CN108720731B - 用于运行自主行进的车辆的方法 - Google Patents
用于运行自主行进的车辆的方法 Download PDFInfo
- Publication number
- CN108720731B CN108720731B CN201810336966.0A CN201810336966A CN108720731B CN 108720731 B CN108720731 B CN 108720731B CN 201810336966 A CN201810336966 A CN 201810336966A CN 108720731 B CN108720731 B CN 108720731B
- Authority
- CN
- China
- Prior art keywords
- display
- vehicle
- user
- information
- displayed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 32
- 238000004140 cleaning Methods 0.000 claims abstract description 22
- 230000001815 facial effect Effects 0.000 claims description 6
- 238000001514 detection method Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4002—Installations of electric equipment
- A47L11/4008—Arrangements of switches, indicators or the like
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/65—Instruments specially adapted for specific vehicle types or users, e.g. for left- or right-hand drive
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0094—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots involving pointing a payload, e.g. camera, weapon, sensor, towards a fixed or moving target
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1686—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated camera
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/002—Specific input/output arrangements not covered by G06F3/01 - G06F3/16
- G06F3/005—Input arrangements through a video camera
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/015—Input arrangements based on nervous system activity detection, e.g. brain waves [EEG] detection, electromyograms [EMG] detection, electrodermal response detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/172—Classification, e.g. identification
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2200/00—Indexing scheme relating to G06F1/04 - G06F1/32
- G06F2200/16—Indexing scheme relating to G06F1/16 - G06F1/18
- G06F2200/161—Indexing scheme relating to constructional details of the monitor
- G06F2200/1614—Image rotation following screen orientation, e.g. switching from landscape to portrait mode
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Multimedia (AREA)
- Computer Hardware Design (AREA)
- Transportation (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Dermatology (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Biomedical Technology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
- Electric Vacuum Cleaner (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
本发明涉及一种用于运行在环境内自主行进的、无人驾驶的车辆(1)的方法,所述车辆(1)尤其是清洁机器人,其中,所述车辆(1)探测位于周围环境内的障碍物和/或人员,其中,在所述车辆(1)的显示器(4)上向用户(2)显示信息(3),所述显示器(4)参照显示平面在所述车辆(1)运行时通常水平地定向。为了允许车辆(1)的用户(2)无论其位置如何都始终能够最佳地读取信息(3),在此建议,当探测到存在用户(2)时,检测该用户(2)相对于所述车辆(1)的空间位置,并且根据测得的用户(2)的空间位置改变所显示的信息(3)的定向。
Description
技术领域
本发明涉及一种用于运行在环境内自主行进的、无人驾驶的车辆的方法,所述车辆尤其是清洁机器人,其中,所述车辆探测位于周围环境内的障碍物和/或人员,其中,在所述车辆的显示器上向用户显示信息,所述显示器参照显示平面在所述车辆运行时通常水平地定向。
本发明此外涉及一种在环境内自主行进的无人驾驶的车辆、尤其清洁机器人,所述车辆具有用于探测位于周围环境内的障碍物和/或人员的图像采集装置,其中,所述车辆具有用于显示信息的显示器,所述显示器参照显示平面在所述车辆运行时通常水平地定向。
现有技术
自主行进的车辆在现有技术中是已知的。设计为清洁机器人的车辆例如在文献DE10 2012 109 004 A1中示出。这里描述了一种具有人机界面的清洁机器人,其可以具有设计在清洁机器人的壳体上的显示器。在该显示器上可以显示关于清洁机器人的处理过程的信息,此外还有涉及清洁环境的信息。
此外,例如从文献DE 10 2008 014 912 A1和DE 10 2011 000 250 A1中已知,为自主行进的车辆、如清洁机器人配备探测装置,该探测装置能够探测清洁机器人的周围环境内的障碍物。当驶过环境内的局部区域、例如住宅房间时,探测装置测量相对于障碍物的距离,该距离作为创建环境地图的基础。根据所测量的相对于障碍物的距离,车辆可以通过适当的调度运动和偏转运动来响应,以免与障碍物相撞。
此外,在现有技术中已知用于清洁机器人的不同类型的探测装置,例如超声波传感器、接触传感器和摄像头系统等。
在现有技术中以固定的显示方向在车辆显示器上显示出与车辆操作、环境特征或用于车辆操作的选择可能性有关的信息。通常,显示方向是这样的,使得当用户相对于车辆的主行进方向位于车辆前方时,用户可以最佳地读取信息、特别是文本信息。
然而,当例如应当从车辆侧面或者从后方对车辆进行操作时,所描述的显示方向对于车辆的用户是不舒服的。
发明内容
因此,本发明所要解决的技术问题是,提供一种用于操作自主行进的车辆的方法或一种自主行进的车辆,其中,所述车辆的可操作性被优化,尤其即便在车辆的不同侧面进行操作时。
为了解决上述技术问题,首先建议,当探测到存在用户时,检测该用户相对于所述车辆的空间位置,并且根据测得的用户的空间位置改变所显示的信息的定向。
通过本发明,向用户显示的信息可以这样显示在车辆的显示器上,使得用户无需相对于车辆或显示器移动和/或转动就能总是舒适地从其当前位置和定向阅读。为此,车辆的探测装置或者相对于车辆布置在外部的探测装置对用户相对于车辆的位置进行探测。如果确定当前在显示器上显示的信息没有在允许用户(相对于显示平面)通常的自上而下读取信息的显示方向上提供,则如此改变显示方向,使得用户可以在不改变其位置或定向的情况下,通过注视车辆和/或显示器的相应注视方向从其当前空间位置上最优地读取信息。为了使显示方向改变或至少检查当前的显示方向是否合适,足够作为触发事件的是,人员停留在车辆附近。在此,用户不必一定要转向车辆或者甚至看向车辆。根据该实施方式,在显示器上的信息显示已经事先进行调整,尤其是存在的人员想要短暂地操作车辆或者希望从显示器读取信息的情况下。
在此建议,借助图像采集装置探测用户的存在。图像采集装置可以特别优选地是摄像头或至少摄像头芯片,然后分析其图像数据,是否人员处于采集区域内。用传统的图像处理方法根据定义的特征可以判定,对象是物体还是人形。如果断定人员存在于车辆的确定的环境区域内,则可以在另一方法步骤中确定显示器上的信息的显示方向是否适合于使用户能够从其相对于车辆的当前空间位置出发,最佳地且以常规方式方法阅读显示屏上显示的信息。如果不是这种情况,则如所建议的那样,根据所确定的用户的空间位置来调整所显示的信息的定向。
尤其建议,通过面部识别方法确定用户的注视方向。根据该设计方案,不仅确定用户相对于车辆的存在和位置,而且具体地确定用户当前注视哪个方向。尤其可以分析用户是否正在注视车辆。如果用户没有注视车辆方向,而是注视偏离车辆方向的空间方向,则可以规定,不调整车辆显示器上的显示方向。如果断定用户的注视方向指向车辆方向,尤其注视车辆的显示器和/或图像采集装置,则进行对显示信息的定向的调整。在此,面部识别方法还可以包括确定用户的个人情况,即,用户是否是登记在车辆上并且还被授权操作车辆的用户。如通过前述的纯粹地确定用户相对于车辆的空间位置,还可以在面部识别的范围内识别用户目前是否位于车辆或者其显示器的前方、旁边或后方。
此外建议,探测用户对所述车辆进行操作的操作方向。在该设计方案中确定用户从哪个方向操作例如车辆的输入界面、尤其是触摸屏。操作方向的探测需要用户例如用手接近车辆的输入界面和/或显示器,以便短暂地或在探测时刻执行车辆的操作。作为替代方案,操作方向可以通过图像采集装置来探测。同样,可以使用接触传感器或触敏显示器等。
尤其建议,探测用户在所述车辆上所使用的手的指向。根据用户的手的指向,可以推断出用户想要操作或操作车辆的操作方向,并且因此也可以推断出用户在环境中的当前空间位置和定向。例如,用户的图像采集装置拍摄用户正在操作车辆的手或至少接近车辆的手的图像。随后,通过图像处理对所采集的图像针对相对于车辆定向的手的指向进行评估。
尤其建议,借助电容式传感器、尤其电容式显示器探测手的指向。当用户的手朝着电容式传感器移动时,电容变化并且可以推断出手的存在。电容式传感器可以特别有利地集成到车辆的显示器中,即以电容式触摸屏的形式。由此可根据显示器测量的信号识别出用户当前正在从哪个操作方向操作车辆。传感器或显示器的那些电容增大的局部区域指出例如可假定为操作方向的方向。作为替代和/或补充,用户的手的操作方向或指向可借助图像采集装置、如摄像头来探测。
此外建议,根据测得的用户的空间位置,从所述显示器的多个可能的显示方向中选择一个。例如可以为在显示器上的显示定义几个优选方向。在矩形显示器的情况下,这可以例如是平行于侧边取向的显示方向,即四个彼此旋转90°的显示方向。如果为在显示器上的显示定义离散的显示方向,则建议在确定用户的注视方向或操作方向之后,检查哪个显示方向最接近当前注视方向或操作方向。如果显示器的预定的显示方向均不平行于用户的注视方向或操作方向,则优选地选择与注视方向或操作方向具有最小角度偏差的显示方向。然而此外还可以规定,显示方向可以被无级地选择,即,例如显示器不预先设定离散的显示方向。这是如下情形,即当显示器例如设计成圆形时,从而在每个可能方向上都可以显示信息,而无需从显示器的外轮廓切除例如信息区的角区域。为了当所展示的信息在显示器上转动时防止信息被显示器的轮廓切掉,还可以规定,显示器的用于定向的显示区域选择为大于显示信息所需的区域。在信息的显示尺寸恒定不变的情况下还可以由此实现显示内容在所有期望方向上定向。
此外建议,根据用户的空间位置,将在显示器上显示的信息的多个分区和/或在显示器上显示的操作元件的多个分区相对彼此重新组合。根据该实施方式,在显示器上例如展示至少一个操作元件,其中,操作元件的定向和/或位置根据所确定的用户相对于显示的信息的空间位置和/或其它操作元件而变化。操作元件尤其可以显示在显示器的显示区域面向用户的边缘上,特别优选地显示在显示区域面向用户的边缘与显示的信息之间。根据用户的空间位置,由此可将显示器上显示的信息和/或操作元件至少部分地重新组合,使得它们在显示区域上的位置改变,并且因此这时例如到目前为止沿用户的注视方向布置在另一个分区上的信息的局部区域布置在该分区旁边。这些操作元件例如按照触摸面的类型展示在显示器上,用户可按压在所述触摸面上,用于例如选择菜单。操作元件可以优选地布置在显示器的显示区域的边缘区域中,特别优选地根据用户的注视方向布置在作为文本展示的信息之前,使得用户在控制所述操作元件之一时不会用他的手遮挡其它的在显示器上显示的信息。信息因此可以优选地这样布置在显示器上,使得操作元件总是指向用户的方向并因此位于另外显示的信息(例如文本部分)和用户之间。此外可以规定,显示器在显示区域之外单独地配属有按照按钮类型的控制元件。展示在显示器上的操作元件在该情形下可以包括用于所配属的控制元件的解释和/或标签,使得用户获知关于控制元件具有哪些功能的信息。为了即使当信息在显示器上的定向变化时操作元件也例如总是保留在所配属的控制元件的旁边,操作元件可以始终布置在显示区域的与控制元件邻接的边缘处。
根据特别优选的实施方式,为了执行该方法而建议以时间上相继的方式实施以下方法步骤:
-借助图像采集装置拍摄车辆的周围环境,
-识别用户在车辆的周围环境中的存在,
-确定用户的注视方向和/或手的操作方向,
-将确定的注视方向和/或操作方向与显示器的显示方向相配属,和
-以所配属的显示方向的取向来显示信息。
可重复运行前述的方法步骤以使显示内容最佳地定向。首先,例如拍摄车辆的周围环境的摄像图像,然后执行面部识别以识别用户的面部并确定用户的注视方向,其中,随后配属在显示器上可能的显示方向,该显示方向最好地对应于确定的注视方向。在显示器上显示的信息随后相应地旋转到最佳显示方向上,以便用户可以从他的注视方向最佳地读取信息。
除了上述方法之外,本发明还建议一种在环境内自主行进的无人驾驶的车辆、尤其清洁机器人,其中,所述车辆具有用于探测位于周围环境内的障碍物和/或人员的图像采集装置,其中,所述车辆具有用于显示信息的显示器,所述显示器参照显示平面在所述车辆运行时通常水平地定向,并且其中,所述车辆具有计算装置,所述计算装置设置为,当探测到存在用户时,检测该用户相对于所述车辆的空间位置,并且根据测得的用户的空间位置改变在所述显示器上显示的信息的显示方向。
所述车辆、尤其是这样设计的清洁机器人因此适合于执行前述方法并且使在车辆的显示器上显示的信息这样定向,使得用户可从他当前的注视方向读取信息和/或可从他当前的操作方向最佳地操作。
为了尽可能最佳地将信息在显示器上显示和定向,尤其建议,所述显示器具有显示区域,所述显示区域的边长至少等于在所述显示器上显示的信息的最大可能的对角线,和/或所述显示器具有具备直径的圆形的显示区域,该直径至少等于在所述显示器上显示的信息的对角线。根据该实施方式,显示器的整个显示区域与为了显示信息所要求的显示器的局部区域之间的比率被如此确定大小,使得所显示的信息即使在显示器上旋转时也不突出超过显示区域的边缘,因此无论当前的显示方向如何都可以完全显示信息,特别是角区域不会被切掉。
附图说明
以下将参照实施例更详细地解释本发明。在附图中:
图1示出根据本发明的自主行进的车辆,
图2示出用户从第一方向对车辆的操作情形,
图3示出用户从第二方向对车辆的操作情形,
图4示出在一个或多个用户处于不同空间位置的情况下车辆的示意图,
图5示出根据第一实施方式的其上显示有信息的显示器的显示区域的原理图,
图6示出根据第二实施例的显示器的显示区域的原理图,
图7a、7b、7c示出具有以不同的显示方向显示的信息的显示器的第一实施方式,
图8a、8b、8c示出具有信息的显示器的第二实施方式,所述信息以不同显示方向显示。
具体实施方式
图1示出在环境内自主行进的车辆1,该车辆1在此设计为抽吸机器人。车辆1具有壳体11,在壳体11的上侧上设计具有显示区域7的显示器4。此外,车辆1具有用于在环境内行进的电机驱动的车轮12(参见图2至图4)以及用于执行清洁作业的一个或多个清洁元件10。车辆1还具有未详细示出的三角测量装置,其可在360°的角度范围内、即在车辆1周围,在探测平面内测量距离。三角测量装置例如具有用于发射光束的激光器。所述光束穿过车辆1的壳体11的开口被射出并且在360°角度范围内扫描车辆1的周围环境。当光束遇到障碍物时,至少一部分被反射并且被三角测量装置的传感器探测。根据三角测量装置与反射光束的障碍物之间的距离,反射的部分触及传感器的另一位置。基于该位置,可以确定障碍物到车辆1的距离。除了三角测量装置之外,车辆1还具有同样未示出的测距装置,该测距装置配属于车辆1的车轮12并且可以测量走过的行程和行驶方向。车辆1具有内部存储器和计算装置,通过该计算装置可由测量数据创建车辆1的周围环境的环境地图。基于该环境地图,车辆1可以在环境内定向并且规划例如用于适宜进行住宅中的地板清洁的行进路径。为了创建环境地图,将由测距装置获取的测量数据与三角测量装置的环境数据进行比较。然后,可将所创建的环境地图根据需要在车辆1的显示器4上显示给车辆1的用户。
另外,车辆1具有图像采集装置5,即摄像头,该图像采集装置5可转动地布置,使得图像采集装置5的探测范围能够在360°的角度范围内围绕车辆1周围转动。图像采集装置5与车辆1的计算装置通信连接,使得可以借助计算装置来分析拍摄的图像数据。
图2示出用户2对车辆1的操作过程。车辆1在此例如与基站13连接,以便对蓄电池充电。在图示的房间情形下,用户2相对于车辆1的常规的主行进方向位于车辆1的前方,即车辆1的清洁元件10向前进的地方。清洁元件10在此例如是电机驱动的清洁辊和侧刷。用户2想要从在显示器4上显示的信息3中做出选择。这些信息3可以例如是车辆1的马达风扇单元的不同的可调节的功率级。这些信息3被沿显示方向rA展示在显示器4的显示区域7上。该显示方向rA基本上对应于用户2对车辆1的当前注视方向r1。用户2的注视方向r1可以落在车辆1的不同的局部区域上,例如落在显示器4上、在车辆1的壳体11的一部分上或朝向图像采集装置5的方向。在所示的实施例中假设用户2注视图像采集装置5的方向,使得注视方向r1沿用户2的眼睛和图像采集装置5之间的直线延伸。同时,用户2沿着显示器4的方向引导他的手6,由此通过他的手6的位置和指向定义操作方向r4。操作方向r4在此对应于手6的食指的方向。从如图2所示,其中,信息3的显示方向rA基本平行于注视方向r1和/或操作方向r4定向,则用户2还可以从偏移的空间位置和方向来操作车辆1。该情形在图3中示出。
图3示出车辆1和用户2的布置方式,其中,用户相对于车辆1的主行进方向位于车辆1的后方。为了使用户2此时从该空间位置也能够最佳地从显示器4读取信息3,尤其是无需相对于车辆1移动,从图2所示的情形出发来执行以下方法步骤。
首先,用户2转向车辆1。此时他注视车辆1、例如注视居中布置在车辆1上的图像采集装置5并且朝显示器4的方向引导他的手6,他想要在显示器4上从显示的信息3中做出选择。注视方向r2和操作方向r5在此从用户2在车辆1后方的位置指向车辆1。在操作车辆1期间,图像采集装置5以预定时间间隔拍摄车辆1的周围环境的图像。图像采集装置5将所拍摄的图像数据传输到车辆1的计算装置,在计算装置处进行分析,特别是关于对车辆1的紧邻环境内的用户2的存在进行识别。在此例如通过面部识别方法进行图像处理,该面部识别方法一方面识别图像中示出的面部,另一方面可以将所述面部配属于车辆1的注册用户2。为此,将图像数据与相应存储的参考数据进行比较。面部识别方法进一步对这些数据进行分析,针对用户2是否当前正在注视车辆1还是注视从车辆1远离的另一个方向。这里,用户2以注视方向r2注视车辆1,其被理解为用户2的操作愿望。此外,设计为电容式触摸屏的显示器4还探测到用户2的手6接近显示器4,由此同样推断出用户2的操作愿望。根据显示器4的各个分区的电容值,车辆1的计算装置识别出操作方向r5,所述操作方向r5在此对应于用户2的手6的食指的指向。随后,注视方向r2和操作方向r5被矢量地比较并且被组合成一个矢量,该矢量相当于注视方向r 2和操作方向r 5的计算平均值。然后,经平均的方向被配属于显示器4的显示方向rB,显示在显示器4上的信息3沿所述显示方向rB相对于车辆1的壳体11定向。从图2所示的情形出发,信息3根据图3的情形被旋转180°,使得用户2不必相对于车辆1移动就能够以常规方式读取信息3。
图4示意性地示出了车辆1以及一个或多个用户2对车辆1的不同注视方向r1,r2,r3。第一注视方向r1在此对应于图2中所示的情形,其中用户2从前方注视车辆1。注视方向r2对应于在车辆1后方存在用户2。该注视方向r2基本上对应于图3中所示的情形。此外,示出用户2从一侧注视车辆1的注视方向r3。除了示出的注视方向r1,r2,r3之外,也可以有大量的其它注视方向r1,r2,r3。通过图像采集装置5的可旋转性或者通过配备有扩大采集角度的光学系统(例如广角光学系统或鱼眼光学系统)的图像采集装置5,可以探测用户2在车辆1周围的位置。与之相对地,显示器4具有四个预定的显示方向rA,rB,rC,沿所述显示方向可以显示信息3。这些显示方向rA,rB,rC平行于显示器4的侧边取向,从而可以最佳地利用显示器4的显示区域7。
图5和图6示出车辆1的显示器4的两个替代实施方式,其中信息3可以沿着可无级选择的任意显示方向rA,rB,rC显示。
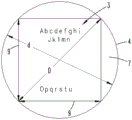
图5示出显示器4的实施方式,显示器4在此具有圆形的显示区域7。显示区域7被设计为在每个分区中显示信息3。显示区域7具有与其中显示信息3的局部区域的对角线D对应的直径d。包含信息3的局部区域被设计成正方形,其中当信息3在显示器4上旋转时,正方形的角部沿圆形显示器4的圆周线移动。不管显示器4上的信息3的当前方向如何,信息3总是完全展示在显示区域7上。
图6示出设计成正方形的具有显示区域7的显示器4,显示区域7可以在其整个纵向和横向延伸量上都用于显示信息3。在显示区域7上在中心处,同样正方形的区域被显示的信息3占据,所述信息3可以根据探测到的用户2的空间位置而围绕显示区域7的中心旋转。显示区域7具有边长8,其长度与显示器4由信息3占据的局部区域的对角线D相同。由信息3占据的局部区域具有最大边长9。由于信息3同样占据正方形区域,因此所有边长9都大小相等。当显示的信息3的取向改变时,正方形的角部在圆形轨道上(以虚线示出)移动。该圆形轨道被纳入显示区域7中,使得所显示的信息3的最外面的角区域总是位于显示区域7内并且因此当信息3的取向改变时,任何信息3都不被切掉。
图7和8示出显示器4的不同的实施方式,显示器4上显示的信息3具有不同的布局。
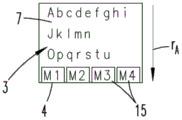
图7a,7b和7c分别示出显示器4,在显示器4上一方面以文本形式展示信息3,另一方面示出操作元件15。操作元件15按照触摸面的类型展示在显示器4上,用户2可按压在所述触摸面上,以便选择菜单。操作元件15在此布置在显示器4的显示区域7的边缘区域中,即根据显示方向rA,rB,rC在所展示的文本下方,使得用户2在控制操作元件15之一时不会用他的手6遮挡其它的显示在显示器4上的信息3。图7a、图7b和图7c示出信息3的不同显示方向rB、rC、rA,其对应于用户2相对于车辆1的不同位置。图7a中示出的信息3的显示方向r B对应于用户2在所示的图像平面中位于上部侧边处的情形。图7b对应于用户2位于显示器4右边的情形,并且图7c最后示出用户2从下部侧边的方向观察车辆1的情形。在所示的所有情形下,信息3都这样安排在显示器4上,使得操作元件15总是指向用户的方向并因此总是位于其它所显示的信息3(这里是文本部分)和用户2之间。
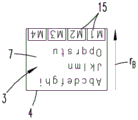
图8a、8b和8c示出显示器4的另一实施方式,所述显示器4在显示区域7之外单独地配属有按照按钮类型的控制元件14。展示在显示器4上的操作元件15在该情形下形成用于所配属的控制元件14的解释和/或标签,使得用户2获知关于控制元件14具有哪些功能的信息。为使操作元件15即使当信息3在显示器4上的取向变化时也总是保留在所配属的控制元件14的旁边,操作元件15总是在所展示的图像平面中被布置在显示器4的上部边缘处。然而,在操作元件15上示出的标签的定向发生变化,使得所述定向对应于其它信息3的定向,即相应的显示方向rB(图8a)、rC(图8b)和rA(图8c)。
附图标记清单
1 车辆
2 用户
3 信息
4 显示器
5 图像采集装置
6 手
7 显示区域
8 边长
9 边长
10 清洁元件
11 壳体
12 轮
13 基站
14 控制元件
15 操作元件
rA 显示方向
rB 显示方向
rC 显示方向
r1 注视方向
r2 注视方向
r3 注视方向
r4 操作方向
r5 操作方向
d 直径
D 对角线
Claims (14)
1.一种用于运行在环境内自主行进的、无人驾驶的车辆(1)的方法,其中,所述车辆(1)探测位于周围环境内的障碍物和/或人员,其中,在所述车辆(1)的显示器(4)上向用户(2)显示信息(3),所述显示器(4)参照显示平面在所述车辆(1)运行时水平地定向,其特征在于,当探测到存在用户(2)时,检测该用户(2)相对于所述车辆(1)的空间位置,并且根据测得的用户(2)的空间位置改变所显示的信息(3)的定向,其中信息(3)能够基于相对于显示器(4)的先前取向旋转+/- 180°,以便用户(2)能够在无需相对于车辆(1)移动的情况下读取信息(3),其中在显示器(4)上显示的操作元件(15)根据用户(2)的空间位置相对于彼此重新组合,其中通过面部识别方法确定用户的注视方向,并且检测该用户操作车辆的操作方向,其中将注视方向和操作方向矢量地比较并且组合成一个矢量,该矢量相当于注视方向和操作方向的计算平均值,并且其中经平均的方向被配属于显示器的显示方向,显示在显示器上的信息沿所述显示方向相对于车辆的壳体定向。
2.根据权利要求1所述的方法,其特征在于,借助图像采集装置(5)探测用户(2)的存在。
3.根据权利要求1或2所述的方法,其特征在于,通过面部识别方法确定用户(2)的注视方向(r1,r2,r3)。
4.根据权利要求1所述的方法,其特征在于,探测用户(2)对所述车辆(1)进行操作的操作方向(r4,r5)。
5.根据权利要求4所述的方法,其特征在于,探测用户(2)在所述车辆(1)上所使用的手(6)的取向。
6.根据权利要求5所述的方法,其特征在于,借助电容式传感器和/或借助图像采集装置(5)探测手(6)的取向。
7.根据权利要求1所述的方法,其特征在于,根据测得的用户(2)的空间位置,从所述显示器(4)的多个可行的显示方向(rA,rB,rC)中选择一个。
8.根据权利要求1所述的方法,其特征在于,将在显示器(4)上显示的信息(3)的多个分区根据用户(2)的空间位置相对彼此重新组合。
9.根据权利要求1所述的方法,其特征在于以下相继的方法步骤:
- 借助图像采集装置(5)拍摄车辆(1)的周围环境,
- 识别用户(2)在车辆(1)的周围环境中的存在,
- 确定用户(2)的注视方向(r1)和/或手(6)的操作方向(r2),
- 将确定的注视方向(r1)和/或操作方向(r2)与显示器(4)的显示方向(rA,rB,rC)相配属,
- 以所配属的显示方向(rA,rB,rC)的取向来显示信息。
10.根据权利要求1所述的方法,其特征在于,所述车辆(1)是清洁机器人。
11.根据权利要求6所述的方法,其特征在于,所述电容式传感器是电容式显示器(4)。
12.一种在环境内自主行进的无人驾驶的车辆(1),所述车辆(1)具有用于探测位于周围环境内的障碍物和/或人员的图像采集装置(5),其中,所述车辆(1)具有用于显示信息(3)的显示器(4),所述显示器(4)参照显示平面在所述车辆(1)运行时通常水平地定向,以及所述车辆(1)具有计算装置,所述计算装置设置为,当探测到存在用户(2)时,检测该用户(2)相对于所述车辆(1)的空间位置,并且根据测得的用户(2)的空间位置改变在所述显示器(4)上显示的信息的显示方向(rA,rB,rC),其中信息(3)能够基于相对于显示器(4)的先前取向旋转+/- 180°,以便用户(2)能够在无需相对于车辆(1)移动的情况下读取信息(3),其中在显示器(4)上显示的操作元件(15)根据用户(2)的空间位置相对于彼此重新组合,其中通过面部识别方法确定用户的注视方向,并且检测该用户操作车辆的操作方向,其中将注视方向和操作方向矢量地比较并且组合成一个矢量,该矢量相当于注视方向和操作方向的计算平均值,并且其中经平均的方向被配属于显示器的显示方向,显示在显示器上的信息沿所述显示方向相对于车辆的壳体定向。
13.根据权利要求12所述的车辆,其特征在于,所述显示器(4)具有显示区域(7),所述显示区域的边长(8)至少等于在所述显示器(4)上显示的信息(3)的最大可行的对角线(D),和/或所述显示器(4)具有具备直径(d)的圆形的显示区域(7),该直径(d)至少等于在所述显示器(4)上显示的信息(3)的对角线(D)。
14.根据权利要求12或13所述的车辆,其特征在于,所述车辆(1)是清洁机器人。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017108194.1A DE102017108194A1 (de) | 2017-04-18 | 2017-04-18 | Verfahren zum Betrieb eines sich selbsttätig fortbewegenden Fahrzeugs |
| DE102017108194.1 | 2017-04-18 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108720731A CN108720731A (zh) | 2018-11-02 |
| CN108720731B true CN108720731B (zh) | 2022-01-25 |
Family
ID=61952532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810336966.0A Active CN108720731B (zh) | 2017-04-18 | 2018-04-16 | 用于运行自主行进的车辆的方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10895880B2 (zh) |
| EP (1) | EP3392738B1 (zh) |
| JP (1) | JP2018181338A (zh) |
| CN (1) | CN108720731B (zh) |
| DE (1) | DE102017108194A1 (zh) |
| ES (1) | ES2894289T3 (zh) |
| TW (1) | TW201841586A (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017108194A1 (de) * | 2017-04-18 | 2018-10-18 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines sich selbsttätig fortbewegenden Fahrzeugs |
| US11903539B2 (en) | 2018-10-19 | 2024-02-20 | Bissell Inc. | Surface cleaning apparatus with proximity-triggered user interface |
| USD938115S1 (en) * | 2018-11-30 | 2021-12-07 | Irobot Corporation | Autonomous floor cleaning robot |
| CN112596602A (zh) * | 2019-09-17 | 2021-04-02 | 奥迪股份公司 | 用于调整显示屏上的信息显示的装置及相应的方法和介质 |
| DE102020128096A1 (de) | 2020-10-26 | 2022-04-28 | Vorwerk & Co. Interholding Gesellschaft mit beschränkter Haftung | Mobiles Haushaltsgerät mit einem Display |
| CN114557649B (zh) * | 2022-01-28 | 2023-04-14 | 北京顺造科技有限公司 | 清洁设备及清洁设备用户界面显示方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001072199A1 (en) * | 2000-03-28 | 2001-10-04 | It-Clean I Åstorp Ab | Method and device for cleaning |
| CN1575730A (zh) * | 2003-07-29 | 2005-02-09 | 乐金电子(天津)电器有限公司 | 真空吸尘器的安全装置 |
| EP2502540A2 (en) * | 2009-11-16 | 2012-09-26 | LG Electronics Inc. | Robot cleaner and method for controlling same |
| CN103845003A (zh) * | 2012-12-05 | 2014-06-11 | Lg电子株式会社 | 机器人清洁器 |
| CN104737085A (zh) * | 2012-09-24 | 2015-06-24 | 罗巴特公司 | 用于自主地检测或处理地面的机器人和方法 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6243076B1 (en) * | 1998-09-01 | 2001-06-05 | Synthetic Environments, Inc. | System and method for controlling host system interface with point-of-interest data |
| US7306337B2 (en) * | 2003-03-06 | 2007-12-11 | Rensselaer Polytechnic Institute | Calibration-free gaze tracking under natural head movement |
| JP2005100084A (ja) * | 2003-09-25 | 2005-04-14 | Toshiba Corp | 画像処理装置及び方法 |
| WO2005119591A1 (ja) * | 2004-06-04 | 2005-12-15 | Matsushita Electric Industrial Co., Ltd. | 表示制御方法および装置、プログラム、並びに携帯機器 |
| JP4528295B2 (ja) * | 2006-12-18 | 2010-08-18 | 株式会社日立製作所 | 案内ロボット装置及び案内システム |
| US8152071B2 (en) * | 2008-02-08 | 2012-04-10 | Motion Computing, Inc. | Multi-purpose portable computer with integrated devices |
| DE102008014912B4 (de) | 2008-03-19 | 2023-01-19 | Vorwerk & Co. Interholding Gmbh | Selbsttätig verfahrbares Bodenstaub-Aufsammelgerät |
| EP2322071A4 (en) * | 2008-08-08 | 2012-01-18 | Panasonic Corp | CONTROL DEVICE AND CONTROL METHOD FOR CLEANING APPARATUS, CLEANING APPARATUS, CONTROL PROGRAM FOR CLEANING APPARATUS, AND INTEGRATED ELECTRONIC CIRCUIT |
| JP2010117260A (ja) * | 2008-11-13 | 2010-05-27 | Epson Toyocom Corp | 姿勢検出装置の補正パラメーター作成方法、姿勢検出装置の補正パラメーター作成用装置及び姿勢検出装置 |
| KR101641237B1 (ko) * | 2009-11-20 | 2016-07-21 | 엘지전자 주식회사 | 로봇 청소기 및 이의 제어 방법 |
| JP2011192030A (ja) * | 2010-03-15 | 2011-09-29 | Nippon Telegr & Teleph Corp <Ntt> | 情報表示装置 |
| JP2011240468A (ja) * | 2010-05-21 | 2011-12-01 | Toyota Motor Corp | ロボットの接触種類判別システム |
| US8757490B2 (en) * | 2010-06-11 | 2014-06-24 | Josef Bigun | Method and apparatus for encoding and reading optical machine-readable data codes |
| DE102011000250A1 (de) | 2011-01-21 | 2012-07-26 | Vorwerk & Co. Interholding Gmbh | Verfahren zur Bestimmung der Position eines selbsttätig verfahrbaren Geräts |
| US8885882B1 (en) * | 2011-07-14 | 2014-11-11 | The Research Foundation For The State University Of New York | Real time eye tracking for human computer interaction |
| US20130038437A1 (en) * | 2011-08-08 | 2013-02-14 | Panasonic Corporation | System for task and notification handling in a connected car |
| US8726457B2 (en) * | 2011-12-30 | 2014-05-20 | Techtronic Floor Care Technology Limited | Vacuum cleaner with display |
| US9123142B2 (en) * | 2012-10-02 | 2015-09-01 | At&T Intellectual Property I, L.P. | Adjusting content display orientation on a screen based on user orientation |
| US9398287B2 (en) * | 2013-02-28 | 2016-07-19 | Google Technology Holdings LLC | Context-based depth sensor control |
| US9766709B2 (en) * | 2013-03-15 | 2017-09-19 | Leap Motion, Inc. | Dynamic user interactions for display control |
| US10146299B2 (en) * | 2013-11-08 | 2018-12-04 | Qualcomm Technologies, Inc. | Face tracking for additional modalities in spatial interaction |
| US9659403B1 (en) * | 2014-01-06 | 2017-05-23 | Leap Motion, Inc. | Initializing orientation in space for predictive information for free space gesture control and communication |
| WO2015126182A1 (ko) * | 2014-02-21 | 2015-08-27 | 삼성전자 주식회사 | 콘텐츠를 표시하는 방법 및 이를 위한 전자 장치 |
| KR102072387B1 (ko) * | 2014-03-20 | 2020-02-03 | 삼성전자주식회사 | 로봇 청소기 및 로봇 청소기의 제어방법 |
| WO2015188011A1 (en) * | 2014-06-04 | 2015-12-10 | Quantum Interface, Llc. | Dynamic environment for object and attribute display and interaction |
| JP6826804B2 (ja) * | 2014-08-29 | 2021-02-10 | 東芝ライフスタイル株式会社 | 自律走行体 |
| US10317992B2 (en) * | 2014-09-25 | 2019-06-11 | Microsoft Technology Licensing, Llc | Eye gaze for spoken language understanding in multi-modal conversational interactions |
| JP2016087106A (ja) * | 2014-11-05 | 2016-05-23 | シャープ株式会社 | 掃除支援装置及び掃除機 |
| US10817172B2 (en) * | 2015-03-27 | 2020-10-27 | Intel Corporation | Technologies for graphical user interface manipulations using multi-finger touch interactions |
| WO2016174784A1 (ja) * | 2015-04-28 | 2016-11-03 | シャープ株式会社 | 制御装置および表示装置 |
| KR102427836B1 (ko) * | 2015-06-26 | 2022-08-02 | 삼성전자주식회사 | 로봇 청소기, 정보 제공 시스템 및 정보 제공 방법 |
| DE102017108194A1 (de) * | 2017-04-18 | 2018-10-18 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines sich selbsttätig fortbewegenden Fahrzeugs |
| WO2019182378A1 (en) * | 2018-03-21 | 2019-09-26 | Lg Electronics Inc. | Artificial intelligence server |
-
2017
- 2017-04-18 DE DE102017108194.1A patent/DE102017108194A1/de not_active Withdrawn
-
2018
- 2018-03-29 EP EP18164993.0A patent/EP3392738B1/de active Active
- 2018-03-29 ES ES18164993T patent/ES2894289T3/es active Active
- 2018-04-10 JP JP2018075191A patent/JP2018181338A/ja active Pending
- 2018-04-16 CN CN201810336966.0A patent/CN108720731B/zh active Active
- 2018-04-17 TW TW107113059A patent/TW201841586A/zh unknown
- 2018-04-17 US US15/954,986 patent/US10895880B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001072199A1 (en) * | 2000-03-28 | 2001-10-04 | It-Clean I Åstorp Ab | Method and device for cleaning |
| CN1575730A (zh) * | 2003-07-29 | 2005-02-09 | 乐金电子(天津)电器有限公司 | 真空吸尘器的安全装置 |
| EP2502540A2 (en) * | 2009-11-16 | 2012-09-26 | LG Electronics Inc. | Robot cleaner and method for controlling same |
| CN104737085A (zh) * | 2012-09-24 | 2015-06-24 | 罗巴特公司 | 用于自主地检测或处理地面的机器人和方法 |
| CN103845003A (zh) * | 2012-12-05 | 2014-06-11 | Lg电子株式会社 | 机器人清洁器 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201841586A (zh) | 2018-12-01 |
| US10895880B2 (en) | 2021-01-19 |
| CN108720731A (zh) | 2018-11-02 |
| JP2018181338A (ja) | 2018-11-15 |
| US20180299902A1 (en) | 2018-10-18 |
| EP3392738B1 (de) | 2021-08-18 |
| EP3392738A1 (de) | 2018-10-24 |
| ES2894289T3 (es) | 2022-02-14 |
| DE102017108194A1 (de) | 2018-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108720731B (zh) | 用于运行自主行进的车辆的方法 | |
| US10265858B2 (en) | Auto-cleaning system, cleaning robot and method of controlling the cleaning robot | |
| US11468983B2 (en) | Time-dependent navigation of telepresence robots | |
| US11289192B2 (en) | Interfacing with a mobile telepresence robot | |
| US10542859B2 (en) | Cleaning robot and controlling method thereof | |
| US11886186B2 (en) | Mobile robot and control method of mobile robot | |
| US10967512B2 (en) | Moving robot and controlling method | |
| US10423163B2 (en) | Mobile robot and method of controlling same | |
| EP3585571B1 (en) | Moving robot and control method thereof | |
| US10291765B2 (en) | Mobile device, robot cleaner, and method for controlling the same | |
| US9950429B2 (en) | Robot cleaning system and method of controlling robot cleaner | |
| WO2019144541A1 (zh) | 一种清洁机器人 | |
| JP5803043B2 (ja) | 移動式ロボットシステム及び移動式ロボットを作動させる方法 | |
| US20050212680A1 (en) | Self-propelled cleaner | |
| CN111493751A (zh) | 清洁机器人及其控制方法 | |
| JP2015092348A (ja) | 可動式ヒューマンインターフェースロボット | |
| KR20180074141A (ko) | 이동 로봇 | |
| KR102314537B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR20210015126A (ko) | 이동 로봇 | |
| CN114905503A (zh) | 机器人控制系统、机器人控制方法和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |