WO2024195805A1 - リーン車両用運転評価データ出力装置 - Google Patents
リーン車両用運転評価データ出力装置 Download PDFInfo
- Publication number
- WO2024195805A1 WO2024195805A1 PCT/JP2024/010843 JP2024010843W WO2024195805A1 WO 2024195805 A1 WO2024195805 A1 WO 2024195805A1 JP 2024010843 W JP2024010843 W JP 2024010843W WO 2024195805 A1 WO2024195805 A1 WO 2024195805A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnitude
- data
- acceleration component
- driving
- evaluation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
Definitions
- This invention relates to a driving evaluation data output device for lean vehicles.
- Patent Document 1 discloses an information processing device that detects driving behavior, which is the behavior of a driver or a moving object, and predicts risks based on the detection results of the driving behavior.
- Patent Document 1 also discloses that the moving object includes motorcycles, bicycles, etc.
- Patent document 2 also discloses a method and system for detecting vehicle events and classifying them based on vehicle information.
- the method disclosed in patent document 2 also includes comparing vehicle movement data with vehicle performance requirements of multiple insurance company plans and notifying a vehicle operator when the vehicle data meets the vehicle performance requirements of any one of the insurance company plans.
- Patent document 2 also discloses that the method and system can be used for other vehicles, such as motorcycles.
- Patent Document 3 also discloses an insurance system that determines insurance premiums based on input driving data.
- the driving data includes data such as distance and driving behavior.
- the driving behavior includes at least one of lane changes, acceleration, and sudden acceleration.
- Patent Document 3 also discloses that the vehicle may be a motorcycle, a scooter, etc.
- Patent Document 4 also discloses a lean vehicle driving data processing device that generates economic loss-related data used for services related to economic losses in response to data indicating sudden movements of the vehicle body contained in lean vehicle driving data.
- the lean vehicle driving data processing device utilizes the fact that the driver's driving skills and driving tendencies are likely to be reflected in sudden movements of the vehicle body tilting to the left and right when the lean vehicle changes course, etc.
- the lean vehicle driving data processing device described in Patent Document 4 focuses on the sudden left-right tilt of the vehicle body that is unique to lean vehicles, and thereby improves the accuracy of economic loss-related data while increasing the design freedom of hardware resources compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the object of the present invention is to provide a driving evaluation data output device for a lean vehicle that satisfies the following four points.
- the first point is that it can output driving evaluation data specific to a lean vehicle from a perspective different from that of the lean vehicle driving data processing device described in Patent Document 4.
- the second point is that it can be used in combination with the lean vehicle driving data processing device described in Patent Document 4.
- the third point is that, like the lean vehicle driving data processing device described in Patent Document 4, it can improve the accuracy of the driving evaluation data for a lean vehicle compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the fourth point is that, like the lean vehicle driving data processing device described in Patent Document 4, it can improve the design freedom of hardware resources compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- lean vehicles tilt the body to the right when turning right and tilt the body to the left when turning left. Therefore, when turning the lean vehicle left or right, the driver performs an action of leaning the lean vehicle to turn it, and an action of raising the lean vehicle after the lean vehicle has finished turning. Since the lean vehicle has smaller left-right dimensions compared to four-wheel vehicles, the driver has a high degree of freedom in selecting the left-right driving position on the road surface. Therefore, the driver's driving skill and driving tendency are easily reflected in the lean vehicle driving data when the lean vehicle is turning left or right.
- the lean vehicle driving data processing device described in Patent Document 4 focuses on the sudden left-right tilt of the vehicle body when the lean vehicle turns left or right, and generates and outputs economic loss-related data.
- the lean vehicle driving data processing device described in Patent Document 4 improves the accuracy of economic loss-related data and increases the design freedom of hardware resources compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the left-right tilt angle of the vehicle body differs if the vehicle speed is different, even if the turning radius is the same.
- the driver can determine the left-right tilt angle of the vehicle body during turning by adjusting the balance between the centrifugal force due to the vehicle speed and the lateral force generated in the tires.
- the vehicle speed when turning left or right is one of the factors that the driver can select, so it is likely to reflect the driver's driving skill and driving tendency. Therefore, we focused on the turning radius and vehicle speed of the lean vehicle when turning left or right.
- the forces acting on the lean vehicle are as follows. Centrifugal force and gravity act on the center of gravity of the lean vehicle. Vertical reaction force and lateral force act on the contact surface of the tire. For example, when turning left, the centrifugal force acts to the right and the lateral force acts to the left with respect to the tire contact surface. For example, gravity acts downward and the vertical reaction force acts upward with respect to the tire contact surface.
- the centrifugal force and the lateral force are balanced, and the gravity and the vertical reaction force are balanced, the lean vehicle turns while leaning to the left at a predetermined angle of inclination.
- the left and right are reversed from the case described above.
- a lean vehicle can change the left-right tilt of the vehicle body by accelerating or decelerating when turning left or right. This is because accelerating increases the vehicle speed of the lean vehicle, which increases the centrifugal force. Also, decelerating decreases the vehicle speed of the lean vehicle, which decreases the centrifugal force.
- acceleration and deceleration when turning left or right are one of the factors that the driver can select, so they tend to reflect the driver's driving skill and driving tendency. Therefore, we focused on the horizontal acceleration component of the vehicle when the lean vehicle is turning left or right.
- a driving evaluation data output device for a lean vehicle may have the following configuration (1).
- the driving evaluation data output device for a lean vehicle has a memory that stores lean vehicle driving data, which is driving data of a lean vehicle, and a processor that outputs driving evaluation data including an evaluation regarding the driving of the driver of the lean vehicle based on the lean vehicle driving data stored in the memory.
- the processor may have the following configuration (a), (b), or (c) when the lean vehicle driving data includes data acquired while driving with the body of the lean vehicle tilted to the left when the lean vehicle makes a left turn and/or with the body of the lean vehicle tilted to the right when the lean vehicle makes a right turn.
- the processor outputs driving evaluation data that depends on the magnitude of the turning radius and the vehicle speed, but not on the magnitude of the horizontal acceleration component, based on both the turning radius and vehicle speed of the lean vehicle when the vehicle body is tilted in the left-right direction, so that the evaluation becomes lower as the vehicle speed increases for the same turning radius regardless of the magnitude of the horizontal acceleration component of the lean vehicle.
- the processor outputs driving evaluation data that depends on the magnitude of the horizontal acceleration component, but not on the turning radius and vehicle speed, based on both the front-to-rear acceleration component and the left-to-right acceleration component included in the horizontal acceleration component when the vehicle body is tilted in the left-to-right direction, so that the evaluation becomes lower as the magnitude of the left-to-right acceleration component increases for the same front-to-rear acceleration component regardless of the turning radius and vehicle speed, and so that the evaluation becomes lower as the magnitude of the front-to-rear acceleration component increases for the same left-to-right acceleration component.
- the processor outputs driving evaluation data that depends on the magnitude of the turning radius and vehicle speed and on the magnitude of the horizontal acceleration component, such that, based on both the turning radius and vehicle speed of the lean vehicle when the vehicle body is tilted in the left-right direction, the evaluation is lower the greater the vehicle speed for the same magnitude of turning radius regardless of the magnitude of the horizontal acceleration component of the lean vehicle, and based on both the forward-rearward acceleration component and the left-right acceleration component when the vehicle body is tilted in the left-right direction, the evaluation is lower the greater the magnitude of the left-right acceleration component for the same magnitude of forward-rearward acceleration component regardless of the magnitude of the turning radius and vehicle speed, and the evaluation is lower the greater the magnitude of the forward-rearward acceleration component for the same magnitude of left-right acceleration component.
- the configurations (a), (b), and (c) are all factors that the driver can select when turning a lean vehicle to the left or right, so the driver's driving skills and driving tendencies are easily reflected. Furthermore, the configurations (a), (b), and (c) are not interdependent, so data processing can be simplified and an increase in the data processing load can be suppressed. In addition, the configurations (a) and (b) can output driving evaluation data independently of each other. Therefore, the configurations (a) and (b) can be combined as in the configuration (c). Moreover, the focus is different from the sudden movement of the vehicle body tilting in the left and right direction.
- the dependency between factors may be a linear relationship.
- the dependency between factors may be a nonlinear relationship.
- the dependency between factors may be a step-like relationship.
- Configuration (b) may be applied not only to data when a lean vehicle is turning, but also to data when the lean vehicle is running in a straight line. This allows the driving evaluation data output device for a lean vehicle to output driving evaluation data not only when the lean vehicle is turning, but also when the vehicle is running in a straight line, which contains almost no lateral acceleration components. This makes it possible to further improve the accuracy of the driving evaluation data while suppressing an increase in the load of data processing.
- the driving evaluation data output device for a lean vehicle may have the following configuration (2) in addition to the above configuration (1).
- the processor outputs driving evaluation data that depends on the direction of the forward/backward acceleration component such that, for left/right acceleration components of the same magnitude, even if the magnitudes of the forward acceleration component and the rearward acceleration component are the same, the evaluation based on the rearward acceleration component is lower than the evaluation based on the forward acceleration component.
- Configuration (2) allows the driving evaluation data to be set in more detail in accordance with the fore-aft acceleration component while maintaining simple data processing. This allows the accuracy of the driving evaluation data to be improved while improving the design freedom of hardware resources.
- the driving evaluation data output device for a lean vehicle may also include the following configuration (3).
- (3) In the case of the configuration (a), when the processor defines a region that depends on the magnitude of the turning radius and the magnitude of the vehicle speed as a dependent region such that the evaluation is lowered as the vehicle speed increases for a turning radius of the same magnitude, and defines a region that does not depend on the magnitude of the turning radius and the magnitude of the vehicle speed as an independent region, the processor outputs driving evaluation data that depends on the magnitude of the turning radius and the magnitude of the vehicle speed based on at least the data of the dependent region.
- the processor when the processor defines a region that depends on the magnitude of the horizontal acceleration component as a dependent region such that the evaluation is lowered as the magnitude of the left-right acceleration component increases for a forward-backward acceleration component of the same magnitude, and the evaluation is lowered as the magnitude of the forward-backward acceleration component increases for a forward-backward acceleration component of the same magnitude, and defines a region that does not depend on the magnitude of the horizontal acceleration component as an independent region, the processor outputs driving evaluation data that depends on the magnitude of the horizontal acceleration component based on at least the data of the dependent region.
- the region that depends on the magnitude of the turning radius and the magnitude of the vehicle speed is defined as the first dependent region such that the evaluation is lower as the vehicle speed increases for the same magnitude of turning radius, and the region that does not depend on the magnitude of the turning radius and the magnitude of the vehicle speed is defined as the first independent region
- the region that depends on the magnitude of the horizontal acceleration component is defined as the second dependent region such that the evaluation is lower as the magnitude of the left-right acceleration component is larger for the same magnitude of forward-backward acceleration component, and the evaluation is lower as the magnitude of the front-rear acceleration component is larger for the same magnitude of left-right acceleration component
- driving evaluation data that depends on the magnitude of the turning radius and the magnitude of the vehicle speed and that depends on the magnitude of the horizontal acceleration component is output based on at least the data of the first dependent region and the second dependent region.
- the region of the lean vehicle driving data includes a dependent region and an independent region.
- the data in the dependent region is a region that has a high correlation with the driving evaluation data. Since the driving evaluation data is output based on at least the data in the dependent region, the accuracy of the driving evaluation data for the lean vehicle can be improved with less data. If the correlation between the driving evaluation data and the data in the independent region is low, the accuracy of the driving evaluation data can be improved with less data by excluding part or all of the data in the independent region. Note that if the accuracy of the driving evaluation data can be improved by using part or all of the data in the independent region, it may be used. The accuracy of the driving evaluation data can be improved with less data. Configuration (3) allows the amount of data used to be reduced by taking into account the correlation with the driving evaluation data, and the load on data processing to be reduced. Therefore, the accuracy of the driving evaluation data can be improved while further improving the design freedom of hardware resources.
- the driving evaluation data output device for a lean vehicle may have the following configuration (4) in addition to the configuration (1), (2), or (3).
- the processor outputs driving evaluation data that does not depend on the magnitude of the horizontal acceleration component but depends on the magnitude of the turning radius and the magnitude of the vehicle speed, using a map or function that specifies the relationship with the driving evaluation data, with at least the horizontal acceleration component not being a variable but the turning radius and the vehicle speed being variables.
- the processor outputs driving evaluation data that does not depend on the magnitude of the turning radius and the vehicle speed but depends on the magnitude of the horizontal acceleration component, using a map or function that specifies the relationship with the driving evaluation data, with at least the horizontal acceleration component not being a variable but the turning radius and the vehicle speed being variables.
- the driving evaluation data that depends on the magnitude of the turning radius and vehicle speed, and on the magnitude of the horizontal acceleration component is output using a map or function that specifies the relationship with the driving evaluation data, with at least the turning radius and vehicle speed as variables, but not the horizontal acceleration component, and a map or function that specifies the relationship with the driving evaluation data, with at least the turning radius and vehicle speed as variables, but not the horizontal acceleration component.
- the driving evaluation data is output using a map or function that specifies the relationship between the factors, which are variables that easily reflect the driving skills and driving tendencies of the driver of the lean vehicle, and the driving evaluation data. Therefore, more accurate driving evaluation data can be output by simple data processing. Therefore, the accuracy of the driving evaluation data can be further improved while improving the design freedom of the hardware resources.
- the map and function may be set in advance using the lean vehicle driving data. In this case, the map and function may be set using machine learning or AI (Artificial Intelligence). A part of the map and function may be corrected using the lean vehicle driving data used to output the driving evaluation data.
- the map and function may be in a form that is changed by machine learning or AI using the lean vehicle driving data used to output the driving evaluation data. In this case, the load of data processing increases, but the accuracy of the driving evaluation data can be further improved.
- the driving evaluation data output device for a lean vehicle may have the following configuration (5) in addition to the configuration (1), (2), (3) or (4).
- the processor When the lean vehicle driving data includes data acquired in multiple turning scenes, the processor generates multiple primary scores when the vehicle body is tilted in the left-right direction based on the multiple lean vehicle driving data, and outputs driving evaluation data that depends on the variance of the primary scores when the vehicle body is tilted in the left-right direction, such that the driving evaluation data output is lower as the variance of the multiple primary scores increases even if the average and/or median of the multiple primary scores are the same.
- lean vehicles have smaller lateral dimensions than four-wheel vehicles, the driver has greater freedom to select the lateral driving position on the road surface.
- lean vehicles When turning left or right, lean vehicles will have different lateral inclination angles of the vehicle body if the vehicle speed is different, even if the turning radius is the same.
- lean vehicles can change the lateral inclination of the vehicle body by accelerating or decelerating. The vehicle speed and acceleration when turning left or right are factors that the driver can select. Therefore, lean vehicle driving data tends to have a larger variance in data compared to four-wheel vehicles. Therefore, the variance of the primary score when turning left or right for the lean vehicle also tends to reflect the driver's driving skills and driving tendencies.
- the driving evaluation data not only depends on factors that are variables that tend to reflect the driving skills and driving tendencies of the driver of the lean vehicle, but also on the variance of the primary score that tends to reflect the driving skills and driving tendencies of the driver.
- the driving evaluation data can more strongly reflect levels, grades, differences, and changes. Therefore, the accuracy of the driving evaluation data can be further improved.
- the generation of the primary score and the calculation of its variance are simple data processing, and an increase in the load of data processing can be suppressed. Therefore, the accuracy of the driving evaluation data can be further improved while improving the design freedom of hardware resources.
- the driving evaluation data output device for a lean vehicle may have the following configuration (6) in addition to the configuration (1), (2), (3), (4) or (5).
- the processor outputs driving evaluation data that depends on the magnitude of the turning radius and the magnitude of the vehicle speed, such that the evaluation is lowered as the variance of the magnitude of the vehicle speed increases even if the average and/or median of the magnitude of the vehicle speed is the same for the same turning radius.
- the processor outputs driving evaluation data that depends on the magnitude of the horizontal acceleration component, such that the evaluation is lowered as the variance of the magnitude of the left-right acceleration component increases even if the average and/or median of the magnitude of the left-right acceleration component is the same for the same magnitude of the forward-backward acceleration component, and the evaluation is lowered as the variance of the magnitude of the forward-backward acceleration component increases for the same magnitude of the left-right acceleration component.
- the lean vehicle driving data includes data acquired in a plurality of turning scenes, and driving evaluation data is output that depends on the turning radius and the magnitude of the vehicle speed and on the magnitude of the horizontal acceleration component, such that the evaluation is lowered as the variance of the vehicle speed magnitude increases even if the average and/or median of the vehicle speed magnitude is the same for the same turning radius, the evaluation is lowered as the variance of the left-right acceleration component magnitude increases even if the average and/or median of the left-right acceleration component magnitude is the same for the same longitudinal acceleration component, and the evaluation is lowered as the variance of the left-right acceleration component magnitude increases even if the average and/or median of the left-right acceleration component magnitude is the same for the same longitudinal acceleration component.
- lean vehicles have smaller lateral dimensions than four-wheel vehicles, the driver has greater freedom to select the lateral driving position on the road surface.
- a lean vehicle When turning left or right, a lean vehicle will have a different lateral inclination angle of the vehicle body if the vehicle speed is different, even if the turning radius is the same.
- a lean vehicle can change the lateral inclination of the vehicle body by accelerating or decelerating when turning left or right.
- the vehicle speed and acceleration when turning left or right are factors that the driver can select. Therefore, lean vehicle driving data tends to have a larger variance in data compared to four-wheel vehicles. Therefore, the variance of factors that the driver can select when turning left or right with the lean vehicle also tends to reflect the driver's driving skill and driving tendency.
- the driving evaluation data depends not only on factors that are variables that tend to reflect the driving skills and driving tendencies of the driver of the lean vehicle, but also on the variance of factors that tend to reflect the driving skills and driving tendencies of the driver.
- the driving evaluation data can more strongly reflect levels, grades, differences, and changes. Therefore, the accuracy of the driving evaluation data can be further improved.
- the calculation of the variance of factors is a simple data process, and an increase in the load of data processing can be suppressed. Therefore, the accuracy of the driving evaluation data can be further improved while improving the design freedom of hardware resources.
- the variance of factors may be calculated as follows.
- it may be the variance of vehicle speeds or vehicle speed classes for the same turning radius or the same turning radius class.
- it may be the variance of horizontal acceleration components or classes of horizontal acceleration components.
- It may be the variance of left-right acceleration components or left-right acceleration components for the same forward-backward acceleration components.
- It may be the variance of forward-backward acceleration components or classes of forward-backward acceleration components for the same forward-backward acceleration components.
- it may be the variance of primary scores generated for multiple turning scenes.
- it may be the variance of multiple primary scores generated in one turning scene.
- it may be the variance of primary scores when multiple primary scores generated in one turning scene are collected for multiple turning scenes.
- connection As used herein, the terms “attached,” “connected,” “coupled,” and/or their equivalents are used broadly to encompass both “direct and indirect” attachments, connections, and couplings. Additionally, “connected” and “coupled” are not limited to physical or mechanical connections or couplings, but can include direct or indirect electrical connections or couplings.
- This specification describes an embodiment of a driving evaluation data output device for a lean vehicle according to the present invention.
- a lean vehicle is a vehicle that turns in a leaning posture.
- the lean vehicle is a vehicle that, in the left-right direction of the vehicle, leans to the left when turning left and leans to the right when turning right.
- the lean vehicle may be a vehicle for one person or a vehicle that can accommodate multiple people.
- the lean vehicle includes not only two-wheeled vehicles, but also all vehicles that turn in a leaning posture, such as three-wheeled or four-wheeled vehicles.
- the driving evaluation data is data that is set or evaluated so that the level, grade, difference, change, etc. of the driving evaluation data can be recognized, such as a numerical value or a grade.
- the driving evaluation data can be a numerical value between 0-100, GOOD/BAD/room for improvement, or grades such as A, B, and C, with A being a high grade.
- the number of grades can be set from a minimum of two stages.
- the driving evaluation data may also be economic loss-related data used for a service related to economic loss described in Patent Document 4.
- the economic loss-related data includes, for example, data related to insurance rates, assessment results, repayment risk prediction results, and the like.
- the driving evaluation data may be driving skill-related data or driving tendency-related data indicating the driver's driving skill or driving tendency.
- the driving evaluation data output in configuration (a) may be output as an acceleration evaluation, a deceleration evaluation, or an acceleration/deceleration evaluation.
- the driving evaluation data output in configuration (b) may be output as a turning speed evaluation.
- the driving evaluation data output in configuration (c) may be output as an overall evaluation.
- the driving evaluation data may be output as driving evaluation data that combines economic loss-related data used for the service related to economic loss described in Patent Document 4 with configuration (a), (b), or (c).
- the driving evaluation data may be output as driving evaluation data that combines economic loss-related data other than that in Patent Document 4 with configuration (a), (b), or (c).
- the direction of the lean vehicle and the direction of the vehicle body are defined as follows.
- the direction of the lean vehicle indicates the direction when the up-down direction of the lean vehicle is the vertical direction. Therefore, even if the lean vehicle tilts when turning, the horizontal direction of the lean vehicle does not change.
- the front-rear and left-right directions of the lean vehicle are included in the horizontal direction of the lean vehicle. Note that the direction of the vehicle body of the lean vehicle is different from the direction of the lean vehicle. When the lean vehicle is in an upright state where it is not tilted, the up-down direction of the vehicle body is the same as the up-down direction of the lean vehicle.
- the up-down direction of the vehicle body tilts relative to the vertical direction.
- the horizontal direction of the vehicle body tilts relative to the horizontal direction.
- the front-rear and left-right directions of the vehicle body are included in the horizontal direction of the vehicle body.
- the lean vehicle driving data stored in the memory may be data acquired from an IMU (Inertial Measuring Unit), a GPS (Global Positioning System), or a GNSS (Global Navigation Satellite System) mounted on the vehicle body, or an IMU, GPS, or GNSS in a portable device such as a smartphone carried by the driver.
- the lean vehicle driving data may be data generated by pseudo-generating signals from an IMU, GPS, or GNSS mounted on the vehicle body, or an IMU, GPS, or GNSS in a portable device such as a smartphone carried by the driver.
- the IMU may be, for example, a type equipped with a three-axis acceleration, a three-axis gyro, and a three-axis compass.
- the turning radius may be calculated using signals from an IMU, a GPS, a GNSS, or the like.
- the turning radius may be calculated, for example, from position information from a GPS.
- the turning radius may be calculated, for example, from a vehicle speed and a tilt angle calculated from an IMU.
- the vehicle speed may also be calculated using signals from an IMU, a GPS, a GNSS, or the like.
- the vehicle speed may be a vehicle speed detected by a vehicle speed sensor of a lean vehicle.
- the horizontal acceleration component is a composite acceleration component of the longitudinal acceleration component and the lateral acceleration component.
- the longitudinal acceleration component and the lateral acceleration component are included in the horizontal acceleration component.
- the horizontal acceleration component of a lean vehicle can be calculated from data such as an IMU, GPS, or GNSS mounted on the vehicle body, or an IMU, GPS, or GNSS of a portable device such as a smartphone carried by the driver.
- the longitudinal acceleration component or lateral acceleration component of a lean vehicle is considered to be included in the longitudinal acceleration component or lateral acceleration component of the vehicle body, so it may be substituted with the longitudinal acceleration component or lateral acceleration component of the vehicle body.
- the horizontal acceleration component of a lean vehicle may be substituted with an acceleration component in a direction on a plane perpendicular to the vertical direction of the vehicle body.
- the longitudinal acceleration component includes a forward acceleration component and/or a rearward acceleration component.
- the rearward acceleration component is the same as the longitudinal deceleration component of the lean vehicle.
- the forward acceleration component can be defined as positive data
- the backward acceleration component can be defined as negative data.
- the positive and negative of the data may be reversed.
- the left-right acceleration component includes a rightward acceleration component and/or a leftward acceleration component.
- the rightward acceleration component can be defined as positive data
- the leftward acceleration component can be defined as negative data.
- the positive and negative of the data may be reversed.
- the horizontal acceleration component may be calculated from the forward-backward acceleration component and the left-right acceleration component stored in the memory.
- the forward-backward acceleration component and the left-right acceleration component may be calculated from the horizontal acceleration component stored in the memory.
- the horizontal acceleration component may be calculated by differentiating the vehicle speed stored in the memory.
- the driving evaluation data output device for a lean vehicle may be a device mounted on a vehicle body.
- the driving evaluation data output device for a lean vehicle may be a portable device such as a smartphone carried by a driver.
- the driving evaluation data output device for a lean vehicle may include detectors such as an IMU, GPS, or GNSS, and may acquire lean vehicle driving data from the detector.
- the driving evaluation data output device for a lean vehicle may not include detectors such as an IMU, GPS, or GNSS, and may acquire lean vehicle driving data from another device equipped with a detector. A more specific example of outputting driving evaluation data is shown below.
- the driving evaluation data output device for a lean vehicle may output driving evaluation data that combines economic loss-related data used for a service related to economic loss described in Patent Document 4 with configuration (a), (b), or (c).
- the driving evaluation data output device for a lean vehicle may output driving evaluation data that combines economic loss-related data other than that of Patent Document 4 with configuration (a), (b), or (c).
- a driving evaluation data output device for a lean vehicle that satisfies the following four points.
- the first point is that it is possible to output driving evaluation data specific to a lean vehicle from a perspective different from that of the lean vehicle driving data processing device described in Patent Document 4.
- the second point is that it can be used in combination with the lean vehicle driving data processing device described in Patent Document 4.
- the third point is that, like the lean vehicle driving data processing device described in Patent Document 4, it is possible to improve the accuracy of the driving evaluation data for a lean vehicle compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the fourth point is that, like the lean vehicle driving data processing device described in Patent Document 4, it is possible to improve the design freedom of hardware resources compared to the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- FIG. 1 is a diagram showing an example of a schematic configuration of a driving evaluation data output device for a lean vehicle according to a first embodiment of the present invention, a diagram explaining forces acting on a lean vehicle, and an example of a combination of input data and output data.
- FIG. 2 is a diagram showing an example of a schematic configuration of a lean vehicle driving evaluation data output device according to the second embodiment.
- FIG. 3 is a flowchart showing an example of a lean vehicle driving evaluation data calculation method.
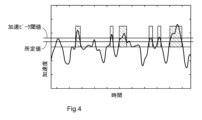
- FIG. 4 is a diagram showing an example of detection of acceleration during running of a lean vehicle.
- FIG. 5 is a diagram showing an example of detection of deceleration during running of a lean vehicle.
- FIG. 1 is a diagram showing an example of a schematic configuration of a driving evaluation data output device for a lean vehicle according to a first embodiment of the present invention, a diagram explaining forces acting on a lean vehicle, and an example of a combination of input data and output data.
- FIG. 2
- FIG. 6 is a diagram showing an example of detection of turning during running of a lean vehicle.
- FIG. 7 is a diagram illustrating an example of a schematic configuration of a lean vehicle driving data analysis system according to the third embodiment.
- FIG. 8 is a flowchart showing an example of a lean vehicle driving evaluation data calculation method.
- the lean vehicle driving evaluation data output device 1 is a device that outputs driving evaluation data of a driver using lean vehicle driving data (hereinafter referred to as lean vehicle driving data) obtained when the driver drives a lean vehicle.
- the lean vehicle driving data is data related to the driving of the lean vehicle.
- the lean vehicle driving data is used when calculating the driving evaluation data.
- the lean vehicle driving data includes data that is likely to reveal differences in the driving skills of drivers of lean vehicles.
- the lean vehicle driving data includes, for example, the lean vehicle's speed (hereinafter also referred to as vehicle speed), longitudinal acceleration, longitudinal deceleration, lateral acceleration, movement trajectory, vehicle attitude (values related to roll, yaw or pitch, etc.).
- vehicle speed the lean vehicle's speed
- longitudinal acceleration longitudinal deceleration
- lateral acceleration movement trajectory
- vehicle attitude values related to roll, yaw or pitch, etc.
- the lean vehicle driving data includes data acquired while the lean vehicle is traveling with the body of the lean vehicle tilted to the left when the lean vehicle turns left, and/or with the body of the lean vehicle tilted to the right when the lean vehicle turns right.
- Centrifugal force and gravity act on the center of gravity of the lean vehicle.
- Vertical reaction force and lateral force act on the tire contact surface. For example, when turning left, centrifugal force acts to the right and lateral force acts to the left on the tire contact surface.
- gravity acts downward and vertical reaction force acts upward on the tire contact surface.
- the centrifugal force and lateral force are balanced and gravity and vertical reaction force are balanced, the lean vehicle turns left leaning at a specified angle.
- the left and right are reversed compared to the above case.
- the driving evaluation data output device 1 for a lean vehicle has a memory 20 and a processor 30.
- the driving evaluation data output device 1 for a lean vehicle may be a mobile terminal owned by the driver of the lean vehicle, or may be a processing device that acquires data via communication and performs calculations.
- the memory 20 stores lean vehicle driving data.
- the lean vehicle driving data is driving data when the lean vehicle is driving.
- the lean vehicle driving data may be acquired, for example, by a sensor.
- the lean vehicle driving evaluation data output device 1 may have a lean vehicle driving data acquisition unit that includes the sensor.
- the lean vehicle driving evaluation data output device 1 may acquire lean vehicle driving data from a sensor separate from the device.
- the sensor may be, for example, an angle sensor including a gyro sensor, an acceleration sensor, a six-axis inertial measurement unit (IMU), an image sensor, an infrared sensor, an ultrasonic sensor, a GPS, or other position detection device.
- the sensor may be any detection device capable of acquiring the lean vehicle driving data described above.
- the memory 20 may be a memory capable of temporary storage, or may be a storage medium such as a hard disk.
- the memory 20 may have any configuration as long as it is capable of storing lean vehicle driving data and data calculated by the processor 30.
- the memory 20 stores lean vehicle driving data. Note that the memory 20 may store data other than lean vehicle driving data.
- the processor 30 is an arithmetic processing device used in, for example, a computer.
- the processor 30 acquires data related to various information and stores it in the memory 20, and performs arithmetic processing using the data stored in the memory 20.
- the processor 30 uses the lean vehicle driving data stored in the memory 20 to output driving evaluation data when the driver drives a lean vehicle.
- the driving evaluation data may be stored in the memory 20 and output from the memory 20 based on the lean vehicle driving data.
- the driving evaluation data may be calculated by the processor 30 based on the lean vehicle driving data.
- the driving evaluation data may be calculated by another configuration and then output by the processor 30 based on the lean vehicle driving data.
- the driving evaluation data output by the processor 30 may be, for example, a score, points, A, B, or C, where A is a high grade, GOOD/BAD/room for improvement, or a level.
- the processor 30 has the following configuration.
- the processor 30 may have a configuration (a) for outputting driving evaluation data (z value in FIG. 1) based on data on the turning radius and vehicle speed of the lean vehicle when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lowered as the vehicle speed (y value in FIG. 1) increases for the same turning radius (x value in FIG. 1).
- the processor 30 may have a configuration (a) for outputting driving evaluation data that is dependent on the magnitude of the turning radius and the magnitude of the vehicle speed, independent of the magnitude of the horizontal acceleration component, based on both the turning radius and vehicle speed of the lean vehicle when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lowered as the vehicle speed increases for the same turning radius, regardless of the magnitude of the horizontal acceleration component of the lean vehicle.
- This allows the driving evaluation data to be output taking into account the relationship between the turning radius and vehicle speed of the lean vehicle.
- the processor 30 may have a configuration (b) that outputs driving evaluation data (z value in Figure 1) based on data on the forward/backward acceleration component and left/right acceleration component of the lean vehicle contained in the horizontal acceleration component when the body of the lean vehicle is tilted left/right, such that the evaluation is lowered as the magnitude of the left/right acceleration component (y value in Figure 1) is larger for the forward/backward acceleration component of the same magnitude (x value in Figure 1), and the evaluation is lowered as the magnitude of the forward/backward acceleration component (y value in Figure 1) is larger for the left/right acceleration component of the same magnitude (x value in Figure 1).
- the processor 30 may have a configuration (b) that outputs driving evaluation data that depends on the magnitude of the horizontal acceleration component, regardless of the turning radius and the vehicle speed, based on both the longitudinal acceleration component and the lateral acceleration component of the lean vehicle contained in the horizontal acceleration component when the body of the lean vehicle is tilted in the lateral direction, so that the evaluation is lowered as the magnitude of the lateral acceleration component increases for the same magnitude of the longitudinal acceleration component, and the evaluation is lowered as the magnitude of the longitudinal acceleration component increases for the same magnitude of the lateral acceleration component.
- This allows the driving evaluation data to be output taking into account not only the longitudinal acceleration of the lean vehicle but also the lateral acceleration during turning.
- the processor 30 may output driving evaluation data based on the data of the horizontal acceleration component, without separating the horizontal acceleration component into the longitudinal acceleration component and the lateral acceleration component, such that the evaluation is lower the greater the magnitude of the lateral acceleration component relative to the longitudinal acceleration component of the same magnitude, and the evaluation is lower the greater the magnitude of the longitudinal acceleration component relative to the lateral acceleration component of the same magnitude. In this way, the processor 30 may output driving evaluation data that is independent of the turning radius and the vehicle speed and that is dependent on the magnitude of the horizontal acceleration component.
- the processor 30 may have a configuration (c) that outputs driving evaluation data based on both the turning radius and vehicle speed of the lean vehicle when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lower the greater the vehicle speed for the same turning radius, and based on both the forward-backward acceleration component and the left-right acceleration component when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lower the greater the left-right acceleration component for the same forward-backward acceleration component, and the evaluation is lower the greater the forward-backward acceleration component for the same left-right acceleration component.
- the processor 30 may have a configuration (c) that outputs driving evaluation data that depends on the magnitude of the turning radius and the vehicle speed and on the magnitude of the horizontal acceleration component, based on both the turning radius and vehicle speed of the lean vehicle when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lowered as the magnitude of the vehicle speed increases for the same magnitude of the turning radius regardless of the magnitude of the horizontal acceleration component of the lean vehicle, and based on both the forward-rearward acceleration component and the left-right acceleration component when the body of the lean vehicle is tilted in the left-right direction, such that the evaluation is lowered as the magnitude of the left-right acceleration component increases for the same magnitude of the forward-rearward acceleration component regardless of the magnitude of the turning radius and the vehicle speed, and the evaluation is lowered as the magnitude of the forward-rearward acceleration component increases for the same magnitude of the left-right acceleration component.
- the configuration of this embodiment provides a driving evaluation data output device 1 for lean vehicles that can output driving evaluation data specific to lean vehicles from a different perspective than the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output device 1 for lean vehicles can be used in combination with the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output device 1 for lean vehicles can improve the accuracy of driving evaluation data more than the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the driving evaluation data output device 1 for lean vehicles can improve the design freedom of hardware resources more than the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- processor 30 When processor 30 has the above-mentioned configuration (b) or configuration (c), it may output driving evaluation data that depends on the direction of the forward/rearward acceleration component such that, for a left/right acceleration component of the same magnitude, even if the magnitudes of the forward acceleration component and the rearward acceleration component are the same, the evaluation based on the rearward acceleration component is lower than the evaluation based on the forward acceleration component.
- the processor 30 may define a region that depends on the turning radius and the vehicle speed as a dependent region so that the evaluation is lower for a given turning radius when the vehicle speed is higher, and define a region that does not depend on the turning radius and the vehicle speed as a non-dependent region, and output driving evaluation data that depends on the turning radius and the vehicle speed based on at least the data in the dependent region.
- the processor 30 may define a region that depends on the magnitude of the horizontal acceleration component as a dependent region such that the evaluation is lower the greater the magnitude of the left-right acceleration component relative to the same magnitude of the forward-rearward acceleration component, and the evaluation is lower the greater the magnitude of the forward-rearward acceleration component relative to the same magnitude of the left-right acceleration component, and may define a region that does not depend on the magnitude of the horizontal acceleration component as a non-dependent region.
- the processor 30 may output driving evaluation data that depends on the magnitude of the horizontal acceleration component based on at least the data of the dependent region.
- the processor 30 may output driving evaluation data that depends on the turning radius and the vehicle speed and that depends on the horizontal acceleration component, based on at least data from the first dependent region and the second dependent region, when the processor 30 defines a region that depends on the turning radius and the vehicle speed such that the evaluation is lowered as the vehicle speed increases for the same turning radius, and defines a region that does not depend on the turning radius and the vehicle speed as a first independent region, and when the processor 30 defines a region that depends on the horizontal acceleration component such that the evaluation is lowered as the vehicle speed increases for the same longitudinal acceleration component, and when the processor 30 defines a region that does not depend on the horizontal acceleration component as a second independent region, the processor 30 may output driving evaluation data that depends on the turning radius and the vehicle speed and that depends on the horizontal acceleration component, based on at least data from the first dependent region and the second dependent region.
- (Embodiment 2) 2 is a diagram showing a schematic configuration of a lean vehicle driving evaluation data output device 100 according to embodiment 2.
- the lean vehicle driving evaluation data output device 100 of this embodiment has a memory 20 and a processor 130.
- the same components as those of the lean vehicle driving evaluation data output device 1 of embodiment 1 are given the same reference numerals and will not be described below, and only the different components will be described below.
- the lean vehicle driving evaluation data output device 100 may or may not have a lean vehicle running data acquisition unit 10.
- the memory 20 stores lean vehicle driving data (shown as d1 in FIG. 2) and calculation reference data (shown as d2 in FIG. 2) used when calculating driving evaluation data using the lean vehicle driving data.
- the lean vehicle driving data may be acquired by the lean vehicle driving data acquisition unit 10, or may be acquired by a sensor not included in the lean vehicle driving evaluation data output device 100.
- the calculation reference data includes at least one of the following: reference data for calculating acceleration driving evaluation, reference data for calculating deceleration driving evaluation, or reference data for calculating cornering driving evaluation.
- the reference data for calculating the accelerated running evaluation is reference data used to calculate the accelerated running evaluation.
- the reference data for calculating the accelerated running evaluation is data for determining the accelerated running evaluation according to the relationship between the longitudinal acceleration component and the lateral acceleration component of a lean vehicle, for example.
- the reference data for calculating the accelerated running evaluation may be data in which the accelerated running evaluation decreases concentrically, with the longitudinal acceleration component being the vertical axis and the lateral acceleration component being the horizontal axis, such that the accelerated running evaluation decreases the further away from the origin.
- the reference data for calculating the accelerated running evaluation is data in which the higher the lateral acceleration component is for longitudinal acceleration components of the same magnitude, the lower the accelerated running evaluation, and the higher the longitudinal acceleration component is for lateral acceleration components of the same magnitude, the lower the accelerated running evaluation.
- the reference data for calculating the acceleration driving evaluation may be table data such as a matrix, contour line data, or threshold data.
- the reference data for calculating the acceleration driving evaluation may be a map or function that defines the relationship with the driving evaluation data using the longitudinal deceleration component and the lateral acceleration component contained in the horizontal acceleration component as variables. Note that the reference data for calculating the acceleration driving evaluation may be reference data that includes any parameters and has any data format, as long as it is reference data that can evaluate the acceleration of a lean vehicle.
- the deceleration travel evaluation calculation reference data is reference data used to calculate the deceleration travel evaluation.
- the deceleration travel evaluation calculation reference data is data that determines the deceleration travel evaluation according to the relationship between the longitudinal deceleration component and the lateral acceleration component of a lean vehicle, for example.
- the deceleration travel evaluation calculation reference data may be data in which the deceleration travel evaluation decreases concentrically, with the longitudinal deceleration component on the vertical axis and the lateral acceleration component on the horizontal axis, such that the deceleration travel evaluation decreases the further away from the origin.
- the deceleration travel evaluation calculation reference data is data in which the higher the lateral acceleration component is for longitudinal deceleration components of the same magnitude, the lower the deceleration travel evaluation, and the higher the longitudinal deceleration component is for lateral acceleration components of the same magnitude, the lower the deceleration travel evaluation.
- the reference data for calculating the deceleration driving evaluation may be table data such as a matrix, contour line data, or threshold data.
- the reference data for calculating the deceleration driving evaluation may be a map or function that defines the relationship with the driving evaluation data using the longitudinal deceleration component and the lateral acceleration component contained in the horizontal acceleration component as variables. Note that the reference data for calculating the deceleration driving evaluation may be reference data that includes any parameters and has any data format, as long as it is reference data that can evaluate the deceleration of a lean vehicle.
- the reference data for calculating the acceleration driving evaluation and the reference data for calculating the deceleration driving evaluation may be included in the same data.
- the reference data for calculating the acceleration driving evaluation and the reference data for calculating the deceleration driving evaluation may be included in the calculation reference data for calculating the driving evaluation in the horizontal acceleration component.
- the turning evaluation calculation reference data is reference data used to calculate the turning evaluation.
- the turning evaluation calculation reference data is data for determining the turning evaluation according to the relationship between the vehicle speed and the turning radius of a lean vehicle, for example.
- the turning evaluation calculation reference data may be data in which, when the vertical axis is the vehicle speed and the horizontal axis is the turning radius, the turning evaluation decreases as the vehicle speed increases for the same turning radius.
- the turning evaluation calculation reference data may have a rejection region (at least a part of a non-dependent region) in which the turning evaluation is not calculated in a region where the vehicle speed is equal to or less than a predetermined value.
- the turning evaluation calculation reference data may be table data such as a matrix, contour line data, or threshold data.
- the turning evaluation calculation reference data may be a map or function that specifies the relationship between the driving evaluation data and the turning radius and the vehicle speed as variables.
- the reference data for calculating the turning driving evaluation may be reference data that includes any parameters and has any data format, as long as it is reference data that can evaluate the turning of a lean vehicle.
- the processor 130 When the processor 130 has the configuration (a) in embodiment 1, it outputs driving evaluation data using the reference data for calculating the turning driving evaluation. That is, the processor 130 outputs driving evaluation data that does not depend on the magnitude of the horizontal acceleration component but depends on the magnitude of the turning radius and the magnitude of the vehicle speed, using a map or function that specifies the relationship with the driving evaluation data, with at least the horizontal acceleration component not being a variable but the turning radius and the vehicle speed being variables.
- the processor 130 When the processor 130 has the configuration (b) in embodiment 1, it outputs driving evaluation data using the reference data for calculating the acceleration driving evaluation and the reference data for calculating the deceleration driving evaluation. That is, the processor 130 outputs driving evaluation data that does not depend on the magnitude of the turning radius and the vehicle speed but depends on the magnitude of the horizontal acceleration component, using a map or function that specifies the relationship with the driving evaluation data, with at least the turning radius and the vehicle speed not being variables but the horizontal acceleration component being variables.
- the processor 130 When the processor 130 has the configuration (c) in embodiment 1, it outputs driving evaluation data using the reference data for calculating the turning driving evaluation, the reference data for calculating the accelerating driving evaluation, and the reference data for calculating the decelerating driving evaluation. That is, the processor 130 outputs driving evaluation data that depends on the magnitude of the turning radius and the vehicle speed and on the magnitude of the horizontal acceleration component, using a map or function that specifies the relationship with the driving evaluation data, with at least the turning radius and the vehicle speed as variables, but not the horizontal acceleration component, and a map or function that specifies the relationship with the driving evaluation data, with at least the turning radius and the vehicle speed as variables, but not the horizontal acceleration component.
- the processor 130 may calculate driving evaluation data using lean vehicle driving data. The following describes a case where the processor 130 has a configuration for calculating the driving evaluation data.
- the processor 130 may output the driving evaluation data stored in the memory 20 based on the lean vehicle driving data.
- the processor 130 may output driving evaluation data calculated by another configuration.
- the processor 130 has an individual evaluation calculation unit 131, a driving evaluation calculation unit 132, a driving evaluation data calculation unit 133, and an output unit 134.
- the individual evaluation calculation unit 131 uses the lean vehicle driving data and the calculation reference data stored in the memory 20 to calculate an individual evaluation for at least one of the lean vehicle's acceleration, deceleration, or turning.
- the individual evaluation calculation unit 131 calculates an individual acceleration running evaluation from the reference data for calculating the acceleration running evaluation, using the longitudinal acceleration and lateral acceleration included in the lean vehicle running data, for each acceleration during lean vehicle running.
- Each acceleration during lean vehicle running means each section (within the diagonal line frame in the figure) in which acceleration is detected during lean vehicle running, as shown in FIG. 4.
- a section in which the acceleration peak exceeds an acceleration peak threshold and the acceleration is equal to or greater than a predetermined value is detected as acceleration.
- the reference data for calculating the acceleration running evaluation includes contour map data
- the individual evaluation calculation unit 131 calculates the individual acceleration running evaluation based on the position of the longitudinal acceleration and lateral acceleration on the contour map.
- the individual evaluation calculation unit 131 calculates the individual accelerated driving evaluation using the reference data for calculating the accelerated driving evaluation, so that the evaluation is lower for higher left/right acceleration at the same magnitude of longitudinal acceleration, and the evaluation is lower for higher front/rear acceleration at the same magnitude of longitudinal acceleration.
- driving evaluation data is calculated that is not dependent on the magnitude of the turning radius and vehicle speed but on the magnitude of the horizontal acceleration component, so that the evaluation is lower for higher left/right acceleration at the same magnitude of longitudinal acceleration, and the evaluation is lower for higher front/rear acceleration at the same magnitude of longitudinal acceleration.
- the individual evaluation calculation unit 131 calculates an individual deceleration running evaluation from the reference data for calculating the deceleration running evaluation, using the longitudinal deceleration and lateral acceleration included in the lean vehicle running data, for each deceleration in the running of the lean vehicle.
- Each deceleration in the running of the lean vehicle means each section (within the diagonal line frame in the figure) in which deceleration is detected in the running of the lean vehicle, as shown in FIG. 5.
- a range in which the peak of the deceleration exceeds a deceleration peak threshold and the deceleration is equal to or greater than a predetermined value is detected as deceleration.
- the reference data for calculating the deceleration running evaluation includes data of a contour map
- the individual evaluation calculation unit 131 calculates the individual deceleration running evaluation based on the position of the longitudinal deceleration and lateral acceleration on the contour map.
- the individual evaluation calculation unit 131 calculates the individual deceleration driving evaluation using the deceleration driving evaluation calculation reference data, so that the evaluation is lower for higher left/right acceleration at the same magnitude of longitudinal deceleration and the evaluation is lower for higher longitudinal deceleration at the same magnitude of longitudinal acceleration.
- driving evaluation data is calculated that is not dependent on the magnitude of turning radius and vehicle speed but on the magnitude of the horizontal acceleration component, so that the evaluation is lower for higher left/right acceleration at the same magnitude of longitudinal deceleration and the evaluation is lower for higher longitudinal deceleration at the same magnitude of longitudinal acceleration.
- the individual evaluation calculation unit 131 calculates an individual turning driving evaluation from the reference data for calculating the turning driving evaluation, using the vehicle speed and turning radius included in the lean vehicle driving data for each turn during the driving of the lean vehicle.
- Each turn during the driving of the lean vehicle means each section detected as a turn on the driving trajectory of the lean vehicle as shown in FIG. 6.
- a turn is detected when the cumulative azimuth change is equal to or greater than a predetermined angle.
- the individual evaluation calculation unit 131 calculates the individual turning driving evaluation, for example, based on the speed relative to the turning radius.
- the individual evaluation calculation unit 131 calculates the individual turning driving evaluation so that even if the lean vehicle is traveling with the same turning radius, the evaluation is lower if the vehicle speed of the lean vehicle is higher.
- driving evaluation data is calculated that is not dependent on the magnitude of the horizontal acceleration component but is dependent on the magnitude of the turning radius and the magnitude of the vehicle speed so that even if the lean vehicle is traveling with the same turning radius, the evaluation is lower if the vehicle speed of the lean vehicle is higher.
- the same turning posture includes cases where lean vehicles run with the same turning radius.
- the same turning posture may be expressed by any parameter that indicates the state related to the posture of the lean vehicle when turning, such as when the roll angle or yaw angle of the lean vehicle is the same.
- the individual evaluation calculation unit 131 calculates the individual acceleration driving evaluation each time the above-mentioned acceleration is detected during the driving of the lean vehicle, calculates the individual deceleration driving evaluation each time the above-mentioned deceleration is detected, and calculates the individual turning driving evaluation each time the above-mentioned turning is detected.
- the detection of acceleration, deceleration, and turning described above may be performed by the processor 130, or may be performed by another computing device and the results input to the processor 130.
- the driving evaluation calculation unit 132 calculates at least one driving evaluation of acceleration, deceleration, or turning using the individual evaluations calculated by the individual evaluation calculation unit 131.
- the driving evaluation calculation unit 132 determines the deceleration driving evaluation to be a value smaller than the average value of the calculated multiple individual deceleration driving scores. Specifically, the driving evaluation calculation unit 132 determines the deceleration driving evaluation to be a value obtained by subtracting the variance from the average value of the multiple individual deceleration driving evaluations.
- the individual deceleration driving evaluation is lower as the longitudinal deceleration of the lean vehicle is greater. Therefore, the driving evaluation data calculated using the individual deceleration driving evaluation is also lower as the deceleration of the lean vehicle is greater. Therefore, the driving evaluation calculation unit 132 calculates the driving evaluation data using the lean vehicle driving data so that the second deceleration data group is evaluated lower between a first deceleration data group including a plurality of data related to the deceleration of the lean vehicle and a second deceleration data group including a plurality of other data related to the deceleration, the number of data related to the deceleration in a specified region having an average value the same as that of the first deceleration data group and greater than the average value, and the number of data related to the deceleration in the specified region in the first deceleration data group is greater than the number of data in the specified region in the first deceleration data group.
- the data related to deceleration is data related to deceleration obtained
- the driving evaluation calculation unit 132 determines the turning driving evaluation to be a value smaller than the average value of the calculated multiple individual turning driving evaluations. Specifically, the driving evaluation calculation unit 132 determines the turning driving evaluation to be a value obtained by subtracting the variance from the average value of the multiple individual turning driving evaluations.
- the driving evaluation calculation unit 132 calculates the driving evaluation data using the lean vehicle driving data so that the second speed data group is rated lower between a first speed data group including a plurality of data related to the lean vehicle's vehicle speed and a second speed data group including a plurality of other data related to the vehicle speed and having a greater number of data related to the speed in a specified region whose average value is the same as and greater than the first speed data group and whose average value is greater than the number of data in the specified region in the first speed data group.
- the driving evaluation data calculation unit 133 calculates driving evaluation data using the acceleration driving evaluation, the deceleration driving evaluation, and the turning driving evaluation, each calculated by the driving evaluation calculation unit 132.
- the driving evaluation data calculation unit 133 calculates driving evaluation data, for example, by adding the acceleration driving evaluation, the deceleration driving evaluation, and the turning driving evaluation at a predetermined ratio.
- the output unit 134 outputs the driving evaluation data calculated by the driving evaluation data calculation unit 133.
- the output unit 134 outputs the driving evaluation data to, for example, a mobile terminal or a display terminal having a display unit.
- the output driving evaluation data is displayed on the mobile terminal or the display terminal.
- the processor 130 may output the calculated driving evaluation as is, or may generate driving evaluation data by taking into account at least two of the acceleration driving evaluation, deceleration driving evaluation, and cornering driving evaluation, and output the driving evaluation data.
- the processor 130 When the lean vehicle driving data includes data acquired in a plurality of turning scenes, the processor 130 generates a plurality of primary scores when the body of the lean vehicle is tilted in the left-right direction based on the data acquired in the plurality of turning scenes in the lean vehicle driving data, and outputs driving evaluation data that depends on the variance of the primary scores when the body is tilted in the left-right direction such that the driving evaluation data output is lower as the variance of the plurality of primary scores increases even if the average and/or median of the plurality of primary scores is the same.
- the primary scores include at least one of the individual acceleration driving evaluation, the individual deceleration driving evaluation, or the individual turning driving evaluation. Therefore, the variance of the primary scores is likely to reflect the driver's driving skills and driving tendencies.
- the driving evaluation data depends not only on factors that are variables that tend to reflect the driving skills and driving tendencies of the driver of the lean vehicle, but also on the variance of the primary score that tends to reflect the driving skills and driving tendencies of the driver.
- the driving evaluation data can more strongly reflect levels, grades, differences, and changes. Therefore, the accuracy of the driving evaluation data can be further improved.
- the generation of the primary score and the calculation of its variance are simple data processing, and an increase in the load of data processing can be suppressed. Therefore, the accuracy of the driving evaluation data can be further improved while improving the design freedom of hardware resources.
- the lean vehicle driving data includes data acquired in a plurality of turning scenes, and outputs driving evaluation data that depends on the magnitude of the turning radius and the magnitude of the vehicle speed, such that the evaluation is lowered as the variance of the magnitude of the vehicle speed increases, even if the average and/or median of the magnitude of the vehicle speed is the same for the same turning radius.
- the lean vehicle driving data includes data acquired in a plurality of turning scenes, and outputs driving evaluation data that depends on the magnitude of the horizontal acceleration component such that, even if the average and/or median of the magnitude of the left-right acceleration component is the same for a forward-backward acceleration component of the same magnitude, the greater the variance of the magnitude of the left-right acceleration component, the lower the evaluation, and the greater the variance of the magnitude of the front-back acceleration component, the lower the evaluation, for a forward-backward acceleration component of the same magnitude.
- the lean vehicle driving data includes data acquired in a plurality of turning scenes, and outputs driving evaluation data that depends on the turning radius and the magnitude of the vehicle speed and on the magnitude of the horizontal acceleration component, such that the evaluation is lowered as the variance of the vehicle speed increases even if the average and/or median of the vehicle speed is the same for the same turning radius, the evaluation is lowered as the variance of the left-right acceleration component increases even if the average and/or median of the left-right acceleration component is the same for the same longitudinal acceleration component, and the evaluation is lowered as the variance of the left-right acceleration component increases even if the average and/or median of the left-right acceleration component is the same for the same longitudinal acceleration component, and the evaluation is lowered as the variance of the left-right acceleration component increases even if the average and/or median of the left-right acceleration component is the same for the same longitudinal acceleration component.
- the above configuration provides a driving evaluation data output device 100 for a lean vehicle that can output driving evaluation data specific to a lean vehicle from a different perspective than the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output device 100 for a lean vehicle can be used in combination with the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output device 100 for a lean vehicle like the lean vehicle driving data processing device described in Patent Document 4
- the driving evaluation data output device 100 for a lean vehicle like the lean vehicle driving data processing device described in Patent Document 4, can improve the design freedom of hardware resources more than the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the driving evaluation calculation unit 132 calculates the acceleration driving evaluation, deceleration driving evaluation, and turning driving evaluation, it is possible to accurately calculate the driving evaluation data by taking into account evaluations lower than the average value by using a value smaller than the average value of multiple individual acceleration driving evaluations, a value smaller than the average value of multiple individual deceleration driving evaluations, and a value smaller than the average value of multiple individual turning driving evaluations.
- Fig. 3 is a flowchart showing the method for calculating driving evaluation data for a lean vehicle.
- step SA1 the processor 30 acquires lean vehicle driving data (step SA1).
- step SA2 the processor 30 calculates driving evaluation data using the acquired lean vehicle driving data (step SA2).
- step SA3 the processor 30 outputs the calculated driving evaluation data (step SA3).
- step SA1 corresponds to the lean vehicle driving data acquisition step.
- Step SA2 corresponds to the driving evaluation data calculation step.
- Step SA3 corresponds to the driving evaluation data output step.
- step SA1 the lean vehicle driving data including data on the lean vehicle's acceleration in the left-right direction as well as the forward-rearward direction is acquired, and in step SA2, the driving evaluation data may be calculated using the lean vehicle driving data such that, for the same magnitude of forward-rearward acceleration, a higher left-right acceleration is evaluated lower, and, for the same magnitude of left-right acceleration, a higher forward-rearward acceleration is evaluated lower.
- step SA1 the lean vehicle driving data including data on not only the longitudinal deceleration of the lean vehicle but also the lateral acceleration is acquired, and in step SA2, the driving evaluation data may be calculated using the lean vehicle driving data such that a higher lateral acceleration at the same magnitude of longitudinal deceleration is evaluated lower, and a higher longitudinal deceleration at the same magnitude of lateral acceleration is evaluated lower.
- step SA1 the lean vehicle driving data including data on the turning posture of the lean vehicle and data on the speed of the lean vehicle is acquired, and in step SA2, the driving evaluation data may be calculated using the lean vehicle driving data so that the evaluation is lower when the lean vehicle is traveling at a higher speed even if the lean vehicle is traveling in the same turning posture.
- FIG. 7 is a diagram showing a schematic configuration of a lean vehicle driving evaluation data output system 1000 according to embodiment 3.
- the lean vehicle driving evaluation data output system 1000 of this embodiment has a mobile terminal 1001 and a server 1002.
- the same components as those in the lean vehicle driving evaluation data output device 1 of embodiment 1 are given the same reference numerals and will not be described below, and only the different components will be described.
- the mobile terminal 1001 has a mobile terminal side communication unit 1011 and a display unit 1012.
- the mobile terminal 1001 may have a memory. This memory may store lean vehicle driving data, data related to driving evaluation data, and the like.
- the mobile terminal 1001 may have a lean conductor driving data acquisition unit that acquires lean vehicle driving data. In this case, the lean vehicle driving data acquired by the mobile terminal 1001 is transmitted to the server 1002 via the mobile terminal side communication unit 1011 described later.
- the mobile terminal communication unit 1011 can transmit and receive data to and from a server side communication unit 1021 of the server 1002, which will be described later.
- the mobile terminal communication unit 1011 transmits lean vehicle driving data to the server 1002.
- the mobile terminal communication unit 1011 may receive data related to driving evaluation data from the server 1002.
- the mobile terminal communication unit 1011 may be, for example, a communication device such as an antenna provided within the mobile terminal 1001, or may be a communication device separate from the mobile terminal 1001.
- the display unit 1012 is, for example, a display screen provided on the mobile terminal 1001.
- the display unit 1012 can display driving evaluation data based on data received by the mobile terminal side communication unit 1011.
- the display unit 1012 may be a display device separate from the mobile terminal 1001.
- the server 1002 has a server-side communication unit 1021, a memory 20, and a processor 30.
- the server-side communication unit 1021 is capable of transmitting and receiving data to and from the mobile terminal-side communication unit 1011 of the mobile terminal 1001.
- the server-side communication unit 1021 is capable of receiving lean vehicle driving data from the mobile terminal-side communication unit 1011, and is capable of transmitting data related to driving evaluation data to the mobile terminal-side communication unit 1011 by the processor 30.
- the processor 30 may have a configuration similar to that of the processor 130 of embodiment 2, for example.
- the above configuration provides a driving evaluation data output system for lean vehicles that can output driving evaluation data specific to lean vehicles from a different perspective than the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output system for lean vehicles of this embodiment can be used in combination with the lean vehicle driving data processing device described in Patent Document 4.
- the driving evaluation data output system for lean vehicles of this embodiment like the lean vehicle driving data processing device described in Patent Document 4, can improve the accuracy of driving evaluation data more than the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the driving evaluation data output system for lean vehicles of this embodiment like the lean vehicle driving data processing device described in Patent Document 4, can improve the design freedom of hardware resources more than the vehicle driving data processing devices described in Patent Documents 1, 2, and 3.
- the mobile terminal 1001 of this embodiment may function as a lean vehicle driving evaluation data display terminal. That is, the mobile terminal side communication unit 1011 of the mobile terminal 1001 may function as a data communication unit of the lean vehicle driving evaluation data display terminal, and the display unit 1012 of the mobile terminal 1001 may function as a display unit of the lean vehicle driving evaluation data display terminal.
- the processor 30 may function as a calculation device.
- the display unit 1012 may display the driving evaluation data output by the processor 30 based on the lean vehicle driving data such that, for the same magnitude of forward/backward acceleration, the higher the left/right acceleration, the lower the evaluation, and, for the same magnitude of left/right acceleration, the higher the forward/backward acceleration, the lower the evaluation.
- the display unit 1012 may display the driving evaluation data output by the processor 30 based on the lean vehicle driving data such that, for the same magnitude of longitudinal deceleration, a higher lateral acceleration is evaluated lower, and, for the same magnitude of longitudinal acceleration, a higher lateral deceleration is evaluated lower.
- the display unit 1012 may display driving evaluation data output by the processor 30 based on the lean vehicle driving data so that a lean vehicle traveling at a higher speed is given a lower evaluation even if the lean vehicle travels with the same turning radius.
- Fig. 8 is a flowchart showing the method for calculating driving evaluation data for a lean vehicle.
- the mobile terminal 1001 acquires lean vehicle driving data (step SB1).
- the server 1002 acquires the lean vehicle driving data acquired in step SB1 from the mobile terminal 1001 (step SB2).
- the server 1002 calculates driving evaluation data using the lean vehicle driving data acquired in step SB2 (step SB3).
- the server 1002 outputs the driving evaluation data calculated in step SB3 (step SB4).
- Step SB1 corresponds to the lean vehicle driving data acquisition step.
- Step SB2 corresponds to the acquisition step.
- Step SB3 corresponds to the driving evaluation data calculation step.
- Step SB4 corresponds to the driving evaluation data output step.
- the lean vehicle driving data may include data other than the lean vehicle speed, longitudinal acceleration, longitudinal deceleration, lateral acceleration, movement trajectory, and vehicle attitude (such as values related to roll, yaw, or pitch).
- the driving evaluation calculation unit 132 calculates the driving evaluation (acceleration driving evaluation, deceleration driving evaluation, turning driving evaluation) by subtracting the variance from the average value of the multiple individual driving evaluations (individual acceleration driving evaluation, individual deceleration driving evaluation, individual cornering driving evaluation).
- the driving evaluation calculation unit may calculate the driving evaluation by considering any evaluation as long as the evaluation is lower than the average value of the multiple individual driving evaluations.
- the driving evaluation calculation unit may, for example, calculate the driving evaluation by considering an evaluation in a predetermined range lower than the average value.
- the driving evaluation data calculation unit 133 calculates the driving evaluation data by, for example, adding the acceleration driving evaluation, the deceleration driving evaluation, and the turning driving evaluation at a predetermined ratio.
- the driving evaluation data calculation unit may calculate the driving evaluation data using at least one of the acceleration driving evaluation, the deceleration driving evaluation, or the turning driving evaluation.
- the driving evaluation data calculation unit may also calculate the driving evaluation data using at least one of the individual acceleration driving evaluation, the individual deceleration driving evaluation, or the individual turning driving evaluation.
- the driving evaluation data calculation unit may calculate the driving evaluation data by any method as long as it calculates the driving evaluation data of the lean vehicle using an evaluation related to at least one of the acceleration, deceleration, or turning of the lean vehicle.
- the driving evaluation data calculation unit may also calculate overall driving evaluation data by taking into consideration at least one of the following: sudden acceleration, sudden deceleration, sudden course change, sudden leaning to turn, or sudden lifting after turning of a lean vehicle, from the driving evaluation data calculated as described above.
- the driving evaluation data calculation unit may calculate the overall driving evaluation data by taking into consideration the frequency of detecting at least one of the following: sudden acceleration, sudden deceleration, sudden course change, sudden leaning to turn, or sudden lifting after turning of a lean vehicle.
- the driving evaluation calculation unit 132 calculates the driving evaluation using the individual driving evaluation calculated by the individual driving evaluation calculation unit 131.
- the driving evaluation calculation unit may calculate the driving evaluation in at least one of the acceleration, deceleration, or turning of the lean vehicle by another method.
- the driving evaluation calculation unit may calculate the driving evaluation using lean vehicle driving data.
- the driving evaluation data calculation unit 133 calculates the driving evaluation data using the driving evaluation calculated by the driving evaluation calculation unit 132.
- the driving evaluation data calculation unit may calculate the driving evaluation data using the individual driving evaluation calculated by the individual driving evaluation calculation unit.
- the driving evaluation data calculation unit may calculate the driving evaluation data using lean vehicle driving data.
- Reference Signs List 1 100 Lean vehicle driving evaluation data output device 10 Lean vehicle driving data acquisition unit 20 Memory 30, 130 Processor 131 Individual evaluation calculation unit 132 Driving evaluation calculation unit 133 Driving evaluation data calculation unit 134 Output unit 1000 Lean vehicle driving evaluation data output system 1001 Mobile terminal 1002 Server 1011 Mobile terminal side communication unit 1012 Display unit 1021 Server side communication unit
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Traffic Control Systems (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2024241272A AU2024241272A1 (en) | 2023-03-20 | 2024-03-19 | Leaning vehicle driving evaluation data output device |
| JP2025508584A JPWO2024195805A1 (https=) | 2023-03-20 | 2024-03-19 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023043914 | 2023-03-20 | ||
| JP2023-043914 | 2023-03-20 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024195805A1 true WO2024195805A1 (ja) | 2024-09-26 |
Family
ID=92841739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/010843 Ceased WO2024195805A1 (ja) | 2023-03-20 | 2024-03-19 | リーン車両用運転評価データ出力装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2024195805A1 (https=) |
| AU (1) | AU2024241272A1 (https=) |
| WO (1) | WO2024195805A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020100267A1 (ja) * | 2018-11-15 | 2020-05-22 | ヤマハ発動機株式会社 | 鞍乗型車両走行データ処理装置および鞍乗型車両走行データ処理方法 |
| WO2020100333A1 (ja) * | 2018-11-15 | 2020-05-22 | ヤマハ発動機株式会社 | 鞍乗型車両走行データ処理装置、鞍乗型車両走行データ処理方法および鞍乗型車両走行データ処理プログラム |
| WO2023282181A1 (ja) * | 2021-07-07 | 2023-01-12 | ヤマハ発動機株式会社 | リーン車両走行データ処理装置 |
-
2024
- 2024-03-19 AU AU2024241272A patent/AU2024241272A1/en active Pending
- 2024-03-19 WO PCT/JP2024/010843 patent/WO2024195805A1/ja not_active Ceased
- 2024-03-19 JP JP2025508584A patent/JPWO2024195805A1/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020100267A1 (ja) * | 2018-11-15 | 2020-05-22 | ヤマハ発動機株式会社 | 鞍乗型車両走行データ処理装置および鞍乗型車両走行データ処理方法 |
| WO2020100333A1 (ja) * | 2018-11-15 | 2020-05-22 | ヤマハ発動機株式会社 | 鞍乗型車両走行データ処理装置、鞍乗型車両走行データ処理方法および鞍乗型車両走行データ処理プログラム |
| WO2023282181A1 (ja) * | 2021-07-07 | 2023-01-12 | ヤマハ発動機株式会社 | リーン車両走行データ処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2024241272A1 (en) | 2025-11-06 |
| JPWO2024195805A1 (https=) | 2024-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114906124B (zh) | 为了乘客舒适确定和动态地更新路线和驾驶风格的方法和系统 | |
| US12280797B2 (en) | Validation of trajectory planning for autonomous vehicles | |
| US11126763B1 (en) | Realism metric for testing software for controlling autonomous vehicles | |
| JP5060450B2 (ja) | 経路探索装置、経路探索方法、およびプログラム | |
| WO2021079494A1 (ja) | リーン車両走行状態データ出力装置及びリーン車両操縦技量判定装置 | |
| JP2010117839A (ja) | 車両運転支援装置及び車両運転支援プログラム | |
| JP7634095B2 (ja) | リーン車両走行データ処理装置 | |
| JP2017021519A (ja) | 運転評価装置およびナビゲーション装置 | |
| EP4215933A1 (en) | Generating a fused object bounding box based on uncertainty | |
| JP2018106490A (ja) | 自動運転装置 | |
| US20240102824A1 (en) | Moving object, control method of moving object, non-transitory computer-readable storage medium, and moving object control system | |
| WO2024195805A1 (ja) | リーン車両用運転評価データ出力装置 | |
| US20200355517A1 (en) | Control device and map generation method | |
| CN111959409B (zh) | 云台调节方法、存储介质、电子设备及车辆 | |
| JP7198742B2 (ja) | 自動運転車両、画像表示方法およびプログラム | |
| US20250191145A1 (en) | Stacked Image Processing to Reduce Blur for Autonomous Driving | |
| JP2024032849A (ja) | 情報処理装置、情報処理システム、情報処理方法及びプログラム | |
| US20220245974A1 (en) | Leaning-vehicle-real-time-information-presentation-control apparatus | |
| CN118323147A (zh) | 驾驶辅助方法、装置、设备、存储介质及程序产品 | |
| JP6891863B2 (ja) | 表示制御装置および表示制御プログラム | |
| KR102530702B1 (ko) | 자율 주행 장치 및 방법 | |
| TWI891174B (zh) | 行駛資料處理裝置、行駛資料計測裝置及行駛資料計測處理裝置 | |
| WO2022034735A1 (ja) | 位置推定システム | |
| US11904857B2 (en) | System for controlling a driving speed of a vehicle and a method thereof | |
| KR20240075429A (ko) | Imu 좌표계를 차량 좌표계와 정렬하는 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24774939 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025508584 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025508584 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: AU2024241272 Country of ref document: AU |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2024241272 Country of ref document: AU Date of ref document: 20240319 Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 24774939 Country of ref document: EP Kind code of ref document: A1 |