WO2023223765A1 - 物体検知装置および物体検知方法 - Google Patents
物体検知装置および物体検知方法 Download PDFInfo
- Publication number
- WO2023223765A1 WO2023223765A1 PCT/JP2023/015771 JP2023015771W WO2023223765A1 WO 2023223765 A1 WO2023223765 A1 WO 2023223765A1 JP 2023015771 W JP2023015771 W JP 2023015771W WO 2023223765 A1 WO2023223765 A1 WO 2023223765A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- door
- detection point
- point group
- obstacle
- detection
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 176
- 239000013598 vector Substances 0.000 claims abstract description 56
- 238000009826 distribution Methods 0.000 claims abstract description 44
- 238000004364 calculation method Methods 0.000 claims description 53
- 238000010801 machine learning Methods 0.000 claims description 30
- 239000000523 sample Substances 0.000 abstract 1
- 238000000034 method Methods 0.000 description 50
- 230000008569 process Effects 0.000 description 38
- 238000012545 processing Methods 0.000 description 34
- 238000010586 diagram Methods 0.000 description 26
- 238000003860 storage Methods 0.000 description 6
- 238000012850 discrimination method Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000013473 artificial intelligence Methods 0.000 description 2
- 239000010426 asphalt Substances 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 239000000088 plastic resin Substances 0.000 description 2
- 238000012706 support-vector machine Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000002790 cross-validation Methods 0.000 description 1
- 238000003066 decision tree Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000007636 ensemble learning method Methods 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000007781 pre-processing Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 238000007637 random forest analysis Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011946 reduction process Methods 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60J—WINDOWS, WINDSCREENS, NON-FIXED ROOFS, DOORS, OR SIMILAR DEVICES FOR VEHICLES; REMOVABLE EXTERNAL PROTECTIVE COVERINGS SPECIALLY ADAPTED FOR VEHICLES
- B60J5/00—Doors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computer Networks & Wireless Communication (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Mechanical Engineering (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Electromagnetism (AREA)
- Multimedia (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
実施形態の物体検知装置は、学習フェーズにおいて、センサから送信された探査波の物体による反射波に基づく検知点群の分布形状を示す特徴ベクトルと物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成する。そして、物体検知装置は、推定フェーズにおいて、取得された複数の受信結果に基づいて、物体の位置として検知点群を算出し、算出された検知点群に基づいて、検知点群の分布形状を示す特徴ベクトルを算出し、算出された特徴ベクトルと、物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する。
Description
本発明の実施形態は、物体検知装置および物体検知方法に関する。
従来から、車両(自動車)のドアを、乗員や乗り込もうとする者の操作によって自動的に開閉するオートドアシステムの研究、開発が進められている。オートドアシステムでは、ドアの開動作時に、ドアが障害物(人、他車両など)に衝突しない性能が必要不可欠である。以下では、自動的に開閉するドアを「オートドア」とも称する。また、以下では、スイング式のドアを想定する。
上述の性能を実現するために、例えば、オートドア内部に物体検知センサ(ミリ波レーダなど)を設け、センシングによって得た検知点群に基づいて障害物の位置を推定し、ドアが障害物に衝突しないように制御する手法がある。
この手法によれば、物体検知センサで捉えた検知点群の幾何的情報から、障害物の位置を推定(算出)することができる。これにより、オートドアの開可動角度(開放可能な角度)を算出し、オートドアが障害物に衝突しないように開動作させることは、一応可能である。
しかしながら、上述の従来技術では、路面などの周辺環境によっては、不具合を生じることがある。例えば、アスファルト路面などのいくつかの種類の路面では、障害物がない場合でも検知点が多く現れる。これにより、障害物がある場合に検知した位置の誤差が大きくなったり、あるいは、障害物がないのに障害物があると誤判定してしまったりすることがある。
つまり、ノイズをある程度以上含んだ検知点群を用いると、障害物までの距離がまだ大きい状況でドアの開動作を停止してしまったり、あるいは、ドアを開動作できる状況なのに全く開動作させなかったり、といった不具合を起こす場合がある。
そこで、本発明の課題の一つは、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる物体検知装置および物体検知方法を提供することである。
本発明の実施形態の物体検知装置は、例えば、車両のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得部と、学習フェーズにおいて、前記取得部によって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成部と、推定フェーズにおいて、前記取得部によって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出部と、前記第1算出部によって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出部と、前記第2算出部によって算出された前記特徴ベクトルと、前記物体検知モデルと、に基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定部と、を備える。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。
また、前記物体検知装置では、例えば、前記モデル生成部は、前記検知点群を前記センサが設置されたドアを基準とする3次元座標へ座標変換し、前記3次元座標において前記検知点群に基づいて少なくとも一つの関心領域を設定し、設定された前記関心領域における前記検知点群の分布形状を示す特徴ベクトルを算出して入力データとし、前記第2算出部は、前記第1算出部によって算出された前記検知点群を前記3次元座標へ座標変換し、前記3次元座標において前記検知点群に基づいて少なくとも一つの関心領域を設定し、設定された前記関心領域における前記検知点群の分布形状を示す特徴ベクトルを算出する。
この構成により、ドアを基準とする3次元座標で関心領域を設定して検知点群の分布形状を示す特徴ベクトルを算出するというより具体的な処理を実現できる。
この構成により、ドアを基準とする3次元座標で関心領域を設定して検知点群の分布形状を示す特徴ベクトルを算出するというより具体的な処理を実現できる。
また、前記物体検知装置では、例えば、前記ドアは、スイング式のドアであり、前記物体検知装置は、前記ドアを開閉動作させる駆動部を制御する制御部を、さらに備え、前記制御部は、前記推定部によって前記物体が障害物であることを示す情報が出力された場合に、当該障害物の位置情報に基づいて前記ドアの開可動角度を設定し、設定された前記開可動角度まで前記ドアが開動作するように前記駆動部を制御する。
この構成により、設定された開可動角度までドアを開動作させることで、ドアと障害物の衝突を回避するとともに、ドアが不要に手前で開動作を停止する事態も回避できる。
この構成により、設定された開可動角度までドアを開動作させることで、ドアと障害物の衝突を回避するとともに、ドアが不要に手前で開動作を停止する事態も回避できる。
また、前記物体検知装置では、例えば、前記制御部は、前記車両の使用者による前記ドアの自動開動作要求に基づいて、設定された前記開可動角度まで前記ドアが開動作するように前記駆動部を制御する。
この構成により、車両の使用者は、ドアの自動開動作要求に対応する所定の操作を行うことで、ドアを開動作させることができる。
この構成により、車両の使用者は、ドアの自動開動作要求に対応する所定の操作を行うことで、ドアを開動作させることができる。
また、本実施形態の物体検知方法は、例えば、車両のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得ステップと、学習フェーズにおいて、前記取得ステップによって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成ステップと、推定フェーズにおいて、前記取得ステップによって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出ステップと、前記第1算出ステップによって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出ステップと、前記第2算出ステップによって算出された前記特徴ベクトルと、前記物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定ステップと、を含む。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。
本発明の実施形態の物体検知方法は、例えば、車両のスイング式のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得ステップと、学習フェーズにおいて、前記取得ステップによって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成ステップと、推定フェーズにおいて、前記取得ステップによって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出ステップと、前記第1算出ステップによって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出ステップと、前記第2算出ステップによって算出された前記特徴ベクトルと、前記物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定ステップと、前記推定ステップによって前記物体が障害物であることを示す情報が出力された場合に、当該障害物の位置情報に基づいて前記ドアの開可動角度を設定し、設定された前記開可動角度まで前記ドアが開動作するように、前記ドアを開閉動作させる駆動部を制御する制御ステップと、を含む。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。また、設定された開可動角度までドアを開動作させることで、ドアと障害物の衝突を回避するとともに、ドアが不要に手前で開動作を停止する事態も回避できる。
この構成により、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両の周囲の障害物を高精度に検知することができる。また、設定された開可動角度までドアを開動作させることで、ドアと障害物の衝突を回避するとともに、ドアが不要に手前で開動作を停止する事態も回避できる。
以下、本発明の物体検知装置および物体検知方法の実施形態について説明する。以下の実施形態の構成、ならびに当該構成によってもたらされる作用、結果、および効果は、例である。本発明は、以下の実施形態に開示される構成以外によっても実現可能であるとともに、基本的な構成に基づく種々の効果や、派生的な効果のうち、少なくとも1つを得ることが可能である。
なお、以下の実施形態では、機械学習の例として、「教師あり学習(教師データを用いた学習)」を採用した場合について説明する。また、機械学習について、学習の場面を「学習フェーズ」と称し、推定の場面を「推定フェーズ」と称する。
図1は、実施形態のセンサ部3が搭載される車両1を側方から見た外観図である。図2は、実施形態のオートドアシステムSの機能構成図である。
図1に示すように、車両1のスイング式のドア21の所定位置にセンサ部3が設置される。センサ部3で用いるミリ波は、金属には反射・吸収されてしまうが、プラスチック樹脂は透過しやすい性質を持っているため、センサ部3はドア21のパネルの樹脂部分に搭載するのが好適である。なお、図示や説明を簡潔にするために図1では1つのドア21にしかセンサ部3を設置していないものとしたが、これに限定されず、2つ以上のドアにセンサ部が設置されてもよい。
また、図2に示すように、オートドアシステムSは、センサ部3と、オートドア部2と、を備える。オートドアシステムSは、1つのドア21に対して1組が設けられる。
センサ部3は、ドア21の自動開動作を妨げる障害物を検知する手段である。センサ部3は、DSP31(Digital Signal Processor)と、ミリ波レーダ32(センサ)と、を備える。
ミリ波レーダ32は、周囲にミリ波(周波数30~300GHz帯の電波)を送信するとともに、反射されてきたミリ波を受信し、両波を混合した中間周波数(IF:Intermediate Frequency)信号を生成・出力するセンサ部品である。なお、ミリ波レーダ32による出力情報は、アナログ-デジタル変換回路により、デジタル信号化されるものとする。ミリ波レーダ32は、近年では小型化、薄型化が進み、車両1のドア21の内部に埋設することが容易になっている。
DSP31は、ミリ波レーダ32から出力されたIF信号に基づいて、障害物の位置や速度などを算出する。DSP31は、専門的な信号処理を実行する装置である。DSP31は、一種のコンピュータであるので、算出情報を基に更に特別な信号処理を加えるプログラムを追加し、実行することも可能である。
ここで、図3は、実施形態のDSP31の機能構成図である。図3に示すように、DSP31は、処理部5と、記憶部6と、を有する。
記憶部6は、処理部5が実行するプログラムや、プログラムの実行に必要なデータを記憶する。例えば、記憶部6は、処理部5が実行する物体検知プログラムや、その物体検知プログラムの実行に必要な数値データやドア軌跡データなどを記憶する。記憶部6は、例えば、ROM(Read Only Memory)やRAM(Random Access Memory)などによって実現される。ROMは、各プログラムやパラメータ等を記憶する。RAMは、CPU(Central Processing Unit)での演算で用いられる各種のデータを一時的に記憶する。
処理部5は、ミリ波レーダ32から出力された情報に基づいて物体の位置などを算出する。処理部5は、例えば、CPUの機能として実現される。処理部5は、機能構成として、取得部51と、モデル生成部52と、第1算出部53と、第2算出部54と、推定部55と、制御部56と、を備える。処理部5は、例えば、記憶部6に格納された物体検知プログラムを読み込むことによって、各機能構成として動作する。また、各機能構成の一部または全部を、ASIC(Application Specific Integrated Circuit)や、FPGA(Field-Programmable Gate Array)を含む回路等のハードウェアによって実現してもよい。
取得部51は、各種構成から各種情報を取得する。例えば、取得部51は、ミリ波レーダ32から送信されたミリ波(探査波)が車両1の周囲の物体で反射することで発生した反射波の複数の受信結果を、ミリ波レーダ32から取得する。
学習フェーズにおいて、モデル生成部52は、取得部51によって取得された複数の受信結果に基づいて物体の位置として検知点群を算出し、検知点群の分布形状を示す特徴ベクトルと物体が障害物か否かを示す情報の関係性を機械学習することによって物体検知モデルを生成する。その場合、モデル生成部52は、検知点群をセンサ部3が設置されたドア21を基準とする3次元座標へ座標変換し、3次元座標において検知点群に基づいて少なくとも一つの関心領域を設定し、設定された関心領域における検知点群の分布形状を示す特徴ベクトルを算出して入力データとする(詳細は後述)。
推定フェーズにおいて、第1算出部53、第2算出部54、推定部55は、以下の処理を行う。
第1算出部53は、新たに取得部51によって取得された複数の受信結果に基づいて、物体の位置として検知点群を算出する。
第2算出部54は、第1算出部53によって算出された検知点群に基づいて、検知点群の分布形状を示す特徴ベクトルを算出する。その場合、第2算出部は、第1算出部53によって算出された検知点群を3次元座標へ座標変換し、3次元座標において検知点群に基づいて少なくとも一つの関心領域を設定し、設定された関心領域における検知点群の分布形状を示す特徴ベクトルを算出する(詳細は後述)。
推定部55は、第2算出部54によって算出された特徴ベクトルと、物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する。
制御部56は、各種制御を実行する。例えば、制御部56は、推定部55によって判別結果として物体が障害物であることを示す情報が出力された場合に、当該障害物の位置情報に基づいてドア21の開可動角度(以下、「ドア可動角度」とも称する。)を設定する(詳細は後述)。
DSP31は、処理した情報を、車載ネットワーク4を介して、オートドア部2に出力する。車載ネットワーク4は、例えば、CAN(Controller Area Network)やCAN-FD(Flexible Data Rate)等である。
図2に戻って、オートドア部2は、センサ部3による障害物検知情報に基づいてドア21の開閉動作などを制御する手段である。オートドア部2は、ドア21と、ドア駆動ユニット22(ドアを開閉動作させる駆動部)と、ECU23(Electronic Control Unit)と、を備える。
ドア駆動ユニット22は、ドア21の開閉動作を行う電気部品である。
ECU23は、DSP31から受け取った情報に基づいて、ドア21の制御方法を決める専門的な信号処理を実行する装置である。ECU23は、一種のコンピュータであるので、これに加えて特別な信号処理を加えるプログラムを追加し、実行することも可能である。
ECU23は、各種制御を実行する制御部である。ECU23は、ドア21のヒンジ部分に設置されるドア駆動ユニット22を制御する。ECU23は、例えば、DSP31によって設定されたドア可動角度までドア21が開動作するようにドア駆動ユニット22を制御する。
また、ECU23は、例えば、車両1の使用者によるドア21の自動開動作要求に基づいて、設定された開可動角度までドア21が開動作するようにドア駆動ユニット22を制御する。
次に、図4は、実施形態のオートドアシステムSによる全体処理を示すフローチャートである。まず、概要を説明する。車両1の使用者が車両1を活動状態にすると同時にこの全体処理が起動し、車両1が活動状態にある間は常時継続するものとする。また、車両1の使用者が車両1を非活動状態にしたときには、この全体処理も停止するものとする。ただし、車両1が走行中であったり、電気エネルギーの消費低減のために車両1が休止状態であったりする場合には、この全体処理は一時停止としてもよい。
まず、ステップS11において、オートドアシステムSは、車両1が静止しており、かつ、開動作の対象のドア21が全閉しているか否かを判定し、Yesの場合はステップS12に進み、Noの場合は処理を終了する。オートドア開動作をこのような条件付きとすることで、安全性を確保できる。
ステップS12において、オートドアシステムSは、使用者によってオートドア開動作の実行を命令するコマンド入力があったか否かを判定し、Yesの場合はステップS13に進み、Noの場合は処理を終了する。ここで、使用者とは、車両1の内部あるいは外部(以下、「車内外」とも称する。)にあって、その操作をし得る者を指す。例えば、使用者は、車内外にあって、他者が乗車あるいは降車するのを支援できる立場の者の場合もあるし、あるいは、実際に自身が車両1に乗ったり車両1から降りたりする者である場合もある。また、車両が自動運転車であるときでは、車両制御を担う人工知能が使用者に該当する場合もある。
また、オートドア開動作のコマンド入力方法としては、キーフォブ、車内ダッシュボード、スマートフォンの専用アプリケーションなどに備わるボタンの押下や、予め定められた発声やジェスチャーの実行等から選択できるものとする。
ステップS13において、オートドアシステムSは、オートドア開動作を実行する(詳細は図5で後述)。
次に、ステップS14において、オートドアシステムSは、オートドア閉動作を実行する。なお、ドアの閉動作は、ほかに、使用者あるいは他者が手動で行ってもよい。また、車両が自動運転車であるときでは、人の乗車あるいは降車の完了を認識した後に、人工知能がドアを閉動作させてもよい。ドア21が全閉した後、動作フローは再帰し、次のオートドア開動作等に備える。
次に、図5、図6を参照して、図4のステップS13の処理の詳細について説明する。なお、図5は常時動作型の場合の例であり、図6はイベント駆動型の場合の例である(詳細は後述)。
図5は、図4のステップS13の処理の詳細を示すフローチャートである。この図5の処理フローは、車両1が活動状態にある間は、周期的に続けられる。本処理フローで重要なことは、使用者によるオートドア開動作のコマンド入力の有無(図4のステップS12のYes/No)に関わらず、図4の全体処理の実行中は、ミリ波レーダ32による障害物検知(図5のステップS201~S205)が常時実行されることである。以下、具体的に説明する。
ステップS201において、ミリ波レーダ32によるセンシングを行う。つまり、ミリ波レーダ32によって、ドア21の開軌道近辺にあってドア21と衝突の可能性がある障害物を検知する。障害物としては、例えば、人、車両、縁石、建物の壁などが挙げられる。
次に、ステップS202において、DSP31の推定部55は、ミリ波レーダ32によるセンシングデータに基づいて障害物の有無の判別を行う。ここでは、ミリ波レーダ32が捉えた検知点群の分布様式を、障害物の有無を判別する材料とする(詳細は後述)。なお、説明を省略しているが、第1算出部53や第2算出部54による処理も適宜行う。
次に、ステップS203において、DSP31の制御部56は、自動開動作を妨げる障害物があるか否かを判定し、Yesの場合はステップS204に進み、Noの場合はステップS205に進む。
ステップS204において、DSP31の制御部56は、障害物の位置情報に基づいてドア可動角度を設定する。つまり、制御部56は、ドア21の開軌道近辺にある障害物に対するドア21の衝突を回避するためのドア可動角度を設定する(詳細は後述)。
ステップS205において、DSP31の制御部56は、ドア可動角度を全開に設定する。制御部56は、例えば、単純に、ドア可動角度を、ドアヒンジの全開値に等しいと決める。
次に、ステップS206において、ECU23は、使用者によるオートドア開動作のコマンド入力があったか否かを判定し、Yesの場合はステップS207に進み、Noの場合はステップS201に戻る。
ステップS207において、ECU23は、ドア駆動ユニット22を制御することによるドア21の自動開動作を開始する。具体的には、ECU23は、例えば、ドア21の開軌道近辺における障害物の有無や現状のドア開度に応じて、どのような速度や加速度でドア21を開けるか等を決定し、ドア駆動ユニット22を制御してドア21を開動作させる。
次に、ステップS208において、ECU23は、ドア21の開度がドア可動角度に到達していないか否かを判定し、Yesの場合はステップS209に進み、Noの場合はステップS210に進む。
ステップS209において、ドア駆動ユニット22は、ドア21の自動開動作を実行する。
ステップS210において、ドア駆動ユニット22は、ドア21の自動開動作を終了する。つまり、一連のオートドア開動作を終了させる。
図6は、図4のステップS13の変形例であるステップS13aの処理の詳細を示すフローチャートである。上述のように、図6はイベント駆動型の場合の例である。ステップS201~S205、S207~S210は、図5と同様である。図5との違いは、ステップS31において、使用者によるオートドア開動作のコマンド入力が行われた後に、処理フローが始まる点と、ステップS206がない点である。
イベント駆動型の利点は、常時、信号処理を行う必要が無いので、車両1の電気エネルギー消費を抑えられる点である。ただし、使用者によるオートドア開動作の求めに対する開動作の即応性が低下する可能性がある。
次に、図7は、図5のステップS202の処理の詳細を示すフローチャートである。ステップS41において、DSP31の第1算出部53は、前処理として、ミリ波レーダ32による複数の受信結果に基づいて、物体の位置として検知点群を算出する。例えば、第1算出部53は、ミリ波レーダ32で捉えたIF信号から検知点群の距離・速度・角度を計算する。
ここで、検知点とは、ミリ波レーダ32に対し、反射波を送り返した3次元空間上の一点を指す。ミリ波レーダ32の一回の検知に対して、複数の検知点が現れるのが通常である(図8で後述)。これらを検知点群と呼称する。
検知点群には、実在する人や車両等の障害物を反映したものだけでなく、偽像や虚像と呼ばれるようなノイズ検知点も含まれることがある。ノイズ検知点は、ミリ波レーダ32が照射したミリ波が、路面や建物壁等の構造物によって多重反射された結果生まれることが多い。したがって、ノイズ検知点が現れている地点には、何も存在していないことがほとんどである。従来技術では、実在する障害物を反映する検知点とノイズ検知点を見分けることは容易ではなく、そのために障害物の有無の判別の精度が低かった。そこで、本実施形態では、以下のステップS42以降の処理を行うことで、障害物の有無の判別の精度を向上させる。なお、各ステップの処理の詳細については、図8以降で説明する。
ステップS42において、第2算出部54は、ステップS41で算出された検知点群を3次元座標へ座標変換し、3次元座標において検知点群に基づいて少なくとも一つの関心領域を設定する。
次に、ステップS43において、第2算出部54は、設定された関心領域における検知点群の特徴量を算出する。
次に、ステップS44において、第2算出部54は、特徴量に基づいて特徴ベクトルを算出する。
次に、ステップS45において、推定部55は、特徴ベクトルに基づいて、障害物の有無を判別する。
次に、図8、図9を参照して、検知点群の例について説明する。図8は、実施形態において障害物がある場合の検知点群の例を示す図である。図8は、障害物として三角コーン(灰色領域)を、ミリ波レーダ32の正面にあって、ドア21から60cm離れた場所に置いた条件での検知例である。
また、図9は、実施形態において障害物がない場合の検知点群の例を示す図である。図9は、ドア21の周囲に何もない条件での検知例である。
図8、図9において、X軸は車両の前後方向、Y軸は車両の左右方向、Z軸は天地の高さ方向に沿った座標軸である。また、各図における黒色破線は、オートドア(ドア21)の開軌道を示す。また、1つの円が、1つの検知点位置を表している。円の大きさと色は、その検知点における反射エネルギー値の大きさを示している。図8、図9のデータは、アスファルト路面上で得られたものである。図8、図9からわかるように、障害物が存在する場合でもしない場合でも、検知点群が現れている。
なお、IF信号から検知点群の距離・速度・角度を計算する処理過程については、ミリ波レーダ32の原理的部分であって、本実施形態の技術的特徴ではないので、説明を省略する。本処理過程の結果、各検知点について、ミリ波レーダ32の中心を原点とする3次元座標系(以下、レーダ座標系と称する。)の距離・速度・角度の極座標値と、反射エネルギー値が得られる。
障害物の有無の判別に利用するために変換する処理では、最初に、各検知点について、レーダ座標系から、当該ドアを中心とする3次元座標系(以下、ドア座標系と称する。)への座標変換を行う。ドア座標系の原点は、車両1のドア21の表面上にあって、障害物と衝突しやすい地点を選ぶと、ドア可動角度を計算し易い。その場合では、ドア21の内部に埋設したミリ波レーダ32の中心からのオフセットを解消する計算が必要である。また、ドア21の内部において、ミリ波レーダ32を傾けて設定している場合では、その傾きを解消する座標回転処理を行う。座標変換を行った後では、必要に応じて、直交座標系への変換、ノイズ低減処理を実施する。ノイズ低減処理は、上記ノイズ検知点を減らす目的で、例えば、時間的平均処理や空間的平均処理を施すとよい。
次に、図10、図11を参照して、関心領域の設定について説明する。図10は、実施形態において障害物がある場合の関心領域の設定例を示す図である。図11は、実施形態において障害物がない場合の関心領域の設定例を示す図である。図7のステップS42では、障害物の有無を判別するために、必要な空間を抽出する処理を行う。この空間を関心領域と呼ぶ。
図10は、図8に示した検知点群データを基に、関心領域ROIを設定した例を表している。また、図11は、図9に示した検知点群データを基に、関心領域ROIを設定した例を表している。これらの例では、検知点群の中で、最も高い反射エネルギー値を持った検知点を、関心領域ROIの中心(×印)と定めた。また、関心領域ROIの大きさは、一辺0.9mの立方体形状とした。
なお、関心領域の中心の決め方はこれに限定されず、ほかに、例えば、検知点群の3次元座標の重心、平均値、中間値等を採用する方法であってもよい。関心領域の中心の決め方や大きさは、例えば、後述の判別精度等に基づいて、任意に決定してよい。また、ドア21の周囲における複数の障害物の有無を判別するために、関心領域を2つ以上設定して、それぞれの関心領域について処理を行ってもよい。
次に、図12、図13を参照して、特徴量の抽出について説明する。図12は、実施形態において障害物がある場合に抽出した特徴量の例を示す図である。図13は、実施形態において障害物がない場合に抽出した特徴量の例を示す図である。
図7のステップS43では、障害物の有無を判別するための前段階処理として、関心領域中における検知点群の分布様式の特徴を抽出する処理を行う。図12は、図10に示した関心領域ROI内の各検知点のX/Y/Z座標値を基に、検知点群の分布様式の特徴を求めた例を示している。この例では、関心領域ROIの中心を基準として、0.1m毎に区間を設けて、各区間内に属する検知点群の最大反射エネルギー値を求め、ヒストグラム化した。図13は、図11に示した関心領域ROI内の各検知点について同様の処理を行ったものである。
図12と図13を比較すればわかるように、障害物があった場合の図12では、少なくとも(a)はヒストグラムが明瞭なピークを持ち、また、(b)と(c)は全体的にビン高が高い、といった傾向がある。一方、障害物がない場合の図13では、そのようなヒストグラムの明瞭なピークや全体的な高いビン高といった傾向がない(または小さい)。したがって、このような特徴量に基づいて障害物の有無を高精度に判別できることがわかる。
次に、図14を参照して、特徴ベクトルの例について説明する。図14は、実施形態において作成した特徴ベクトルの例を示す図である。図7のステップS44では、障害物の有無を判別するための前段階処理として、検知点群の分布様式から抽出した特徴量から特徴ベクトルを作成する処理を行う。
図14(a)は図12に対応する特徴ベクトルである。図14(b)は図13に対応する特徴ベクトルである。ここでは、抽出した特徴量を単純に繋ぐことで作成した特徴ベクトルを例示している。具体的には、3つの各ヒストグラムは9区間からなっていたので、作成した特徴ベクトルは27次元の長さとなった。
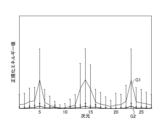
次に、図15は、実施形態における2つの特徴ベクトルを比較するためのグラフである。つまり、図15は、過去に蓄積した障害物ありと障害物なしの条件下での試験から得られた検知点群に基づく特徴ベクトルを比較のために重ねたグラフである。グラフG1は、障害物ありの条件において得られた特徴ベクトルの平均である。また、グラフG2は、障害物なしの条件において得られた特徴ベクトルの平均である。また、各グラフに対応する誤差棒は標準偏差を示す。また、各特徴ベクトルは、全特徴ベクトルの最大振幅を基準として、正規化されている。
ここで、障害物あり条件では、人、車両、階段、金属ポール、三角コーン、縁石等の障害物を、ドアから0.2m~1.4m離した位置に設置したときの検知データであった。両条件間には、特徴ベクトルの大きさや形状に明らかな違いを見つけることができる。
障害物の有無を判別するためには、このように特徴ベクトル間の差が明瞭になる様に、それらを作成することが重要である。必要に応じて、上記の例の様に単純に繋ぐだけでなく、特徴量エンジニアリングと呼ばれるような、これらの特徴量から新たな特徴量を作成する様な処理過程を加えてもよい。特徴量エンジニアリングとしては、例えば、エッジ強調処理などが考えられる。これによれば、エッジを強調することで、障害物の有無の判別精度がさらに向上する場合がある。
次に、図16を参照して、複数の機械学習器による物体の有無の判別性能について説明する。図16は、実施形態における複数の機械学習器による物体の有無の判別性能を示す比較表である。
図7のステップS45では、機械学習器を用いて、障害物の有無を判別する処理を行う。図16では、代表的な機械学習器であるLightGBM(Gradient Boosting Machine)、k近傍法、ランダムフォレスト法、決定木法、サポートベクタマシンを用いて、図15で例示した特徴ベクトル群を基に、障害物の有無を学習させ、判別を試験した結果を表す。
表中の数字は、10倍交差検定を行った上での各指標の平均値を示す。使用する機械学習器によって判別の正解率は異なり、最も低いのは、サポートベクタマシンを使った場合で、91.9%であった。最も高いのは、LightGBMを使った場合で、97.4%であった。
判別の再現率、適合率、F1といった指標についても、各機械学習器の性質を反映してか、精度にばらつきがあった。また、学習時間についても、1回当たり0.048秒から0.710秒まで大きな幅があった。なお、本計算には、標準的なWindows(登録商標)コンピュータを使用した。
これらの結果は、機械学習器を用いれば、ミリ波レーダ32で捉えた検知点群データの分布様式を基にして、オートドアの開動作の妨げる様な障害物が実際に存在するかどうかを非常に高い精度で判別可能であることを示唆する。機械学習器の選別には、車両1に搭載できるDSP31の性能を鑑みながら、より高い判別精度を、より短い学習および推定時間で達成できるものを選ぶとよいと考えられる。
また、どんなによい特徴量抽出や特徴量エンジニアリングを行っても、1回の判別で、常に正答率が100%となるような機械学習器を作ることは困難であるかもしれない。その場合には、過去の複数周期に得た判別結果を総合した上で、最終の判別を行うようにすればよい。例えば、1回の判別正答率が97%の機械学習器が、偽陽性および偽陰性の回答をする確率は3%あるが、2回連続で誤判別する確率は0.09%である。3回連続で誤判別する確率は、わずか0.0027%となる。この工夫を導入することで、障害物の有無の判別を、ほぼ100%の正答率で行えるようになると期待できる。
また、上記では単一の機械学習器を用いた障害物の有無の判別について述べてきたが、並列して複数の機械学習器を用いた判別を行い、合議をとるアンサンブル学習法を用いてもよい。その場合、判別のバイアスとバリアンスが最小化されるので、判別精度をさらに向上できる可能性がある。
次に、図17を参照して、図5のステップS204の処理の詳細について説明する。図17は、図5のステップS204の処理の詳細を示すフローチャートである。
ステップS204では、ドア21が障害物に衝突するまでに、まだ開動作を続けることができる余地があるかを見積もるためにドア可動角度を計算する処理を行う。ここでは、ドア可動角度=0となれば、ドア21は障害物に衝突することを意味する。
ステップS51において、DSP31の制御部56は、障害物の位置情報に基づいてドア可動角度を計算する。
また、ステップS52において、制御部56は、障害物の種類を判別する。
ここで、図18は、実施形態におけるドア可動角度の計算の説明図である。最初に、キー検知点を定めるところから始める。キー検知点は、ドア21に最も近い検知点を選ぶのが好適である。ただし、実際の障害物位置よりも手前に現れたノイズ検知点を選んでしまう可能性もあるので、例えば、ある閾値以上の反射エネルギー値をもった検知点の中で、ドア21と最近接のものを選ぶとすれば、この可能性を低減できる。
続けて、キー検知点のドア21からの距離(Y座標値)を基準として、仮想的な無限壁(y=ymin)を設定する。例えば、この無限壁と現在のドア21の位置との間に挟まれる空間を、ドア21の開動作を続けられる余地として定める。ただし、こうして定めると、ドア21のヒンジ側に存在する障害物ほど、開動作を続けられる余地が少な目に計算されてしまう問題が生じる。これは、ミリ波レーダ32は障害物の広がりまでを正確に検知することが困難という原理的問題に対処するための、安全上、有効な対応策である。
無限壁とドア21の開軌道(黒色破線)との交点(xp,ymin)と、ドアヒンジ(xH,0)と、ドア表面を用いて、図18に示す角度θpを、以下の(式1)を用いて可動角度として計算する。

次に、図19は、実施形態における検知点群の分布の統計量に基づく物体種類判別の説明図である。図17のステップS52では、検知点群の分布様式を基に、障害物の種類を判別する処理を行う。種類には様々なものが考えられるが、以下では、3種の判別方法を例示する。なお、障害物の種類判別は、これらを個別に実施した結果に基づかなければならないわけではなく、必要に応じて組み合わせてよい。
(種類判別法1)検知点群の分布の統計量に基づく判別
金属ポールのような幅や奥行きの小さい障害物(図19(a)の灰色部分)と、階段のような幅と奥行きが大きい障害物(図19(b)の灰色部分)とでは、検知点群の分布様式に違いがある。以下では、便宜的に、前者を単純形状、後者を複雑形状と称して、説明を続ける。
金属ポールのような幅や奥行きの小さい障害物(図19(a)の灰色部分)と、階段のような幅と奥行きが大きい障害物(図19(b)の灰色部分)とでは、検知点群の分布様式に違いがある。以下では、便宜的に、前者を単純形状、後者を複雑形状と称して、説明を続ける。
単純形状では、検知点群は狭い領域に限局して分布する。一方、複雑形状では、検知点群はある程度広がって分布する傾向がある。そこで、両者を分布の統計量にしたがって判別する。
例えば、以下の(式2)、(式3)を用いて、検知点群データの分散値(Vx、Vy、Vz)を計算する。ここで、Nは検知点群データ数、(xc、yc、zc)は分布の中心である。

そして、以下の式(4)に示すように、検知点群データの分散値(例えば、Vy)と閾値THD_Vyを比較し、閾値THD_Vyより小さい場合は単純形状、THD_Vyより大きい場合は複雑形状と判別する。
if (Vy<THD_Vy) (式4)
# 障害物は単純形状
else
# 障害物は複雑形状
# 障害物は単純形状
else
# 障害物は複雑形状
(種類判別法2)検知点群の分布の幾何学特徴に基づく判別
単純形状と複雑形状の検知点群の分布の違いは、上記の説明通りであるが、観点を変えて、両者を、その幾何学的特徴から判別する。
単純形状と複雑形状の検知点群の分布の違いは、上記の説明通りであるが、観点を変えて、両者を、その幾何学的特徴から判別する。
図20は、実施形態における検知点群の分布の幾何学的特徴に基づく物体種類判別の説明図である。例えば、YZ平面上での検知点群の分布様式から、以下の(式5)に示す最小二乗直線を求める。また、最小二乗直線の係数cとdは、(式6)を解くことで求められる。ここで、wiは重み付け係数であり、各検知点における反射エネルギーの正規化値を採用すると、その強弱を反映した最小二乗直線を求めることができる。

続いて、(式7)を用いて、(式5)の最小二乗直線の単位法線ベクトルNVoを計算する。また、(式8)を用いて、レーダ面の単位法線ベクトルNVR=(1,0)がなす角度θYZを計算する。

そして、式(9)に示すように、角度θYZと閾値区間[THD_θYZ1,THD_θYZ2]を比較し、その区間に入っている場合は単純形状、外れる場合は複雑形状と判別する。
if (THD_θYZ1)<θYZ ) and (θYZ<THD_θYZ2) (式9)
# 障害物は単純形状
else
# 障害物は複雑形状
if (THD_θYZ1)<θYZ ) and (θYZ<THD_θYZ2) (式9)
# 障害物は単純形状
else
# 障害物は複雑形状
(種類判別法3)検知点群の分布の反射エネルギー値に基づく判別
ミリ波レーダ32の原理的特徴として、レーダ断面積が狭く、反射し難い素材(例:プラスチック樹脂)であるほど、反射エネルギー値は小さく検知される。逆に、レーダ断面積が広く、反射し難い素材(例:鉄)であるほど、反射エネルギー値は大きく検知される。上記分類によれば、前者は単純形状、後者は複雑形状に相当する。そこで、反射エネルギー値に基づいて、判別する。
ミリ波レーダ32の原理的特徴として、レーダ断面積が狭く、反射し難い素材(例:プラスチック樹脂)であるほど、反射エネルギー値は小さく検知される。逆に、レーダ断面積が広く、反射し難い素材(例:鉄)であるほど、反射エネルギー値は大きく検知される。上記分類によれば、前者は単純形状、後者は複雑形状に相当する。そこで、反射エネルギー値に基づいて、判別する。
図21は、実施形態における検知点群の分布の反射エネルギー値に基づく物体種類判別の説明図である。この場合の判別法では、機械学習技術を使う。例えば、各検知データについて、図7のステップS41~S44と同様の処理を行って、単純形状に分類される障害物(例:金属ポール、三角コーン、縁石等)から得られた特徴ベクトルG12と、複雑形状に分類される障害物(例:人、車両、階段等)から得られた特徴ベクトルG11と、を比較すると、図21に示す様な違いがあった。なお、各グラフに対応する誤差棒は標準偏差を示す。
ここで、図22は、実施形態における複数の機械学習器による物体の種類の判別性能を示す比較表である。図7のステップS45と同様の処理を行って、過去データを学習させた機械学習器を使って、新規(未学習)データの種類判別を試みると、最高正解率85.4%で、単純形状と複雑形状とを判別できた。
図17に戻って、ステップS51、S52の後、ステップS53において、DSP31の制御部56は、ステップS51、S52の結果を総合して、任意に、最終的なドア可動角度を決定し、設定する処理を行う。
例えば、衝突しても損害は軽微と推測される単純形状の障害物では、計算されたままのドア可動角度で作動させるように決定することが可能である。逆に、衝突したら損害が重大と推測される複雑形状の障害物では、ドア可動角度を非常に小さくする(例えば、ポップアップ(ロックを外してドア21をフリーにする動作)のみを行う)ように決定することもできる。
このように、本実施形態のオートドアシステムSによれば、予め機械学習によって生成した物体検知モデルを用いることで、路面などの周辺環境によらず、車両1の周囲の障害物を高精度に検知することができる。
また、ドアを基準とする3次元座標で関心領域(図10、図11)を設定して検知点群の分布形状を示す特徴ベクトルを算出するというより具体的な処理を実現できる。
また、設定された開可動角度までドア21を開動作させることで、ドア21と障害物の衝突を回避するとともに、ドア21が不要に手前で開動作を停止する事態も回避できる。
また、車両の使用者は、ドア21の自動開動作要求に対応する所定の操作を行うことで、ドア21を開動作させることができる。
以上、本発明の実施形態を例示したが、上記実施形態および変形例はあくまで例であって、発明の範囲を限定することは意図していない。上記実施形態や変形例は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、組み合わせ、変更を行うことができる。また、実施形態や変形例の構成や形状は、部分的に入れ替えて実施することも可能である。
例えば、上述の実施形態では、オートドアシステムSは1つのECU23(図2)を有するものとしたが、これに限定されない。オートドアシステムSは複数のECUを有していてもよい。
また、DSP31の機能の一部(例えばモデル生成部52)は、ECU23が備えるようにしてもよい。
また、図20では、最小二乗直線を例にとったが、これに限定されず、最小二乗曲線や最小二乗曲面を使ってもよい。
また、物体検知センサは、ミリ波レーダに限定されず、ほかに、超音波センサなどの他の種類のセンサであってもよい。
また、新たに機械学習で判別した特徴ベクトルのデータを次の比較時の比較対象として更新してもよい。
また、上述の実施形態では、物体検知センサが設置される対象を車両10としたが、これに限定されない。物体検知センサが設置される対象は、移動によって周囲の環境が時々刻々と変化する移動ロボットなどの移動体全般である。
1…車両、2…オートドア部、3…センサ部、4…車載ネットワーク、5…処理部、6…記憶部、21…ドア、22…ドア駆動ユニット、23…ECU、31…DSP、32…ミリ波レーダ、51…取得部、52…モデル生成部、53…第1算出部、54…第2算出部、55…推定部、56…制御部、S…オートドアシステム
Claims (6)
- 車両のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得部と、
学習フェーズにおいて、
前記取得部によって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成部と、
推定フェーズにおいて、
前記取得部によって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出部と、
前記第1算出部によって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出部と、
前記第2算出部によって算出された前記特徴ベクトルと、前記物体検知モデルと、に基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定部と、を備える物体検知装置。 - 前記モデル生成部は、前記検知点群を前記センサが設置されたドアを基準とする3次元座標へ座標変換し、前記3次元座標において前記検知点群に基づいて少なくとも一つの関心領域を設定し、設定された前記関心領域における前記検知点群の分布形状を示す特徴ベクトルを算出して入力データとし、
前記第2算出部は、前記第1算出部によって算出された前記検知点群を前記3次元座標へ座標変換し、前記3次元座標において前記検知点群に基づいて少なくとも一つの関心領域を設定し、設定された前記関心領域における前記検知点群の分布形状を示す特徴ベクトルを算出する、請求項1に記載の物体検知装置。 - 前記ドアは、スイング式のドアであり、
前記物体検知装置は、前記ドアを開閉動作させる駆動部を制御する制御部を、さらに備え、
前記制御部は、前記推定部によって前記物体が障害物であることを示す情報が出力された場合に、当該障害物の位置情報に基づいて前記ドアの開可動角度を設定し、設定された前記開可動角度まで前記ドアが開動作するように前記駆動部を制御する、請求項1に記載の物体検知装置。 - 前記制御部は、前記車両の使用者による前記ドアの自動開動作要求に基づいて、設定された前記開可動角度まで前記ドアが開動作するように前記駆動部を制御する、請求項3に記載の物体検知装置。
- 車両のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得ステップと、
学習フェーズにおいて、
前記取得ステップによって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成ステップと、
推定フェーズにおいて、
前記取得ステップによって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出ステップと、
前記第1算出ステップによって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出ステップと、
前記第2算出ステップによって算出された前記特徴ベクトルと、前記物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定ステップと、を含む物体検知方法。 - 車両のスイング式のドアに設置されたセンサから送信された探査波が前記車両の周囲の物体で反射することで発生した反射波の複数の受信結果を取得する取得ステップと、
学習フェーズにおいて、
前記取得ステップによって取得された前記複数の受信結果に基づいて前記物体の位置として検知点群を算出し、前記検知点群の分布形状を示す特徴ベクトルと前記物体が障害物か否かを示す情報との関係性を機械学習することによって物体検知モデルを生成するモデル生成ステップと、
推定フェーズにおいて、
前記取得ステップによって取得された前記複数の受信結果に基づいて、前記物体の位置として検知点群を算出する第1算出ステップと、
前記第1算出ステップによって算出された前記検知点群に基づいて、前記検知点群の分布形状を示す特徴ベクトルを算出する第2算出ステップと、
前記第2算出ステップによって算出された前記特徴ベクトルと、前記物体検知モデルとに基づいて、当該物体が障害物か否かを判別し、判別結果を出力する推定ステップと、
前記推定ステップによって前記物体が障害物であることを示す情報が出力された場合に、当該障害物の位置情報に基づいて前記ドアの開可動角度を設定し、設定された前記開可動角度まで前記ドアが開動作するように、前記ドアを開閉動作させる駆動部を制御する制御ステップと、を含む物体検知方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022081850 | 2022-05-18 | ||
| JP2022-081850 | 2022-05-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023223765A1 true WO2023223765A1 (ja) | 2023-11-23 |
Family
ID=88834978
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/015771 WO2023223765A1 (ja) | 2022-05-18 | 2023-04-20 | 物体検知装置および物体検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023223765A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02132515U (ja) * | 1989-04-11 | 1990-11-02 | ||
| JP2010236196A (ja) * | 2009-03-30 | 2010-10-21 | Denso Corp | 車両ドア開度制御装置 |
| JP2020534617A (ja) * | 2017-09-22 | 2020-11-26 | ズークス インコーポレイテッド | 二次元画像および点群データからの三次元境界ボックス |
| DE102020107293A1 (de) * | 2020-03-17 | 2021-09-23 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Überwachen eines Schwenkbereichs einer Tür während eines Schwenkvorgangs, Computerprogrammprodukt, computerlesbares Speichermedium sowie Schwenkbereichsüberwachungssystem |
-
2023
- 2023-04-20 WO PCT/JP2023/015771 patent/WO2023223765A1/ja unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02132515U (ja) * | 1989-04-11 | 1990-11-02 | ||
| JP2010236196A (ja) * | 2009-03-30 | 2010-10-21 | Denso Corp | 車両ドア開度制御装置 |
| JP2020534617A (ja) * | 2017-09-22 | 2020-11-26 | ズークス インコーポレイテッド | 二次元画像および点群データからの三次元境界ボックス |
| DE102020107293A1 (de) * | 2020-03-17 | 2021-09-23 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Überwachen eines Schwenkbereichs einer Tür während eines Schwenkvorgangs, Computerprogrammprodukt, computerlesbares Speichermedium sowie Schwenkbereichsüberwachungssystem |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9983306B2 (en) | System and method for providing target threat assessment in a collision avoidance system on a vehicle | |
| JP5323766B2 (ja) | 道路の特定のレーン上に目標車両が存在する確率を見積もる方法 | |
| US8442755B2 (en) | Systems and methods for preventing motor vehicle side doors from coming into contact with obstacles | |
| JP3401913B2 (ja) | 車両用障害物認識装置 | |
| JP5910434B2 (ja) | 衝突予測装置 | |
| Schlegl et al. | Combined capacitive and ultrasonic distance measurement for automotive applications | |
| JPH09178848A (ja) | 車両用障害物認識装置 | |
| AU2007201110A1 (en) | Systems and methods for determining threshold warning distances for collision avoidance | |
| WO2006090736A1 (ja) | 物体認識装置 | |
| JPH1059120A (ja) | 障害物検知装置及びその装置を用いた乗員保護装置 | |
| JP6910545B2 (ja) | 物体検出装置及び物体検出方法 | |
| CN111103587A (zh) | 用于预测同时并线车辆的方法和设备及包括其的车辆 | |
| US11837095B2 (en) | Alarm device for vehicle | |
| CN110888115B (zh) | 对雷达跟踪的潜在静止对象进行分类 | |
| JP5078727B2 (ja) | 物体検知装置 | |
| WO2023223765A1 (ja) | 物体検知装置および物体検知方法 | |
| US11631255B2 (en) | Apparatus and method for controlling door opening | |
| JP3473405B2 (ja) | 車両用後方モニタシステム | |
| CN107003405B (zh) | 用于检测机动车辆的传感器装置由物体屏蔽的方法、计算装置、驾驶员辅助系统和机动车辆 | |
| US11948367B2 (en) | Multi-object tracking for autonomous vehicles | |
| US20230324545A1 (en) | Object detection device and object detection method | |
| JP3527945B2 (ja) | 走行車両検出装置及びその方法 | |
| CN113706887B (zh) | 用于后方交叉碰撞警告的方法和装置 | |
| CN114999224B (zh) | 一种电单车及其环境智能感测避障方法、存储介质 | |
| US20230251374A1 (en) | Object detection apparatus and object detection method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23807377 Country of ref document: EP Kind code of ref document: A1 |