CN110386552B - 用于控制负载的运动的控制装置和方法 - Google Patents
用于控制负载的运动的控制装置和方法 Download PDFInfo
- Publication number
- CN110386552B CN110386552B CN201910302694.7A CN201910302694A CN110386552B CN 110386552 B CN110386552 B CN 110386552B CN 201910302694 A CN201910302694 A CN 201910302694A CN 110386552 B CN110386552 B CN 110386552B
- Authority
- CN
- China
- Prior art keywords
- impulse response
- finite impulse
- filter
- response filter
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/06—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads
- B66C13/063—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for minimising or preventing longitudinal or transverse swinging of loads electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/16—Applications of indicating, registering, or weighing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Program control
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Complex Calculations (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
本发明公开了一种用于控制承载装置的负载的运动的控制装置。承载装置可以例如是起重机,并且负载可以通过连接到起重机的悬挂点的绳索被承载。控制装置包括:输入接口,用于接收指示负载的目标速度的输入信号;输出接口,用于提供指示悬挂点的参考速度的输出信号;以及处理系统,构成用于基于输入信号生成输出信号的信号处理路径。信号处理路径包括至少一个有限脉冲响应滤波器,所述至少一个有限脉冲响应滤波器用于抑制其频率为负载的固有摆动频率的信号分量。由于有限的脉冲响应,由滤波器引起的稳定效应和尾端效应的时间长度是有限且确定的。
Description
技术领域
本公开总体涉及运动控制。更具体地,本公开涉及一种用于控制负载的运动的装置和方法,该负载非刚性地连接到其速度和位置可控的悬挂点。此外,本公开涉及用于操纵负载的系统。该系统可以例如是但不一定是起重机。此外,本公开涉及一种用于控制负载的运动的计算机程序,其中所述负载非刚性地连接到其速度和位置可控的悬挂点。
背景技术
不期望的摆动是影响许多机械系统的性能的问题,在所述机械系统中,负载非刚性地连接到其速度和位置受控的悬挂点。例如,当悬挂点移动时,负载有摆动的趋势。摆动的趋势可能代表损坏负载和/或其周围环境的风险,和/或可能通过迫使机械系统缓慢操作而降低生产率。机械系统可以例如是起重机,所述起重机包括起重机托架,负载通过悬挂绳索从该起重机托架悬挂。起重机操作者通过连接到控制单元的控制终端提供速度指令,该控制单元控制起重机托架的速度。在上述类型的起重机应用中,负载摆动特别是在自动起重机中以及在没有技术人员控制负载的运动的起重机中是一个问题。
已知的事实是,可以通过增加加速和减速斜坡时间并使用长S曲线速度整形(即,限制加速度的时间导数,即,限制急冲)来减小负载摆动。这种方法的固有挑战是响应和稳定时间可能会增加到不可接受的水平。
另一种方法是在基于模型的负载的运动控制中使用摆动角度传感器并且利用摆动角度传感器的输出信号。该模型可以基于经典牛顿动力学的运动方程。然而,在许多情况下,希望避免诸如可能在起重机有时必须操作的恶劣环境条件下易受损坏的摆动角度传感器之类的仪表。
存在公开的开环方法,其不需要摆动角度传感器,并且其基于钟摆式,钟摆式基于经典牛顿动力学。在出版物WO9411293中描述了基于钟摆式的示例性开环方法。与这些开环方法相关的挑战是所述方法对诸如绳索长度和钩子与负载质心之间的距离的模型参数中的误差的敏感性。
发明内容
以下呈现简化的发明内容以提供对不同发明实施例的一些方面的基本理解。该发明内容不是对本发明的广泛综述。该发明内容既不旨在标识本发明的关键或重要元素,也不旨在界限本发明的范围。以下发明内容仅以简化形式呈现本发明作为对本发明的示例性和非限制性实施例的更详细描述的序言的一些概念。
根据本发明,提供了一种用于控制负载的运动的新型控制装置,该负载非刚性地连接到其速度和位置是可控的悬挂点。悬挂点可以例如但不是必然地是起重机的一部分,并且负载可以用悬挂绳索自悬挂点悬挂。
根据本发明的控制装置包括:输入接口,所述输入接口用于接收指示负载的目标速度的输入信号;输出接口,所述输出接口用于提供指示悬挂点的参考速度的输出信号;以及处理系统,所述处理系统构成用于基于输入信号生成输出信号的信号处理路径,其中信号处理路径包括至少一个有限脉冲响应“FIR”滤波器,所述至少一个有限脉冲响应“FIR”滤波器用于抑制其频率为负载的固有摆动频率的信号分量。
由于上述至少一个有限脉冲响应滤波器,悬挂点的速度基本上没有频率分量来激励负载的摆动。由于上述滤波器具有有限脉冲响应,因此滤波器引起的稳定效应和尾端效应的时间长度是有限且确定的。为了提高鲁棒性,克服非刚性的连接性能变化,例如,克服绳索长度的变化,信号处理路径有利地设置成具有阻带,该阻带的宽度覆盖固有摆动频率的变化范围。
根据本发明,还提供了一种用于操纵负载的新型系统。根据本发明的系统包括承载装置和根据本发明的控制装置,其中该承载装置包括用于承载负载的悬挂点以及用于移动悬挂点的可控驱动器,其中所述负载非刚性地连接到悬挂点,所述控制装置用于接收指示负载的目标速度的输入信号并且用于提供指示悬挂点的参考速度的输出信号给可控驱动器。
上述承载装置可以例如是用于使用连接到悬挂点的悬挂绳索来承载负载的起重机。
根据本发明,还提供了一种用于控制负载的运动的新型方法,该负载非刚性地连接到其速度和位置可控的悬挂点。根据本发明的方法包括:接收指示负载的目标速度的输入信号,将输入信号提供给信号处理路径,以生成指示悬挂点的参考速度的输出信号,并根据信号处理路径的输出信号控制悬挂点的运动,其中所述信号处理路径包括至少一个有限脉冲响应滤波器,所述至少一个有限脉冲响应滤波器用于抑制其频率为负载的固有摆动频率的信号分量。
根据本发明,还提供了一种用于控制负载的运动的新型计算机程序,该负载非刚性地连接到其速度和位置可控的悬挂点。根据本发明的计算机程序包括计算机可执行指令,所述计算机可执行指令用于控制可编程处理器以:构成信号处理路径,接收指示负载的目标速度的输入信号,将输入信号提供给信号处理路径以生成指示悬挂点的参考速度的输出信号,并根据信号处理路径的输出信号控制悬挂点的运动,其中计算机程序包括用于配置信号处理路径以包括至少一个有限脉冲响应滤波器的计算机可执行指令,所述至少一个有限脉冲响应滤波器用于抑制其频率为负载的固有摆动频率的信号分量。
根据本发明,还提供了一种新型计算机程序产品。该计算机程序产品包括编码有根据本发明的计算机程序的非易失性计算机可读介质,例如,光盘“CD”。
在随附的从属权利要求中描述了本发明的各种示例性和非限制性实施例。
当结合附图阅读时,从以下具体示例性实施例的描述中,可以最好地理解本发明的示例性和非限制性实施例,无论是结构还是操作方法,以及其他目的和优点。
动词“包括”和“包含”在本文中用作开放限制,其既不排除也不要求存在未记载的特征。除非另有明确说明,从属权利要求中所述的特征可相互自由组合。此外,应该理解,在整个文件中使用“一个”或“一”(即,单数形式),并不排除多个。
附图说明
下面参考附图更详细地说明本发明的示例性和非限制性实施例及其优点,其中:
图1示出了根据本发明的示例性和非限制性实施例的用于操纵负载的系统;
图2a和图2b示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的控制装置;
图3示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的控制装置;
图4a和图4b示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的控制装置;
图5a和图5b示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的控制装置;以及
图6示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的方法的流程图。
具体实施方式
以下描述中提供的具体示例不应被解释为限制所附权利要求的范围和/或适用性。除非另有明确说明,否则以下描述中提供示例的列表和组并非详尽无遗。
图1示出了根据本发明的示例性和非限制性实施例的用于操纵负载109的系统。该系统包括承载装置107,该承载装置107包括用于承载负载109的悬挂点108,所述负载非刚性地连接到悬挂点。承载装置107包括可控驱动器106,用于在坐标系199的x轴线的正方向和负方向上移动悬挂点108。在该示例性情况下,承载装置107是用于通过悬挂绳索110承载负载109的起重机,其中所述悬挂绳索110连接到悬挂点108。该系统包括根据本发明的示例性和非限制性实施例的控制装置101,所述控制装置用于根据由控制终端105提供的输入信号控制可控驱动器106。在这个示例性情况下,输入信号是负载109的目标速度vload,T。在图1中,负载109的实际速度被表示为vload。输入信号也可以例如是通过已知的数学关系表示负载109的目标速度的目标位置或目标加速度。
控制装置101包括输入接口102,用于接收指示负载109的目标速度的输入信号。控制装置101包括输出接口103,用于向可控驱动器106提供指示悬挂点108的参考速度vSP,ref的输出信号。在该示例性情况下,输出信号是悬挂点108的参考速度vSP,ref。输出信号也可以例如是通过已知的数学关系表示悬挂点108的参考速度的参考位置或参考加速度。在图1中,悬挂点108的实际速度被表示为vSP。控制装置101包括处理系统104,所述处理系统104构成用于基于输入信号生成输出信号的信号处理路径。信号处理路径包括有限脉冲响应“FIR”滤波器,用于抑制其频率是负载109的固有摆动频率的信号分量。因此,悬挂点108的速度vSP基本上没有激励负载109的摆动的频率分量。由于上述滤波器具有有限的脉冲响应,因此由滤波器引起的安稳效应和尾端效应的时间长度是有限且确定的。
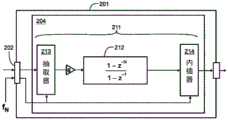
图2a示出了根据本发明的示例性和非限制性实施例的控制装置201。控制装置201包括构成信号处理路径211的处理系统204。在该示例性情况中,信号处理路径211包括有限脉冲响应“FIR”滤波器212,所述FIR滤波器是移动平均滤波器,所述移动平均滤波器的z域转移函数为1+z-1+z-2+z-3+...+z-(N-1)。FIR滤波器212的零频率增益(即,DC增益)是N,因为在DC处z=1。信号处理路径211包括用于将信号处理路径211的总增益设置在合适的水平的增益g。增益g可以例如是1/N以补偿FIR滤波器212的DC增益。信号处理路径211还包括在FIR滤波器212前面的抽取器213和在FIR滤波器之后的内插器214。抽取器213使FIR滤波器212的采样率小于输入信号的采样率,并且内插器214使输出信号的采样率大于FIR滤波器212的采样率。有利地,内插器214包括用于从控制装置201的输出信号中抑制FIR滤波器212的输出频谱的图像的滤波器。抽取器213可以设有抗混叠滤波器,以用于防止抽取器213的输出信号中的混叠效应。
图2b中示出了信号处理路径211的幅度响应(即,频率响应的绝对值)。频率轴线上的传递零点的位置(即,幅度响应的零点)取决于控制装置201的输入信号的采样率fs、FIR滤波器212的长度N、和抽取率ND,以使得传递零点的频率是n×fs/(N×ND),其中n是非零整数。内插比对传递零点的频率没有类似的影响,这是因为原则上内插在FIR滤波器212的时间离散输出信号的连续值之间增加了内插值,但是没有改变FIR滤波器212的采样率。在示例性情况下,控制装置201的输入信号的采样率是1kHz,FIR滤波器212的长度N是100,并且抽取率是40。在该示例性情况下,FIR滤波器212的时间长度是100×40×1ms=4秒,并因此FIR滤波器212在频率n×0.25Hz处具有传递零点,其中n是非零整数。当悬挂绳索110的长度约为4米时,第一传递零点频率0.25Hz基本上是负载109的固有摆动频率fN。固有摆动频率fN可以通过以下等式估算:

其中g是重力加速度≈9.82m/s2,并且l是悬挂绳索110的长度。有利地选择FIR滤波器212的第一传递零点的频率以与最小固有摆动频率(即,对应于悬挂绳索110的最大长度的固有摆动频率)相同或略小于所述固有摆动频率。
在根据本发明的示例性和非限制性实施例的控制装置中,控制装置的输入接口202被配置为接收指示固有摆动频率fN的数据。处理系统204被配置为根据固有摆动频率的变化来改变抽取器213的抽取率ND。上述数据可以表示例如固有摆动频率fN的值或悬挂绳索110的长度l,基于所述悬挂绳索110的长度l,可以根据上述等式1计算固有摆动频率fN。可以选择抽取率ND以使得第一传递零点的频率fs/(N×ND)与固有摆动频率fN相同或略小于固有摆动频率fN。内插比有利地与抽取率ND一起改变,以便在控制装置的输出处具有恒定的采样率。
图3示出了根据本发明的示例性和非限制性实施例的控制装置301。控制装置301包括构成信号处理路径311的处理系统304。在该示例性情况中,信号处理路径311包括FIR滤波器312,所述FIR滤波器312是移动平均滤波器,所述移动平均滤波器的z域传递函数为1+z-1+z-2+z-3+...+z-(N1+N2-1)。在该示例性情况中,信号处理路径311包括输入整形器315,用于限制提供给FIR滤波器312的滤波器输入信号的变化率。输入整形器315被配置为限制滤波器输入信号和滤波器输入信号的延迟版本(delayed version)之间的差的绝对值。在图3所示的示例性情况中,滤波器输入信号和滤波器输入信号的延迟版本之间的时间段是FIR滤波器312的N1个操作周期,并且上述差的绝对值被限制为最大Δmax。输入整形器315是非线性的,并且因此该输入整形器315可以产生新的频率分量,在某些情况下,所述频率分量可能出现在负载的固有摆动频率处或所述固有摆动频率附近。然而,FIR滤波器312抑制其频率是固有摆动频率的信号分量,并且因此消除了由输入整形器315引起的可能的不希望的激励效应。因此,可以在FIR滤波器312的上游插入任何合适的非线性输入整形器。可选地,也可以将输入整形器插入到FIR滤波器312中。在信号处理路径311包括多个FIR滤波器的示例性和非限制性情况下,输入整形器可以被插入在信号流的方向上是第一个的FIR滤波器中。输入整形器315执行加速和减速斜坡,这例如在速度逆转期间可能是必须的。
从图2b中可以看出,移动平均FIR滤波器的第一边带上(即,第一传递零点与第二传递零点之间)的最差点衰减非常小。因此,在许多情况下,需要根据负载的固有摆动频率来改变传递零点的频率。如上所述,可以例如通过调整在FIR滤波器前面执行的抽取函数来改变传递零点的频率。另一种方法是使用用于在FIR滤波器的连续传递零点之间的一个或多个频带上设置额外衰减的额外的滤波器。图4a示出了根据本发明的示例性和非限制性实施例的控制装置401。控制装置401包括构成信号处理路径411的处理系统404。在该示例性情况中,信号处理路径411包括FIR滤波器412,所述FIR滤波器412包括两个串联连接的FIR滤波器412a和412b。也可能存在三个或更多个串联连接的FIR滤波器。FIR滤波器412的脉冲响应是FIR滤波器412a和412b的脉冲响应的卷积。在图4a所示的示例性情况中,FIR滤波器412a是z域传递函数为1+z-1+z-2+...+z-(N1+N2-1)的移动平均滤波器,并且FIR滤波器412b是z域转移函数为1+z-1+z-2+...+z-(N3-1)的移动平均滤波器。在示例性情况下,FIR滤波器412a的长度N1+N2为100,而FIR滤波器412b的长度N3为71,并且因此FIR滤波器412a和412b的串联连接的z域传递函数是:

其中g是用于将信号处理路径411的总增益设定在适当水平的增益。增益g可以例如是1/7100,以补偿FIR滤波器412a和412b的DC增益100和71。
在上述示例性情况中,FIR滤波器412b的第一传递零点大致位于FIR滤波器412a的第一传递零点与第二传递零点之间的频带的中间。FIR滤波器412a和412b的幅度响应以及FIR滤波器412a和412b的串联连接的幅度响应在图4b中被示出。FIR滤波器412a的幅度响应由附图标记416表示,FIR滤波器412b的幅度响应由附图标记417表示,并且FIR滤波器412a和412b的串联连接的幅度响应由附图标记418表示。在具有三个串联的移动平均FIR滤波器的示例性情况中,滤波器中的两个最短的滤波器的长度可以例如是滤波器中的最长滤波器的长度的0.82倍和0.62倍。这种选择在滤波器中的最长滤波器的第一传递零点以上的频率区域上提供良好的衰减。
移动平均FIR滤波器的串联连接的脉冲响应在时域中是对称的,并且所述脉冲响应可以非常长。因此,在某些情况下,控制装置的响应等待时间可能太长。因此,在某些情况下,有利的是用脉冲响应在时域中不对称的FIR滤波器或无限脉冲响应“IIR”滤波器代替移动平均FIR滤波器,以使得脉冲响应在脉冲响应的开始部分中具有该脉冲响应的大部分能量。具有不对称脉冲响应的滤波器可以例如是最小相位滤波器。
图5a示出了根据本发明的示例性和非限制性实施例的控制装置501。控制装置501包括构成信号处理路径511的处理系统504。在该示例性情况中,信号处理路径511包括FIR滤波器512,所述是FIR滤波器512是z域传递函数为1+z-1+z-2+z-3+...+z-(N1+N2-1)的移动平均滤波器。此外,信号处理路径511包括带阻滤波器519,所述带阻滤波器519在有限脉冲响应滤波器512的第一边带上具有阻带。带阻滤波器519位于内插器214的下游,并且因此带阻滤波器519的采样率是内插器214的输出采样率。在图5a中,z-1表示对应于FIR滤波器512的采样率的一个采样间隔的延迟,并且Z-1表示对应于带阻滤波器519的采样率的一个采样间隔的延迟。带阻滤波器519可以例如是IIR滤波器,所述IIR滤波器在Z域中的传递函数是:

其中P(Z-1)和Q(Z-1)是Z-1的多项式。然而,带阻滤波器也可以位于内插器214的上游,在这种情况下,带阻滤波器的采样率与FIR滤波器的采样率相同。
带阻滤波器519可以例如是具有以下拉普拉斯域传递函数的时间连续滤波器的时间离散等效物:

其中s是拉普拉斯变量,ωz是传递零点的频率,即陷波频率,并且k是阻尼因子,借助于该阻尼因子可以调整频率响应的形状。阻尼因子k可以例如通过实验来调整。在一些示例性情况中,已经证明1.7是阻尼因子k的合适值。由公式3表示的时间连续传递函数可借助于合适的转换规则被转换为其时间离散等效物。例如,以下梯形规则将左半部分s平面映射到Z平面的原点居中单位圆的内部:

其中T是对应于带阻滤波器519的采样率的采样间隔的时间长度。图5b示出了在FIR滤波器512的长度N1+N2为100并且带阻滤波器519是时间连续滤波器的时间离散等效物的情况下FIR滤波器512和带阻滤波器519的组合的幅度响应,即,频率响应的绝对值,带阻滤波器519的传递函数基于公式3,其中陷波频率ωz在FIR滤波器512的第一传递零点与第二传递零之间,并且阻尼因子k是1.7。
还可以将带阻滤波器519的陷波频率ωz选择为与最大绳索长度对应的固有摆动频率,并将FIR滤波器512设计为其第一传递零点处于对应于最大绳索长度的一半的固有摆动频率下的移动平均滤波器。这使得操作更快,但是可以在对应于短绳长度的固有摆动频率下提供较小的阻尼。
还可以直接在Z域中设计带阻滤波器519。例如,二阶IIR带阻滤波器的Z域传递函数可以是:

其中zz=ejωzT、zz *=e-jωzT、zz=rpejωpT、zz *=rpe-jωpT,ωz是陷波频率,T是对应于带阻滤波器519的采样率的采样间隔的时间长度,rp是极半径,ωp是极点频率,j是虚数单位,并且g是可以选择的系数,例如使得零点频率处的增益(即,DC增益)具有期望值。由于zz和zz *是彼此的复共轭,并且相应地zp和zp *是彼此的复共轭,因此由等式5表示的传递函数可以以具有实值系数的形式呈现。可以通过调整极半径rp和极点频率ωp来调整频率响应的形状。
根据本发明的示例性和非限制性实施例的控制装置的处理系统(例如,附图中所示的处理系统104、204、304、404和504)可以通过一个或多个处理器电路来实施,所述处理器电路中的每一个都可以是设有适当软件的可编程处理器电路、专用硬件处理器(例如,专用集成电路“ASIC”)、或可配置的硬件处理器(诸如例如,现场可编程门阵列“FPGA”)。此外,处理系统可以包括一个或多个存储器装置,每一个存储器装置可以例如是随机存取存储器“RAM”电路。
上述控制装置101、201、301、401和501是包括以下所述的控制装置的示例:
用于接收指示负载的目标速度的输入信号的装置,所述负载非刚性地连接到其速度和位置是可控的悬挂点;
用于形成信号处理路径的装置,所述装置包括用于抑制其频率是负载的固有摆动频率的信号分量有限脉冲响应滤波器;
用于将输入信号提供给信号处理路径以生成指示悬挂点的参考速度的输出信号的装置;和
用于根据信号处理路径的输出信号控制悬挂点的运动的装置。
图6示出了根据本发明的示例性和非限制性实施例的用于控制负载的运动的方法的流程图,该负载非刚性地连接到其速度和位置可控的悬挂点。该方法包括以下动作:
动作601:接收指示负载的目标速度的输入信号;
动作602:将输入信号提供给信号处理路径以生成指示悬挂点的参考速度的输出信号,该信号处理路径包括用于抑制其频率为负载的固有摆动频率的信号分量的至少一个有限脉冲响应滤波器;和
动作603:根据信号处理路径的输出信号控制悬挂点的运动。
在根据本发明的示例性和非限制性实施例的方法中,至少一个有限脉冲响应滤波器在负载的固有摆动频率处或所述固有摆动频率附近具有传递零点。在根据本发明的示例性和非限制性实施例的方法中,至少一个有限脉冲响应滤波器包括移动平均滤波器。
在根据本发明的示例性和非限制性实施例的方法中,至少一个有限脉冲响应滤波器包括至少两个串联或并联连接的有限脉冲响应滤波器。有限脉冲响应滤波器的串联连接的脉冲响应是串联连接的有限脉冲响应滤波器的脉冲响应的卷积。在根据本发明的示例性和非限制性实施例的方法中,至少两个有限脉冲响应滤波器包括移动平均滤波器。
在根据本发明的示例性和非限制性实施例的方法中,信号处理路径包括带阻滤波器,该带阻滤波器在至少一个有限脉冲响应滤波器的第一边带上具有阻带。在根据本发明的示例性和非限制性实施例的方法中,带阻滤波器是无限脉冲响应滤波器。在根据本发明的示例性和非限制性实施例的方法中,带阻滤波器是最小相位滤波器。
在根据本发明的示例性和非限制性实施例的方法中,信号处理路径包括位于至少一个有限脉冲响应滤波器前面的抽取器和位于至少一个有限脉冲响应滤波器之后的内插器。抽取器使至少一个有限脉冲响应滤波器的采样率小于输入信号的采样率,而内插器使输出信号的采样率大于至少一个有限脉冲响应滤波器的采样率。
根据本发明的示例性和非限制性实施例的方法包括接收指示固有摆动频率的数据并根据固有摆动频率的变化来改变上述抽取器的抽取率。
在根据本发明的示例性和非限制性实施例的方法中,信号处理路径包括输入整形器,所述输入整形器限制提供给至少一个有限脉冲响应滤波器的滤波器输入信号的变化率。输入整形器有利地插入在至少一个有限脉冲响应滤波器的上游,或者输入整形器集成到至少一个有限脉冲响应滤波器中的第一个有限脉冲响应滤波器中。在根据本发明的示例性和非限制性实施例的方法中,输入整形器限制滤波器输入信号与滤波器输入信号的延迟版本之间的差的绝对值。
根据本发明的示例性和非限制性实施例的计算机程序包括用于控制可编程处理器以执行与根据本发明的任何上述示例性和非限制性实施例的方法有关的动作的计算机可执行指令。
根据本发明的示例性和非限制性实施例的计算机程序包括用于控制负载的运动的软件模块,该负载非刚性地连接到其速度和位置可控的悬挂点。软件模块包括用于控制可编程处理器以执行以下操作的计算机可执行指令:
构成信号处理路径,所述信号处理路径包括用于抑制其频率为负载的固有摆动频率的信号分量的至少一个有限脉冲响应滤波器;
接收指示负载目标速度的输入信号;
将输入信号提供给信号处理路径以生成指示悬挂点的参考速度的输出信号;和
根据信号处理路径的输出信号控制悬挂点的运动。
上述软件模块可以例如是通过适合于所考虑的可编程处理器的编程语言实现的子程序和/或函数。
根据本发明的示例性和非限制性实施例的计算机程序产品包括计算机可读介质,例如计算机光盘“CD”所述光盘使用根据本发明的示例性实施例的用计算机程序编码。
根据本发明的示例性和非限制性实施例的信号被编码以携带根据本发明的示例性实施例定义的计算机程序的信息。
在以上给出的描述中提供的非限制性具体示例不应被解释为限制所附权利要求的范围和/或适用性。此外,除非另有明确说明,否则本文中提供的任何列表或示例组都不是详尽无遗的。
虽然已经关于本发明的具体实施例说明和描述了本发明,但是本领域普通技术人员应该理解,在不脱离本公开的精神和范围的情况下,可以对本发明进行各种修改。
Claims (19)
1.一种控制装置,用于控制非刚性地连接到悬挂点的负载的运动,所述控制装置包括:
输入接口,所述输入接口用于接收指示所述负载的目标速度的输入信号;
输出接口,所述输出接口用于提供指示所述悬挂点的参考速度的输出信号;和
处理系统,所述处理系统构成用于根据所述输入信号生成所述输出信号的信号处理路径,
其中所述信号处理路径包括至少一个有限脉冲响应滤波器,所述至少一个脉冲响应滤波器用于抑制其频率是所述负载的固有摆动频率的信号分量,
其中,所述信号处理路径包括位于所述至少一个有限脉冲响应滤波器前面的抽取器和位于所述至少一个有限脉冲响应滤波器之后的内插器,所述抽取器使所述至少一个有限脉冲响应滤波器的采样率小于所述输入信号的采样率,而所述内插器使所述输出信号的采样率大于所述至少一个有限脉冲响应滤波器的采样率。
2.根据权利要求1所述的控制装置,其中,所述至少一个有限脉冲响应滤波器包括彼此串联或并联连接的多于一个的有限脉冲响应滤波器。
3.根据权利要求1所述的控制装置,其中,所述至少一个有限脉冲响应滤波器在所述负载的固有摆动频率处或所述固有摆动频率附近具有传递零点。
4.根据权利要求1所述的控制装置,其中,所述至少一个有限脉冲响应滤波器包括移动平均滤波器。
5.根据权利要求1所述的控制装置,其中,所述信号处理路径还包括至少一个带阻滤波器,所述带阻滤波器具有在所述至少一个有限脉冲响应滤波器的第一边带上的阻带,所述至少一个带阻滤波器与所述至少一个有限脉冲响应滤波器串联连接,所述至少一个带阻滤波器布置在所述至少一个有限脉冲响应滤波器的下游,并且所述至少一个带阻滤波器包括无限脉冲响应滤波器。
6.根据权利要求1所述的控制装置,其中,所述输入接口被配置为接收指示所述固有摆动频率的数据,并且所述处理系统被配置为根据所述固有摆动频率的变化来改变所述抽取器的抽取率。
7.根据权利要求1所述的控制装置,其中,所述信号处理路径包括用于限制提供给所述至少一个有限脉冲响应滤波器的滤波器输入信号的变化率的输入整形器,所述输入整形器插入在所述至少一个有限脉冲响应滤波器的上游或被集成到所述至少一个有限脉冲响应滤波器中的在沿信号流方向上是第一的第一个有限脉冲响应滤波器中。
8.根据权利要求7所述的控制装置,其中,所述输入整形器被配置为限制所述滤波器输入信号的延迟版本与所述滤波器输入信号之间的差的绝对值。
9.一种用于操纵负载的系统,所述系统包括:
承载装置,所述承载装置包括用于承载负载的悬挂点和用于移动所述悬挂点的可控驱动器,其中所述负载非刚性地连接到所述悬挂点;以及
控制装置,所述控制装置用于接收指示所述负载的目标速度的输入信号,并且用于向所述可控驱动器提供指示所述悬挂点的参考速度的输出信号,
其中所述控制装置包括:
输入接口,所述输入接口用于接收所述输入信号;
输出接口,所述输出接口用于将所述输出信号提供给所述可控驱动器;以及
处理系统,所述处理系统构成用于基于所述输入信号生成所述输出信号的信号处理路径,所述信号处理路径包括至少一个有限脉冲响应滤波器,所述至少一个有限脉冲响应滤波器用于抑制其频率为负载的固有摆动频率的信号分量,
其中所述信号处理路径包括位于所述至少一个有限脉冲响应滤波器前面的抽取器和位于所述至少一个有限脉冲响应滤波器之后的内插器,所述抽取器使所述至少一个有限脉冲响应滤波器的采样率小于所述输入信号的采样率,而所述内插器使所述输出信号的采样率大于所述至少一个有限脉冲响应滤波器的采样率。
10.根据权利要求9所述的系统,其中,所述承载装置是用于承载所述负载的起重机,所述起重机具有连接到所述悬挂点的悬挂绳索。
11.一种用于控制非刚性地连接到悬挂点的负载的运动的方法,所述方法包括:
接收指示所述负载的目标速度的输入信号;
将所述输入信号提供给信号处理路径,以生成指示悬挂点的参考速度的输出信号,和
根据所述信号处理路径的输出信号控制所述悬挂点的运动,
其中所述信号处理路径包括至少一个有限脉冲响应滤波器,所述至少一个有限脉冲响应滤波器用于抑制其频率为所述负载的固有摆动频率的信号分量,
所述信号处理路径包括位于所述至少一个有限脉冲响应滤波器前面的抽取器和位于所述至少一个有限脉冲响应滤波器之后的内插器,所述抽取器使所述至少一个有限脉冲响应滤波器的采样率小于所述输入信号的采样率,而所述内插器使所述输出信号的采样率大于所述至少一个有限脉冲响应滤波器的采样率。
12.根据权利要求11所述的方法,其中,所述至少一个有限脉冲响应滤波器包括彼此串联或并联连接的多于一个的有限脉冲响应滤波器。
13.根据权利要求11所述的方法,其中,所述至少一个有限脉冲响应滤波器具有在所述负载的固有摆动频率处或所述固有摆动频率附近的传递零点。
14.根据权利要求11所述的方法,其中,所述至少一个有限脉冲响应滤波器包括移动平均滤波器。
15.根据权利要求11所述的方法,其中,所述信号处理路径还包括至少一个带阻滤波器,所述带阻滤波器具有在所述至少一个有限脉冲响应滤波器的第一边带上的阻带,所述至少一个带阻滤波器与所述至少一个有限脉冲响应滤波器串联连接,所述至少一个带阻滤波器布置在所述至少一个有限脉冲响应滤波器的下游,并且所述至少一个带阻滤波器包括无限脉冲响应过滤器。
16.根据权利要求11所述的方法,其中,所述方法包括:
接收指示所述固有摆动频率的数据,并根据所述固有摆动频率的变化来改变所述抽取器的抽取率。
17.根据权利要求11所述的方法,其中,所述信号处理路径包括输入整形器,所述输入整形器限制提供给所述至少一个有限脉冲响应滤波器的滤波器输入信号的变化率,所述输入整形器插入所述至少一个有限脉冲响应滤波器的上游,或者被集成到所述至少一个有限脉冲响应滤波器中的在信号流方向上是第一的第一个有限脉冲响应滤波器中。
18.根据权利要求17所述的方法,其中,所述输入整形器限制所述滤波器输入信号的延迟版本与所述滤波器输入信号之间的差的绝对值。
19.一种非易失性计算机可读介质,所述非易失性计算机可读介质被编码有用于控制非刚性地连接到悬挂点的负载的运动的计算机程序,所述计算机程序包括用于控制可编程处理器以执行以下操作的计算机可执行指令:
构成信号处理路径;
接收指示所述负载目标速度的输入信号;
将所述输入信号提供给所述信号处理路径以生成指示所述悬挂点的参考速度的输出信号;和
根据所述信号处理路径的输出信号控制所述悬挂点的运动,
其中所述计算机程序包括计算机可执行指令,所述计算机可执行指令用于配置所述信号处理路径,以包括至少一个有限脉冲响应滤波器,所述至少一个有限脉冲响应滤波器用于抑制其频率为负载的固有摆动频率的信号分量,
其中,所述信号处理路径包括位于所述至少一个有限脉冲响应滤波器前面的抽取器和位于所述至少一个有限脉冲响应滤波器之后的内插器,所述抽取器使所述至少一个有限脉冲响应滤波器的采样率小于所述输入信号的采样率,而所述内插器使所述输出信号的采样率大于所述至少一个有限脉冲响应滤波器的采样率。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/955,141 US10696523B2 (en) | 2018-04-17 | 2018-04-17 | Control device and method for controlling motion of a load |
| US15/955,141 | 2018-04-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110386552A CN110386552A (zh) | 2019-10-29 |
| CN110386552B true CN110386552B (zh) | 2020-08-28 |
Family
ID=68053208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910302694.7A Active CN110386552B (zh) | 2018-04-17 | 2019-04-15 | 用于控制负载的运动的控制装置和方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10696523B2 (zh) |
| CN (1) | CN110386552B (zh) |
| DE (1) | DE102019107677A1 (zh) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020126504A1 (de) | 2020-10-09 | 2022-04-14 | Liebherr-Werk Biberach Gmbh | Hebezeug wie Kran sowie Verfahren und Vorrichtung zum Steuern eines solchen Hebezeugs |
| CN113336097B (zh) * | 2021-06-30 | 2023-08-22 | 三一汽车起重机械有限公司 | 起重机回转控制的方法、装置、电子设备及存储介质 |
| WO2024120198A1 (en) * | 2022-12-06 | 2024-06-13 | Huawei Technologies Co., Ltd. | Method for load tracking and related device |
| CN117208759B (zh) * | 2023-09-28 | 2026-03-24 | 沈阳理工大学 | 塔吊、滤波器设计方法、计算机装置、可读存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI91517B (fi) * | 1992-11-17 | 1994-03-31 | Kimmo Hytoenen | Menetelmä harmonisesti värähtelevän taakan ohjaamiseksi |
| US5960969A (en) * | 1996-01-26 | 1999-10-05 | Habisohn; Chris Xavier | Method for damping load oscillations on a crane |
| CN103998367A (zh) * | 2011-09-20 | 2014-08-20 | 科恩起重机有限公司 | 起重机控制 |
| US9385737B1 (en) * | 2014-12-11 | 2016-07-05 | Maxin Integrated Products, Inc. | Adaptive correction of interleaving errors in time-interleaved analog-to-digital converters |
| CN106927366A (zh) * | 2017-02-10 | 2017-07-07 | 武汉港迪智能技术有限公司 | 一种桥门式起重机开环防摇方法 |
| CN106959610A (zh) * | 2017-04-05 | 2017-07-18 | 山东大学 | 桥式吊车系统apd‑smc控制器、桥式吊车系统及控制方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1993008115A1 (fr) * | 1991-10-18 | 1993-04-29 | Kabushiki Kaisha Yaskawa Denki | Procede et dispositif destines a empecher la deviation d'un cable de grue |
| US5359542A (en) * | 1991-12-20 | 1994-10-25 | The Boeing Company | Variable parameter collision avoidance system for aircraft work platforms |
| DE10201202B4 (de) * | 2002-01-14 | 2009-11-26 | Otmar Fahrion | Dockeinheit zur Wartung eines Flugzeuges oder dgl. |
| WO2008076500A2 (en) * | 2006-10-24 | 2008-06-26 | 3M Innovative Properties Company | Stock roll direct load system |
| US7367464B1 (en) * | 2007-01-30 | 2008-05-06 | The United States Of America As Represented By The Secretary Of The Navy | Pendulation control system with active rider block tagline system for shipboard cranes |
| WO2008099611A1 (ja) * | 2007-02-14 | 2008-08-21 | Gogou Co., Ltd. | 移動制御方法、移動操作装置及び移動体の移動を操作する方法 |
| US7725287B2 (en) * | 2007-07-27 | 2010-05-25 | Tm Ge Automation Systems, Llc | System and method for using structured shapes to increase laser scanner accuracy |
| US20090164345A1 (en) * | 2007-12-21 | 2009-06-25 | Tideworks Technology, Inc. | System and method for management and control of containerized freight |
| SI2398621T1 (sl) * | 2009-01-20 | 2019-08-30 | Lasercoil Technologies, Llc | Lasersko rezanje iz transportnega sistema navitega tračnega profila |
| US8352128B2 (en) * | 2009-09-25 | 2013-01-08 | TMEIC Corp. | Dynamic protective envelope for crane suspended loads |
-
2018
- 2018-04-17 US US15/955,141 patent/US10696523B2/en active Active
-
2019
- 2019-03-26 DE DE102019107677.3A patent/DE102019107677A1/de active Pending
- 2019-04-15 CN CN201910302694.7A patent/CN110386552B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FI91517B (fi) * | 1992-11-17 | 1994-03-31 | Kimmo Hytoenen | Menetelmä harmonisesti värähtelevän taakan ohjaamiseksi |
| US5960969A (en) * | 1996-01-26 | 1999-10-05 | Habisohn; Chris Xavier | Method for damping load oscillations on a crane |
| CN103998367A (zh) * | 2011-09-20 | 2014-08-20 | 科恩起重机有限公司 | 起重机控制 |
| US9385737B1 (en) * | 2014-12-11 | 2016-07-05 | Maxin Integrated Products, Inc. | Adaptive correction of interleaving errors in time-interleaved analog-to-digital converters |
| CN106927366A (zh) * | 2017-02-10 | 2017-07-07 | 武汉港迪智能技术有限公司 | 一种桥门式起重机开环防摇方法 |
| CN106959610A (zh) * | 2017-04-05 | 2017-07-18 | 山东大学 | 桥式吊车系统apd‑smc控制器、桥式吊车系统及控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10696523B2 (en) | 2020-06-30 |
| US20190315601A1 (en) | 2019-10-17 |
| CN110386552A (zh) | 2019-10-29 |
| DE102019107677A1 (de) | 2019-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110386552B (zh) | 用于控制负载的运动的控制装置和方法 | |
| JP6192559B2 (ja) | クレーン装置 | |
| JP5899547B2 (ja) | 電動機の制御装置 | |
| KR101606963B1 (ko) | 광학식 손떨림 보정 장치의 액추에이터 제어 장치, 방법 및 이를 이용한 광학식 손떨림 보정 장치 | |
| JP5825953B2 (ja) | 電気機械フライトアクチュエーションシステムの多重速度コントローラのための統合型アップサンプラー及びフィルタリング | |
| CN111347418B (zh) | 一种电控伺服系统控制的方法、电控伺服系统及机器人 | |
| JP4311043B2 (ja) | 電動機の制御装置 | |
| CN101103517B (zh) | 电动机控制装置 | |
| JP6118988B2 (ja) | モータ駆動装置 | |
| US9354441B2 (en) | Method for adapting the parameters of a controller for micromechanical actuators, and device | |
| JP5469949B2 (ja) | 電動機械の制御装置 | |
| US9310606B2 (en) | Controller for actuating a micromechanical actuator, actuating system for actuating a micromechanical actuator, micro-mirror system and method for actuating a micromechanical actuator | |
| JP6018403B2 (ja) | スプリングリターン機構付きボイスコイルモータの駆動回路、それを用いたレンズモジュールおよび電子機器 | |
| KR20160093257A (ko) | 손떨림 보정 장치 및 이를 포함하는 카메라 모듈 | |
| EP0774176B1 (en) | Filter, repetitive control system and learning control system both provided with such filter | |
| KR102149391B1 (ko) | 손떨림 보정 장치 및 이를 포함하는 카메라 모듈 | |
| Zhang et al. | A Method of Enhancing Fast Steering Mirror’s Ability of Anti‐Disturbance Based on Adaptive Robust Control | |
| JP5425044B2 (ja) | 適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法 | |
| JP6524673B2 (ja) | 回路装置、物理量検出装置、電子機器及び移動体 | |
| CN108775373B (zh) | 一种伺服电机与负载多级传动系统的振动抑制方法 | |
| JP2015114221A (ja) | 信号処理装置、検出装置、センサー、電子機器及び移動体 | |
| CN108233922B (zh) | 振动台反馈信号分频段移相系统 | |
| CN106292555B (zh) | 用于包装、灌装或配料的控制系统及方法 | |
| JP2010220278A (ja) | 電動機制御装置 | |
| CN108254147B (zh) | 振动台反馈信号分频段调幅系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |