CN110431304B - Movable device and control method of movable device - Google Patents
Movable device and control method of movable device Download PDFInfo
- Publication number
- CN110431304B CN110431304B CN201880018764.XA CN201880018764A CN110431304B CN 110431304 B CN110431304 B CN 110431304B CN 201880018764 A CN201880018764 A CN 201880018764A CN 110431304 B CN110431304 B CN 110431304B
- Authority
- CN
- China
- Prior art keywords
- actuator element
- actuator
- fixing
- driven body
- movable device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 60
- 230000007423 decrease Effects 0.000 claims abstract description 11
- 230000008569 process Effects 0.000 claims description 44
- 230000033001 locomotion Effects 0.000 claims description 26
- 239000012530 fluid Substances 0.000 claims description 10
- 229920002994 synthetic fiber Polymers 0.000 claims description 6
- 230000003213 activating effect Effects 0.000 claims description 5
- 238000005485 electric heating Methods 0.000 claims description 2
- 230000007246 mechanism Effects 0.000 description 97
- 230000008878 coupling Effects 0.000 description 39
- 238000010168 coupling process Methods 0.000 description 39
- 238000005859 coupling reaction Methods 0.000 description 39
- 230000003247 decreasing effect Effects 0.000 description 20
- 238000012937 correction Methods 0.000 description 16
- 238000010438 heat treatment Methods 0.000 description 14
- 238000004519 manufacturing process Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 229910052751 metal Inorganic materials 0.000 description 9
- 239000002184 metal Substances 0.000 description 9
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 229920005594 polymer fiber Polymers 0.000 description 8
- 238000003860 storage Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 230000001276 controlling effect Effects 0.000 description 6
- 239000000835 fiber Substances 0.000 description 6
- 230000017525 heat dissipation Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 239000011347 resin Substances 0.000 description 5
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 238000001816 cooling Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000010408 film Substances 0.000 description 4
- 229920001940 conductive polymer Polymers 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 230000020169 heat generation Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000012209 synthetic fiber Substances 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 239000002783 friction material Substances 0.000 description 2
- 229920002521 macromolecule Polymers 0.000 description 2
- 229910001120 nichrome Inorganic materials 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 1
- 229920002647 polyamide Polymers 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920005678 polyethylene based resin Polymers 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images















Landscapes
- Micromachines (AREA)
- Transmission Devices (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
可动装置具备:通过能量的增减而产生变形的致动器元件(41、42)、在变形的方向上固定致动器元件的一部分的固定部(21、22、421、422)以及与致动器元件的其他部分连结的被驱动体(31)。基于固定部的固定力是可变的。由此,能够稳定地驱动被驱动体。

The movable device includes: an actuator element (41, 42) that is deformed by an increase or decrease in energy, a fixing portion (21, 22, 421, 422) that fixes a part of the actuator element in the direction of deformation, and A driven body (31) to which other parts of the actuator element are connected. The fixing force based on the fixing portion is variable. Thereby, the driven body can be driven stably.
Description
Cross reference to related applications
The present application is based on japanese patent application No. 2017-057942, filed on 3/23 of 2017, which is incorporated by reference into the present application.
Technical Field
The disclosure in this specification relates to a movable device that utilizes deformation of an actuator element.
Background
Documents of the prior art
Patent document
Patent document 1: japanese patent laid-open publication No. 2016-42783
In the prior art, a part of the actuator element is fixed. However, the amount of deformation of the actuator element may sometimes be unstable. In particular, the reference position may sometimes be different for each actuator element. In other respects, in the conventional technique, the reference position of the deformation of the actuator element, that is, the zero point may be shifted. For example, if the device is used for a long time, unrecoverable deformation accumulates, and the reference position may shift.
In addition, in other points of view, in the case where an external force is applied to the actuator element, the actuator element may be excessively deformed. Such deformation by an external force may leave unrecoverable deformation of the actuator element.
Further, in other points of view, it is preferable to suppress the load of the actuator element. For example, the force with which one actuator element deforms the other becomes a load for one actuator element.
In the above-mentioned point of view, in other points of view not mentioned, further improvement is required for the movable device.
Disclosure of Invention
An object of the present invention is to provide a movable device, a method of manufacturing the movable device, and a method of controlling the movable device, which suppress a failure caused by fixing of an actuator element.
Another object of the present invention is to provide a movable device capable of setting a reference position, a method of manufacturing the movable device, and a method of controlling the movable device.
Another object of the present invention is to provide a movable device, a method of manufacturing the movable device, and a method of controlling the movable device, which can suppress deformation of an actuator element due to an external force.
Another object of the present invention is to provide a movable device that suppresses a load on an actuator element, a method of manufacturing the movable device, and a method of controlling the movable device.
The movable device disclosed herein includes: the actuator element is deformed by increasing or decreasing energy, a fixing portion for fixing a part of the actuator element in a direction of deformation, and a driven body connected to another part of the actuator element, and a fixing force of the fixing portion is variable.
According to the movable device of the present invention, the fixed portion can change the fixing force. In the case where the fixing force in one part of the actuator element is strong, the other part can output the deformation of the actuator element. On the other hand, in the case where the fixing force in a part of the actuator element is weak, the displacement of the part of the actuator element is allowed. As a result, the trouble caused by the fixing of the actuator element can be suppressed.
The method for manufacturing a movable device disclosed herein includes the steps of: : a moving step of activating the actuator element with a part of the actuator element fixed, and moving a driven body coupled to the other part of the actuator element by deformation of the actuator element; and a setting step of setting a reference position in the deformation of the actuator element, the setting step including the steps of: the method for manufacturing the actuator device includes a step of releasing a part of the actuator element, a step of deactivating the actuator element in a state in which the part is released, a step of positioning the actuator element at a reference position in a state in which the part is released and the actuator element is deactivated, and a step of fixing a part of the actuator element in a state in which the actuator element is positioned at the reference position.
According to the method of manufacturing the movable device of the present invention, the actuator element is positioned at the reference position in a state where a part of the actuator element is released and the actuator element is disabled. Thereafter, a portion of the actuator element is fixed. Thus, the actuator element outputs a displacement from the reference position.
The method for controlling the movable device disclosed herein includes the steps of: : a first moving step of activating the first actuator element with a part of the first actuator element fixed, and moving a driven body coupled to the other part of the first actuator element by deformation of the first actuator element; and a second moving step of activating the second actuator element in a state in which a part of the second actuator element is fixed, and moving the driven body coupled to the other part of the second actuator element by deformation of the second actuator element, wherein the first moving step includes a step of releasing the part of the second actuator element, and the second moving step includes a step of releasing the part of the first actuator element.
According to the method for controlling the movable device of the present invention, when two actuator elements are used, one actuator element is deactivated when the other actuator element is driven. When the first actuator element is activated, a portion of the first actuator element is fixed and a portion of the second actuator element is released. Thereby, the load of the first actuator element is suppressed when the first actuator element is activated. When the second actuator element is activated, a portion of the second actuator element is fixed and a portion of the first actuator element is released. Thereby, the load of the second actuator element is suppressed when the second actuator element is activated.
Drawings
FIG. 1 is a perspective view of at least one embodiment of a movable apparatus.
Fig. 2 is a partial sectional view of the movable device.
Fig. 3 is a perspective view of an actuator element.
Fig. 4 is a flowchart for swinging the movable device.
Fig. 5 is a flowchart showing a method of manufacturing the movable device.
FIG. 6 is a partial cross-sectional view of at least one embodiment of a movable device.
FIG. 7 is a block diagram illustrating a released state in accordance with at least one embodiment.
FIG. 8 is a partial cross-sectional view of at least one embodiment of a movable device.
FIG. 9 is a partial cross-sectional view of at least one embodiment of a movable device.
FIG. 10 is a perspective view of at least one embodiment of a movable device.
FIG. 11 is a cross-sectional view of a fixation portion of at least one embodiment.
Fig. 12 is a flowchart showing a method of manufacturing the movable device.
FIG. 13 is a flow diagram of at least one embodiment.
FIG. 14 is a perspective view of at least one embodiment of a movable device.
FIG. 15 is a perspective view of at least one embodiment of a movable device.
Fig. 16 is a flowchart for swinging the movable device.
Fig. 17 is a block diagram showing a state of a fixed unit.
Fig. 18 is a block diagram showing a state of a fixed part.
FIG. 19 is a cross-sectional view of a fixation portion of at least one embodiment.
FIG. 20 is a cross-sectional view of a fixation portion of at least one embodiment.
Detailed Description
Embodiments are described with reference to the drawings. In the embodiments, the same reference numerals or reference numerals having different hundreds or more digits are sometimes used for functionally and/or structurally corresponding parts and/or related parts. With regard to the corresponding portions and/or the associated portions, reference can be made to the description of the other embodiments.
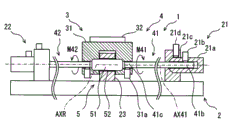
In fig. 1, a movable device 1 includes a fixed base 2 and a movable portion 3 that is mechanically movable with respect to the base 2. The movable portion 3 is movable in rotation around a rotation axis AXR extending in the height direction HD. The movable portion 3 reciprocates within a predetermined angular range RG around the rotation axis AXR. The movable section 3 has a driven body 31. The action of the movable portion 3 is also referred to as swing. Further, the moving direction of the movable portion 3 is not limited to rotation. The moving direction of the movable portion 3 can be adapted to various operations such as, for example, parallel movement along the height direction HD, parallel movement along the width direction WD, and rotational movement around the depth direction DD.
The movable device 1 includes an element 32 mounted on the driven body 31. The element 32 provides an electrically active or an electrically passive action. The element 32 is, for example, an electric light source, an electric blower, an electric heat source, an electric wave source, or an electromagnetic force source. The element 32 is for example an electrical sensor element. For the electrical connection, the movable device 1 may include a connection member that electrically connects the base 2 and the element 32. The element 32 has an axis VR32 for a primary function. For example, when the element 32 is a light source, the axis VR32 corresponds to the optical axis. For example, when the element 32 is a sensor, the axis VR32 corresponds to a detection axis. The shaft VR32 is swung by the rotation of the driven body 31. The axis VR32 oscillates through a range of rotational angles VRs.
The movable means 1 is also a sensor means. The element 32 is a sensor element. The element 32 has an axis VR32 that represents the detection direction and detection range. The element 32 detects a physical quantity in the direction of the axis VR 32. The element 32 is provided by various elements such as an image sensor, an infrared sensor, an ultrasonic sensor, a radar antenna, an electromagnetic wave sensor, and a radiation sensor. In this embodiment, the element 32 is an infrared sensor provided indoors. The detection signal of the element 32 is supplied to the device using infrared information by wire or wirelessly. The infrared information is supplied to, for example, an air conditioner and used. The movable device 1 is provided in a room of a house, a business office, a vehicle, a ship, an airplane, or the like, and collects information associated with a person in the room. The base 2 is fixed in these chambers.
The movable device 1 moves so as to swing the shaft VR 32. The movable device 1 provides a sensor device that moves the axis VR 32. The movement of the axis VR32 can provide a variety of sensor devices of the pointing direction variable type, tracking type, or scanning type. In this embodiment, the driven body 31 periodically swings, and thus a scanning type sensor device is provided. The shaft VR32 rotates about a rotation shaft AXR. The axis VR32 is movable within a range of a predetermined pivot angle VRs along a plane extending in the width direction WD and the depth direction DD. In this embodiment, the rotation angle VRS is a scanning range.
The movable device 1 includes an actuator mechanism 4. The actuator mechanism 4 provides a rotational force for rotating the movable portion 3. The actuator mechanism 4 is also a power source. The actuator mechanism 4 provides a rotational force in a reciprocating manner.
The actuator mechanism 4 has two actuator elements 41, 42. The two actuator elements 41, 42 are arranged on the extension of the pivot axis AXR. The two actuator elements 41 and 42 are disposed on both sides of the driven body 31. The driven body 31 and the two actuator elements 41, 42 are arranged in series. In the figure, the actuator elements 41, 42 are illustrated with a somewhat thicker emphasis.
The first actuator element 41 is coupled to the driven body 31 and the fixed portion 21. The first actuator element 41 extends along an actuator axis AX 41. The actuator axis AX41 is also the central axis of the first actuator element 41. The actuator axis AX41 is located on an extension of the rotation axis AXR. The actuator shaft AX41 is coaxial with the rotation shaft AXR.
The second actuator element 42 is coupled to the driven body 31 and the fixing portion 22. The second actuator element 42 extends along an actuator axis AX 42. The actuator axis AX42 is also the central axis of the second actuator element 42. The actuator axis AX42 is located on an extension of the rotation axis AXR. The actuator shaft AX42 is coaxial with the rotation shaft AXR.
The driven body 31 is disposed in the center of the base 2. The fixing portion 21 is provided at one end of the base 2. The fixing portion 21 is fixed to the base 2. The fixing portion 22 is provided at the other end of the base 2. The fixing portion 22 is fixed to the base 2. The base 2 is made of a material capable of overcoming the force generated by the actuator mechanism 4 and maintaining the shape of the movable device 1. For example, the base 2 is made of metal or resin. A part or the whole of the base 2 may be provided by a printed wiring board.
The first actuator element 41 and the second actuator element 42 are symmetrically arranged with respect to the driven body 31. The first actuator element 41 and the second actuator element 42 have a symmetrical configuration. In the following description, the first actuator element 41 is explained. This description can be referred to as a description of the second actuator element 42.
The first actuator element 41 has a fixed end 41b that can be coupled to the fixed portion 21. The fixed end 41b is coupled to the fixed portion 21 at least when the first actuator element 41 outputs a rotational force. The first actuator element 41 has an output end 41c that can be coupled to the driven body 31. The output end 41c is coupled to the driven body 31 at least when the first actuator element 41 outputs the rotational force. The driven body 31 is coupled to the actuator element 41 on an actuator shaft AX 41. In addition, the names of the fixed end 41b and the output end 41c are names for convenience. In the following description, the fixed end 41b and the output end 41c may be simply referred to as end portions.
The first actuator element 41 is rod-shaped. The first actuator element 41 is of a shape known as elongated rod or fiber. The first actuator element 41 can be formed in a cylindrical or cylindrical shape.
The movable device 1 includes a guide mechanism 5 for guiding the operation of the movable portion 3. The guide mechanism 5 is provided between the support portion 23 provided on the base 2 and the driven body 31. The support portion 23 is fixed to the base 2. The guide mechanism 5 allows the driven body 31 to rotate about the height direction HD. The guide mechanism 5 suppresses the rotational movement about the depth direction DD and the rotational movement about the width direction WD. The guide mechanism 5 suppresses vertical movement in the depth direction DD and horizontal movement in the width direction WD in the movement of the driven body 31. The guide mechanism 5 can also suppress the forward and backward movement in the height direction HD. The guide mechanism 5 may allow the forward and backward movement in the height direction HD.
The height direction HD can be defined as a roll axis, the width direction WD as a pitch axis, and the depth direction DD as a yaw axis. In this case, the guide mechanism 5 allows the roll motion of the driven body 31. The guide mechanism 5 can also suppress excessive rolling motion beyond the usable range. For example, direct collision of the driven body 31 with the support portion 23 or indirect collision via an elastic member limits the roll movement range. The guide mechanism 5 suppresses the yaw motion and the pitch motion of the driven body 31. In addition, the guide mechanism 5 suppresses the vertical movement and the horizontal movement of the driven body 31. The guide mechanism 5 can also suppress the forward and backward movement of the driven body 31. The guide mechanism 5 sometimes allows the driven body 31 to move forward and backward.
The movable device 1 includes a control system 7. The control system 7 includes a control device (CNT)70 and energy increasing/decreasing devices (EX1, EX2)71, 72. The energy increasing/decreasing devices 71, 72 are devices for increasing/decreasing the energy of the two actuator elements 41, 42 in order to extract mechanical motion from the two actuator elements 41, 42. The energy increasing and decreasing devices 71, 72 increase and decrease the energy of the two actuator elements 41, 42 in order to rotate the two actuator elements 41, 42.
The control device has at least one arithmetic processing unit (CPU) and at least one storage device as a storage medium storing programs and data. The control device is provided by a microcomputer provided with a computer-readable storage medium. The storage medium is a non-transitory tangible storage medium that stores a computer-readable program in a non-transitory manner. The storage medium can be provided by a semiconductor memory, a magnetic disk, or the like. The control means can be provided by a computer or a set of computer resources linked by data communication means. The control device functions as the device described in the present specification by executing the program by the control device, and functions as the control device so as to execute the method described in the present specification.
The control system has, as input means, a plurality of signal sources that supply signals representing input information to the control device. The control system acquires information by storing the information in the storage device by the control device. The control system includes a plurality of control objects whose operations are controlled by the control device as output devices. The control system converts information stored in the storage device into a signal and supplies the signal to the control target object to control the operation of the control target object. For example, the control device obtains the operation signal and the stop signal from the outside, and activates the energy increasing and decreasing devices 71 and 72 intermittently, thereby moving the movable device 1 in a swinging manner.
A control device, a signal source, and a control target included in a control system provide various elements. At least a portion of these elements can be referred to as blocks for performing functions. In other perspectives, at least a portion of these elements can be referred to as modules or sections of structure. Further, elements included in the control system may also be referred to as means for realizing the functions thereof only in a case of interest.
The units and/or functions provided by the control system can be provided by software recorded in the memory means of the entity and by a computer executing the software, or by software only, or by hardware only, or by a combination thereof. For example, in the case where the control device is provided by an electronic circuit as hardware, it can be provided by a digital circuit or an analog circuit including a plurality of logic circuits.
The two actuator elements 41, 42 are actively deformed in one direction. The deformation directions of the two actuator elements 41, 42 are opposite directions, i.e. symmetrical directions. By using two actuator elements 41, 42, active deformation can be obtained in two directions, i.e. in the direction of reciprocation.
The actuator elements 41, 42 are deformed about the actuator axes AX41, AX42 by an increase or decrease in thermal energy. When the temperature of the first actuator element 41 rises, the first actuator element 41 is torsionally deformed. Since the fixed end 41b is fixed by the fixing portion 21, the driven body 31 rotates in the direction of the arrow M41 as the first direction. If the temperature of the second actuator element 42 rises, the second actuator element 42 deforms in a torsional manner. Since the fixed end 42b is fixed by the fixing portion 22, the driven body 31 rotates in the direction of the arrow M42 as the second direction. The direction of the arrow M41 and the direction of the arrow M42 are symmetrical with respect to the driven body 31. As a result, the driven body 31 rotates within the angular range indicated by the arrow M31. The arrow M31 corresponds to the rotation angle VRs of the shaft VR 32.
The actuator elements 41, 42 and the energy increasing and decreasing devices 71, 72 that can be used in this embodiment include the devices described in japanese patent laid-open No. 2016-42783. The contents described in japanese patent application laid-open No. 2016-42783 are incorporated by reference as the description of the technical elements in the present specification. The actuator elements 41, 42 can be provided by a variety of materials known as artificial muscles. For example, materials such as synthetic resins, metals, shape memory alloys, and organic materials can be used.
One example of an actuator element 41, 42 is a synthetic fibre. The synthetic fibers extend along the extension of the axis of rotation AXR. The synthetic fibers are elongated. Synthetic fibers are known as polymer fibers. A typical example of a polymer fiber is monofilament resin. The monofilament resin includes a polyamide-based resin and a polyethylene-based resin. For example, polymer fibers called nylon or polyethylene sometimes have a torsional deformation amount with respect to a temperature change, and can be used as the actuator elements 41, 42.
The macromolecules forming the polymer fibers are oriented in such a way as to extend along the actuator axes AX41, AX 42. The macromolecules sometimes have a "twist" about the actuator axes AX41, AX 42. The term "twist" sometimes refers to a twist in a single fiber, and sometimes refers to a twist between a plurality of fibers. The amount of torsional deformation of the polymer fiber with respect to temperature changes sometimes appears stronger along the direction of "twist" in the single fiber. In this embodiment, the actuator elements 41, 42 are single fibers. In other approaches, the amount of torsional deformation of the polymer fibers with respect to temperature changes sometimes manifests itself along the direction of "twist" between the multiple fibers. The actuator elements 41, 42 may also be a bundle of a plurality of polymer fibers twisted with each other.
An example of an actuator element 41, 42 is a shape memory alloy. Shape memory alloys extending along the actuator axes AX41, AX42 can be utilized. The shape memory alloy can be used in various shapes such as a single rod shape and a shape wound in a coil shape. The shape of the shape memory alloy is selected to obtain an amount of torsional deformation with respect to a change in temperature.
The energy increasing and decreasing means 71, 72 change the energy state of the actuator elements 41, 42 bi-directionally between a high energy state and a low energy state. The energy increasing/decreasing devices 71 and 72 can apply and remove energy electrically, optically, magnetically, electromagnetically, or by radiation. The application and removal of electric energy includes increase and decrease of electric heat, increase and decrease of electric current, increase and decrease of electric field, increase and decrease of electric charge, and the like. For example, when the energy states of the actuator elements 41 and 42 are represented by temperatures, the temperatures can be increased by applying light and decreased by cutting off light.
The application and removal of energy can be performed directly or indirectly. For example, the energy may be applied by means of an energy transfer part in direct contact with the actuator elements 41, 42, or indirectly by means of an energy transfer part arranged remote from the actuator elements 41, 42. The energy transfer component can be provided, for example, by an electrically heat-generating component.
For example, the energy increasing and decreasing devices 71, 72 increase the thermal energy of the actuator elements 41, 42 in order to actively rotate the actuator elements 41, 42. The increase in the thermal energy is realized by, for example, supplying current to the heat generating components provided in the actuator elements 41 and 42. For example, the energy increasing and decreasing devices 71, 72 decrease the thermal energy of the actuator elements 41, 42 in order to recover the actuator elements 41, 42 from active rotation. The reduction of the thermal energy is achieved by, for example, cutting off the supply of current to the heat generating components provided in the actuator elements 41 and 42 and dissipating the heat.
In fig. 2, the fixed portion 21 and the fixed portion 22 are symmetrically arranged with respect to the driven body 31. The fixing portion 21 and the fixing portion 22 have a symmetrical configuration. The driven body 31 has a symmetrical configuration with respect to the guide mechanism 5. In the following description, a portion related to the first actuator element 41 will be described. This description can be referred to as a description of the part associated with the second actuator element 42. The part associated with the first actuator element 41 includes a fixed part 21 and a third coupling mechanism 31c provided on the driven body 31.
The fixing portion 21 has an end sleeve 21a and a fixing block 21 c. The end sleeve 21a is coupled to an end of the actuator element 41. The end sleeve 21a is fixed to the fixing block 21 c. The fixing block 21c is fixed to the base 2.
The end sleeve 21a is a cylindrical member coaxial with the actuator element 41. The end sleeve 21a may be a polygonal square tube. The end sleeve 21a has an inner bore that receives the fixed end 41b of the actuator element 41. The end sleeve 21a has a first coupling mechanism 21b for coupling the fixed end 41b and the end sleeve 21 a. The first coupling mechanism 21b couples the fixed end 41b and the end sleeve 21a in the circumferential direction of the actuator shaft AX41 at least when the actuator element 41 outputs a rotational force.
The first attachment means 21b is provided by an inner bore and a set bolt. The positioning bolt is disposed radially toward the inner bore of the end socket 21 a. The positioning bolt fastens the fixed end 41b in the radial direction, thereby coupling the fixed end 41b and the end sleeve 21a in the axial direction and the circumferential direction.
The first coupling mechanism 21b can be provided by various mechanisms. For example, the first coupling mechanism 21b may be provided by a plurality of positioning bolts arranged in a radial direction, a chuck mechanism for fastening the fixed end 41b in the radial direction, a caulking sleeve for fastening the fixed end 41b in the radial direction, or the like. The first coupling mechanism 21b may allow the fixed end 41b to move in the axial direction with respect to the end socket 21a along the actuator axis AX 41. For example, the fixed end 41b may be coupled to the end sleeve 21a so that the fixed end 41b can move in the axial direction within a limited range. For example, an elastic member such as a spring or rubber can be used. The first coupling mechanism 21b may be provided by an openable and closable mechanism. For example, the first coupling mechanism 21b can be provided by an electromagnetic mechanism capable of switching a state in which the fixed end 41b is fixed in the circumferential direction and a state in which the fixed end 41b can be rotated in the circumferential direction.
The fixing block 21c has an inner hole for receiving the end sleeve 21 a. The fixed block 21c has a second coupling mechanism 21d that couples the end sleeve 21a and the fixed block 21 c. The second coupling mechanism 21d couples the end sleeve 21a and the fixed block 21c in the circumferential direction of the actuator shaft AX41 at least when the actuator element 41 outputs a rotational force.
The second coupling means 21d is provided by an inner bore and a set bolt. The positioning bolt is disposed radially toward the inner hole of the fixing block 21 c. The positioning bolt fastens the end socket 21a in the radial direction, thereby connecting the end socket 21a and the fixing block 21c in the axial direction and the circumferential direction.
The second coupling mechanism 21d can be provided by various mechanisms. For example, the second coupling mechanism 21d may be provided by a plurality of positioning bolts arranged in a radial direction, a chuck mechanism that fastens the end socket 21a in the radial direction, a caulking socket that fastens the end socket 21a in the radial direction, or the like. The second coupling mechanism 21d may allow the axial movement of the end fitting 21a along the actuator shaft AX 41. For example, the fixed block 21c and the end sleeve 21a may be coupled so that the end sleeve 21a can move in the axial direction within a limited range. For example, an elastic member such as a spring or rubber can be used. The second coupling mechanism 21d may be provided by an openable and closable mechanism. For example, the second coupling mechanism 21d can be provided by an electromagnetic mechanism capable of switching a state in which the end portion of the actuator element 41 is fixed in the circumferential direction and a state in which the end portion of the actuator element 41 is rotatable in the circumferential direction.
The driven body 31 has an inner hole that receives the output end 41c of the actuator element 41. The driven body 31 has a third coupling mechanism 31a for coupling the driven body 31 and the output end 41 c. The third coupling mechanism 31a couples the output end 41c and the driven body 31 in the circumferential direction of the actuator shaft AX41 at least when the actuator element 41 outputs the rotational force.
The third coupling means 31a is provided by an inner bore and a set bolt. The set bolts are disposed radially toward the inner bore of the driven body 31. The positioning bolt fastens the output end 41c in the radial direction, thereby coupling the driven body 31 and the output end 41c in the axial direction and the circumferential direction.
The third coupling mechanism 31a can be provided by various mechanisms. For example, the third coupling mechanism 31a may be provided by a plurality of positioning bolts arranged in a radial direction, a chuck mechanism that fastens the output end 41c in the radial direction, a caulking sleeve that fastens the output end 41c in the radial direction, or the like. The third coupling mechanism 31a may allow the output end 41c to move in the axial direction with respect to the driven body 31 along the actuator shaft AX 41. For example, the output end 41c may be coupled to the driven body 31 so that the output end 41c can move in the axial direction within a limited range. For example, an elastic member such as a spring or rubber can be used. The third coupling mechanism 31a may be provided by an openable and closable mechanism. For example, the third coupling mechanism 31a can be provided by an electromagnetic mechanism that can switch between a state in which the output end 41c is fixed in the circumferential direction and a state in which the output end 41c is allowed to rotate in the circumferential direction.
The driven body 31 is rotatably supported by the guide mechanism 5. The guide mechanism 5 has a shaft 51 and a guide hole 52. The shaft 51 is provided by a cylindrical member having a coaxial rotation axis AXR. The shaft 51 is fixed to the driven body 31. Both ends of the shaft 51 are fixed to the driven body 31. The driven body 31 has a shaft 51. The guide hole 52 is provided in the support portion 23. The support portion 23 has a guide hole 52. The support portion 23 is a member for supporting the driven body 31. The support portion 23 is fixed to the base 2. The support 23 is a block. The guide hole 52 is provided by a through hole penetrating the support portion 23. The guide hole 52 receives the shaft 51. The guide hole 52 allows rotation of the shaft 51. As a result, the support portion 23 rotatably supports the driven body 31.
The outer surface of the shaft 51 is partially in contact with the inner surface of the guide hole 52. When the driven body 31 rotates, the outer surface of the shaft 51 and the inner surface of the guide hole 52 slide with each other. The driven body 31 is guided around the shaft 51. The parts providing the shaft 51 and the guide hole 52 are made of a low friction material. It is also possible to make the parts providing the shaft 51 or the guide hole 52 of a low friction material. Friction between the shaft 51 and the guide hole 52 is suppressed.
The support portion 23 faces the driven body 31 at both end surfaces thereof. The support portion 23 partially contacts the driven body 31 at both end surfaces thereof. When the driven body 31 rotates, the support portion 23 and the driven body 31 slide with each other.
The heat of the actuator element 41 is dissipated from the whole of the actuator element 41 to the outside environment. The heat of the actuator element 41 is radiated from the fixed end 41b via the fixed portion 21. At this time, the first connecting mechanism 21b and the second connecting mechanism 21d contribute to reducing the thermal resistance of the heat dissipation path. Then, heat of the actuator element 41 is dissipated from the output end 41c via the driven body 31. The heat of the actuator element 41 is sometimes dissipated from the output end 41c through the driven body 31, the support portion 23, and the base 2. At this time, the third coupling mechanism 31a contributes to reducing the thermal resistance of the heat dissipation path.
Further, the contact between the driven body 31 and the support portion 23 and/or the contact between the shaft 51 and the guide hole 52 also contribute to reducing the thermal resistance of the heat dissipation path. The heat of the actuator element 41 is dissipated from the output end 41c via the driven body 31, the contact between the driven body 31 and the support portion 23, and the support portion 23. The heat of the actuator element 41 is dissipated from the output end 41c through the driven body 31, via the shaft 51, the contact between the shaft 51 and the guide hole 52, and the support portion 23. In this way, the actuator element 41 radiates heat through the driven body 31 and the guide mechanism 5.
In fig. 3, the actuator element 41 has a wire 41a, a fixed end 41b, an output end 41c, and a heat generating wire 41 d. The wires 41a are the polymer fibers described above. The heating wire 41d is also a part of the energy increasing and decreasing device 71. The heating wire 41d is also an energy transmission component for increasing or decreasing the energy of the wire 41 a. The heat generating wire 41d is directly or indirectly disposed on the surface of the wire 41 a. The heating wire 41d is spiral or coil-shaped. The heat generating wire 41d is a metal wire that generates heat by being energized. The heat generating wire 41d can be provided by a platinum wire, a copper wire, or the like. The heat generating wire 41d is provided by a nichrome wire. The heat generating wire 41d can be provided by a round wire, a square wire, or a metal foil. The heating wire 41d is attached to the surface of the wire 41 a.
The heat generating line 41d generates heat when energized. The heat supplied through the heat generating wire 41d is transferred to the wire 41a, and the temperature of the wire 41a is increased. On the other hand, the heat generation line 41d stops generating heat when the energization is turned off. The heat of the wire 41a is radiated to the external environment. At this time, the third coupling mechanism 31a and the guide mechanism 5 at the output end 41c contribute to heat dissipation. Therefore, a large temperature difference can be achieved in the actuator element 41.
Fig. 4 illustrates a control process 180 for causing the driven body 31 to perform a swinging motion. The control process 180 is a part of the control process in the control device 70.
In step 181, it is determined whether or not the swing of the movable device 1 is requested (ON) or not (OFF). For example, when the scanning type infrared sensor is required to be operated, the scanning type infrared sensor is turned ON by wobbling. When the scanning type infrared sensor is not required to be operated, the swing is OFF. In the case of the swing OFF, the control is ended. In the case of the wobble ON, the process proceeds to loop processing of step 182 and step 183. Step 182 is a process for heating the first actuator element 41. Step 183 is a process for heating the second actuator element 42. By alternately repeating step 182 and step 183, the driven body 31 swings. In step 184, it is determined whether or not the swing of the movable device 1 is requested (ON) or not (OFF).
Step 182 is a process of rotating the driven body 31 in the normal rotation direction. The normal rotation direction is a direction in which the driven body 31 is rotated clockwise when viewed from the first actuator element 41. Step 182 includes step 185 and step 186.
In step 185, first, the first actuator element 41 is activated. In step 185, the heat generating line 41d of the first actuator element 41 is energized. Specifically, the controller 70 supplies power from the energy increasing/decreasing device 71 to the heat-generating line 41 d. The process of step 185 is executed so that the first actuator element 41 outputs a torsion of a predetermined angle in the normal rotation direction. For example, step 185 is continued until the rotation angle sensor detects the rotation angle of the driven body 31 and obtains rotation of a predetermined angle. Alternatively, the processing of step 185 may be continued for a certain time by timer processing.
In step 186, the first actuator element 41 is deactivated. In step 186, the energization of the heat generating line 41d of the first actuator element 41 is cut off. Specifically, the controller 70 cuts off the power supply to the heat generating line 41d from the energy increasing/decreasing device 71.
Step 183 is a process of rotating the driven body 31 in the reverse direction. Step 183 has step 187 and step 188.
In step 187, first, the second actuator element 42 is activated. In step 187, the heat generating wire of the second actuator element 42 is energized. Specifically, the controller 70 supplies power from the energy increasing/decreasing device 72 to the heat generating line.
In step 188, the second actuator element 42 is deactivated. In step 188, the energization of the heat generating line of the second actuator element 42 is cut off. Specifically, the controller 70 cuts off the power supply to the heat generating line from the energy increasing/decreasing device 72.
In this embodiment, the activation corresponds to energization to the heat generating line 41 d. The failure corresponds to the interruption of the energization to the heat generating line 41 d. Activating and deactivating the pair of terms can correspond to heating and cooling the pair of terms, loading and unloading the pair of terms, active and standby.
The control device 70 controls the energy increasing/decreasing device 71 so as to alternately repeat the period in which the energy of the actuator element 41 increases and the period in which the energy of the actuator element 41 decreases. As a result, the two actuator elements 41, 42 are alternately actively driven. When the first actuator element 41 actively outputs torsional deformation in the normal rotation direction, the second actuator element 42 is passively driven in the normal rotation direction. Conversely, when the second actuator element 42 actively outputs torsional deformation in the reverse direction, the first actuator element 41 is passively driven in the reverse direction. Since the two actuator elements 41, 42 are used and driven alternately, stable rotational output can be obtained in both directions.
According to the embodiment described above, a quiet movable device 1 can be provided. This is particularly advantageous when the movable device 1 is used in a device installed indoors. For example, a silent scanning infrared sensor can be obtained. Since the movable device 1 includes the guide mechanism 5, the vibration of the driven body 31 can be suppressed. In particular, vibrations in the direction intersecting with the pivot axis AXR, that is, in the vertical direction and the horizontal direction with respect to the pivot axis AXR can be suppressed. Since the guide mechanism 5 defines the rotation axis AXR coaxial with the actuator axis AX41, the torsional deformation of the actuator element 41 can be taken out directly. Furthermore, the guide mechanism 5 contributes to heat dissipation of the actuator element 41.
Fig. 5 shows a calibration process 190 in the manufacturing method or the adjustment method of the movable device. Each step is performed by a manufacturer or an operator. The correction process 190 provides a setting process of setting a reference for deformation when the actuator elements 41, 42 are located at the reference positions. The correction process 190 corrects the reference position.
The correction process 190 determines in step 191 whether or not correction of the reference position is necessary. In the case where correction is not necessary, the processing is ended. In the event that correction is required, step 192 is entered.
In step 192, the fixing portions 21, 22 are operated in such a manner as to release (a part of) the fixing ends 41b of the actuator elements 41, 42. The coupling mechanism 21d is operated so as to allow the actuator elements 41 and 42 to rotate about the actuator axes AX41 and AX42, that is, so as to release the fixing force. The actuator elements 41, 42 are disabled in a state where the fixed end 41b is released. This allows the driven body 31 to rotate without being restricted by the fixing portions 21 and 22. Therefore, step 192 provides a process of releasing the fixed end 41b and a process of deactivating the actuator elements 41, 42 in a state where the fixed end 41b is released.
In step 193, the actuator elements 41, 42 are positioned in the reference positions. During step 193, the fixed end 41b is released. Also during step 193, the actuator elements 41, 42 are in a failed state. Therefore, step 193 provides a process of positioning the actuator elements 41, 42 at the reference positions in a state where the fixed end 41b is released and the actuator elements 41, 42 are disabled.
In step 194, the fixing portions 21, 22 are operated in such a manner as to fix the fixed ends 41b of the actuator elements 41, 42. During step 194, the actuator elements 41, 42 are positioned in the reference positions. Therefore, step 194 provides a process of fixing the fixed end 41b in a state where the actuator elements 41, 42 are positioned at the reference positions.
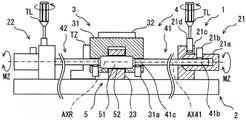
Fig. 6 shows the movable device 1 in step 193. The fixing force in the fixing portions 21, 22 is variable. The fixing force is variable manually. The fixing portions 21 and 22 can be switched between a fixed state in which the fixing end 41b is fixed and a released state in which the fixing end 41b is released.
The fixing force by the fixing portions 21 and 22 is variable by the coupling mechanism 21 d. The coupling mechanism 21d can be adjusted using the tool TL. Specifically, when the set bolt is loosened using the tool TL, the fixing force is weakened. When the set bolt is loosened, the end socket 21a can be rotated about the actuator shaft AX 41. When the positioning bolt is tightened with the tool TL, the fixing force is increased. When the set bolt is tightened, the end socket 21a is fixed in a manner unable to rotate about the actuator axis AX 41.
In step 193, the reference position determiner TZ is utilized. The reference position determiner TZ is brought into contact with the base 2 and the driven body 31, and fixes the posture of the driven body 31 with respect to the base 2 at a reference position. Thereby, the actuator elements 41 and 42 fixed to the driven body 31 are also positioned at the reference positions. In this embodiment, the position at which the element 32 points in the prescribed direction is the reference position.
Fig. 7 shows a state in step 193. The fixing portions 21, 22 release the actuator elements 41, 42. The reference position determiner TZ abuts on the driven body 31. In this way, the movable device 1 includes the reference position determiner TZ. The reference position determiner TZ positions the actuator elements 41, 42 at the reference positions when the fixing force based on the fixing portions 21, 22 is weakened and the actuator elements 41, 42 are movable in the direction of deformation.
According to this embodiment, the moving steps 182, 183 and the setting step 190 are provided. In the moving step, the actuator elements 41 and 42 are activated in a state where the fixed ends 41b, which are part of the actuator elements 41 and 42, are fixed. In this way, the driven body 31 connected to the output end 41c, which is the other part of the actuator elements 41 and 42, is moved in the moving step by the deformation of the actuator elements 41 and 42. The setting process sets the reference of the deformation when the actuator elements 41, 42 are located at the reference positions. The setting process is also referred to as an initial value setting process.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the reference position determiner TZ is used. Instead, this embodiment includes an automatic return function for automatically moving the driven body 31 to the reference position. The automatic recovery function is realized by the reference position determiner 2TZ as a counterweight.
As shown in fig. 8, the driven body 31 includes a reference position determiner 2TZ as a weight. The reference position determiner 2TZ rotates the driven body 31 by gravity. The calibration process includes a step of positioning the base 2 in a reference state, for example, a horizontal state. Then, the fixing force by the fixing portions 21, 22 is released. Thereby, the reference position determiner TZ rotates the driven body 31 by gravity. The actuator elements 41, 42 rotate together with the driven body 31 and are positioned at the reference positions. In this embodiment, the reference position determiner 2TZ also positions the actuator elements 41, 42 at the reference positions when the fixing force based on the fixing portions 21, 22 is weakened and the actuator elements 41, 42 are movable in the direction of deformation.
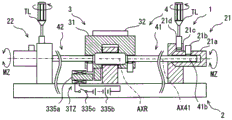
An embodiment as a modification of the above embodiment will be described. In the above embodiment, gravity is used to provide the automatic recovery function. Instead, in this embodiment, the electric reference position determiner 3TZ is used to stop the driven body 31 at the reference position.
As shown in fig. 9, the reference position determiner 3TZ includes an electromagnet 335a fixed to the base. The electromagnet 335a draws a magnetic portion provided on the driven body 31 when excited. Thereby, the driven body 31 is positioned at the reference position. Likewise, the actuator elements 41, 42 are also positioned in the reference positions. The reference position determiner 3TZ includes a power supply 335b for exciting the electromagnet 335a and a switch 335 c. The switch 335c is operated by manual or automatic control.
The reference position determiner 3TZ positions the actuator elements 41, 42 at the reference positions by electrical control from the outside. The reference position determiner 3TZ may also be controlled by the control device 70. In this case, step 193 is executed by control device 70. In this embodiment, the reference position determiner 3TZ also positions the actuator elements 41, 42 at the reference positions when the fixing force based on the fixing portions 21, 22 is weakened and the actuator elements 41, 42 are movable in the direction of deformation.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the fixing portions 21 and 22 are switched between the fixing state and the releasing state by manual operation by an operator. Instead, in this embodiment, the fixing portions 421 and 422 that can be electrically switched between a fixing state and a releasing state are used.
In fig. 10, the movable device 1 includes fixing portions 421 and 422. The fixing force in the fixing portions 421, 422 is electrically variable from the outside. The movable device 1 includes a reference position determiner 3 TZ. The reference position determiner 3TZ is controlled by the control device 70.
The fixing portions 421, 422 can be provided by various means. The fixing portions 421 and 422 can be provided by a clutch mechanism that utilizes electric power-based heat or electromagnetic force-based change in viscosity of fluid, for example. More specifically, a hot wax whose viscosity can be adjusted by electric heating, or a magneto-viscous fluid whose viscosity can be adjusted by electrically adjusting an electromagnetic force can be used. The fixing portions 421 and 422 can be provided by, for example, an electromagnetic clutch capable of electrically adjusting the electromagnetic force to mechanically adjust the fixing force.
The control system 7 has a manual switch 473 for instructing the correction process. The manual switch 473 is provided indoors. The manual switch 473 operates with the correction processing performed.
In fig. 11, the fixing portion 421 includes a case 421 e. The fixed end 41b is rotatably housed in the case 421 e. A sleeve 421f as a friction member is fixed to the fixed end 41 b. A hot wax 421g is provided between the inner surface of the casing 421e and the sleeve 421 f. The hot wax 421g is solid at room temperature or room temperature, and the fixed end 41b is fixed. The fixing portion 421 has a heating means 421h for heating the hot wax 421 g. The heating member 421h can be provided by various means such as an electric wire for generating joule heat, or a high-frequency coil for electromagnetically generating heat from the sleeve 421 f. The hot wax 421g liquefies when heated by the heating means 421h, and releases the fixed end 41 b.
In fig. 12, the correction process 490 is executed by the control device 70. Step 491 corresponds to step 191. Here, it is determined whether or not the manual switch 473 is operated. If the manual switch 473 is not operated, the processing is ended. If the manual switch 473 is operated, the routine proceeds to step 492.
Step 492 corresponds to step 192. In step 492, the fixing portions 421 and 422 are controlled to be released. The heating means 421h of the fixing portions 421 and 422 are energized to liquefy the hot wax 421 g. Thereby, the actuator element 41 is rotatable about the actuator axis AX 41.
Step 493 corresponds to step 193. In step 492, the reference position determiner 3TZ is excited to position the driven body 31 and the actuator elements 41 and 42 at the reference positions.
Step 494 corresponds to step 194. In step 494, the fixing portions 421, 422 are controlled to be in a fixed state. Here, the energization of the heating means 421h is cut off, and the hot wax 421g is solidified. Thereby, the actuator element 41 is fixed around the actuator shaft AX 41.
According to this embodiment, the moving steps 182 and 183 and the correction process 490 as the setting step are provided. The correction process 490 can be provided by electrical control. Therefore, the correction process 490 can be automated. Furthermore, the calibration process 490 may also be fully automated. For example, in this embodiment, whether the correction process is required is indicated by the manual switch 473. Instead, it can be automatically determined whether the correction process 490 is required. For example, the correction process 490 may be executed at regular intervals. Alternatively, the detection signal of the element 32 may be evaluated to determine whether the correction process 490 is necessary.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the fixing portions 421, 422 are opened and closed in synchronization with the active drive control of the actuator elements 41, 42. In addition, when the actuator elements 41 and 42 are protected, the fixing portions 421 and 422 may be controlled to be released.
In fig. 13, the protection process 590 protects the actuator elements 41, 42 from excessive deformation caused by external forces. In step 595, whether or not an external force is applied to the driven body 31 or the actuator elements 41 and 42 is detected, and it is determined whether or not the detected external force is present. If it is determined at step 595 that there is no external force, the routine proceeds to step 596. If it is determined at step 595 that there is an external force, the routine proceeds to step 597.
For example, when a detection signal opposite to the detection signal expected along the scanning direction is obtained from the element 32, it is determined that the driven body 31 is moved in the opposite direction by the external force, and it can be determined that the external force is present. Further, when an attempt to operate the driven body 31 from the outside is detected, it may be determined that there is an external force. For example, when the housing accommodating the movable device 1 is removed, it can be determined that there is an external force.
In step 596, the fixed portions 421 and 422 are controlled to be in a fixed state by closing the fixed portions 421 and 422. Thereby, the fixed end 41b is fixed, and the actuator elements 41 and 42 are normally used.
In step 597, the fixing portions 421 and 422 are controlled to be released by opening the fixing portions 421 and 422. This releases the fixed end 41b, and the actuator elements 41 and 42 can freely rotate without restriction. In the process, utilization of the actuator elements 41, 42 is disabled by repeating steps 595, 597. These processes provide a prohibition portion that prohibits the utilization of the actuator elements 41, 42.
According to this embodiment, the actuator elements 41 and 42 can be prevented from being forcibly twisted by an external force, and therefore the actuator elements 41 and 42 are protected. Further, the protection process 590 can be executed on the basis of the previous embodiment or the subsequent embodiment, or can be executed only by the protection process 590.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, two actuator elements 41, 42 are utilized. Alternatively, only one actuator element 41 may be provided. In this case, a passive rotation mechanism can be used instead of the second actuator element 42. The passive rotation mechanism can be provided by various mechanisms such as a rubber, resin spring, metal spring, and air spring. The passive turning mechanism is referred to as a return mechanism.
In fig. 14, the movable device 1 has a return mechanism 622 instead of the second actuator element 42. The return mechanism 622 includes a passive elastic member 661, a fixing portion 662, and a fixing portion 663. The fixing portion 662 is a block fixed to the base 2. The fixed portion 663 is fixed to the driven body 31.
The elastic member 661 is a metal coil spring. The elastic member 661 is stretched from the free state, and thereby a counterclockwise force is applied to the driven body 31. The elastic member 661 sets one end of the rotation range M631 of the driven body 31 as a reference position. The elastic member 661 is disposed so as to be stretched by the twisting motion of the actuator element 41. The elastic member 661 exerts a return force against the rotational force in the direction of the arrow M41. As a result, by intermittently driving the actuator element 41, in other words, by periodically repeating the activated state and the deactivated state, the driven body 31 performs the rotational motion in the rotational range M631.
In this embodiment, the second coupling mechanism 21d can also adjust the fixing force in order to set the reference position (zero point position) of the actuator element 41. The second coupling mechanism 21d can be operated by the tool TL. The driven body 31 can be positioned at the reference position by the reference position determiner TZ.
The operation of setting the reference position can include three stages. First, the second coupling mechanism 21d is released by the tool TL, thereby releasing the fixing portion 21. Thereby, the fixed end 41b can be rotated in the rotation direction. Next, the driven body 31 and the actuator element 41 are positioned at the reference position by the reference position determiner TZ. Thereby, the position of the fixed end 41b around the actuator axis AX41 is adjusted to the reference position. Finally, the fixing portion 21 is fixed by fastening the second coupling mechanism 21d with a tool TL. Thereby, the fixing portion 21 fixes the fixed end 41 b. The electric fixing portions 421, 521, and 621 described in the previous embodiments can be used as the fixing portion 21. As the reference position determiner TZ, the reference position determiners 2TZ and 3TZ described in the previous embodiment can be used.
According to this embodiment, the operation of the driven body 31 reciprocating can be obtained by one actuator element 41. Further, since the guide mechanism 5 is provided, the driven body 31 is stable. The structure of this embodiment can also be utilized in other embodiments described above.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the fixing portion is set to the released state for adjustment or protection. Instead, this embodiment also controls the fixed portion to be released in normal use.
In fig. 15, the movable device 1 includes fixing portions 421 and 422. The control device 70 can switch the fixing portions 421 and 422 between the fixing state and the releasing state. Then, the control device 70 executes a control process 780 for swinging the driven body 31. The first fixing portion 421 exerts a fixing force stronger than that of the second fixing portion 422 when the first actuator element 41 is deformed. The second fixing portion 422 exerts a fixing force stronger than that of the first fixing portion 421 when the second actuator element 42 is deformed.
In fig. 16, the control process 780 further has steps 789a, 789b, 789c, and 789d in addition to the control process 180. Steps 789a, 789b, 789c and 789d adjust the fixing force for their fixing 421, 422 complementarily in synchronism with the plurality of actuator elements 41, 42.
Step 182 is performed in a state where a part of the first actuator element 41, i.e., the fixed end 41b is fixed. In step 182, the first actuator element 41 is activated. Step 182 provides a first moving step of moving the driven body 31 connected to the output end 41c, which is the other portion of the first actuator element 41, by the deformation of the first actuator element 41.
Step 182 includes step 789a and step 789 b. In step 789a, the fixed end 41b of the first actuator element 41 is fixed. Step 789b provides for the process of releasing a portion, i.e., the fixed end, of the second actuator element 42.
In step 183, the process is performed in a state where a part of the second actuator element 42, that is, a fixed end is fixed. In step 183, the second actuator element 42 is activated. Step 183 provides a second moving step of moving the driven body 31 connected to the output terminal, which is the other part of the second actuator element 42, by the deformation of the first actuator element 42.
Step 183 includes step 789c and step 789 d. Step 789c secures a portion of the second actuator element 41. Step 789d provides for releasing a portion of the first actuator element 41, i.e., the fixed end 41 b.
As a result, the first actuator element 41 is released when the second actuator element 42 is actively driven. As a result, the load of the second actuator element 42 is suppressed.
In fig. 17, the state in step 182 is illustrated. In the state of step 182, the first actuator element 41 is actively driven. At this point, the second actuator element 42 is released. The second actuator element 42 rotates in the direction of arrow M41. As a result, when the first actuator element 41 is actively driven, the load of the first actuator element 41 is suppressed.
In fig. 18, the state in step 183 is illustrated. In the state of step 183, the second actuator element 42 is actively driven. At this point, the first actuator element 41 is released. The first actuator element 41 is rotated in the direction of arrow M42. As a result, when the second actuator element 42 is actively driven, the load of the second actuator element 42 is suppressed.
According to this embodiment, the load of the complementary actuator elements 41, 42 can be suppressed. As a result, a stable amplitude can be achieved. In this embodiment, during the moving step by one of the actuator elements, the other actuator element is invalidated. Instead, the other actuator element may be deactivated only at the initial stage, only at the middle stage, or only at the later stage of the moving process by the one actuator element. For example, the fixed portion may be controlled so that the other actuator element passively rotates within a predetermined angle. The control method of this embodiment can also be used in the previous embodiments.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the fixing portions 421 and 422 use thermal wax. Instead, in this embodiment, a magneto-viscous fluid whose viscosity can be adjusted by electrical adjustment of electromagnetic force is used.
In fig. 19, the fixed end 41b is rotatably housed in a case 821 e. A sleeve 821f as a friction member is fixed to the fixed end 41 b. A magnetic viscous fluid 821g is provided between the inner surface of the housing 821e and the sleeve 821 f. The magnetic viscous fluid 821g behaves as a fluid in a weak magnetic field or a zero magnetic field, and behaves as a solid in a strong magnetic field.
The fixing portion 421 has an electromagnet 821 h. The electromagnet 821h causes a magnetic field to act between the housing 821e and the sleeve 821 f. The magnetic viscous fluid 821g is expressed as liquid when the electromagnet 821h is not excited, and releases the fixed end 41 b. When the magnetic viscous fluid 821g is placed in a magnetic field by the electromagnet 821h, the case 821e and the sleeve 821f are coupled to each other, and the fixed end 41b is fixed.
The electromagnetic clutch of this embodiment can be used as the fixing portions 421, 422 of the previous embodiments. The electromagnetic clutch of the present embodiment is of a normally open type in which the fixed end 41b is released when no current is applied, but may be of a normally closed type in which the fixed end 41b is fixed when no current is applied.
An embodiment as a modification of the above embodiment will be described. In the above embodiment, the fixing portions 421 and 422 use thermal wax. Instead, in this embodiment, an electromagnetic clutch capable of mechanically adjusting the fixing force by electrical adjustment of the electromagnetic force is used.
In fig. 20, the fixed end 41b is rotatably housed in a housing 921 e. A sleeve 921f as a friction member is fixed to the fixed end 41 b. An armature 921g as a friction member is disposed so as to face the sleeve 921 f. The armature 921g engages with the housing 921e in the rotational direction. The armature 921g is movable along the actuator shaft AX 41. The armature 921g contacts the sleeve 921f to fix the sleeve 921f and the fixed end 41 b. The armature 921g is separated from the sleeve 921f, and the sleeve 921f and the fixed end 41b are released.
The fixing portion 421 has an electromagnet 921 h. The electromagnet 921h attracts the armature 921 g. When the electromagnet 921h is not excited, the armature 921g contacts the sleeve 921f to fix the fixed end 41 b. When the electromagnet 921h is excited, the armature 921g is separated from the sleeve 921f, and the fixed end 41b is released.
The electromagnetic clutch of this embodiment can be used as the fixing portions 421, 422 of the previous embodiments. The electromagnetic clutch of the present embodiment is of a normally closed type in which the fixed end 41b is fixed when not energized, but may be of a normally open type in which the fixed end 41b is released when not energized.
The disclosure in the present specification is not limited to the illustrated embodiments. The disclosure includes illustrative embodiments and variations that may occur to those skilled in the art based on the description of the embodiments. For example, the disclosure is not limited to the combinations of the components and/or elements shown in the embodiments. The disclosure can be implemented in various combinations. The disclosure can have additional parts that can be added to the embodiments. The disclosure includes the omission of components and/or elements of the embodiments. The disclosure includes permutations or combinations of parts and/or elements between one embodiment and other embodiments. The technical scope of the present invention is not limited to the description of the embodiments.
In the previous embodiments, the guide mechanism 5 is provided by the shaft 51 and the guide hole 52. The shaft 51 and the guide hole 52 provide a so-called bearing mechanism. The bearing mechanism for providing the guide mechanism 5 can be provided by a large number of mechanisms such as a ball bearing, a fluid bearing, and a magnetic bearing, in addition to the slide bearing as in the embodiment. In this embodiment, a relatively simple and lightweight slide bearing is employed in consideration of the upper limit of the rotational torque that can be output by the actuator elements 41, 42.
In the above embodiments, the shaft 51, which is separate from the driven body 31, is fixed thereto. Alternatively, the driven body 31 or the support portion 23 may be integrally formed with a shaft. For example, a cylindrical portion can be formed in place of the shaft 51 on the driven body 31 or the support portion 23 by machining. Alternatively, a cylindrical portion instead of the shaft 51 may be insert-molded into the driven body 31 or the support portion 23.
In the above embodiments, the movable device 1 includes the guide mechanism 5. Instead, the driven body 31 may be supported by the actuator elements 41 and 42 and the connecting member without providing the guide mechanism 5. The connection member having a wound shape can perform stable rotation of the driven body 31. In the foregoing embodiments, the guide mechanism 5 has the shaft 51 and the guide hole 52. Alternatively, a guide mechanism for suspending the driven body like a vibrator or a guide mechanism for supporting the driven body with a fulcrum like an inverted vibrator may be used.
In at least one of the above embodiments, the control of the actuator elements 41, 42 is synchronized with the control of the fixing portions 421, 422 by electrical control. Instead, the fixed part may include a mechanism for mechanically regulating the rotation direction. For example, a ratchet mechanism may be provided in the fixing portion. The ratchet mechanism fixes the fixed end 41b, for example, when the fixed end 41b rotates in the direction of the arrow M42. Conversely, when the fixed end 41b is rotated in the direction of the arrow M41, the fixed end 41b is released. The ratchet mechanism is set to a fixed state in a manner allowing active deformation and set to a released state in a manner invalidating passive deformation.
In the previous embodiment, the fixing force by the fixing portions 21, 22, 421, 422 can be changed to the released state and the fixed state. Alternatively, the strength of the fixing force may be changed. For example, the coupling mechanism 21d may be switched between a state of being strongly fastened to the outer peripheral surface of the end sleeve 21a and a state of being weakly pressed against the outer peripheral surface of the end sleeve 21 a. In this case, the end socket 21a rotates while rubbing against the positioning bolt.
In the previous embodiment, the fixing force generated by the fixing portions 21 and 421 provided for the fixing end 41b is variable. Alternatively, the fixing force at the output end 41c may be made variable. In this case, the coupling mechanism 31a for the output end 41c can be operated. In addition, an electrically controllable fixing portion 421 may be provided for the output terminal 41 c.
In the above embodiment, the heat generating wire 41d is directly wound around the wire 41 a. Alternatively, a member may be disposed between the wire 41a and the heat generating line 41 d. For example, a support member having electrical insulation and excellent thermal conductivity can be disposed. The support member may be provided by insulating paper wound around the wire 41a or a glass tube accommodating the wire 41a therein. As described above, in one embodiment, the heat generation line 41d directly contacts the wire rod 41a, but in the other embodiment, the heat generation line 41d has a wound shape without directly contacting the wire rod 41 a. The heat generating member may be disposed on the inner surface of the support member.
In the previous embodiment, the increase and decrease of the energy of the wire 41a is realized by heating and heat dissipation based on the heat generating wire 41 d. Instead, the energy of the wire rod 41a can be increased or decreased by cooling or cooling by the cooling device. For example, a peltier element may be disposed along the wire 41 a. The peltier element provides the energy transfer component. In this case, the wire rod 41a undergoes thermal expansion or thermal contraction when cooled, and undergoes torsional deformation.
In the previous embodiment, a nichrome wire was used as the heat generating wire 41 d. Alternatively, the energy transfer component can be provided by a variety of electrically heat generating components. For example, the heat generating member may be provided by a conductive thin film called a conductive polymer or a conductive metal film. In this case, the film is formed on the surface of the wire 41 a. For example, the conductive polymer or the conductive metal film is formed on the surface of the wire rod 41a by various methods such as plating, synthesis, sputtering, and the like. The shape is a spiral shape wound around the wire rod 41 a. Alternatively, a spiral heat generating member may be formed by winding a band-shaped conductive polymer or conductive metal film formed separately from the wire 41a, and disposed outside the wire 41 a.
Although the present disclosure has been described with reference to the embodiments, it should be understood that the present disclosure is not limited to the above-described embodiments and configurations of the present invention. Rather, the present disclosure includes various modifications, and variations within the equivalent scope. Various elements of the present disclosure are shown in various combinations and modes, but other combinations and modes including more elements or less elements than these elements, or only one of them also fall within the scope or idea of the present disclosure.
Claims (7)
1. A movable device is characterized by comprising:
an actuator element that generates torsional deformation by increase and decrease of energy;
a fixing portion (21, 22, 421, 422) that fixes a part of the actuator element with respect to the direction of the torsional deformation, and whose fixing force is variable;
a driven body (31) coupled to the other part of the actuator element; and
a reference position determiner (TZ, 2TZ, 3TZ) that positions the actuator element at a reference position when the fixing force based on the fixing portion is weakened and the actuator element is movable with respect to the direction of the torsional deformation,
the actuator element has a first actuator element (41) and a second actuator element (42) that drive the driven body in a forward direction and a reverse direction that are opposite to each other and are coaxial with the rotation direction of the driven body,
the fixing portion has a first fixing portion that fixes a part of the first actuator element and a second fixing portion that fixes a part of the second actuator element.
2. The movable device of claim 1,
the first fixing portion exerts a fixing force stronger than that of the second fixing portion when the first actuator element is deformed,
when the second actuator element is deformed, the second fixing portion exerts a fixing force stronger than that of the first fixing portion.
3. Movable device according to claim 1 or 2,
the fixing device is also provided with a control device (70) for electrically adjusting the fixing force of the fixing part from the outside.
4. Movable device according to claim 1 or 2,
the fixing part is an electrically controllable fixing part as follows: a part of the actuator element is fixed using a hot wax capable of adjusting viscosity by electric heating, a magneto-viscous fluid capable of adjusting viscosity by electric adjustment of electromagnetic force, or an electromagnetic clutch capable of mechanically adjusting fixing force by electric adjustment of electromagnetic force.
5. Movable device according to claim 1 or 2,
the fixing portion is switchable between a fixing state that fixes a part of the actuator element and a release state that releases the part of the actuator element.
6. Movable device according to claim 1 or 2,
the actuator element is a synthetic fibre.
7. A method for controlling a movable device, comprising the steps of:
a first movement step (182) of activating a first actuator element (41) in a state in which a part (41b) of the first actuator element is fixed, and moving a driven body (31) connected to another part (41c) of the first actuator element by deformation of the first actuator element;
a second movement step (183) in which a second actuator element (42) is activated in a state in which a part of the second actuator element is fixed, and a driven body (31) connected to another part of the second actuator element is moved by deformation of the second actuator element; and
a setting process (190) of positioning the first actuator element and the second actuator element at reference positions when the fixing force of the first actuator element and the second actuator element is weakened and the first actuator element and the second actuator element are movable in a direction of deformation,
the first moving step has a step (789b) of releasing the part of the second actuator element,
the second moving step includes a step (789c) of releasing the part of the first actuator element.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-057942 | 2017-03-23 | ||
| JP2017057942A JP2018161010A (en) | 2017-03-23 | 2017-03-23 | Movable device, manufacturing method of movable device, and control method of movable device |
| PCT/JP2018/008673 WO2018173743A1 (en) | 2017-03-23 | 2018-03-07 | Movable device, production method therefor, and control method therefor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110431304A CN110431304A (en) | 2019-11-08 |
| CN110431304B true CN110431304B (en) | 2021-01-01 |
Family
ID=63586423
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880018764.XA Expired - Fee Related CN110431304B (en) | 2017-03-23 | 2018-03-07 | Movable device and control method of movable device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP2018161010A (en) |
| CN (1) | CN110431304B (en) |
| WO (1) | WO2018173743A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6841115B2 (en) | 2017-03-23 | 2021-03-10 | 株式会社デンソー | Movable device |
| GB2623348B (en) * | 2022-10-13 | 2025-03-26 | Cambridge Mechatronics Ltd | SMA actuator assembly |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102859468A (en) * | 2010-01-18 | 2013-01-02 | 原子能及能源替代委员会 | Fluidic actuator and display device having fluidic actuators |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6945045B2 (en) * | 2001-10-01 | 2005-09-20 | Minolta Co., Ltd. | Driving apparatus |
| JP3638016B2 (en) * | 2001-10-01 | 2005-04-13 | コニカミノルタフォトイメージング株式会社 | Drive device and drive control method using shape memory alloy |
| EP1613872B1 (en) * | 2003-04-17 | 2007-04-04 | Victhom Human Bionics Inc. | High power/weight ratio braking device based on shape memory material technology |
| JP2007092556A (en) * | 2005-09-27 | 2007-04-12 | Konica Minolta Opto Inc | Drive device and its manufacturing method |
| CN101624974B (en) * | 2008-09-28 | 2011-01-19 | 哈尔滨工业大学 | Shape memory alloy driving torque output structure |
| CN102136391B (en) * | 2010-01-26 | 2013-09-11 | 厦门市恒源新电力设备有限公司 | Electromagnetic mechanism of vacuum contactor |
| CN101839268B (en) * | 2010-05-27 | 2012-09-05 | 南京晨光集团有限责任公司 | Numerical control hydraulic power unit based on magnetic control shape memory alloy |
| JP2013542784A (en) * | 2010-10-22 | 2013-11-28 | ゴア エンタープライズ ホールディングス,インコーポレイティド | Catheter with shape memory alloy actuator |
| JP5533634B2 (en) * | 2010-12-21 | 2014-06-25 | トヨタ車体株式会社 | Gear rotation lock mechanism |
| JP2012227998A (en) * | 2011-04-15 | 2012-11-15 | Konica Minolta Advanced Layers Inc | Manufacturing method and manufacturing apparatus |
| JP2013114028A (en) * | 2011-11-29 | 2013-06-10 | Konica Minolta Advanced Layers Inc | Driving device |
| US8797703B2 (en) * | 2012-03-15 | 2014-08-05 | GM Global Technology Operations LLC | Active material actuator having a magnetorheological overload protector |
| EP3082248A3 (en) * | 2012-08-01 | 2016-12-07 | The Board of Regents,The University of Texas System | Coiled and non-coiled twisted nanofiber yarn and polymer fiber torsional and tensile actuators |
| US9021801B2 (en) * | 2012-08-31 | 2015-05-05 | GM Global Technology Operations LLC | Compensating for incomplete reversal in mechanisms incorporating shape memory alloy wire |
| US9638176B2 (en) * | 2013-05-10 | 2017-05-02 | The Boeing Company | Vortex generator using shape memory alloys |
| CN103647369B (en) * | 2013-12-24 | 2016-05-18 | 北京航空航天大学 | The spiral-shaped memorial alloy electric rotating machine of a kind of change |
| WO2016064220A1 (en) * | 2014-10-22 | 2016-04-28 | 한양대학교 산학협력단 | Rotation-type actuator actuated by temperature fluctuation or temperature gradient and energy harvesting device using same |
| JP6111438B1 (en) * | 2015-08-04 | 2017-04-12 | パナソニックIpマネジメント株式会社 | Actuator |
| JP6714858B2 (en) * | 2016-09-12 | 2020-07-01 | 株式会社デンソー | Actuator device |
| WO2018055972A1 (en) * | 2016-09-20 | 2018-03-29 | 株式会社デンソー | Actuator device |
-
2017
- 2017-03-23 JP JP2017057942A patent/JP2018161010A/en active Pending
-
2018
- 2018-03-07 WO PCT/JP2018/008673 patent/WO2018173743A1/en active Application Filing
- 2018-03-07 CN CN201880018764.XA patent/CN110431304B/en not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102859468A (en) * | 2010-01-18 | 2013-01-02 | 原子能及能源替代委员会 | Fluidic actuator and display device having fluidic actuators |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018161010A (en) | 2018-10-11 |
| WO2018173743A1 (en) | 2018-09-27 |
| CN110431304A (en) | 2019-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6714858B2 (en) | Actuator device | |
| US7703281B2 (en) | Motor, motor device, and lens drive mechanism using the same | |
| CN110431304B (en) | Movable device and control method of movable device | |
| US11025178B2 (en) | Actuator device | |
| CN110462209B (en) | Movable device | |
| JP2021511477A (en) | Heat exchange system | |
| US11002256B2 (en) | Movable device | |
| WO2018055972A1 (en) | Actuator device | |
| US8220259B1 (en) | Shape-memory alloy actuator | |
| WO2017085880A1 (en) | Variable hardness actuator | |
| WO2018173746A1 (en) | Movable device | |
| CN111602089A (en) | Variable iris device with shape memory alloy elements | |
| Yan et al. | Towards autonomous printable robotics: Design and prototyping of the mechanical logic | |
| WO2018173744A1 (en) | Movable device | |
| CN205602149U (en) | Unmanned aerial vehicle | |
| WO2019159754A1 (en) | Actuator device | |
| JP7091888B2 (en) | Actuator device | |
| JP4161045B2 (en) | Shape memory alloy actuator | |
| WO2024098220A1 (en) | Anti-shake mechanism, camera module and portable terminal | |
| CN111344940A (en) | Movable device | |
| JPH10113887A (en) | Micromanipulator and driving thereof | |
| Williams et al. | Design of a two degree of freedom shape memory alloy actuator for mirror positioning | |
| JP2020188578A (en) | Actuator device | |
| CN112433332A (en) | Driving device, camera device and electronic equipment | |
| JPH072196A (en) | Thermal louver |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20210101 |