WO2024142207A1 - 飛行装置 - Google Patents
飛行装置 Download PDFInfo
- Publication number
- WO2024142207A1 WO2024142207A1 PCT/JP2022/048092 JP2022048092W WO2024142207A1 WO 2024142207 A1 WO2024142207 A1 WO 2024142207A1 JP 2022048092 W JP2022048092 W JP 2022048092W WO 2024142207 A1 WO2024142207 A1 WO 2024142207A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frame
- rotor
- engine
- frame member
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/16—Flying platforms with five or more distinct rotor axes, e.g. octocopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/40—Arrangements for mounting power plants in aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/40—Arrangements for mounting power plants in aircraft
- B64D27/402—Arrangements for mounting power plants in aircraft comprising box like supporting frames, e.g. pylons or arrangements for embracing the power plant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D33/00—Arrangement in aircraft of power plant parts or auxiliaries not otherwise provided for
- B64D33/08—Arrangement in aircraft of power plant parts or auxiliaries not otherwise provided for of power plant cooling systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U20/00—Constructional aspects of UAVs
- B64U20/90—Cooling
- B64U20/96—Cooling using air
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/24—Coaxial rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/29—Constructional aspects of rotors or rotor supports; Arrangements thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/29—Constructional aspects of rotors or rotor supports; Arrangements thereof
- B64U30/291—Detachable rotors or rotor supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/11—Propulsion using internal combustion piston engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/19—Propulsion using electrically powered motors
Definitions
- the flying device 1 comprises an airframe 2 and a number of rotors 3 attached to the airframe 2.
- the multiple rotors 3 include a main rotor 3A and a sub-rotor 3B.
- the main rotor 3A is a rotor for generating lift to lift the airframe 2.
- the sub-rotor 3B is a rotor for controlling the attitude of the airframe 2.
- the main rotor 3A rotates by driving force supplied from an engine 4.
- the sub-rotor 3B rotates by driving force supplied from a motor 5.
- the frame body 8 is formed in a rectangular shape in a plan view.
- the frame body 8 is formed so as to surround the engine 4 in a plan view (see FIG. 7, etc.).
- the protruding frame 9 protrudes in a direction away from the frame body 8 in a plan view.
- the protruding frame 9 protrudes in the horizontal direction.
- the main rotor 3A is attached to the protruding frame 9. In other words, the main rotor 3A is attached to the main body 6 (protruding frame 9) rather than to the arm 7.
- the protruding frames (first protruding frame 9A, second protruding frame 9B) to which the main rotor 3A is attached are composed of upper and lower frame materials connected to each other. This improves the strength of the protruding frame 9 against external forces in the vertical direction, and makes it possible to suppress vertical shaking of the protruding frame 9.
- the protruding frames (first protruding frame 9A, second protruding frame 9B) are combined with the members that make up the frame body 8 to form a triangular shape in a plan view. This improves the strength of the protruding frame 9 against approximately horizontal forces acting on the protruding frame 9 due to the rotation of the main rotor 3A, etc., and makes it possible to suppress lateral shaking of the protruding frame 9.
- the flying device 1 of this embodiment is equipped with a first arm 7A, a second arm 7B, a third arm 7C, and a fourth arm 7D.
- the first arm 7A extends from the main body 6 to the front left.
- the second arm 7B extends from the main body 6 to the front right.
- the third arm 7C extends from the main body 6 to the rear left.
- the fourth arm 7D extends from the main body 6 to the rear right.
- the base end 7a of the arm 7 is attached (connected) to the protruding frame 9 of the main body 6.
- the arm 7 is connected to the portion between the base end (base end 9b) in the protruding direction of the protruding frame 9 and the corner 9a. More specifically, the arm 7 is connected to the portion between the base end 9b and the corner 9a of the protruding frame 9, at a position closer to the base end 9b than the corner 9a.
- each arm 7 has two base ends 7a, one of which is connected to the base end 9b of the protruding frame 9, and the other is connected to a position between the corner 9a and the base end 9b, closer to the base end 9b than the corner 9a.
- the distance between the center of the first sub-rotor 3B1 and the center of the second sub-rotor 3B2, the distance between the center of the second sub-rotor 3B2 and the center of the third sub-rotor 3B3, the distance between the center of the third sub-rotor 3B3 and the center of the fourth sub-rotor 3B4, and the distance between the center of the fourth sub-rotor 3B4 and the center of the first sub-rotor 3B1 are all the same.
- the first sub-rotor 3B1 is attached to the tip of the first arm 7A and is located at the left front of the aircraft body 2.
- the second sub-rotor 3B2 is attached to the tip of the second arm 7B and is located at the right front of the aircraft body 2.
- the third sub-rotor 3B3 is attached to the tip of the third arm 7C and is located at the left rear of the aircraft body 2.
- the fourth sub-rotor 3B4 is attached to the tip of the fourth arm 7D and is located at the right rear of the aircraft body 2.
- the main rotor 3A is positioned closer to the center of the aircraft body 2 than the sub-rotor 3B in a plan view.
- the main rotor 3A is positioned inside the circle CL1 connecting the centers of the multiple sub-rotors 3B (inside the aircraft body).
- the sub-rotor 3B is positioned outside the circle CL2 connecting the centers of the multiple main rotors 3A (outside the aircraft body).
- the main rotor 3A is positioned lower than the sub-rotor 3B.
- the blade 3d of the main rotor 3A which will be described later, is positioned lower than the blades (first blade 3f, second blade 3h) of the sub-rotor 3B, which will be described later.
- the rotation trajectory R1 of the blade 3d of the main rotor 3A overlaps with the main body 6 in the vertical direction. More specifically, the rotation trajectory R1 of the blade 3d of the main rotor 3A overlaps with the protruding frame 9 of the main body 6 in the vertical direction. The rotation trajectory R1 does not overlap with the frame main body 8 of the main body 6 in the vertical direction. In addition, the rotation trajectory R1 of the blade 3d of the main rotor 3A overlaps with the arm 7 in the vertical direction. More specifically, the rotation trajectory R1 of the blade 3d of the main rotor 3A overlaps with the part close to the base end 7a of the arm 7 (first part 71 (see FIG. 9, etc., described later) in the vertical direction.
- the rotation trajectory of the blade means the rotation trajectory of the tip of the blade.
- the trajectory traced by the tip of the blade when it rotates is called the “rotation trajectory of the blade”.
- “overlapping in the vertical direction” means “overlapping in a planar view”.
- the sub-rotor 3B includes a first rotor 3BU and a second rotor 3BL.
- the first rotor 3BU and the second rotor 3BL are arranged in a vertically overlapping position.
- the first rotor 3BU is attached above the arm 7.
- the second rotor 3BL is attached below the arm 7.
- the first rotor 3BU is located above the second rotor 3BL.
- the first rotor 3BU will be referred to as the upper rotor 3BU
- the second rotor 3BL will also be referred to as the lower rotor 3BL.
- the first sub-rotor 3B1, the second sub-rotor 3B2, the third sub-rotor 3B3, and the fourth sub-rotor 3B4 each have an upper rotor (first rotor) 3BU and a lower rotor (second rotor) 3BL. Therefore, the flight device 1 has a total of eight sub-rotors 3B.
- the center of the upper rotor 3BU and the center of the lower rotor 3BL are arranged on the same straight line extending in the vertical direction.
- the diameter of the rotational trajectory of the upper rotor 3BU and the diameter of the rotational trajectory of the lower rotor 3BL are the same.
- the upper rotor 3BU and the lower rotor 3BL can rotate in the same direction or in opposite directions.
- the upper rotor 3BU and the lower rotor 3BL can both rotate in the same direction as the first main rotor 3A1, both rotate in the same direction as the second main rotor 3A2, or one can rotate in the same direction as the first main rotor 3A1 and the other can rotate in the same direction as the second main rotor 3A2.
- the motor 5 that supplies driving force to the sub-rotor 3B is an electric motor that is driven by power supplied from a battery 46 described below.
- the motor 5 includes a first motor 5A and a second motor 5B.
- the first motor 5A supplies driving force to the first rotor (upper rotor) 3BU.
- the second motor 5B supplies driving force to the second rotor (lower rotor) 3BL.
- the first motor 5A and the second motor 5B are arranged in positions that overlap in the vertical direction.
- the first motor 5A is arranged above the arm 7 and attached to the arm 7.
- the second motor 5B is arranged below the arm 7 and attached to the arm 7.
- the first rotor (upper rotor) 3BU has a first rotating shaft 3e and a first blade 3f attached to the first rotating shaft 3e.
- the first rotating shaft 3e is a shaft that rotates by the driving force of the first motor 5A and extends in the upward direction.
- the first blade 3f is attached to the upper part of the first rotating shaft 3e.
- the second rotor (lower rotor) 3BL has a second rotating shaft 3g and a second blade 3h attached to the second rotating shaft 3g.
- the second rotating shaft 3g is a shaft that rotates by the driving force of the second motor 5B and extends in the downward direction.
- the second blade 3h is attached to the lower part of the second rotating shaft 3g.
- the first rotating shaft 3e and the second rotating shaft 3g are arranged on the same straight line extending in the vertical direction.
- the number of the first blades 3f and the second blades 3h is not particularly limited, but is two in this embodiment.
- the main rotor 3A is positioned lower than the first rotor (upper rotor) 3BU and the second rotor (lower rotor) 3BL.
- the main rotor 3A is positioned lower than both the first rotor (upper rotor) 3BU and the second rotor (lower rotor) 3BL.
- the vertical distance between the main rotor 3A and the second rotor (lower rotor) 3BL is smaller than the vertical distance between the first rotor (upper rotor) 3BU and the second rotor (lower rotor) 3BL.
- the diameter of the rotation path R1 of the main rotor 3A is larger than the diameter of the rotation path R2 of the sub rotor 3B.
- the thrust per rotation of the blade 3d of the main rotor 3A is larger than the thrust per rotation of the blade (first blade 3f or second blade 3h) of the sub rotor 3B.
- the thrust per rotation of the first blade 3f of the first rotor (upper rotor) 3BU is the same as the thrust per rotation of the second blade 3h of the second rotor (lower rotor) 3BL.
- the thrust per rotation of the blade 3d of the main rotor 3A is preferably larger than the sum of the thrust per rotation of the first blade 3f of the first rotor (upper rotor) 3BU and the thrust per rotation of the second blade 3h of the second rotor (lower rotor) 3BL, but may be the same as or smaller.
- the arm 7 has multiple rods 12 extending side by side.
- the rods 12 extend linearly.
- the rods 12 are made of cylindrical pipes.
- the arm 7 has two rods 12 extending side by side.
- the multiple rods 12 are arranged side by side in the horizontal direction.
- the sub-rotor 3B is supported by the multiple rods 12.
- the tip is positioned higher than the lower end of the skid 10. This prevents the arm 7 from hitting the ground and being damaged when the arm 7 is rotated downward.
- the sub-rotor 3B attached to the tip of the arm 7 is positioned higher than the lower end of the skid 10. This prevents the sub-rotor 3B from hitting the ground and being damaged when the arm 7 is rotated downward.
- the arm 7 has a first portion 71 and a second portion 72.
- the first portion 71 is fixed to the main body 6.
- the second portion 72 extends from the tip of the first portion 71 toward the outside of the aircraft.
- the sub-rotor 3B is attached to the tip of the second portion 72.
- the second portion 72 is rotatable relative to the first portion 71. Specifically, as shown by the arrow Y1 in FIG. 10, the second portion 72 is rotatable downward relative to the first portion 71 around a horizontal axis (the pivot shaft 22 described later). By rotating the second portion 72 downward relative to the first portion 71, the position of the arm 7 changes from the first position (see FIGS. 3 to 6, etc.) to the second position (see FIG. 8).
- the length of the second portion 72 is longer than the length of the first portion 71. Specifically, the length of the second portion 72 is at least twice the length of the first portion 71. In addition, the maximum width of the first portion 71 (the width of the base end portion) is greater than the maximum width of the second portion 72.
- the first portion 71 and the second portion 72 each have a plurality of rods 12 arranged side by side in the horizontal direction.
- the number of rods 12 is two, but there may be three or more.
- the rod 12 constituting the first portion 71 will be referred to as the first rod 12A
- the rod 12 constituting the second portion 72 will be referred to as the second rod 12B.
- the retaining tube 23 is cylindrical and covers the outer circumference of the pivot shaft 22. In other words, the pivot shaft 22 is inserted inside the retaining tube 23.
- the retaining tube 23 is rotatable around the axis of the pivot shaft 22 relative to the pivot shaft 22.
- the base ends of the two rods 12 (second rods 12B) are connected to the retaining tube 23.
- the sub-rotor 3B is attached to the tip ends of the rods 12 (second rods 12B).
- the pivot portion 21 is provided with a switching mechanism 25 that can switch between a first state in which the arm 7 is permitted to rotate relative to the main body portion 6 and a second state in which the arm 7 is not permitted to rotate relative to the main body portion 6.
- a first spacer 28A is disposed on the inside of the first shaft support portion 24A (the side closer to the second shaft support portion 24B).
- a second spacer 28B is disposed on the inside of the second shaft support portion 24B (the side closer to the first shaft support portion 24A).
- the first spacer 28A and the second spacer 28B can be made of a flexible material (rubber, soft resin, etc.).
- the first spacer 28A and the second spacer 28B each have a tube portion 28c and a flange portion 28d.
- the tube portion 28c is inserted inside the retaining tube 23.
- One surface of the flange portion 28d abuts against the end face of the retaining tube 23, and the other surface abuts against the inner surface of the shaft support portion 24.
- a nut 27 is screwed onto the threaded portion 22b.
- the nut 27 is screwed onto the threaded portion 22b protruding from the second support portion 24B.
- the retaining tube 23 and the support portion 24 are connected via the pivot shaft 22.
- the retaining tube 23 is also able to rotate around the axis of the pivot shaft 22. This allows the second part 72 of the arm 7 to rotate relative to the first part 71.
- the flange part 28d is pressed tightly against the end face of the retaining tube 23 with strong force, preventing the retaining tube 23 from rotating and disallowing the second part 72 of the arm 7 from rotating.
- the first support member 31A of the connecting body 31 extends between a plurality of (two) rods 12 in a plan view.
- the first support member 31A of the connecting body 31 has a first end 31a and a second end 31b.
- the first end 31a is connected to the main body 6. More specifically, the first end 31a is connected to the lower part of the main body 6.
- the second end 31b is connected to the middle part of the arm 7.
- the second end 31b is connected to the arm 7 via a bracket 32.
- the bracket 32 is disposed in a position overlapping with the sub rotor 3B in the vertical direction. More specifically, the blades (first blade 3f, second blade 3h) of the sub rotor 3B and the bracket 32 are disposed in a position overlapping with each other in the vertical direction (positions where the blades overlap when rotating).
- the second end 31b of the first support member 31A of the connecting body 31 is detachable from the bracket 32.
- the arm 7 can be rotated from the first position to the second position (see arrow Y1 in FIG. 10).
- FIG. 8 shows the state in which the second end 31b of the first support member 31A has been removed from the bracket 32 and the arm 7 has been rotated from the first position to the second position.
- the flying device 1 is equipped with a stopper 30 that prevents the arm 7 from rotating upward from the predetermined position (first position) described above.
- the stopper 30 is a plate disposed between the first portion 71 and the second portion 72 of the arm 7.
- the stopper 30 is also referred to as the plate 30.
- the plate 30 is disposed with one surface facing the main body 6 and the other surface facing the opposite side to the main body 6 (the sub-rotor 3B side).
- the flying device 1 is equipped with electrical equipment 35 used to drive the sub-rotor 3B.
- the electrical equipment 35 is an inverter that controls the power supplied to the motor 5.
- the electrical equipment 35 is also referred to as the inverter 35.
- the electrical equipment (inverter) 35 is attached to the arm 7.
- the electrical equipment (inverter) 35 is located closer to the main body 6 than the bracket 32 in the longitudinal direction of the arm 7.
- the electrical equipment (inverter) 35 is located between the pivot part 21 and the bracket 32 in the longitudinal direction of the arm 7.
- the first inverter 35A and the second inverter 35B are arranged so as to straddle the two rods 12 (second rod 12B) that make up the arm 7.
- the inverter 35 is arranged so as to connect the two rods 12 (second rod 12B) that make up the arm 7. This allows the inverter 35 to be cooled by the airflow that passes between the two rods 12 (second rod 12B) that make up the arm 7.
- the engine 4 has an engine body 4a and an oil pan 4b.
- the engine body 4a is located at the top of the engine 4.
- the oil pan 4b is located at the bottom of the engine 4. In other words, the oil pan 4b is disposed below the engine body 4a.
- the oil pan 4b can store engine oil that lubricates the metal parts that make up the engine body 4a.
- the engine body 4a is the part of the engine 4 other than the oil pan 4b (such as the crankcase), and drives and rotates the first output shaft 4c and the second output shaft 4d, which will be described later.
- the muffler 37 is arranged vertically (with its longitudinal direction facing up and down) outside the frame main body 8. As shown in Figures 5 and 6, the muffler 37 is attached to the frame main body 8 by an attachment member 75.
- the attachment member 75 is attached to the tenth frame member 110 (see Figure 15) of the second middle frame 100E described below.
- the attachment member 75 holds the muffler 37 in a position away from the frame main body 8. In this way, by arranging the muffler 37 outside the frame main body 8, it is possible to prevent the heat of the exhaust gas emitted from the muffler 37 from adversely affecting the various devices mounted inside the frame main body 8.
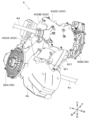
- FIG. 25 is a cross-sectional plan view showing an example of the internal structure of an opposed piston engine used as engine 4.
- the opposed piston engine has a cylinder 80, pistons (first piston 81, second piston 82), and crankshafts (first crankshaft 83, second crankshaft 84).
- first piston 81 and the second piston 82 may be collectively referred to as the "pistons.”
- first crankshaft 83 and the second crankshaft 84 may be collectively referred to as the “crankshaft.”
- the pistons include the first piston 81 and the second piston 82, and the crankshafts include the first crankshaft 83 and the second crankshaft 84.
- Figure 25 shows only the components of an opposed piston engine that are relevant to the present invention, and does not show, for example, intake valves, exhaust valves, spark plugs, injection nozzles, etc.
- the first piston 81 and the second piston 82 are disposed opposite each other in the cylinder 80.
- the first crankshaft 83 is connected to the first piston 81 via a first connecting rod 85.
- the second crankshaft 84 is connected to the second piston 82 via a second connecting rod 86.
- the first piston 81 and the second piston 82 reciprocate within the cylinder 80. More specifically, the first piston 81 and the second piston 82 move in a direction away from or toward each other within the cylinder 80.
- the crankshaft rotates in conjunction with the reciprocating motion of the pistons.
- the first crankshaft 83 rotates in conjunction with the reciprocating motion of the first piston 81.
- the second crankshaft 84 rotates in conjunction with the reciprocating motion of the second piston 82.
- the first crankshaft 83 and the second crankshaft 84 rotate in opposite directions.
- the first generator 56A is connected to the other end of the first crankshaft 83.
- the second generator 56B is connected to the other end of the second crankshaft 84.
- the first generator 56A generates electricity by the rotation of the first crankshaft 83.
- the second generator 56B generates electricity by the rotation of the second crankshaft 84.
- the pump 66 is disposed in front of the fuel tank 50.
- the pump 66 is disposed on the side (front) of the periphery of the lower portion 50a of the fuel tank 50 where the casing 51 (see FIG. 21) is not provided.
- the pump 66 is disposed on the opposite side of the casing 51 in the front-to-rear direction.
- the lower portion 50a of the fuel tank 50 is formed in a truncated cone shape with a diameter that decreases toward the bottom. Therefore, a portion of the cooling system 90 can be arranged at a position that overlaps with the lower portion 50a of the fuel tank 50 in a plan view and in the vertical direction.
- the branch pipe 68A of the cooling system 90 is arranged at a position that overlaps with the lower portion 50a of the fuel tank 50 in a plan view and in the vertical direction.
- the protruding plate 4b3 extends in a direction (rearward) away from the inner wall surface 4b2.
- the protruding plate 4b3 extends horizontally, but may be inclined downward as it moves away from the inner wall surface 4b2.
- the protruding plate 4b3 is provided over the entire length in the depth direction (left-right direction) perpendicular to the width direction of the engine block 400. This improves the strength of the oil pan 4b.
- the inclined portion 401 in a narrow U-shaped cross section, the oil that has accumulated inside the inclined portion 401 can be made to flow quickly and reliably toward the oil pan 4b. Also, compared to when the inclined portion 401 is provided across the entire width of the engine block 400 in the depth direction, it is possible to make the engine block 400 more compact.
- the main body 6 of the flying device 1 is equipped with electrical equipment 300 in addition to the electrical equipment 35 described above.
- the electrical equipment 300 is a battery controller that controls the battery 46.
- the battery controller controls the current and voltage when charging the battery 46.
- the electrical equipment 300 is not limited to a battery controller.
- the electrical equipment 300 may be a control device that controls the drive of the engine 4 or a control device that controls the drive of the motor 5. It may also be an electrical device other than a control device.
- the inverter 35 converts the power supplied from the generator 56 or the battery 46 to a predetermined frequency and supplies it to the driver of the motor 5.
- the driver of the motor 5 uses the power supplied from the inverter 35 to control the motor 5 based on a control signal from the control device 55.
- the flying device 1 is equipped with a positioning device 47, a camera 57, and a sensor 58.
- the positioning device 47 includes a GNSS sensor such as a GPS sensor, a compass, etc.
- the camera 57 acquires image information of the surroundings of the flying device 1.
- the sensors 58 include a gyro sensor 58A, an acceleration sensor 58B, an altitude sensor 58C, an obstacle sensor 58D, etc.
- the control device 55 controls the operation of the engine 4 and the motor 5 based on information input from the positioning device 47, the camera 57, the sensor 58, and the operating device 59.
- the flying device 1 can float in the air due to the lift generated by the rotation of the main rotor 3A.
- the flying device 1 can change its attitude by rotating the sub-rotor 3B.
- the flying device 1 can change its attitude by individually controlling the rotation speed of the multiple sub-rotors 3B. For example, if the rotation speed of the third sub-rotor 3B3 and the fourth sub-rotor 3B4 is made higher than the rotation speed of the first sub-rotor 3B1 and the second sub-rotor 3B2, the flying device 1 will assume an inclined attitude with its front lower than its rear. In this state, the flying device 1 will move forward by rotating the main rotor 3A and the sub-rotor 3B.
- the motors 5 are provided corresponding to each of the multiple sub-rotors 3B.
- one motor 5 is provided corresponding to one sub-rotor 3B.
- motors 5 (first motor 5A and second motor 5B) are provided corresponding to the two rotors (upper rotor 3BU and lower rotor 3BL) constituting the first sub-rotor 3B1.
- Motors 5 (first motor 5A and second motor 5B) are provided corresponding to the two rotors (upper rotor 3BU and lower rotor 3BL) constituting the second sub-rotor 3B2.
- Motors 5 are provided corresponding to the two rotors (upper rotor 3BU and lower rotor 3BL) constituting the third sub-rotor 3B3.
- Motors 5 are provided corresponding to the two rotors (upper rotor 3BU and lower rotor 3BL) constituting the fourth sub-rotor 3B4.
- the control device 55 can control each motor 5 individually.
- the control device 55 can change the rotation speed (rotational speed) of the first motor 5A and the rotation speed (rotational speed) of the second motor 5B individually.
- Being able to adjust the attitude of the flight device 1 makes it possible to improve the straightness of the flight device 1.
- the control device 55 may also be configured to be able to change the rotation direction of the first motor 5A and the rotation direction of the second motor 5B individually. By changing the rotation direction of the first motor 5A and the rotation direction of the second motor 5B individually, the rotation directions of the first rotor (upper rotor) 3BU and the second rotor (lower rotor) 3BL can be made the same or different.
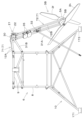
- the main body 6 is composed of multiple straight frame members 100 and joints 200 that connect the frame members 100 together.
- the frame members 100 include a first frame member 101 to a 26th frame member 126.
- the joints 200 include a first joint 201 to a 26th joint 226.
- first frame member 101 is labeled with the reference number 100
- first joint 201 is labeled with the reference number 200.
- the frame body 8 of the main body 6 is constructed by combining multiple straight frame materials 100 into a three-dimensional shape (rectangular parallelepiped shape) with joints 200.
- the frame materials 100 are constructed from cylindrical pipes. This allows the frame materials 100 to be lightweight while still maintaining their strength, making it possible to construct a frame body 8 that is both strong and lightweight.
- the frame members 100 constituting the frame body 8 include horizontal frame members 100A extending horizontally and vertical frame members 100B extending vertically.
- the horizontal frame members 100A include an upper frame 100C, a first middle frame 100D, a second middle frame 100E, and a lower frame 100F. From the top to the bottom of the frame body 8, the upper frame 100C, the first middle frame 100D, the second middle frame 100E, and the lower frame 100F are arranged in this order.
- the upper stage 8B of the frame main body 8 is formed between the upper frame 100C and the first middle frame 100D.
- the engine 4 and other components are arranged in the upper stage 8B.
- the middle stage 8C of the frame main body 8 is formed between the first middle frame 100D and the second middle frame 100E.
- the battery 46, control device 55, and other components are arranged in the middle stage 8C.
- the lower stage 8D of the frame main body 8 is formed between the second middle frame 100E and the lower frame 100F.
- the fuel tank 50 and other components are arranged in the lower stage 8D.
- the engine 4 has an engine body 4a disposed on the upper stage 8B.
- the oil pan 4b of the engine 4 disposed on the middle stage 8C.
- the engine 4 is disposed from the upper stage 8B to the middle stage 8C.
- the pump 66 is disposed on the lower stage 8D. More specifically, the upper part of the pump 66 is disposed on the lower stage 8D, and the lower part of the pump 66 is disposed below the lower stage 8D.
- the radiator 40 is positioned at a height corresponding to the lower level 8D (see Figures 18 and 19). However, the radiator 40 is positioned outside the frame body 8, not inside it.
- the sub-tank (reserve tank) 65 for the radiator 40 is positioned in the upper level 8B of the frame body 8 (see Figures 18 and 19).
- the protruding frames 9 are provided at a height corresponding to the upper stage 8B.
- the arms 7 are provided at a height corresponding to the upper stage 8B.
- the components supporting the rotor 3 main rotor 3A, sub rotor 3B are provided at a height corresponding to the upper stage 8B.
- first output shaft 4c and the second output shaft 4d that supply power to the main rotor 3A are also provided at a height corresponding to the upper stage 8B.
- the second motor 5B is provided at a height corresponding to the upper stage 8B.
- the first motor 5A is provided at a position higher than the height corresponding to the upper stage 8B.
- the horizontal frame members 100A include the first frame member 101 to the fourteenth frame member 114.
- the upper frame 100C is composed of the first frame member 101, the second frame member 102, the third frame member 103, and the fourth frame member 104.
- the first frame member 101 extends in the front-to-rear direction at the left part of the frame main body 8.
- the second frame member 102 extends in the front-to-rear direction at the right part of the frame main body 8.
- the third frame member 103 extends in the left-to-right direction at the front part of the frame main body 8.
- the fourth frame member 104 extends in the left-to-right direction at the rear part of the frame main body 8.
- the first frame material 101 and the third frame material 103 are connected by a first joint 201.
- the first frame material 101 and the fourth frame material 104 are connected by a second joint 202.
- the second frame material 102 and the third frame material 103 are connected by a third joint 203.
- the second frame material 102 and the fourth frame material 104 are connected by a fourth joint 204.
- the first joint 201 is located at the base end (base end 9b) in the protruding direction of the first protruding frame 9A and at one base end 7a of the first arm 7A shown in FIG. 1.
- the second joint 202 is located at the base end (base end 9b) in the protruding direction of the first protruding frame 9A and at one base end 7a of the third arm 7C.
- the third joint 203 is located at the base end (base end 9b) in the protruding direction of the second protruding frame 9B and at one base end 7a of the second arm 7B shown in FIG. 1.
- the fourth joint 204 is located at the base end (base end 9b) in the protruding direction of the second protruding frame 9B and at one base end 7a of the fourth arm 7D.
- the first middle frame 100D is composed of a fifth frame member 105, a sixth frame member 106, a seventh frame member 107, and an eighth frame member 108.
- the fifth frame member 105 extends in the front-to-rear direction below the first frame member 101.
- the sixth frame member 106 extends in the front-to-rear direction below the second frame member 102.
- the seventh frame member 107 extends diagonally from the front of the frame main body 8, moving rearward as it moves from the left to the right.
- the eighth frame member 108 extends diagonally from the rear of the frame main body 8, moving rearward as it moves from the left to the right.
- the seventh frame member 107 and the eighth frame member 108 are arranged parallel to each other.
- the left end of the seventh frame member 107 is connected to the fifth frame member 105 by the fifth joint 205.
- the right end of the seventh frame member 107 is connected to the sixth frame member 106 by the sixth joint 206.
- the left end of the eighth frame member 108 is connected to the fifth frame member 105 by the seventh joint 207.
- the right end of the eighth frame member 108 is connected to the sixth frame member 106 by the eighth joint 208.
- the second middle frame 100E is composed of a ninth frame member 109 and a tenth frame member 110.
- the ninth frame member 109 extends in the left-right direction below the third frame member 103.
- the tenth frame member 110 extends in the left-right direction below the fourth frame member 104.
- the lower frame 100F is composed of an eleventh frame member 111, a twelfth frame member 112, a thirteenth frame member 113, and a fourteenth frame member 114.
- the eleventh frame member 111 extends in the front-to-rear direction below the fifth frame member 105.
- the twelfth frame member 112 extends in the front-to-rear direction below the sixth frame member 106.
- the thirteenth frame member 113 extends in the left-to-right direction below the ninth frame member 109.
- the fourteenth frame member 114 extends in the left-to-right direction below the tenth frame member 110.
- the vertical frame member 100B includes the fifteenth frame member 115 to the eighteenth frame member 118.
- the fifteenth frame member 115 extends vertically at the left front portion of the frame main body 8.
- the sixteenth frame member 116 extends vertically at the right front portion of the frame main body 8.
- the seventeenth frame member 117 extends vertically at the left rear portion of the frame main body 8.
- the eighteenth frame member 118 extends vertically at the right rear portion of the frame main body 8.
- the upper end of the 15th frame member 115 is connected to the first frame member 101 and the third frame member 103 by the first joint 201.
- the lower end of the 15th frame member 115 is connected to the 11th frame member 111 and the 13th frame member 113 by the 13th joint 213.
- the upper end of the 16th frame member 116 is connected to the second frame member 102 and the third frame member 103 by the third joint 203.
- the lower end of the 16th frame member 116 is connected to the 12th frame member 112 and the 13th frame member 113 by the 14th joint 214.
- the upper end of the 17th frame member 117 is connected to the first frame member 101 and the fourth frame member 104 by the second joint 202.
- the lower end of the 17th frame member 117 is connected to the 11th frame member 111 and the 14th frame member 114 by the 15th joint 215.
- the upper end of the 18th frame member 118 is connected to the second frame member 102 and the fourth frame member 104 by the fourth joint 204.
- the lower end of the 18th frame member 118 is connected to the 12th frame member 112 and the 14th frame member 114 by the 16th joint 216.
- the left end of the ninth frame member 109 is connected to the vertical midpoint of the fifteenth frame member 115 by the ninth joint 209.
- the right end of the ninth frame member 109 is connected to the vertical midpoint of the sixteenth frame member 116 by the tenth joint 210.
- the left end of the tenth frame member 110 is connected to the vertical midpoint of the seventeenth frame member 117 by the eleventh joint 211.
- the right end of the tenth frame member 110 is connected to the vertical midpoint of the eighteenth frame member 118 by the twelfth joint 212.
- the front end of the fifth frame member 105 is connected to the middle part of the fifteenth frame member 115 in the vertical direction by the fifth joint 205.
- the rear end of the fifth frame member 105 is connected to the middle part of the seventeenth frame member 117 in the vertical direction by the eighteenth joint 218.
- the front end of the sixth frame member 106 is connected to the middle part of the sixteenth frame member 116 in the vertical direction by the seventeenth joint 217.
- the rear end of the sixth frame member 106 is connected to the middle part of the eighteenth frame member 118 in the vertical direction by the eighth joint 208.
- the left end of the seventh frame member 107 is connected to the middle part of the fifteenth frame member 115 in the vertical direction by the fifth joint 205.
- the right end of the eighth frame member 108 is connected to the middle part of the eighteenth frame member 118 in the vertical direction by the eighth joint 208.
- a top frame 100G is provided at the top of the frame body 8.
- the top frame 100G is provided so as to protrude upward from the upper frame 100C.
- the top frame 100G is composed of a first erection member 141 and a second erection member 142.
- the first erection member 141 and the second erection member 142 are arranged parallel to each other.
- the first erection member 141 and the second erection member 142 extend in the left-right direction.
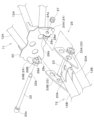
- the protruding frame 9 is composed of multiple straight frame members 100.
- the frame members 100 (19th frame member 119 to 26th frame member 126) of the protruding frame 9 are connected to the frame members 100 (1st frame member 101 to 8th frame member 108, 15th frame member 115 to 18th frame member 118) that make up the frame main body 8 by joints 200 (1st joint 201 to 4th joint 204).
- the 19th frame member 119 and the 21st frame member 121 approach each other as they move away from the frame main body 8.
- the 20th frame member 120 and the 22nd frame member 122 approach each other as they move away from the frame main body 8.
- the left end of the 19th frame member 119 and the left end of the 21st frame member 121 are connected to the upper part of the first connector 145.
- the left end of the 20th frame member 120 and the left end of the 22nd frame member 122 are connected to the lower part of the first connector 145.
- the first connector 145 is a cylindrical member that extends in the vertical direction.
- the first connector 145 is located at the corner 9a of the first protruding frame 9A (see also FIG. 1).
- the first main rotor 3A1 is attached to the first connector 145 (see FIG. 2).
- the 23rd frame member 123 and the 25th frame member 125 approach each other as they move away from the frame main body 8.
- the 24th frame member 124 and the 26th frame member 126 approach each other as they move away from the frame main body 8.
- the left end of the 23rd frame member 123 and the left end of the 25th frame member 125 are connected to the upper part of the second connector 146.
- the left end of the 24th frame member 124 and the left end of the 26th frame member 126 are connected to the lower part of the second connector 146.
- the second connector 146 is a cylindrical member that extends in the vertical direction.
- the second connector 146 is located at the corner 9a of the second protruding frame 9B (see FIG. 1).
- the second main rotor 3A2 is attached to the second connector 146 (see FIG. 2).
- the skid 10 has multiple straight frame members 100 and joints 200 that connect the frame members 100 together.
- the multiple frame members 100 that make up the skid 10 only the first main frame member 151 is labeled with the reference number 100, and of the joints 200 that make up the skid 10, only the 23rd joint 223 is labeled with the reference number 200.
- the frame material 100 includes a main frame material 150 and a sub-frame material 160.
- the main frame material 150 includes a first main frame material 151, a second main frame material 152, a third main frame material 153, and a fourth main frame material 154.
- the upper end of the first main frame material 151 is connected to the thirteenth joint 213 via a first relay member 155.
- a first grounding member 171 (see Figures 3 and 5) that is grounded is attached to the lower end of the first main frame material 151.
- the upper end of the second main frame material 152 is connected to the fourteenth joint 214 via a second relay member 156.
- a second grounding member 172 (see Figures 3 and 6) that is grounded is attached to the lower end of the second main frame material 152.
- the upper end of the third main frame member 153 is connected to the 15th joint 215 via the third relay member 157.
- a third grounding member 173 (see Figures 4 and 5) that is grounded is attached to the lower end of the third main frame member 153.
- the upper end of the fourth main frame member 154 is connected to the 16th joint 216 (see Figure 15) via the fourth relay member 158 (see Figure 21).
- a fourth grounding member 174 (see Figures 4 and 6) that is grounded is attached to the lower end of the fourth main frame member 154.
- the fifth sub-frame member 165 has an upper end connected to the fourth relay member 158 (see FIG. 21) and a lower end connected to the third main frame member 153.
- the sixth sub-frame member 166 has an upper end connected to the third relay member 157 and a lower end connected to the fourth main frame member 154.
- the seventh sub-frame member 167 has an upper end connected to the second relay member 156 and a lower end connected to the fourth main frame member 154.
- the eighth sub-frame member 168 has an upper end connected to the fourth relay member 158 (see FIG. 21) and a lower end connected to the second main frame member 152.
- the first relay member 155 and the fourth relay member 158 are connected by a first connecting member 175.
- the second relay member 156 and the third relay member 157 are connected by a second connecting member 176.
- the first connecting member 175 and the second connecting member 176 are joined so as to intersect below the fuel tank 50 and the casing 51. This makes it possible to prevent foreign objects from hitting the fuel tank 50 and the casing 51 from below.
- the end of the frame material 100 is inserted into the connection port 200a of the joint 200.
- the end of the frame material 100 is inserted into each of the multiple connection ports 200a, so that the multiple frame materials 100 are connected via the joint 200.
- the joint 200 and the frame material 100 are preferably fixed to each other by welding or adhesive when the end of the frame material 100 is inserted into the connection port 200a of the joint 200, but they may also be connected in a separable state (connected only by insertion) without being fixed by welding or adhesive.
- FIG. 22 shows the second engine mount 180B.
- the configuration of the first engine mount 180A is similar to the configuration of the second engine mount 180B.
- the third member 183 is a member that connects the first member 181 and the second member 182.
- a through hole 183a is formed in the third member 183, and this through hole 183a is positioned at a position that overlaps with the through hole formed in the second member 182.
- the second member 182 and the third member 183 are detachably connected by inserting a bolt (not shown) into the through holes formed in the second member 182 and the third member 183 and screwing a nut (not shown) onto the bolt.
- a bolt BL2 is fixed to the third member 183.
- the head of the bolt BL2 is fixed to the third member 183, and the threaded portion extends upward and protrudes from the first member 181.
- An elastic body 184 made of rubber or the like is fixed to the third member 183, and the head of the bolt BL2 is fixed to the elastic body 184.
- the threaded portion of the bolt BL2 is inserted into a through hole formed in the first member 181, and a nut NT1 is screwed onto the threaded portion protruding from the through hole. This connects the third member 183 and the second member 182.
- the first member 181 connected to the engine 4 and the second member 182 connected to the first pipe 170A are connected via the third member 183. This allows the engine 4 to be supported on the first pipe 170A via the first engine mount 180A. The engine 4 is also supported on the second pipe 170B via the second engine mount 180B.
- the aircraft 2 has a main body 6 and a number of arms 7 extending from the main body 6.
- the main rotor 3A is attached to the main body 6.
- the sub-rotor 3B is attached to the arms 7.
- the main rotor 3A includes a first main rotor 3A1 and a second main rotor 3A2.
- the sub-rotor 3B includes a first sub-rotor 3B1, a second sub-rotor 3B2, a third sub-rotor 3B3, and a fourth sub-rotor 3B4.
- the arm 7 extends in a direction away from the main body 6 in a plan view.
- the multiple arms 7 extend radially from the main body 6 in a plan view.
- the arm 7 has multiple rods 12 extending side by side.
- the multiple rods 12 are arranged side by side in the horizontal direction.
- the rotor 3 is supported by the multiple rods 12.
- the number of rods 12 constituting one arm 7 is two, but there may be three or more.
- a first opening 31d is formed in the first side plate portion 32a.
- the first inverter 35A is arranged to face the first opening 31d.
- a second opening (not shown) is formed in the second side plate portion 32b.
- the second inverter 35B is arranged to face the second opening. This allows heat generated from the first inverter 35A and the second inverter 35B to escape from the first opening 31d and the second opening. This makes it possible to prevent the first inverter 35A and the second inverter 35B from overheating.
- multiple sub-rotors 3B are arranged around the aircraft body 2, and the main rotor 3A is arranged inside a circle CL1 that connects the centers of the multiple sub-rotors 3B.
- This configuration makes it possible to reduce the effect of the protruding frame 9 on the lift force generated by the rotation of the main rotor 3A.
- This configuration makes it possible to reduce the effect of the arm 7 on the lift force generated by the rotation of the main rotor 3A.
- the downward airflow generated by the rotation of the blades 3d of the main rotor 3A can be directed at a part of the main body 6 and used to cool the equipment mounted on the main body 6.
- the rotation trajectory R1 of the blade 3d of the main rotor 3A overlaps with the main body 6 and the arm 7 in the vertical direction.
- the flying device 1 comprises a main body 6, an arm 7 extending from the main body 6, and a rotor 3 attached to the arm 7, the arm 7 having a number of rods 12 extending side by side, and the rotor 3 being supported by the number of rods 12.
- This configuration improves the rigidity of the arm 7, preventing the arm 7 from deforming even when a load is applied to the arm 7.
- air currents can pass between the rods 12 arranged side by side, reducing the air resistance experienced by the arm 7 during flight.
- multiple rods 12 are arranged side by side in the horizontal direction.
- This configuration improves the strength of the arm 7 against forces acting in the horizontal direction.
- the arm 7 has a base end 7a attached to the main body 6 and a rotor 3 attached to a tip end 7b, and the spacing between the multiple rods 12 narrows from the base end 7a to the tip end 7b.
- This configuration improves the strength of the base end 7a, which is the attachment portion of the arm 7 to the main body 6. It also reduces the effect of the arm 7 on the airflow caused by the rotation of the rotor 3.
- the middle part of the arm 7 is connected to the main body 6 by the connector 31, so the arm 7 is supported from below by the connector 31. This improves the strength of the arm 7 against forces applied from above.
- the connector 31 has a first end 31a connected to the main body 6 and a second end 31b connected to the middle of the arm 7.
- the second end 31b and the arm 7 are connected via a bracket 32, and the bracket 32 is positioned so as to overlap the rotor 3 in the vertical direction.
- the arm 7 can be supported by the connector 31 at a position where it overlaps with the rotor 3 in the vertical direction. Therefore, the load generated on the arm 7 by the driving of the rotor 3 can be borne by the connector 31.
- the connector 31 also extends between multiple rods 12 when viewed in a plan view.
- the arm 7 can be supported by the connector 31 at a position between multiple rods 12.
- the arm 7 can rotate between a first position in which it extends horizontally and a second position in which it extends upward or downward.
- the flying device 1 includes a main body 6, an arm 7 extending from the main body 6, a rotor 3 attached to the arm 7, and electrical equipment 35 used to drive the rotor 3, the electrical equipment 35 being attached to the arm 7.
- the electrical equipment 35 used to drive the rotor 3 is attached to the arm 7, making it possible to reduce the size and weight of the main body 6.
- the wiring connecting the electrical equipment 35 and the motor 5 can be shortened.
- the flying device 1 also includes a motor 5 that supplies driving force to drive the rotor 3, and the electrical equipment 35 is an inverter that controls the power supplied to the motor 5.
- the rotor 3 includes a first rotor 3BU and a second rotor 3BL arranged in a vertically overlapping position
- the motor 5 includes a first motor 5A that supplies driving force to the first rotor 3BU and a second motor 5B that supplies driving force to the second rotor 3BL
- the inverter 35 includes a first inverter 35A that controls the power supplied to the first motor 5A and a second inverter 35B that controls the power supplied to the second motor 5B.
- the rotor (sub-rotor 3B) has rotating shafts 3e and 3g and blades 3f and 3h attached to the rotating shafts 3e and 3g, and the blades 3f and 3h are positioned so that they overlap the electrical equipment 35 in the vertical direction.
- the flying device 1 also includes a connector 31 that connects the main body 6 to the middle of the arm 7, and the connector 31 extends between the first inverter 35A and the second inverter 35B.
- the connector 31 can support the arm 7 at a position between the first inverter 35A and the second inverter 35B, so the arm 7 to which the inverter 35 is attached can be stably supported.
- the connector 31 has a first end 31a connected to the main body 6 and a second end 31b connected to the middle of the arm 7, the second end 31b and the arm 7 are connected via a bracket 32, and the electrical equipment 35 is positioned so as to overlap the bracket 32 in the longitudinal direction of the arm 7.
- the connector 31 has a first end 31a connected to the main body 6 and a second end 31b connected to the middle of the arm 7, and the second end 31b and the arm 7 are connected via a bracket 32, and the electrical equipment 35 is located closer to the main body 6 than the bracket 32 in the longitudinal direction of the arm 7.
- the airflow generated by the rotation of the blades 3f, 3h can be directed at the bracket 32, so by attaching the electrical equipment 35 at a position overlapping the bracket 32, the electrical equipment 35 can be cooled together with the bracket 32.
- This configuration makes it possible to prevent the tip of the arm 7 from coming into contact with the ground when the arm 7 is rotated downward.
- the direction in which the first output shaft 4c extends and the direction in which the second output shaft 4d extends are not on the same line and are parallel to each other.
- the engine body 4a can be housed within the frame body 8, making it possible to reduce the size of the frame body 8 on which the engine 4 is mounted.
- This configuration allows the arm 7 and main body 6 to be securely connected, and also allows easy connection and disconnection.
- the arm 7 also has multiple rods 12 arranged in a horizontal line, and each of the multiple rods 12 is connected to the frame material 100 by a joint 200.
- the flying device 1 is equipped with an engine 4 that supplies driving force to the rotor 3, and the main body 6 has a frame body 8 on which the engine 4 is mounted, and the frame body 8 is configured by combining multiple straight frame members 100 into a three-dimensional shape with joints 200.
- the main body 6 also has a protruding frame 9 that protrudes from the frame main body 8 and to which a rotor 3 other than the rotor 3 attached to the arm 7 is attached.
- the protruding frame 9 is made up of multiple straight frame members 100, and the frame members 100 of the protruding frame 9 are connected to the frame members 100 that constitute the frame main body 8 by joints 200.
- the arm 7 also has a straight rod 12, which is connected to the frame material 100 that constitutes the protruding frame 9 by a joint 200.
- the flying device 1 also includes a skid 10 attached to the lower part of the main body 6, and the skid 10 has multiple straight frame members 100 and joints 200 that connect the frame members 100 together.
- This configuration makes it easy to form a skid 10 with a shape and size that matches the shape and weight of the main body 6.
- This configuration allows the joint 200 and the frame material 100 to be securely connected, and also provides high strength to the connection between the joint 200 and the frame material 100.
- the frame material 100 is made of cylindrical pipes 170 that are lightweight and resistant to external forces, making it possible to construct the main body 6 with high strength and light weight.
- the frame material 100 is also made of a magnesium alloy.
- the frame material 100 is made of a high-strength, lightweight material, so the main body 6 can be made to be high-strength and lightweight.
- the drive unit also includes an engine 4, and the cooling device 40 includes a radiator 40, which is disposed below the blades 3d of the rotor (main rotor 3A).
- the cooling device 40 is also positioned so that it overlaps with the rotation trajectory R1 of the blade 3d in a plan view.
- the cooling device 40 is also disposed between the center of the rotor 3 and the third plate 44c in a plan view.
- the fuse box that houses the fuse can also function to protect the fuel tank 50.
- first support part 9 and the second support part 7 are connected and integrated, thereby improving the rigidity of the first support part 9 and the second support part 7.
- the aircraft 2 has a main body 6 and an arm 7 extending from the main body 6, the main body 6 has a frame main body 8 on which a drive unit for driving the main rotor 3A is mounted, and a protruding frame 9 protruding from the frame main body 8 and on which the main rotor 3A is attached, the first support part 9 being the protruding frame 9 and the second support part 7 being the arm 7.
- the arm 7 is connected to the portion between the base end 9b and the corner 9a of the protruding frame 9, so that the protruding frame 9 can be reinforced by the arm 7.
- the arm 7 is connected to the portion between the corner 9a and the base end 9b of the protruding frame 9, at a position closer to the base end 9b than the corner 9a.
- the flying device 1 comprises an airframe 2, a rotor 3 attached to the airframe 2, and an engine 4 that supplies the driving force to rotate the rotor 3.
- the airframe 2 has a frame body 8 formed by combining a number of pipes 170, and the engine 4 is supported by an engine mount 180 attached to the pipe 170.
- the engine 4 which is a heavy object, can be reliably supported by the engine mount 180 on the frame body 8, which is made up of multiple pipes 170.
- This configuration allows the mounting position of the engine 4 relative to the frame body 8 to be adjusted along the axial direction of the pipe 170.
- the engine 4 also has an engine body 4a and an oil pan 4b provided below the engine body 4a, and the oil pan 4b is suspended from a pipe 170 together with the engine body 4a.
- the engine 4 can be supported on the frame body 8 without the need for a member to support the oil pan 4b.
- the frame body 8 also has a first pipe 170A arranged on one side of the engine 4 and a second pipe 170B arranged on the other side of the engine 4, and the engine mount 180 includes a first engine mount 180A attached to the first pipe 170A and a second engine mount 180B attached to the second pipe 170B, and the engine 4 is supported by the first engine mount 180A and the second engine mount 180B.
- the first engine mount 180A and the second engine mount 180B can stably support the engine 4 from both one side and the other side.
- the rotor 3 includes a first rotor 3A1 arranged on one side of the engine 4 and a second rotor 3A2 arranged on the other side of the engine 4 in a plan view, and the engine 4 has a first output shaft 4c that supplies driving force to the first rotor 3A1 and a second output shaft 4d that supplies driving force to the second rotor 3A2, and the first pipe 170A and the second pipe 170B extend parallel to the first output shaft 4c and the second output shaft 4d in a plan view.
- the position of the engine 4 can be adjusted along the first pipe 170A and the second pipe 170B without changing the direction in which the first output shaft 4c and the second output shaft 4d extend.
- Flight device 1 also includes a main body 6, an arm 7 extending from main body 6, a rotor 3 (sub rotor 3B) attached to arm 7, a drive unit (engine) 4 that drives rotor 3, and a cooling system 90 that water-cools drive unit 4.
- Cooling system 90 includes a cooling device 40 that cools the coolant supplied to drive unit 4, and a pump 66 that circulates the coolant between cooling device 40 and drive unit 4. Pump 66 is located at the bottom of main body 6.
- This configuration allows for smooth return of cooling water from the cooling device 40 to the pump 66.
- This configuration allows for smooth return of cooling water from the radiator 40 to the pump 66.
- the drive unit 4 also includes an engine 4, and the cooling device 40 cools the coolant supplied to the engine 4.
- the engine 4 can be efficiently cooled by the water-cooled cooling system 90.
- the cooling device 40 is also located below the engine 4.
- This configuration allows for smooth recirculation of cooling water from the engine 4 to the cooling device 40.
- the cooling system 90 also has connecting pipes consisting of a first pipe 67 that connects the discharge port of the pump 66 to the drive unit 4, a second pipe 68 that connects the suction port of the pump 66 to the cooling device 40, and a third pipe 69 that connects the drive unit 4 to the cooling device 40, and the lower end of the pump 66 is located lower than the drive unit 4, the cooling device 40, and the connecting pipes.
- the radiator 40 also includes a first radiator 40A and a second radiator 40B arranged side by side in the horizontal direction, and the pump 66 is arranged between the first radiator 40A and the second radiator 40B in the horizontal direction.
- This configuration allows the cooling water to flow smoothly and evenly between one pump 66 and two radiators (first radiator 40A, second radiator 40B).
- the cooling system 90 also has connecting pipes consisting of a first pipe 67 connecting the discharge port of the pump 66 to the drive unit 4, a second pipe 68 connecting the suction port of the pump 66 to the cooling device 40, and a third pipe 69 connecting the drive unit 4 to the cooling device 40.
- the second pipe 68 branches into two branch pipes 60A and 60B midway, one of which, the branch pipe 60A, is connected to the first radiator 40A, and the other branch pipe 60B is connected to the second radiator 40B.
- the engine 4 can be efficiently cooled using two radiators (first radiator 40A, second radiator 40B) with one cooling system 90.
- the flying device 1 also includes a fuel tank 50 that stores fuel to be supplied to the engine 4.
- the fuel tank 50 has a truncated cone-shaped lower portion 50a whose diameter decreases toward the bottom. At least a portion of the cooling system 90 is positioned so as to overlap the fuel tank 50 in a plan view, and its vertical position overlaps with the lower portion 50a of the fuel tank 50.
- At least a part of the cooling system 90 can be disposed near the truncated cone-shaped lower part 50a of the fuel tank 50, so the space required for disposing the fuel tank 50 and the cooling system 90 can be reduced, making it possible to miniaturize the flying device 1.
- the engine 4 also includes pistons (first piston 81, second piston 82), a crankshaft (first crankshaft 83, second crankshaft 84) that rotates with the reciprocating motion of the pistons, an engine block 400 that houses the pistons and the crankshaft, and an oil pan 4b provided below the engine block 400, with the oil pan 4b provided on only one of the two widthwise sides of the engine block 400.
- the oil pan 4b is provided on one side of the engine block 400 in the width direction, so the bottom surface of the engine block 400 is higher on the other side of the engine block 400 in the width direction.
- a space S2 is created below the engine 4 on the other side in the width direction where the bottom surface is higher, and this space S2 can be used effectively.
- equipment for driving the apparatus can be placed in the space S2.
- This configuration allows for effective use of the space S2 that is created below the opposed piston engine in a device that uses an opposed piston engine as the engine 4.
- the first crankshaft 83 and the second crankshaft 84 are arranged parallel to each other with a gap in the width direction, and the oil pan 4b is provided on the first crankshaft 83 side.
- This configuration makes it possible to secure space below the second crankshaft 84 side of the engine 4 for arranging other equipment.
- the inclined portion 401 can be made smaller than when the inclined portion 401 is provided over the entire length in the depth direction, allowing the engine 4 to be made smaller.
- the inclined portion 401 is formed with a U-shaped cross section.
- This configuration allows electrical equipment and other devices to be placed in the space S2 created below the other side of the engine 4 in the width direction, making it possible to make the flying device 1 compact.
- the flying device 1 also includes electrical equipment 300 mounted on the main body 6, which is located below the engine 4 and on the other side of the engine block 400 in the width direction, and its vertical position overlaps with the oil pan 4b.
- the electrical equipment 300 can be placed in the space formed below the other widthwise side of the engine block 400 (the side where the oil pan 4b is not provided). Therefore, in the flying device 1, the electrical equipment 300 and the engine 4 can be placed close to each other in a compact manner. This allows the flying device 1 to be made smaller.
- the flying device 1 also includes a motor 5 that supplies driving force to the rotor 3, and a battery 46 that stores the power supplied to the motor 5, and the electrical equipment 300 is a battery controller that controls the battery 46.
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Remote Sensing (AREA)
- Toys (AREA)
- Handcart (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP22970001.8A EP4644265A1 (en) | 2022-12-27 | 2022-12-27 | Flying apparatus |
| JP2024566992A JPWO2024142207A1 (https=) | 2022-12-27 | 2022-12-27 | |
| PCT/JP2022/048092 WO2024142207A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行装置 |
| US19/250,356 US20250319975A1 (en) | 2022-12-27 | 2025-06-26 | Flying apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/048092 WO2024142207A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US19/250,356 Continuation US20250319975A1 (en) | 2022-12-27 | 2025-06-26 | Flying apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024142207A1 true WO2024142207A1 (ja) | 2024-07-04 |
Family
ID=91716692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/048092 Ceased WO2024142207A1 (ja) | 2022-12-27 | 2022-12-27 | 飛行装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250319975A1 (https=) |
| EP (1) | EP4644265A1 (https=) |
| JP (1) | JPWO2024142207A1 (https=) |
| WO (1) | WO2024142207A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4678539A1 (en) * | 2024-07-09 | 2026-01-14 | Skansen Technologies AB | Unmanned aerial vehicle comprising structural arm members |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008169946A (ja) * | 2007-01-12 | 2008-07-24 | Kurashiki Kako Co Ltd | 防振架台 |
| JP2009079509A (ja) * | 2007-09-25 | 2009-04-16 | Toyota Motor Corp | 二槽式オイルパンのドレンプラグ、二槽式オイルパンの内槽用プラグ及び二槽式オイルパンのドレン構造 |
| JP2009150298A (ja) * | 2007-12-20 | 2009-07-09 | Toyota Motor Corp | オイルパン |
| JP2017154654A (ja) | 2016-03-03 | 2017-09-07 | 双葉電子工業株式会社 | マルチコプター |
| CN210133293U (zh) * | 2018-12-18 | 2020-03-10 | 广州市华科尔科技股份有限公司 | 一种无人机用双缸水冷动力装置 |
| JP6979251B1 (ja) * | 2021-10-07 | 2021-12-08 | 株式会社石川エナジーリサーチ | 飛行装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9388794B2 (en) * | 2011-05-23 | 2016-07-12 | Sky Windpower Corporation | Flying electric generators with clean air rotors |
| US9919797B2 (en) * | 2014-12-04 | 2018-03-20 | Elwha Llc | System and method for operation and management of reconfigurable unmanned aircraft |
| MY182350A (en) * | 2015-03-31 | 2021-01-20 | Zhuhai Yuren Agricultural Aviation Co Ltd | Multifunctional flying platform |
| US10160541B1 (en) * | 2015-09-25 | 2018-12-25 | Amazon Technologies, Inc. | Circumferentially-driven propulsion mechanism |
| US10232950B2 (en) * | 2016-07-01 | 2019-03-19 | Bell Helicopter Textron Inc. | Aircraft having a fault tolerant distributed propulsion system |
| US10183746B2 (en) * | 2016-07-01 | 2019-01-22 | Bell Helicopter Textron Inc. | Aircraft with independently controllable propulsion assemblies |
| KR101896999B1 (ko) * | 2017-04-24 | 2018-09-10 | 한국항공우주연구원 | 동체 진동 저감용 중간지지체를 갖는 멀티콥터 및 이의 동체 진동 저감 제어방법 |
| US20180354609A1 (en) * | 2017-06-07 | 2018-12-13 | Joseph R. Renteria | Aircraft with linear thruster arrangement |
| US12091165B2 (en) * | 2017-06-26 | 2024-09-17 | Acc Innovation Ab | Rotor flight vehicle |
| US11027836B2 (en) * | 2018-07-13 | 2021-06-08 | The Boeing Company | Rotorcraft with canted coaxial rotors |
| KR20190104016A (ko) * | 2019-08-16 | 2019-09-05 | 엘지전자 주식회사 | 무인 항공 시스템에서 무인 항공 로봇의 움직임을 제어한 촬영 방법 및 이를 지원하기 위한 장치 |
| JPWO2021074986A1 (https=) * | 2019-10-16 | 2021-04-22 | ||
| DE102020126689A1 (de) * | 2020-10-12 | 2022-04-14 | Volocopter Gmbh | Fluggerät sowie Verfahren und rechnergestütztes System zur Steuerung eines Fluggeräts |
| US20220219815A1 (en) * | 2021-01-08 | 2022-07-14 | Jimmy R. Bryson | Unmanned Aerial Drone Crane |
| NO346478B1 (en) * | 2021-02-03 | 2022-08-29 | Railway Robotics As | Improved drone with railway driving capabilities |
| JP6954708B1 (ja) * | 2021-08-26 | 2021-10-27 | 株式会社石川エナジーリサーチ | エンジン搭載飛行装置 |
| US12103673B2 (en) * | 2022-01-10 | 2024-10-01 | Textron Innovations Inc. | Payload saddle assemblies for use on aircraft |
| KR102457578B1 (ko) * | 2022-01-19 | 2022-10-21 | 주식회사 보라스카이 | 탈착식 운송임무장치를 구비한 무인항공기 |
| EP4269239A1 (en) * | 2022-04-25 | 2023-11-01 | Fundación Tecnalia Research & Innovation | Omnidirectional vehicle with passive revolute joints |
| WO2024006171A1 (en) * | 2022-06-27 | 2024-01-04 | Melcher Thomas W | Industrial aerial robot systems and methods |
| AU2023380077A1 (en) * | 2022-11-14 | 2025-05-22 | TooFon, Inc. | Coaxial rotor pair assembly with variable collective pitch rotor/propeller for flight vehicle or drone |
| EP4644241A1 (en) * | 2022-12-27 | 2025-11-05 | Kubota Corporation | Work device and work flight vehicle |
| US12404911B1 (en) * | 2024-12-06 | 2025-09-02 | Samanth Mottera Srinivas | Turboshaft engine powered quadrotor drone |
-
2022
- 2022-12-27 JP JP2024566992A patent/JPWO2024142207A1/ja active Pending
- 2022-12-27 WO PCT/JP2022/048092 patent/WO2024142207A1/ja not_active Ceased
- 2022-12-27 EP EP22970001.8A patent/EP4644265A1/en active Pending
-
2025
- 2025-06-26 US US19/250,356 patent/US20250319975A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008169946A (ja) * | 2007-01-12 | 2008-07-24 | Kurashiki Kako Co Ltd | 防振架台 |
| JP2009079509A (ja) * | 2007-09-25 | 2009-04-16 | Toyota Motor Corp | 二槽式オイルパンのドレンプラグ、二槽式オイルパンの内槽用プラグ及び二槽式オイルパンのドレン構造 |
| JP2009150298A (ja) * | 2007-12-20 | 2009-07-09 | Toyota Motor Corp | オイルパン |
| JP2017154654A (ja) | 2016-03-03 | 2017-09-07 | 双葉電子工業株式会社 | マルチコプター |
| CN210133293U (zh) * | 2018-12-18 | 2020-03-10 | 广州市华科尔科技股份有限公司 | 一种无人机用双缸水冷动力装置 |
| JP6979251B1 (ja) * | 2021-10-07 | 2021-12-08 | 株式会社石川エナジーリサーチ | 飛行装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4644265A1 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4678539A1 (en) * | 2024-07-09 | 2026-01-14 | Skansen Technologies AB | Unmanned aerial vehicle comprising structural arm members |
| WO2026012726A1 (en) * | 2024-07-09 | 2026-01-15 | Skansen Technlogies Ab | Unmanned aerial vehicle comprising structural arm members |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024142207A1 (https=) | 2024-07-04 |
| EP4644265A1 (en) | 2025-11-05 |
| US20250319975A1 (en) | 2025-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6362533B1 (en) | Engine generator unit | |
| JP7490049B2 (ja) | マルチコプタ | |
| JP7136902B2 (ja) | 電動パワーユニット、および作業機 | |
| WO2024142207A1 (ja) | 飛行装置 | |
| WO2024142210A1 (ja) | 飛行装置 | |
| JP7185971B1 (ja) | 飛行装置 | |
| CN107791276B (zh) | 机器人 | |
| WO2024142201A1 (ja) | 飛行装置 | |
| WO2024142202A1 (ja) | 飛行装置 | |
| WO2024142200A1 (ja) | 飛行装置 | |
| WO2024142206A1 (ja) | 飛行装置 | |
| WO2024142196A1 (ja) | 飛行装置 | |
| WO2024142197A1 (ja) | 飛行装置 | |
| WO2024142199A1 (ja) | 飛行装置 | |
| WO2024142198A1 (ja) | 飛行装置 | |
| WO2024142205A1 (ja) | 飛行装置 | |
| WO2024142208A1 (ja) | エンジン及び飛行装置 | |
| WO2024142204A1 (ja) | 飛行装置 | |
| WO2024142203A1 (ja) | 飛行装置 | |
| WO2024142209A1 (ja) | 飛行装置 | |
| SE529839C2 (sv) | Brytverktyg med avvibrerad handtagsanordning | |
| US12515513B2 (en) | Power generation assembly and series hybrid vehicle | |
| CN210133293U (zh) | 一种无人机用双缸水冷动力装置 | |
| WO2021221156A1 (ja) | 飛行体用エンジン発電機ユニット及び飛行体 | |
| EP3789545A1 (en) | Driving arrangement for construction machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22970001 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024566992 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022970001 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022970001 Country of ref document: EP Effective date: 20250728 |
|
| ENP | Entry into the national phase |
Ref document number: 2022970001 Country of ref document: EP Effective date: 20250728 |
|
| WWP | Wipo information: published in national office |
Ref document number: 2022970001 Country of ref document: EP |