CN100334422C - 干涉测位仪 - Google Patents
干涉测位仪 Download PDFInfo
- Publication number
- CN100334422C CN100334422C CNB031274501A CN03127450A CN100334422C CN 100334422 C CN100334422 C CN 100334422C CN B031274501 A CNB031274501 A CN B031274501A CN 03127450 A CN03127450 A CN 03127450A CN 100334422 C CN100334422 C CN 100334422C
- Authority
- CN
- China
- Prior art keywords
- grating
- raster
- divided beams
- position measuring
- cycle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims abstract description 53
- 230000003287 optical effect Effects 0.000 claims abstract description 35
- 230000010363 phase shift Effects 0.000 claims abstract description 26
- 230000000644 propagated effect Effects 0.000 claims abstract description 11
- 238000005259 measurement Methods 0.000 claims abstract description 10
- 238000000354 decomposition reaction Methods 0.000 claims description 21
- 239000004065 semiconductor Substances 0.000 claims description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims 2
- 238000000034 method Methods 0.000 abstract description 6
- 230000000737 periodic effect Effects 0.000 abstract description 6
- 238000007493 shaping process Methods 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/36—Forming the light into pulses
- G01D5/38—Forming the light into pulses by diffraction gratings
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optical Transform (AREA)
Abstract
提出一种包括光源的干涉测位仪,光源沿光轴方向发出光束。在光源后面的光学元件转换来自光源的光束。在转换光束区内安置一标度光栅,它将入射光束至少分解成第一和第二分光束,分光束沿不同空间方向传播。在第一和第二分光束的光路中,各安置一扫描光栅,它们又将第一和第二分光束分解成第三和第四以及第五和第六分光束,至少其中两个分光束再次相遇。在同第一目标相连的标度光栅相对同第二目标相连的光源和扫描光栅移动时,在检波平面中得到周期性调制的并有规定的空间干涉条纹图形-周期(P1F)的干涉条纹图形。为检测相移的扫描信号,例如可利用安置在检波平面中的检波光栅和多个光电子检波器件,或利用安置在检波平面中的周期性检波器装置。
Description
技术领域
本发明涉及干涉测位仪。
背景技术
干涉测位仪众所周知地被用于精确测量位置,这些干涉测位仪利用光栅衍射现象产生高分辨率的且与位置相关的扫描信号。当标度光栅相对一个扫描单元移动时,就会在带有偏转衍射级的分光束中产生相移,这些相移与光路变化成比例。为了计算或掌握当时的相移,将不同的分解分光束或衍射级叠加并形成干涉。在移动的情况下,得到干涉条纹图形的周期性调制,利用一个合适的光电子检波器,便可掌握这种调制。关于这种干涉测位仪的情况,建议参考1978年出版的J.Willhelm的博士论文《Dreigitterschrittgeber》第4章,47-52页。
US 6,005,667的图13公开了干涉测位仪的另一变型方案。由光源发出的光束在经过透镜成束之后射入一个标度光栅,该标度光栅安置在已变换的光束的光腰区域内。入射光束被标度光栅分解成+/-1衍射级或被分解成相应的分光束,这些分光束传播离开光轴。这些分光束随即到达其它衍射扫描光栅,这些光栅使入射分光束偏转返射向光轴。在分光束在其中发生干涉的检波平面中,安置一个检波光栅,该检波光栅具有四个相移分区,以便在后续的检波元件上产生四个各自相位移了90°的扫描信号。
在这方面,还可补充参考美国专利US 5,574,558,它公开了另一种干涉测位仪。
事实证明,在这种高分辨率的测位仪中,对装配允许公差的要求原则上是很关键的。就是说,装配允许公差通常很小,而这又造成安装和校准起来很费事。为此,要求一种尽可能小的构造系统,特别是要求尽可能小地构造的扫描单元以及要求尽可能不容易被污染。原则上讲,在这种测位仪中,总扫描信号有尽可能优良的质量是重要的,特别是当规定进行电子再处理如扫描信号的内插时。但是,上述文献所公开的干涉测位仪都没有以令人满意的方式方法满足所有提出的要求。
因此,由US 6,005,667公开的系统虽然对标度光栅和扫描单元的失调不太敏感,但却和以前一样容易出现标度光栅污染。
事实表明,US 5,574,558所述装置的缺点就是,该装置对在两个可相对移动的光栅之间的距离的波动很敏感,就是说,特别是在这个方向上,只有很小的装配允许公差。这是由射入第一光栅的发散的或非准直的衍射光束造成的。
发明内容
因此,本发明的任务是提供一种高分辨率的干涉测位仪,它具有大的装配允许公差并尽可能不易污染,而且可实现紧凑结构。
为此,本发明提供一种干涉测位仪,它用于测定至少在一个测量方向(X)上相对移动的两个目标的相对位置并且它包括:
-一个光源,它沿一光轴的方向发出一个光束,
-一个安置在光源后面的光学元件,其转换来自光源的光束,
-一个安置在光源后面的标度光栅,该标度光栅将入射光束至少分解成一个第一分光束和一个第二分光束(+1)、(-1),这两个分光束沿不同的空间方向传播,
-分别安置在第一和第二分光束(+1)、(-1)的光路中的每一个扫描光栅,其中每个扫描光栅又将第一和第二分光束(+1)、(-1)分解为第三和第四分光束以及第五和第六分光束,其中至少有两个分光束(+1,-1)、(-1,+1)再次相遇;其中在同第一目标相连的标度光栅相对同第二目标相连的光源和扫描光栅相对移动的情况下,在一个检波平面中得到一个周期性调制的并有一个规定的空间干涉条纹图形-周期的干涉条纹图形,
-一个安置在该检波平面中的检波光栅,该检波光栅将透过检波光栅的光沿至少三个不同的空间方向加以分解,
-设置在所述的至少三个空间方向上的光电子检波器件,它们用于获取相移的扫描信号,
所述第一和第二扫描光栅被共同安置在一个扫描板上,所述扫描板在设有所述第一和第二扫描光栅的区域外被设计成是不透光的,因此,只有来自标度光栅的按照+1/-1级的部分光束有助于信号产生。
本发明还提供一种干涉测位仪,它用于测定至少沿一个测量方向相对移动的两个目标的相对位置并且它包括:
-一个光源,它沿一光轴的方向发出一个光束,
-一个安置在光源后面的光学元件,它转换来自光源的光束,
-一个安置在光源后面的标度光栅,该光栅将入射光束至少分解成一个第一分光束和一个第二分光束(+1)、(-1),这两个分光束沿不同的空间方向传播,
-分别安置在第一和第二分光束(+1)、(-1)的光路中的每一个扫描光栅,其中每个扫描光栅又将第一和第二分光束(+1)、(-1)分解成第三和第四分光束以及第五和第六分光束,其中至少有两个分光束(+1,-1)、(-1、+1)再次相遇;在同第一目标相连的标度光栅相对同第二目标相连的光源和扫描光栅相对移动的情况下,在一个检波平面中得到一个周期性调制的并有一规定的空间干涉条纹图形-周期的干涉条纹图形,
-一个安置在检波平面中的周期性检波器装置,它用于获得相移的扫描信号,该装置包括多个单独的检波器件,其中检波器-周期与空间干涉条纹图形-周期是谐调的,
第一和第二扫描光栅被共同安置在一个扫描板上,所述扫描板在设有所述第一和第二扫描光栅的区域外被设计成是不透光的,因此,只有来自标度光栅的按照+1/-1级的部分光束有助于信号产生。
作为根据本发明解决方案的优点,首先应提出的是,特别是在设计成旋转式测位仪的情况下,获得了与带有标度光栅的分度盘的位置有关的大装配允许公差。不仅在径向或切向上,而且在轴向上,都存在大的装配允许公差。因此,测位仪安装起来不费事。
此外,通过本发明的干涉测位仪产生的扫描信号具有较少的不希望有的高次谐波,也就是说,存在着高质量的扫描信号。因此,可以在电子信号进一步处理中减小测量误差。
还要指出的是,在本发明提出的考虑的基础上,可以实现结构紧凑的总系统,所述系统即使在有限的安装条件下也可使用。
由于实现了所谓的单场扫描,所以满足了对污染不敏感性的要求。这意味着,万一标度光栅受污染,总是所有产生的相移的扫描信号受到一样的影响,因而,在信号进一步处理时不会出现大的误差。
本发明的干涉测位仪当然既可被设计成旋转式的,也可被设计成直线式的。此外,基于本发明的考虑,除了透光系统外,还能实现反射光系统。
根据本发明,所述光源可以被设计为半导体光源。此外,所述光学元件被设计为透镜形式。所述标度光栅优选被设计为相位衍射光栅,被分解的所述第一和第二分光束(+1)、(-1)对应于+/-1衍射级。所述标度光栅被设计为具有栅格比ηMG=1∶1和相移MG=180°的相位衍射光栅。另外,所述扫描光栅最好被设计成相位衍射光栅,被分解的所述第三和第四分光束及所述第五和第六分光束分别对应于+1/-1衍射级。所述扫描光栅优选被设计为具有栅格比ηAG=1∶1和相移AG=180°的相位衍射光栅,它们各自具有一个扫描光栅-分解周期(TPAG),该周期小于标度光栅-分解周期。所述扫描光栅优选被布置成与标度光栅有一段距离a1,其中由所述标度光栅分解的第一和第二分光束(+1)、(-1)在空间上彼此分开地存在着。
在这里,下式适用于在所述标度光栅和所述扫描光栅之间的距离a1和在所述扫描光栅和所述检波平面之间的距离a2
在式中,a1:=在所述标度光栅和所述扫描光栅之间的距离,
a2:=在所述扫描光栅和所述检波平面之间的距离,
TPMG:=标度光栅-分解周期,
PIF:=检波平面中的空间干涉条纹图形-周期,
λ:=光源波长。
在这里,下式适用于所述扫描光栅-分解周期
TPAG=1/(1/TPMG+1/2 PIF)
式中,TPAG:=扫描光栅-分解周期。
在本发明的干涉测位仪中,所述标度光栅被安置在由所述光学元件转换的光束的光腰区域内。所述检波光栅最好被设计为相位衍射光栅,所述检波光栅将入射光至少分解成0衍射级及+/-2衍射级。所述检波光栅可以被设计为具有栅格比ηDG=1∶2或ηDG=2∶1和相移120°或240°的相位衍射光栅,而且具有一个检波光栅-分解周期,该分解周期相当于空间干涉条纹图形-周期的两倍。
此外,检波器-周期如此与空间干涉条纹图形-周期相互谐调,即相邻的检波器件提供了各自相位移90°的扫描信号。在一个空间的干涉条纹图形-周期内,优选设有四个检波器件。
另外,提供同相的扫描信号的检波器件分别导电相连。
附图说明
从以下参照附图对一些实施例所做的说明中,得到了本发明的其它优点及细节。附图表示:
图1示意表示本发明干涉测位仪的第一实施形式的展开扫描光路;
图2示意表示从光源至标度光栅的光路;
图3是带有图1所示扫描光路的本发明干涉测位仪的旋转式实施形式的局部立体示意图;
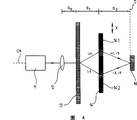
图4示意表示本发明干涉测位仪的第二变型方案的扫描光路;
图5结合为此被扫过的干涉条纹图形地示意表示图4所示测位仪的检波器装置;
图6是带有图4所示扫描光路的本发明干涉测位仪的旋转式实施形式的局部立体示意图。
具体实施方式
首先,参见图1-3对本发明测位仪的第一变型方案加以说明。图1在此示意示出了测位仪的展开扫描光路。测位仪用于高精度地测定两个目标的相对位置,这两个目标在至少一个测量方向上相对移动。在图1所示的示意性原理图中,用箭头表示沿标度光栅3的测量方向X相对其余元件1、2、4、5、6的直线移动,这些元件均安装在一个扫描单元内。为此,标度光栅3与两个目标中的一个相连,至少一个光源1和扫描板4的扫描光栅4.1、4.2同其中的另一个目标相连。如结合以下说明可看到的,代替直线测量方向,当大致有两个目标相对绕一旋转轴线旋转并且要测定这两个目标的与旋转轴线有关的转角相对位置时,当然也可以规定旋转测量方向,
以下,参照图1来说明用于产生与移动有关的扫描信号的基本扫描光路。
从光源1如成激光器二极管或所谓的VCSEL(垂直腔表面发射激光器)形式的半导体光源中发出一个光束,该光束沿光轴OA方向传播。发出的光束主要最好是由作为光源1的VCSEL所发出的高斯射线的TEMOO波型(横向电磁波型)。由光源1发出的光束因VCSEL发射特性而有一定的发散度并且利用一个光学元件2加以变换,该光学元件在光束传播方向上被安置在光源1的后面;在这个例子中,作为光学元件2地设有单个透镜。或者,为了光束变换,也可以考虑使用更复杂的透镜系统、反射镜系统、夫累内尔(Fresnel)透镜、GRIN-透镜(图像输入透镜),等等。
所发出的发散光束的光束变换最好如此进行,即在光学元件2之后存在一个近似准直的光束,该光束在离光学元件2的一定距离a0处有一个光腰。在本文中,光腰是指沿光束传播方向的光束横断面的这样一个点,在该点上,光束具有最小面积或最小横向扩展。为清楚说明起见,在此还可补充参见图2,该图表示光束变换前后的光束形状。如从图2和图1中看到的,在光腰区域内,在离光学元件2间隔距离a0地设有一个标度光栅3,经过变换的光束射入该光栅。标度光栅3安置在这个位置上的优点在于,由此增大了在径向或切向上以及在光束传播方向上即轴向上的装配允许公差。为在此方向上获得大的装配允许公差,原则上力求用具有微小发散度和小光束直径的光束来照射标度光栅3。由于在预定波长的条件下无法将这些参数随意减到最小值,所以,必须为最佳安置标度光栅3寻找折中方案。一个折中方案就是,将标度光栅安置在所发出的或所变换的光束的光腰中,在这里,高斯射线的TEMOO波型的发散度和光束直径的乘积具有最小值。
标度光栅3造成入射光束被分解成第一和第二分光束(+1)、(-1),这两个分光束沿不同的空间方向传播,在这个例子中,就是偏离开光轴OA。在本发明测位仪的一个具体实施例中,标度光栅3被设计成相位衍射光栅,就是说,第一和第二分光束(+1)、(-1)对应于在各自空间方向上偏转的+1/-1衍射级。在一个优选实施形式中,成相位衍射光栅形式的标度光栅3具有栅格比(栅条-间隙比)ηMG=1∶1及相移MG=180°。
在图1-图3所示例子中,标度光栅3成透射光栅形式,原则上讲,另一个替代方式也是可行的,即如果总系统在反射光中工作,则标度光栅3成反射的反射光光栅的形式。
在标度光栅3将入射光束分解后,第一和第二分光束(+1)、(-1)随即在光束传播过程中分别射入一扫描光栅4.1、4.2,该扫描光栅安置在各自的分光路中。这两个扫描光栅4.1、4.2共同安置在一个扫描板4上。扫描板4在扫描光栅4.1、4.2之外的区域里被设计成是不透光的,这在图1中通过在扫描板4侧面上的深色图示区来表示。通过这样的方式方法,保证了只有偏离开标度光栅3的分光束(+1)、(-1)的各自+1/-1衍射级有助于信号产生。在这种情况下,在此仅仅指的是+1/-1衍射级。
通过扫描光栅4.1、4.2,又分别对入射其中的第一和第二分光束(+1)、(-1)进行分光。第一分光束(+1)被扫描光栅4.1至少分成一个第三分光束和一个第四分光束;第二分光束(-1)经过扫描光栅4.2被至少分成一个第五分光束和一个第六分光束。在所产生的至少四个被分开的分光束中,至少有两个分光束(+1,-1)、(-1,+1)再次相遇或相交,因为它们在这个例子中再次朝向光轴OA传播,而其余分光束沿另外的空间方向传播,而且不再有助于信号产生。如图1所示,在扫描光栅4.1、4.2之后,只示出两个分光束(+1,-1)、(-1,+1),它们再次相遇,然后可用于产生与位移相关的扫描信号。
在一个优选的实施形式中,也可将扫描光栅4.1、4.2设计成相位衍射光栅,就是说,由这两个扫描光栅4.1、4.2分解的第三和第四及第五和第六分光束对应于+/-1衍射级。除了用于产生信号的分光束(+1,-1)、(-1,+1)外,图1还分别示出了,这些分光束对应于在不同的光栅上的哪些衍射级。
用作扫描光栅4.1、4.2的相位衍射光栅具有栅格比ηAG=1∶1和相移AG=180°;此外,各自的扫描光栅-分解周期TPAG被选择成小于标度光栅-分解周期TPMG
在例如与标度光栅3相连的第一目标相对与光源1和扫描光栅4.1、4.2相连的第二目标相对移动的情况下,在一个检波平面D中,由于分光束(+1,-1)和(-1,+1)的重叠而得到一个周期性调制的并具有一个规定的空间干涉条纹图形-周期PIF的干涉条纹图形。从上述干涉条纹图形的合适检波中,可获得所希望的与位移相关的扫描信号。
在最后为了说明这个变型方案而对与位移相关的扫描信号的检波进行描述前,以下先就整个系统的其它有利设计原理进行探讨。
与之相关地,首先要提出的是用于适当选择距离a1或a2的第一参数选择原则。用a1表示在标度光栅3和扫描光栅4.1、4.2之间的距离;用a2表示在扫描光栅4.1、4.2和检波平面D之间的距离;关于各个不同的参数的定义,也还得参见图1。在本发明的测位仪的一个优选变型方式中,可依下列等式(1)选择距离a1和a2之比:
在这里,以下说明适用于所用参数:
a1:=在标度光栅和扫描光栅之间的距离,
a2:=在扫描光栅和检波平面之间的距离,
TPMG:=标度光栅-分解周期,
PIF:=检波平面中的空间干涉条纹图形-周期,
λ:=光源波长。
通过选择距离a1,可确保至少由标度光栅3分解的第一和第二分光束(+1)、(-1)在扫描光栅4.1、4.2的范围内在空间上处于彼此分开的状态。此外,通过这样选择距离a1,确保了在一定程度上只有+1/-1衍射级有助于信号产生,由此又只能产生受干扰很小的扫描信号,这些扫描信号特别是没有高次谐波部分。
另一个参数选择规定给出了与其它参数相关的扫描光栅-分解周期TPAG的值。最好按下列等式(2)选择扫描光栅-分解周期TPAG:
TPAG=1/(1/TPMG+1/2 PIF) 等式2
不同参数的含义仍可参照上面的等式(1)。
在检波侧,在本发明测位仪的上述第一变型方式规定,在检波平面D中安置一个检波光栅5,该光栅造成通过检波光栅5射入的光在至少三个不同的空间方向上被分解。在检波光栅5之后的距离a3处,在检波侧还设有至少三个光电子检波器元件6.1、6.2、6.3,这些光电子检波器元件的用途是,在检波平面D中,从干涉条纹图形扫描中获得或产生相移的扫描信号S0°、S120°、S240°。
与其它所用光栅一样,检波光栅5也成相位衍射光栅的形式,该光栅将入射光至少按三个衍射级或空间方向进行分解。一个优选的实施形式规定,分解成0衍射级、+/-1衍射级及+/-2衍射级。在图1中,沿三个检波元件6.1、6.2、6.3的方向传播的分光束通过在不同光栅上彼此互相干涉的衍射级的数据来表示。
检波光栅5的相应的相位衍射光栅最好具有栅格比ηDG=1∶2或ηDG=2∶1以及120°或240°的相移。此外,检波光栅5具有一个检波光栅-分解周期(TPDG),该周期相当于空间干涉条纹图形-周期(PIF)的两倍。此外,检波光栅5的合适设计可详见如EP446691B1所述的措施。
由于利用了在不同光栅上的衍射级,所以在标度光栅3和扫描单元相对移动的情况下,在三个检波器元件6.1、6.2、6.3上,分别产生相位差了120°的扫描信号S0°、S120°、S240°。这些扫描信号按已知方法并通过一个未示出的伺服电子装置被转换成一对扫描信号,这对扫描信号具有90°的相位差。
借助本发明干涉测位仪的上述变型方案,可获得特别小的构造形式并同时获得扫描信号的高调制级。这要归功于,参数a2可以选择得很小。再有就是,本系统的光学元件可以比较简单地适应于要求截然不同的光栅点阵常数和扫描距离。
在图3的局部空间示意图中,示出了从原则上结合图1而说明的系统的一个具体实施形式,该系统特别用来获取围绕一旋转轴线R的旋转相对运动。在这张图中,功能相同部分以与图1相同的附图标记来表示。
在旋转式变型方案的情况下,除了本发明测位仪的上述优点之外,特别有利的是:在径向、切向及轴向上,可获得标度光栅3或所谓的分度盘的大的装配允许公差。
本发明测位仪的另一变型方式将参见图4-6来说明。在这里,基本上只描述与上述的第一测位仪的主要不同之处。
就在相对运动情况下在检波平面D中产生周期性调制的干涉条纹图形而言,上述变型对应于上述的第一变型方式,就是说,经过光源11、光学元件12、标度光栅13及带有扫描光栅14.1、14.2的扫描板14可按上述方式方法在检波平面D中产生待检测的已经过周期性调制的干涉条纹图形。
在检波方面,与上述测位仪不同地规定了,在检波平面中设置一个周期性检波器装置16,经过该装置,掌握了经过周期性调制的干涉条纹图形并将它转换成相移的扫描信号(S0°、S90°、S180°、S270°)。
为了更详细地说明在图4中仅示意示出的周期性检波器装置16,不妨参见图5,该图以俯视图示出了这样的检波器装置16的一部分。周期性检波器装置16包括多个单独的光电子检波器件16.1,16.2……这些器件彼此相邻地按照一定间距D来布置。从提供同相位扫描信号的检波器元件161.1、16.2……的导电连接中,得到了在方向X上的检波器周期性PDET,就是说,检波器件16.1提供同相位扫描信号S0°,检波器件16.5亦如此;检波器件16.2提供同相位的扫描信号S90°,检波器件16.6亦如此,依此类推。
为了在输出端从周期性调制的干涉条纹扫描中产生所希望数量的相位移的扫描信号S0°、S90°、S180°、S270°,需要将检波器-周期PDET按空间干涉条纹图形-周期PIF来调准,也就是说,检波器-周期PDET最好对应于空间干涉条纹图形-周期PIF。在这个例子里,总共应输出四个分别相位移90°的扫描信号S0°、S90°、S180°、S270°。由于这个原因,在一个空间干涉条纹图形周期PIF内,分别总共安置四个检波器件16.1,…,并且分别使每第五个提供同相位扫描信号S0°、S90°、S180°、S270°的检波器件导电相连。
当然下述做法也是可行的,即整个检波器装置16包含多于如图5所示的八个检波器元件16.1、16.2、……。同样,原则上讲,可以如此实现检波器装置16的一个替换布局,即导致了输出端扫描信号的略有不同的相位关系,如三个相位错开120°的扫描信号,等等。
在图6中,与图3视图相似地最后示出了本发明测位仪的所述第二变型方式的立体局部图,其用途亦是特别为了获取围绕一旋转轴线R的旋转相对运动。在本图中,功能相同的元件使用与图3相同的附图标记。
作为第二实施例的所示检波器件的变型方案的替换方式,尤其是在特别小的结构系统和由此造成的小的空间干涉条纹图形-周期PIF的情况下,也可以例如在一个周期PIF内不安置所有的四个检波器件;或者,不同相位的相邻检波器件也可以按照距离d=PIF+PIF/4来布置,等等。
除了上述供选案之外,在本发明范围内,当然还有其它可行设计方案。例如,在此指出一个直线性测位仪的上述变型方式,它包括一直线延伸的标度光栅和相应沿直线布置的扫描光栅。在反射光变型方式的情况下,作为所述实施例的替换方式,将使用一个可用在反射中的标度光栅,等等。
Claims (17)
1.干涉测位仪,它用于测定至少在一个测量方向(X)上相对移动的两个目标的相对位置并且它包括:
-一个光源(1),它沿一光轴(OA)的方向发出一个光束,
-一个安置在光源(1)后面的光学元件(2),该光学元件转换来自光源(1)的光束,
-一个安置在光源(1)后面的标度光栅(3),该光栅将入射光束至少分解成一个第一分光束和一个第二分光束(+1)、(-1),这两个分光束沿不同的空间方向传播,
-分别安置在第一和第二分光束(+1)、(-1)的光路中的每一个扫描光栅(4.1、4.2),其中,每个扫描光栅(4.1、4.2)又将第一和第二分光束(+1)、(-1)分解为第三和第四分光束以及第五和第六分光束,其中至少有两个分光束(+1,-1)、(-1,+1)再次相遇;其中在同第一目标相连的标度光栅(3)相对同第二目标相连的光源(1)和扫描光栅(4.1,4.2)相对移动的情况下,在一个检波平面(D)中得到一个周期性调制的并有一个规定的空间干涉条纹图形-周期(PIF)的干涉条纹图形,
-一个安置在该检波平面中的检波光栅(5),该检波光栅将透过检波光栅(5)的光沿至少三个不同的空间方向加以分解,
-设置在所述的至少三个空间方向上的光电子检波器件(6.1,6.2,6.3),它们用于获取相移的扫描信号(S0°,S120°,S240°),
其中,所述第一和第二扫描光栅被共同安置在一个扫描板(4;14)上,所述扫描板在设有所述第一和第二扫描光栅的区域外被设计成是不透光的,因此,只有来自标度光栅的按照+1/-1级的部分光束有助于信号产生。
2.干涉测位仪,它用于测定至少沿一个测量方向(X)相对移动的两个目标的相对位置并且它包括:
-一个光源(11),它沿一光轴(OA)的方向发出一个光束,
-一个安置在光源(11)后面的光学元件(12),它转换来自光源(11)的光束,
-一个安置在光源(11)后面的标度光栅(13),该光栅将入射光束至少分解成一个第一分光束和一个第二分光束(+1)、(-1),这两个分光束沿不同的空间方向传播,
-分别安置在第一和第二分光束(+1)、(-1)的光路中的每一个扫描光栅(14.1,14.2),其中,每个扫描光栅(14.1,14.2)又将第一和第二分光束(+1)、(-1)分解成第三和第四分光束以及第五和第六分光束,其中至少有两个分光束(+1,-1)、(-1、+1)再次相遇;其中,在同第一目标相连的标度光栅(13)相对同第二目标相连的光源(11)和扫描光栅(14.1,14.2)相对移动的情况下,在一个检波平面(D)中得到一个周期性调制的并有一规定的空间干涉条纹图形-周期(PIF)的干涉条纹图形,
-一个安置在检波平面(D)中的周期性检波器装置(16),它用于获得相移的扫描信号(S0°、S90°、S180°、S270°),该装置包括多个单独的检波器件(16.1…16.8),其中检波器-周期(PDET)与空间干涉条纹图形-周期(PIF)是谐调的,
其中,所述第一和第二扫描光栅被共同安置在一个扫描板(4;14)上,所述扫描板在设有所述第一和第二扫描光栅的区域外被设计成是不透光的,因此,只有来自标度光栅的按照+1/-1级的部分光束有助于信号产生。
3.按权利要求1或2所述的干涉测位仪,其中:所述光源(1;11)被设计为半导体光源。
4.按权利要求1或2所述的干涉测位仪,其中:所述光学元件(2;12)被设计为透镜形式。
5.按权利要求1或2所述的干涉测位仪,其中:所述标度光栅(3;13)被设计为相位衍射光栅,被分解的所述第一和第二分光束(+1)、(-1)对应于+/-1衍射级。
6.按权利要求4所述的干涉测位仪,其中:所述标度光栅(3;13)被设计为具有栅格比ηMG=1∶1和相移MG=180°的相位衍射光栅。
7.按权利要求1或2所述的干涉测位仪,其中:所述扫描光栅(4.1,4.2;14.1,14.2)被设计成相位衍射光栅,被分解的所述第三和第四分光束及所述第五和第六分光束分别对应于+1/-1衍射级。
8.按权利要求6所述的干涉测位仪,其中:所述扫描光栅(4.1,4.2;14.1,14.2)被设计为具有栅格比ηAG=1∶1和相移AG=180°的相位衍射光栅,它们各自具有一个扫描光栅-分解周期(TPAG),该周期小于标度光栅-分解周期(TPMG)。
9.按权利要求1或2所述的干涉测位仪,其中:所述扫描光栅(4.1,4.2;14.1,14.2)被布置成与标度光栅(3;13)有一段距离a1,其中由所述标度光栅(3;13)分解的第一和第二分光束(+1)、(-1)在空间上彼此分开地存在着。
10.按权利要求1或2所述的干涉测位仪,其中:下式适用于在所述标度光栅(3;13)和所述扫描光栅(4.1,4.2;14.1,14.2)之间的距离a1和在所述扫描光栅(4.1,4.2;14.1,14.2)和所述检波平面(D)之间的距离a2
在式中,a1:=在所述标度光栅和所述扫描光栅之间的距离,
a2:=在所述扫描光栅和所述检波平面之间的距离,
TPMG:=标度光栅-分解周期,
PIF:=检波平面中的空间干涉条纹图形-周期,
λ:=光源波长。
11.按权利要求10所述的干涉测位仪,其中:下式适用于所述扫描光栅-分解周期(TPAG)
TPAG=1/(1/TPMG+1/2 PIF)
式中,TPAG:=扫描光栅-分解周期。
12.按权利要求1或2所述的干涉测位仪,其中:所述标度光栅(3)被安置在由所述光学元件(2)转换的光束的光腰区域内。
13.按权利要求1所述的干涉测位仪,其中:所述检波光栅(5)被设计为相位衍射光栅,所述检波光栅将入射光至少分解成O衍射级及+/-2衍射级。
14.按权利要求13所述的干涉测位仪,其中:所述检波光栅(5)被设计为具有栅格比ηDG=1∶2或ηDG=2∶1和相移120°或240°的相位衍射光栅,而且具有一个检波光栅-分解周期(TPDG),该分解周期相当于空间干涉条纹图形-周期(PIF)的两倍。
15.按权利要求2所述的干涉测位仪,其中:检波器-周期(PDET)如此与空间干涉条纹图形-周期相互谐调,即相邻的检波器件(16.1……16.8)提供了各自相位移90°的扫描信号(S0°,S90°,S180°,S270°)。
16.按权利要求15所述的干涉测位仪,其中:在一个空间的干涉条纹图形-周期(PIF)内,设有四个检波器件(16.1,……16.8)。
17.按权利要求2所述的干涉测位仪,其中:提供同相的扫描信号(S0°,S90°,S180°,S270°)的检波器件(16.1,…16.8)分别导电相连。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE10236230 | 2002-08-07 | ||
| DE10236230.0 | 2002-08-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1483995A CN1483995A (zh) | 2004-03-24 |
| CN100334422C true CN100334422C (zh) | 2007-08-29 |
Family
ID=30775074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031274501A Expired - Fee Related CN100334422C (zh) | 2002-08-07 | 2003-08-07 | 干涉测位仪 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7154609B2 (zh) |
| EP (1) | EP1396704B1 (zh) |
| JP (1) | JP4856844B2 (zh) |
| CN (1) | CN100334422C (zh) |
| DE (1) | DE10333772A1 (zh) |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070020133A (ko) * | 2004-07-12 | 2007-02-16 | 미쓰비시덴키 가부시키가이샤 | 광학식 인코더 |
| CN1300549C (zh) * | 2005-05-20 | 2007-02-14 | 浙江大学 | 图像传感器细分纳米分辨率光栅测量方法 |
| DE102005043569A1 (de) * | 2005-09-12 | 2007-03-22 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung |
| US7636165B2 (en) * | 2006-03-21 | 2009-12-22 | Asml Netherlands B.V. | Displacement measurement systems lithographic apparatus and device manufacturing method |
| GB0613902D0 (en) * | 2006-07-13 | 2006-08-23 | Renishaw Plc | Scale and readhead |
| US7480060B2 (en) | 2006-09-08 | 2009-01-20 | Gsi Group Corporation | Interferometric optical position encoder employing spatial filtering of diffraction orders for improved accuracy |
| CN100424467C (zh) * | 2006-12-08 | 2008-10-08 | 华中科技大学 | 一种大量程直线型相位光栅轮廓测量位移传感器 |
| DE102007023300A1 (de) * | 2007-05-16 | 2008-11-20 | Dr. Johannes Heidenhain Gmbh | Positionsmesseinrichtung und Anordnung derselben |
| EP2202492A4 (en) * | 2007-10-05 | 2014-12-31 | Nikon Corp | CODER |
| DE102007055665A1 (de) * | 2007-11-21 | 2009-05-28 | Dr. Johannes Heidenhain Gmbh | Interferometeranordnung und Verfahren zu deren Betrieb |
| WO2010023442A2 (en) * | 2008-08-26 | 2010-03-04 | The University Court Of The University Of Glasgow | Uses of electromagnetic interference patterns |
| KR20110086025A (ko) * | 2008-10-23 | 2011-07-27 | 가부시키가이샤 니콘 | 인코더 |
| WO2010089824A1 (ja) * | 2009-02-06 | 2010-08-12 | 株式会社ニコン | エンコーダ |
| EP2553401B1 (en) | 2010-03-30 | 2015-09-02 | Zygo Corporation | Interferometric encoder systems |
| DE102010063253A1 (de) * | 2010-12-16 | 2012-06-21 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| WO2012106246A2 (en) | 2011-02-01 | 2012-08-09 | Zygo Corporation | Interferometric heterodyne optical encoder system |
| DE102011075286A1 (de) * | 2011-05-05 | 2012-11-08 | Dr. Johannes Heidenhain Gmbh | Optische Positionsmesseinrichtung |
| DE102011111900A1 (de) * | 2011-08-30 | 2013-02-28 | Dr. Johannes Heidenhain Gmbh | Vorrichtung zur interferometrischen Abstandsbestimmung |
| DE102011082570A1 (de) * | 2011-09-13 | 2013-03-14 | Dr. Johannes Heidenhain Gmbh | Rotatorische Positionsmesseinrichtung |
| US9080899B2 (en) * | 2011-12-23 | 2015-07-14 | Mitutoyo Corporation | Optical displacement encoder having plural scale grating portions with spatial phase offset of scale pitch |
| TWI516746B (zh) | 2012-04-20 | 2016-01-11 | 賽格股份有限公司 | 在干涉編碼系統中執行非諧循環錯誤補償的方法、裝置及計算機程式產品,以及微影系統 |
| DE102013221898A1 (de) * | 2013-10-29 | 2015-04-30 | Dr. Johannes Heidenhain Gmbh | Vorrichtung zur Positionsbestimmung |
| JP6386337B2 (ja) | 2014-10-23 | 2018-09-05 | 株式会社ミツトヨ | 光学式エンコーダ |
| JP6437802B2 (ja) | 2014-11-28 | 2018-12-12 | 株式会社ミツトヨ | 光学式エンコーダ |
| JP6593868B2 (ja) | 2015-07-28 | 2019-10-23 | 株式会社ミツトヨ | 変位検出装置 |
| US9651404B2 (en) * | 2015-09-29 | 2017-05-16 | Mitutoyo Corporation | Optical encoder having an optical portion comprising dual lenses and an aperture portion positioned in relation to a moiré grating |
| CN105547184B (zh) * | 2015-12-23 | 2018-12-07 | 华中科技大学 | 一种平面度误差测量装置及其二维扫描工作台 |
| US10126560B2 (en) * | 2016-02-18 | 2018-11-13 | National Engineering Research Center for Optical Instrumentation | Spectrum-generation system based on multiple-diffraction optical phasometry |
| JP2018066629A (ja) * | 2016-10-19 | 2018-04-26 | 太陽誘電株式会社 | ロードセル |
| JP6838954B2 (ja) * | 2016-12-13 | 2021-03-03 | 株式会社ミツトヨ | 光電式エンコーダ |
| US10094685B2 (en) | 2016-12-27 | 2018-10-09 | Mitutoyo Corporation | Displacement encoder |
| US10274344B2 (en) | 2016-12-27 | 2019-04-30 | Mitutoyo Corporation | Displacement encoder |
| US10302466B2 (en) | 2017-06-29 | 2019-05-28 | Mitutoyo Corporation | Contamination and defect resistant optical encoder configuration including first and second illumination source diffraction gratings arranged in first and second parallel planes for providing displacement signals |
| US10168189B1 (en) * | 2017-06-29 | 2019-01-01 | Mitutoyo Corporation | Contamination and defect resistant optical encoder configuration for providing displacement signal having a plurality of spatial phase detectors arranged in a spatial phase sequence along a direction transverse to the measuring axis |
| CN110375640B (zh) * | 2019-06-06 | 2020-12-29 | 杭州电子科技大学 | 一种测量透明物体的旋转式相移干涉仪及测量方法 |
| CN110285761B (zh) * | 2019-07-03 | 2021-02-23 | 哈尔滨工业大学 | 一种结构紧凑的光栅三维位移测量装置 |
| CN110907140A (zh) * | 2019-11-25 | 2020-03-24 | 南京南智先进光电集成技术研究院有限公司 | 一种光栅周期的测量装置及方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5430546A (en) * | 1990-03-13 | 1995-07-04 | Dr. Johannes Heidenhain Gmbh | Optical device for measuring relative position of or angle between two objects |
| US5574558A (en) * | 1994-05-19 | 1996-11-12 | Ricoh Company, Ltd. | Optical encoding apparatus for measuring displacement of an object using diffraction gratings and twice-diffracted and twice-transmitted light |
| US6005667A (en) * | 1996-07-23 | 1999-12-21 | Canon Kabushiki Kaisha | Optical displacement measurement apparatus and information recording apparatus |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1516536A (en) * | 1975-08-22 | 1978-07-05 | Ferranti Ltd | Measuring apparatus |
| JPS6225212A (ja) * | 1985-07-26 | 1987-02-03 | Agency Of Ind Science & Technol | 相対変位量測定装置 |
| US5079418A (en) * | 1990-02-20 | 1992-01-07 | Dr. Johannes Heidenhain Gmbh | Position measuring apparatus with reflection |
| DE4033013C2 (de) * | 1990-10-18 | 1994-11-17 | Heidenhain Gmbh Dr Johannes | Polarisationsoptische Anordnung |
| US5486923A (en) * | 1992-05-05 | 1996-01-23 | Microe | Apparatus for detecting relative movement wherein a detecting means is positioned in the region of natural interference |
| DE59203396D1 (de) * | 1992-07-18 | 1995-09-28 | Heidenhain Gmbh Dr Johannes | Optische Vorrichtung. |
| US5652426A (en) * | 1993-04-19 | 1997-07-29 | Ricoh Company, Ltd. | Optical encoder having high resolution |
| ATE159811T1 (de) * | 1993-07-17 | 1997-11-15 | Heidenhain Gmbh Dr Johannes | Längen- oder winkelmesseinrichtung |
| US5530543A (en) * | 1994-07-06 | 1996-06-25 | Optra, Inc. | Detector array for use in interferometric metrology systems |
| DE19502727A1 (de) * | 1995-01-28 | 1996-08-01 | Heidenhain Gmbh Dr Johannes | Phasengitter |
| DE19511068A1 (de) * | 1995-03-25 | 1996-09-26 | Heidenhain Gmbh Dr Johannes | Lichtelektrische Positionsmeßeinrichtung |
| JP3407477B2 (ja) * | 1995-06-08 | 2003-05-19 | 松下電器産業株式会社 | 位相格子とその作製方法並びに光学式エンコーダ |
| DE19521295C2 (de) * | 1995-06-10 | 2000-07-13 | Heidenhain Gmbh Dr Johannes | Lichtelektrische Positionsmeßeinrichtung |
| JPH0935500A (ja) * | 1995-07-21 | 1997-02-07 | Toshiba Corp | 不揮発性半導体記憶装置のスクリーニング方法 |
| DE19532246A1 (de) * | 1995-09-01 | 1997-03-06 | Heidenhain Gmbh Dr Johannes | Vorrichtung zur Filterung von Oberwellen-Signalanteilen |
| JP3631551B2 (ja) | 1996-01-23 | 2005-03-23 | 株式会社ミツトヨ | 光学式エンコーダ |
| JPH1038517A (ja) * | 1996-07-23 | 1998-02-13 | Canon Inc | 光学式変位測定装置 |
| EP0932819B1 (de) * | 1996-10-16 | 2002-01-30 | Dr. Johannes Heidenhain GmbH | Optische positionsmesseinrichtung |
| JPH10190148A (ja) * | 1996-12-26 | 1998-07-21 | Olympus Optical Co Ltd | 面発光光源およびこれを用いた光学式センサー |
| JPH10267694A (ja) * | 1997-03-28 | 1998-10-09 | Matsushita Electric Ind Co Ltd | ロータリーエンコーダ |
| EP0978708B1 (de) * | 1998-08-01 | 2005-10-05 | Dr. Johannes Heidenhain GmbH | Rotatorische Positionsmesseinrichtung |
| ATE448466T1 (de) * | 1999-09-16 | 2009-11-15 | Heidenhain Gmbh Dr Johannes | Vorrichtung zur positionsbestimmung und ermittlung von führungsfehlern |
-
2003
- 2003-07-23 DE DE10333772A patent/DE10333772A1/de not_active Withdrawn
- 2003-07-23 EP EP03016538.5A patent/EP1396704B1/de not_active Expired - Lifetime
- 2003-08-05 JP JP2003286880A patent/JP4856844B2/ja not_active Expired - Fee Related
- 2003-08-06 US US10/635,422 patent/US7154609B2/en not_active Expired - Lifetime
- 2003-08-07 CN CNB031274501A patent/CN100334422C/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5430546A (en) * | 1990-03-13 | 1995-07-04 | Dr. Johannes Heidenhain Gmbh | Optical device for measuring relative position of or angle between two objects |
| US5574558A (en) * | 1994-05-19 | 1996-11-12 | Ricoh Company, Ltd. | Optical encoding apparatus for measuring displacement of an object using diffraction gratings and twice-diffracted and twice-transmitted light |
| US6005667A (en) * | 1996-07-23 | 1999-12-21 | Canon Kabushiki Kaisha | Optical displacement measurement apparatus and information recording apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1396704A2 (de) | 2004-03-10 |
| EP1396704B1 (de) | 2015-10-07 |
| US20040090637A1 (en) | 2004-05-13 |
| JP4856844B2 (ja) | 2012-01-18 |
| JP2004069702A (ja) | 2004-03-04 |
| DE10333772A1 (de) | 2004-02-26 |
| EP1396704A3 (de) | 2006-02-08 |
| US7154609B2 (en) | 2006-12-26 |
| CN1483995A (zh) | 2004-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100334422C (zh) | 干涉测位仪 | |
| CN1932435B (zh) | 位置测量设备 | |
| CN101144730B (zh) | 位置测量装置 | |
| Hartig et al. | Geometric tilt-to-length coupling in precision interferometry: mechanisms and analytical descriptions | |
| US8817272B2 (en) | Optical position-measuring device | |
| US5977539A (en) | Optical position-measuring device having reference mark graduation structures with chirp fields | |
| CN102341669B (zh) | 利用频率扫描干涉仪对多表面测试物体的测量 | |
| CN102384716A (zh) | 固定波长绝对距离干涉仪 | |
| EP3012591B1 (en) | Optical encoder | |
| Hartig et al. | Non-geometric tilt-to-length coupling in precision interferometry: mechanisms and analytical descriptions | |
| CN103512505A (zh) | 用于干涉式间距测量的设备 | |
| CN104515468A (zh) | 光学位置测量装置 | |
| CN105300278A (zh) | 光学位置测量装置 | |
| JP6588836B2 (ja) | 光学位置測定装置 | |
| US4049965A (en) | Measurement apparatus | |
| CN107490339A (zh) | 光学位置测量装置 | |
| CN109708569B (zh) | 光学位置测量装置 | |
| US4929077A (en) | Interferometric range finder | |
| CN101308013B (zh) | 位置测量装置 | |
| US10088341B2 (en) | Photoelectric encoder | |
| JPH06201327A (ja) | 変位検出装置 | |
| CN105783713B (zh) | 光学位置测量装置 | |
| US9739598B2 (en) | Device for interferential distance measurement | |
| JP2020020788A (ja) | 光学式エンコーダ | |
| US6943341B2 (en) | Position measuring system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20070829 Termination date: 20200807 |