CN105277084B - 带有探测单元和装配辅助件的装置及装配探测单元的方法 - Google Patents
带有探测单元和装配辅助件的装置及装配探测单元的方法 Download PDFInfo
- Publication number
- CN105277084B CN105277084B CN201510421327.0A CN201510421327A CN105277084B CN 105277084 B CN105277084 B CN 105277084B CN 201510421327 A CN201510421327 A CN 201510421327A CN 105277084 B CN105277084 B CN 105277084B
- Authority
- CN
- China
- Prior art keywords
- detection unit
- reference element
- assembly aid
- aid
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24428—Error prevention
- G01D5/24433—Error prevention by mechanical means
- G01D5/24442—Error prevention by mechanical means by mounting means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Optical Transform (AREA)
- Mounting And Adjusting Of Optical Elements (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Optical Systems Of Projection Type Copiers (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
本发明涉及带有探测单元和装配辅助件的装置及装配探测单元的方法,具体而言,涉及一种带有探测单元(2)和装配辅助件(3)的装置,探测单元(2)可利用该装配辅助件(3)绕参考元件(4)的旋转轴线(D)旋转。装配辅助件(3)构造成,在此弹簧般地将探测单元(2)挤压到参考元件(4)处。
Description
技术领域
本发明涉及一种带有探测单元和用于调整该探测单元的装配辅助件的装置。
此外本发明涉及一种用于将位置测量设备的探测单元装配在对象处的方法。
背景技术
位置测量设备尤其地使用在加工机械中以用于测量工具相对于待加工的工件的相对位置,使用在坐标测量机械中以用于获得检验对象的位置和尺寸,以及也使用在半导体工业中例如使用在晶片步进式曝光机(Waferstepper)以及键合机中。在此,将标尺直接安装在驱动单元(例如线性马达)处或者将标尺安装在通过驱动单元驱动的构件处。位置测量设备的探测单元以相对于运动的标尺静止的方式布置在另一机械部件处,该另一机械部件的位置应被测量。
由于对位置测量的分辨率或精度的要求越来越高,在装配时探测单元相对于标尺的精确的关联越来越重要。为了实现这种所需的关联,已经已知不同的措施。
例如,在文献EP 0 397 970 A1中描述了这种类型的探测单元和位置测量设备。为了装配探测单元,设置装配辅助件作为在待测量的对象和探测单元之间的构件。装配辅助件包括销,探测单元可借助于带有偏心的附接部的调整螺钉绕该销旋转或摆动。该装配辅助件的中间连接部(Zwischenschaltung)需要相对多的结构空间。此外,为了达到无间隙的调整,对加工公差的要求很高。
发明内容
因此本发明的目标是,给出一种带有位置测量设备的探测单元和装配辅助件的装置,利用该装置使带有高精度的简单装配成为可能。
该目标通过带有根据本发明的装置实现,该装置带有探测单元和用于调整所述探测单元的装配辅助件,所述装配辅助件构造成,如此将所述探测单元保持在所述装配辅助件处,即使得所述探测单元借助于承载该探测单元的装配辅助件绕参考元件的旋转轴线摆动,其中所述装配辅助件包括这样的部件,即该部件在此将所述探测单元挤压到所述参考元件处,并且所述装配辅助件构造成,该装配辅助件在完成调整之后可从所述探测单元上移除。
此外本发明的目标是,给出一种用于尽可能简单地装配的方法,利用该方法实现在探测单元和标尺之间的关联的所需精度。
该目标通过根据本发明的用于将位置测量设备的探测单元装配在对象处的方法实现,该方法带有以下方法步骤:- 提供带有旋转轴线的参考元件;- 如此使所述探测单元与装配辅助件相连接,即所述装配辅助件将所述探测单元挤压到所述参考元件处;- 通过使承载所述探测单元的装配辅助件绕所述参考元件的旋转轴线摆动,调整所述探测单元;-在已调整的旋转位置中位置固定地将所述探测单元固定在所述对象处;- 从所述探测单元上移除所述装配辅助件。
从在本发明中阐述的措施中得到根据本发明的装置和根据本发明的方法的有利的实施方案。
附图说明
根据以下结合图纸对实施例进行的描述来解释本发明的其它细节和优点。
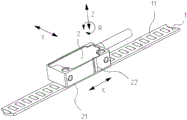
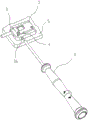
图1显示了长度测量设备的标尺和探测单元;
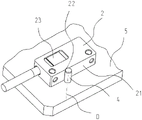
图2显示了在第一装配步骤中的探测单元;
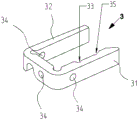
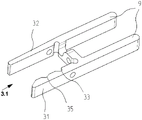
图3显示了装配辅助件;
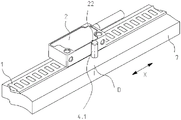
图4显示了在第二装配步骤中的探测单元以及装配辅助件;
图5显示了在已调整的状态中的探测单元;
图6显示了用于实施第一装配步骤的另一可行性;
图7显示了用于利用工具调整探测单元的可行性;
图8显示了装配辅助件的第二实施例;
图9显示了在第二装配步骤中的探测单元以及根据图8的装配辅助件,以及
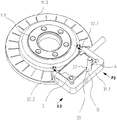
图10显示了本发明在角度测量设备中的应用。
具体实施方式
下面根据图1至5和7解释根据本发明的装置的第一实施例。
所示出的位置测量设备实施成长度测量设备并且包括标尺1和可相对于标尺1在测量方向X上运动的探测单元2。标尺1载有递增式测量刻度11,其可由探测单元2的检测单元探测。在探测测量刻度11时,检测单元以已知的方式产生与位置相关的周期性的电测量信号。在此,探测单元2包括对于探测射线束可透射的探测窗23,其在位置测量时待探测的标尺1的方向上指向,并且因此在图1中不可见。根据图2,4,5以及7的没有标尺1的视图显示了探测单元2的探测窗23。
在将探测单元2装配到待测量的对象5处时,应根据探测原理的类型并且根据测量刻度11的刻度周期遵守规定的安装尺寸(Anbaumass)。该安装尺寸由位置测量设备的制造商预定并且在安装到待测量的对象5处时使用者必须遵守该安装尺寸。在图1中绘出的垂直于测量方向X的方向Z和Y上的安装尺寸通常可相对简单地借助于止挡部和间隔保持件遵守。但是已表明,相对困难地可调节探测单元2相对于标尺1的角度方面的关联。在此这涉及角位置R。该角位置R是绕轴线Z的旋转角度,其中Z垂直于测量刻度11的平面取向。也就是说方向Z是这样的方向,即标尺1在该方向上由探测单元2探测。角度R也被称为偏转角或莫尔波纹角(Moiré-Winkel),并且该角度的调节被称为莫尔波纹调节。对于探测单元2和标尺1的每个组合都应独立地调节该角度方面的关联。
现在根据本发明借助于装配辅助件3调节探测单元2的所需角位置或旋转位置,即角度R。在调整期间监视探测装置2的电探测信号,其中探测信号中的多个的振幅和/或彼此的相位是用于探测信号的品质的度量并且由此也是用于在探测单元2和标尺1之间所需的关联的品质的度量。
装配辅助件3如此构造,即使得探测单元2可绕参考元件4的旋转轴线D旋转。旋转轴线D在此平行于在图1中绘出的轴线Z伸延。
图2显示了在第一装配步骤中的探测单元2。在此参考元件4是销,其位置固定地固定在待测量的对象5处。该参考元件4形成旋转轴线D,为了调整波纹角使探测单元2绕该旋转轴线D旋转。代替销也可使用套管。
探测单元2构造成用于通过贴靠与参考元件4一起形成形状配合部,其横向于旋转轴线D在方向X,Y上相对于参考元件4束缚探测单元2。由此使绕通过该形状配合部明确地限定的旋转轴线D的旋转运动成为可能。通过以下方式以有利的方式形成该形状配合部,即在探测单元2的外壁21中设置有凹口22。在该示例中该凹口22构造成V形的凹槽或切口(圆形的参考元件4的外面可被插入该凹槽或切口中)并且与圆形的参考元件4的外面一起形成旋转支承部。凹口22尽可能布置在探测部的重心附近,即与探测窗23的距离尽可能短。
现在根据本发明设置在图3中详细示出的装配辅助件3,其构造成如此将探测单元2保持在装配辅助件3处,即使得探测单元2可借助于承载探测单元2的装配辅助件3绕参考元件4的旋转轴线D摆动。该保持如此实现,即装配辅助件3将探测单元2挤压到参考元件4处。由此保证了探测单元2无间隙地贴靠到参考元件4处。该保持也通过以下方式实现,即装配辅助件3与探测单元2一起形成抗扭的形状配合部,其保证探测单元2可借助于装配辅助件3绕旋转轴线D旋转。在图4中示出了另一装配步骤,在其中装配辅助件3在方向+X上被推上到探测单元2上,并且装配辅助件3将探测单元2挤压到销形的参考元件4处,并且在装配辅助件3和探测单元2之间建立抗扭的形状配合部。
装配辅助件3具有两个彼此相对的臂31,32,其包围探测单元2并且以夹持的方式在其之间容纳和保持探测单元2。为了产生夹持力,两个臂31,32中的至少一个构造成弹簧般弹性的,从而将探测单元2挤压到参考元件4处。臂31和32如此产生力F1和反作用力F2,即一方面探测单元2以夹持的方式保持在装配辅助件3处,并且另一方面探测单元2被挤压到参考元件4处。如可从图4中看出的那样,尤其有利的是,装配辅助件3在所示出的装配位置中也形状配合地如此固定在参考元件4处,即在方向X,Y上即横向于旋转轴线D确保位置固定的束缚。该形状配合部通过参考元件4的圆形的外面和在装配辅助件3中对应的尤其地再次以V形凹槽或切口的形式的凹口33形成。由此探测单元2夹紧在参考元件4和装配辅助件3的臂32之间,并且参考元件4夹紧在探测单元2和装配辅助件3的臂31之间。
在所示出的实施例中,探测窗23以及由此同样探测单元2的凹口22不是布置在中间(在X方向上观察)。为了在这种情况中实现装配辅助件3备选地也可从-X的方向上被推上到探测单元2上,在装配辅助件3中存在另一凹口35。现在如果在图4中绘出的-X方向上推上装配辅助件3,则凹口35与参考元件4形状配合地共同作用。
仅仅通过设置装配辅助件3已经改进了在装配和调整期间探测装置2的可操作性。但是通过针对性的措施还可进一步改进可操作性。如在图3中示出的那样,为此可在装配辅助件3中设置至少一个孔34,其横向于旋转轴线D伸延。该孔34可如此设计尺寸,即可尽可能准确配合地插入工具6例如螺丝起子,以使装配辅助件3以及夹紧在其中的探测单元2绕旋转轴线D尤其灵敏地摆动,如图7显示的那样。这种设计方案尤其适合用于狭窄的安装情况。可为有利的是,设置多个这种孔34,其可在X-Y平面之内从不同的侧边或方向接近。
装配辅助件3如此构造,即在完成调节探测单元2和将探测单元2装配到待测量的对象5处之后装配辅助件可从探测单元2处移除。装配辅助件3可在垂直于旋转轴线D的方向上以有利的方式在测量方向X上在克服两个臂31,32的夹持力的情况下从探测单元2上且从参考元件4上被拉走。如果出于空间原因应为需要的,也可从待测量的对象处移除参考元件4。在图5中示出了在完成调整之后位置固定地固定在待测量的对象5处的探测单元2。例如可通过未示出的螺钉或者通过粘合剂实现在待测量的对象5处的位置固定的固定。
图6显示了用于形成参考元件的另一可行性。在该示例中参考元件4.1设置在待测量的对象7处,标尺1固定在该对象处。现在,参考元件4.1一方面可用作用于标尺1取向的止挡部,并且另一方面也用于根据本发明调整探测单元2。
下面根据图8和9解释另一装配辅助件3.1。在此,相同作用的构件设有与在以上解释的实施例相同的参考标号。
装配辅助件3.1再次具有两个臂31,32,其形成间隙,在该间隙中一方面以夹紧的方式保持探测单元2,并且另一方面将探测单元2挤压到参考元件4处。与以上解释的装配辅助件3不同地,在装配辅助件3.1中一体地模制有手柄9。该手柄9构造成臂31,32的延长部。一方面通过手柄形成把手以及杠杆该手柄9可简化装配辅助件3.1的调整,并且另一方面由此也可消除夹持力,以简化装配辅助件3.1从探测单元2上的拉走。在此该功能与晒衣夹相似。
本发明也可应用在角度测量设备中。下面根据图10详细解释实施例。为了测量角度再次设置探测单元2,其探测标尺1.3的测量刻度11.3。在这种情况中标尺1.3实施成刻度盘,备选地标尺1.3也可构造成圆筒的形式,其中测量刻度那么可设置在端侧或周面上。在这些情况中在装配到待测量的对象处时也可以由制造者预定的精度装配探测单元2。为此再次设置装配辅助件3.3,可利用该装配辅助件使探测单元2绕参考元件4的旋转轴线D旋转。探测单元2的外壁具有以切口的形式的凹口22,其与参考元件4的圆形的表面一起形成形状配合部,如以上已经解释的那样。与以上解释的示例不同地,用于夹持地包围探测单元2的装配辅助件3.3的臂31.1,32.1,32.2设计成稍微不同。用于夹持地将探测单元2保持在装配辅助件3.3处并且用于将探测单元2挤压到参考元件4处的力F1,F2通过两个臂形的区段32.1和32.2引入。在这种情况中臂31.1用作支座,以用于一方面将探测单元2无间隙地挤压到参考元件4的一侧处并且另一方面将装配辅助件3.3无间隙地挤压到参考元件4的相对而置的侧边处。
以上解释的夹持力F1,F2通过装配辅助件3,3.1,3.3的部件引入。该部件引入这样的力,即其将探测单元2挤压到参考元件4,4.1处,其中概念挤压意味着压靠。在此有利的是,该部件是弹性的或弹簧般的部件,以便即使在探测单元2绕参考元件4,4.1旋转期间也保证无间隙的接触。尤其有利的是,该力通过装配辅助件3,3.1,3.3的臂31,32,31.1,32.1,32.2中的至少一个的弹性的或弹簧般的构造而实现,其将探测单元2夹持地保持在装配辅助件3,3.1,3.3处。
已经根据尤其有利的光电探测原理示例性地解释了本发明。在此,探测单元2包括对于探测射线束可透射的探测窗23,其在位置测量时待探测的标尺1的方向上指向。但是本发明不应限制于此并且也可成功地转用在感应的、磁性的或电容的探测原理中。
Claims (12)
1.一种带有探测单元(2)和用于调整所述探测单元(2)的装配辅助件(3,3.1,3.3)的装置,其特征在于,
所述装配辅助件(3,3.1,3.3)构造成,如此将所述探测单元(2)保持在所述装配辅助件(3,3.1,3.3)处,即使得所述探测单元(2)可借助于承载该探测单元的装配辅助件(3,3.1,3.3)绕参考元件(4,4.1)的旋转轴线(D)摆动,其中所述装配辅助件(3,3.1,3.3)包括这样的部件(31,32;31.1,32.1,32.2),即该部件在此将所述探测单元(2)挤压到所述参考元件(4,4.1)处,并且所述装配辅助件(3,3.1,3.3)构造成,该装配辅助件在完成调整之后可从所述探测单元(2)上移除。
2.根据权利要求1所述的装置,其特征在于,所述探测单元(2)构造成与所述参考元件(4,4.1)一起形成形状配合部,该形状配合部在横向于所述旋转轴线(D)的方向上相对于所述参考元件(4,4.1)束缚所述探测单元(2),但是允许绕所述旋转轴线(D)的旋转运动。
3.根据权利要求2所述的装置,其特征在于,为了形成所述形状配合部在所述探测单元(2)的外壁(21)处设置有凹口(22),所述参考元件(4,4.1)可靠放到该凹口处。
4.根据权利要求3所述的装置,其特征在于,所述凹口(22)具有V形凹槽。
5.根据前述权利要求中任一项所述的装置,其特征在于,所述装配辅助件(3,3.1,3.3)具有至少两个彼此相对的臂(31,32;31.1,32.1,32.2),所述臂在至少两个相对而置的侧边处夹持地包围所述探测单元(2),其中所述臂(31;31.1,31.2)中的至少一个构造成弹性的,以将所述探测单元(2)夹紧到所述参考元件(4,4.1)处。
6.根据前述权利要求1-4中任一项所述的装置,其特征在于,所述装配辅助件(3,3.1,3.3)构造成与所述参考元件(4,4.1)一起形成形状配合部,该形状配合部在横向于所述旋转轴线(D)的方向上相对于所述参考元件(4,4.1)束缚所述装配辅助件(3,3.1,3.3),但是允许所述装配辅助件(3,3.1,3.3)绕所述旋转轴线(D)的旋转运动。
7.根据前述权利要求1-4中任一项所述的装置,其特征在于,所述装配辅助件(3,3.1,3.3)具有至少一个开口(34),工具(6)可插入到该开口(34)中,以由此使所述装配辅助件(3,3.1,3.3)绕所述旋转轴线(D)摆动。
8.根据前述权利要求1-4中任一项所述的装置,其特征在于,手柄(9)模制到所述装配辅助件(3.1)处,以使所述装配辅助件(3.1)绕所述旋转轴线(D)摆动。
9.一种位置测量设备,带有标尺(1,1.3)和根据前述权利要求中任一项所述的装置。
10.一种用于将位置测量设备的探测单元(2)装配在对象(5)处的方法,该方法带有以下方法步骤:
- 提供带有旋转轴线(D)的参考元件(4,4.1);
- 如此使所述探测单元(2)与装配辅助件(3,3.1,3.3)相连接,即所述装配辅助件(3,3.1,3.3)将所述探测单元(2)挤压到所述参考元件(4,4.1)处;
- 通过使承载所述探测单元(2)的装配辅助件(3,3.1,3.3)绕所述参考元件(4,4.1)的旋转轴线(D)摆动,调整所述探测单元(2);
- 在已调整的旋转位置中位置固定地将所述探测单元(2)固定在所述对象(5)处;
- 从所述探测单元(2)上移除所述装配辅助件(3,3.1,3.3)。
11.根据权利要求10所述的用于将位置测量设备的探测单元(2)装配在对象(5)处的方法,其特征在于,通过将所述参考元件(4,4.1)安置在所述对象(5)处,提供所述参考元件(4)。
12.根据权利要求10所述的用于将位置测量设备的探测单元(2)装配在对象(5)处的方法,其特征在于,通过将所述参考元件(4.1)安置在对象(7)处提供所述参考元件(4.1),在位置测量时由所述探测单元(2)探测的标尺(1)布置在该对象处。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014213955.4 | 2014-07-17 | ||
| DE102014213955.4A DE102014213955A1 (de) | 2014-07-17 | 2014-07-17 | Vorrichtung mit einer Abtasteinheit und einer Montagehilfe und Verfahren zur Montage der Abtasteinheit |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN105277084A CN105277084A (zh) | 2016-01-27 |
| CN105277084B true CN105277084B (zh) | 2020-01-17 |
Family
ID=53051746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510421327.0A Active CN105277084B (zh) | 2014-07-17 | 2015-07-17 | 带有探测单元和装配辅助件的装置及装配探测单元的方法 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP2975357B1 (zh) |
| JP (1) | JP6271474B2 (zh) |
| CN (1) | CN105277084B (zh) |
| DE (1) | DE102014213955A1 (zh) |
| ES (1) | ES2643832T3 (zh) |
| SG (1) | SG10201504669QA (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3647739B1 (de) * | 2018-10-31 | 2020-12-16 | Dr. Johannes Heidenhain GmbH | Abtasteinheit einer positionsmesseinrichtung |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4115925A (en) * | 1977-05-16 | 1978-09-26 | Malak Stephen P | Shaft aligner |
| DE3542042C1 (de) * | 1985-11-28 | 1987-01-02 | Daimler Benz Ag | Faseroptischer Sensor zur Erfassung der Bewegung oder Position eines Bauteils |
| SE455536B (sv) * | 1986-12-02 | 1988-07-18 | Leine & Linde Ab | Forfarande och anordning for overforing av justerat lege fran justerfixtur till yttre drivenhet for en vinkelmetanordning |
| EP0369570A1 (en) * | 1988-11-16 | 1990-05-23 | Intel Gasgards Private Limited | Improvements in and relating to sensors |
| DE3915679A1 (de) * | 1989-05-13 | 1990-11-15 | Heidenhain Gmbh Dr Johannes | Positionsmesseinrichtung mit einer justiervorrichtung |
| JPH10197802A (ja) * | 1997-01-10 | 1998-07-31 | Nikon Corp | ステ−ジ |
| GB2350429B (en) * | 1999-05-28 | 2003-11-12 | Taylor Hobson Ltd | A metrological instrument |
| DE19949044B4 (de) * | 1999-10-11 | 2004-05-27 | Leica Microsystems Wetzlar Gmbh | Vorrichtung zur Feinfokussierung eines Objektives in einem optischen Sytstem und Koordinaten-Messgerät mit einer Vorrichtung zur Feinfokussierung eines Objektivs |
| JP3887188B2 (ja) * | 2001-08-08 | 2007-02-28 | 株式会社ミツトヨ | プローブのアライメント調整装置、その装置を備えた測定機およびプローブのアライメント調整方法 |
| JP4005472B2 (ja) * | 2002-10-10 | 2007-11-07 | ソニーマニュファクチュアリングシステムズ株式会社 | 位置検出装置 |
| JP2007127530A (ja) * | 2005-11-04 | 2007-05-24 | Fuji Electric Fa Components & Systems Co Ltd | 光学式リニアエンコーダの組立調整システム及び調整方法 |
| DE102010030948A1 (de) * | 2010-07-05 | 2012-01-05 | Dr. Johannes Heidenhain Gmbh | Positionsmesssystem und Verfahren zur Montage |
| DE102010052503B4 (de) * | 2010-11-26 | 2012-06-21 | Wenzel Scantec Gmbh | Verfahren zur Steuerung eines Koordinatenmessgeräts sowie Koordinatenmessgerät |
| TWI482923B (zh) * | 2012-10-05 | 2015-05-01 | Aopen Inc | 定位裝置及定位方法 |
-
2014
- 2014-07-17 DE DE102014213955.4A patent/DE102014213955A1/de not_active Withdrawn
-
2015
- 2015-05-08 EP EP15166912.4A patent/EP2975357B1/de active Active
- 2015-05-08 ES ES15166912.4T patent/ES2643832T3/es active Active
- 2015-06-12 SG SG10201504669QA patent/SG10201504669QA/en unknown
- 2015-07-07 JP JP2015136011A patent/JP6271474B2/ja active Active
- 2015-07-17 CN CN201510421327.0A patent/CN105277084B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| ES2643832T3 (es) | 2017-11-24 |
| SG10201504669QA (en) | 2016-02-26 |
| JP6271474B2 (ja) | 2018-01-31 |
| EP2975357A3 (de) | 2016-01-27 |
| EP2975357A2 (de) | 2016-01-20 |
| DE102014213955A1 (de) | 2016-01-21 |
| JP2016024189A (ja) | 2016-02-08 |
| CN105277084A (zh) | 2016-01-27 |
| EP2975357B1 (de) | 2017-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107791264B (zh) | 操作设备和用于监控操作过程的方法 | |
| US10760891B2 (en) | Surface measuring apparatus | |
| JP2014046399A (ja) | パラレルリンクロボット | |
| JP6792710B2 (ja) | 2つの誘導性センサーによって作動を検出する回転型制御ステムを有する携行可能な物 | |
| WO1999047883A2 (en) | Head, apparatus and method for the linear dimension checking of mechanical pieces | |
| US10962344B2 (en) | Measuring jig, measuring device, and gap measuring method | |
| JP6632333B2 (ja) | 回転角度検出装置およびこれに用いる角度センサユニット | |
| CN105277084B (zh) | 带有探测单元和装配辅助件的装置及装配探测单元的方法 | |
| JP2007127530A (ja) | 光学式リニアエンコーダの組立調整システム及び調整方法 | |
| JP3409033B2 (ja) | 位置測定装置の組立て方法及び組立てのための位置決め手段 | |
| JP2018091835A (ja) | 磁気誘導を測定して作動を検出する回転制御ステムを含む携帯品 | |
| KR20000050378A (ko) | 다축기계의 3차원입체오차 측정장치 | |
| JP4896062B2 (ja) | 非接触式変位センサ用冶具 | |
| US7500320B2 (en) | Position measuring arrangement and procedure for the assembly of a position measuring arrangement | |
| KR20220137714A (ko) | 자석 고정구 | |
| JP2015219041A (ja) | 手動パルス発生装置 | |
| JP6752598B2 (ja) | 光学スケールを有する測長器およびタッチ・プローブ | |
| EP3123107B1 (en) | Apparatus for checking dimensions and shape of a mechanical piece | |
| CN115128522A (zh) | 一种霍尔探头的封装结构、检测设备及封装精度管控方法 | |
| JP4693122B2 (ja) | シリンダのストローク位置計測装置 | |
| CN209798090U (zh) | 校准工装和校准系统 | |
| US11821724B2 (en) | Digital micrometer | |
| JP7440258B2 (ja) | アブソリュートエンコーダ | |
| JP2010249602A (ja) | リニアエンコーダおよびエンコーダヘッドの交換方法 | |
| JP6333970B2 (ja) | 機械部品の寸法及び/又は形状を測定する機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |