CN107425463B - 一种新型的输电线路巡检机器人上下线装置 - Google Patents
一种新型的输电线路巡检机器人上下线装置 Download PDFInfo
- Publication number
- CN107425463B CN107425463B CN201710332641.0A CN201710332641A CN107425463B CN 107425463 B CN107425463 B CN 107425463B CN 201710332641 A CN201710332641 A CN 201710332641A CN 107425463 B CN107425463 B CN 107425463B
- Authority
- CN
- China
- Prior art keywords
- inspection robot
- lifting
- cableway
- transmission line
- bearing platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G1/00—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines
- H02G1/02—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines for overhead lines or cables
Abstract
本发明实施例涉及一种新型的输电线路巡检机器人上下线装置,包括铁塔,铁塔连接有过渡导轨,导轨下方通过提升装置连接有承载平台,承载平台上安装有巡检机器人,巡检机器人上安装有可收拢或伸展的行走轮,所述巡检机器人可通过提升装置在地面与过渡导轨之间上下升降,对应过渡导轨上设置有向内侧盘弯的弧形段,弧形段与两侧的过渡导轨之间构成适于巡检机器人的行走轮穿过的升降区间,当行走轮上升并穿过升降区间后,行走轮通过伸展并落在弧形段两侧的过渡导轨上;提升装置包括提升索道和卷扬机,承载平台分别与提升索道和卷扬机连接,且提升索道为柔性索道;不需要人工登塔作业,降低操作人员的劳动强度,拉线式柔性索道,结构简单,安装方便。
Description
技术领域
本发明实施例涉及输电线路巡检机器人上下线装置领域,具体涉及一种新型的输电线路巡检机器人上下线装置。
背景技术
目前,沿地线行走的输电线路巡检机器人,是一种用于输电线路设备巡检的特种机器人,其可在高压、特高压输电线路上沿地线行走,通过自身搭载的各种检测设备,对输电线路进行巡检及故障分析,不仅大大降低运维人员的劳动强度,还可提供更加准确全面的巡检数据。
一般地,把巡检机器人安放到工作位置需要吊装来实现:利用挂载在地线上的起吊装置,把巡检机器人吊装到地线附近,再通过人工辅助的方式把巡检机器人挂到地线上,这种方法人工劳动强度大、工作效率低,且存在高空作业带来的风险。
发明内容
本发明实施例主要解决的技术问题是提供一种结构简单、合理的新型的输电线路巡检机器人上下线装置,不需要人工登塔作业,自带动力系统,降低操作人员的劳动强度,拉线式柔性索道,结构简单,安装方便,并能实现快速使巡检机器人上线或下线。
为解决上述技术问题,本发明采用的一个技术方案是:一种新型的输电线路巡检机器人上下线装置,包括铁塔,铁塔上连接有过渡导轨,过渡导轨下方通过提升装置连接有承载平台,承载平台上安装有巡检机器人,巡检机器人上安装有可收拢或伸展的行走轮,其特征是,所述巡检机器人可通过提升装置在地面与过渡导轨之间上下升降,对应过渡导轨上设置有向内侧盘弯的弧形段,弧形段与两侧的过渡导轨之间构成适于巡检机器人的行走轮穿过的升降区间,当行走轮上升并穿过升降区间后,行走轮通过伸展并落在弧形段两侧的过渡导轨上;
提升装置包括提升索道和卷扬机,承载平台分别与提升索道和卷扬机连接,使承载平台沿提升索道上下升降,且提升索道为柔性索道。
工作时:两个行走轮在低于弧形段时,处于收拢状态,通过提升装置(例如卷扬机)提升承载平台,使巡检机器人上升,同时使收拢状态的行走轮穿过升降区间,当行走轮在高于弧形段时,两行走轮展开,巡检机器人下降,使行走轮落在弧形段两侧的过渡导轨上,即完成巡检机器人的上线;如需下线时,提升装置驱动承载平台,将巡检机器人提升,然后行走轮收拢,同样沿升降区间下降并落到地面,即完成下线,整个过程由操作人员远程控制,无需人工高空作业,有效降低事故安全隐患以及提高工作效率。
另外,柔性的提升索道,其拆装方便,结构简单,有效解决现有技术中安装复杂、难度大的难题。
优选地,弧形段通过第一托架与铁塔连接,弧形段两侧的过渡导轨通过第二托架与铁塔连接,第一托架的长度小于第二托架的长度;第一托架的长度小于第二托架的长度,形成弧形段,从而构成提升区间,第二托架为可调式,使得弧形段的弧度可调,从而使提升区间的面积可调,适应不同尺寸的行走轮。
优选地,第一托架两侧的铁塔上安装有索道挂架,提升索道的一端与索道挂架连接;方便柔性的提升索道一端与铁塔连接。
优选地,承载平台通过上下两导向套套设在提升索道上,通过卷扬机使承载平台沿提升索道上下升降;导向套与柔性的提升索道构成导向连接,使承载平台能够更好地上下升降。
优选地,过渡导轨上设置有向铁塔方向盘弯的弧形段;同样地,弧形段还可以向外盘弯,即相对铁塔的相反方向盘弯,同样可以达到相同的效果,只是向内盘弯的结构更加紧凑,合理。
优选地,所述卷扬机通过安装板固定在地面,提升索道的另一端与安装板连接;安装方便,简单,快速,效率高。
优选地,第二托架通过紧固件呈可调式安装在铁塔上;调节第二托架,可以调节弧形段的弧度。
优选地,所述提升索道为柔性钢索;钢索结构坚固,同时具备柔性特点,方便快速安装。
优选地,承载平台包括承载座、承载板以及两调节杆,巡检机器人设置在承载座上,承载板的上下端安装有两导向套,两导向套分别通过两调节杆与承载座上下两端活动连接,两调节杆之间的承载座上通过连接板与承载板活动连接;倾斜式设置的承载板,适应提升索道的倾斜度设置,而且导向套设置在承载板上,并且承载座承载巡检机器人,并且与承载板构成活动连接,方便调节,而两调节杆可以对承载座相对承载板进行调节,调节简单、方便。
优选地,第一托架上安装有定滑轮,卷扬机包括起吊线缆,起吊线缆与定滑轮连接。
本发明实施例的有益效果是:
本发明一种新型的输电线路巡检机器人上下线装置,其结构简单、合理,不需要人工登塔作业,自带动力系统,降低操作人员的劳动强度,拉线式柔性索道,结构简单,安装方便,并能实现快速使巡检机器人上线或下线。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
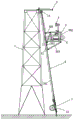
图1是本发明的结构示意图。
图2是本发明中铁塔的俯视图。
图3是本发明另一角度的结构示意图。
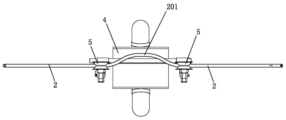
图4是本发明中行走轮处于弧形段下方的结构示意图。
图5是本发明中行走轮落在过渡导轨上的结构示意图。
实施例
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。
如图1至图5所示,一种新型的输电线路巡检机器人上下线装置,包括铁塔1,铁塔1上连接有过渡导轨2,过渡导轨2下方通过提升装置连接有承载平台3,承载平台3上安装有巡检机器人4,巡检机器人4上安装有可收拢或伸展的行走轮5,其特征是,所述巡检机器人4可通过提升装置在地面与过渡导轨2之间上下升降,对应过渡导轨2上设置有向内侧盘弯的弧形段201,弧形段201与两侧的过渡导轨2之间构成适于巡检机器人4的行走轮5穿过的升降区间202,当行走轮5上升并穿过升降区间202后,行走轮5通过伸展并落在弧形段201两侧的过渡导轨2上;
提升装置包括提升索道6和卷扬机7,承载平台3分别与提升索道6和卷扬机7连接,使承载平台3沿提升索道6上下升降,且提升索道6为柔性索道。
工作时:两个行走轮5在低于弧形段201时,处于收拢状态,通过卷扬机7提升承载平台3,使巡检机器人4上升,同时使收拢状态的行走轮5穿过升降区间202,当行走轮5在高于弧形段201时,两行走轮5展开,巡检机器人4下降,使行走轮5落在弧形段201两侧的过渡导轨2上,即完成巡检机器人4的上线;如需下线时,卷扬机7驱动承载平台3,将巡检机器人4提升,然后行走轮5收拢,同样沿升降区间202下降并落到地面,即完成下线,整个过程由操作人员远程控制,无需人工高空作业,有效降低事故安全隐患以及提高工作效率。
另外,柔性的提升索道6,其拆装方便,结构简单,有效解决现有技术中安装复杂、难度大的难题。
优选地,弧形段201通过第一托架8与铁塔1连接,弧形段201两侧的过渡导轨2通过第二托架9与铁塔1连接,第一托架8的长度小于第二托架9的长度;第一托架8的长度小于第二托架9的长度,形成弧形段201,从而构成提升区间202,第二托架9为可调式,使得弧形段201的弧度可调,从而使提升区间202的面积可调,适应不同尺寸的行走轮。
优选地,第一托架8两侧的铁塔1上安装有两索道挂架10,两提升索道6的一端与两索道挂架10连接;方便柔性的提升索道6一端与铁塔1连接。
优选地,承载平台3通过上下两导向套11套设在提升索道6上,通过卷扬机7使承载平台3沿提升索道6上下升降;导向套11与柔性的提升索道6构成导向连接,使承载平台3能够更好地上下升降。
优选地,过渡导轨2上设置有向铁塔1方向盘弯的弧形段201;同样地,弧形段201还可以向外盘弯,即相对铁塔1的相反方向盘弯,同样可以达到相同的效果,只是向内盘弯的结构更加紧凑,合理。
优选地,所述卷扬机7通过安装板12固定在地面,提升索道6的另一端与安装板12连接;安装方便,简单,快速,效率高。
优选地,第二托架9通过紧固件13呈可调式安装在铁塔1上;调节第二托架9,可以调节弧形段201的弧度。
优选地,所述提升索道6为柔性钢索;钢索结构坚固,同时具备柔性特点,方便快速安装。
优选地,承载平台3包括承载座301、承载板302以及两调节杆303,巡检机器人4设置在承载座301上,承载板302的上下端安装有两导向套11,两导向套11分别通过两调节杆303与承载座301上下两端活动连接,两调节杆303之间的承载座301上通过连接板13与承载板302活动连接;倾斜式设置的承载板302,适应提升索道6的倾斜度设置,而且导向套11设置在承载板302上,并且承载座301承载巡检机器人4,并且与承载板302构成活动连接,方便调节,而两调节杆303可以对承载座301相对承载板302进行调节,调节简单、方便。
优选地,第一托架8上安装有定滑轮14,卷扬机7包括起吊线缆701,起吊线缆701与定滑轮14连接。
需要说明的是,本发明的说明书及其附图中给出了本发明的较佳的实施例,但是,本发明可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本发明内容的额外限制,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上面列举的各种实施例,均视为本发明说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
Claims (10)
1.一种新型的输电线路巡检机器人上下线装置,包括铁塔,铁塔上连接有过渡导轨,过渡导轨下方通过提升装置连接有承载平台,承载平台上安装有巡检机器人,巡检机器人上安装有可收拢或伸展的行走轮,其特征是,所述巡检机器人可通过提升装置在地面与过渡导轨之间上下升降,对应过渡导轨上设置有向内侧盘弯的弧形段,弧形段与两侧的过渡导轨之间构成适于巡检机器人的行走轮穿过的升降区间,当行走轮上升并穿过升降区间后,行走轮通过伸展并落在弧形段两侧的过渡导轨上;两个行走轮在低于弧形段时,处于收拢状态,通过卷扬机提升承载平台,使巡检机器人上升,同时使收拢状态的行走轮穿过升降区间,当行走轮在高于弧形段时,两行走轮展开,巡检机器人下降,使行走轮落在弧形段两侧的过渡导轨上,提升装置包括提升索道和卷扬机,承载平台分别与提升索道和卷扬机连接,使承载平台沿提升索道上下升降,且提升索道为柔性索道。
2.根据权利要求1所述新型的输电线路巡检机器人上下线装置,其特征在于,弧形段通过第一托架与铁塔连接,弧形段两侧的过渡导轨通过第二托架与铁塔连接,第一托架的长度小于第二托架的长度。
3.根据权利要求2所述新型的输电线路巡检机器人上下线装置,其特征在于,第一托架两侧的铁塔上安装有索道挂架,提升索道的一端与索道挂架连接。
4.根据权利要求1所述新型的输电线路巡检机器人上下线装置,其特征在于,承载平台通过上下两导向套套设在提升索道上,通过卷扬机使承载平台沿提升索道上下升降。
5.根据权利要求1所述新型的输电线路巡检机器人上下线装置,其特征在于,过渡导轨上设置有向铁塔方向盘弯的弧形段。
6.根据权利要求3所述新型的输电线路巡检机器人上下线装置,其特征在于,所述卷扬机通过安装板固定在地面,提升索道的另一端与安装板连接。
7.根据权利要求2所述新型的输电线路巡检机器人上下线装置,其特征在于,第二托架通过紧固件呈可调式安装在铁塔上。
8.根据权利要求1至7任一项所述新型的输电线路巡检机器人上下线装置,其特征在于,所述提升索道为柔性钢索。
9.根据权利要求4所述新型的输电线路巡检机器人上下线装置,其特征在于,承载平台包括承载座、承载板以及两调节杆,巡检机器人设置在承载座上,承载板的上下端安装有两导向套,两导向套分别通过两调节杆与承载座上下两端活动连接,两调节杆之间的承载座上通过连接板与承载板活动连接。
10.根据权利要求2所述新型的输电线路巡检机器人上下线装置,其特征在于,第一托架上安装有定滑轮,卷扬机包括起吊线缆,起吊线缆与定滑轮连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710332641.0A CN107425463B (zh) | 2017-05-12 | 2017-05-12 | 一种新型的输电线路巡检机器人上下线装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710332641.0A CN107425463B (zh) | 2017-05-12 | 2017-05-12 | 一种新型的输电线路巡检机器人上下线装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107425463A CN107425463A (zh) | 2017-12-01 |
| CN107425463B true CN107425463B (zh) | 2023-04-07 |
Family
ID=60424934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710332641.0A Active CN107425463B (zh) | 2017-05-12 | 2017-05-12 | 一种新型的输电线路巡检机器人上下线装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107425463B (zh) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108649484B (zh) * | 2018-05-18 | 2020-03-27 | 云南电网有限责任公司电力科学研究院 | 共享杆塔用适应全地形检修的设备箱柜组件 |
| CN108458889B (zh) * | 2018-06-29 | 2024-02-20 | 洛阳视距智能科技有限公司 | 一种电力巡检传感设备模拟试验平台 |
| CN109659859A (zh) * | 2019-01-28 | 2019-04-19 | 广东科凯达智能机器人有限公司 | 输电线路智能巡检系统 |
| CN110328676B (zh) * | 2019-07-23 | 2022-08-12 | 广州科智电力科技有限公司 | 一种高压线全自动巡检机器人 |
| CN110277749B (zh) * | 2019-07-23 | 2020-10-23 | 常州海恩德智能电力科技股份有限公司 | 一种能爬杆、爬线的高压线巡检机器人 |
| CN111716320A (zh) * | 2020-06-01 | 2020-09-29 | 国电南瑞科技股份有限公司 | 一种柔性轨道的巡线机器人自动上下线装置 |
| CN112038975A (zh) * | 2020-09-10 | 2020-12-04 | 云南电网有限责任公司电力科学研究院 | 一种高空作业巡检机器人上下线系统 |
| CN114278146B (zh) * | 2021-12-28 | 2023-07-04 | 国网天津市电力公司建设分公司 | 一种面向高压输电铁塔的机器人智能化组塔施工方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN203932810U (zh) * | 2014-05-22 | 2014-11-05 | 郭德江 | 行走于架空地线上的驾鞍式巡线装置及该装置的跨塔导轨 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3756126B2 (ja) * | 2002-04-17 | 2006-03-15 | ファナック株式会社 | ロボットの線条体案内装置 |
| CN202943630U (zh) * | 2012-12-10 | 2013-05-22 | 中国科学院沈阳自动化研究所 | 巡检机器人的行走夹持复合机构 |
| CN105048336B (zh) * | 2015-06-03 | 2017-03-22 | 武汉大学 | 一种耐张杆塔巡线机器人自动上下线装置 |
| CN104993422B (zh) * | 2015-06-29 | 2017-05-10 | 广东电网有限责任公司电力科学研究院 | 巡线机器人上下线装置及设有其的巡线机器人上下线系统 |
| CN106374388B (zh) * | 2016-10-21 | 2018-05-29 | 国网山东省电力公司电力科学研究院 | 一种架空地线全程无障碍的巡检机器人系统及方法 |
| CN206712337U (zh) * | 2017-05-12 | 2017-12-05 | 广东科凯达智能机器人有限公司 | 新型的输电线路巡检机器人上下线装置 |
-
2017
- 2017-05-12 CN CN201710332641.0A patent/CN107425463B/zh active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN203932810U (zh) * | 2014-05-22 | 2014-11-05 | 郭德江 | 行走于架空地线上的驾鞍式巡线装置及该装置的跨塔导轨 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107425463A (zh) | 2017-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107425463B (zh) | 一种新型的输电线路巡检机器人上下线装置 | |
| CN105442458B (zh) | 一种斜拉桥异形塔柱的斜拉索挂设安装方法 | |
| CN205222445U (zh) | 用于风力发电机组叶片的吊装装置 | |
| CN110510527A (zh) | 一种高边坡变截面边坡预制块的安装系统及其施工方法 | |
| CN108179695A (zh) | 一种模块化装配式应急桥及其架设方法 | |
| CN202544476U (zh) | 塔吊式抱杆 | |
| CN205387439U (zh) | 一种桅杆起吊装置 | |
| CN104973517A (zh) | 一种用于烧结机头部设备安装的电动龙门平台及其使用方法 | |
| CN202245865U (zh) | 烧结机头轮吊装装置 | |
| CN214935394U (zh) | 一种自动调节的钢拱肋定位吊具 | |
| JP3150572B2 (ja) | 橋梁架設装置 | |
| CN105846351A (zh) | 巡线机器人机械结构及其越障方法 | |
| CN110040638B (zh) | 一种安装悬索桥劲性梁的缆载吊机装置及安装方法 | |
| CN206712337U (zh) | 新型的输电线路巡检机器人上下线装置 | |
| CN2868965Y (zh) | 汽车起重机吊装装置 | |
| CN101804944A (zh) | 门式起重机钢丝绳的更换装置 | |
| CN110654977A (zh) | 一种柔直换流阀子模块更换工装及方法 | |
| CN205653070U (zh) | 一种可监测拉力的龙门起重机 | |
| CN205275061U (zh) | 一种半门式起重机 | |
| CN105200922B (zh) | 一种钢桁梁节段地面拼装运输装置和运输方法 | |
| CN208179557U (zh) | 一种巡检机器人的手臂机构 | |
| CN104192469A (zh) | 一种电塔滑送运输装置及其使用方法 | |
| CN106877231B (zh) | 一种用于抢修输电线路的支架车 | |
| CN104876165A (zh) | 光伏组件移动式安装检修平台 | |
| CN204859074U (zh) | 光伏组件移动式安装检修平台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB03 | Change of inventor or designer information |
Inventor after: Li Fang Inventor after: Jia Shaochun Inventor after: Fan Guangmian Inventor after: Wu Jixian Inventor after: Liu Jintao Inventor before: Li Fang Inventor before: Jia Shaochun Inventor before: Fan Guangmian Inventor before: Wu Jixian Inventor before: Liu Miantao |
|
| CB03 | Change of inventor or designer information | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |