WO2024241498A1 - シミュレータ、車両制御システム、及びシミュレーション方法 - Google Patents
シミュレータ、車両制御システム、及びシミュレーション方法 Download PDFInfo
- Publication number
- WO2024241498A1 WO2024241498A1 PCT/JP2023/019170 JP2023019170W WO2024241498A1 WO 2024241498 A1 WO2024241498 A1 WO 2024241498A1 JP 2023019170 W JP2023019170 W JP 2023019170W WO 2024241498 A1 WO2024241498 A1 WO 2024241498A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- simulation
- vehicle
- function
- driving assistance
- simulator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/36—Prevention of errors by analysis, debugging or testing of software
- G06F11/3698—Environments for analysis, debugging or testing of software
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/012—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from other sources than vehicle or roadside beacons, e.g. mobile networks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
Definitions
- driving assistance and autonomous driving functions In automobiles and other vehicles, the situations in which driving assistance and autonomous driving functions are actually used vary greatly depending on a combination of factors such as road shape, driving environment (from motorways with relatively few obstructions to urban areas with many obstructions and pedestrians), and weather. In all situations, driving assistance and autonomous driving functions must be developed to ensure safe driving.
- Patent Document 1 JP Patent Publication No. 2008-261991
- a safety evaluation device that includes a simulation means for simulating a vehicle accident by running a vehicle model, which is a model of a vehicle on a virtual road space, with a passenger virtually inside the vehicle, a prediction means for predicting the injury status of the passenger based on the occurrence of the vehicle accident simulated by the simulation means, and a display means for displaying the injury status predicted by the prediction means.
- the safety evaluation device described in Patent Document 1 simulates a vehicle accident by having an accident reproduction unit run a vehicle model on a virtual road space with occupants inside, and predicts the injury conditions of the occupants, but does not evaluate the performance of driving assistance functions or autonomous driving functions.
- the safety evaluation device described in Patent Document 1 executes a simulation only for the function to be evaluated, and does not execute a comparison simulation that is necessary to analyze the quality of the simulation execution results of the function to be evaluated. Therefore, additional work is required to analyze the performance merits and demerits of the function to be evaluated after the simulation is completed.
- the present invention aims to provide a simulation device for driving assistance functions and autonomous driving functions that can automatically perform a good/bad analysis of the performance of an application to be evaluated by performing at least one simulation of a comparison object in addition to a simulation of an application to be evaluated.
- a simulator for evaluating at least one of a driving assistance function and an automatic driving function of a vehicle is characterized by comprising: a reproduction scenario generation unit that reproduces and generates a scenario up to a point where at least one of the driving assistance function and the automatic driving function of the vehicle is activated or a point where an accident occurs for the vehicle based on the result of a traffic flow simulation that reproduces a traffic phenomenon occurring on a road in a virtual road space; an evaluation target simulation execution unit that executes a simulation using a first control parameter that activates at least one of the driving assistance function and the automatic driving function for the vehicle based on the generated reproduction scenario; a comparison simulation execution unit that executes a simulation using a second control parameter different from the first control parameter based on the generated reproduction scenario; and an operation proper/improper analysis unit that analyzes the proper operation of at least one of the driving assistance function and the automatic driving function of the vehicle based on the simulation result by the evaluation target simulation execution unit and the simulation result
- FIG. 1 is a block diagram showing an example of the overall configuration of a simulator 100 that has the function of analyzing the operation of at least one of a driving assistance function and an autonomous driving function.
- the simulator 100 shown in FIG. 1 is constructed as a single computer, but it may also operate on a virtual computer constructed on multiple physical computer resources. For example, parallel processing or division of processing by function may be used.
- the computer that constitutes the simulator 100 has a processor (CPU), memory, an auxiliary storage device, and a communication interface. This computer may also have an input/output interface.
- Memory includes ROM, which is a non-volatile storage element, and RAM, which is a volatile storage element.
- ROM stores unchanging programs (e.g., BIOS).
- RAM is a high-speed, volatile storage element such as DRAM (Dynamic Random Access Memory), and temporarily stores programs executed by the processor and data used when executing programs.
- the communication interface is a network interface device that controls communications with other devices according to a specified protocol.
- the input interface is an interface to which input devices such as a keyboard and mouse are connected and which receives input from an operator.
- the output interface is an interface to which output devices such as a display device and a printer (not shown) are connected and which outputs the results of program execution in a format that can be viewed by the operator. Note that a terminal connected via a network may provide the input interface and the output interface.
- the program executed by the processor is provided to the computer via removable media (CD-ROM, flash memory, etc.) or a network, and is stored in a non-volatile auxiliary storage device, which is a non-transitory storage medium. For this reason, the computer should have an interface for reading data from removable media.
- the simulator 100 generates a virtual space based on scenario parameters registered in a reproduction scenario database 103 generated by a reproduction scenario generation unit 102 using test results 101, and can perform a vehicle simulation within that virtual space.
- the test results 101 may be large-scale simulation log data or log data obtained during actual driving.
- Scenario parameters include, for example, spatial parameters such as the type and location of roads (shape, road surface condition), features (buildings, signs, trees, etc.), weather, time of day, etc., as well as parameters related to traffic participants such as the type, location, speed, etc. of vehicles, pedestrians, bicycles, etc.
- the reproduction scenario database 103 is a database in which scenario parameters are registered for each scenario.
- scenario parameters are registered for each scenario.
- FIG. 1 a method for generating a reproduction scenario based on the test results 101 is described, but a scenario using scenario parameters designed by the user without using the test results 101 may also be registered.
- the reproduction scenario generation unit 102 acquires information on scenario parameters required to generate a reproduction scenario from the contents of the log data of the test results 101, converts the information into a format that allows a simulation to be executed, and generates a database of reproduction scenarios (S201). For example, based on the results of a traffic flow simulation that reproduces traffic phenomena occurring on roads in a virtual road space, the reproduction scenario generation unit 102 creates a scenario that describes in chronological order the scenario parameters up to the point of operation of at least one of the vehicle's driving assistance function and autonomous driving function. Similarly, in order to reproduce the occurrence of a vehicle accident, the reproduction scenario generation unit 102 creates a scenario that describes in chronological order the scenario parameters up to the point of the accident.
- At least one control activation signal of the driving assistance function and the autonomous driving function recorded in the test result 101 and a time stamp Ta at that time are acquired.
- the period of one scenario to be generated is set based on the time stamp Ta. For example, if the start time of one scenario to be generated is T0 and the end time is T1, one scenario is generated so that the following relational expression (1) is satisfied. T0 ⁇ Ta ⁇ T1... (1) T0 and T1 can be freely determined depending on the purpose and application of the simulation.
- T0 and T1 may be a value obtained by adding a predetermined time Tb to Ta as shown in equation (2).
- a time that is set in advance within a range that satisfies formula (1) may be used.
- the evaluation target simulation execution unit 104 applies the reproduction scenario in the reproduction scenario database 103 to the virtual space and executes a simulation using a vehicle model equipped with the evaluation target software 105.
- the results of the simulation execution of the evaluation target software 105 are stored in the log 106 (S202).
- the software 105 to be evaluated is software that is implemented with at least one of a driving assistance function and an autonomous driving function, and includes at least one of a preceding vehicle following function, an automatic braking function or an automatic steering avoidance function for collision avoidance, and a lane departure prevention function.
- the analysis unit 107 is a function that analyzes the operation of at least one of the driving assistance function and the autonomous driving function in the software 105 to be evaluated and stores the analysis results in the analysis results database 114, and has a comparison simulation execution unit 108, a result comparison unit 111, and an operation operation analysis unit 112.
- the analysis unit 107 determines whether or not to run the analysis unit 107 depending on whether the user selects "with analysis” or “without analysis” when running the simulation (S203). If “with analysis” is selected, the execution of the analysis unit 107 continues, and if "without analysis” is selected, only the evaluation target simulation execution unit 104 is executed and the simulation is completed.
- the comparison simulation execution unit 108 executes a simulation using a vehicle model equipped with the result comparison software 109 in a virtual space under the same conditions (same reproduction scenario) as when the evaluation target simulation execution unit 104 executed the simulation (S204).
- the results of the simulation executed by the result comparison software 109 are stored in the log 110.
- the result comparison software 109 is software that implements at least one of the driving assistance functions and autonomous driving functions similar to those of the evaluation target software 105, and serves as a comparison subject for analyzing the performance of the evaluation target software 105.
- the result comparison software 109 is, for example, software before the control parameters (adjustment parameters such as control activation timing, control intervention amount, etc.) set in the evaluation target software 105 are changed. It may also be software in which parameters are set so that the control does not activate in the first place.
- the result comparison unit 111 compares the simulation results using the log 106 that stores the results of the simulation run by the evaluation target software 105 and the log 110 that stores the results of the simulation run by the result comparison software 109 (S205). For example, when focusing on a collision event, the result of whether or not there is a collision, the speed at the time of the collision, the collision position (fore, to the side, rear, etc. of the vehicle), and the control operation time of at least one of the driving assistance function and the autonomous driving function are compared.
- the operation quality analysis unit 112 analyzes the operation quality of at least one of the driving assistance function and the autonomous driving function implemented in the evaluation target software 105 according to the analysis rules 113 based on the comparison result of each simulation result by the result comparison unit 111 (S207).
- the analysis result database 114 stores the results of the analysis performed in step S207 (S208).
- step S209 it is determined whether there is a setting to execute multiple simulations for result comparison. If other result comparison software 109 is registered in the simulator 100, the processing of the analysis unit 107 described above (S204 to S208) is executed in the same manner.
- Analysis rules 113 are rules that define how to judge differences in comparison results. Some examples of analysis rules 113 are described below.
- FIG 3 is a diagram showing the definition of the analysis rule 113 related to the collision scenario.
- the collision scenario is a scenario included in the re-enactment scenario database 103, and is a scenario in which the vehicle and the target collide without the driving assistance function or the automatic driving function operating, or a scenario in which the vehicle and the target pass each other on the verge of colliding (without actually colliding).
- the comparison result of whether or not a collision occurred is used to determine whether the operation of at least one of the driving assistance functions and the autonomous driving functions of the evaluation target software 105 was "normal operation,” “abnormal operation,” “unnecessary operation,” or “determination based on the severity of the collision.”
- the operation of at least one of the driving assistance function and the automatic driving function of the evaluation target software 105 has improved performance compared to the operation of the driving assistance function and the automatic driving function of the result comparison software 109, so the analysis result is determined to be "normal operation.”
- the operation of at least one of the driving assistance functions and the automatic driving functions of the evaluation target software 105 is degraded in performance compared to the operation of the driving assistance functions and the automatic driving functions of the result comparison software 109, so the analysis result is determined to be "abnormal operation.”
- the primary analysis result is determined to be "determination based on the degree of collision,” and additional analysis is then performed.
- Figure 4 shows the definition of the rules for additional analysis when "determination based on the degree of collision" is determined. Below, an example of additional analysis using the table shown in Figure 4 is explained.
- the analysis result is determined to be "not operating” regardless of whether the result comparison software 109 operates the avoidance control.
- the collision speed of the own vehicle when it collides with the target is taken into consideration, if the collision speed in the evaluation software 105 is higher than the collision speed in the result comparison software 109, the collision damage is greater, there is insufficient intervention of collision avoidance control, and the analysis result is determined to be "performance degradation.” On the other hand, if the collision speed in the evaluation software 105 is lower than the collision speed in the result comparison software 109, the collision damage is reduced, and the analysis result is determined to be "performance improvement.”
- the collision position in the result comparison software 109 is near the bonnet of the own vehicle, but in the evaluation target software 105 it is near the location of the own vehicle's occupants (for example, near the driver's seat), the damage to the occupants will be great, and the analysis result will be determined to be "performance degradation.”
- FIG. 5 is a diagram showing the definition of the analysis rule 113 related to the lane keeping scenario.
- the lane keeping scenario is a scenario included in the re-enactment scenario database 103, and is a scenario for testing whether the vehicle can keep within the lane without deviating from the lane by controlling at least one of the driving assistance function and the autonomous driving function.
- the operation of at least one of the driving assistance functions and the automatic driving functions of the evaluation target software 105 is degraded in performance compared to the operation of at least one of the driving assistance functions and the automatic driving functions of the result comparison software 109, so the analysis result is determined to be "abnormal operation.”
- the primary analysis result is determined to be "Determination based on the degree of lane departure,” and additional analysis is continued.
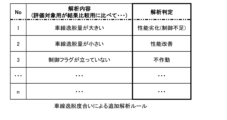
- Figure 6 shows the definition of the rules for additional analysis when "determination based on lane departure degree" is determined. Below, an example of additional analysis using the table shown in Figure 6 is explained.
- the analysis result is determined to be "performance degradation.”
- the amount of lane departure in the evaluation target software 105 is greater than the amount of lane departure in the result comparison software 109, there is insufficient steering correction intervention by at least one of the driving assistance function and the autonomous driving function, so the analysis result is determined to be "performance degradation.”
- the analysis result is determined to be "performance improvement.”
- the analysis result is determined to be "not activated” regardless of whether or not the avoidance control of the result comparison software 109 is activated.
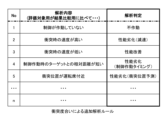
- Figure 7 shows the definition of the rules for additional analysis when "determination based on the degree of lane sway" is determined. Below, an example of additional analysis using the table shown in Figure 7 is explained.
- the control intervention of the evaluation target software 105 is excessive, and the analysis result is determined to be "performance degradation.”
- the maximum value of the lateral movement amount of the evaluation target software 105, Diff_trajectory_max is less than the maximum value of the lateral movement amount of the result comparison software 109, Diff_trajectory_max, then the analysis result is determined to be "performance improvement.”
- FIG. 8 is a diagram showing the definition of the analysis rule 113 for the merging scenario.
- the merging scenario is a scenario included in the reproduction scenario database 103, and is a scenario for testing whether the vehicle can smoothly merge onto a main road by controlling at least one of the driving assistance function and the autonomous driving function when merging onto a highway or a main road.
- analysis rule 113 is defined with the aim of realizing smooth merging without sudden deceleration when merging.
- the result of the result comparison software 109 is "sudden deceleration present" and the result of the evaluation target software 105 is "no sudden deceleration present," the performance of at least one of the driving assistance functions and the automatic driving functions of the evaluation target software 105 has improved, so the analysis result is determined to be "normal operation.”
- the operation of at least one of the driving assistance function and the automatic driving function of the evaluation target software 105 is appropriate, so the analysis result is determined to be "normal operation.”
- the result of the result comparison software 109 is "sudden deceleration occurred" and the result of the evaluation target software 105 is "sudden deceleration occurred,” it is possible that at least one of the driving assistance functions and the automatic driving functions of the evaluation target software 105 is at its functional limit, and since it is not possible to accurately determine whether or not the function is functioning properly, the primary analysis result is determined to be "judgment based on the degree of sudden deceleration,” and additional analysis is then performed.
- the analysis result is determined to be "performance degradation.”
- the maximum deceleration in the evaluation target software 105 is greater than the maximum deceleration in the result comparison software 109, smooth merging control is not possible, and the analysis result is determined to be "performance degradation.”
- the maximum deceleration in the evaluation target software 105 is less than the maximum deceleration in the result comparison software 109, the analysis result is determined to be "performance improvement.”
- the results of a large-scale simulation are automatically analyzed, reducing the amount of manual analysis work required and improving verification efficiency.
- a traffic flow simulation that virtually simulates real-world road environments and traffic participants can quickly perform long-term, long-distance driving tests that are required for actual vehicle testing, and the results can be analyzed by the simulator 100 of this embodiment to expose problems with the developed driving assistance functions and autonomous driving functions before mass production, reducing recalls.
- FIG. 10 shows an example of a vehicle control system in which a simulator 100 equipped with the analysis functions described above is installed on a management server 115 to provide a variety of services related to at least one of driving assistance functions and autonomous driving functions.
- the management server 115 has a simulator 100 having the analysis function of the present invention, an information generation unit 116 that uses the results to generate information to be distributed to service destinations (actual vehicles, insurance services, etc.), an information transmission unit 117 that distributes information to the service destinations, an information reception unit 118 that acquires information required for service provision, and a vehicle information database 123 that stores the information acquired by the information reception unit 118.
- service destinations actual vehicles, insurance services, etc.
- an information transmission unit 117 that distributes information to the service destinations
- an information reception unit 118 that acquires information required for service provision
- a vehicle information database 123 that stores the information acquired by the information reception unit 118.
- the information generation unit 116 shown in FIG. 10 has an improvement rate calculation unit 119 and a fault ratio calculation unit 120, and generates information to be distributed from the management server 115. In addition to the information described above, the information generation unit 116 may generate various information according to the service provision destination.
- the improvement rate calculation unit 119 calculates the improvement rate by comparing the results of the evaluation target software 105 analyzed by the simulator 100 with the results of the result comparison software 109.
- the improvement rate can be calculated as the ratio of the number of scenarios that obtained improved results to the total number of scenarios executed. For example, if there are 1000 total executed scenarios and performance improvement results were obtained in 100 of the executed scenarios, the improvement rate is 10%. On the other hand, if there are 1000 total executed scenarios and performance degradation results were obtained in 100 of the executed scenarios, the improvement rate is -10%.
- the improvement rate may be calculated by combining the overall results of the evaluated scenarios, or may be calculated for each category of the evaluated scenarios (collision scenarios, lane keeping scenarios, merging scenarios, etc.). Based on this improvement rate information, it is possible to select target vehicles when distributing the evaluation target software 105 to actual vehicles, thereby improving the quality of software update services for driving assistance functions and autonomous driving functions.
- the fault ratio calculation unit 120 calculates information that contributes to the calculation of the fault ratio, which serves as an index when a car accident occurs. For example, when a car accident occurs with the vehicle's driving assistance function or autonomous driving function activated, an index is obtained that determines whether the accident was avoidable or not. This is done by setting control parameters in the result comparison software 109 that turn off both the driving assistance function and the autonomous driving function, and then performing a simulation, making it possible to determine whether the accident occurred due to at least one of the driving assistance function and the autonomous driving function that was activated.
- the vehicle speed at the time of collision in the comparison simulation (with both driving assistance functions and autonomous driving functions OFF) is 40 km/h
- the vehicle speed at the time of collision in the evaluation simulation (with at least one of the driving assistance functions and autonomous driving functions ON) is also 40 km/h
- the driving assistance functions and autonomous driving functions were not the cause of the accident, and the fault ratio of the manufacturer of the driving assistance functions and autonomous driving functions is set low.
- the software update information acquisition unit 121 selects a target for updating software related to at least one of the driving assistance function and the autonomous driving function.
- the target for the software update may be selected using the improvement rate for each scenario calculated by the improvement rate calculation unit 119 and the vehicle information stored in the vehicle information database 123 that accumulates the information acquired by the information receiving unit 118.
- the transmission unit 122 transmits software to the vehicle selected as the target for the software update.
- the improvement rate calculation unit 119 may calculate an overall improvement rate based on the simulation analysis results of all scenarios, and the transmission unit 122 may transmit software with an improvement rate equal to or greater than a predetermined value to all vehicles.
- the transmission unit 122 may transmit software with an improvement rate equal to or greater than a predetermined value to all vehicles.
- software in which improvement has been seen in a collision scenario vehicles traveling in urban areas or areas with heavy traffic congestion may be selected as update targets using vehicle information (driving location, planned driving route, locations with frequent near misses, etc.) acquired by the information receiving unit 118, and the transmission unit 122 may transmit the software in which improvement has been seen to these selected vehicles.
- Vehicles to be subject to software updates may be selected based on the age and degree of deterioration of the vehicle, which are calculated based on the vehicle identification number and sensor data of the vehicle stored in the vehicle information database 123. If at least one piece of software for driving assistance functions and autonomous driving functions tuned to match deterioration due to aging is evaluated by the simulator 100 of this embodiment and there are no problems with the performance analysis results, the process of distributing the software to the aging vehicle can be easily executed.
- information on whether the accident was caused by the driving assistance function and the autonomous driving function, calculated by the fault ratio calculation unit 120, may be transmitted from the transmission unit 122 to, for example, an insurance company.
- the information transmission unit 117 in FIG. 10 illustrates the vehicle as an example of the transmission destination, but may transmit to the insurance company's server, or may transmit to the insurance company via vehicle communication.
- the present invention is not limited to the above-described embodiments, but includes various modified examples and equivalent configurations within the spirit of the appended claims.
- the above-described embodiments have been described in detail to clearly explain the present invention, and the present invention is not necessarily limited to having all of the configurations described.
- part of the configuration of one embodiment may be replaced with the configuration of another embodiment.
- the configuration of another embodiment may be added to the configuration of one embodiment.
- part of the configuration of each embodiment may be added, deleted, or replaced with other configurations.
- each of the configurations, functions, processing units, processing means, etc. described above may be realized in part or in whole in hardware, for example by designing them as integrated circuits, or may be realized in software by a processor interpreting and executing a program that realizes each function.
- Information such as programs, tables, and files that realize each function can be stored in a storage device such as a memory, hard disk, or SSD (Solid State Drive), or in a recording medium such as an IC card, SD card, or DVD.
- a storage device such as a memory, hard disk, or SSD (Solid State Drive)
- a recording medium such as an IC card, SD card, or DVD.
- control lines and information lines shown are those considered necessary for explanation, and do not necessarily represent all control lines and information lines necessary for implementation. In reality, it is safe to assume that almost all components are interconnected.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Evolutionary Computation (AREA)
- Geometry (AREA)
- Quality & Reliability (AREA)
- Traffic Control Systems (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/019170 WO2024241498A1 (ja) | 2023-05-23 | 2023-05-23 | シミュレータ、車両制御システム、及びシミュレーション方法 |
| DE112023005489.4T DE112023005489T5 (de) | 2023-05-23 | 2023-05-23 | Simulator, fahrzeugsteuersystem und simulationsverfahren |
| JP2025521699A JPWO2024241498A1 (https=) | 2023-05-23 | 2023-05-23 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/019170 WO2024241498A1 (ja) | 2023-05-23 | 2023-05-23 | シミュレータ、車両制御システム、及びシミュレーション方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024241498A1 true WO2024241498A1 (ja) | 2024-11-28 |
Family
ID=93589145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/019170 Ceased WO2024241498A1 (ja) | 2023-05-23 | 2023-05-23 | シミュレータ、車両制御システム、及びシミュレーション方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2024241498A1 (https=) |
| DE (1) | DE112023005489T5 (https=) |
| WO (1) | WO2024241498A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009169912A (ja) * | 2008-01-21 | 2009-07-30 | Toyota Central R&D Labs Inc | 交通流シミュレーションシステム |
| JP2009282702A (ja) * | 2008-05-21 | 2009-12-03 | Toyota Central R&D Labs Inc | 運転支援装置 |
| WO2020031652A1 (ja) * | 2018-08-10 | 2020-02-13 | 日立オートモティブシステムズ株式会社 | 情報処理装置、車両制御方法、情報処理システム |
-
2023
- 2023-05-23 JP JP2025521699A patent/JPWO2024241498A1/ja active Pending
- 2023-05-23 DE DE112023005489.4T patent/DE112023005489T5/de active Pending
- 2023-05-23 WO PCT/JP2023/019170 patent/WO2024241498A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009169912A (ja) * | 2008-01-21 | 2009-07-30 | Toyota Central R&D Labs Inc | 交通流シミュレーションシステム |
| JP2009282702A (ja) * | 2008-05-21 | 2009-12-03 | Toyota Central R&D Labs Inc | 運転支援装置 |
| WO2020031652A1 (ja) * | 2018-08-10 | 2020-02-13 | 日立オートモティブシステムズ株式会社 | 情報処理装置、車両制御方法、情報処理システム |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112023005489T5 (de) | 2025-12-04 |
| JPWO2024241498A1 (https=) | 2024-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Koopman et al. | Autonomous vehicles meet the physical world: RSS, variability, uncertainty, and proving safety | |
| JP7213704B2 (ja) | 自動運転プログラム評価システム、及び自動運転プログラム評価方法 | |
| Lee et al. | Impact of automated truck platooning on the performance of freeway mixed traffic flow | |
| CN110909419B (zh) | 一种汽车安全完整性能等级计算方法、装置及服务器 | |
| Moridpour et al. | Impact of heavy vehicles on surrounding traffic characteristics | |
| Nguyen et al. | Traffic conflict assessment for non-lane-based movements of motorcycles under congested conditions | |
| CN114077541A (zh) | 验证用于自动驾驶车辆的自动控制软件的方法和系统 | |
| US8930173B2 (en) | Vehicle behavior estimation device | |
| WO2022130019A1 (en) | Vehicle operation safety model test system | |
| Talebpour et al. | Near-crash identification in a connected vehicle environment | |
| US11354458B1 (en) | Automated vehicle safety simulation using safety quotient method | |
| CN113734204A (zh) | 用于评价自动驾驶功能的适用性的方法和设备 | |
| JP7470213B2 (ja) | 情報生成装置 | |
| Romo et al. | Identifying precrash factors for cars and trucks on interstate highways: mixed logit model approach | |
| Christ | Simulating the relative influence of tire, vehicle and driver factors on forward collision accident rates | |
| Klunder et al. | Traffic flow impacts of adaptive cruise control deactivation and (Re) activation with cooperative driver behavior | |
| JP2022172469A (ja) | 重要性能評価指標(kpi)によるテストすべき少なくとも部分的に自律的な走行機能のシナリオベースのテストおよび/またはホモロゲーションのためのコンピュータ実装方法 | |
| Aghabayk et al. | Including heavy vehicles in a car‐following model: modelling, calibrating and validating | |
| Arcidiacono | ADAS virtual validation: ACC and AEB case study with IPG CarMaker | |
| Weijermars et al. | LEVITATE: road safety impacts of connected and automated vehicles | |
| McAvoy et al. | Simulator study of primary and precipitating factors in work zone crashes | |
| WO2024241498A1 (ja) | シミュレータ、車両制御システム、及びシミュレーション方法 | |
| Wang et al. | Comprehensive evaluation of behavioral competence of an automated vehicle using the Driving Assessment (DA) methodology | |
| Yue et al. | The crash avoidance effectiveness of advanced driver assistance systems in real-world environment | |
| US20250145167A1 (en) | Method and apparatus for verifying vehicle function, electronic device, and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23938464 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025521699 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025521699 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112023005489 Country of ref document: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 112023005489 Country of ref document: DE |