WO2023189344A1 - 電動作業機 - Google Patents
電動作業機 Download PDFInfo
- Publication number
- WO2023189344A1 WO2023189344A1 PCT/JP2023/008995 JP2023008995W WO2023189344A1 WO 2023189344 A1 WO2023189344 A1 WO 2023189344A1 JP 2023008995 W JP2023008995 W JP 2023008995W WO 2023189344 A1 WO2023189344 A1 WO 2023189344A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotation speed
- electric motor
- temperature
- hydraulic oil
- hydraulic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2062—Control of propulsion units
- E02F9/207—Control of propulsion units of the type electric propulsion units, e.g. electric motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/003—Supplying electric power to auxiliary equipment of vehicles to auxiliary motors, e.g. for pumps, compressors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/40—Working vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/36—Temperature of vehicle components or parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
Definitions
- the present invention relates to an electric working machine driven by the power of an electric motor.
- Patent Document 1 discloses an electric working machine driven by the power of an electric motor.
- the electric working machine disclosed in Patent Document 1 includes an electric motor driven by electric power output from a battery unit, a hydraulic pump driven by the electric motor to discharge hydraulic oil, and driven by the hydraulic oil discharged by the hydraulic pump.
- the vehicle is equipped with hydraulic equipment, a working device operated by the hydraulic equipment, an operating device that operates the hydraulic equipment, a control device that controls the rotational speed of the electric motor, and the like.
- the control device sets the rotation speed of the electric motor according to the operation of the operating device when the output current value from the battery unit is equal to or higher than a predetermined value, and when the output current value from the battery unit is less than the predetermined value. Then, the rotational speed of the electric motor is set to a predetermined idling rotational speed.
- the present invention was made to solve the problems of the above-mentioned prior art, and aims to reduce wasteful power consumption in electric working machines and improve work efficiency.
- An electric working machine includes a body, a battery unit mounted on the body, an electric motor driven by electric power from the battery unit, and a hydraulic device operated by the power from the electric motor.
- a working device operated by hydraulic pressure of hydraulic fluid supplied from the hydraulic equipment; a control device controlling drive of the electric motor; a first position for permitting operation of the working device; and a first position for permitting operation of the working device;
- the control device includes a switching member that can be switched to one of the second positions that does not permit, and an oil temperature detection device that detects the temperature of the hydraulic oil.
- the rotation speed of the electric motor is changed to a predetermined value corresponding to a stopped state of the electric motor. Control to the first rotation speed.
- the control device is configured to change the rotation speed of the electric motor to the second position when the switching member is switched to the second position and the temperature of the hydraulic oil is not within the permissible temperature range.
- the idling rotation speed may be controlled to a predetermined idling rotation speed that is greater than 1 rotation speed and less than or equal to the lower limit of the rotation speed when working with the working device.
- the control device controls the rotation speed of the electric motor to a predetermined value if the temperature of the hydraulic fluid is lower than the allowable temperature range. If the temperature of the hydraulic oil is higher than the allowable temperature range, the rotation speed of the electric motor is controlled to match the third rotation speed, and if the temperature of the hydraulic oil is higher than the allowable temperature range, the rotation speed of the electric motor is controlled to match the third rotation speed.
- the rotation speed may be controlled to the second rotation speed.
- the electric working machine includes a work detection device that detects whether or not the work device is in operation based on the hydraulic pressure of the hydraulic oil, and the second rotation speed is such that the work detection device can detect whether or not the work device is in operation.
- the rotation speed may be set to a value that can generate a hydraulic pressure of the hydraulic oil.
- the control device is configured to control whether the temperature of the hydraulic fluid is lower than the allowable temperature range when the switching member is in the first position and the working device is not operated for a predetermined time or more while the electric motor is being driven. For example, the number of revolutions of the electric motor is controlled to match the third number of revolutions, and if the temperature of the hydraulic oil is equal to or higher than the allowable temperature range, the number of revolutions of the electric motor is controlled to match the second number of revolutions. May be controlled.
- the electric working machine includes an instruction member that is operated to instruct the number of rotations of the electric motor, and the control device controls the number of rotations of the electric motor that can be instructed by operating the instruction member. It may be set according to the temperature.
- the electric working machine includes a selection member that selects either a first mode or a second mode that reduces power consumption more than the first mode, and the control device is configured such that the temperature of the hydraulic fluid is set to the allowable temperature. If it is within the range, when the second mode is selected by the selection member, the upper limit of the instruction range of the rotation speed of the electric motor by the operation of the instruction member is determined by the selection member when the first mode is selected. It may be set smaller than the upper limit of the specified range when selected.
- the control device controls whether the first mode or the second mode is selected by the selection member.
- An upper limit value of the instruction range of the rotation speed of the electric motor by the operation of a member is set to a value smaller than a predetermined maximum rotation speed, and the maximum rotation speed is set when the temperature of the hydraulic fluid is within the permissible temperature range and
- the rotation speed may be an upper limit value of the rotation speed that can be instructed by the instruction member when the first mode is selected.
- the control device is configured to control whether the first mode or the second mode is selected by the selection member when the temperature of the hydraulic oil is higher than a predetermined second temperature that is higher than the allowable temperature range.
- the rotation speed that can be specified by the instruction member may be set to the third rotation speed.
- the electric working machine includes a cooling device that cools the hydraulic fluid, and the control device drives the cooling device when the temperature of the hydraulic fluid detected by the oil temperature detection device is higher than the permissible temperature range.
- the hydraulic fluid may be cooled by doing so, and the cooling device may be stopped when the temperature of the hydraulic fluid is below the allowable temperature range.
- the electric working machine includes an inverter that adjusts the electric power supplied from the battery unit to the electric motor, a rotation speed detection device that detects the rotation speed of the electric motor, and a work operation member that operates the operation of the work device. and, the switching member includes an unloading operation member that can be operated to switch between a loading position that permits operation of the working device and an unloading position that does not permit operation of the working device, and The device may control the rotation speed of the electric motor by adjusting the power supplied from the inverter to the electric motor based on the rotation speed of the electric motor detected by the rotation speed detection device. .
- wasteful power consumption in the electric working machine can be reduced and work efficiency can be improved.
- FIG. 3 is a diagram showing an example of a control map for the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor. It is a flowchart which shows the control operation of the rotation speed of an electric motor.
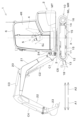
- FIG. 2 is an overall side view of the electric working machine.
- FIG. 5 is an overall side view of the electric working machine 1.
- the electric working machine 1 is an excavator called a backhoe.
- the electric working machine 1 includes a machine body (swivel base) 2, a traveling device 10, a working device 20, and the like. Further, the electric working machine 1 includes an electric motor 9 (FIG. 1) as a prime mover, and is operated by the power of the electric motor 9.
- a driver's seat 4 on which an operator (worker) is seated, and a protection mechanism 6 that protects the driver's seat 4 from the front, back, left and right, and above are provided on the body 2 of the electric working machine 1.
- the protection mechanism 6 is called a cabin.
- Each side of the protection mechanism 6 is provided with a transparent portion (so-called window) through which the surroundings can be viewed from the driver's seat 4.
- the protection mechanism 6 partitions the interior space where the driver's seat 4 is provided from the outside.
- An operating device 5 for operating the electric working machine 1 is provided around the driver's seat 4 inside the protection mechanism 6.
- the operator can operate the operating device 5 while seated in the driver's seat 4.
- the working device 20 side (direction of arrow A1 in FIG. 5) with respect to the protection mechanism 6 will be described as the front, and the opposite side (direction of arrow A2 in FIG. 5) will be described as the rear.
- the horizontal direction perpendicular to the front-rear direction will be referred to as the width direction.
- the left side will be described as the left side
- the right side will be referred to as the right side.
- the traveling device 10 supports the aircraft body 2 so that it can travel.
- the traveling device 10 includes a traveling frame (truck frame) 11 and a traveling mechanism 12.
- the traveling frame 11 is a structure around which the traveling mechanism 12 is attached and which supports the body 2 on the upper part.
- the traveling mechanism 12 is, for example, a crawler type traveling mechanism.
- the traveling mechanism 12 is provided on the left and right sides of the traveling frame 11, respectively.
- the traveling mechanism 12 includes an idler 13, a drive wheel 14, a plurality of rolling wheels 15, an endless crawler belt 16, and traveling motors ML and MR.
- the idler 13 is arranged at the front of the traveling frame 11.
- the drive wheels 14 are arranged at the rear of the traveling frame 11.
- the plurality of rolling wheels 15 are provided between the idler 13 and the drive wheel 14.
- the crawler belt 16 is wound around the idler 13, the drive wheel 14, and the wheel 15.
- the left travel motor ML is included in the travel mechanism 12 on the left side of the travel frame 11.
- the right travel motor MR is included in the travel mechanism 12 on the right side of the travel frame 11.
- These travel motors ML and MR are composed of hydraulic motors.
- the driving wheels 14 are rotationally driven by the power of the traveling motors ML and MR, and the crawler belt 16 is caused to circulate in the circumferential direction.
- a dozer device 18 is attached to the front of the traveling device 10.
- the dozer device 18 swings up and down by the expansion and contraction of the dozer cylinder C5.
- the dozer cylinder C5 is attached to the traveling frame 11.
- the dozer cylinder C5 is composed of a hydraulic cylinder.
- the body 2 is supported on a traveling frame 11 via a swing bearing 3 so as to be rotatable around a swing axis X.
- a swing motor MT is provided inside the fuselage 2.
- the swing motor MT is composed of a hydraulic motor (hydraulic actuator included in hydraulic equipment).
- the aircraft body 2 turns around the turning axis X by the power of the turning motor MT.
- the working device 20 is supported at the front of the machine body 2.
- the work device 20 includes a boom 21, an arm 22, a bucket (work tool) 23, and hydraulic cylinders C1 to C5.
- the base end side of the boom 21 is pivotally attached to a swing bracket 24 so as to be rotatable around a horizontal axis (an axis extending in the width direction of the body 2). Therefore, the boom 21 is able to swing vertically (vertically).
- the arm 22 is pivotally attached to the distal end side of the boom 21 so as to be rotatable about a horizontal axis. Therefore, the arm 22 can swing in the front-back direction or the up-down direction.
- the bucket 23 is provided on the tip side of the arm 22 so as to be capable of scooping and dumping operations.
- the swing bracket 24 swings left and right due to the expansion and contraction of the swing cylinder C1 provided inside the fuselage 2.
- the boom 21 swings up and down (back and forth) as the boom cylinder C2 expands and contracts.
- the arm 22 swings up and down (back and forth) due to the expansion and contraction of the arm cylinder C3.
- the bucket 23 performs a scooping operation and a dumping operation by expanding and contracting a bucket cylinder (work implement cylinder) C4.
- the swing cylinder C1, boom cylinder C2, arm cylinder C3, and bucket cylinder C4 are composed of hydraulic cylinders.
- the electric working machine 1 drives a traveling device 10 with traveling motors ML and MR, drives a working device 20 with hydraulic cylinders C1 to C5, and rotates the machine body 2 with a swing motor MT to perform work such as excavation.
- Hydraulic actuators such as travel motors ML and MR, swing motor MT, and hydraulic cylinders C1 to C5 are included in the hydraulic equipment.
- the traveling device 10 are working devices included in the electric working machine 1.
- the working device 20 and the traveling device 10 will be collectively referred to as "working devices 20, 10.”
- FIG. 1 is an electrical block diagram of the electric working machine 1.
- the control device 7 includes a CPU 7a and a storage section 7b.
- the CPU 7a controls the operation of each part included in the electric working machine 1 shown in FIG.
- the storage section 7b is composed of volatile memory, nonvolatile memory, and the like. Information, data, programs, etc. for the CPU 7a to control the operations of each section are stored in the storage section 7b in a readable and writable manner.
- the operating device 5 has operating members such as a work operating lever 5a, a traveling operating lever 5b, an unloading lever 5c, an accelerator dial 5d, and a mode selection SW (switch) 5e.
- the operating device 5 also includes a potentiometer, a switch, a sensor, or the like (not shown) for detecting whether or not each of the operating members 5a to 5e is operated, the operating position, or the operating amount.
- the work operation lever 5a is a member that operates the operation of the work device 20.
- the traveling operation lever 5b is a member that operates the traveling device 10.
- the work operation lever 5a and the traveling operation lever 5b are each shown as one block, but in reality, a plurality of each of the work operation lever 5a and the traveling operation lever 5b are provided. .
- the work operation lever 5a and the travel operation lever 5b are examples of the "work operation member" of the present invention.
- the unloading lever 5c can be switched between a loading position (first position) that allows the operation of the working device 20 and an unloading position (second position) that does not allow (prohibits) the operation of the working device 20. It is a great member.
- the unload lever 5c is installed, for example, on the side of the driver's seat 4 (FIG. 5) so as to be able to swing up and down.
- the unloading lever 5c is an example of the "unloading operation member" of the present invention. Further, the unload lever 5c is an example of a configuration included in the "switching member" of the present invention.
- the accelerator dial 5d is rotated to indicate the rotation speed of the electric motor 9.
- the angular range in which the accelerator dial 5d can be rotated corresponds to the instruction range in which the rotation speed of the electric motor 9 can be specified. Therefore, by changing the operation position of the accelerator dial 5d, the instruction value of the rotation speed of the electric motor 9 can also be changed.
- the control device 7 calculates the instruction value of the rotation speed of the electric motor 9 according to the operating state (whether or not the accelerator dial 5d is operated and the operating position) of the accelerator dial 5d.
- the accelerator dial 5d is an example of the "instruction member" of the present invention.
- the mode selection SW 5e selects either a normal mode (first mode) for controlling the drive of the electric motor 9 or an ECO mode (ecology mode, second mode) that reduces power consumption more than the normal mode. This is a switch operated to make a selection.
- the mode selection SW5e is an example of the "selection member" of the present invention.
- a starter SW (switch) 8 is provided inside the protection mechanism 6 and can be operated by an operator seated in the driver's seat 4. Starter SW8 is operated to start or stop electric working machine 1. Specifically, by turning on the starter SW8, the control device 7 starts each part of the electric working machine 1. Further, by turning off the starter SW8, the control device 7 stops each part of the electric working machine 1.
- the electric motor 9 is a drive source (an example of a prime mover) of the electric working machine 1, and is composed of, for example, a three-phase AC synchronous motor with an embedded permanent magnet.
- the inverter 38 is a motor drive device that drives the electric motor 9. Inverter 38 is connected to electric motor 9 and junction box 39.
- junction box 39 is connected to the battery unit 30, the DC-DC converter 40, and the charging port 41.
- Junction box 39 outputs the power output from battery unit 30 to inverter 38 and DC-DC converter 40.
- the inverter 38 converts the DC power input from the battery unit 30 via the junction box 39 into three-phase AC power, and supplies the three-phase AC power to the electric motor 9. As a result, the electric motor 9 is driven. Further, the inverter 38 can arbitrarily adjust the current and voltage of the electric power supplied to the electric motor 9.
- the control device 7 controls the operation of the inverter 38 to drive or stop the electric motor 9.
- the rotation speed detection device 42 includes a sensor, an encoder, a pulse generator, etc. that detects the rotation speed (actual rotation speed) of the electric motor 9.
- the control device 7 controls the driving of the electric motor 9 by the inverter 38 based on the rotation speed (actual rotation speed) of the electric motor 9 detected by the rotation speed detection device 42, for example. More specifically, the control device 7 determines whether the actual rotation speed of the electric motor 9 detected by the rotation speed detection device 42 matches the target rotation speed (a value indicated by the accelerator dial 5d or a predetermined rotation speed R1 to R3 described later). The drive of the electric motor 9 is controlled by the inverter 38 so as to do so.
- the DC-DC converter 40 is a voltage converter that converts the voltage of the direct current input from the battery unit 30 via the junction box 39 into a different voltage.
- the DC-DC converter 40 is a step-down converter that converts the high voltage of the battery unit 30 to a predetermined low voltage depending on the electrical components included in the electric working machine 1.
- the DC-DC converter 40 supplies power to the low voltage battery 33 after voltage conversion.
- Electrical components included in the electric working machine 1 include lighting, a heater, and the like in addition to the parts shown in FIG.
- the charging port 41 includes a connector (not shown) into which a charging cable (not shown) is fitted, and a connection detection device 41a.
- the charging port 41 is connected to an external power source (such as a commercial power source) via a charging cable.
- the connection detection device 41a includes a sensor and the like that detects that the charging cable is fitted into the charging port 41 and an external power source is connected.
- the junction box 39 outputs power input from the external power source through the charging port 41 via the charging cable to the battery unit 30.
- the battery unit 30 is charged with power input from the charging port 41 via the junction box 39 .
- the battery unit 30 has a plurality of battery packs 31 and 32.
- Each of the battery packs 31 and 32 is a secondary battery (storage battery) such as a lithium ion battery that includes at least one battery.
- the plurality of batteries are electrically connected in series and/or in parallel.
- the batteries constituting each of the battery packs 31 and 32 have a plurality of cells inside, and the plurality of cells are electrically connected in series and/or in parallel.
- Each of the battery packs 31 and 32 has an electrical capacity that allows each part of the electric working machine 1 to operate for a predetermined period of time.
- the battery packs 31 and 32 are connected in parallel.
- the battery unit 30 is provided with two battery packs 31 and 32, but the number of battery packs that the battery unit 30 has is not limited to two, and may be one or three or more. good.
- Each battery pack 31, 32 is provided with a connection switching section 31a, 32a.
- Each of the connection switching units 31a and 32a is composed of, for example, a relay or a switch, and can be switched between a connected state and a disconnected state.
- the control device 7 switches one of the connection switching units 31a and 32a to the connected state and the other connection switching unit to the disconnected state, thereby switching one of the plurality of battery packs 31 and 32. Power is output from one battery pack to the junction box 39, and power output from the other battery pack is stopped. That is, the control device 7 controls the output and stop of the power output of each battery pack 31, 32.
- control device 7 switches the connection state inside the junction box 39 to connect or disconnect the inverter 38, DC-DC converter 40, or charging port 41 to each battery pack 31, 32.
- Junction box 39 and connection switching units 31a and 32a are connection switching devices that switch connection and disconnection of inverter 38, DC-DC converter 40, and charging port 41 to each battery pack 31 and 32.
- each battery pack 31, 32 is provided with a BMU (battery management unit) 31b, 32b.
- BMU battery management unit
- the BMUs 31b and 32b are provided in the corresponding battery packs 31 and 32, but the BMUs 31b and 32b may be built in the corresponding battery packs 31 and 32, or It may be installed outside.
- the BMU 31b monitors and controls the corresponding battery pack 31.
- BMU 32b monitors and controls the corresponding battery pack 32.
- the BMUs 31b and 32b control opening and closing of relays provided inside the battery packs 31 and 32 to control start and stop of power supply from the battery packs 31 and 32.
- the BMUs 31b and 32b detect the temperature, voltage, and current of the battery packs 31 and 32, or the terminal voltages of internal cells.
- the BMUs 31b and 32b detect the remaining capacity (remaining power amount) of the battery packs 31 and 32 using a voltage measurement method, for example, based on the terminal voltage of the cells inside the battery packs 31 and 32.
- the method for detecting the remaining capacity of the battery packs 31 and 32 is not limited to the voltage measurement method, and may be other methods such as a coulomb counter method, a battery cell modeling method, an impedance track method, etc. .
- a capacity detection section for detecting the remaining capacity of the battery packs 31 and 32 may be provided separately from the BMUs 31b and 32b.
- the low voltage battery 33 is a storage battery with a lower voltage than the battery unit 30.
- the low voltage battery 33 is charged by power supplied from the DC-DC converter 40.
- the low-voltage battery 33 supplies power to electrical components included in the electric working machine 1 .
- the radiator 35 cools cooling water for cooling high heat generation electric devices such as the electric motor 9, the inverter 38, the DC-DC converter 40, and the battery unit 30.
- a high-heat-generating electrical device is an electrical device that generates higher heat than other electrical devices included in the electric working machine 1 by operating on electric power. Cooling water is not just water, but also a liquid that does not freeze, even in cold regions.
- the radiator 35 includes a fan motor 35a, and a radiator fan and a heat exchanger (not shown) that are rotationally driven by the power of the fan motor 35a.
- the fan motor 35a is driven by power from the low voltage battery 33.
- the cooling pump 36 is provided in a cooling water channel (not shown) disposed within the fuselage 2, together with the radiator 35 and the above-mentioned high heat generating electrical equipment.
- the cooling pump 36 discharges and circulates cooling water to the cooling water channel.
- the oil cooler 37 cools the hydraulic oil that has passed through hydraulic equipment such as the aforementioned hydraulic actuators ML, MR, MT, and C1 to C5, as well as hydraulic pumps P1, P2, and control valves CV (shown in FIG. 2, etc.) described later.
- the oil cooler 37 includes a fan motor 37a, and an oil cooler fan and a heat exchanger (not shown) that are rotationally driven by the power of the fan motor 37a.
- the fan motor 37a is driven by power from the low voltage battery 33.
- the oil cooler 37 is an example of the "cooling device" of the present invention.
- the display device 43 is composed of a liquid crystal display or a touch panel, and displays various information.
- the oil temperature detection device 44 includes a sensor that detects the temperature of hydraulic oil.
- hydraulic oil temperature the temperature of the hydraulic oil will be referred to as "hydraulic oil temperature.”
- the AI (auto idling)-SW (switch) 45 is composed of a pressure sensor that is activated by the hydraulic pressure of hydraulic oil.
- the AI-SW 45 is turned on when at least one of the working devices 20, 10 is operating, and is turned off when neither of the working devices 20, 10 is operating. That is, the AI-SW 45 detects whether the working devices 20, 10 are in operation.
- the AI-SW 45 is an example of the "work detection device" of the present invention.
- FIG. 2 is a diagram showing a hydraulic circuit K provided in the electric working machine 1.
- the hydraulic circuit K includes hydraulic actuators C1 to C5, ML, MR, MT, control valve CV, hydraulic pumps P1 and P2, hydraulic oil tank 48, oil cooler 37, operation valves PV1 to PV6, unload valve 58, and oil. Hydraulic equipment such as a passageway 50 is provided.
- These hydraulic pumps P1 and P2 are driven by the power of an electric motor 9.
- the hydraulic pump P1 for operation sucks the hydraulic oil stored in the hydraulic oil tank 48, and then discharges the hydraulic oil toward the control valve CV.
- one hydraulic pump P1 for operation is illustrated for convenience, but the hydraulic pump P1 for operation is not limited to this, and can supply hydraulic oil to each of the hydraulic actuators C1 to C5, ML, MR, and MT. An appropriate number may be provided.
- the control hydraulic pump P2 outputs hydraulic pressure for signals, control, etc. by suctioning and discharging hydraulic oil stored in the hydraulic oil tank 48. That is, the control hydraulic pump P2 supplies (discharges) pilot oil. An appropriate number of control hydraulic pumps P2 may also be provided.
- the control valve CV has a plurality of control valves V1 to V8.
- Each of the control valves V1 to V8 controls (adjusts) the flow rate of hydraulic oil output from the hydraulic pumps P1 and P2 to each of the hydraulic actuators C1 to C5, ML, MR, and MT.
- the swing control valve V1 controls the flow rate of hydraulic oil supplied to the swing cylinder C1.
- Boom control valve V2 controls the flow rate of hydraulic oil supplied to boom cylinder C2.
- Arm control valve V3 controls the flow rate of hydraulic oil supplied to arm cylinder C3.
- Bucket control valve V4 controls the flow rate of hydraulic oil supplied to bucket cylinder C4.
- Dozer control valve V5 controls the flow rate of hydraulic oil supplied to dozer cylinder C5.
- the left travel control valve V6 controls the flow rate of hydraulic oil supplied to the left travel motor ML.
- the right travel control valve V7 controls the flow rate of hydraulic oil supplied to the right travel motor MR.
- Swing control valve V8 controls the flow rate of hydraulic oil supplied to swing motor MT.
- the operation valves (remote control valves) PV1 to PV6 are operated in response to operation of operation levers 5a and 5b (FIG. 1) provided on the operation device 5.
- the pilot oil acts on each of the control valves V1 to V8 in proportion to the operating amount (operated amount) of each of the control valves PV1 to PV6, so that the spool of each of the control valves V1 to V8 moves straight.
- hydraulic oil at a flow rate proportional to the amount of movement of the spool of each control valve V1 to V8 is supplied to the hydraulic actuators C1 to C5, ML, MR, and MT to be controlled.
- each hydraulic actuator C1-C5, ML, MR, MT is driven according to the amount of hydraulic oil supplied from each control valve V1-V8.
- the oil passage 50 is composed of, for example, a hose or a pipe made of a material such as metal.
- the oil passage 50 is a flow passage that connects each part provided in the hydraulic circuit K and allows hydraulic oil or pilot oil to flow to each part.
- the oil passage 50 includes a first oil passage 51 , a second oil passage 52 , a first suction oil passage 54 , a second suction oil passage 55 , and a restriction oil passage 57 .
- the first suction oil passage 54 is a passage through which the hydraulic oil sucked from the hydraulic oil tank 48 by the hydraulic pump P1 for operation flows.
- the second suction oil passage 55 is a passage through which hydraulic oil sucked from the hydraulic oil tank 48 by the control hydraulic pump P2 flows.
- the first oil passage 51 is a flow passage through which hydraulic oil discharged by the hydraulic pump P1 for operation flows toward the control valves V1 to V8 of the control valve CV.
- the first oil passage 51 branches into a plurality of parts within the control valve CV and is connected to each of the control valves V1 to V8.
- the second oil passage 52 is a passage through which the hydraulic oil that has passed through the control valves V1 to V8 flows toward the hydraulic oil tank 48.
- the hydraulic oil tank 48 stores hydraulic oil.
- the second oil passage 52 includes a reciprocating oil passage 52a and a discharge oil passage 52b.
- a plurality of reciprocating oil passages 52a are provided so as to connect each control valve V1 to V8 and the hydraulic actuators C1 to C5, ML, MR, and MT to be controlled in pairs.
- the reciprocating oil passage 52a supplies hydraulic oil from the connected control valves V1 to V8 to the hydraulic actuators C1 to C5, ML, MR, and MT, and supplies hydraulic oil from the hydraulic actuators C1 to C5, ML, MR, and MT to the control valves V1 to V8.
- This is a flow path that returns hydraulic oil to the V8.
- One end of the discharge oil passage 52b branches into a plurality of branches and is connected to each of the control valves V1 to V8.
- the other end of the discharge oil path 52b is connected to the hydraulic oil tank 48.
- a part of the hydraulic oil that has flowed to any of the control valves V1 to V8 through the first oil passage 51 passes through the control valves V1 to V8, passes through one of the reciprocating oil passages 52a, and is directed to the hydraulic actuator to be controlled.
- Supplied to C1 to C5, ML, MR, and MT Supplied to C1 to C5, ML, MR, and MT.
- the hydraulic fluid discharged from the hydraulic actuators C1 to C5, ML, MR, and MT returns to the connected control valves V1 to V8 through the other side of the reciprocating oil passage 52a, and passes through the control valves V1 to V8.
- the discharge oil passage 52b flows.
- the other part of the hydraulic oil that has flowed to any of the control valves V1 to V8 through the first oil passage 51 is not supplied to the hydraulic actuators C1 to C5, ML, MR, and MT, and is not supplied to the control valve V1 to V8.
- ⁇ V8 and flows into the discharge oil path 52b.
- An oil cooler 37 is provided in the discharge oil path 52b. The oil cooler 37 cools the hydraulic oil flowing from any of the control valves V1 to V8 through the discharge oil path 52b.
- the hydraulic oil cooled by the oil cooler 37 returns to the hydraulic oil tank 48 through the discharge oil path 52b.
- the oil passages 54, 51, and 52 supply hydraulic oil to the hydraulic oil tank 48, the hydraulic pump P1, and the control valves V1 to V8 of the control valves CV (some of the hydraulic oil is supplied to the hydraulic actuators C1 to C5, ML). , MR, and MT).
- the restricted oil passage 57 is a passage through which the hydraulic oil discharged by the control hydraulic pump P2 flows to the operation valves PV1 to PV6.
- One end of the restriction oil passage 57 is connected to the control hydraulic pump P2, and the other end branches into a plurality of ports and is connected to the primary side ports (primary ports) of each of the operating valves PV1 to PV6.
- the restriction oil passage 57 is provided with an unload valve 58 consisting of a two-position switching valve.
- the unload valve 58 is switched to either the first position 58a or the second position 58b in conjunction with the operation of the unload lever 5c (FIG. 1).
- hydraulic oil is supplied from the operating hydraulic pump P1 to the hydraulic actuators C1 to C5, ML, MR, MT, and the hydraulic actuators C1 to C5, ML, MR, MT , the working device 20, and the traveling device 10 are permitted to operate.
- the unload valve 58 is switched to the first position (oil supply position, load position) 58a by the control device 7, and the control hydraulic pressure is
- the hydraulic oil discharged from the pump P2 to the restriction oil passage 57 is supplied to the control valves PV1 to PV6, and the control valves V1 to V8 become operable.
- the hydraulic actuators C1 to C5, ML, MR, MT, the working device 20, and the traveling device 10 can also be operated, and the operation of each of these parts C1 to C5, ML, MR, MT, 20, and 10 is permitted.
- the hydraulic oil discharged from the operation valves PV1 to PV6 returns to the hydraulic oil tank 48 through another discharge oil path (not shown).
- the unload valve 58 is switched to the second position (oil cutoff position, unload position) 58b by the control device 7, and the control
- the hydraulic oil discharged from the hydraulic pump P2 to the restricted oil passage 57 is no longer supplied to the control valves PV1 to PV6, and the control valves V1 to V8 become inoperable (operation prohibited state).
- the hydraulic actuators C1 to C5, ML, MR, MT, the working device 20, and the traveling device 10 are also rendered inoperable, and the operation of each of these parts C1 to C5, ML, MR, MT, 20, and 10 is permitted. It disappears.
- the unload lever 5c but also the unload valve 58 is an example of a configuration included in the "switching member" of the present invention.
- the hydraulic circuit K is provided with an operation detection oil passage (not shown) for detecting the operation state of the control valves V1 to V8.
- the operation detection oil path is an oil path that returns pilot oil discharged from the control hydraulic pump P2 to the hydraulic oil tank 48 through a plurality of switching valves for respectively switching the positions of the control valves V1 to V8. be.
- an AI-SW 45 (FIG. 1) is connected to the upstream side of the control valve V1 disposed closest to the control hydraulic pump P2 side.
- the AI-SW 45 When any of the control valves V1 to V8 is operated from the neutral position to the switching position, a part of the operation detection oil passage is shut off, and the pressure of the pilot oil in the operation detection oil passage increases to a certain degree ( (so-called pressurized state), the AI-SW 45 is turned on. That is, the AI-SW 45 detects that at least one of the working devices 20, 10 is in operation. In addition, when the control valves V1 to V8 are all in the neutral position, the operation detection oil passage is opened, so the pressure of the pilot oil in the operation detection oil passage does not rise to a certain level (so-called pressure rises). ), the AI-SW 45 is turned off. That is, the AI-SW 45 detects that the working devices 20 and 10 are not in operation.
- FIG. 3 is a diagram showing an example of a control map for the rotation speed of the electric motor 9.
- the control map in FIG. 3 graphically shows the correlation between the control value of the rotation speed of the electric motor 9 and the hydraulic oil temperature.
- the horizontal axis of the control map in FIG. 3 indicates the hydraulic oil temperature [° C.], and the vertical axis indicates the rotation speed [rpm] of the electric motor 9.
- Data representing the control map in FIG. 3 is stored in advance in the storage unit 7b (FIG. 1) of the control device 7.
- the control device 7 determines whether the hydraulic oil temperature T detected by the oil temperature detection device 44 is within one of the five predetermined temperature ranges IV shown in FIG. 3.
- the third temperature range III is an allowable temperature range, which is above a predetermined temperature T2 (for example, 30°C) and below a predetermined temperature T3 (for example, 87°C).
- the temperatures T2 and T3 and the allowable temperature range T2 to T3 are set, for example, to the hydraulic oil temperature and temperature range that allow each part of the electric working machine 1 to operate stably.
- the first temperature range I is set below a predetermined temperature T1 (for example, 2° C.).
- the second temperature range II is set to be above the temperature T1 and below the temperature T2.
- the fourth temperature range IV is set higher than the temperature T3 and below a predetermined temperature T4 (for example, 103° C.).
- Temperature T1 is an example of the "first temperature” of the present invention
- temperature T4 is an example of the "second temperature” of the present invention.
- the fourth temperature range IV is set higher than the temperature T4 (for example, 103° C.).
- the control device 7 controls the rotation speed R of the electric motor 9 within a predetermined range R1 to R5 according to the hydraulic oil temperature T, the unload lever 5c, and the state of the AI-SW 45 while the electric motor 9 is being driven. do.
- the first rotation speed R1 is a rotation speed (for example, 0 rpm) that corresponds to a stopped state of the electric motor 9.
- the second rotation speed R2 is the rotation speed (for example, 250 rpm) of the electric motor 9 at which the AI-SW 45 can generate hydraulic oil pressure that allows the AI-SW 45 to detect whether or not the working devices 20 and 10 are operated. More specifically, when at least one of the working devices 20 and 10 is activated, the AI-SW 45 is switched to the on state, and when the working devices 20 and 10 are not in operation, the AI-SW 45 is switched to the off state.
- the second rotation speed R2 is set to the rotation speed of the electric motor 9 to generate a hydraulic pressure higher than the minimum hydraulic oil pressure that can be changed.
- the third rotation speed R3 is the lower limit value (for example, 1,000 rpm) of the rotation speed of the electric motor 9 for performing work with the work devices 20 and 10. More specifically, the third rotation speed R3 is set to the rotation speed in a no-load state of the electric motor 9 that can immediately operate the working devices 20, 10 in response to the operation of the operating levers 5a, 5b. .
- the third rotation speed R3 is a rotation speed larger than the first rotation speed R1 and the second rotation speed R2, and is also an idling rotation speed.
- the second rotation speed R2 is higher than the first rotation speed R1 and smaller than the third rotation speed R3. Further, the second rotation speed R2 is also an idling rotation speed lower than the rotation speed of the electric motor 9 when working with the working devices 20, 10.
- the fifth rotation speed R5 is a predetermined maximum rotation speed (for example, 2,200 rpm) that can be set for the electric motor 9.
- the fourth rotation speed R4 is a rotation speed limited to be smaller than the fifth rotation speed R5, and is larger than the third rotation speed R3.
- the above-mentioned numerical values of temperatures T1 to T4 and rotational speeds R1 to R5 are merely examples, and are not limited to the above.
- the first rotation speed R1 corresponding to the stopped state of the electric motor 9 is not limited to 0 rpm, and may be an extremely small rotation speed, such as less than 1 rpm, for example.
- the control device 7 sets the rotation speed of the electric motor 9 to 0 rpm (first rotation speed)
- the control device 7 continues to supply power from the inverter 38 to the electric motor 9.
- the control device 7 may set the rotation speed of the electric motor 9 to 0 rpm by cutting off the power supply from the inverter 38 to the electric motor 9 and completely stopping the electric motor 9.
- FIGS. 4A to 4C are flowcharts showing the control operation of the rotation speed of the electric motor 9 in the electric working machine 1.
- a series of control operations shown in FIGS. 4A to 4C are executed by the CPU 7a (FIG. 1) of the control device 7 based on the software program stored in advance in the storage section 7b and the control map shown in FIG. 3.
- the rotation speed of the electric motor 9 will be referred to as "motor rotation speed.”
- the control device 7 When the starter SW 8 is turned on by the operator, the control device 7 starts the electric motor 9 using the inverter 38 . While the electric motor 9 is being driven, the control device 7 detects the hydraulic oil temperature T using the oil temperature detection device 44 (S1 in FIG. 4A).
- the control device 7 selects the mode using the mode selection SW5e (FIG. 1). Check the status. At this time, when the normal mode is selected by the mode selection SW 5e (S3 in FIG. 4A: NO), the control device 7 changes the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d (FIG. 1) to the third The rotation speed is set to be at least R3 and not more than the fifth rotation speed R5 (S5 in FIG. 4A, circle S in allowable temperature range III in FIG. 3). That is, the control device 7 sets the third rotation speed R3 as the lower limit value of the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d, and sets the fifth rotation speed R5 as the upper limit value.
- the control device 7 sets the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fourth rotation speed R4 or less (S4 in FIG. 4A, circle E in allowable temperature range III in FIG. 3). That is, the control device 7 sets the third rotation speed R3 as the lower limit value of the instruction range Rrange of the motor rotation speed R by the accelerator dial 5d, and sets the fourth rotation speed R4 as the upper limit value.
- the control device 7 when the AI-SW 45 is turned off for a predetermined period of time (for example, 4 seconds) or more because the working devices 20 and 10 have not operated for a predetermined period of time (for example, 4 seconds) or more (S6 in FIG. 4A: YES), the control device 7 , the motor rotation speed R is controlled to match the second rotation speed R2 (S7 in FIG. 4A, black circle mark of allowable temperature range III in FIG. 3). Processes S6 and S7 in FIG. 4A are so-called AI (auto idling) control.
- AI auto idling
- the control device 7 operates according to the operating position of the accelerator dial 5d.
- An instruction value of the motor rotation speed R is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Further, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S4 of FIG. 4A. Calculate the indicated value of motor rotation speed R.
- the control device 7 determines that there is an instruction to stop the electric motor 9 (S12 in FIG. 4A: YES), and the inverter 38 starts supplying power to the electric motor 9. By stopping the electric motor 9, the drive of the electric motor 9 is stopped (S13 in FIG. 4A). As a result, the electric working machine 1 comes to a stopped state.
- the control device 7 determines that there is no instruction to stop the electric motor 9 (S12 in FIG. 4A: NO), and executes the process from step S1 again. In this case, the electric motor 9 is being driven.
- the control The device 7 further determines whether the hydraulic oil temperature T is in either temperature range I or II.
- the control device 7 checks the mode selection state by the mode selection SW5e. At this time, when the normal mode is selected by the mode selection SW5e (S16 in FIG. 4B: NO), the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fifth rotation speed R5 or less (S18 in FIG. 4B, circle S in high temperature range II in FIG. 3).
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fourth rotation speed R4 or less (S17 in FIG. 4B, circle E in high temperature range II in FIG. 3).
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3 (S20 in FIG. 4B, (black circle mark in high temperature range II in Figure 3).
- the processes S19 and S20 in FIG. 4B are also AI controlled.
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3. (S22 in FIG. 4B). That is, when the hydraulic oil temperature T is in the temperature range II lower than the allowable temperature range III, even if the operator switches the unload lever 5c to the unload position and indicates the intention not to operate the working devices 20, 10. , the control device 7 warms up the electric motor 9 by continuing to rotate the electric motor 9 at a third rotation speed R3 or higher and circulating the hydraulic oil without executing AS (auto stop) control. Processes S19 to S22 in FIG. 4B are so-called warm-up control.
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d. An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Furthermore, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S17 of FIG. 4B. Calculate the indicated value of motor rotation speed R.
- the control device 7 selects between the normal mode and the ECO mode using the mode selection SW5e. Even if it is selected, the specified range Rrange of the motor rotation speed R by the accelerator dial 5d is set to the third rotation speed R3 or more and the fourth rotation speed R4 or less (S17 in FIG. 4B, extremely low temperature range in FIG. 3). S circle and E circle of I).
- the control device 7 controls the motor rotation speed R to match the third rotation speed R3 (S20 and S22 in FIG. 4B, black circles in the extremely low temperature range I in FIG. 3). That is, when the hydraulic oil temperature T is in the extremely low temperature range I, which is lower than the allowable temperature range III and the low temperature range II, the unload lever 5c is switched to the unload position, and the intention is not to operate the working devices 20 and 10. Even if this is indicated, the control device 7 does not perform AS (auto stop) control, but warms up the electric motor 9 by continuing to rotate the electric motor 9 at the third rotation speed R3 or higher and circulating the hydraulic oil. .
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d.
- An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d.
- the control The device 7 further determines whether the hydraulic oil temperature T is in either temperature range IV or V.
- the control device 7 confirms the mode selection state by the mode selection SW5e.
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or more. and the fifth rotation speed R5 or less (S26 in FIG. 4C, circle S in the high temperature range IV in FIG. 3).
- the control device 7 sets the specified range Rrange of the motor rotation speed R by the accelerator dial 5d to a third rotation speed R3 or higher. and the fourth rotation speed R4 or less (S25 in FIG. 4C, circle E in the high temperature range IV in FIG. 3).
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2 (S28 in FIG. 4C, (black circle in high temperature range IV in Figure 3). Processes S27 and S28 in FIG. 4C are also controlled by AI.
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2. (S30 in FIG. 4C, black circle in high temperature range IV in FIG. 3). That is, when the hydraulic oil temperature T is in the high temperature range IV which is higher than the allowable temperature range III, even if the unload lever 5c is switched to the unload position and the intention is not to operate the working devices 20, 10, The control device 7 does not perform AS (auto stop) control, continues to rotate the electric motor 9 at a second rotation speed R2 smaller than the third rotation speed R3, and circulates the hydraulic oil to cool the hydraulic oil. I do. Processes S27 to S30 in FIG. 4C are so-called cooling control.
- the control device 7 controls the motor rotation speed R according to the operating position of the accelerator dial 5d. An instruction value is calculated, and the motor rotation speed R is changed to match the instruction value (S11 in FIG. 4A).
- the control device 7 calculates an instruction value of the motor rotation speed R according to the operation position of the accelerator dial 5d. Further, when the ECO mode is selected by the mode selection SW 5e, the control device 7 controls the operation position of the accelerator dial 5d within the instruction range Rrange (R3 to R4) set in step S25 of FIG. 4C. Calculate the indicated value of motor rotation speed R.
- the control device 7 selects between the normal mode and the ECO mode using the mode selection SW5e. Even if it is selected, the upper and lower limits of the specified range Rrange of the motor rotation speed R by the accelerator dial 5d are set to the third rotation speed R3 (S31 in FIG. 4C, S of the extremely high temperature range V in FIG. 3). circle mark and E circle mark). That is, when the hydraulic oil temperature T is within the extremely high temperature range V, the designated range Rrange of the motor rotation speed R by the accelerator dial 5d is set to a constant third rotation speed R3. Therefore, even if the accelerator dial 5d is operated from the neutral position to any position, the indicated value of the motor rotation speed R becomes the third rotation speed R3, and the rotation speed R of the electric motor 9 is limited to the third rotation speed R3. be done.
- the control device 7 controls the motor rotation speed R to match the second rotation speed R2 (S30 in FIG. 4C, black circle mark in the extremely high temperature range V in FIG. 3). That is, when the hydraulic oil temperature T is in the extremely high temperature range V, even if the unload lever 5c is switched to the unload position and the intention is not to operate the working devices 20, 10, the control device 7 The hydraulic oil is cooled by continuing to rotate the electric motor 9 at the second rotation speed R2 and circulating the hydraulic oil without executing AS control.
- the control device 7 calculates the indicated value of the motor rotation speed R, and The motor rotation speed R is changed to match the value (S11 in FIG. 4A). At this time, since the hydraulic oil temperature T is in the extremely high temperature range V, the control device 7 selects the mode set in step S31 of FIG. A constant value R3 is determined as an instruction value of the motor rotation speed R.
- the control device 7 controls the fan of the oil cooler 37 when controlling the motor rotation speed R to match the second rotation speed R2.
- the hydraulic oil may be cooled by rotating the motor 37a at a predetermined rotation speed. That is, when the working devices 20, 10 are not operating, the oil cooler 37 is driven to cool the hydraulic oil while rotating the electric motor 9 at the second rotation speed R2.
- the control device 7 stops the oil cooler 37 and controls the power consumption when controlling the motor rotation speed R to match the third rotation speed R3. It may also be possible to reduce the temperature and promote the warm-up of the hydraulic oil. Furthermore, even when the hydraulic oil temperature T is within the allowable temperature range III, the control device 7 controls the oil temperature when controlling the motor rotation speed R to match the first rotation speed R1 or the second rotation speed R2. The cooler 37 may be stopped to reduce power consumption.
- the temperature range of the hydraulic oil temperature T was divided into five, first to fifth temperature ranges I to V, but the present invention is not limited to this.
- the temperature range of the hydraulic oil temperature T may be divided into two parts: within the permissible temperature range and outside the permissible temperature range.
- the temperature range of the hydraulic oil temperature T may be divided into three parts: within the permissible temperature range, a temperature range lower than the permissible temperature range, and a temperature range higher than the permissible temperature range.
- the temperature range of the hydraulic oil temperature T may be divided into four or six or more.
- the motor rotation speed R when performing AI control in each temperature range not only the second rotation speed R2 and the third rotation speed R3, but also three or more predetermined rotation speeds may be set. .
- the control device 7 may change the second to fourth rotation speeds R2 to R4 depending on the remaining capacity of the battery packs 31 and 32 provided in the battery unit 30. Specifically, the smaller the remaining capacity of the battery packs 31, 32, the smaller at least one of the second to fourth rotational speeds R2 to R4 may be changed.
- the work operation lever 5a and the traveling operation lever 5b are used as the work operation members
- the unload lever 5c is used as the switching member and the unload operation member
- the mode selection SW 5e is used as the selection member.
- the accelerator dial 5d is used as the instruction member
- various operating members such as levers, joysticks, slide switches, tumbler switches, push buttons, dials, or keys can be used as working operating members, switching members, unloading operating members, selection members, and instruction members.
- a mechanically operated valve or an electrically operated solenoid valve may be used as the unload valve 58.
- the AI-SW 45 consisting of a pressure switch was used as the work detection device, but the invention is not limited to this.
- a potentiometer, a sensor, a switch, or the like that detects whether or not the work operation lever 5a and the traveling operation lever 5b are operated may be used as the work detection device.
- the electric working machine 1 of this embodiment has the following configuration and produces effects.
- the electric working machine 1 of this embodiment includes a machine body 2, a battery unit 30 mounted on the machine body 2, an electric motor 9 driven by electric power from the battery unit 30, and a hydraulic pressure operated by the power from the electric motor 9.
- Equipment hydraulic motors ML, MR, MT, hydraulic cylinders C1 to C5, hydraulic pumps P1, P2, control valve CV
- work devices 20, 10 work device 20 operated by hydraulic pressure of hydraulic oil supplied from the hydraulic equipment.
- a traveling device 10 a control device 7 that controls the drive of the electric motor 9, and either a first position in which the operation of the working devices 20, 10 is permitted or a second position in which the operation of the working devices 20, 10 is not permitted.
- the control device 7 includes switching members 5c and 58 (unload lever 5c, unload valve 58) that can be switched to During operation, when the switching members 5c and 58 are switched to the second position and the temperature T of the hydraulic oil is within a predetermined allowable temperature range III (predetermined temperatures T2 to T3), which is neither a low temperature nor a high temperature, the electric The rotation speed R of the motor 9 is controlled to a predetermined first rotation speed R1 corresponding to the stopped state of the electric motor 9.
- a predetermined allowable temperature range III predetermined temperatures T2 to T3
- the temperature T of the hydraulic fluid is within the allowable range. If the temperature is within the temperature range III, the rotation speed R of the electric motor 9 decreases to the first rotation speed R1 corresponding to the stopped state. Therefore, it is possible to suppress the electric power of the battery unit 30 from being wasted by the electric motor 9, and it is possible to reduce wasted power consumption in the electric working machine 1 and improve work efficiency.
- the rotation speed R of the electric motor 9 is set to the first rotation speed R1. If the electric motor 9 is not controlled, the electric motor 9 will not come to a complete stop and will continue to rotate, so the hydraulic oil will be circulated by hydraulic equipment such as hydraulic pumps P1 and P2 to warm up or cool the hydraulic oil. This makes it possible to improve work efficiency.
- the rotation speed R of the electric motor 9 is changed. Control is performed to predetermined idling rotation speeds R2 and R3 that are larger than the first rotation speed R1 and less than or equal to the lower limit value of the rotation speed when working with the working devices 20 and 10.
- the rotation speed R of the electric motor 9 changes to the first rotation depending on whether the temperature T of the hydraulic oil is within the allowable temperature range III. Since the rotational speed is reduced to the number R1 or the idling rotational speed R2, R3, unnecessary power consumption can be reduced. Further, by reducing unnecessary power consumption, the operating time of the working devices 20 and 10 can be extended, and working efficiency can be improved.
- the control device 7 controls the The rotational speed R of the motor 9 is controlled to match the predetermined third rotational speed R3 at which the working devices 20 and 10 are in an idling state, and if the temperature T of the hydraulic oil is higher than the allowable temperature range III, the electric motor 9 is controlled to match a predetermined second rotation speed R2 which is larger than the first rotation speed R1 and smaller than the third rotation speed R3.
- the rotation speed R of the electric motor 9 decreases to the third rotation speed R3. Warm-up can be achieved by reducing wasteful power consumption, operating hydraulic equipment such as hydraulic pumps P1 and P2, and circulating hydraulic oil, and also shortening the time required for warm-up. Further, when the switching members 5c and 58 are switched to the second position and the temperature T of the hydraulic oil is higher than the allowable temperature range III, the rotation speed R of the electric motor 9 is set to a second rotation speed smaller than the third rotation speed R3. Since the temperature decreases to R2, wasteful power consumption can be reduced and cooling can be achieved by circulating the hydraulic oil.
- the electric working machine 1 includes a work detection device (AI-SW) 45 that is operated by hydraulic pressure of hydraulic oil to detect whether or not the work devices 20 and 10 are operated, and has a second rotation speed.
- R2 is set to the rotational speed R of the electric motor 9 at which the work detecting device 45 can generate hydraulic oil pressure that allows the work detection device 45 to detect whether or not the work device is in operation. Thereby, even if the rotational speed R of the electric motor 9 is lowered to the second rotational speed R2, the work detection device 45 can detect whether or not the working devices 20 and 10 are in operation.
- the control device 7 controls the operation of the hydraulic oil when the switching members 5c, 58 are in the first position while the electric motor 9 is being driven, and the working devices 20, 10 are not operated for a predetermined period of time or more. If the temperature T of the hydraulic fluid is lower than the allowable temperature range III, the rotation speed R of the electric motor 9 is controlled to match the third rotation speed R3, and if the temperature T of the hydraulic oil is higher than the allowable temperature range III, the electric motor 9 is controlled to match the third rotation speed R3. 9 is controlled to match the second rotation speed R2.
- the rotation speed R of the electric motor 9 is changed to the third rotation speed R3 or the third rotation speed R3 depending on the level of the temperature T of the hydraulic oil with respect to the allowable temperature range III. Warming up or cooling can be performed by lowering the rotation speed to 2 R2 to reduce wasteful power consumption and circulating the hydraulic oil.
- the electric working machine 1 includes an instruction member (accelerator dial) 5d that is operated to instruct the rotation speed R of the electric motor 9, and the control device 7 instructs the rotation speed R by operating the instruction member 5d.
- a possible rotational speed R of the electric motor 9 is set according to the temperature T of the hydraulic oil.
- the control device 7 calculates an instruction value for the rotation speed R of the electric motor 9 according to the operating state of the instruction member 5d, and controls the electric motor so that it matches the instruction value. The rotation speed R of the motor 9 is controlled.
- the rotation speed R of the electric motor 9 can be controlled according to the operation state of the instruction member 5d and the temperature T of the hydraulic oil, and the hydraulic oil can be circulated at an appropriate flow rate and pressure, and the working device 20 , 10 can be operated stably.
- the control device 7 also controls the maximum rotation speed, which is the upper limit of the settable rotation speed of the electric motor 9, from the third rotation speed R3 of the electric motor 9 at which the working devices 20, 10 are in an idling state.
- An instruction range Rrange of the rotation speed R of the electric motor 9 that can be specified by operating the instruction member 5d within a range up to the rotation speed (fifth rotation speed) R5 is set according to the temperature T of the hydraulic oil. Thereby, the rotation speed R of the electric motor 9 can be changed within an appropriate range depending on the operating state of the instruction member 5d and the temperature T of the hydraulic oil.
- the electric working machine 1 also includes a selection member (mode When the temperature T of the hydraulic oil is within the allowable temperature range III, the control device 7 controls the operation of the electric motor 9 by operating the instruction member 5d when the second mode is selected by the selection member 5e.
- the upper limit value of the instruction range Rrange of the rotation speed R is set smaller than the upper limit value of the instruction range Rrange when the first mode is selected by the selection member 5e.
- the control device 7 selects either the first mode or the second mode using the selection member 5e.
- the upper limit value of the instruction range Rrange of the rotation speed R of the electric motor 9 is set to a value smaller than the maximum rotation speed R5.
- the maximum rotation speed R5 is, for example, the rotation speed of the electric motor 9 that can be specified by the instruction member 5d when the temperature T of the hydraulic oil is within the allowable temperature range III and the first mode is selected by the selection member 5e.
- the control device 7 selects which of the first mode and the second mode is selected by the selection member 5e. Even if it is selected, the rotation speed R of the electric motor 9 that can be instructed by the instruction member 5d (the upper limit value and the lower limit value of the instruction range Rrange) is set to the third rotation speed R3.
- the temperature T of the hydraulic oil is in the extremely high temperature range V, it is possible to prevent the hydraulic oil in a high temperature state from flowing and causing wear or damage to the hydraulic equipment or the oil passage.
- the electric working machine 1 includes a cooling device (oil cooler) 37 that cools the hydraulic oil, and the control device 7 determines that the temperature T of the hydraulic oil detected by the oil temperature detection device 44 is an allowable temperature.
- the cooling device 37 is driven to cool the hydraulic oil, and when the temperature T of the hydraulic oil is below the allowable temperature range III, the cooling device 37 is stopped.
- the electric motor 9 is switched to a low speed.
- the electric working machine 1 includes an inverter 38 that adjusts the power supplied from the battery unit 30 to the electric motor 9, a rotation speed detection device 42 that detects the rotation speed R of the electric motor 9, and a working device. 20, 10, and the switching members 5c, 58 permit the operation of the working devices 20, 10.
- the control device 7 includes an unloading operation member 5c that can be operated to switch between a loading position and an unloading position that does not permit operation of the working devices 20 and 10.
- the rotation speed R of the electric motor 9 is controlled by adjusting the electric power supplied from the inverter 38 to the electric motor 9 based on the rotation speed R of the electric motor 9 .
- the rotation speed R of the electric motor 9 can be reliably set to a value indicated by the instruction member 5d or to a predetermined rotation speed R1 to R3.
- the AI-SW 45 can detect whether or not the work operation members 5a, 5b are operated, which corresponds to the operation or absence of the work devices 20, 10.
- the rotation speed R of the electric motor 9 is controlled to the first rotation speed R1, so that the electric power is supplied from the battery unit 30 to the electric motor 9.
- the rotational speed R of the electric motor 9 is subsequently increased, the power consumption can be reduced and the responsiveness of the electric motor 9 can be improved, compared to when the power supply to the electric motor 9 is cut off.
- an electric working machine 1 such as a backhoe
- the present invention is not limited to this, and for example, a wheel loader, a compact track loader, a skid steer loader, etc. It may also be applied to other construction machines such as tractors, combines, rice transplanters, lawn mowers, and other agricultural machines.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Operation Control Of Excavators (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP23779371.6A EP4501690A4 (en) | 2022-03-31 | 2023-03-09 | ELECTRIC CONSTRUCTION EQUIPMENT |
| JP2024511629A JP7711310B2 (ja) | 2022-03-31 | 2023-03-09 | 電動作業機 |
| US18/897,199 US20250019935A1 (en) | 2022-03-31 | 2024-09-26 | Electric working machine |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022060020 | 2022-03-31 | ||
| JP2022-060020 | 2022-03-31 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/897,199 Continuation US20250019935A1 (en) | 2022-03-31 | 2024-09-26 | Electric working machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023189344A1 true WO2023189344A1 (ja) | 2023-10-05 |
Family
ID=88200682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/008995 Ceased WO2023189344A1 (ja) | 2022-03-31 | 2023-03-09 | 電動作業機 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250019935A1 (https=) |
| EP (1) | EP4501690A4 (https=) |
| JP (1) | JP7711310B2 (https=) |
| WO (1) | WO2023189344A1 (https=) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06346488A (ja) * | 1993-06-07 | 1994-12-20 | Yutani Heavy Ind Ltd | デセル付レバーロック装置 |
| JPH09158255A (ja) * | 1995-12-01 | 1997-06-17 | Shin Caterpillar Mitsubishi Ltd | 車両における電気機器制御方法 |
| JP2000314333A (ja) * | 1999-04-30 | 2000-11-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2012041716A (ja) * | 2010-08-18 | 2012-03-01 | Hitachi Constr Mach Co Ltd | 電動式建設機械 |
| WO2015011832A1 (ja) * | 2013-07-26 | 2015-01-29 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP2016061016A (ja) * | 2014-09-12 | 2016-04-25 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP2016132967A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | 建設機械 |
| JP2020039239A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社日立建機ティエラ | 電動式建設機械 |
| JP2021080707A (ja) | 2019-11-18 | 2021-05-27 | 株式会社クボタ | 作業機 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9091041B2 (en) * | 2012-01-25 | 2015-07-28 | Hitachi Construction Machinery Co., Ltd. | Construction machine |
| JP6695792B2 (ja) * | 2016-12-28 | 2020-05-20 | 株式会社クボタ | 作業機の油圧システム |
| JP6552998B2 (ja) * | 2016-06-24 | 2019-07-31 | 株式会社クボタ | 作業機 |
| JP7321900B2 (ja) * | 2019-11-18 | 2023-08-07 | 株式会社クボタ | 旋回作業機 |
| JP7422610B2 (ja) * | 2020-06-02 | 2024-01-26 | ヤンマーホールディングス株式会社 | 電動式建設機械 |
-
2023
- 2023-03-09 JP JP2024511629A patent/JP7711310B2/ja active Active
- 2023-03-09 WO PCT/JP2023/008995 patent/WO2023189344A1/ja not_active Ceased
- 2023-03-09 EP EP23779371.6A patent/EP4501690A4/en active Pending
-
2024
- 2024-09-26 US US18/897,199 patent/US20250019935A1/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06346488A (ja) * | 1993-06-07 | 1994-12-20 | Yutani Heavy Ind Ltd | デセル付レバーロック装置 |
| JPH09158255A (ja) * | 1995-12-01 | 1997-06-17 | Shin Caterpillar Mitsubishi Ltd | 車両における電気機器制御方法 |
| JP2000314333A (ja) * | 1999-04-30 | 2000-11-14 | Toyota Motor Corp | 車両の制御装置 |
| JP2012041716A (ja) * | 2010-08-18 | 2012-03-01 | Hitachi Constr Mach Co Ltd | 電動式建設機械 |
| WO2015011832A1 (ja) * | 2013-07-26 | 2015-01-29 | 株式会社小松製作所 | 作業車両及び作業車両の制御方法 |
| JP2016061016A (ja) * | 2014-09-12 | 2016-04-25 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP2016132967A (ja) * | 2015-01-22 | 2016-07-25 | 日立建機株式会社 | 建設機械 |
| JP2020039239A (ja) * | 2018-09-05 | 2020-03-12 | 株式会社日立建機ティエラ | 電動式建設機械 |
| JP2021080707A (ja) | 2019-11-18 | 2021-05-27 | 株式会社クボタ | 作業機 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4501690A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023189344A1 (https=) | 2023-10-05 |
| US20250019935A1 (en) | 2025-01-16 |
| EP4501690A4 (en) | 2026-04-08 |
| JP7711310B2 (ja) | 2025-07-22 |
| EP4501690A1 (en) | 2025-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7676546B2 (ja) | 電動作業機および電動作業機の充電システム | |
| JP7581380B2 (ja) | 電動作業機 | |
| US7669413B2 (en) | Hybrid construction machine | |
| CN112004974A (zh) | 电动式作业机械 | |
| WO2021100663A1 (ja) | 旋回作業機 | |
| JP2021080703A (ja) | 電動作業機 | |
| JP2021080704A (ja) | 旋回作業機 | |
| JP7779982B2 (ja) | 電動式作業機械の制御方法 | |
| JP2020051065A (ja) | 電動式建設機械 | |
| JP6023391B2 (ja) | 建設機械の駆動装置 | |
| US20250003193A1 (en) | Working machine | |
| US12031289B2 (en) | Working machine | |
| JP7711310B2 (ja) | 電動作業機 | |
| JP2021080707A (ja) | 作業機 | |
| US20210310214A1 (en) | Working machine | |
| JP7711309B2 (ja) | 電動作業機 | |
| JP7379319B2 (ja) | 作業機 | |
| JP7830311B2 (ja) | 電動作業機、及び電動作業機の制御方法 | |
| US12500541B2 (en) | Electric working machine and method of controlling electric working machine | |
| JP2024094639A (ja) | 電動作業機、及び電動作業機の制御方法 | |
| JP2025143006A (ja) | 作業機械の制御方法、制御プログラム、制御システム、および作業機械 | |
| CN121110766A (zh) | 作业机械的控制方法、作业机械的控制程序、作业机械的控制系统以及作业机械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23779371 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2024511629 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023779371 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2023779371 Country of ref document: EP Effective date: 20241031 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |