WO2025027787A1 - 制御装置、パラメータ補正方法およびプログラム - Google Patents
制御装置、パラメータ補正方法およびプログラム Download PDFInfo
- Publication number
- WO2025027787A1 WO2025027787A1 PCT/JP2023/028110 JP2023028110W WO2025027787A1 WO 2025027787 A1 WO2025027787 A1 WO 2025027787A1 JP 2023028110 W JP2023028110 W JP 2023028110W WO 2025027787 A1 WO2025027787 A1 WO 2025027787A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- temperature
- robot
- joints
- deviation
- parameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
Definitions
- This disclosure relates to a control device, a parameter correction method, and a program.
- Patent Document 1 The positioning accuracy of industrial machinery can decrease over time, and various systems have been proposed to improve the positioning accuracy of industrial machinery (for example, Patent Document 1 and Patent Document 2).
- JP 2019-141983 A Japanese Patent Application Publication No. 11-333670
- One aspect of the present disclosure is a control device for a robot, the control device comprising: a temperature monitoring unit that monitors the temperature of one or more joints of the robot; a parameter storage unit that stores parameters indicating mechanical characteristics of joint axes of the one or more joints; an information storage unit that stores information indicating a temperature-dependent deviation of the parameters; and a correction unit that corrects the parameters in accordance with a temperature change of the one or more joints monitored by the temperature monitoring unit based on the information indicating the deviation.
- FIG. 1 is a diagram illustrating a device configuration of a robot system according to a first embodiment.
- FIG. 1 is a functional block diagram of a robot system according to a first embodiment.
- FIG. 13 is a diagram showing an example of a data table showing the amount of deviation of mastering data depending on temperature. 13 is a flowchart showing a mastering data correction process. 13 is a diagram showing a state in which a data table showing the amount of deviation of mastering data based on the detected value of the temperature of a motor and a data table showing the amount of deviation of mastering data based on the detected value of the temperature of a torque sensor are both stored in a memory unit.
- FIG. 13 is a diagram showing a configuration for measuring the position of a robot and creating a data table.
- FIG. 11 is a flowchart showing a data table creation process according to the first embodiment.
- FIG. 11 is a functional block diagram of a robot system according to a second embodiment.
- FIG. 13 is a diagram illustrating an example of a data table showing deviation amounts of mechanism error parameters depending on temperature.
- 11 is a flowchart showing a mechanism error parameter correction process.
- FIG. 11 is a diagram illustrating a data table creation process according to the second embodiment.
- FIG. 11 is a functional block diagram of a robot system according to a third embodiment. 13 is a flowchart showing a parameter correction process according to the third embodiment.
- FIG. 1 is a diagram showing the equipment configuration of a robot system 100 according to a first embodiment. Note that Fig. 1 shows an external perspective view of the configuration of a robot 1.
- the robot system 100 includes the robot 1, a robot control device 20 that controls the robot 1, a teaching pendant 30 connected to the robot control device 20, and a three-dimensional measuring device 90.
- the robot 1 is a six-axis vertical articulated robot.
- Various types of robots may be used as the robot 1 depending on the work target, such as a SCARA robot, a parallel link robot, or a dual-arm robot.
- the robot 1 can perform the desired work using a work tool as an end effector attached to the wrist.
- the work tool is an external device that can be replaced depending on the application, such as a hand, a welding gun, or a tool.
- a welding gun 5 is used as the work tool.
- the robot 1 can perform welding work by setting the welding gun 5 to a desired position and posture according to the robot program.
- the temperature of each joint may rise during operation of the robot, causing a slight change in the position of the robot's hand.
- the robot system 100 stores information representing temperature-dependent deviations of parameters representing the mechanical characteristics of each joint axis of the robot 1 in advance by measurement using a three-dimensional measuring device 90, and stores the information in the storage unit 22 (see FIG. 2).
- the robot system 100 is configured to correct the parameters according to the temperature changes of each joint based on the information during actual operation, and to control the operation of the robot 1 in accordance with the corrected parameters.
- the temperature of a joint includes not only the temperature inside the joint, but also the temperature of elements (including motors, reducers, encoders, torque sensors, etc.) that constitute the drive mechanism of the axis of the joint, and the temperature of the arm corresponding to the joint (either of the arms on either side of the joint).
- the robot system 100 prevents the position of the robot 1's hand from changing due to temperature changes in each joint, and makes it possible to maintain the positional accuracy of the robot with high precision.
- the robot control device 20 controls the operation of the robot 1 according to the robot program or commands from the teaching operation panel 30.
- the robot control device 20 may have a hardware configuration as a general computer having a processor 21, memory (ROM, RAM, non-volatile memory, etc.), a storage unit 22, an operation unit, an input/output interface, a network interface, etc. (see FIG. 2).
- the teaching operation panel 30 is used as an operation terminal for teaching the robot 1 and performing various settings.
- a teaching device configured with a tablet terminal or the like may be used as the teaching operation panel 30.
- the teaching operation panel 30 may have a hardware configuration as a general computer having a processor, memory (ROM, RAM, non-volatile memory, etc.), a storage device, an operation unit, a display unit 31, an input/output interface, a network interface, etc. (see FIG. 2).
- the teaching operation panel 30 may be considered as part of the components of the robot control device 20.
- the robot 1 includes a base 14, a swivel base 13, a lower arm 12, an upper arm 11, a wrist 15, and a flange 16.
- the lower arm 12 is supported by the swivel base 13.
- the swivel base 13 is supported by the base 14.
- the wrist 15 is connected to the end of the upper arm 11.
- the wrist 15 includes a flange 16 to which the welding gun 5 is fixed.
- the components such as the upper arm 11 and the lower arm 12 are connected via joints.
- the origin of a world coordinate system 71 is set on the base 14 of the robot 1.
- the world coordinate system 71 is also called a reference coordinate system, and remains stationary when the position and posture of the robot 1 change.
- a tool coordinate system 72 having an origin set at an arbitrary position of the work tool is set on the robot 1.
- the position and posture of the tool coordinate system 72 change together with the welding gun 5.
- the origin of the tool coordinate system 72 is set at the tool tip point 72a (the tip point of the fixed electrode).
- the position of the robot 1 corresponds to the position of the tool tip point (the position of the origin of the tool coordinate system 72).
- the posture of the robot 1 corresponds to the posture of the tool coordinate system 72 with respect to the world coordinate system 71.
- joint axes J1 to J6 at each joint are shown.
- the angle of the joint is determined for each joint axis J1 to J6.
- the angle of the joint corresponds to the angle between the components at the joint.
- the angle of the joint also corresponds to the rotational position of the drive motor arranged corresponding to each joint.
- the robot 1 is provided with a drive mechanism corresponding to each of the joint axes J1 to J6.
- the drive mechanism provided for each joint axis includes a motor 2, a reducer, an encoder 3, a torque sensor 4, etc.
- the torque sensor 4 is a sensor that detects the torque applied to each joint axis. These components of the drive mechanism provided for each joint axis are shown in a dashed square in the robot 1 in FIG. 1.
- the robot 1 is provided with a motor temperature detector 2a that detects the temperature of the motor 2 and a torque sensor temperature detector 4a that detects the temperature of the torque sensor 4 as detectors for detecting the temperature of each joint. Note that FIG.
- FIG. 2 shows an example in which both the motor temperature detector 2a and the torque sensor temperature detector 4a are provided as detectors for detecting the temperature of each joint, but a configuration in which either the motor temperature detector 2a or the torque sensor temperature detector 4a is provided as a detector for detecting the temperature of each joint may be used.
- the robot control device 20 includes an operation control unit 121, a temperature monitoring unit 122, a measurement unit 123, and a mastering data correction unit 124. These functional blocks may be realized by the processor 21 of the robot control device 20 executing software.
- FIG. 2 also illustrates a memory unit 22 as a hardware component of the robot control device 20.
- the memory unit 22 is a storage device consisting of, for example, a non-volatile memory or a hard disk device.
- the memory unit 22 stores a robot program 81, a measurement program 82, mastering data 83, mechanism data (mechanism error parameters) 84, a data table 85 for correcting the mastering data, etc.
- the memory unit 22 functions as a parameter memory unit that stores parameters (mastering data and mechanism data (mechanism error parameters)) that indicate the mechanical characteristics of each joint axis of the robot 1, and also functions as an information memory unit that stores information that indicates the temperature-dependent deviation of the parameters that indicate the mechanical characteristics of each joint axis.
- the mastering data 83 is the value of the encoder 3 that detects the rotation angle of each joint axis of the robot when the robot 1 is placed at the origin position.
- the memory unit 22 stores the mastering data 83 that is generated by a mastering operation that is performed, for example, after the robot 1 is manufactured. By performing the mastering operation on each robot, the tip point of the work tool can be placed at the desired position even if the components of the robot have dimensional errors due to individual differences.
- Mechanism data (mechanism error parameters) 84 is data that represents the geometric relationships between the joint axes of the robot, and is used in calculations to determine the angular position of each joint axis from the robot's hand position.
- the mastering data 83 and mechanism data (mechanism error parameters) 84 can be considered as parameters that indicate the mechanical characteristics of each joint axis of the robot 1.
- the movement control unit 121 of the robot control device 20 controls the movement of the robot 1 by performing kinematic calculations according to the robot program 81 and commands in accordance with the mastering data 83 and mechanism data (mechanism error parameters) 84.
- the robot control device 20 is equipped with a servo control unit (not shown) that performs servo control on the servo motors of each axis according to the commands for each axis generated by the movement control unit 121.
- the robot control device 20 of this embodiment creates and stores in advance information representing the temperature-dependent deviation of the mastering data 83.
- the measurement unit 123 can use the three-dimensional measurement device 90 to measure and obtain the temperature-dependent angular deviation of each joint axis, and store this as information representing the temperature-dependent deviation of the mastering data 83.
- the acquisition and storage of the information representing the temperature-dependent deviation of the mastering data 83 by the measurement unit 123 and the three-dimensional measurement device 90 will be described later.
- the information representing the temperature-dependent deviation in the angle of each joint axis can be a function or graph representing the temperature-dependent variation in the angle of each joint axis, or a data table representing the temperature-dependent deviation in the angle of each joint axis.
- a data table is used as information representing the temperature-dependent deviation in the angle of each joint axis.
- a data table 85 representing the temperature-dependent deviation in the angle of each joint axis is stored in the memory unit 22.
- the temperature monitoring unit 122 has the function of monitoring the temperature of each joint of the robot 1.
- the temperature monitoring unit 122 can use, as the temperature of each joint, either the detection value of the motor temperature detector 2a provided corresponding to each joint axis, or the detection value of the torque sensor temperature detector 4a.
- the temperature monitoring unit 122 can obtain the temperature of each joint based on both the detection value of the motor temperature detector 2a and the detection value of the torque sensor temperature detector 4a.
- the mastering data correction unit 124 has a function of correcting the parameters indicating the mechanical characteristics of each joint axis in response to temperature changes based on information indicating the temperature-dependent deviation of the parameters.
- the mastering data correction unit 124 can correct the mastering data 83 in response to temperature changes monitored by the temperature monitoring unit 122 based on the data table 85.
- Data table 85 is a table that indicates the deviation (angle) of the angle of each joint axis when the temperature of each joint rises by 5°C to 15°C, 20°C, 25°C, 30°C, and so on, with 10°C as the reference temperature and the angle of each joint axis at 10°C as the reference.
- data table 85 in Figure 3 indicates that, for example, with respect to the first joint axis J1 (first axis), when the deviation at 10°C is set to 0, the deviations at 15°C, 20°C, 25°C, and 30°C are 0.1 degrees, 0.2 degrees, 0.3 degrees, and 0.4 degrees, respectively.
- the mastering data correction unit 124 refers to the data table 85 and corrects the mastering data 83 according to the temperature of each joint monitored by the temperature monitoring unit 122. Specifically, the mastering data correction unit 124 acquires the deviation amount (angle) corresponding to the temperature change from the reference temperature from the data table 85, converts the acquired deviation amount into a pulse value of the encoder 3, and corrects the mastering data 83 using the pulse value.
- the operation control unit 121 generates commands for each joint axis in accordance with the mastering data 83 thus corrected, and operates the robot 1. Therefore, with the above configuration, fluctuations in the hand position of the robot 1 that depend on temperature changes are eliminated, making it possible to control the robot 1 with high precision.
- the data table 85 defines the amount of angle deviation that depends on temperature for each joint axis, so even in situations where the degree of temperature rise differs for each joint axis, the angle deviation of each joint axis can be appropriately corrected according to the respective temperature changes, making it possible to maintain high accuracy of the positioning of the robot 1.
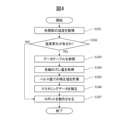
- FIG. 4 is a flow chart showing the mastering data correction process executed under the control of the processor 21 of the robot control device 20.
- the temperature monitoring unit 122 monitors the temperature of each joint (step S101).
- the temperature monitoring unit 122 preferably monitors the temperature of each joint based on the detection value of the motor temperature detector 2a, and when the data table 85 is created based on the detection value of the torque sensor temperature detector 4a, the temperature monitoring unit 122 preferably monitors the temperature of each joint based on the detection value of the torque sensor temperature detector 4a.
- the temperature monitoring unit 122 determines whether or not a temperature change occurs in each joint (step S102).
- this process is first started, it is determined that there is a temperature change if the temperature of any joint has changed by a predetermined temperature (e.g., 5° C.) or more from the reference temperature, or
- a predetermined temperature e.g., 5° C.
- this process is repeatedly executed, in the second or subsequent executions, if the change in temperature of any joint from the previous measured temperature is equal to or greater than a predetermined temperature (e.g., 5°C), it is determined that a temperature change has occurred.
- a predetermined temperature e.g., 5°C
- step S107 If it is determined that there is no temperature change (S102: NO), the mastering data 83 is not corrected and the operation control of the robot 1 is executed (step S107).
- the mastering data correction unit 124 refers to the data table 85 (step S103) and obtains from the data table 85 the amount of deviation in the angle of each joint axis corresponding to the temperature change (step S104). For example, if the temperature of the first joint has risen by 5°C from the temperature (15°C) at the time of the previous execution of the mastering data correction process to 20°C, the mastering data correction unit 124 obtains from the data table 85 the amount of deviation (0.2°) for that joint at 20°C (step S104).
- the mastering data correction unit 124 obtains a correction value by converting the acquired deviation amount into an encoder pulse value (step S105).
- the mastering data correction unit 124 then corrects the mastering data 83 using this correction value (step S106).
- the operation control unit 121 controls the operation of the robot 1 in accordance with this corrected mastering data 83 (step S107). This process prevents fluctuations in the hand position of the robot 1 that depend on temperature changes, making it possible to control the robot 1 with high precision.
- step S106 since the series of processes from determining the temperature change in step S102 to correcting the mastering data 83 in step S106 is executed for each joint axis, even in a situation where the temperature change conditions differ for each joint, the angle of each joint axis is appropriately corrected according to the temperature change for each joint.
- the mastering data correction process may be executed repeatedly at regular intervals while the robot 1 is in operation, for example.
- the mastering data 83 can be corrected at any time in response to temperature changes while the robot 1 is in operation, making it possible to operate the robot 1 with high accuracy.
- the mastering data correction process may be executed before the robot 1 is caused to perform a specified task.
- the mastering data correction process may be started by a command from the user via the teaching operation panel 30. In these cases as well, the positional accuracy of the robot 1 can be maintained at a high level.
- the robot control device 20 holds one data table 85 created based on either the detection value of the motor temperature detector 2a or the detection value of the torque sensor temperature detector 4a, and corrects the mastering data 83 using this data table 85.
- a configuration example will be described in which the robot control device 20 holds a data table 85A created based on the detection value of the motor temperature detector 2a and a data table 85B created based on the detection value of the torque sensor temperature detector 4a, and corrects the mastering data 83 using these data tables 85A and 85B in combination.
- the robot control device 20 holds data table 85A and data table 85B in the memory unit 22, as shown in FIG. 5.
- Data table 85A is a data table showing the amount of deviation of the angle of each joint axis that depends on the temperature (motor temperature), created by measuring the deviation of the hand position of robot 1 with three-dimensional measuring device 90 while monitoring the temperature change of each joint with the detection value of motor temperature detector 2a.
- Data table 85B is a data table showing the amount of deviation of the angle of each joint axis that depends on the temperature (torque sensor temperature), created by measuring the deviation of the hand position of robot 1 with three-dimensional measuring device 90 while monitoring the temperature change of each joint with the detection value of torque sensor temperature detector 4a.
- the temperature monitoring unit 122 acquires temperature detection values from both the motor temperature detector 2a and the torque sensor temperature detector 4a and monitors the temperature of each joint (step S101). Then, the temperature monitoring unit 122 determines whether or not there is a temperature change (step S102).
- a YES determination may be made if there is a temperature change in either the motor temperature detector 2a or the torque sensor temperature detector 4a.
- the processes in steps S103 to S106 may be performed using a data table corresponding to the temperature detector in which the temperature change was detected.
- a YES determination may be made if there is a temperature change in both the motor temperature detector 2a and the torque sensor temperature detector 4a.
- the mastering data correction unit 124 performs mastering data correction using both data table 85A and data table 85B (steps S103 to S106). Specifically, in step S103, the mastering data correction unit 124 refers to both data table 85A and data table 85B (step S103), and obtains the amount of deviation in the angle of each joint axis corresponding to the temperature change of each temperature detector from each of data tables 85A and 85B (step S104). For example, assume that the detection values of the motor temperature detector 2a and the torque sensor temperature detector 4a indicate a 5°C rise from the reference temperature of 10°C as the previous measured temperature.
- the mastering data correction unit 124 obtains the deviation amounts (0.1°, 0.1°, 0.1°, 0.1°, 0.1°, 0.1°) for the first joint axis J1 (first axis) to the sixth joint axis J6 (sixth axis) from the data table 85A, and obtains the deviation amounts (0.2°, 0.2°, 0.2°, 0.1°, 0.1°, 0.1°) for the first joint axis J1 (first axis) to the sixth joint axis J6 (sixth axis) from the data table 85B.
- the mastering data correction unit 124 calculates a correction value of the mastering data 83 by using the deviation amount acquired from the data table 85A and the deviation amount acquired from the data table 85B in combination (step S105).
- the following method can be used to use two deviation amounts obtained from both the data table 85A and the data table 85B for one joint axis in combination: (a1) adopt the larger deviation amount, or (a2) The sum of the two deviation amounts is adopted; There could be a way like this.
- the method (a1) above can obtain a more appropriate amount of deviation.
- the method (a2) above can also obtain an appropriate amount of deviation.
- the deviation amount may be obtained in accordance with the method (a1) or (a2) above.
- the mastering data correction unit 124 obtains the encoder pulse value corresponding to the deviation amount of each joint axis obtained in this manner, and sets it as a correction value (step S105). The mastering data correction unit 124 then corrects the mastering data using this correction value (step S106).
- this configuration example can make it possible to maintain the positional accuracy of the robot with a higher degree of precision.
- thermosensor arranged for each joint i.e., two locations
- the mastering data is corrected using information that represents the deviation of each joint axis in response to temperature changes at these two locations.
- Fig. 6 shows the details of the measuring unit 123 in the functional block diagram shown in Fig. 2, and illustrates the situation in which the position of the robot 1 is measured by the three-dimensional measuring device 90.
- the measuring unit 123 includes a position information acquiring unit 125 and a calculation unit 126.
- the position information acquiring unit 125 has a function of acquiring position information of the robot 1 as a measurement result from the three-dimensional measuring device 90.
- the calculation unit 126 has a function of calculating the temperature-dependent deviation of the angle of each joint axis of the robot 1 based on the measured position of the robot 1.
- the three-dimensional measuring device 90 can emit laser light in any direction, and can measure the position of the reflector 91 by detecting the laser light returning from the reflector 91.
- the reflector 91 is placed at the origin position of the tool coordinate system 72 (see Figure 1) of the robot 1, and therefore the three-dimensional measuring device 90 can measure the position of the robot 1.
- a reference coordinate system set in the working space is preset in the three-dimensional measuring device 90, and the three-dimensional measuring device 90 can provide the measured position of the robot 1 as a position relative to this reference coordinate system.
- FIG. 7 is a flowchart showing the data table creation process in which the position of the robot 1 is measured using the function of the measurement unit 123 to create a data table. This process may be realized by the processor 21 executing the measurement program 82.
- the data table creation process will be explained with reference to the flowchart in FIG. 7. Here, it is assumed that each joint is initially at a reference temperature and that the temperature monitoring unit 122 starts monitoring the temperature of each joint.
- the measurement unit 123 (position information acquisition unit 125) gives a predetermined movement command to the robot 1 at a reference temperature, and measures the hand position of the robot 1 that has moved in response to the movement command using the three-dimensional measurement device 90.
- the calculation unit 126 obtains and records the angular positions D0 n of each joint axis corresponding to this hand position by inverse kinematics calculation (step S501). Note that in this inverse kinematics calculation, accurate calculation can be performed by applying the mechanism data (mechanism error parameters) 84 identified by measurements performed in advance.
- step S502 determines whether or not a temperature rise of a certain temperature has occurred for each joint (step S502).
- the process of step S502 is repeated until a temperature rise of a certain temperature (e.g., 5°C) is detected (S502: NO). If it is determined that a temperature rise of a certain temperature has occurred (S502: YES), the process proceeds to step S503.
- a temperature rise of a certain temperature e.g., 5°C
- step S503 the measurement unit 123 (position information acquisition unit 125) issues the same movement command as in step S501 to the robot 1 when the temperature of each joint has risen to a certain temperature, and measures the hand position of the robot 1 that has moved in response to the movement command using the three-dimensional measurement device 90.
- the calculation unit 126 obtains and records the angular positions D1 n of each joint axis corresponding to this hand position by inverse kinematics calculation. Note that in this inverse kinematics calculation, accurate calculation can be performed by applying the mechanism data (mechanism error parameters) 84 identified by measurements performed in advance.
- the calculation unit 126 calculates the difference between the angular position D0 n of each joint at the reference temperature and the angular position D1 n of each joint when the temperature rises by a certain amount (step S504).
- the difference calculated here is data to be recorded in the data table as the deviation amount when the temperature rises by the certain amount.
- the measurement unit 123 determines whether or not the deviation amount has been obtained for each of the predetermined temperature values for creating the data table (step S505). If the deviation amount has not yet been obtained for each of the predetermined temperature values, the process continues from step S502. If the deviation amount has been obtained for each of the predetermined temperature values (S505: YES), the data table is completed, and this process ends.
- step S502 of the data table creation process shown in FIG. 7 determines whether the temperature has dropped by a certain amount, and steps S503-S504 perform measurements and calculate the amount of angle deviation when the temperature has dropped by a certain amount.
- a data table 85 like that shown in FIG. 3 can be created. Note that, for the deviation amount for temperatures for which no measurement data is available in the data table 85, data may be interpolated using various data interpolation methods.
- steps S501 and S503 multiple types of common movement commands can be given to the robot 1 to measure the hand position and calculate the angular position for the multiple types of movement commands, thereby obtaining multiple amounts of angular deviation of each joint axis in response to a certain temperature change in step S504, and the statistics (average value, etc.) of the multiple obtained deviation amounts can be used as the deviation amounts to be written to the data table. This can reduce the effects of measurement errors in the data table creation process.
- the mastering data correction unit 124 can correct the mastering data 83 as described above using the data table created by the procedure described above with reference to FIG. 7.
- the robot control device 20 can prevent the hand position of the robot 1 from changing due to temperature changes in each joint, and can maintain the positional accuracy of the robot 1 with high precision. This also improves the quality of the robot system 100 as a production system.
- the mastering data 83 is corrected using a data table (information representing the temperature-dependent deviation in the angle of each joint axis) that is prepared in advance through measurements using a three-dimensional measuring device 90, so the processing required to maintain high accuracy of the robot's position can be performed instantly.
- a data table information representing the temperature-dependent deviation in the angle of each joint axis
- a data table is used as information representing the temperature-dependent deviation in the angle of each joint axis.
- information in the form of a function or graph representing the temperature-dependent fluctuation in the angle of each joint axis it is possible to achieve even more detailed correction of the mastering data in response to temperature changes.
- information representing the temperature-dependent deviation in the angle of each joint axis is held as information in the form of a function or graph, it is possible to obtain data representing the temperature-dependent deviation in the angle of each joint axis by measurements such as those shown in FIG. 7, and apply a linear regression model or a nonlinear regression model to the obtained data.
- a method of performing mastering using a calibration jig for all axes of the robot, or a method of performing mastering of all axes using a camera (vision) may be applied.
- the amount of deviation may be obtained by comparing the mastering value obtained by performing all-axis vision mastering at a reference temperature with the mastering value obtained by performing all-axis vision mastering when the temperature has changed by a certain amount.
- a robot system 100A according to a second embodiment will be described.
- the equipment configuration of the robot system 100A according to the second embodiment is the same as that of the robot system 100 according to the first embodiment shown in FIG. 1, so the description of the equipment configuration will be omitted.
- the robot system 100A according to the second embodiment is configured to maintain high positional accuracy of the robot 1 by correcting deviations due to temperature of mechanism error parameters included in the mechanism data of the robot 1.
- the mechanism data (mechanism error parameters) 84 can be regarded as parameters that represent the mechanical characteristics of each joint axis of the robot 1.
- the DH parameters for each motion axis can be used as the mechanism data.
- the DH parameters are parameters in the DH (Denavit Hartenberg) method used in a relational expression that defines the relationship between the angular position of each motion axis of the robot and the tip position of the robot.
- DH Densavit Hartenberg
- a coordinate system is set for each joint axis, and the position and posture of the robot are expressed based on the relationship between the coordinate systems of adjacent joint axes.
- parameters ⁇ , d, a, ⁇ , and ⁇ are used. The meaning of each parameter is shown below.
- ⁇ Rotation angle from the x i-1 axis to the x i axis (around the z i-1 axis)
- d Distance from the origin of the (i-1)th coordinate system to the intersection of the z i-1 axis and the x i axis (link length)
- a Distance from the intersection of the z i-1 axis and the x i axis to the origin of the i-th coordinate system (distance between joint axes)
- ⁇ rotation angle from z i-1 axis to z i axis (around x i axis)
- ⁇ Rotation angle from z i-1 axis to z i axis (around y i axis)
- Each DH parameter can be expressed in a form including a design value (or theoretical value) and an error (e.g., d i + ⁇ d).
- the mechanism error parameters can include elements that change the position and posture of the tip of the robot, such as errors in the above DH parameters ( ⁇ i , d i , a i , ⁇ i , ⁇ i ) that can be defined for each joint axis, a spring constant for the torque generated in the three-dimensional direction of each drive axis (an element representing the deflection of the arm due to gravity or an external force), and an angular transmission error that models the relationship between the encoder output of each axis and the amount of rotation.
- FIG. 8 shows a functional block diagram of a robot system 100A according to the second embodiment.
- the robot control device 20A includes a mechanism error parameter correction unit 127.
- the measurement unit 123 has a function of creating a data table 86 that represents the temperature-dependent deviation amount of the mechanism error parameter for each joint axis, and storing the data table 86 in the memory unit 22.
- the mechanism error parameter correction unit 127 has a function of correcting the parameter indicating the mechanical characteristics of each joint axis in response to temperature changes based on information indicating the temperature-dependent deviation of the parameter.
- the mechanism error parameter correction unit 127 can correct the mechanism error parameter in response to temperature changes based on the data table 86.
- FIG. 9 shows an example of the configuration of the data table 86.
- a data table for DH parameters ( ⁇ , d, a, ⁇ , ⁇ ) is shown.
- the temperature-dependent deviations of the DH parameters are indicated by symbols DH_ ⁇ p1 to DH_ ⁇ p5. Note that in FIG. 9, to avoid complexity, numerical values are shown only for some joint axes.
- the data table 86 indicates the deviations of the DH parameters for each joint axis when the temperature of each joint axis rises by 5°C, from 10°C, with 10°C as the reference temperature, and the DH parameter value at 10°C as the reference.
- Figure 9 shows an example of creating a data table using five DH parameters, it is also possible to create a data table related only to link length d, and correct deviations due to temperature changes only for link length d.
- the mechanism error parameter correction unit 127 can refer to such a data table 86 and correct the mechanism error parameters according to the temperature changes of each joint monitored by the temperature monitoring unit 122.
- FIG. 10 is a flowchart showing the mechanism error parameter correction process executed under the control of the processor 21 of the robot control device 20A.
- the temperature monitoring unit 122 monitors the temperature of each joint (step S201).
- the temperature monitoring unit 122 determines whether or not a temperature change has occurred in each joint (step S202).
- step S206 If it is determined that there is no temperature change (S202: NO), the mechanism error parameters are not corrected and the motion control of the robot 1 is executed (step S206).
- the mechanism error parameter correction unit 127 refers to the data table 86 (step S203) and obtains the deviation amount of the mechanism error parameter of each joint axis according to the temperature change (step S204).
- the mechanism error parameter correction unit 127 corrects the mechanism error parameters according to the deviation amount of the mechanism error parameters for each joint axis obtained (step S205). This corrects the DH parameters (mechanism data).
- the operation control unit 121 controls the operation of the robot 1 in accordance with the corrected DH parameters (mechanism data) (step S206). This process prevents temperature-dependent fluctuations in the hand position of the robot 1, making it possible to control the robot with high precision.
- the mechanism error parameter correction process may be executed repeatedly at a constant cycle while the robot 1 is in operation, for example.
- the mechanism error parameters can be corrected at any time in response to temperature changes while the robot 1 is in operation, making it possible to operate the robot 1 with high accuracy.
- the mechanism error parameter correction process may be executed before the robot 1 is caused to perform a specified task.
- the mechanism error parameter correction process may be started by a command from the user via the teaching operation panel 30. In these cases as well, the positional accuracy of the robot 1 can be maintained at a high level.
- a data table created by monitoring the detection value of the motor temperature detector 2a as the temperature of each joint, and a data table created by monitoring the detection value of the torque sensor temperature detector 4a as the temperature of each joint may be prepared, and the mechanism error parameters may be corrected by using these two types of data tables in combination.
- the method for using the two types of data tables in combination may be the method (a1) or (a2) described above in the first embodiment.
- the temperature may be monitored at three or more locations for each joint, and the mechanism error parameters may be corrected using information (e.g., three or more data tables) that represents the deviation of each joint axis in response to temperature changes at these three or more locations.
- the temperature may be monitored at three or more of the elements (motor, reducer, encoder, torque sensor, arm) arranged corresponding to each joint, and the mechanism error parameters may be corrected using information that represents the deviation of each joint axis in response to temperature changes at these three or more elements.
- the above methods (a1) and (a2) can be adopted.
- FIG. 11 is a flowchart showing the data table creation process according to the second embodiment.
- each joint is initially at a reference temperature, and the temperature monitoring unit 122 starts monitoring the temperature of each joint.
- the measurement unit 123 (position information acquisition unit 125) issues a specific command to the robot 1 at the reference temperature, and measures the hand position of the robot 1 using the three-dimensional measurement device 90 (see FIG. 6).
- the measurement unit 123 (position information acquisition unit 125) performs such measurements for multiple commands, and collects data on the difference between the command position for the robot 1 and the measured hand position of the robot 1 (step S601).
- step S602 determines whether or not a temperature rise of a certain temperature has occurred for each joint (step S602).
- the process of step S502 is repeated until a temperature rise of a certain temperature (e.g., 5°C) is detected (S602: NO). If it is determined that a temperature rise of a certain temperature has occurred (S602: YES), the process proceeds to step S603.
- a temperature rise of a certain temperature e.g., 5°C
- step S603 in a state in which the temperature of each joint axis has risen by a certain temperature (e.g., 5°C) from the reference temperature, the measurement unit 123 (position information acquisition unit 125) issues a predetermined position command to the robot 1, as in step S601, and measures the hand position of the robot 1 using the three-dimensional measurement device 90.
- the measurement unit 123 position information acquisition unit 125
- the measurement unit 123 (calculation unit 126) then performs calculations to identify mechanism error parameters based on the collected data (step S603).
- the measurement unit 123 determines the deviation between the mechanism error parameter at the reference temperature obtained in step S601 and the mechanism error parameter at a constant temperature rise obtained in step S603, and records this in the data table (step S604). As a result, the deviation between the DH parameter at the reference temperature and the DH parameter at a constant temperature rise is recorded in the data table.
- the measurement unit 123 determines whether or not the deviation amount has been obtained for each of the predetermined temperature values for creating the data table (step S605). If the deviation amount has not been obtained for each of the predetermined temperature values (S605: NO), the process continues from step S602. If the deviation amount has been obtained for each of the predetermined temperature values (S605: YES), the data table is complete, and this process ends.
- step S602 of the data table creation process shown in FIG. 11 determines whether the temperature has dropped by a certain amount, and steps S603-S604 perform measurements after the temperature has dropped by a certain amount and calculations to identify the mechanism error parameters.
- a data table 86 as shown in FIG. 9 can be created. Note that, for the deviation amount for temperatures for which no measurement data is available in the data table 86, data may be interpolated using various data interpolation methods.
- the mechanism error parameter correction unit 127 can use the data table completed in this way to correct the mechanism error parameters as described above.
- the robot control device 20A can prevent the hand position of the robot 1 from changing due to temperature changes in each joint, and can maintain the positional accuracy of the robot with high precision. This also improves the quality of the robot system 100A as a production system.
- the mechanism error parameters are corrected using a data table (information representing temperature-dependent deviations of the mechanism error parameters) that is prepared in advance through measurements using the three-dimensional measuring device 90, so the processing required to maintain high accuracy of the robot's position can be performed instantaneously.
- a robot system 100B according to a third embodiment will be described.
- the equipment configuration of the robot system 100B according to the third embodiment is the same as that of the robot system 100 according to the first embodiment shown in Fig. 1, so the description of the equipment configuration will be omitted.
- the robot system 100B according to the third embodiment can maintain the positional accuracy of the robot 1 with high accuracy by correcting deviations due to temperature for both the mastering data 83 and the mechanism data (mechanism error parameters) 84.
- FIG. 12 shows a functional block diagram of a robot system 100B according to this embodiment.
- the robot control device 20B includes an operation control unit 121, a temperature monitoring unit 122, a measurement unit 123, a mastering data correction unit 124, and a mechanism error parameter correction unit 127.
- the measurement unit 123 can create both the data table 85 representing the temperature-dependent deviation amount of the mastering data and the data table 86 representing the temperature-dependent deviation amount of the mechanism error parameters by measurement.
- the procedures shown in Figures 7 and 11 can be used as the procedure for creating the data table representing the temperature-dependent deviation amount of the mastering data and the procedure for creating the data table representing the temperature-dependent deviation amount of the mechanism error parameters, respectively.
- both a data table 85 representing the temperature-dependent deviation amount of the mastering data and a data table 86 representing the temperature-dependent deviation amount of the mechanism error parameters are stored in the memory unit 22.
- more accurate mastering data can be obtained by applying the mechanism data (mechanism error parameters) identified by the measurement (S601 or S603) as described with reference to FIG. 11 to the calculation of the inverse kinematics of each axis angle from the hand position when creating the mastering data 83. More specifically, first, a data table showing the temperature-dependent deviation of the mechanism error parameters is obtained by the data table creation process shown in FIG. 11. Next, in the calculation of each axis angle from the hand position when generating the mastering data 83, the mechanism data (mechanism error parameters) corrected based on the data table is applied, taking into account the temperature of each axis at that time. This makes it possible to obtain more accurate mastering data.
- a more accurate data table 85 can be created by applying the mechanism data (mechanism error parameters) identified by the measurement described with reference to FIG. 11 when calculating the angular position of each axis by inverse kinematics. More specifically, a data table 86 indicating the temperature-dependent deviation of the mechanism error parameters is acquired by the data table creation process shown in FIG. 11. Next, when performing the data table creation process of FIG.
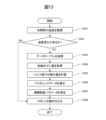
- FIG. 13 is a flowchart showing the parameter correction process in this embodiment. This process is executed under the control of the processor 21. When this process starts, the temperature monitoring unit 122 monitors the temperature of each joint (step S301).
- the temperature monitoring unit 122 determines whether or not a temperature change has occurred in each joint (step S302).
- step S302 If it is determined that there is no temperature change (S302: NO), the mastering data and mechanism error parameters are not corrected, and operation control of the robot 1 is executed (step S308).
- the mastering data correction unit 124 and the mechanism error parameter correction unit 127 refer to the data tables 85 and 86, respectively (step S303), and obtain the deviation in the angle of each joint axis in response to the temperature change, and the deviation in the mechanism error parameter of each joint axis in response to the temperature change (step S304).
- the mastering data correction unit 124 obtains a correction value by converting the acquired deviation in the angle of the joint into an encoder pulse value (step S305).
- the mastering data correction unit 124 corrects the mastering data using this correction value (step S306).
- the mechanism error parameter correction unit 127 corrects the mechanism error parameters using the deviation of the mechanism error parameters obtained from the data table 86 (step S307).
- the operation control unit 121 controls the operation of the robot 1 in accordance with the corrected mastering data and the mechanism error parameters (step S308). This process prevents fluctuations in the hand position of the robot 1 that are dependent on temperature changes, making it possible to control the robot with high precision.
- the mastering data may also be corrected by monitoring the temperature at two or more locations for each joint, and by using information (e.g., three or more data tables) that indicates the deviation of each joint axis in response to the temperature changes at these two or more locations.
- information e.g., three or more data tables
- the above methods (a1) and (a2) may also be adopted.
- the temperature of two or more locations for each joint may be monitored for correcting the mechanism error parameters, and the mechanism error parameters may be corrected by using information (e.g., three or more data tables) that indicates the deviation of each joint axis according to the temperature changes at these two or more locations.
- information e.g., three or more data tables
- the above methods (a1) and (a2) can be adopted.
- the mastering data correction unit 124 and the mechanism error parameter correction unit 127 correct the mastering data and the mechanism error parameters
- a method may be adopted in which, depending on the position of the joint axis, the part corresponding to the mastering data correction and the part corresponding to the mechanism error parameter correction are separated, as exemplified below.
- the second joint axis is handled by correcting the mechanism error parameters
- the wrist joint axis is handled by correcting the mastering data.
- the robot control device 20B may operate to correct either the mastering data or the mechanism error parameters.
- the robot control device 20B can prevent the hand position of the robot 1 from changing due to temperature changes in each joint, and can maintain the positional accuracy of the robot with high precision. This also improves the quality of the robot system 100B as a production system.
- At least one of the mastering data and the mechanism error parameters is corrected using a data table (information representing the temperature-dependent deviation of the angle of each joint axis, and information representing the temperature-dependent deviation of the mechanism error parameters) that is prepared in advance by measurements using the three-dimensional measuring device 90, so the processing required to maintain high accuracy of the robot's position can be performed instantly.
- a data table information representing the temperature-dependent deviation of the angle of each joint axis, and information representing the temperature-dependent deviation of the mechanism error parameters
- a motor temperature detector or a torque sensor temperature detector was used as a sensor for detecting the temperature of a single joint, but a sensor for detecting the temperature of another location within the joint, or a sensor for detecting the temperature of another element involved in driving the joint shaft, may also be used as a sensor for detecting the temperature of a single joint.
- a temperature detector is placed in each of the multiple joints that make up the robot 1, making it possible to monitor the temperature for each joint.
- this can have the effect of preventing the position of the robot's 1 hand from changing and maintaining the positional accuracy of the robot with high precision.
- the temperature of a specific joint of the robot can be monitored, and deviations due to temperature in parameters that indicate the mechanical characteristics of one or more joints of the robot can be corrected based on the temperature of that joint.
- the configuration for creating the data tables (85, 86) does not need to function. Therefore, when the robot system (100, 100A, 100B) has the data tables (85, 86) (i.e., when the robot system is in actual operation), the measurement unit 123 and the three-dimensional measurement device 90 may be omitted.
- the functional blocks in the functional block diagrams of the robot control device shown in each of the above-mentioned embodiments may be realized by one or more processors of the robot control device executing various software stored in a storage device, or may be realized by a configuration mainly based on hardware such as an ASIC (Application Specific Integrated Circuit).
- ASIC Application Specific Integrated Circuit
- the programs that execute various processes such as the mastering data correction process, mechanism error parameter correction process, parameter correction process, and data table creation process in the above-mentioned embodiments can be recorded on various computer-readable recording media (for example, semiconductor memories such as ROM, EEPROM, and flash memory, magnetic recording media, and optical disks such as CD-ROM and DVD-ROM).
- semiconductor memories such as ROM, EEPROM, and flash memory
- magnetic recording media for example, magnetic recording media, and optical disks such as CD-ROM and DVD-ROM.
- each embodiment makes it possible to prevent the position of the robot's hand from changing due to temperature changes in each joint, and to maintain the positional accuracy of the robot with high precision.
- the parameter storage unit stores mastering data as the parameters;
- the information storage unit stores, as the information representing the deviation, first information representing a deviation depending on a temperature for an angle of each of the joint axes of the one or more joints;
- the parameter storage unit stores a mechanism error parameter as the parameter
- the information storage unit stores, as the information representing the deviation, second information representing a deviation depending on a temperature for the mechanical error parameter of each of the joint axes of the one or more joints
- the parameter storage unit stores mastering data and mechanism error parameters as the parameters;
- the information storage unit stores, as the information representing the deviation, first information representing a deviation depending on temperature for an angle of each joint axis of the one or more joints, and second information representing a deviation depending on temperature for the mechanical error parameter of each joint axis of the one or more joints;
- the temperature monitoring unit (122) monitors temperatures at two or more locations in each of the one or more joints; the information storage unit stores two or more pieces of information each representing a deviation depending on temperature at each of the two or more locations for the parameter;
- a method executed in a control device (20, 20A, 20B) of a robot comprising: monitoring a temperature of one or more joints of the robot; obtaining information representative of a temperature-dependent deviation of a parameter indicative of a mechanical property of a joint axis of the one or more joints;
- a parameter correction method comprising: correcting the parameters in response to temperature changes of the one or more monitored joints based on information representative of the deviation.
- Appendix 11 A program for execution on at least one computer, monitoring a temperature of one or more joints of the robot; obtaining information representative of a temperature-dependent deviation of a parameter indicative of a mechanical property of a joint axis of the one or more joints; and correcting the parameter in response to a temperature change of the one or more monitored joints based on information representative of the deviation.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Numerical Control (AREA)
- Manipulator (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025538110A JPWO2025027787A1 (https=) | 2023-08-01 | 2023-08-01 | |
| CN202380100694.3A CN121548486A (zh) | 2023-08-01 | 2023-08-01 | 控制装置、参数校正方法以及程序 |
| PCT/JP2023/028110 WO2025027787A1 (ja) | 2023-08-01 | 2023-08-01 | 制御装置、パラメータ補正方法およびプログラム |
| DE112023006429.6T DE112023006429T5 (de) | 2023-08-01 | 2023-08-01 | Steuervorrichtung, Parameterkorrekturverfahren und Programm |
| TW113124505A TW202506357A (zh) | 2023-08-01 | 2024-07-01 | 控制裝置、參數補正方法及程式 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/028110 WO2025027787A1 (ja) | 2023-08-01 | 2023-08-01 | 制御装置、パラメータ補正方法およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025027787A1 true WO2025027787A1 (ja) | 2025-02-06 |
Family
ID=94394831
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/028110 Pending WO2025027787A1 (ja) | 2023-08-01 | 2023-08-01 | 制御装置、パラメータ補正方法およびプログラム |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JPWO2025027787A1 (https=) |
| CN (1) | CN121548486A (https=) |
| DE (1) | DE112023006429T5 (https=) |
| TW (1) | TW202506357A (https=) |
| WO (1) | WO2025027787A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102889582B1 (ko) * | 2025-04-04 | 2025-11-21 | 주식회사 브릴스 | 협동 로봇의 관절별 백래쉬 보상 알고리즘을 이용한 정밀 모션 캘리브레이션 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6528913B1 (ja) * | 2018-02-26 | 2019-06-12 | 三菱電機株式会社 | 補正関数生成装置、ロボット制御システム及びロボットシステム |
| JP2020121383A (ja) * | 2019-01-31 | 2020-08-13 | ファナック株式会社 | ロボット制御装置 |
| WO2023047591A1 (ja) * | 2021-09-27 | 2023-03-30 | ファナック株式会社 | 機構誤差パラメータを較正する較正装置および機構誤差パラメータの較正の必要性を判定する判定装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100264247B1 (ko) | 1998-03-28 | 2000-08-16 | 김영삼 | 공작기계의 열변형오차 측정 및 보정시스템 |
| JP6990120B2 (ja) | 2018-02-23 | 2022-01-12 | 川崎重工業株式会社 | ロボット制御装置 |
-
2023
- 2023-08-01 JP JP2025538110A patent/JPWO2025027787A1/ja active Pending
- 2023-08-01 DE DE112023006429.6T patent/DE112023006429T5/de active Pending
- 2023-08-01 WO PCT/JP2023/028110 patent/WO2025027787A1/ja active Pending
- 2023-08-01 CN CN202380100694.3A patent/CN121548486A/zh active Pending
-
2024
- 2024-07-01 TW TW113124505A patent/TW202506357A/zh unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6528913B1 (ja) * | 2018-02-26 | 2019-06-12 | 三菱電機株式会社 | 補正関数生成装置、ロボット制御システム及びロボットシステム |
| JP2020121383A (ja) * | 2019-01-31 | 2020-08-13 | ファナック株式会社 | ロボット制御装置 |
| WO2023047591A1 (ja) * | 2021-09-27 | 2023-03-30 | ファナック株式会社 | 機構誤差パラメータを較正する較正装置および機構誤差パラメータの較正の必要性を判定する判定装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102889582B1 (ko) * | 2025-04-04 | 2025-11-21 | 주식회사 브릴스 | 협동 로봇의 관절별 백래쉬 보상 알고리즘을 이용한 정밀 모션 캘리브레이션 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202506357A (zh) | 2025-02-16 |
| JPWO2025027787A1 (https=) | 2025-02-06 |
| DE112023006429T5 (de) | 2026-04-16 |
| CN121548486A (zh) | 2026-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112105484B (zh) | 机器人运动学参数自标定方法、系统及存储装置 | |
| CN108748159B (zh) | 一种机械臂工具坐标系自标定方法 | |
| US12257708B2 (en) | Robotic arm calibration method | |
| US20180229364A1 (en) | Robot system having learning control function and learning control method | |
| CN113365785B (zh) | 校准工业机器人的工具的方法、控制系统和工业机器人 | |
| CN108297101A (zh) | 多关节臂串联机器人末端位姿误差检测和动态补偿方法 | |
| JP5730614B2 (ja) | トルクセンサ校正装置、校正方法、及びプログラム | |
| WO2018196232A1 (zh) | 机器人和末端执行器的自动标定方法及系统 | |
| KR20080088165A (ko) | 로봇 캘리브레이션 방법 | |
| US11141855B2 (en) | Robot system, method of controlling robot arm, recording medium, and method of manufacturing an article | |
| JP3349652B2 (ja) | オフラインティーチング方法 | |
| WO2022025060A1 (ja) | ロボット制御装置 | |
| JP2011036956A (ja) | ロボットの精度調整方法およびロボット | |
| JP2019123073A (ja) | ロボットシステム、ロボットアームの制御方法、プログラム、記録媒体、及び物品の製造方法 | |
| WO2025027787A1 (ja) | 制御装置、パラメータ補正方法およびプログラム | |
| CN113799114A (zh) | 机器手臂的原点校正方法 | |
| JP7256932B1 (ja) | 教示装置 | |
| CN111136652B (zh) | 减速机系统及其制造、校正数据生成及校正方法、机器人 | |
| KR102826169B1 (ko) | 스프링 정수 보정 장치 및 그 방법 및 기록 매체 | |
| CN109968347B (zh) | 一种七轴机器人的零位标定方法 | |
| JP7641000B2 (ja) | ロボットの制御装置及び制御方法 | |
| JP5667437B2 (ja) | ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ | |
| US12594673B2 (en) | Method of calibrating manipulator, control system and robot system | |
| TWI746004B (zh) | 機器手臂的原點校正方法 | |
| JP2025030137A (ja) | ロボットシステムおよびパラメータ同定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23947584 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025538110 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112023006429 Country of ref document: DE |