CN108289593B - 杆器械 - Google Patents
杆器械 Download PDFInfo
- Publication number
- CN108289593B CN108289593B CN201680051213.4A CN201680051213A CN108289593B CN 108289593 B CN108289593 B CN 108289593B CN 201680051213 A CN201680051213 A CN 201680051213A CN 108289593 B CN108289593 B CN 108289593B
- Authority
- CN
- China
- Prior art keywords
- housing
- hollow
- hollow rod
- rod
- image sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00096—Optical elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00183—Optical arrangements characterised by the viewing angles for variable viewing angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0661—Endoscope light sources
- A61B1/0684—Endoscope light sources using light emitting diodes [LED]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
Abstract
本发明涉及一种杆器械,尤其是医用内窥镜杆器械,具有空心杆(2)和至少一个在远侧集成在空心杆中的壳体(8),该壳体具有至少一个设置在其中的用于光学检测空心杆(2)的远侧区域的电子图像传感器(14)和/或用于照亮该区域的发光机构,壳体(8)可以从图像传感器(14)和发光机构设置在空心杆(2)的内腔(22)之内的位置中直线地运动到图像传感器(14)和发光机构设置在空心杆(2)的内腔(22)之外的位置中,其中壳体(8)可移动地穿过构成在空心杆(2)的环周壁上的开口(20),并在与开口(20)相反地背离的内置的外侧(26)上支承在至少一个在空心杆(2)中引导的长形的且横向于其纵向延伸可弹性回弹地构成的承载件上,该承载件基本上在空心杆的整个长度上延伸并固定在空心杆的近侧端部的区域中或者固定在空心杆的近侧上。
Description
技术领域
本发明涉及一种杆器械并且尤其是医用内窥镜的杆器械。
背景技术
在微创手术领域中使用标准化的刚性的、半柔性的或柔性的杆器械,这些杆器械通过天然的或人工实现的输送通道被引入待治疗的患者体内并在那里用于检查腔室或空腔器官。这种类型的器械还可作为所谓的工业用内窥镜应用于下述技术领域,在这些技术领域中所述工业用内窥镜使用在难以接近的技术对象的腔室中。
为了对空腔或中空器官进行光学评估,这种杆器械具有观察装置和用于照亮观察区域的照明装置。作为观察装置,使用从杆的远侧端部穿过所述杆延伸并在杆的近侧与目镜连接的透镜系统,或者使用摄像机的设置在所述杆的远侧端部上的电子图像传感器,在此图像传感器与设置在杆的近侧上的图像处理装置和设置在该装置下游的监视装置连接。照明装置包括至少一个被引导穿过所述杆且在杆的近侧与光源连接的光导体,或者具有至少一个设置在杆的远侧端部上的发射光的半导体元件,该半导体元件连接在设置于杆的近侧上的电压源上。
这种杆器械形成本发明的出发点,除了光学观察以外,杆器械还能够在观察区域中实施手术干预。在这种杆器械中,将辅助器械,例如钳子或切割器械穿过构成为空心杆的杆引导至手术区域。在此,在杆中在杆的远侧端部上位于观察和照明装置的部件侧旁设置的可用自由空间决定性地确定可使用的辅助器械的类型,因为所使用的辅助器械的尺寸必须与杆中的现有自由空间相一致。这尤其意味着,不能使用径向尺寸在其被引导穿过杆的区域中超出特定大小的辅助器械。尽管存在通过提供具有较大直径的空心杆来克服该限制的可能性,但是这种措施会导致在医用内窥镜中使用的杆器械可能造成使身体组织的创伤明显增加,并通常会使杆器械的应用范围减小,因为由于其杆直径的尺寸而使其无法用于仅可经由非常窄的入口才能到达的体腔或空腔器官。
EP 2123225 A1虽然属于现有技术,其中,设置在远侧杆端部的区域中的照相机壳体从杆的内腔中移出,但是仅出于光学原因,以获得更有利于干预的观察位置。在此工作通道不受影响,移出机制是高成本、需要空间的和易于损坏的。
US 5,166,787 A属于现有技术,其中照相机壳体可向外枢转地设置在远侧杆端部上。这种布置虽然可提供工作通道中的自由空间,但是就操作机制和电缆引导而言则有待商榷。
发明内容
在该背景下,本发明所基于的目的是,提出一种杆器械并且尤其是提出一种医用内窥镜杆器械,所述杆器械不存在上述缺点。
本发明的目的通过根据本发明的杆器械来实现。
根据本发明的杆器械优选是医用内窥镜杆器械,但是其也可以涉及在该技术领域中使用的工业用内窥镜。杆器械构造有空心杆,通过该空心杆可以在需要时将辅助器械和/或流体引导至空心杆的远侧。空心杆可以刚性地构成,也可以至少分部段地沿横向于其纵向延展的方向可柔性弯曲地构成。
此外,杆器械具有至少一个电子图像传感器和发光机构,其中,该至少一个图像传感器用于,光学地检测位于空心杆远侧的区域,而发光机构设置用于,照亮由图像传感器检测的该区域。所有已知的电子图像传感器均可以用做图像传感器,其中,构成为半导体芯片的图像传感器,例如CMOS传感器或CCD传感器由于其小的结构尺寸是优选的。作为发光机构优选发射光的半导体元件,如发光或激光二极管,这些半导体元件的突出之处同样在于其小的结构尺寸。
在根据本发明的杆器械中,至少一个图像传感器和/或发光机构设置在在远侧集成在空心杆中的壳体中,在此术语“壳体”根据本发明理解为所有在外侧包围图像传感器或发光机构的外壳,即也可以理解为简单的覆层。从壳体起,设置于其中的图像传感器与优选设置在空心杆的近侧的图像处理装置信号连接,所述图像处理装置又与监视装置信号连接。设置用于照明的发光机构经由被引导穿过空心杆的电流导体与同样设置在空心杆近侧的电压源线路连接。优选的是,在一个共同的壳体中设置图像传感器和至少一个作为发光机构的发射光的半导体元件。
根据本发明的杆器械的特征在于,具有设置在其中的图像传感器和/或设置在其中的发光机构的壳体可以从图像传感器和/或发光机构位于空心杆内腔之内、即设置在其外部空间轮廓内的位置,直线地运动到图像传感器和/或发光机构设置在空心杆的内腔之外的位置中。
在本发明的意义上,内腔理解为由所述杆包围的空间,即通过其内部轮廓确定的空间。
因此,杆器械可以具有第一工作状态,在所述第一工作状态中壳体完全设置在空心杆的外部轮廓内,并且从该处通过壳体的线性移动可以转入第二工作状态中,在所述第二工作状态中,壳体的大部分侧向地位于空心杆之外。在其第一工作状态中,杆器械的空心杆可以经由通向其特定位置的相对狭窄的输送通道被引导到空腔器官或腔室中,在此可以借助于图像传感器和/或发光机构观察和/或照亮空心杆的远侧区域,图像传感器和/或发光机构于是设置在空心杆的内腔之内。随后,壳体可以以直线运动优选沿空心杆的径向方向但是必要时也可以倾斜于空心杆的纵向延伸最大程度地从空心杆的内腔中向外运动,这样,在此也可确保对空心杆的外侧区域的观察和/或照明,并且尤其是可以有利地显著增大用于引导辅助器械或者用于引导流体穿过空心杆的自由空间。由此增加了可与杆器械相结合使用的辅助器械的品种或者还开启了下述可行性:在不限制迄今可使用的辅助器械的品种的情况下减小杆器械的空心杆的径向尺寸。就此而言,壳体的可直线运动是有利的,因为所述壳体在结构上和制造技术上可以简单实现并使图像传感器和/或发光机构在杆器械的第一和第二工作状态中始终相同,即不发生关于空心杆的中轴线的角度变化。
为了使壳体从集成在空心杆中的位置中运动到壳体最大程度地位于空心杆的径向外侧的位置中,在空心杆的环周壁上构成开口,壳体可移动穿过所述开口。在这种情况下所述开口的方位和尺寸有针对性地与壳体的方位和尺寸以及必要时与壳体的运动路径相一致,在此在壳体和开口之间仅存在一个小的间隙,从而使壳体和空心杆可以形成尽可能紧密的单元。
在此,根据本发明,所述壳体在其与构成在空心杆的环周壁上的开口相反地背离的外侧上支撑在至少一个在空心杆中引导的长形承载件上,所述承载件基本上在空心杆的整个长度上延伸并且固定在空心杆的近侧端部或空心管的近侧上。为了在空心杆的内腔中能够提供用于将辅助器械引导通过所述空心杆的尽可能大的自由空间,可以在空心管的近侧端部的区域中有针对性地以距空心杆的中轴线尽可能大的径向间距固定承载件。
在此,承载件弹性回弹地构成,使承载件在相应的外力的影响下可沿横向于其纵向伸展的方向弯曲并且在去除所述力之后再次具有其初始形状。承载件的这种弹性回弹的特性是特别适宜的,因为承载件与壳体固定连接并且以这种方式可以在不损坏的情况下跟随壳体从空心杆的内腔的内部向内腔的外部运动,并且反之亦然。
与此相关也证实为有利的是,如根据本发明的一个优选的改进方案提出的,壳体的外置的外侧在壳体在空心杆的内腔内部的位置中与空心杆的环周壁的外侧齐平。因此,优选将设置在空心杆的内腔内部的方位和壳体的外置的外侧的轮廓选择为,使设置在空心杆的内腔内部的壳体与空心杆形成共同的封闭的表面。
根据本发明的一个有利的改进方案提出,在壳体的与构成在空心杆的环周壁上的开口背离指向的内置的外侧上构成沿空心杆的纵向方向伸展的凹部,承载件接合到所述凹部中。该措施的目的在于,使所述承载件在从空心杆的内腔中向外移出的壳体中对在空心杆中因此而提供的用于穿引辅助器械的增大的自由空间产生尽可能少的影响或者完全不产生影响。为此,适宜地将所述凹部的尺寸确定为,使承载件在空心杆的横截面中不从壳体中伸出。
优选地,承载件由扁平管构成。尤其是就承载件横向于其纵向延伸的弹性可弯曲性而言,扁平管有意义地定向为,使壳体支承在扁平管的扁平侧上。在这种情况下扁平管的扁平侧垂直于壳体的运动方向地定向。虽然,用作为承载件的扁平管的横截面的形状通常可以是任意的,只要其沿特定的横截面方向具有比与此正交定向的横截面方向更大的尺寸,但有利的是,扁平管具有肾形 横截面。在此,用于图像传感器和/或发光机构的壳体优选支承在扁平管的凸形拱曲的扁平侧上,其拱曲部与空心杆的内部横截面轮廓相一致,从而使扁平管至少在其远侧的端部部段上在从空心杆的内腔中向外运动的壳体中齐平地贴靠在空心杆的内环周上,并且以这种方式以很小的量度对在空心杆内部需要用于穿引辅助器械的自由空间产生影响。在此,肾形的扁平管的凹形拱曲的扁平侧与构成在空心杆的环周壁上的开口相反地相背离,这对于在空心杆内部同样就用于引导辅助器械穿过空心杆的尽可能大的自由空间产生正面的影响,因为辅助器械在通常情况下带有具有圆形横截面的杆。
横截面。在此,用于图像传感器和/或发光机构的壳体优选支承在扁平管的凸形拱曲的扁平侧上,其拱曲部与空心杆的内部横截面轮廓相一致,从而使扁平管至少在其远侧的端部部段上在从空心杆的内腔中向外运动的壳体中齐平地贴靠在空心杆的内环周上,并且以这种方式以很小的量度对在空心杆内部需要用于穿引辅助器械的自由空间产生影响。在此,肾形的扁平管的凹形拱曲的扁平侧与构成在空心杆的环周壁上的开口相反地相背离,这对于在空心杆内部同样就用于引导辅助器械穿过空心杆的尽可能大的自由空间产生正面的影响,因为辅助器械在通常情况下带有具有圆形横截面的杆。
更有利的是,连接在图像传感器和/或发光二极管上的连接线路穿过扁平管朝向空心杆的近侧被引导。适宜地是,在此扁平管在其远侧端部上封闭地构成,使得电连接线路完全与可能引导穿过空心杆的自由内腔的流体相屏蔽。在多个连接线路引导穿过扁平管的情况下,使这些连接线路以最大可能的彼此间的间距、即在扁平管的最大横截面宽度的方向上相互间隔开地引导是有意义的。此外,可以在扁平管中在其远侧端部上有利地设置附加的发光机构,所述发光机构对由图像传感器检测的区域进行特别亮的照明。
为了对用于图像传感器和/或发光机构的壳体进行运动控制,即为了对壳体从图像传感器和/或发光机构设置在空心杆的内腔之内的位置到图像传感器和/或发光机构设置在空心杆的内腔之外的位置的直线运动进行控制,有利地通过滑杆控制(Kulissensteuerung)使壳体与在空心杆中可沿空心杆的纵向方向移动的推拉元件(Schub-Zug-Element)运动耦联。在此,空心杆的近侧与操纵装置有效连接的推拉元件沿空心杆的纵向方向的运动经由滑杆控制转换成壳体横向于空心杆的纵向方向的运动。
为了形成滑杆控制,优选推拉元件具有至少一个横向于其运动方向定向的凸起,所述凸起接合到构成在壳体的外侧上并沿径向方向倾斜伸展的导向槽中。如果推拉元件沿空心杆的纵向方向运动,推拉元件的在其外侧上倾斜伸展的导向槽和接合到所述导向槽中的凸起使壳体沿横向于空心杆的纵向延伸的或横向于推拉元件的运动方向的径向方向强制运动。
原则上,可以使用任意长形的、适合于沿其纵向方向进行力传递的组件作为推拉元件。但是,尤其是就提供用于将辅助器械穿引通过空心杆的尽可能大的自由空间而言被证实为有利的是,由管形成推拉元件,该管有利地尽可能薄壁地构成并且具有与空心杆的内径相一致的外径。在该情况下,辅助器械通过设置在空心杆中的管被引导穿过空心杆。在构成推拉元件的管上适宜地构成纵向狭缝,用于使图像传感器和/或发光机构的壳体接合到所述纵向狭缝中。此外,在纵向狭缝的两个纵向侧上分别构成有凸起。构成在纵向狭缝的两个纵向侧上的凸起接合到两个导向槽中,这两个导向槽构成在壳体的彼此相反背离的外侧上。
附图说明
下面借助附图中示出的实施例详细阐述本发明。在附图中示意性地简化地并且以不同的比例尺示出:
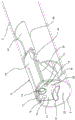
图1以立体图示出在第一工作状态中的医用内窥镜杆器械的远侧端部部段;
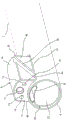
图2示出根据图1的视图在第二工作状态中的杆器械;
图3以放大的视图示出在第一工作状态中的根据图1的杆器械的杆的远侧端部区域;
图4以放大的视图示出在第二工作状态中的根据图1的杆器械的杆的远侧端部区域;
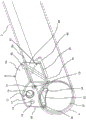
图5以前视图示出在第一工作状态中的根据图1的杆器械的远侧端部部段;
图6以前视图示出在第二工作状态中的根据图1的杆器械的远侧端部部段;和
图7以放大的视图示出在第二工作状态中的根据第二设计方案的杆器械的杆的远侧端部区域。
具体实施方式
在附图中示出的杆器械分别具有由刚性的管形成的空心杆2,在该空心杆2的近侧上连接有壳体部件4。在空心杆2的远侧端部6的区域中,在空心杆2中集成有壳体8。在远侧的壳体8的端侧10上构成有凹部12,在所述凹部12中设有图像传感器14。在凹部12的侧面在壳体8的端侧10上构成有两个另外的凹部16,在所述凹部16中分别设有作为发光机构的发光二极管18。在壳体8中,图像传感器14和发光二极管18可交换地设置,使得可以在需要时将图像传感器14和发光二极管18从壳体18中拆除并通过另一图像传感器14或另一发光二极管18来代替。
通过构成在空心杆2的环周壁上的开口20,可使壳体从图像传感器24和发光二极管8设置在空心杆2的内腔22之内的位置中(图1、3和5)移动到图像传感器14和发光二极管18设置在空心杆2的内腔22之外的位置中(图2、4、6和7)。在图像传感器14和发光二极管18设置在空心杆2的内腔22之内的位置中,壳体8的具有与空心杆2的外倒圆部互补的拱曲部的外置的外侧24与空心杆2的外侧齐平。
如尤其是从图5和图6中可清楚看到的,在壳体8的与壳体8的开口20或外侧24背离的内置的外侧26上构成有凹部28。该凹部28沿空心杆2的纵向方向从远侧的端侧10延伸至壳体8的近侧的端侧30并用于容纳具有肾形横截面的扁平管32,所述扁平管32从空心杆2的远侧端部延伸至空心杆2的近侧,并且空心杆2的近侧不可移动地固定在壳体部件40上。扁平管32构成承载件,壳体8在其位于空心杆2的内腔22之内的位置中和在其从内腔22向外运动的位置中都支承在该承载件上。为了能够跟随壳体8的运动,扁平管32在横向于其纵向延展的方向上具有一定的弹性,使得所述扁平管能够弹性地横向于其纵向延展弯曲。
除了作为用于壳体8的承载件的功能,扁平管32还被用作为用于连接在图像传感器14和发光二极管18上的、在附图中为清楚起见而未示出的连接线路的引导通道,所述连接线路穿过该扁平管32被引导至设置在壳体部件4的近侧上的壳体部件52,其中连接在图像传感器14上的连接线路在壳体部件52的近侧上连接到没有示出的图像处理装置,而连接到发光二极管18上的连接线路在壳体部件52的近侧上连接到同样没有示出的电压源上。在图7中示出的实施例中,扁平管32还用于设置两个附加的发光二极管34,它们用于对空心杆2远侧上由图像传感器14采集的区域提供特别亮的照明。此外,使用发光二极管34可能是图7中示出的杆器械和图1-6中示出的杆器械之间的唯一差异。此外要指出的是,在扁平管32中,在设置发光二极管34的部位,可以代替发光二极管34而设置用于引导冲洗液的管,由此使得“连续流动”冲洗是可能的。
在空心杆2中设有管36,管36延伸至壳体部件52中。管36可以在空心杆2中沿空心杆2的纵向方向移动并以这种方式构成推拉元件。为了对管36进行运动控制,在管36的近侧的、接合到壳体部件4中的端部部段上设置了与管36固定连接的滑块38,滑块38在管36的外环周上径向突出并且穿过在壳体部件4上在环周上构成的穿孔40。将穿孔40的尺寸确定为,其能够使滑块38在该穿孔40中进行受限的移动(图1和2)。
管36用作为操纵元件,借助管36可以通过滑杆控制(Kulissensteuerung)使壳体8从图像传感器14和发光二极管18设置在空心杆2的内腔22之内的位置运动到图像传感器14和发光二极管18设置在空心杆2的内腔22之外的位置。为了形成滑杆控制,在管36上构成从其远侧端部起的纵向狭缝42,纵向狭缝42以有限的大小朝向管36的近侧方向延伸(图3和7)。将纵向狭缝42的宽度设置为,使壳体8能够穿过该具有小间隙的纵向狭缝42。在两个彼此相对置地设置的并且在纵向狭缝42的沿该纵向狭缝42的轴向方向延伸的纵向侧44上分别构成有凸起46,这些凸起46横向于纵向狭缝42的纵向延展伸出。两个凸起46形成滑动块,所述滑动块接合(eingreifen)到壳体8的滑杆中。为了形成所述滑杆,在壳体8的两个与管36的纵向狭缝42正交地定向的外侧48上分别构成导向槽50,这些导向槽50自壳体8的外侧24的近侧端部起倾斜地朝壳体8的外侧26的远侧端部延伸。凸起46中的一个分别接合到两个导向槽50之一中。如果管36通过滑块38的相应操纵而朝向远侧方向移动,则是构成在管36上的凸起46接合到壳体8的倾斜定向的导向槽50中,使得壳体8从图像传感器14和发光二极管18设置在空心杆2的内腔22之内的位置中运动到图像传感器14和发光二极管18设置在空心杆的内腔22之外的位置中。在管36朝向近侧方向移动时,壳体8于是再次缩入空心杆2中。
附图标记列表
2 空心杆
4 壳体部件
6 端部
8 壳体
10 端侧
12 凹部
14 图像传感器
16 凹部
18 发光二极管
20 开口
22 内腔
24 外侧
26 外侧
28 凹部
30 端侧
32 扁平管
34 发光二极管
36 管
38 滑块
40 穿孔
42 纵向狭缝
44 纵向侧
46 凸起
48 外侧
50 导向槽
52 壳体部件。
Claims (8)
1.一种杆器械,具有空心杆(2)和具有至少一个在远侧集成在所述空心杆(2)中的壳体(8),所述壳体(8)具有至少一个设置在其中的用于光学检测位于所述空心杆(2)的远侧区域的电子图像传感器(14)和/或设置在其中用于照亮所述空心杆(2)的远侧区域的发光机构,其中,所述壳体(8)能够直线地从所述图像传感器(14)和/或所述发光机构位于所述空心杆(2)的内腔(22)之内的位置运动到所述图像传感器(14)和/或所述发光机构位于所述空心杆(2)的内腔(22)之外的位置,其中,所述壳体(8)能够穿过构成在所述空心杆(2)的环周壁上的开口(20)移动,并且该壳体(8)与构成在所述空心杆(2)的环周壁上的开口(20)相反地背离的内置的外侧(26)支承在至少一个在所述空心杆(2)中引导的长形的并且能够横向于其纵向延展弹性回弹的承载件上,所述承载件在所述空心杆(2)的整个长度上延伸并且固定在所述空心杆(2)的近侧上,以及其中,所述承载件由扁平管(32)构成,其中,连接在所述图像传感器(14)和/或所述发光机构上的连接线路穿过所述扁平管(32)朝向所述空心杆(2)的近侧被引导,其中,所述壳体(8)通过滑杆控制与在所述空心杆(2)中可沿所述空心杆(2)的纵向方向移动的推拉元件运动耦联,该推拉元件由管(36)形成,该管具有与所述空心杆(2)的内径相一致的外径。
2.根据权利要求1所述的杆器械,其中,所述壳体(8)的外置的外侧(24)在所述壳体(8)的在所述空心杆(2)的内腔(22)之内的位置与所述空心杆(2)的环周壁的外侧相齐平。
3.根据权利要求1或2所述的杆器械,其中,在所述壳体(8)的与构成在所述空心杆(2)的环周壁上的开口(20)背离的外侧(26)上构成有沿所述空心杆(2)的纵向方向伸展的凹部(28),所述承载件接合到所述凹部(28)中。
4.根据权利要求1所述的杆器械,其中,构成所述承载件的所述扁平管(32)具有肾形的横截面。
5.根据权利要求1所述的杆器械,其中,所述推拉元件具有至少一个横向于其运动方向定向的凸起(46),所述凸起(46)接合到构成在所述壳体(8)的外侧上且在径向方向上倾斜伸展的导向槽(50)中。
6.根据权利要求1所述的杆器械,其中,构成所述推拉元件的所述管(36)具有纵向狭缝(42),其中,所述壳体(8)接合到所述纵向狭缝(42)中,并且构成在所述纵向狭缝(42)的两个纵向侧(44)上的凸起(46)接合到两个构成在所述壳体(8)的两个彼此相背离的外侧(48)上的导向槽(5)中。
7.根据权利要求1所述的杆器械,其中,该杆器械是医用内窥镜杆器械。
8.根据权利要求1所述的杆器械,其中,所述承载件固定在所述空心杆(2)的近侧端部的区域中。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015216864.6 | 2015-09-03 | ||
| DE102015216864 | 2015-09-03 | ||
| PCT/DE2016/200402 WO2017036479A1 (de) | 2015-09-03 | 2016-08-29 | Schaftinstrument und insbesondere medizinisch-endoskopisches schaftinstrument |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108289593A CN108289593A (zh) | 2018-07-17 |
| CN108289593B true CN108289593B (zh) | 2020-12-29 |
Family
ID=57569853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680051213.4A Active CN108289593B (zh) | 2015-09-03 | 2016-08-29 | 杆器械 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11064867B2 (zh) |
| EP (1) | EP3344111B1 (zh) |
| JP (1) | JP6905509B2 (zh) |
| CN (1) | CN108289593B (zh) |
| DE (1) | DE102016216160A1 (zh) |
| ES (1) | ES2746874T3 (zh) |
| WO (1) | WO2017036479A1 (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9937323B2 (en) | 2014-02-28 | 2018-04-10 | Cook Medical Technologies Llc | Deflectable catheters, systems, and methods for the visualization and treatment of bodily passages |
| PL235947B1 (pl) * | 2016-11-01 | 2020-11-16 | Endoscope Spolka Z Ograniczona Odpowiedzialnoscia | Endoskop giętki |
| FR3075031B1 (fr) * | 2017-12-18 | 2020-01-17 | Imv Technologies | Appareil d'aide a la penetration vaginale prevu pour recevoir un outil de travail |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3921233A1 (de) | 1989-06-28 | 1991-02-14 | Storz Karl Gmbh & Co | Endoskop mit einer am distalen ende angeordneten videoeinrichtung |
| US5569157A (en) * | 1993-05-07 | 1996-10-29 | Olympus Optical Co., Ltd. | Endoscope |
| DE10004264C2 (de) * | 2000-02-01 | 2002-06-13 | Storz Karl Gmbh & Co Kg | Vorrichtung zur intrakorporalen, minimal-invasiven Behandlung eines Patienten |
| JP2002065597A (ja) * | 2000-08-24 | 2002-03-05 | Olympus Optical Co Ltd | 内視鏡用挿入補助具 |
| US7066879B2 (en) * | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| JP4266743B2 (ja) * | 2003-08-08 | 2009-05-20 | オリンパス株式会社 | 内視鏡用フード及び内視鏡用粘膜切除具 |
| US20070203395A1 (en) * | 2006-02-28 | 2007-08-30 | Takayasu Mikkaichi | Cap installable on distal end portion of endoscope |
| US8419717B2 (en) * | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| US20080108869A1 (en) * | 2006-10-20 | 2008-05-08 | Femsuite Llc | Optical surgical device and methods of use |
| US8715270B2 (en) * | 2006-12-01 | 2014-05-06 | Boston Scientific Scimed, Inc. | Multi-part instrument systems and methods |
| WO2008106679A2 (en) * | 2007-03-01 | 2008-09-04 | Campos Jorge A | Face tip assembly for an endoscope |
| DE102007013355A1 (de) * | 2007-03-16 | 2008-09-18 | Dürr Dental GmbH & Co. KG | Diagnosekamera sowie Aufsatz zur Realisierung einer solchen |
| JP5108595B2 (ja) * | 2008-04-04 | 2012-12-26 | オリンパスメディカルシステムズ株式会社 | 内視鏡、先端キャップ付き内視鏡および内視鏡用洗浄シース |
| US8562513B2 (en) * | 2008-05-20 | 2013-10-22 | Olympus Medical Systems Corp. | Endoscope device |
| US8403826B1 (en) * | 2009-02-18 | 2013-03-26 | Integrated Medical Systems International, Inc | Video endoscope for diagnostic and therapeutic usage |
| DE102009041510A1 (de) * | 2009-09-14 | 2011-03-31 | Richard Wolf Gmbh | Endoskopisches Instrument |
| US20120029289A1 (en) * | 2010-07-29 | 2012-02-02 | Cannuflow, Inc. | Optical Cap for Use With Arthroscopic System |
| US20120245416A1 (en) * | 2011-03-24 | 2012-09-27 | Tyco Healthcare Group Lp | Swing-out surgical camera |
| JP5290482B1 (ja) * | 2011-09-14 | 2013-09-18 | オリンパスメディカルシステムズ株式会社 | 内視鏡装置 |
| CN104883991B (zh) * | 2012-09-19 | 2018-08-28 | 南洋理工大学 | 柔性主从式机器人内窥镜检查系统 |
| US9492189B2 (en) * | 2013-03-13 | 2016-11-15 | Covidien Lp | Apparatus for endoscopic procedures |
| US20150182239A1 (en) * | 2014-01-02 | 2015-07-02 | Bfkw, Llc | Endoscopic fixation of a medical device using mucosal capture |
| AU2016340865B2 (en) * | 2015-10-23 | 2019-08-01 | Cook Medical Technologies Llc | Endoscope cap with deflecting channels for endoscopic therapy |
-
2016
- 2016-08-29 CN CN201680051213.4A patent/CN108289593B/zh active Active
- 2016-08-29 JP JP2018511725A patent/JP6905509B2/ja active Active
- 2016-08-29 WO PCT/DE2016/200402 patent/WO2017036479A1/de active Application Filing
- 2016-08-29 US US15/757,075 patent/US11064867B2/en active Active
- 2016-08-29 DE DE102016216160.1A patent/DE102016216160A1/de not_active Withdrawn
- 2016-08-29 EP EP16812670.4A patent/EP3344111B1/de active Active
- 2016-08-29 ES ES16812670T patent/ES2746874T3/es active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US11064867B2 (en) | 2021-07-20 |
| JP2018526131A (ja) | 2018-09-13 |
| ES2746874T3 (es) | 2020-03-09 |
| JP6905509B2 (ja) | 2021-07-21 |
| CN108289593A (zh) | 2018-07-17 |
| US20180256012A1 (en) | 2018-09-13 |
| DE102016216160A1 (de) | 2017-03-09 |
| EP3344111B1 (de) | 2019-07-03 |
| EP3344111A1 (de) | 2018-07-11 |
| WO2017036479A1 (de) | 2017-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3784109B1 (en) | Endoscope with rotatable camera | |
| JP6431678B2 (ja) | 挿入形状検出装置 | |
| JP5143723B2 (ja) | 光導波シース | |
| CN111035347A (zh) | 用于内窥镜的铰接式尖端部分 | |
| CN108289593B (zh) | 杆器械 | |
| US9277855B2 (en) | Endoscopic system for enhanced visualization | |
| US9942452B2 (en) | Optoelectronic module and an imaging apparatus comprising the same | |
| US20130172676A1 (en) | Multi-camera endoscope having fluid channels | |
| WO2004026125A1 (en) | Endoscope | |
| CN110960177A (zh) | 用于内窥镜的铰接式端头部 | |
| JP2012090741A (ja) | 内視鏡装置 | |
| US20200329952A1 (en) | Endoscope having a pivotable handle part | |
| US20120071723A1 (en) | Endoscope apparatus and measurement method | |
| US20090207494A1 (en) | Laparoscopic camera | |
| US20160198936A1 (en) | Holding mechanism for endoscopic guide member, and endoscope | |
| US10433710B1 (en) | In-vivo imaging and access system utilizing a canted working channel and a ring illuminated surgical camera | |
| KR101613271B1 (ko) | 카테터 | |
| JP2011101802A (ja) | 内視鏡セット | |
| WO2019225082A1 (ja) | 内視鏡 | |
| WO2017069007A1 (ja) | 内視鏡用先端フード | |
| CN111345770A (zh) | 用于内窥镜的铰接式尖端部分 | |
| JP5380601B2 (ja) | 内視鏡装置 | |
| KR101287960B1 (ko) | 내시경 장치 | |
| KR20150043258A (ko) | 카테터 | |
| JP2017018274A (ja) | ステント留置用内視鏡フードおよび内視鏡システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |