CN102849009A - 一种高速公路追尾碰撞预警及防护系统及控制方法 - Google Patents
一种高速公路追尾碰撞预警及防护系统及控制方法 Download PDFInfo
- Publication number
- CN102849009A CN102849009A CN2012103358974A CN201210335897A CN102849009A CN 102849009 A CN102849009 A CN 102849009A CN 2012103358974 A CN2012103358974 A CN 2012103358974A CN 201210335897 A CN201210335897 A CN 201210335897A CN 102849009 A CN102849009 A CN 102849009A
- Authority
- CN
- China
- Prior art keywords
- micro controller
- early warning
- controller system
- road surface
- car
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
























Claims (6)









Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210335897.4A CN102849009B (zh) | 2012-09-12 | 2012-09-12 | 一种高速公路追尾碰撞预警及防护系统及控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210335897.4A CN102849009B (zh) | 2012-09-12 | 2012-09-12 | 一种高速公路追尾碰撞预警及防护系统及控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102849009A true CN102849009A (zh) | 2013-01-02 |
| CN102849009B CN102849009B (zh) | 2016-01-20 |
Family
ID=47396120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210335897.4A Active CN102849009B (zh) | 2012-09-12 | 2012-09-12 | 一种高速公路追尾碰撞预警及防护系统及控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102849009B (zh) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103481850A (zh) * | 2013-09-25 | 2014-01-01 | 东风汽车公司 | 碰撞前紧急制动干预系统和方法 |
| CN103723107A (zh) * | 2014-01-08 | 2014-04-16 | 曹小兵 | 一种两轮车辆智能防撞系统及其控制方法 |
| CN103818313A (zh) * | 2014-03-05 | 2014-05-28 | 山西大学 | 一种用于汽车防追尾装置的动态预警方法 |
| CN104097597A (zh) * | 2014-06-29 | 2014-10-15 | 李宝 | 车载除雪抛洒器安全预警装置 |
| CN104924974A (zh) * | 2015-06-09 | 2015-09-23 | 成都衔石科技有限公司 | 避免汽车追尾的机构 |
| CN105253043A (zh) * | 2015-10-22 | 2016-01-20 | 成都易默生汽车技术有限公司 | 一种主动头枕的使用方法 |
| CN105730442A (zh) * | 2016-02-02 | 2016-07-06 | 湖南大学 | 一种汽车防追尾碰撞系统、方法及单片机 |
| CN105774807A (zh) * | 2016-03-04 | 2016-07-20 | 苏黎 | 一种汽车速度的控制方法及汽车 |
| CN106904143A (zh) * | 2015-12-23 | 2017-06-30 | 上海汽车集团股份有限公司 | 一种行人和乘客的保护方法、系统及控制器 |
| CN108407719A (zh) * | 2018-04-20 | 2018-08-17 | 长安大学 | 一种避免车辆发生二次碰撞的预警装置及方法 |
| CN109050538A (zh) * | 2018-06-20 | 2018-12-21 | 湘潭大学 | 一种安全车距估算装置及方法 |
| CN109532601A (zh) * | 2018-10-16 | 2019-03-29 | 江苏敏安电动汽车有限公司 | 汽车座椅头枕后碰防护系统及汽车 |
| CN110077310A (zh) * | 2014-05-13 | 2019-08-02 | 伟摩有限责任公司 | 用于吸收力的装置 |
| CN110503824A (zh) * | 2019-07-31 | 2019-11-26 | 贵州省交通规划勘察设计研究院股份有限公司 | 一种行车安全辅助驾驶方法及系统 |
| CN110871733A (zh) * | 2018-08-29 | 2020-03-10 | 长城汽车股份有限公司 | 车辆制动灯控制方法、装置、系统及其可读存储介质 |
| CN111619579A (zh) * | 2019-02-27 | 2020-09-04 | 罗伯特·博世有限公司 | 用于控制电子的稳定系统的方法 |
| CN111923858A (zh) * | 2020-07-10 | 2020-11-13 | 江苏大学 | 一种基于地面投影的汽车防碰撞预警装置及方法 |
| CN112092722A (zh) * | 2020-08-31 | 2020-12-18 | 江苏大学 | 一种基于车载雷达的分级点亮式制动示警尾灯 |
| CN112721846A (zh) * | 2020-04-07 | 2021-04-30 | 西华大学 | 安全的电动轿车追尾时前保险杠主动保护方法 |
| CN114973669A (zh) * | 2022-05-23 | 2022-08-30 | 江苏智行未来汽车研究院有限公司 | 基于车路协同的公路危险环境预警方法、装置及介质 |
| CN118494333A (zh) * | 2024-07-18 | 2024-08-16 | 深圳市蓝鲸智联科技股份有限公司 | 一种车辆制动灯控制方法、装置、系统及其可读存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070142996A1 (en) * | 2005-12-17 | 2007-06-21 | Chankyu Lee | Adaptive cruise control system and method for vehicle |
| CN101016053A (zh) * | 2007-01-25 | 2007-08-15 | 吉林大学 | 高等级公路上车辆防追尾碰撞预警方法和系统 |
| CN101488290A (zh) * | 2009-02-27 | 2009-07-22 | 清华大学 | 一种防后车追尾预警方法及其预警系统 |
| KR101054759B1 (ko) * | 2004-09-30 | 2011-08-05 | 현대자동차주식회사 | 후방추돌 예보를 위한 능동 헤드레스트 장치 및 그 제어방법 |
| CN202400085U (zh) * | 2011-12-20 | 2012-08-29 | 河南科技大学 | 一种汽车防追尾系统 |
| CN202987041U (zh) * | 2012-09-12 | 2013-06-12 | 江苏大学 | 一种高速公路追尾碰撞预警及防护系统 |
-
2012
- 2012-09-12 CN CN201210335897.4A patent/CN102849009B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101054759B1 (ko) * | 2004-09-30 | 2011-08-05 | 현대자동차주식회사 | 후방추돌 예보를 위한 능동 헤드레스트 장치 및 그 제어방법 |
| US20070142996A1 (en) * | 2005-12-17 | 2007-06-21 | Chankyu Lee | Adaptive cruise control system and method for vehicle |
| CN101016053A (zh) * | 2007-01-25 | 2007-08-15 | 吉林大学 | 高等级公路上车辆防追尾碰撞预警方法和系统 |
| CN101488290A (zh) * | 2009-02-27 | 2009-07-22 | 清华大学 | 一种防后车追尾预警方法及其预警系统 |
| CN202400085U (zh) * | 2011-12-20 | 2012-08-29 | 河南科技大学 | 一种汽车防追尾系统 |
| CN202987041U (zh) * | 2012-09-12 | 2013-06-12 | 江苏大学 | 一种高速公路追尾碰撞预警及防护系统 |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103481850A (zh) * | 2013-09-25 | 2014-01-01 | 东风汽车公司 | 碰撞前紧急制动干预系统和方法 |
| CN103723107A (zh) * | 2014-01-08 | 2014-04-16 | 曹小兵 | 一种两轮车辆智能防撞系统及其控制方法 |
| CN103818313A (zh) * | 2014-03-05 | 2014-05-28 | 山西大学 | 一种用于汽车防追尾装置的动态预警方法 |
| CN110077310A (zh) * | 2014-05-13 | 2019-08-02 | 伟摩有限责任公司 | 用于吸收力的装置 |
| CN110077310B (zh) * | 2014-05-13 | 2022-12-13 | 伟摩有限责任公司 | 用于吸收力的装置 |
| CN104097597A (zh) * | 2014-06-29 | 2014-10-15 | 李宝 | 车载除雪抛洒器安全预警装置 |
| CN104924974A (zh) * | 2015-06-09 | 2015-09-23 | 成都衔石科技有限公司 | 避免汽车追尾的机构 |
| CN105253043A (zh) * | 2015-10-22 | 2016-01-20 | 成都易默生汽车技术有限公司 | 一种主动头枕的使用方法 |
| CN106904143A (zh) * | 2015-12-23 | 2017-06-30 | 上海汽车集团股份有限公司 | 一种行人和乘客的保护方法、系统及控制器 |
| CN106904143B (zh) * | 2015-12-23 | 2020-05-01 | 上海汽车集团股份有限公司 | 一种行人和乘客的保护方法、系统及控制器 |
| CN105730442A (zh) * | 2016-02-02 | 2016-07-06 | 湖南大学 | 一种汽车防追尾碰撞系统、方法及单片机 |
| CN105774807A (zh) * | 2016-03-04 | 2016-07-20 | 苏黎 | 一种汽车速度的控制方法及汽车 |
| CN108407719A (zh) * | 2018-04-20 | 2018-08-17 | 长安大学 | 一种避免车辆发生二次碰撞的预警装置及方法 |
| CN109050538A (zh) * | 2018-06-20 | 2018-12-21 | 湘潭大学 | 一种安全车距估算装置及方法 |
| CN110871733A (zh) * | 2018-08-29 | 2020-03-10 | 长城汽车股份有限公司 | 车辆制动灯控制方法、装置、系统及其可读存储介质 |
| CN109532601B (zh) * | 2018-10-16 | 2023-12-22 | 江苏敏安电动汽车有限公司 | 汽车座椅头枕后碰防护系统及汽车 |
| CN109532601A (zh) * | 2018-10-16 | 2019-03-29 | 江苏敏安电动汽车有限公司 | 汽车座椅头枕后碰防护系统及汽车 |
| CN111619579A (zh) * | 2019-02-27 | 2020-09-04 | 罗伯特·博世有限公司 | 用于控制电子的稳定系统的方法 |
| CN111619579B (zh) * | 2019-02-27 | 2024-05-14 | 罗伯特·博世有限公司 | 用于控制电子的稳定系统的方法 |
| CN110503824A (zh) * | 2019-07-31 | 2019-11-26 | 贵州省交通规划勘察设计研究院股份有限公司 | 一种行车安全辅助驾驶方法及系统 |
| CN112721846A (zh) * | 2020-04-07 | 2021-04-30 | 西华大学 | 安全的电动轿车追尾时前保险杠主动保护方法 |
| CN112721846B (zh) * | 2020-04-07 | 2022-11-08 | 西华大学 | 安全的电动轿车追尾时前保险杠主动保护方法 |
| CN111923858A (zh) * | 2020-07-10 | 2020-11-13 | 江苏大学 | 一种基于地面投影的汽车防碰撞预警装置及方法 |
| CN112092722A (zh) * | 2020-08-31 | 2020-12-18 | 江苏大学 | 一种基于车载雷达的分级点亮式制动示警尾灯 |
| CN114973669A (zh) * | 2022-05-23 | 2022-08-30 | 江苏智行未来汽车研究院有限公司 | 基于车路协同的公路危险环境预警方法、装置及介质 |
| CN114973669B (zh) * | 2022-05-23 | 2023-09-26 | 江苏智行未来汽车研究院有限公司 | 基于车路协同的公路危险环境预警方法、装置及介质 |
| CN118494333A (zh) * | 2024-07-18 | 2024-08-16 | 深圳市蓝鲸智联科技股份有限公司 | 一种车辆制动灯控制方法、装置、系统及其可读存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102849009B (zh) | 2016-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
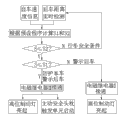
| CN102849009B (zh) | 一种高速公路追尾碰撞预警及防护系统及控制方法 | |
| CN202987041U (zh) | 一种高速公路追尾碰撞预警及防护系统 | |
| CN102745194B (zh) | 一种高速公路汽车防追尾前车的自适应报警方法 | |
| CN102774378B (zh) | 车辆追尾预警及保护方法、系统 | |
| CN103350670B (zh) | 一种基于车联网技术的车辆前向防撞报警方法 | |
| CN104627069A (zh) | 一种车辆防追尾系统及其方法 | |
| CN202243308U (zh) | 一种车辆防追尾装置 | |
| CN204432641U (zh) | 基于机器视觉的车辆前向防撞自动紧急制动系统及该车辆 | |
| CN107344552A (zh) | 动态监测全方位汽车防撞预警系统 | |
| CN105984447A (zh) | 基于机器视觉的车辆前向防撞自动紧急制动系统及方法 | |
| CN104494550A (zh) | 一种车辆主动避撞装置及避撞距离的计算方法 | |
| CN103978927A (zh) | 一种基于前向防撞系统的汽车刹车尾灯自动控制系统 | |
| CN203332106U (zh) | 基于单目视觉的汽车预警防撞系统 | |
| CN103448720B (zh) | 汽车爆胎防追尾控制方法及控制装置 | |
| CN202243165U (zh) | 车辆碰撞报警装置 | |
| CN104751677A (zh) | 车辆碰撞报警方法和系统 | |
| CN107618508A (zh) | 一种车辆智能刹车系统及其工作方法 | |
| CN207106492U (zh) | 动态监测全方位汽车防撞预警系统 | |
| CN102336190B (zh) | 汽车防侧翻保护控制方法及装置 | |
| CN209028836U (zh) | 一种对低速行驶车辆的主动警示系统 | |
| CN105128739A (zh) | 车辆智能避险系统和方法 | |
| CN203211284U (zh) | 一种汽车防追尾装置 | |
| CN202935330U (zh) | 智能安全制动系统 | |
| CN102476620A (zh) | 车辆主动防碰撞的智能化告警装置 | |
| CN206938592U (zh) | 一种具有主动刹车及安全尾灯的汽车控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20171211 Address after: 212005 South Xu Road, Zhenjiang, Zhenjiang, Jiangsu Patentee after: JIANGSU HUIZHI INTELLECTUAL PROPERTY SERVICES Co.,Ltd. Address before: Zhenjiang City, Jiangsu Province, 212013 Jingkou District Road No. 301 Patentee before: Jiangsu University |
|
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20191031 Address after: 315000 room 242, floor 2, No. 800, Chuangyuan Road, Ningbo high tech Zone, Zhejiang Province Co-patentee after: ZHEJIANG HIGHWAY INFORMATION ENGINEERING TECHNOLOGY CO.,LTD. Patentee after: AVIC anzhen (Zhejiang) Information Technology Co.,Ltd. Address before: 315000 209-338, No. 10, Gui'an Road, Guisi street, Ningbo New Material Technology City, Zhejiang Province Patentee before: Zhejiang powerful Weizhi Intellectual Property Operation Co.,Ltd. Effective date of registration: 20191031 Address after: 315000 209-338, No. 10, Gui'an Road, Guisi street, Ningbo New Material Technology City, Zhejiang Province Patentee after: Zhejiang powerful Weizhi Intellectual Property Operation Co.,Ltd. Address before: 212005 South Xu Road, Zhenjiang, Zhenjiang, Jiangsu Patentee before: JIANGSU HUIZHI INTELLECTUAL PROPERTY SERVICES Co.,Ltd. |
|
| TR01 | Transfer of patent right |