接触导丝712(与整个轨道表面相对),从而减小了轨道712接合导丝402的表面积和由轨道712施加到导丝402的摩擦量。
在一些示例中,轨道712可包括轮子720,该轮子720围绕线轴710周向间隔开并将可旋转地接合导丝402,如图19E所示。轮子720的可旋转接合可以提供比其他示例中导丝402接合刚性表面更小的阻力。在此类示例中,轮子720可以利用弹簧或其他偏置结构朝向线轴710偏置,以有助于保持轮子720与导丝402的接合。
同样在一些示例中,轨道712的一个或多个部件可包括低摩擦材料或涂覆有低摩擦材料,诸如,例如亲水涂层、水凝胶、聚对二甲苯、PTFE、FEP、低摩擦聚合物或低摩擦硅树脂。例如,上述的凹槽表面714和/或轮子720可包括或涂有此类低摩擦材料。或者轨道可以具有由此类材料构成的衬里,例如,不锈钢薄板(或扁平线)的薄带可涂覆有PTFE并且与外壳安装(耦合),以形成与线相互作用的轨道表面。带可以通过各种方式诸如粘合剂,夹具固定就位,或者它可以由弹簧回火钢制成并通过弹簧张力固定在外壳上。它也可以通过其他方式保持就位。
在一种构造中,轨道712由包含在内座圈和外座圈内的滚珠轴承组成。在该实施例中,线与滚珠轴承接合,允许线的低摩擦运动。
在一些示例中,线轴驱动系统700可包括电动机722,该电动机722可操作,以使线轴外壳702内的线轴710旋转并引起医疗管100内的线组件440的平移。如图19D所示,电动机722可以布置在线轴外壳702的外部,并且可以通过传动机构724可旋转地耦合到线轴外壳702内的线轴710。在所示的实施例中,传动机构724包括固定到电动机722的轴728的第一锥齿轮726和固定到线轴710的轴732的第二锥齿轮730,第二锥齿轮730螺纹接合第一锥齿轮726。然而,传动机构724可包括其他示例中的齿轮和轴的其他类型和/或组合,以将电动机722可旋转地耦合到线轴710。的确,在一些示例中,传动机构724可简单地由电动机722和线轴710共用的轴组成。
传动机构724的一部分(例如,线轴710的轴732)将穿过线轴外壳702中的孔736(图19B中所示)。在一些示例中,可设置密封件,该密封件可允许传动机构724穿过孔736,同时抑制液体和其他材料穿过孔736转移。因此,可以相对于线轴外壳702外部的环境保持线轴外壳702内的无菌区。此外或替代地,线轴驱动系统700可包括电动机外壳740(图19A-B中所示),其可耦合到线轴外壳702(例如,通过紧固件),以包围电动机722和传动机构724。电动机外壳740可以相对于线轴外壳702密封,以在电动机722和传动机构724周围提供无菌环境,传动机构724与电动机外壳740外部的环境密封。
在一些示例中,电动机722可以是电池供电的。此外,电动机722可以可操作地连接到上述控制系统300的控制器302,该控制器302可以选择性地操作电动机722,以便以上述任何方式平移间隙线组件400。特别地,控制器302可以被构造为根据特定程序和/或响应于由控制系统300的传感器306检测到的参数来选择性地操作电动机722。此外,控制系统300和控制器302可至少部分地位于电动机外壳740内,如图19B所示。
线轴外壳702可能通过密封件与血液通道分离,该密封件允许在液路中保持真空。线轴外壳702可能需要是无菌的,具有从电动机外壳保持无菌的密封件。密封件还可以维持压力作为抵抗失压的安全(备用)设备。密封件可采用各种形式,诸如橡胶密封件或焊接。在旋转轴或平移线穿过密封件的情况下,它需要是适当类型的密封件。在替代实施例中,电动机外壳740可以可拆卸地耦合到线轴外壳702,使得它可以重复使用并且线轴外壳702被丢弃。
转到图20,在上述线轴驱动组件700的变型中,用滚轴750代替线轴710,用盘管752代替轨道712。在该示例中,线轴驱动组件700具有带有切口区756的入口管754并且滚轴750设置在切口区756内并且可相对于线轴外壳702旋转。间隙线组件400的导丝402可以通过线轴外壳702的入口704进给,使得导丝402的一部分将位于滚轴750的外圆周和入口管754的内表面之间(并且优选地接合)。滚轴750然后可以沿着一个方向(例如,逆时针方向)旋转,以拉动导丝402近侧地(即远离患者)穿过滚轴750和入口管754的内表面之间的空间,从而引起导丝402穿过医疗管100缩回。或者,滚轴750可以是沿着相反方向(例如,顺时针方向)旋转,以推动导丝402远侧地(即,朝向患者)穿过滚轴750和入口管754的内表面之间的空间,从而引起导丝402穿过医疗管100前进。使用上述电动机722和控制系统300,可以类似于线轴710旋转滚轴750。
当盘管752被滚轴750近侧地拉动到线轴外壳702中时,盘管752将容纳导丝402。盘管752可由低摩擦材料制成。可以使用各种聚合物,诸如PTFE、FEP或其他低摩擦聚合物。然而,应当理解,管752在其他示例中可以具有其他构造,诸如,例如直线构造。此外,在一些实施例中,盘管752可与线轴外壳702成一体。
转到图21,在一些实施例中,液体系统10可包括传送器驱动系统800,该传送器驱动系统800可操作,以传送例如上述结合图12A-B的传送器型线组件400。传送器驱动系统800包括输送管802,输送器管802具有末端804,该末端804耦合到医疗管100的近端104的和近端806,该近端806流动地耦合到抽吸源,诸如,例如图2中所示的排水组件200的容器202。线组件400的近端处的滑轮442位于传送器管802内,并且布置成使得滑轮442的旋转轴线与传送器管802的中心轴线相交并垂直于传送器管802的中心轴线。
传送器驱动系统800包括布置在传送器管802外部的电动机812,电动机812经由传动机构814可旋转地耦合到传送器管802内的滑轮442。在所示实施例中,传动机构814包括第一锥齿轮816,其固定到电动机812的轴818,和第二锥齿轮820,其固定到滑轮442的轴822,第二锥齿轮820螺纹接合第一锥齿轮816。然而,在其他示例中,传动机构814可包括齿轮和轴的其他类型和/或组合,以将电动机812可旋转地耦合到滑轮442。的确,在一些示例中,传动机构814可以简单地由电动机812和滑轮442共用的轴组成。
传动机构814的一部分(例如,滑轮442的轴822)将穿过传送器管802中的孔826。在一些示例中,可以提供密封件,以允许传动机构814穿过孔826,同时抑制液体和其他材料穿过孔826转移。因此,传送器管802内的无菌区可相对于传送器管802外部的环境得以保留。此外或可替代地,驱动系统800可包括将包围电动机812和传动机构814的外壳830。外壳830可具有传送器管802可延伸穿过的密封的入口834和密封的出口836,使得传送器管802的一部分穿过传动机构814也封闭在外壳830内。因此,外壳830可在电动机812、传动机构814和传送器管802周围提供无菌环境,传送器管802与外壳830外部的环境密封。
驱动系统800的电动机812可被操作,以使滑轮442在传送器管802内旋转,这又将导致线组件440围绕滑轮442的传送。在一些示例中,滑轮422可包括围绕其周边的齿,当滑轮422旋转时,齿将接合线组件400的带440和/或间隙构件444,以便于线组件400的传送。在其他示例中,滑轮422可简单地包括光滑的圆周表面,并且线组件400将围绕圆周表面张紧,使得滑轮422的旋转将通过线组件400和圆周表面之间的摩擦来传送线组件400。
电动机812可被操作,使得线组件400的带440围绕滑轮442连续或间歇地传送。此外,电动机812可被操作,使得带440始终在相同方向上(例如,顺时针方向)或交替方向(例如,先顺时针方向然后逆时针方向)上传送。在一些示例中,电动机812可以可操作地耦合到上述控制系统300的控制器302,控制器302可选择性地操作电动机812,以以上述任何方式传送间隙线组件400。特别地,控制器302可被构造为根据特定程序和/或响应于由控制系统300的传感器306检测到的参数来选择性地操作电动机812。
在一些示例中,传送器驱动系统800将包括位于传送器管802内的一个或多个刷子838,当带440围绕滑轮传送时,刷子838将接合间隙线组件400的间隙构件444和/或带440。这可有助于清洁间隙线组件400并移除可能在间隙线组件400上收集的任何材料。刷子838可以是肝素涂覆的。
图22A和22B示出了另一示例传送器驱动系统800,其可操作,以传送例如上述结合图13的传送器型线组件400。传送器驱动系统800包括具有两个端口854的外壳852,每个端口854流动地耦合到医疗管100的两个近端部分114中的一个。外壳852还可包括第三端口856,该第三端口856流动地耦合到抽吸源,诸如,例如图2中所示的排水组件200的容器202。布置在外壳852内的驱动系统800还可包括可旋转的链轮齿858。此外,外壳852可以限定轨道862,轨道862围绕链轮齿858的周边部分地(例如,一半)延伸并且与链轮齿858同轴。
外壳852和医疗管100一起将形成连续环118,线组件400的带440被传送到该连续环118。更具体地,带440将延伸穿过医疗管100,穿过两个端口854进入外壳852,并沿着轨道862缠绕在链轮齿858上。
传送器驱动系统800包括布置在外壳852外部的电动机866(图22B中所示),电动机866经由传动机构868可旋转地耦合到外壳852内的链轮齿858。在所示实施例中,传动机构868包括电动机866和链轮齿858共用的轴。然而,在其他示例中,传动机构868可包括额外的齿轮和/或轴,以将电动机866可旋转地耦合到链轮齿858。
传动机构868的一部分将穿过外壳852中的孔870。优选地,可设置提供密封件,该密封件可允许传动机构868穿过孔870,同时抑制液体和其他材料穿过孔870转移。因此,可以相对于外壳852外部的环境保持外壳852内的无菌区。
驱动系统800的电动机866可被操作,以旋转外壳852内的链轮齿858,这又将导致线组件400围绕链轮齿858的传送。在本示例中,链轮齿858包括主轴872,当链轮齿858旋转时,主轴872将接合线组件400的间隙构件444,以便于线组件400的传送。在其他示例中,链轮齿858可包括围绕其周边的齿,当链轮齿858旋转时,该齿将与线组件400的带440和/或间隙构件444接合,以便于线组件400的传送。在其他示例中,链轮齿858可以简单地包括光滑的圆周表面,并且线组件400将围绕圆周表面张紧,使得链轮齿858的旋转将通过线组件400和圆周表面之间的摩擦来传送线组件400。
电动机866可被操作,使得线组件400围绕链轮齿858连续或间歇地传送。此外,电动机866可被操作,使得带440始终在相同方向(例如,顺时针方向)或在交替的方向(例如,先顺时针然后逆时针)上传送。在一些示例中,电动机866可以可操作地连接到上述控制系统300的控制器302,控制器302可以选择性地操作电动机866,以以上述任何方式传送间隙线组件400。特别地,控制器302可以被构造为根据特定程序和/或响应于由控制系统300的传感器306检测到的参数来选择性地操作电动机866。
可利用上述的各种驱动系统500,600,700,800,以根据上述一种或多种方式移动医疗管100内的间隙线组件400。特别地,驱动系统500,600,700,800均可用于平移、旋转和/或传送医疗管100内的间隙线组件400。此外,驱动系统500,600,700,800可以可操作地耦合到控制器,诸如,例如上述控制系统300的控制器302,以便自动控制医疗管100内的间隙线组件400的移动。优选地,驱动系统500,600,700,800可以被构造(例如,尺寸和形状),以便手持并且在一些示例中是一次性的。如果驱动系统是电动的,则可以使用可充电电池为电动机供电。此外,在一些示例中,电动机可以由动力组件供电,该动力组件与驱动系统的主体分离并且经由接线连接到主体,如图23所示。通过分离动力组件,可以更换/再充电动力组件,而不必拆卸驱动系统的主体。
对于其中液体系统10具有驱动系统(例如,驱动系统500,600,700,800中的一个)的实施例,该驱动系统被构造成沿着医疗管100的通道106平移或传送间隙线组件400,驱动系统可被构造为允许由间隙线组件400平移/传送的距离的校准。例如,图24示出了示例性线轴驱动系统700,其构造成沿着医疗管100的通道106平移间隙线组件400。线轴驱动系统70可被操作,以使间隙线组件400朝向医疗管的末端102前进,直到间隙线组件400到达希望处于完全前进位置的位置。例如,线轴驱动系统700可被操作,以使间隙线组件400朝向医疗管100的末端102前进,直到间隙线组件400的末端到达医疗管100的末端102。间隙线组件400的位置可以使用各种装置来检测,诸如通过步进电机、霍尔传感器、光学编码器等的计算步骤。然后可由用户接合(例如,按下)按钮、开关、触摸屏或一些其他结构,以将信号发送到控制器(例如,控制器302),指示间隙线组件400处于完全前进位置。然后,控制器可将该位置存储在存储器中,以校准驱动系统700的完全前进位置。
类似地,线轴驱动系统700可被操作,以使间隙线组件400朝向医疗管100的近端104缩回,直到间隙线组件400到达期望为完全缩回位置的位置。例如,线轴驱动系统700可被操作,以使间隙线组件400朝向医疗管100的近端104缩回,直到间隙线组件400的末端靠近医疗管100末端部分中的一组孔110。间隙线组件400的位置可以使用各种装置来检测,诸如通过步进电机、霍尔传感器、光学编码器等的计算步骤。然后可由用户接合(例如,按下)按钮、开关、触摸屏或一些其他结构,以将信号发送到控制器(例如,控制器302),指示间隙线组件400处于完全缩合位置。然后,控制器可将该位置存储在存储器中,以校准驱动系统700的完全缩合位置。
一旦校准完全前进位置和完全缩回位置,控制器就可操作驱动系统700,使得间隙线组件400在医疗管100内在完全前进位置和完全缩回位置之间平移。
应当理解,上述的任何驱动系统500,600,800也可以类似地校准为图24中所示的驱动系统700。此外,在一些示例中,驱动系统500,600,700,800可被构造为自动校准,而无需用户指示间隙线组件400何时已经到达完全前进位置和/或完全缩回的位置。例如,在一些示例中,每个驱动系统500,600,700,800可包括一个或多个传感器(例如,传感器306),其可以检测其相关的间隙线组件400何时已经到达完全前进的位置和/或或者完全缩回的位置并向其相关的控制器发送信号,指示线组件的位置,使得控制器可以将位置存储在存储器中并校准驱动系统。
现在转向图25,将描述Y形耦合器900,其可用于将医疗管100耦合到各种结构,诸如,例如上述的驱动系统500,600,700,800。Y形耦合器900包括具有端部904a的第一管部分902a,端部904a可流动地耦合到医疗管100的近端104。Y形耦合器900还包括具有端部904b的第二管部分902b,端部904b可流动地耦合到抽吸源,诸如,例如图2中所示的排水组件200的容器202。此外,Y形耦合器900还包括具有端部904c的第三管部分902c,端部904c可耦合到另一结构,诸如,例如上述的驱动系统500,600,700,800之一的入口或端口。例如,图19A示出了Y形耦合器900,其中端部904c耦合到上述的线轴驱动系统700。
Y形耦合器900限定通道910,其提供第一管部分902a的端部904a和第二管部分902的端部904b之间的液体连通。因此,通道910可以提供材料从医用管100吸出并排出到抽吸源的路径。
Y形耦合器900还包括孔912,孔912延伸穿过第三管部分902c并通向通道910。确定孔912的尺寸,以允许间隙线组件400的导丝402穿过孔912。因此,当医疗管100连接到Y形耦合器900时,导丝402可以从医疗管100内延伸,穿过Y形耦合器900,并进入任何耦合到Y形耦合器900的端部904c的结构中。
在一些示例中,孔912的至少一部分(例如,部分912a)的直径略大于导丝402的直径。这将允许导丝402穿过孔912但抑制液体(例如,体液)和其他材料穿过孔912。通过抑制液体和其他材料穿过孔912,可保持通道910内的真空(和与之液体连通的医疗管100)通道910)并隔离与第三管部分902c的端部904c连通的任何加压环境。此外,可以抑制穿过通道910的液体(例如,体液)和其他材料穿过孔912进入耦合到第三管部分902c的端部904c的任何结构。
另外或可替代地,在一些示例中,一个或多个圆柱形套管914可设置在孔912内,导丝402可穿过该孔912。每个套管914可包括例如迭尔林(Delrin)、陶瓷、不锈钢、PEEK、PTFE、闭孔聚氨酯泡沫、填充纤维和/或其他材料。
另外或可替代地,在一些示例中,一个或多个圆柱形擦拭器可设置在孔912内,以抑制液体(例如,体液)和其他材料穿过孔912。例如,圆柱形擦拭器916可设置在孔912内,导丝402可穿过该孔912。擦拭器916优选地包括多孔材料,该多孔材料可吸收试图通过导丝402穿过擦拭器916的任何液体。例如,擦拭器916可以包括泡沫,诸如开孔或闭孔聚氨酯泡沫、聚乙烯泡沫、亲水泡沫、水凝胶、聚酯编织等。在其他实例中,擦拭器916可包括硅橡胶薄膜。
另外或可替代地,在一些示例中,一个或多个圆柱形润滑器918可设置在孔912内,其将在导丝402穿过润滑器918时润滑导丝402。每个润滑器可以包括例如,医用级硅油、肝素溶液、PTFE润滑剂、矿物油、凡士林等。
另外或可替代地,在一些示例中,一个或多个阀920可设置在孔920内,其可以被致动,以选择性地打开和关闭通过孔912的液体连通。
在所示的示例中,Y形耦合器900包括上述较小直径部分912a、套管914、擦拭器916、润滑器918和阀20的组合。在此类示例中,这四个元件优选地布置成使得较小直径部分912a远离套管914,套管914远离擦拭器916,擦拭器916远离润滑器918,并且润滑器918远离阀920,尽管在其他示例中,这些元件的其他布置和/或组合也是可能的。
另外,密封件可用在液路910和通道912的接合处,以限制或消除液体和碎屑进入通道。密封件可以是弹性体垫圈,诸如圆顶形狭缝阀或扁平密封件,其允许导丝以及一些构造中的间隙构件通过。
转到图26,在一些示例中,Y形耦合器900包括孔912内的刷毛920,当其平移穿过孔912时,该刷毛920将从导丝402机械地移除材料(例如,凝块)。在关闭真空源时发生材料的去除,以促使此类材料朝排水罐移除。可设置阀,以将刷毛920与流路分开,以防止血凝块聚集在刷毛920上。
图27示出了另一个示例性Y形耦合器900,其具有与导丝402紧密配合的孔912,孔912用于从导线上刮掉大的血凝块和碎屑,其具有套管914,套管914可以是刚性材料(例如,迭尔林(Delrin)、聚碳酸酯等)或者诸如硅橡胶之类的弹性材料提供密封,以分离可能处于真空下的液路和可能处于大气压力下的线轴房室,它还用于从线上擦除额外的血液和其他液体,以减少他们被带入线轴房室的可能。星形联接(y-junction)还可具有擦拭器916,擦拭器916可由开孔聚氨酯泡沫、亲水性泡沫或其他亲水性材料(例如水凝胶)或其他介质制成,其优选是多孔的。此外,通道910包括两个相互作用的线性通道(与图25和26所示的弯曲通道相对)。
现在转到图28,现将描述弹性体恢复特征可以促进间隙线组件400穿过医用管100的平移。更具体地,在一些示例中,医疗管100可包括在通道106内延伸的弹性构件120,其在其末端122处固定地耦合到医疗管100的一部分(例如,末端102)。弹性构件120可在其近端124处进一步固定地耦合到间隙线组件400的一部分(例如,导丝402)。弹性构件120可以构造成使得当间隙线组件400穿过医疗管100朝向其近端104缩回时,弹性构件120将由间隙线组件400拉伸。在该拉伸状态下,弹性构件120将使间隙线组件400朝向医疗管100的末端102偏置(例如,拉动)。来自弹性构件120的这种偏置可有助于保持间隙线组件400的导丝40在医疗管100内呈直线构型,特别是随后在间隙线组件400向后朝医疗管100的末端102前进的过程中。
现在转向图29,在一些示例中,医疗管100可包括锥形座123,其可促进可能积聚在间隙线组件400的间隙构件上的材料的破坏。锥形座128在通道106内从医用管100的末端102径向向内并沿近端方向延伸。在该实施例中,间隙线组件400包括呈环450形式的间隙构件。在使用过程中或者在使用之后,间隙线组件400可以朝向医疗管100的末端102前进,直到锥形座128突出穿过间隙构件环450,从而破坏可能积聚在环450内的任何材料。
如上所述,间隙线组件400可以在医疗管100内移动,以便于破坏积聚在医疗管100内的材料。优选地,医疗管100的内表面将涂覆有一层可以减小医疗管的摩擦性能的材料,从而减小医疗管100施加到间隙线组件400在医疗管100内的移动的任何阻力。可涂覆到医疗管100的内表面的示例材料是亲水涂层、水凝胶、PVP、聚对二甲苯C、聚对二甲苯N、PTFE、Pebax和低摩擦硅树脂。然而,在一些示例中,可能期望医疗管的内表面的一些部分不涂覆减摩层。
例如,如上所述,在一些示例中,医疗管100可流动地耦合到各种结构,诸如,例如上述的排水组件200和/或上述的驱动系统500,600,700,800。为了流动地耦合医疗管100,可以使用诸如,例如软管倒钩之类的配件,其可插入医疗管100的一端。然后医疗管100的端部可以收缩,以在配件和医疗管100之间提供液体密封。然而,如果将减摩剂施加到医疗管的内表面,其中医疗管100接合配件,则可能无法实现紧密的液体密封,并且配件可能脱离医疗管100。
因此,本发明的一个方面涉及一种将减摩剂施加到医疗管100的内表面上的方法,其中在施加药剂之前,医疗管的内表面的一部分(例如,一端或两端或其间的部分)将被遮盖。可以使用例如用粘合剂施加到表面部分的遮盖材料来遮盖内表面部分。或者,可以在医疗管100内插入圆柱形塞子,其具有外圆柱壁,其直径基本上与内表面的直径相匹配,并且长度对应于管ID的长度,其中希望不施加涂层。在一个示例中,塞子是可膨胀的并且可以由诸如橡胶的弹性材料制成。在另一示例中,塞子可具有O形环,该O形环接合并密封管的ID。在一个示例中,塞子是在其中心开口的管,用于气体或液体的通过,从而允许涂层从管的两侧进入。此类塞子可以阻挡由塞子接合的内表面部分暴露于药剂。一旦期望的内表面部分被遮盖,就可以将减摩剂(例如,聚对二甲苯)施加到医疗管100的内表面上,以涂覆未被遮盖的内表面的剩余部分。在施加药剂(并且在一些实例中,固化或干燥)之后,遮盖设备(例如,塞子)可从医疗管100移除。
上述方法可以制造具有内表面部分地涂覆有减摩剂的医疗管100,使得医疗管内表面的一个或多个部分(例如,一端或两端)未被涂覆该减摩剂。
应当理解,上述方法可类似地应用于医疗管100的外表面,以用减摩剂部分地涂覆外表面,特别地,使得医疗管的外表面的一个或多个部分(例如,一个或两个末端)未被涂覆该减摩剂。例如,可使用例如用粘合剂施加到表面部分的遮盖材料来遮盖外表面部分。或者,圆柱形环可以在医疗管100上滑动,该圆柱形环具有内圆柱壁,该内圆柱壁的直径基本上与外表面的直径相匹配,并且长度对应于管的OD的长度,其中希望不施加涂层。在一个示例中,环是可膨胀的并且可由诸如橡胶的弹性材料制成。在另一示例中,环可以具有O形环,该O形环接合并密封管的OD。此类环可以阻挡由环接合的外表面部分暴露于药剂。一旦期望的外表面部分被遮盖,减摩剂(例如,聚对二甲苯)就可施加到医疗管100的外表面上,以涂覆未被遮盖的外表面的剩余部分。在施加药剂(并且在一些实例中,固化或干燥)之后,遮盖设备(例如,塞子)可从医疗管100移除。
上述液体系统10可用于将材料输送到患者体内和/或通过所述的医疗管100从患者体内移除材料。在一些方面,液体系统10可构造成将治疗剂通过医疗管100输到患者。例如,液体系统10可包括输送系统,该输送系统流动地耦合到医疗管100的近端104并且构造成将治疗剂通过医疗管100输送到患者,诸如,例如控制在一定温度(如体温)的液体(例如,生理盐水)、抗炎药、抗心律失常药、感染药、心血管药、传染病控制药、抗炎药、癌症治疗药,促进胸膜固定术的药、止痛药或其任何组合。输送系统可以可操作地连接到控制系统(例如,控制系统300)的控制器(例如,控制器302),其可根据特定程序和/或响应于由控制系统的一个或多个传感器(例如,传感器306)检测的参数自动操作输送系统。在一个实施例中,跟踪插入的液体的精确体积并从排出的总体积中减去,使得排出的体积是已知的,并且已知所有液体是否随后被移除。如图30所示,在一个实施例中,除了主腔之外,体空间管还具有一个或多个额外的腔。该额外的腔用于在体空间管外部液体的施加,以便于用液体处理管周围的空间。在一个实施例中,液体包含在液体贮存器中,该液体贮存器是管间隙驱动机构或液体收集罐的一部分。在一个实施例中,液体由泵控制。在一个实施例中,通过施加到贮存器的压力施用液体,由液体限制或限制性阀控制,以维持向体空间管外部的体空间的稳定体积递送。在一个实施例中,补充管的腔是体空间引流管的精确长度。在另一实施例中,管可以在一个或多个方向上延伸到主管外部,以输送远离体空间管的液体。在一个实施例中,该液体的温度被控制为高于体温、与体温相同或者低于体温。在一个实施例案中,以cc/min为基础控制液体速率。在一个实施例中,监测液体施用并以数字方式显示。在一个实施例中,监测液体施用体积并从总排水中减去,因此记录的确切排水量分为液体输送体积和液体排出体积。在一个实施例中,通过包括总排水量减去给药液体的配方估计总失血量。在一个实施例中,如果输送的液体参数未能撤离,则提供警报,以防止未识别的保留的施用液体。在一个实施例中,分析移除的液体的性质,诸如pH、血细胞比容、氧化还原状态、温度,以监测随着时间身体空间从出血、感染、炎症或其他物理性质的恢复。在一个实施例中,这与医疗管间隙装置组合,以防止液体施加到由于体空间排出管从凝块或其他阻塞物材料阻塞而未充分排出的空间。在一个实施例中,该液体是盐水或其他生理平衡的液体替代配方。在一个实施例中,该液体是诱导胸膜固定术的化学物质(即滑石、四环素、多西环素或其他旨在诱导硬化的配方)。在一个实施例中,该液体是抗生素、抗真菌剂或其他治疗感染的药剂。在一个实施例中,该药剂是治疗肿瘤的抗癌剂。在一个实施例中,该液体是抗炎剂、抗心律失常药、抗纤维蛋白溶解剂、纤维蛋白溶解剂或其任意组合。在一个实施例中,补充腔可以前进或缩回。在一个实施例中,这可以通过导丝完成,以防止或最小化内部结构损伤的可能性。
尽管已经关于某些实施例描述了本发明,但是应该理解,本发明不受本文公开的实施例的限制,这些实施例是示例性的而非限制性的,但是包括本领域普通技术人员在阅读本公开内容时对其的所有修改和改编,并且落入所附权利要求中阐述的本发明的精神和范围内。
Claims (26)
1.一种用于致动导丝的线轴驱动系统,所述系统包括:
设有入口的线轴外壳,所述线轴可绕其轴线旋转,以缠绕和展开所述线轴上的所述导丝,从而分别使所述导丝穿过所述入口抽出或前进;
包含凹槽表面的轨道,所述轨道与所述线轴的周边间隔开并至少部分地围绕所述线轴外壳内的线轴的周边延伸,所述轨道适于在所述线轴旋转时将所述导丝引导到所述线轴上或从所述线轴上离开;和
电动机外壳,所述电动机外壳具有设置在其中的电动机,并且可操作,以通过所述入口将所述导丝从所述线轴外壳推进或退回到所述线轴外壳中,所述线轴外壳和电动机壳体一体地组合成单个手持组件。
2.根据权利要求1所述的线轴驱动系统,所述轨道适于有助于将所述导丝以缠绕状态保持在所述线轴上,防止其展开,否则可能由于所述导丝的刚度而导致展开。
3.根据权利要求1所述的线轴驱动系统,所述凹槽表面包括与所述线轴的周边表面相对的多个周向间隔开的槽。
4.根据权利要求1所述的线轴驱动系统,所述轨道包括表面,所述表面具有与所述线轴的周边表面相对的多个周向间隔开的脊。
5.根据权利要求1所述的线轴驱动系统,所述轨道包括与所述线轴的周边表面相对的多个周向间隔开的轮子,当所述导丝在所述线轴上缠绕或展开时,所述轮子有效地可旋转地接合所述导丝。
6.根据权利要求5所述的线轴驱动系统,所述轮子朝向所述线轴的周边表面径向偏置,以便在线轴旋转时有效地接合所述导丝。
7.根据权利要求1所述的线轴驱动系统,所述轨道包括多个滚珠轴承,所述滚珠轴承沿着与所述线轴的周边表面相对的圆形路径限定。
8.根据权利要求1所述的线轴驱动系统,所述轨道包括低摩擦材料或涂层,以在所述线轴旋转时,在所述导丝和所述轨道的特征之间提供低摩擦的滑动界面。
9.根据权利要求1所述的线轴驱动系统,所述电动机可旋转地耦合到所述线轴的轴上,所述轴延伸穿过所述线轴外壳和所述电动机外壳之间的孔,所述电动机从而有效地旋转所述线轴。
10.根据权利要求9所述的线轴驱动系统,还包括在所述电动机外壳内的电池,用于向所述电动机提供电能。
11.根据权利要求10所述的线轴驱动系统,还包括在所述电动机外壳内的控制器,所述控制器可操作地耦合到所述电动机,构造所述控制器,以操作所述电动机,以便通过旋转所述线轴来致动所述导丝。
12.根据权利要求11所述的线轴驱动系统,构造所述控制器,以根据特定程序和/或响应于传送到所述控制器的感测参数来选择性地操作所述电动机。
13.根据权利要求1所述的线轴驱动系统,还包括密封在所述手持组件的电池,用于向所述电动机供应电能,其中所述手持组件构造为一次性的。
14.根据权利要求13所述的线轴驱动系统,所述手持组件是无菌的。
15.根据权利要求1所述的线轴驱动系统,还包括在所述手持组件内的控制器,所述控制器可操作地连接到所述电动机,构造所述控制器,以操作所述电动机,以便通过旋转所述线轴来致动所述导丝。
16.根据权利要求15所述的线轴驱动系统,构造所述控制器,以根据特定程序和/或响应于传送到所述控制器的感测参数来选择性地操作所述电动机。
17.根据权利要求16所述的线轴驱动系统,所述控制器可操作地连接到控制系统并形成控制系统的一部分,所述控制系统包括一个或多个传感器,构造所述传感器,以检测一个或多个参数并向控制器发送指示检测到的参数的信号。
18.根据权利要求17所述的线轴驱动系统,构造所述一个或多个传感器,以检测医疗管中的一个或多个以下情况:医疗管的方向;医疗管内的间隙构件的位置;医疗管内材料的压力水平、pH值、葡萄糖水平、蛋白质水平或氧化还原状态;医疗管内的障碍物;医疗管中的扭结;一定量的纤维蛋白凝块降解副产物、内毒素、细菌感染副产物、活性氧物质或医疗管中的血细胞比容。
19.根据权利要求18所述的线轴驱动系统,构造所述一个或多个传感器,以检测正在用所述医疗管治疗的患者的以下一种或多种情况:温度、心率和节律、心律失常、呼吸率、炎症水平、疼痛程度或氧饱和度;患者的方向;患者的活动水平;患者的咳嗽;患者每天步行的数量;一种由患者进行的活动;病人的位置;或患者在特定位置的时间长度。
20.根据权利要求1所述的线轴驱动系统,其进一步包括Y形耦合器,所述Y形耦合器具有构造成流动地耦合到医疗管的第一管部分,构造成流动地耦合到抽吸源的第二管部分,和耦合到包括所述入口的第三管部分,其中从所述线轴外壳的入口延伸的所述导丝的前进和抽出相应地使所述导丝通过所述第一管部分前进和退出。
21.根据权利要求20所述的线轴驱动系统,所述Y形耦合器包括在所述第三管部分中的圆柱形套管,当导丝前进和抽出时,导丝将穿过所述圆柱形套管,以便从所述导丝上擦拭材料,使得所述材料不进入线轴外壳。
22.根据权利要求21所述的线轴驱动系统,所述圆柱形套管包括可吸收液体的多孔材料。
23.根据权利要求22所述的线轴驱动系统,所述第三管部分包括小直径,所述套管位于所述第三管部分中的所述小直径部分的近侧,擦拭器设置在所述第三管部分中的所述套管的近侧,以及润滑器设置在所述第三管部分中靠近所述擦拭器,其中所述导丝穿过每个所述小直径部分,所述第三管部分内所述套管、所述擦拭器和所述润滑器在其上前进并穿过其抽出。
24.根据权利要求22所述的线轴驱动系统,所述Y形耦合器还包括刷毛,当导丝平移通过第三管部分时,该刷毛有效地从导丝上研磨和移除材料。
25.根据权利要求1所述的线轴驱动系统,还包括位于所述线轴外壳内的滚轴,其中所述滚轴沿第一方向的旋转将所述导丝抽出到所述线轴外壳中,并且所述滚轴沿第二方向的旋转使所述导丝从所述线轴外壳中旋出。
26.一种用于致动医疗管中的导丝的方法,包括将权利要求1所述的用于致动导丝的线轴驱动系统连接到医疗管,以提供所述管与线轴驱动系统的线轴外壳的入口之间的液体连通,并且操作线轴驱动系统,以使所述导丝穿过所述入口并穿过所述医疗管前进和抽出。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210896626.XA CN115624398A (zh) | 2017-02-16 | 2018-02-12 | 与医疗管有关的装置和方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762460070P | 2017-02-16 | 2017-02-16 | |
| US62/460,070 | 2017-02-16 | ||
| PCT/US2018/017807 WO2018152059A1 (en) | 2017-02-16 | 2018-02-12 | Devices and methods related to medical tubes |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210896626.XA Division CN115624398A (zh) | 2017-02-16 | 2018-02-12 | 与医疗管有关的装置和方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110678406A CN110678406A (zh) | 2020-01-10 |
| CN110678406B true CN110678406B (zh) | 2022-08-16 |
Family
ID=63169606
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880018193.XA Active CN110678406B (zh) | 2017-02-16 | 2018-02-12 | 与医疗管有关的装置和方法 |
| CN202210896626.XA Pending CN115624398A (zh) | 2017-02-16 | 2018-02-12 | 与医疗管有关的装置和方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210896626.XA Pending CN115624398A (zh) | 2017-02-16 | 2018-02-12 | 与医疗管有关的装置和方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US11884505B2 (zh) |
| EP (1) | EP3583059A4 (zh) |
| JP (3) | JP7111374B2 (zh) |
| CN (2) | CN110678406B (zh) |
| AU (1) | AU2018220820B2 (zh) |
| BR (1) | BR112019017130A8 (zh) |
| CA (1) | CA3053772A1 (zh) |
| MX (1) | MX2019009775A (zh) |
| WO (1) | WO2018152059A1 (zh) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11191886B2 (en) * | 2013-06-14 | 2021-12-07 | The Cleveland Clinic Foundation | Motion-assisted systems, devices and methods for minimizing obstruction of medical devices |
| US12076536B2 (en) * | 2018-05-15 | 2024-09-03 | Becton, Dickinson And Company | Syringe plunger stopper for high dose accuracy drug delivery |
| US10881484B2 (en) * | 2019-01-11 | 2021-01-05 | Clearflow, Inc. | Medical tube clearance device |
| WO2020212834A1 (en) * | 2019-04-15 | 2020-10-22 | Mikron Sa | Equipment for winding medical tubing |
| US11724083B2 (en) | 2019-04-18 | 2023-08-15 | Becton, Dickinson And Company | Instrument delivery device having a multi-position rotary element |
| US10994076B1 (en) | 2019-07-25 | 2021-05-04 | Circulatech, Llc | Methods and devices to prevent obstructions in medical tubes |
| CN110653227B (zh) * | 2019-10-25 | 2024-06-18 | 淮安市第一人民医院 | 气管切开金属套管的清洗装置 |
| US20210213245A1 (en) * | 2020-01-09 | 2021-07-15 | Becton, Dickinson And Company | Multi-lumen extension system |
| US20210290418A1 (en) * | 2020-03-20 | 2021-09-23 | Quipmen Medical Inc. | Systems and methods for implanting a gastric bypass device |
| US20210290126A1 (en) * | 2020-03-23 | 2021-09-23 | Becton, Dickinson And Company | Extension set and related systems and methods |
| US12201800B2 (en) | 2020-03-27 | 2025-01-21 | Becton, Dickinson And Company | Extension set and related systems and methods |
| CN111760187B (zh) * | 2020-07-31 | 2025-01-24 | 大连科万维医疗科技有限公司 | 一种转接密封装置及系统 |
| CN112370071B (zh) * | 2020-11-06 | 2021-07-20 | 湖南万脉医疗科技有限公司 | 一种用于呼吸音监测的柔性贴片 |
| WO2022109006A1 (en) * | 2020-11-17 | 2022-05-27 | Clearflow, Inc. | Medical tube clearance device |
| CN112472888B (zh) * | 2020-12-20 | 2022-11-04 | 杭州威德医疗科技有限公司 | 一种胸腹腔外科手术用主动式封闭引流机构 |
| WO2022155181A1 (en) * | 2021-01-13 | 2022-07-21 | Becton, Dickinson And Company | Vascular access instrument advancement devices, systems, and methods |
| CN114246677A (zh) * | 2022-01-24 | 2022-03-29 | 微亚医疗科技(苏州)有限公司 | 用于血管介入手术机器人的导丝旋转与递送传动装置 |
| CN115055455B (zh) * | 2022-06-09 | 2023-05-16 | 江阴市人民医院 | 一种外科护理用的辅助清洗设备 |
| US20240140755A1 (en) * | 2022-11-01 | 2024-05-02 | Western New England University | Apparatus and method of feeding arbitrarily thin wire with controlled tension |
| CN119100216B (zh) * | 2024-11-08 | 2025-01-24 | 中国水利水电第九工程局有限公司 | 一种用于光伏电站线路排放装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3956011A (en) * | 1974-04-11 | 1976-05-11 | Carleton John S | Method for cleaning disposable suction catheters |
| CN1278710A (zh) * | 1997-09-26 | 2001-01-03 | 巴克斯特国际有限公司 | 封闭的单手操作的血液采样系统 |
| CN102772833A (zh) * | 2012-08-17 | 2012-11-14 | 宁波健世生物科技有限公司 | 可有效清除阻塞物的引流系统 |
| US20120285485A1 (en) * | 2009-11-20 | 2012-11-15 | Ali Waqar Majeed | Cleaning apparatus |
| CN202665587U (zh) * | 2012-03-26 | 2013-01-16 | 周星 | 一种自润滑穿刺器 |
| US20150231313A1 (en) * | 2014-02-17 | 2015-08-20 | Clearflow, Inc. | Medical tube clearance device |
| US20150305819A1 (en) * | 2014-03-11 | 2015-10-29 | William R Krause | Cannulated Instrument Flushing and Cleaning Instrument |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4160451A (en) * | 1977-11-25 | 1979-07-10 | Abbott Laboratories | Unidirectional catheter placement unit |
| JP4307831B2 (ja) | 2002-12-27 | 2009-08-05 | オリンパス株式会社 | 内視鏡管路洗滌装置 |
| US7785269B2 (en) * | 2004-05-14 | 2010-08-31 | Ethicon Endo-Surgery, Inc. | Medical instrument having a guidewire and an add-to catheter |
| US7951243B2 (en) | 2008-01-25 | 2011-05-31 | Clear Catheter Systems, Inc. | Methods and devices to clear obstructions from medical tubes |
| FR2931599A1 (fr) * | 2008-05-26 | 2009-11-27 | Univ Pasteur | Dispositif de deplacement controle en translation d'un element allonge |
| JP5403785B2 (ja) * | 2008-10-15 | 2014-01-29 | 国立大学法人 名古屋工業大学 | 挿入装置 |
| JP5818357B2 (ja) * | 2009-02-10 | 2015-11-18 | ヴェサテック エルエルシー | 外科用ガイドワイヤを操作するための方法および装置 |
| WO2013100233A1 (ko) | 2011-12-29 | 2013-07-04 | Hwang Sung Oh | 카테타 시술용 가이드 와이어 삽입기 |
| JP6147746B2 (ja) * | 2012-07-19 | 2017-06-14 | テルモ株式会社 | 収容具 |
| US9205229B2 (en) * | 2013-10-24 | 2015-12-08 | Avent, Inc. | Catheter advancement device |
| EP3862045A1 (en) | 2014-02-17 | 2021-08-11 | Clearflow, Inc. | Medical tube clearance |
| JP6774937B2 (ja) | 2014-09-29 | 2020-10-28 | センテース,インク. | 胸腔ドレナージを管理するための装置 |
| US10543343B2 (en) * | 2014-12-23 | 2020-01-28 | B. Braun Melsungen Ag | Needle assemblies with flashback indicator and related methods |
| EP4000678B1 (en) | 2016-03-03 | 2025-02-12 | Esculon, LLC | Devices and methods for managing chest drainage |
-
2018
- 2018-02-12 AU AU2018220820A patent/AU2018220820B2/en active Active
- 2018-02-12 CN CN201880018193.XA patent/CN110678406B/zh active Active
- 2018-02-12 MX MX2019009775A patent/MX2019009775A/es unknown
- 2018-02-12 CA CA3053772A patent/CA3053772A1/en active Pending
- 2018-02-12 EP EP18754451.5A patent/EP3583059A4/en active Pending
- 2018-02-12 US US16/485,967 patent/US11884505B2/en active Active
- 2018-02-12 CN CN202210896626.XA patent/CN115624398A/zh active Pending
- 2018-02-12 JP JP2019544034A patent/JP7111374B2/ja active Active
- 2018-02-12 BR BR112019017130A patent/BR112019017130A8/pt not_active Application Discontinuation
- 2018-02-12 WO PCT/US2018/017807 patent/WO2018152059A1/en unknown
-
2019
- 2019-08-15 US US16/541,783 patent/US10729825B2/en active Active
-
2022
- 2022-07-13 JP JP2022112775A patent/JP7428417B2/ja active Active
-
2023
- 2023-12-18 US US18/542,986 patent/US20240182260A1/en active Pending
-
2024
- 2024-01-18 JP JP2024006257A patent/JP2024029253A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3956011A (en) * | 1974-04-11 | 1976-05-11 | Carleton John S | Method for cleaning disposable suction catheters |
| CN1278710A (zh) * | 1997-09-26 | 2001-01-03 | 巴克斯特国际有限公司 | 封闭的单手操作的血液采样系统 |
| US20120285485A1 (en) * | 2009-11-20 | 2012-11-15 | Ali Waqar Majeed | Cleaning apparatus |
| CN202665587U (zh) * | 2012-03-26 | 2013-01-16 | 周星 | 一种自润滑穿刺器 |
| CN102772833A (zh) * | 2012-08-17 | 2012-11-14 | 宁波健世生物科技有限公司 | 可有效清除阻塞物的引流系统 |
| US20150231313A1 (en) * | 2014-02-17 | 2015-08-20 | Clearflow, Inc. | Medical tube clearance device |
| US20150305819A1 (en) * | 2014-03-11 | 2015-10-29 | William R Krause | Cannulated Instrument Flushing and Cleaning Instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| CA3053772A1 (en) | 2018-08-23 |
| MX2019009775A (es) | 2021-02-15 |
| AU2018220820A1 (en) | 2019-09-05 |
| JP2024029253A (ja) | 2024-03-05 |
| US20240182260A1 (en) | 2024-06-06 |
| EP3583059A4 (en) | 2020-12-23 |
| JP2020507417A (ja) | 2020-03-12 |
| US10729825B2 (en) | 2020-08-04 |
| EP3583059A1 (en) | 2019-12-25 |
| CN115624398A (zh) | 2023-01-20 |
| JP2022141784A (ja) | 2022-09-29 |
| JP7111374B2 (ja) | 2022-08-02 |
| JP7428417B2 (ja) | 2024-02-06 |
| US20200038563A1 (en) | 2020-02-06 |
| BR112019017130A2 (pt) | 2020-04-14 |
| US20200054863A1 (en) | 2020-02-20 |
| AU2018220820B2 (en) | 2024-02-29 |
| US11884505B2 (en) | 2024-01-30 |
| BR112019017130A8 (pt) | 2023-03-07 |
| CN110678406A (zh) | 2020-01-10 |
| WO2018152059A1 (en) | 2018-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110678406B (zh) | 与医疗管有关的装置和方法 | |
| AU2023200225B2 (en) | Systems and methods for treatment of fluid overload | |
| EP2906266B1 (en) | Active system for in-situ clearing of secretions and occlusions in tubes | |
| US10232150B2 (en) | Body cavity drainage devices and related methods | |
| EP3562435B1 (en) | Artificial airway management devices, systems and methods | |
| US8246752B2 (en) | Methods and devices to clear obstructions from medical tubes | |
| US11986360B2 (en) | Medical tube clearance device | |
| WO2022031771A1 (en) | Mechanized surgical drain and method of use | |
| WO2017015469A1 (en) | Actuated extra-venous valve |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |