WO2023162463A1 - 発光デバイスおよびVoS(VCSEL on Silicon)デバイス - Google Patents
発光デバイスおよびVoS(VCSEL on Silicon)デバイス Download PDFInfo
- Publication number
- WO2023162463A1 WO2023162463A1 PCT/JP2022/048339 JP2022048339W WO2023162463A1 WO 2023162463 A1 WO2023162463 A1 WO 2023162463A1 JP 2022048339 W JP2022048339 W JP 2022048339W WO 2023162463 A1 WO2023162463 A1 WO 2023162463A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- layer
- solder
- vehicle
- emitting device
- light
- Prior art date
Links
- 229910052710 silicon Inorganic materials 0.000 title claims description 19
- 239000010703 silicon Substances 0.000 title claims description 19
- 229910000679 solder Inorganic materials 0.000 claims abstract description 98
- 238000009736 wetting Methods 0.000 claims abstract description 42
- 239000010936 titanium Substances 0.000 claims abstract description 40
- 230000004888 barrier function Effects 0.000 claims abstract description 34
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 claims abstract description 20
- 229910052719 titanium Inorganic materials 0.000 claims abstract description 18
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 claims abstract description 16
- MZLGASXMSKOWSE-UHFFFAOYSA-N tantalum nitride Chemical compound [Ta]#N MZLGASXMSKOWSE-UHFFFAOYSA-N 0.000 claims abstract description 12
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 claims description 45
- 239000000758 substrate Substances 0.000 claims description 40
- 239000010931 gold Substances 0.000 claims description 22
- 229910052697 platinum Inorganic materials 0.000 claims description 19
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 claims description 18
- 229910052737 gold Inorganic materials 0.000 claims description 14
- 229910052715 tantalum Inorganic materials 0.000 claims description 14
- 229910052721 tungsten Inorganic materials 0.000 claims description 13
- 239000010949 copper Substances 0.000 claims description 12
- 229910052802 copper Inorganic materials 0.000 claims description 11
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 claims description 11
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 claims description 10
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 claims description 9
- 229910017052 cobalt Inorganic materials 0.000 claims description 9
- 239000010941 cobalt Substances 0.000 claims description 9
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 claims description 9
- GUVRBAGPIYLISA-UHFFFAOYSA-N tantalum atom Chemical compound [Ta] GUVRBAGPIYLISA-UHFFFAOYSA-N 0.000 claims description 9
- 239000010937 tungsten Substances 0.000 claims description 9
- 239000010410 layer Substances 0.000 description 309
- 238000003384 imaging method Methods 0.000 description 36
- 238000005516 engineering process Methods 0.000 description 33
- 229910052751 metal Inorganic materials 0.000 description 33
- 239000002184 metal Substances 0.000 description 33
- 238000001514 detection method Methods 0.000 description 27
- 238000004519 manufacturing process Methods 0.000 description 12
- 238000002347 injection Methods 0.000 description 11
- 239000007924 injection Substances 0.000 description 11
- 125000006850 spacer group Chemical group 0.000 description 11
- 238000010586 diagram Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 239000004065 semiconductor Substances 0.000 description 7
- 238000005530 etching Methods 0.000 description 6
- 230000003287 optical effect Effects 0.000 description 5
- 238000004544 sputter deposition Methods 0.000 description 5
- 229910045601 alloy Inorganic materials 0.000 description 4
- 239000000956 alloy Substances 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 238000007740 vapor deposition Methods 0.000 description 4
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 3
- 239000007789 gas Substances 0.000 description 3
- 239000012535 impurity Substances 0.000 description 3
- 238000007747 plating Methods 0.000 description 3
- 239000002994 raw material Substances 0.000 description 3
- 238000005476 soldering Methods 0.000 description 3
- 239000012790 adhesive layer Substances 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 229910052759 nickel Inorganic materials 0.000 description 2
- 230000003647 oxidation Effects 0.000 description 2
- 238000007254 oxidation reaction Methods 0.000 description 2
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 2
- 238000001020 plasma etching Methods 0.000 description 2
- HJUGFYREWKUQJT-UHFFFAOYSA-N tetrabromomethane Chemical compound BrC(Br)(Br)Br HJUGFYREWKUQJT-UHFFFAOYSA-N 0.000 description 2
- JLTRXTDYQLMHGR-UHFFFAOYSA-N trimethylaluminium Chemical compound C[Al](C)C JLTRXTDYQLMHGR-UHFFFAOYSA-N 0.000 description 2
- XCZXGTMEAKBVPV-UHFFFAOYSA-N trimethylgallium Chemical compound C[Ga](C)C XCZXGTMEAKBVPV-UHFFFAOYSA-N 0.000 description 2
- IBEFSUTVZWZJEL-UHFFFAOYSA-N trimethylindium Chemical compound C[In](C)C IBEFSUTVZWZJEL-UHFFFAOYSA-N 0.000 description 2
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 240000004050 Pentaglottis sempervirens Species 0.000 description 1
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- 229920000535 Tan II Polymers 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- RBFQJDQYXXHULB-UHFFFAOYSA-N arsane Chemical compound [AsH3] RBFQJDQYXXHULB-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000002109 crystal growth method Methods 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- PZPGRFITIJYNEJ-UHFFFAOYSA-N disilane Chemical compound [SiH3][SiH3] PZPGRFITIJYNEJ-UHFFFAOYSA-N 0.000 description 1
- 238000004299 exfoliation Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 125000002496 methyl group Chemical group [H]C([H])([H])* 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 125000002524 organometallic group Chemical group 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000009279 wet oxidation reaction Methods 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/02—Structural details or components not essential to laser action
- H01S5/022—Mountings; Housings
- H01S5/0235—Method for mounting laser chips
- H01S5/02355—Fixing laser chips on mounts
- H01S5/0237—Fixing laser chips on mounts by soldering
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/04—Processes or apparatus for excitation, e.g. pumping, e.g. by electron beams
- H01S5/042—Electrical excitation ; Circuits therefor
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S5/00—Semiconductor lasers
- H01S5/10—Construction or shape of the optical resonator, e.g. extended or external cavity, coupled cavities, bent-guide, varying width, thickness or composition of the active region
- H01S5/18—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities
- H01S5/183—Surface-emitting [SE] lasers, e.g. having both horizontal and vertical cavities having only vertical cavities, e.g. vertical cavity surface-emitting lasers [VCSEL]
Definitions
- This technology relates to light emitting devices. More particularly, it relates to light emitting devices and VoS devices mounted on silicon substrates.
- VCSELs Very Cavity Surface Emitting Lasers
- a laser device has been proposed in which a plurality of light emitting devices are mounted on a laser chip in a two-dimensional array and the laser chip is connected to a laser driver (see, for example, Patent Document 1).
- the light emitting device is connected to the laser driver via bumps.
- the metal layer of the light-emitting device which is connected to the bumps by soldering, is formed by laminating Ti (titanium), Pt (platinum), and Au (gold) in this order from the laser chip side.
- the resistance caused by wiring is reduced compared to the case of using wire bonding.
- the Pt layer diffuses quickly into the solder, and exfoliation occurs at the interface between the Ti layer and the Pt layer due to being left at high temperature or reflowing, and the reliability of the connection with the laser driver deteriorates. may decrease.
- This technology was created in view of this situation, and aims to improve connection reliability in light-emitting devices that are connected to laser drivers.
- the present technology has been made to solve the above-described problems, and the first aspect thereof is a solder wetting layer connected by solder, two layers consisting of a titanium layer and a titanium nitride layer, and a tantalum nitride layer. and a solder barrier layer formed between the solder wetting layer and the adhesion layer. This brings about the effect of improving the reliability.
- the solder barrier layer may contain one or more of cobalt, platinum, tantalum and tungsten. This has the effect of slowing the diffusion of solder.
- the solder wetting layer may contain one or more of gold, platinum and copper. This brings about the effect that gold, platinum and copper are connected by solder.
- a second aspect of the present technology includes a solder wetting layer connected to a silicon substrate by soldering, an adhesion layer made of a titanium layer, and one or more of cobalt, tantalum, and tungsten, and the solder wetting layer and and a solder barrier layer formed between the adhesive layer. This brings about the effect of improving the reliability.
- the solder wetting layer may contain one or more of gold, platinum and copper. This brings about the effect that gold, platinum and copper are connected by solder.
- a third aspect of the present technology includes a solder wetting layer connected by solder, an adhesion layer including one of two layers including a titanium layer and a titanium nitride layer, and a tantalum nitride layer, the solder wetting layer and the A VoS (VCSEL on Silicon) device comprising a light emitting device comprising a solder barrier layer formed between an adhesion layer and a silicon substrate on which the light emitting device is arranged.
- VCSEL on Silicon VCSEL on Silicon
- a fourth aspect of the present technology includes a solder wetting layer connected by solder, an adhesion layer made of a titanium layer, and one or more of cobalt, platinum, tantalum, and tungsten, and the solder wetting layer and the A VoS (VCSEL on Silicon) device comprising a light emitting device comprising a solder barrier layer formed between an adhesion layer and a silicon substrate on which the light emitting device is arranged.
- VCSEL on Silicon VCSEL on Silicon
- FIG. 2 is a diagram showing a cross-sectional configuration example taken along line AA of FIG. 1 according to the first embodiment of the present technology; It is a figure showing the cross-sectional structural example of the emitter of FIG. 2, and its circumference
- 1 is a diagram showing a planar configuration example when the laser driver IC of FIG. 1 is mounted on a printed wiring board in the first embodiment of the present technology; FIG.
- FIG. 6 is a diagram showing a cross-sectional configuration example taken along line AA of FIG. 5 in the first embodiment of the present technology;
- FIG. It is a sectional view showing an example of a manufacturing method of a laser chip of Drawing 3 in a 1st embodiment of this art.
- 8 is a cross-sectional view showing an example of a manufacturing process following FIG. 7 in the first embodiment of the present technology;
- FIG. 9 is a cross-sectional view showing an example of a manufacturing process following FIG. 8 in the first embodiment of the present technology;
- FIG. 10 is a cross-sectional view showing an example of a manufacturing process following FIG. 9 in the first embodiment of the present technology;
- 11 is a cross-sectional view showing an example of a manufacturing process following FIG.
- FIG. 10 in the first embodiment of the present technology
- FIG. FIG. 12 is a cross-sectional view showing an example of a manufacturing process following FIG. 11 in the first embodiment of the present technology
- 13A and 13B are cross-sectional views illustrating an example of a manufacturing process following FIG. 12 in the first embodiment of the present technology
- FIG. 14A and 14B are cross-sectional views illustrating an example of a manufacturing process following FIG. 13 in the first embodiment of the present technology
- It is a sectional view showing an example of 1 composition of a metal layer in a 2nd embodiment of this art. It is a figure showing the application example to the distance measuring device of the surface-emitting laser apparatus which concerns on the said embodiment.
- 1 is a block diagram showing a schematic configuration example of a vehicle control system
- FIG. FIG. 4 is an explanatory diagram showing an example of an installation position of an imaging unit
- First Embodiment Example of Forming Adhesion Layer of Ti/TiN or TaN
- Second Embodiment Example of forming a solder barrier layer containing one or more of Co, Ta and W
- Application example 4 Example of application to mobile objects
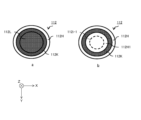
- FIG. 1 shows a top configuration example of a surface-emitting laser device 100 .
- FIG. 2 shows a cross-sectional configuration example of the surface-emitting laser device 100 of FIG. 1 taken along the line AA.
- the surface-emitting laser device 100 is a back-emitting laser that can be suitably applied to applications that require thinness and low power consumption, applications that require thinness and a large area, and the like.
- a surface emitting laser device 100 includes a laser chip 110 and a laser driver IC (Integrated Circuit) 120 .
- the laser chip 110 is arranged on the laser driver IC 120 .
- the laser chip 110 is electrically connected to the laser driver IC 120 via a plurality of solder bumps 114, for example.
- a predetermined axis parallel to the chip plane of the laser chip 110 is called "X-axis”
- an axis perpendicular to the chip plane is called "Z-axis”.
- FIG. 1 is a plan view seen from the Z-axis direction
- FIG. 2 is a cross-sectional view seen from the Y-axis direction.
- the laser chip 110 includes, for example, a substrate 113, an emitter array 111 formed on the surface of the substrate 113 facing the laser driver IC 120, and a plurality of solder bumps 114 formed on the surface of the substrate 113 facing the laser driver IC 120. , and an AR (Anti-reflection) layer 113A formed on the surface (light emitting surface) of the substrate 113 opposite to the laser driver IC 120 .
- the emitter array 111 is arranged on the opposite side of the substrate 113 from the light exit surface.
- the AR layer 113A is composed of, for example, a laminated body in which SiO 2 and SiN are laminated.
- the emitter array 111 is composed of a plurality of emitters 112 arranged on the same substrate 113, as shown in FIGS. 1 and 2, for example.
- the plurality of emitters 112 are, for example, arranged on the substrate 113 at equal intervals in the row direction and also at equal intervals in the column direction. Note that the plurality of emitters 112 may be randomly arranged on the same substrate 113 .
- Each emitter 112 is composed of a surface-emitting semiconductor laser, that is, a VCSEL, which emits laser light in the stacking direction. In this embodiment, each emitter 112 emits laser light to the side opposite to laser driver IC 120 through substrate 113 and AR layer 113A.
- the substrate 113 is composed of, for example, a semi-insulating semiconductor substrate (eg, Si—GaAs substrate) that transmits light emitted from the emitter 112 .
- the emitter 112 is an example of the light emitting device described in the claims
- the substrate 113 is an example of the silicon substrate described in the claims.
- the surface emitting laser device 100 is an example of the VoS device described in the claims.
- Each emitter 112 includes, for example, as shown in FIG. are stacked in order from the substrate 113 side to form a columnar vertical resonator structure (mesa portion 112x).
- the diameter (mesa diameter) of each mesa portion 112x is slightly smaller than the beam pitch of the laser light emitted from each mesa portion 112x. For example, when the beam pitch is about 18 ⁇ m, the diameter (mesa diameter) of each mesa portion 112x is about 14 ⁇ m.
- the DBR layers 112C and 112G sandwich the active layer 112E.
- Each emitter 112 has a contact layer 112A that contacts an etch stop layer 112B.
- the contact layer 112A is a layer for bringing each mesa portion 112x (specifically, a DBR layer 112C described later) and an electrode layer 117 described later into ohmic contact with each other.
- the contact layer 112 ⁇ /b>A is provided between each mesa portion 112 x and the substrate 113 and is in contact with each mesa portion 112 x and the substrate 113 .
- the substrate 113 is provided in contact with the contact layer 112A on the side opposite to the active layer 112E.
- the contact layer 112A is shared by each emitter 112. That is, the plurality of mesa portions 112x are arranged on the same contact layer 112A, and in the laser chip 110, each mesa portion 112x protrudes toward the laser driver IC 120 side. In each mesa portion 112x, the contact layer 112H forms an end face on the laser driver IC 120 side.
- the end surface of the mesa portion 112x on the side of the laser driver IC 120 may be referred to as the upper surface of the mesa portion 112x for convenience.
- a current confinement layer 112i is provided within the DBR layer 112G. 3 shows a cross-sectional configuration example of a portion surrounded by a broken line in the laser chip 110 shown in FIG.
- each mesa portion 112x is formed by using the substrate 113 as a crystal growth substrate, for example.
- Each mesa portion 112x and the contact layer 112A are made of, for example, a GaAs-based semiconductor.
- the contact layer 112A is made of, for example, p-type Al x1 Ga 1-x1 As (0 ⁇ x1 ⁇ 1).
- the etching stop layer 112B is made of, for example, p-type Inx2Ga1 -x2P (0 ⁇ x2 ⁇ 1).
- the DBR layer 112C is configured by alternately stacking low refractive index layers (not shown) and high refractive index layers (not shown).
- the low refractive index layer is made of, for example, p-type Al x3 Ga 1-x3 As (0 ⁇ x3 ⁇ 1) with an optical thickness of ⁇ 1/4 ( ⁇ 1 is the oscillation wavelength), and the high refractive index layer is made of p-type Al x4 Ga 1-x4 As (0 ⁇ x4 ⁇ x3) with an optical thickness of ⁇ 1/4, for example.
- the spacer layer 112D is made of, for example, p-type Alx5Ga1 -x5As (0 ⁇ x5 ⁇ 1).
- the contact layer 112A, the etching stop layer 112B, the DBR layer 112C and the spacer layer 112D contain p-type impurities such as carbon (C). That is, the contact layer 112A, the etching stop layer 112B, the DBR layer 112C and the spacer layer 112D are made of p-type semiconductor.
- the active layer 112E includes, for example, a well layer (not shown) made of undoped Inx6Ga1 -x6As (0 ⁇ x6 ⁇ 1) and an undoped Inx7Ga1 -x7As (0 ⁇ x7 ⁇ x6). It has a multiple quantum well structure in which barrier layers (not shown) are alternately laminated. A region of the active layer 112E facing a current injection region 112i-1 (to be described later) serves as a light emitting region.
- the spacer layer 112F is made of, for example, n-type Al x8 Ga 1-x8 As (0 ⁇ x8 ⁇ 1).
- the DBR layer 112G is formed by alternately stacking low refractive index layers (not shown) and high refractive index layers (not shown).
- the low refractive index layer is made of, for example, n-type Alx9Ga1 -x9As (0 ⁇ x9 ⁇ 1) with an optical thickness of ⁇ 1/4
- the high refractive index layer is made of, for example, an optical thickness of It consists of n-type Al x10 Ga 1-x10 As (0 ⁇ x10 ⁇ x9) of ⁇ 1/4.
- the contact layer 112H is a layer for bringing the DBR layer 112G and the ring electrode layer 112K into ohmic contact with each other.
- the contact layer 112H is made of, for example, n-type Al x11 Ga 1-x11 As (0 ⁇ x11 ⁇ 1).
- the spacer layer 112F, the DBR layer 112G and the contact layer 112H contain n-type impurities such as silicon (Si). That is, the spacer layer 112F, the DBR layer 112G, and the contact layer 112H are composed of an n-type semiconductor.
- the number of pairs of low refractive index layers and high refractive index layers in the DBR layer 112G is, for example, smaller than the number of pairs of low refractive index layers and high refractive index layers in the DBR layer 112C.
- the number of pairs of the DBR layers 112G is half or less of the number of pairs required as the DBR layers when the insulating film 115a and the metal layer 112L, which will be described later, are not provided. This is because the insulating film 115a and the metal layer 112L assist the light reflecting function of the DBR layer 112G. This is because the number of pairs of index layers and high refractive index layers can be reduced.
- the current confinement layer 112i has a current injection region 112i-1 and a current confinement region 112i-2.
- the current confinement region 112i-2 is formed in the peripheral region of the current injection region 112i-1.
- the current injection region 112i-1 is made of, for example, p-type Al x12 Ga 1-x12 As (0 ⁇ x12 ⁇ 1).
- the current confinement region 112i-2 is composed of, for example, Al 2 O 3 (aluminum oxide). can get. Therefore, the current constriction layer 112i has a function of constricting current.
- Each emitter 112 further has a ring electrode layer 112K in contact with the contact layer 112H, for example, as shown in FIG. 3a and FIG. 4b.
- the ring electrode layer 112K is arranged on the side opposite to the light emitting surface of the substrate 113, and is formed in contact with the upper surface of the mesa portion 112x.
- the ring electrode layer 112K is formed at a position not facing the light emitting region (or current injection region 112i-1) of the active layer 112E, and faces the light emitting region (or current injection region 112i-1) of the active layer 112E. It is a ring-shaped electrode with an opening at the position.
- the ring electrode layer 112K is in contact with a portion of the contact layer 112H that does not face the light emitting region (or the current injection region 112i-1) of the active layer 112E. Therefore, the ring electrode layer 112K is electrically connected to the DBR layer 112G through the contact layer 112H.
- the ring electrode layer 112K contains an alloy.
- the ring electrode layer 112K includes, for example, an alloy in contact with the contact layer 112H, and is a laminate formed by stacking AuGe, Ni, and Au in order from the contact layer 112H side, for example.
- Each emitter 112 further has a metal layer 112L in contact with the ring electrode layer 112K, for example, as shown in FIG. 3a and FIG. 4a.
- the metal layer 112L is formed to block the opening of the ring electrode layer 112K, and the outer edge portion of the metal layer 112L (the portion not facing the current injection region 112i-1) is in contact with the ring electrode layer 112K. Therefore, the metal layer 112L is electrically connected to the DBR layer 112G through the ring electrode layer 112K and the contact layer 112H.
- the metal layer 112L is also in contact with the solder bumps 114 and is electrically connected to the laser driver IC 120 via the solder bumps 114 .
- Reference numeral 114-1 in the figure denotes a barrier metal 114-1 on the side of the laser driver IC 120, which is a laminate of Ni and Cu, for example.
- 112 L of metal layers are electrically connected with NMOS in laser driver IC120, for example.
- the metal layer 112L is made of a non-alloy, and is a laminate formed by sequentially stacking various metal layers from the ring electrode layer 112K side.
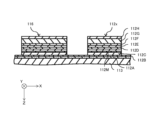
- FIG. 3 is a diagram showing a configuration example of the metal layer 112L.
- This metal layer 112L consists of a reflective metal 112L-2 and a connection electrode 112L-1.
- a reflective metal 112 L- 2 is formed on the substrate 113 side and functions as an anode electrode of the emitter 112 .
- As the reflective metal 112L-2 for example, a laminated film in which Ti (titanium) and Au (gold) are laminated is used.
- connection electrode 112L-1 is formed between the reflective metal 112L-2 and the solder bump 114.
- the connection electrode 112L-1 is composed of a solder wetting layer 410, a solder barrier layer 420 and an adhesion layer 430 laminated in the Z-axis direction.
- the solder wetting layer 410 is a layer connected to the solder bump 114 and has a function of suppressing oxidation of the upper surface of the emitter 112 .
- the solder wetting layer 410 contains, for example, one or more of Au (gold), Pt (platinum) and Cu (copper). In b in the figure, only Au is used. Also, the film thickness of the solder wetting layer 410 is, for example, 5 to 100 nanometers (nm). However, if the solder wetting layer 410 is too thick, the metal (Au, etc.) of the solder wetting layer 410 will diffuse into the solder bumps 114 and cause voids. It is necessary to control in accordance with the amount of solder.
- the solder barrier layer 420 is formed between the solder wetting layer 410 and the adhesion layer 430 .
- This solder barrier layer 420 contains, for example, one or more of Co (cobalt), Pt, Ta (tantalum) and W (tungsten).
- Co cobalt
- Pt palladium
- Ta tantalum
- W tungsten
- the film thickness of the solder barrier layer 420 is, for example, 100 to 500 nanometers (nm).
- the adhesion layer 430 is formed between the contact layer 112H and the solder barrier layer 420.
- the adhesion layer 430 is a layer consisting of one of two layers consisting of a Ti (titanium) layer and a TiN (titanium nitride) layer and a TaN (tantalum nitride) layer.
- a Ti layer 432 and a TiN layer 431 are used.
- a Ti layer 432 is formed on the substrate 113 side.
- the thickness of the Ti layer 432 is, for example, 10 to 100 nanometers (nm), and the thickness of the TiN layer 431 is 10 to 100 nanometers (nm).
- the reflective metal 112L-2 and the connection electrode 112L-1 may be patterned together by lift-off, or may be patterned separately to change the size of the reflective metal 112L-2 and the connection electrode 112L-1. good.
- the interface between Ti and Pt is reduced compared to the case where only Ti is used as the adhesion layer even if the solder barrier layer 420 is Pt. is eliminated, it is possible to prevent peeling.
- the metal layer 112L is not in direct contact with the upper surface (contact layer 112H) of the mesa portion 112x.
- the central portion of the metal layer 112L (the portion facing the current injection region 112i-1) is stacked on the upper surface (contact layer 112H) of the mesa portion 112x via an insulating film 115a, which will be described later.
- the central portion of the metal layer 112L and the insulating film 115a are provided at a position facing the light emitting region (or the current injection region 112i-1) of the active layer 112E, and the reflection on the DBR layer 112G side when viewed from the active layer 112E. Corresponds to the end of the mirror.
- Each emitter 112 further has an electrode layer 117 in contact with the contact layer 112A, for example, as shown in FIG. 3a.
- the electrode layer 117 is arranged on the opposite side of the light emitting surface of the substrate 113, and is in contact with the contact layer 112A at a position not facing the mesa portion 112x.
- the electrode layer 117 is in contact with, for example, a portion of the contact layer 112A corresponding to the base of the mesa portion 112x. Therefore, the electrode layer 117 is electrically connected to the DBR layer 112C through the contact layer 112A.
- the electrode layer 117 is made of a non-alloy, and is a laminate formed by laminating Ti, Pt, and Au in order from the contact layer 112A side, for example.
- FIG. 5 shows a planar configuration example when the laser driver IC 120 is mounted on the printed wiring board 140 .
- the printed wiring board 140 is provided with a system controller 130 in addition to the laser driver IC 120, for example.
- FIG. 6 shows a cross-sectional configuration example taken along line AA of FIG.
- a bonding layer 143 is provided between the laser driver IC 120 and the printed wiring board 140 .
- the bonding layer 143 fixes the laser driver IC 120 and the printed wiring board 140 to each other.
- the bonding layer 143 is made of, for example, an insulating resin material.
- the laser driver IC 120 and the printed wiring board 140 are electrically connected by bonding wires 144 .
- One end of the bonding wire 144 is fixed to the connection pad 122 c of the laser driver IC 120 and the other end of the bonding wire 144 is connected to the connection pad 141 of the printed wiring board 140 .
- a compound semiconductor is collectively formed on a substrate 113 made of GaAs, for example, by an epitaxial crystal growth method such as MOCVD (Metal Organic Chemical Vapor Deposition).
- MOCVD Metal Organic Chemical Vapor Deposition
- methyl-based organometallic gases such as trimethylaluminum (TMAl), trimethylgallium (TMGa), and trimethylindium (TMIn), and arsine (AsH 3 ) gas are used.
- Disilane (Si 2 H 6 ) for example, is used as the raw material, and carbon tetrabromide (CBr 4 ), for example, is used as the acceptor impurity raw material.
- a contact layer 112A, an etching stop layer 112B, a DBR layer 112C including a layer 112M to be oxidized, a spacer layer 112D, an active layer 112E, and a spacer layer 112F are formed on the surface of the substrate 113 by epitaxial crystal growth such as MOCVD.
- a DBR layer 112G and a contact layer 112H are formed in this order (FIG. 7).
- the contact layer 112H, the DBR layer 112G, the spacer layer 112F, the active layer 112E, the spacer layer 112D and the DBR layer are formed.
- 112C is selectively etched.
- RIE Reactive Ion Etching
- Cl-based gas for example.
- a columnar mesa portion 112x and a pedestal portion 116 having a height reaching the surface of the etching stop layer 112B are formed.
- the layer 112M to be oxidized is exposed on the side surface of the mesa portion 112x. After that, the resist layer is removed.
- oxidation treatment is performed at a high temperature in a water vapor atmosphere to selectively oxidize Al contained in the layer 112M to be oxidized from the side surface of the mesa portion 112x.
- Al contained in the layer to be oxidized 112M is selectively oxidized from the side surface of the mesa portion 112x.
- the outer edge region of the layer 112M to be oxidized becomes an insulating layer (aluminum oxide) in the mesa portion 112x, forming the current confinement layer 112i (FIG. 9).
- a ring electrode layer 112K is formed on the upper surface of the mesa portion 112x (a in FIG. 10).
- b in FIG. 10 is an enlarged view of the formation location of the ring electrode layer 112K of a in the same figure.
- the shape of the ring electrode layer 112K is different at a in FIG. 11 compared to b in FIG.
- a lift-off resist 500 is applied around the ring electrode layer 112K.
- a reflective metal 112L-2 such as Ti/Au is formed by sputtering or vapor deposition.
- a connection electrode 112L-1 of TiN/Ti/Co/Au or the like is formed by sputtering or vapor deposition.
- the lift-off resist 500 is removed (that is, lifted off) as illustrated by d in FIG.
- an insulating film 115a having openings in the portion facing the ring electrode layer 112K and the skirt portion of the mesa portion 112x is formed.
- a plurality of emitters 112 are formed on the contact layer 112A.
- an electrode layer 118 is formed on the pedestal 116 by, for example, vapor deposition or sputtering (FIG. 12).
- a plating method is used to form a coupling layer 119 that connects the electrode layer 117 of each emitter 112 and the electrode layer 118 on the pedestal 116 (FIG. 13).
- a base layer that serves as a seed for plating is formed in the insulating film 115a where the coupling layer 119 is to be formed, for example, by vapor deposition or sputtering.
- the thickness of the coupling layer 119 is a thickness (for example, about 2 ⁇ m) that can sufficiently prevent a voltage drop.
- the insulating film 115b that covers the side surface of each emitter 112 and the surface of the coupling layer 119 is formed by, for example, CVD (FIG. 14).
- the AR layer 113A is formed on the back surface of the substrate 113 using, for example, CVD or sputtering.
- the substrate 113 is diced.
- the laser chip 110 is manufactured.
- the ring electrode layer 112K, the reflective metal 112L-2, and the electrode layers 117 and 118 are formed after the formation of the mesa portion 112x, but the order is not limited to this.
- the mesa portion 112x can also be formed after the ring electrode layer 112K, the reflective metal 112L-2, and the electrode layers 117 and 118 are formed.
- connection electrode 112L-1 including the adhesion layer 430 of Ti/TiN or TaN, the solder barrier layer 420, and the solder wetting layer 410 is formed, Even if the solder barrier layer 420 is Pt, there is no Pt/Ti interface. As a result, peeling can be prevented and the reliability of connection can be improved as compared with the case where the adhesion layer 430 is made of only Ti.
- Second Embodiment> Although the adhesion layer 430 of Ti/TiN or TaN is formed in the first embodiment described above, the structure is not limited to this, and the adhesion layer 430 can be made of only Ti.
- the surface-emitting laser device 100 of the second embodiment differs from the first embodiment in that the adhesive layer 430 is made of only Ti.
- FIG. 15 is a cross-sectional view showing one configuration example of the metal layer 112L according to the second embodiment of the present technology.
- the adhesion layer 430 consists only of Ti.
- the solder barrier layer 420 does not contain Pt, but contains one or more of Co, Ta and W, for example. Co is used in the figure.
- the solder wetting layer 410 of the second embodiment contains one or more of Au, Pt and Cu, as in the first embodiment. In the figure, only Au is used.
- the solder barrier layer 420 containing one or more of Co, Ta and W is formed between the Ti adhesion layer 430 and the solder wetting layer 410. , the Pt/Ti interface disappears. As a result, peeling can be prevented and the reliability of connection can be improved as compared with the case where the solder barrier layer 420 contains Pt.
- FIG. 16 shows an example of a schematic configuration of a distance measuring device 200 including the surface emitting laser device 100.
- the distance measuring device 200 measures the distance to the subject 300 by a TOF (Time Of Flight) method.
- a distance measuring device 200 includes a surface emitting laser device 100 as a light source.
- the distance measuring device 200 includes, for example, a surface emitting laser device 100, a light receiving device 220, lenses 210 and 230, a signal processing section 240, a control section 250, a display section 260 and a storage section 270.
- the light receiving device 220 detects light reflected by the subject 300 .
- the lens 210 is a lens for collimating the light emitted from the surface emitting laser device 100, and is a collimating lens.
- the lens 230 is a lens for condensing the light reflected by the subject 300 and guiding it to the light receiving device 220, and is a condensing lens.
- the signal processing section 240 is a circuit for generating a signal corresponding to the difference between the signal input from the light receiving device 220 and the reference signal input from the control section 250 .
- the control unit 250 includes, for example, a Time to Digital Converter (TDC).
- the reference signal may be a signal input from the control section 250 or an output signal of a detection section that directly detects the output of the surface emitting laser device 100 .
- the control unit 250 is a processor that controls the surface emitting laser device 100, the light receiving device 220, the signal processing unit 240, the display unit 260 and the storage unit 270, for example.
- the control section 250 is a circuit that measures the distance to the subject 300 based on the signal generated by the signal processing section 240 .
- the control unit 250 generates a video signal for displaying information about the distance to the subject 300 and outputs it to the display unit 260 .
- the display unit 260 displays information about the distance to the subject 300 based on the video signal input from the control unit 250 .
- the control unit 250 stores information about the distance to the subject 300 in the storage unit 270 .
- the surface emitting laser device 100 is applied to the distance measuring device 200.
- the distance measuring device 200 can be used with low power consumption.
- the technology (the present technology) according to the present disclosure can be applied to various products.
- the technology according to the present disclosure can be realized as a device mounted on any type of moving body such as automobiles, electric vehicles, hybrid electric vehicles, motorcycles, bicycles, personal mobility, airplanes, drones, ships, and robots. may
- FIG. 17 is a block diagram showing a schematic configuration example of a vehicle control system, which is an example of a mobile control system to which the technology according to the present disclosure can be applied.
- a vehicle control system 12000 includes a plurality of electronic control units connected via a communication network 12001.
- the vehicle control system 12000 includes a drive system control unit 12010, a body system control unit 12020, an exterior information detection unit 12030, an interior information detection unit 12040, and an integrated control unit 12050.
- a microcomputer 12051, an audio/image output unit 12052, and an in-vehicle network I/F (interface) 12053 are illustrated.
- the drive system control unit 12010 controls the operation of devices related to the drive system of the vehicle according to various programs.
- the driving system control unit 12010 includes a driving force generator for generating driving force of the vehicle such as an internal combustion engine or a driving motor, a driving force transmission mechanism for transmitting the driving force to the wheels, and a steering angle of the vehicle. It functions as a control device such as a steering mechanism to adjust and a brake device to generate braking force of the vehicle.
- the body system control unit 12020 controls the operation of various devices equipped on the vehicle body according to various programs.
- the body system control unit 12020 functions as a keyless entry system, a smart key system, a power window device, or a control device for various lamps such as headlamps, back lamps, brake lamps, winkers or fog lamps.
- body system control unit 12020 can receive radio waves transmitted from a portable device that substitutes for a key or signals from various switches.
- the body system control unit 12020 receives the input of these radio waves or signals and controls the door lock device, power window device, lamps, etc. of the vehicle.
- the vehicle exterior information detection unit 12030 detects information outside the vehicle in which the vehicle control system 12000 is installed.
- the vehicle exterior information detection unit 12030 is connected with an imaging section 12031 .
- the vehicle exterior information detection unit 12030 causes the imaging unit 12031 to capture an image of the exterior of the vehicle, and receives the captured image.
- the vehicle exterior information detection unit 12030 may perform object detection processing or distance detection processing such as people, vehicles, obstacles, signs, or characters on the road surface based on the received image.
- the imaging unit 12031 is an optical sensor that receives light and outputs an electrical signal according to the amount of received light.
- the imaging unit 12031 can output the electric signal as an image, and can also output it as distance measurement information.
- the light received by the imaging unit 12031 may be visible light or non-visible light such as infrared rays.
- the in-vehicle information detection unit 12040 detects in-vehicle information.
- the in-vehicle information detection unit 12040 is connected to, for example, a driver state detection section 12041 that detects the state of the driver.
- the driver state detection unit 12041 includes, for example, a camera that captures an image of the driver, and the in-vehicle information detection unit 12040 detects the degree of fatigue or concentration of the driver based on the detection information input from the driver state detection unit 12041. It may be calculated, or it may be determined whether the driver is dozing off.
- the microcomputer 12051 calculates control target values for the driving force generator, the steering mechanism, or the braking device based on the information inside and outside the vehicle acquired by the vehicle exterior information detection unit 12030 or the vehicle interior information detection unit 12040, and controls the drive system control unit.
- a control command can be output to 12010 .
- the microcomputer 12051 realizes the functions of ADAS (Advanced Driver Assistance System) including collision avoidance or shock mitigation, follow-up driving based on inter-vehicle distance, vehicle speed maintenance driving, vehicle collision warning, or vehicle lane deviation warning. Cooperative control can be performed for the purpose of ADAS (Advanced Driver Assistance System) including collision avoidance or shock mitigation, follow-up driving based on inter-vehicle distance, vehicle speed maintenance driving, vehicle collision warning, or vehicle lane deviation warning. Cooperative control can be performed for the purpose of ADAS (Advanced Driver Assistance System) including collision avoidance or shock mitigation, follow-up driving based on inter-vehicle distance, vehicle speed maintenance driving, vehicle collision warning, or vehicle
- the microcomputer 12051 controls the driving force generator, the steering mechanism, the braking device, etc. based on the information about the vehicle surroundings acquired by the vehicle exterior information detection unit 12030 or the vehicle interior information detection unit 12040, so that the driver's Cooperative control can be performed for the purpose of autonomous driving, etc., in which vehicles autonomously travel without depending on operation.
- the microcomputer 12051 can output a control command to the body system control unit 12020 based on the information outside the vehicle acquired by the information detection unit 12030 outside the vehicle.
- the microcomputer 12051 controls the headlamps according to the position of the preceding vehicle or the oncoming vehicle detected by the vehicle exterior information detection unit 12030, and performs cooperative control aimed at anti-glare such as switching from high beam to low beam. It can be carried out.
- the audio/image output unit 12052 transmits at least one of audio and/or image output signals to an output device capable of visually or audibly notifying the passengers of the vehicle or the outside of the vehicle.
- an audio speaker 12061, a display unit 12062, and an instrument panel 12063 are illustrated as output devices.
- the display unit 12062 may include at least one of an on-board display and a head-up display, for example.
- FIG. 18 is a diagram showing an example of the installation position of the imaging unit 12031.
- the imaging unit 12031 has imaging units 12101, 12102, 12103, 12104, and 12105.
- the imaging units 12101, 12102, 12103, 12104, and 12105 are provided at positions such as the front nose of the vehicle 12100, the side mirrors, the rear bumper, the back door, and the upper part of the windshield in the vehicle interior, for example.
- An image pickup unit 12101 provided in the front nose and an image pickup unit 12105 provided above the windshield in the passenger compartment mainly acquire images in front of the vehicle 12100 .
- Imaging units 12102 and 12103 provided in the side mirrors mainly acquire side images of the vehicle 12100 .
- An imaging unit 12104 provided in the rear bumper or back door mainly acquires an image behind the vehicle 12100 .
- the imaging unit 12105 provided above the windshield in the passenger compartment is mainly used for detecting preceding vehicles, pedestrians, obstacles, traffic lights, traffic signs, lanes, and the like.
- FIG. 18 shows an example of the imaging range of the imaging units 12101 to 12104.
- the imaging range 12111 indicates the imaging range of the imaging unit 12101 provided in the front nose
- the imaging ranges 12112 and 12113 indicate the imaging ranges of the imaging units 12102 and 12103 provided in the side mirrors, respectively
- the imaging range 12114 The imaging range of an imaging unit 12104 provided in the rear bumper or back door is shown. For example, by superimposing the image data captured by the imaging units 12101 to 12104, a bird's-eye view image of the vehicle 12100 viewed from above can be obtained.
- At least one of the imaging units 12101 to 12104 may have a function of acquiring distance information.
- at least one of the imaging units 12101 to 12104 may be a stereo camera composed of a plurality of imaging elements, or may be an imaging element having pixels for phase difference detection.
- the microcomputer 12051 determines the distance to each three-dimensional object within the imaging ranges 12111 to 12114 and changes in this distance over time (relative velocity with respect to the vehicle 12100). , it is possible to extract, as the preceding vehicle, the closest three-dimensional object on the course of the vehicle 12100, which runs at a predetermined speed (for example, 0 km/h or more) in substantially the same direction as the vehicle 12100. can. Furthermore, the microcomputer 12051 can set the inter-vehicle distance to be secured in advance in front of the preceding vehicle, and perform automatic brake control (including following stop control) and automatic acceleration control (including following start control). In this way, cooperative control can be performed for the purpose of automatic driving in which the vehicle runs autonomously without relying on the operation of the driver.
- automatic brake control including following stop control
- automatic acceleration control including following start control
- the microcomputer 12051 converts three-dimensional object data related to three-dimensional objects to other three-dimensional objects such as motorcycles, ordinary vehicles, large vehicles, pedestrians, and utility poles. It can be classified and extracted and used for automatic avoidance of obstacles. For example, the microcomputer 12051 distinguishes obstacles around the vehicle 12100 into those that are visible to the driver of the vehicle 12100 and those that are difficult to see. Then, the microcomputer 12051 judges the collision risk indicating the degree of danger of collision with each obstacle, and when the collision risk is equal to or higher than the set value and there is a possibility of collision, an audio speaker 12061 and a display unit 12062 are displayed. By outputting an alarm to the driver via the drive system control unit 12010 and performing forced deceleration and avoidance steering via the drive system control unit 12010, driving support for collision avoidance can be performed.
- At least one of the imaging units 12101 to 12104 may be an infrared camera that detects infrared rays.
- the microcomputer 12051 can recognize a pedestrian by determining whether or not the pedestrian exists in the captured images of the imaging units 12101 to 12104 .
- recognition of a pedestrian is performed by, for example, a procedure for extracting feature points in images captured by the imaging units 12101 to 12104 as infrared cameras, and performing pattern matching processing on a series of feature points indicating the outline of an object to determine whether or not the pedestrian is a pedestrian.
- the audio image output unit 12052 outputs a rectangular outline for emphasis to the recognized pedestrian. is superimposed on the display unit 12062 . Also, the audio/image output unit 12052 may control the display unit 12062 to display an icon or the like indicating a pedestrian at a desired position.
- the technology according to the present disclosure can be applied to the vehicle exterior information detection unit 12030 among the configurations described above.
- the reliability of the vehicle exterior information detection unit 12030 can be improved.
- the present technology can also have the following configuration.
- a solder wetting layer connected by solder an adhesion layer consisting of one of two layers consisting of a titanium layer and a titanium nitride layer and a tantalum nitride layer;
- a light emitting device comprising a solder barrier layer formed between the solder wetting layer and the adhesion layer.
- the solder barrier layer contains one or more of cobalt, platinum, tantalum and tungsten.
- solder wetting layer connected to the silicon substrate by solder; an adhesion layer made of a titanium layer; A light emitting device comprising a solder barrier layer comprising one or more of cobalt, tantalum and tungsten and formed between the solder wetting layer and the adhesion layer.
- a solder-wetting layer connected by soldering, an adhesion layer made of one of two layers consisting of a titanium layer and a titanium nitride layer, and a tantalum nitride layer, and formed between the solder-wetting layer and the adhesion layer.
- a light-emitting device comprising a solder barrier layer
- a VoS (VCSEL on Silicon) device comprising: a silicon substrate on which the light emitting devices are arranged. (7) a solder wetting layer connected by solder; an adhesion layer made of a titanium layer; a light-emitting device comprising a solder barrier layer;
- a VoS (VCSEL on Silicon) device comprising: a silicon substrate on which the light emitting devices are arranged.
- REFERENCE SIGNS LIST 100 surface emitting laser device 110 laser chip 111 emitter array 112 emitter 112A, 112H contact layer 112B etching stop layer 112C, 112G DBR layer 112D, 112F spacer layer 112E active layer 112i current confinement layer 112i-1 current injection region 112i-2 current confinement Region 112K Ring electrode layer 112L Metal layer 112L-1 Connection electrode 112L-2 Reflective metal 112M Layer to be oxidized 112x Mesa portion 113 Substrate 113A AR (Anti-reflection) layer 114 Solder bump 114-1 Barrier metal 115a, 115b Insulating film 116 Pedestal Part 117, 118 Electrode layer 119 Connection layer 120 Laser driver IC (Integrated Circuit) 122c connection pad 130 system controller 140 printed wiring board 141 connection pad 143 bonding layer 144 bonding wire 200 distance measuring device 210, 230 lens 220 light receiving device 240 signal processing section 250 control section 260 display section 270 storage section 300 subject
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Optics & Photonics (AREA)
- Semiconductor Lasers (AREA)
Abstract
レーザドライバと接続される発光デバイスにおいて、接続の信頼性を向上させる。 発光デバイスは、半田濡れ層、密着層および半田バリア層を具備する。この発光デバイスにおいて、半田濡れ層は、半田により接続される。また、その発光デバイスにおいて、密着層は、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる。また、その発光デバイスにおいて、半田バリア層は、半田濡れ層と密着層との間に形成される。
Description
本技術は、発光デバイスに関する。詳しくは、シリコン基板に実装される発光デバイスおよびVoSデバイスに関する。
従来より、レーザ装置などにおいて二次元アレイ状に発光デバイスを配列する際には、発光デバイスとしてVCSEL(Vertical Cavity Surface Emitting Laser)が用いられることが多い。例えば、複数の発光デバイスをレーザチップに二次元アレイ状に実装し、そのレーザチップをレーザドライバと接続したレーザ装置が提案されている(例えば、特許文献1参照。)。このレーザ装置において発光デバイスは、バンプを介してレーザドライバと接続される。また、発光デバイスのうちバンプと半田により接続される金属層は、レーザチップ側から順にTi(チタン)、Pt(白金)、および、Au(金)を積層することにより構成される。
上述の従来技術では、バンプを介してレーザチップとレーザドライバとを電気的に接続することにより、ワイヤボンディングを用いる場合と比較して、配線引き回しに起因する抵抗の低減を図っている。しかしながら、バンプにはんだを用いた場合、Pt層の半田への拡散が早く、高温での放置や再リフローによりTi層とPt層との界面で剥離が生じ、レーザドライバとの接続の信頼性が低下するおそれがある。
本技術はこのような状況に鑑みて生み出されたものであり、レーザドライバと接続される発光デバイスにおいて、接続の信頼性を向上させることを目的とする。
本技術は、上述の問題点を解消するためになされたものであり、その第1の側面は、半田により接続される半田濡れ層と、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、上記半田濡れ層と上記密着層との間に形成される半田バリア層とを具備する発光デバイスである。これにより、信頼性が向上するという作用をもたらす。
また、この第1の側面において、上記半田バリア層は、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含むものであってもよい。これにより、半田の拡散が遅くなるという作用をもたらす。
また、この第1の側面において、上記半田濡れ層は、金、白金および銅のうち1つ以上を含むものであってもよい。これにより、金、白金や銅が半田により接続されるという作用をもたらす。
また、本技術の第2の側面は、シリコン基板に半田により接続される半田濡れ層と、チタン層からなる密着層と、コバルト、タンタルおよびタングステンのうち1つ以上を含み、上記半田濡れ層と上記密着層との間に形成される半田バリア層とを具備する発光デバイスである。これにより、信頼性が向上するという作用をもたらす。
また、この第2の側面において、上記半田濡れ層は、金、白金および銅のうち1つ以上を含むものであってもよい。これにより、金、白金や銅が半田により接続されるという作用をもたらす。
また、本技術の第3の側面は、半田により接続される半田濡れ層と、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、上記半田濡れ層と上記密着層との間に形成される半田バリア層とを備える発光デバイスと、上記発光デバイスが配列されるシリコン基板とを具備するVoS(VCSEL on Silicon)デバイスである。これにより、信頼性が向上するという作用をもたらす。
また、本技術の第4の側面は、半田により接続される半田濡れ層と、チタン層からなる密着層と、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含み、上記半田濡れ層と上記密着層との間に形成される半田バリア層とを備える発光デバイスと、上記発光デバイスが配列されるシリコン基板とを具備するVoS(VCSEL on Silicon)デバイスである。これにより、信頼性が向上するという作用をもたらす。
以下、本技術を実施するための形態(以下、実施の形態と称する)について説明する。説明は以下の順序により行う。
1.第1の実施の形態(Ti/TiNまたはTaNの密着層を形成した例)
2.第2の実施の形態(Co、TaおよびWのうち1つ以上を含む半田バリア層を形成した例)
3.適用例
4.移動体への応用例
1.第1の実施の形態(Ti/TiNまたはTaNの密着層を形成した例)
2.第2の実施の形態(Co、TaおよびWのうち1つ以上を含む半田バリア層を形成した例)
3.適用例
4.移動体への応用例
<1.第1の実施の形態>
[面発光レーザ装置の構成例]
本開示の一実施の形態に係る面発光レーザ装置100について説明する。図1は、面発光レーザ装置100の上面構成例を表したものである。図2は、図1の面発光レーザ装置100のA-A線での断面構成例を表したものである。
[面発光レーザ装置の構成例]
本開示の一実施の形態に係る面発光レーザ装置100について説明する。図1は、面発光レーザ装置100の上面構成例を表したものである。図2は、図1の面発光レーザ装置100のA-A線での断面構成例を表したものである。
面発光レーザ装置100は、薄型で低消費電力が要求される用途や、薄型で大面積が要求される用途などに好適に適用可能な裏面出射型のレーザである。面発光レーザ装置100は、レーザチップ110と、レーザドライバIC(Integrated Circuit)120とを備えている。本実施の形態では、レーザチップ110は、レーザドライバIC120上に配置されている。レーザチップ110は、例えば、複数の半田バンプ114を介して、レーザドライバIC120と電気的に接続されている。以下、レーザチップ110のチップ平面に平行な所定の軸を「X軸」とし、そのチップ平面に垂直な軸を「Z軸」とする。X軸およびZ軸に垂直な軸を「Y軸」とする。図1は、Z軸方向から見た平面図であり、図2は、Y軸方向から見た断面図である。
レーザチップ110は、例えば、基板113と、基板113の、レーザドライバIC120側の面に形成されたエミッタアレイ111と、基板113の、レーザドライバIC120側の面に形成された複数の半田バンプ114と、基板113の、レーザドライバIC120とは反対側の面(光出射面)に形成されたAR(Anti-reflection)層113Aとを有している。エミッタアレイ111は、基板113の光出射面とは反対側に配置されている。AR層113Aは、例えば、SiO2およびSiNを積層させた積層体で構成されている。
エミッタアレイ111は、例えば、図1、図2に示したように、同一の基板113上に配置された複数のエミッタ112によって構成されている。複数のエミッタ112は、例えば、基板113上に行方向に等間隔で配置されるとともに、列方向にも等間隔で配置されている。なお、複数のエミッタ112は、同一の基板113上にランダムに配置されていてもよい。各エミッタ112は、積層方向にレーザ光を出射する面発光型の半導体レーザ、すなわちVCSELによって構成されている。本実施の形態では、各エミッタ112は、基板113およびAR層113Aを介して、レーザドライバIC120とは反対側にレーザ光を出射する。基板113は、例えば、エミッタ112から発せられる光を透過する半絶縁性の半導体基板(例えば、Si-GaAs基板)によって構成されている。なお、エミッタ112は、特許請求の範囲に記載の発光デバイスの一例であり、基板113は、特許請求の範囲に記載のシリコン基板の一例である。面発光レーザ装置100は、特許請求の範囲に記載のVoSデバイスの一例である。
各エミッタ112は、例えば、図3におけるaに示したように、エッチングストップ層112B、DBR(Distributed Bragg Reflector)層112C、スペーサ層112D、活性層112E、スペーサ層112F、DBR層112Gおよびコンタクト層112Hを、基板113側から順に積層してなる柱状の垂直共振器構造(メサ部112x)を有している。各メサ部112xの直径(メサ径)は、各メサ部112xから出射されるレーザ光のビームピッチよりも若干小さな大きさとなっている。例えば、ビームピッチを18μm程度にしようとした場合、各メサ部112xの直径(メサ径)は14μm程度となっている。各メサ部112xにおいて、DBR層112C,112Gは、活性層112Eを挟み込んでいる。各エミッタ112は、エッチングストップ層112Bに接するコンタクト層112Aを有している。コンタクト層112Aは、各メサ部112x(具体的には後述のDBR層112C)と、後述の電極層117とを互いにオーミック接触させるための層である。コンタクト層112Aは、各メサ部112xと、基板113との間に設けられており、各メサ部112xおよび基板113に接している。基板113は、コンタクト層112Aのうち、活性層112Eとは反対側に接して設けられている。
各エミッタ112において、コンタクト層112Aは共有されている。つまり、複数のメサ部112xは、同一のコンタクト層112A上に配置されており、レーザチップ110において、各メサ部112xは、レーザドライバIC120側に突出している。各メサ部112xにおいて、コンタクト層112HがレーザドライバIC120側の端面となっている。以下では、メサ部112xの、レーザドライバIC120側の端面を、便宜的に、メサ部112xの上面と称する場合がある。各エミッタ112において、DBR層112G内には、電流狭窄層112iが設けられている。なお、図3は、図2に記載のレーザチップ110のうち、破線で囲まれた箇所の断面構成例を表したものである。本実施の形態では、各メサ部112xは、例えば、基板113を、結晶成長基板として形成されたものである。
各メサ部112xおよびコンタクト層112Aは、例えば、GaAs系半導体によって構成されている。コンタクト層112Aは、例えばp型Alx1Ga1-x1As(0≦x1<1)からなる。エッチングストップ層112Bは、例えばp型Inx2Ga1-x2P(0<x2<1)からなる。DBR層112Cは、低屈折率層(図示せず)および高屈折率層(図示せず)を交互に積層して構成されたものである。DBR層112Cにおいて、低屈折率層は例えば光学厚さがλ×1/4(λ1は発振波長)のp型Alx3Ga1-x3As(0<x3<1)からなり、高屈折率層は例えば光学厚さがλ×1/4のp型Alx4Ga1-x4As(0≦x4<x3)からなる。スペーサ層112Dは、例えばp型Alx5Ga1-x5As(0≦x5<1)からなる。コンタクト層112A、エッチングストップ層112B、DBR層112Cおよびスペーサ層112Dには、例えばカーボン(C)などのp型不純物が含まれている。つまり、コンタクト層112A、エッチングストップ層112B、DBR層112Cおよびスペーサ層112Dは、p型半導体で構成されている。
活性層112Eは、例えば、アンドープのInx6Ga1-x6As(0<x6<1)からなる井戸層(図示せず)およびアンドープのInx7Ga1-x7As(0<x7<x6)からなる障壁層(図示せず)を交互に積層してなる多重量子井戸構造となっている。なお、活性層112Eのうち電流注入領域112i-1(後述)との対向領域が発光領域となる。
スペーサ層112Fは、例えばn型Alx8Ga1-x8As(0≦x8<1)からなる。DBR層112Gは、低屈折率層(図示せず)および高屈折率層(図示せず)を交互に積層して構成されたものである。DBR層112Gにおいて、低屈折率層は例えば光学厚さがλ×1/4のn型Alx9Ga1-x9As(0<x9<1)からなり、高屈折率層は例えば光学厚さがλ×1/4のn型Alx10Ga1-x10As(0≦x10<x9)からなる。コンタクト層112Hは、DBR層112Gと、リング電極層112Kとを互いにオーミック接触させるための層である。コンタクト層112Hは、例えばn型Alx11Ga1-x11As(0≦x11<1)からなる。スペーサ層112F、DBR層112Gおよびコンタクト層112Hには、例えばケイ素(Si)などのn型不純物が含まれている。つまり、スペーサ層112F、DBR層112Gおよびコンタクト層112Hは、n型半導体で構成されている。
DBR層112Gにおける低屈折率層および高屈折率層のペア数は、例えば、DBR層112Cにおける低屈折率層および高屈折率層のペア数よりも少なくなっている。DBR層112Gのペア数は、後述の絶縁膜115aおよび金属層112Lが設けられていないときにDBR層として必要となるペア数の半分以下の数となっている。これは、絶縁膜115aおよび金属層112Lが、DBR層112Gの光反射機能を補助しているからであり、絶縁膜115aおよび金属層112Lによる光反射の能力の分だけ、DBR層112Gにおける低屈折率層および高屈折率層のペア数を少なくすることができるからである。
電流狭窄層112iは、電流注入領域112i-1および電流狭窄領域112i-2を有する。電流狭窄領域112i-2は、電流注入領域112i-1の周辺領域に形成されている。電流注入領域112i-1は、例えばp型Alx12Ga1-x12As(0<x12≦1)からなる。電流狭窄領域112i-2は、例えば、Al2O3(酸化アルミニウム)を含んで構成されており、例えば、被酸化層112M(後述)に含まれる高濃度のAlを、側面から酸化することにより得られる。従って、電流狭窄層112iは電流を狭窄する機能を有している。
各エミッタ112は、さらに、例えば、図3におけるa、図4におけるbに示したように、コンタクト層112Hに接するリング電極層112Kを有している。つまり、リング電極層112Kは、基板113の光出射面とは反対側に配置されており、メサ部112xの上面に接して形成されている。リング電極層112Kは、活性層112Eの発光領域(または電流注入領域112i-1)と非対向の位置に形成されており、活性層112Eの発光領域(または電流注入領域112i-1)と対向する位置に開口を有するリング形状の電極である。リング電極層112Kは、コンタクト層112Hのうち、活性層112Eの発光領域(または電流注入領域112i-1)と非対向の部分に接している。従って、リング電極層112Kは、コンタクト層112Hを介してDBR層112Gと電気的に接続されている。リング電極層112Kは、合金を含んで構成されている。リング電極層112Kは、例えば、コンタクト層112Hに接する合金を含んで構成されおり、例えば、AuGe、Ni、Auをコンタクト層112H側から順に積層して構成された積層体となっている。
各エミッタ112は、さらに、例えば、図3におけるa、図4におけるaに示したように、リング電極層112Kに接する金属層112Lを有している。金属層112Lは、リング電極層112Kの開口を塞ぐように形成されており、金属層112Lの外縁部分(電流注入領域112i-1と非対向の部分)が、リング電極層112Kに接している。従って、金属層112Lは、リング電極層112Kおよびコンタクト層112Hを介してDBR層112Gと電気的に接続されている。金属層112Lは、半田バンプ114にも接しており、半田バンプ114を介してレーザドライバIC120と電気的に接続されている。同図の114-1は、レーザドライバIC120側のバリアメタル114-1であり、例えば、Ni、Cuの積層体である。金属層112Lは、例えば、レーザドライバIC120内のNMOSと電気的に接続されている。金属層112Lは、非合金によって構成されており、各種の金属層をリング電極層112K側から順に積層して構成された積層体となっている。
図3におけるbは、金属層112Lの一構成例を示す図である。この金属層112Lは、反射メタル112L-2と、接続電極112L-1とからなる。反射メタル112L-2は、基板113側に形成され、エミッタ112のアノード電極として機能する。反射メタル112L-2として、例えば、Ti(チタン)およびAu(金)を積層した積層膜が用いられる。
接続電極112L-1は、反射メタル112L-2と半田バンプ114との間に形成される。この接続電極112L-1は、Z軸方向に積層した半田濡れ層410、半田バリア層420および密着層430から構成される。
半田濡れ層410は、半田バンプ114と接続される層であり、エミッタ112の上面の酸化を抑制する機能を有する。半田濡れ層410は、例えば、Au(金)、Pt(白金)およびCu(銅)のうち1つ以上を含む。同図におけるbでは、Auのみが用いられている。また、半田濡れ層410の膜厚は、例えば、5乃至100ナノメートル(nm)である。ただし、半田濡れ層410が厚すぎると、半田濡れ層410の金属(Auなど)が半田バンプ114に拡散してボイドの要因になるため、半田濡れ層410の膜厚は、レーザドライバIC120側の半田量に併せて制御する必要がある。
半田バリア層420は、半田濡れ層410と密着層430との間に形成される。この半田バリア層420は、例えば、Co(コバルト)、Pt、Ta(タンタル)およびW(タングステン)のうち1つ以上を含む。同図におけるbでは、Coのみが用いられている。Coは、半田に対する拡散が遅く、高温での放置や再リフロー後も残存する。このため、剥離が生じにくくなる。Ta、WなどについてもPtよりも拡散が遅いため、剥離を抑制することができる。また、半田バリア層420の膜厚は、例えば、100乃至500ナノメートル(nm)である。
密着層430は、コンタクト層112Hと半田バリア層420との間に形成される。この密着層430は、Ti(チタン)層およびTiN(窒化チタン)層からなる2層と、TaN(窒化タンタル)層との一方からなる層である。同図では、例えば、Ti層432およびTiN層431が用いられている。Ti層432は、基板113側に形成される。また、Ti層432の膜厚は、例えば、10乃至100ナノメートル(nm)であり、TiN層431の膜厚は、10乃至100ナノメートル(nm)である。
これらの反射メタル112L-2および接続電極112L-1は、リフトオフによりパターニングを一括で行ってもよいし、パターニングを分割して行い反射メタル112L-2と接続電極112L-1のサイズを変えてもよい。
Ti層432およびTiN層431、または、TaN層を密着層430とすることにより、Tiのみを密着層とする場合と比較して、半田バリア層420がPtであってもTiとPtとの界面がなくなるため、剥離を防止することができる。
また、図3におけるaに例示するように、金属層112Lは、メサ部112xの上面(コンタクト層112H)には直接、接していない。金属層112Lの中央部分(電流注入領域112i-1と対向する部分)は、後述の絶縁膜115aを介して、メサ部112xの上面(コンタクト層112H)に積層されている。金属層112Lの中央部分、および絶縁膜115aは、活性層112Eの発光領域(または電流注入領域112i-1)と対向する位置に設けられており、活性層112Eから見てDBR層112G側の反射ミラーの終端部に相当する。
各エミッタ112は、さらに、例えば、図3におけるaに示したように、コンタクト層112Aに接する電極層117を有している。電極層117は、基板113の光出射面とは反対側に配置されており、コンタクト層112Aのうち、メサ部112xと非対向の位置に接している。電極層117は、例えば、コンタクト層112Aのうち、メサ部112xのすそ野に相当する箇所に接している。従って、電極層117は、コンタクト層112Aを介してDBR層112Cと電気的に接続されている。電極層117は、非合金によって構成されており、例えば、Ti、Pt、Auをコンタクト層112A側から順に積層して構成された積層体となっている。
図5は、レーザドライバIC120をプリント配線基板140上に実装したときの平面構成例を表したものである。面発光レーザ装置100において、プリント配線基板140には、例えば、レーザドライバIC120の他に、システムコントローラ130が設けられている。図6は、図5のA-A線での断面構成例を表したものである。レーザドライバIC120とプリント配線基板140との間には接合層143が設けられている。接合層143は、レーザドライバIC120とプリント配線基板140とを互いに固定している。接合層143は、例えば、絶縁性を有する樹脂材料によって構成されている。
レーザドライバIC120とプリント配線基板140とは、ボンディングワイヤ144によって電気的に接続されている。ボンディングワイヤ144の一端が、レーザドライバIC120の接続パッド122cに対して固定されており、ボンディングワイヤ144の他端が、プリント配線基板140の接続パッド141に対して接続されている。
[製造方法]
次に、本実施の形態に係る面発光レーザ装置100の製造方法について説明する。図7~図16は、面発光レーザ装置100におけるレーザチップ110の製造過程の一例を表したものである。
次に、本実施の形態に係る面発光レーザ装置100の製造方法について説明する。図7~図16は、面発光レーザ装置100におけるレーザチップ110の製造過程の一例を表したものである。
レーザチップ110を製造するためには、例えばGaAsからなる基板113上に、化合物半導体を、例えばMOCVD(Metal Organic Chemical Vapor Deposition :有機金属気相成長)法などのエピタキシャル結晶成長法により一括に形成する。この際、化合物半導体の原料としては、例えば、トリメチルアルミニウム(TMAl)、トリメチルガリウム(TMGa)、トリメチルインジウム(TMIn)などのメチル系有機金属ガスと、アルシン(AsH3)ガスを用い、ドナー不純物の原料としては、例えばジシラン(Si2H6)を用い、アクセプタ不純物の原料としては、例えば四臭化炭素(CBr4)を用いる。
まず、基板113の表面上に、例えばMOCVD法などのエピタキシャル結晶成長法により、コンタクト層112A、エッチングストップ層112B、被酸化層112Mを含むDBR層112C、スペーサ層112D、活性層112E、スペーサ層112F、DBR層112Gおよびコンタクト層112Hをこの順に形成する(図7)。次に、例えば、所定のパターンのレジスト層(図示せず)を形成したのち、このレジスト層をマスクとして、コンタクト層112H、DBR層112G、スペーサ層112F、活性層112E、スペーサ層112DおよびDBR層112Cを選択的にエッチングする。このとき、例えばCl系ガスによるRIE(Reactive Ion Etching)を用いることが好ましい。これにより、例えば、図8に示したように、エッチングストップ層112Bの表面にまで達する高さの柱状のメサ部112xおよび台座部116が形成される。このとき、メサ部112xの側面に被酸化層112Mが露出している。その後、レジスト層を除去する。
次に、水蒸気雰囲気中において、高温で酸化処理を行い、メサ部112xの側面から被酸化層112Mに含まれるAlを選択的に酸化する。または、ウエット酸化法により、メサ部112xの側面から被酸化層112Mに含まれるAlを選択的に酸化する。これにより、メサ部112x内において、被酸化層112Mの外縁領域が絶縁層(酸化アルミニウム)となり、電流狭窄層112iが形成される(図9)。
次に、メサ部112xの上面にリング電極層112Kを形成する(図10におけるa)。図10におけるbは、同図におけるaのリング電極層112Kの形成個所を拡大したものである。同図におけるaでは、同図におけるbと比較してリング電極層112Kの形状が異なるが、記載の便宜上、同図におけるaでは電極の形状を模式的に表しているためである。
図11におけるaに例示するように、リング電極層112Kの周囲にリフトオフレジスト500が塗布される。そして、同図におけるbに例示するように、スパッタリングや蒸着により、Ti/Auなどの反射メタル112L-2が形成される。次に同図にcに例示するように、スパッタリングや蒸着により、TiN/Ti/Co/Auなどの接続電極112L-1が形成される。次に同図におけるdに例示するようにリフトオフレジスト500が除去(すなわち、リフトオフ)される。
続いて、例えば、CVDなどを用いて、リング電極層112Kに対向する部分と、メサ部112xのすそ野部分とに開口を有する絶縁膜115aを形成する。このようにして、コンタクト層112A上に、複数のエミッタ112が形成される。
次に、例えば、蒸着またはスパッタなどを用いて、台座部116上に電極層118を形成する(図12)。続いて、例えば、メッキ法を用いて、各エミッタ112の電極層117と、台座部116上の電極層118とを接続する連結層119を形成する(図13)。なお、メッキ法を用いる前に、絶縁膜115aのうち、連結層119を形成することとなる箇所に、例えば、蒸着またはスパッタなどを用いて、メッキの種となる下地層を形成しておく。連結層119の厚さは、電圧降下を十分に防ぐことの可能な厚さ(例えば、2μm程度)となっている。
次に、絶縁膜115aのうち、ダイシングを行う部分を除去したのち、例えば、CVDなどを用いて、各エミッタ112の側面や、連結層119の表面を覆う絶縁膜115bを形成する(図14)。続いて、例えば、グラインダーなどを用いて、基板113を薄膜化した後、例えば、CVDやスパッタなどを用いて、基板113の裏面にAR層113Aを形成する。最後の、基板113をダイシングする。このようにして、レーザチップ110が製造される。
なお、上述した例では、メサ部112xの形成後に、リング電極層112K、反射メタル112L-2、電極層117や118を形成しているが、この順に限定されない。リング電極層112K、反射メタル112L-2、電極層117や118の形成後にメサ部112xを形成することもできる。
このように、本技術の第1の実施の形態によれば、Ti/TiNまたはTaNの密着層430と、半田バリア層420と、半田濡れ層410とからなる接続電極112L-1を形成したため、半田バリア層420がPtであってもPt/Tiの界面が無くなる。これにより、密着層430をTiのみとした場合と比較して、剥離を防止し、接続の信頼性を向上させることができる。
<2.第2の実施の形態>
上述の第1の実施の形態では、Ti/TiNまたはTaNの密着層430を形成していたが、この構成に限定されず、密着層430をTiのみにすることもできる。この第2の実施の形態の面発光レーザ装置100は、密着層430をTiのみとした点において第1の実施の形態と異なる。
上述の第1の実施の形態では、Ti/TiNまたはTaNの密着層430を形成していたが、この構成に限定されず、密着層430をTiのみにすることもできる。この第2の実施の形態の面発光レーザ装置100は、密着層430をTiのみとした点において第1の実施の形態と異なる。
図15は、本技術の第2の実施の形態における金属層112Lの一構成例を示す断面図である。第2の実施の形態において、密着層430は、Tiのみからなる。また、第2の実施の形態において半田バリア層420は、Ptを含まず、例えば、Co、TaおよびWのうち1つ以上を含む。同図においては、Coが用いられる。
第2の実施の形態の半田濡れ層410は、第1の実施の形態と同様に、Au、PtおよびCuのうち1つ以上を含む。同図では、Auのみが用いられている。
このように、本技術の第2の実施の形態によれば、Co、TaおよびWのうち1つ以上を含む半田バリア層420をTiの密着層430と半田濡れ層410との間に形成したため、Pt/Tiの界面が無くなる。これにより、半田バリア層420がPtを含む場合と比較して、剥離を防止し、接続の信頼性を向上させることができる。
<3.適用例>
以下に、上記各実施の形態に係る面発光レーザ装置100の適用例について説明する。
以下に、上記各実施の形態に係る面発光レーザ装置100の適用例について説明する。
図16は、面発光レーザ装置100を備えた距離測定装置200の概略構成の一例を表したものである。距離測定装置200は、TOF(Time Of Flight)方式により被検体300までの距離を測定するものである。距離測定装置200は、光源として面発光レーザ装置100を備えている。距離測定装置200は、例えば、面発光レーザ装置100、受光装置220、レンズ210,230、信号処理部240、制御部250、表示部260および記憶部270を備えている。
受光装置220は、被検体300で反射された光を検出する。レンズ210は、面発光レーザ装置100から出射された光を平行光化するためのレンズであり、コリメートレンズである。レンズ230は、被検体300で反射された光を集光し、受光装置220に導くためのレンズであり、集光レンズである。
信号処理部240は、受光装置220から入力された信号と、制御部250から入力された参照信号との差分に対応する信号を生成するための回路である。制御部250は、例えば、Time to Digital Converter (TDC)を含んで構成されている。参照信号は、制御部250から入力される信号であってもよいし、面発光レーザ装置100の出力を直接検出する検出部の出力信号であってもよい。制御部250は、例えば、面発光レーザ装置100、受光装置220、信号処理部240、表示部260および記憶部270を制御するプロセッサである。制御部250は、信号処理部240で生成された信号に基づいて、被検体300までの距離を計測する回路である。制御部250は、被検体300までの距離についての情報を表示するための映像信号を生成し、表示部260に出力する。表示部260は、制御部250から入力された映像信号に基づいて、被検体300までの距離についての情報を表示する。制御部250は、被検体300までの距離についての情報を記憶部270に格納する。
本適用例では、面発光レーザ装置100が距離測定装置200に適用される。これにより、距離測定装置200を低消費電力で利用することができる。
<4.移動体への応用例>
本開示に係る技術(本技術)は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット等のいずれかの種類の移動体に搭載される装置として実現されてもよい。
本開示に係る技術(本技術)は、様々な製品へ応用することができる。例えば、本開示に係る技術は、自動車、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナルモビリティ、飛行機、ドローン、船舶、ロボット等のいずれかの種類の移動体に搭載される装置として実現されてもよい。
図17は、本開示に係る技術が適用され得る移動体制御システムの一例である車両制御システムの概略的な構成例を示すブロック図である。
車両制御システム12000は、通信ネットワーク12001を介して接続された複数の電子制御ユニットを備える。図17に示した例では、車両制御システム12000は、駆動系制御ユニット12010、ボディ系制御ユニット12020、車外情報検出ユニット12030、車内情報検出ユニット12040、及び統合制御ユニット12050を備える。また、統合制御ユニット12050の機能構成として、マイクロコンピュータ12051、音声画像出力部12052、及び車載ネットワークI/F(interface)12053が図示されている。
駆動系制御ユニット12010は、各種プログラムにしたがって車両の駆動系に関連する装置の動作を制御する。例えば、駆動系制御ユニット12010は、内燃機関又は駆動用モータ等の車両の駆動力を発生させるための駆動力発生装置、駆動力を車輪に伝達するための駆動力伝達機構、車両の舵角を調節するステアリング機構、及び、車両の制動力を発生させる制動装置等の制御装置として機能する。
ボディ系制御ユニット12020は、各種プログラムにしたがって車体に装備された各種装置の動作を制御する。例えば、ボディ系制御ユニット12020は、キーレスエントリシステム、スマートキーシステム、パワーウィンドウ装置、あるいは、ヘッドランプ、バックランプ、ブレーキランプ、ウィンカー又はフォグランプ等の各種ランプの制御装置として機能する。この場合、ボディ系制御ユニット12020には、鍵を代替する携帯機から発信される電波又は各種スイッチの信号が入力され得る。ボディ系制御ユニット12020は、これらの電波又は信号の入力を受け付け、車両のドアロック装置、パワーウィンドウ装置、ランプ等を制御する。
車外情報検出ユニット12030は、車両制御システム12000を搭載した車両の外部の情報を検出する。例えば、車外情報検出ユニット12030には、撮像部12031が接続される。車外情報検出ユニット12030は、撮像部12031に車外の画像を撮像させるとともに、撮像された画像を受信する。車外情報検出ユニット12030は、受信した画像に基づいて、人、車、障害物、標識又は路面上の文字等の物体検出処理又は距離検出処理を行ってもよい。
撮像部12031は、光を受光し、その光の受光量に応じた電気信号を出力する光センサである。撮像部12031は、電気信号を画像として出力することもできるし、測距の情報として出力することもできる。また、撮像部12031が受光する光は、可視光であっても良いし、赤外線等の非可視光であっても良い。
車内情報検出ユニット12040は、車内の情報を検出する。車内情報検出ユニット12040には、例えば、運転者の状態を検出する運転者状態検出部12041が接続される。運転者状態検出部12041は、例えば運転者を撮像するカメラを含み、車内情報検出ユニット12040は、運転者状態検出部12041から入力される検出情報に基づいて、運転者の疲労度合い又は集中度合いを算出してもよいし、運転者が居眠りをしていないかを判別してもよい。
マイクロコンピュータ12051は、車外情報検出ユニット12030又は車内情報検出ユニット12040で取得される車内外の情報に基づいて、駆動力発生装置、ステアリング機構又は制動装置の制御目標値を演算し、駆動系制御ユニット12010に対して制御指令を出力することができる。例えば、マイクロコンピュータ12051は、車両の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、車両の衝突警告、又は車両のレーン逸脱警告等を含むADAS(Advanced Driver Assistance System)の機能実現を目的とした協調制御を行うことができる。
また、マイクロコンピュータ12051は、車外情報検出ユニット12030又は車内情報検出ユニット12040で取得される車両の周囲の情報に基づいて駆動力発生装置、ステアリング機構又は制動装置等を制御することにより、運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行うことができる。
また、マイクロコンピュータ12051は、車外情報検出ユニット12030で取得される車外の情報に基づいて、ボディ系制御ユニット12020に対して制御指令を出力することができる。例えば、マイクロコンピュータ12051は、車外情報検出ユニット12030で検知した先行車又は対向車の位置に応じてヘッドランプを制御し、ハイビームをロービームに切り替える等の防眩を図ることを目的とした協調制御を行うことができる。
音声画像出力部12052は、車両の搭乗者又は車外に対して、視覚的又は聴覚的に情報を通知することが可能な出力装置へ音声及び画像のうちの少なくとも一方の出力信号を送信する。図17の例では、出力装置として、オーディオスピーカ12061、表示部12062及びインストルメントパネル12063が例示されている。表示部12062は、例えば、オンボードディスプレイ及びヘッドアップディスプレイの少なくとも一つを含んでいてもよい。
図18は、撮像部12031の設置位置の例を示す図である。
図18では、撮像部12031として、撮像部12101,12102,12103,12104,12105を有する。
撮像部12101,12102,12103,12104,12105は、例えば、車両12100のフロントノーズ、サイドミラー、リアバンパ、バックドア及び車室内のフロントガラスの上部等の位置に設けられる。フロントノーズに備えられる撮像部12101及び車室内のフロントガラスの上部に備えられる撮像部12105は、主として車両12100の前方の画像を取得する。サイドミラーに備えられる撮像部12102,12103は、主として車両12100の側方の画像を取得する。リアバンパ又はバックドアに備えられる撮像部12104は、主として車両12100の後方の画像を取得する。車室内のフロントガラスの上部に備えられる撮像部12105は、主として先行車両又は、歩行者、障害物、信号機、交通標識又は車線等の検出に用いられる。
なお、図18には、撮像部12101ないし12104の撮影範囲の一例が示されている。撮像範囲12111は、フロントノーズに設けられた撮像部12101の撮像範囲を示し、撮像範囲12112,12113は、それぞれサイドミラーに設けられた撮像部12102,12103の撮像範囲を示し、撮像範囲12114は、リアバンパ又はバックドアに設けられた撮像部12104の撮像範囲を示す。例えば、撮像部12101ないし12104で撮像された画像データが重ね合わせられることにより、車両12100を上方から見た俯瞰画像が得られる。
撮像部12101ないし12104の少なくとも1つは、距離情報を取得する機能を有していてもよい。例えば、撮像部12101ないし12104の少なくとも1つは、複数の撮像素子からなるステレオカメラであってもよいし、位相差検出用の画素を有する撮像素子であってもよい。
例えば、マイクロコンピュータ12051は、撮像部12101ないし12104から得られた距離情報を基に、撮像範囲12111ないし12114内における各立体物までの距離と、この距離の時間的変化(車両12100に対する相対速度)を求めることにより、特に車両12100の進行路上にある最も近い立体物で、車両12100と略同じ方向に所定の速度(例えば、0km/h以上)で走行する立体物を先行車として抽出することができる。さらに、マイクロコンピュータ12051は、先行車の手前に予め確保すべき車間距離を設定し、自動ブレーキ制御(追従停止制御も含む)や自動加速制御(追従発進制御も含む)等を行うことができる。このように運転者の操作に拠らずに自律的に走行する自動運転等を目的とした協調制御を行うことができる。
例えば、マイクロコンピュータ12051は、撮像部12101ないし12104から得られた距離情報を元に、立体物に関する立体物データを、2輪車、普通車両、大型車両、歩行者、電柱等その他の立体物に分類して抽出し、障害物の自動回避に用いることができる。例えば、マイクロコンピュータ12051は、車両12100の周辺の障害物を、車両12100のドライバが視認可能な障害物と視認困難な障害物とに識別する。そして、マイクロコンピュータ12051は、各障害物との衝突の危険度を示す衝突リスクを判断し、衝突リスクが設定値以上で衝突可能性がある状況であるときには、オーディオスピーカ12061や表示部12062を介してドライバに警報を出力することや、駆動系制御ユニット12010を介して強制減速や回避操舵を行うことで、衝突回避のための運転支援を行うことができる。
撮像部12101ないし12104の少なくとも1つは、赤外線を検出する赤外線カメラであってもよい。例えば、マイクロコンピュータ12051は、撮像部12101ないし12104の撮像画像中に歩行者が存在するか否かを判定することで歩行者を認識することができる。かかる歩行者の認識は、例えば赤外線カメラとしての撮像部12101ないし12104の撮像画像における特徴点を抽出する手順と、物体の輪郭を示す一連の特徴点にパターンマッチング処理を行って歩行者か否かを判別する手順によって行われる。マイクロコンピュータ12051が、撮像部12101ないし12104の撮像画像中に歩行者が存在すると判定し、歩行者を認識すると、音声画像出力部12052は、当該認識された歩行者に強調のための方形輪郭線を重畳表示するように、表示部12062を制御する。また、音声画像出力部12052は、歩行者を示すアイコン等を所望の位置に表示するように表示部12062を制御してもよい。
以上、本開示に係る技術が適用され得る車両制御システムの一例について説明した。本開示に係る技術は、以上説明した構成のうち、車外情報検出ユニット12030に適用され得る。車外情報検出ユニット12030に本開示に係る技術を適用することにより、車外情報検出ユニット12030の信頼性を向上させることができる。
なお、上述の実施の形態は本技術を具現化するための一例を示したものであり、実施の形態における事項と、特許請求の範囲における発明特定事項とはそれぞれ対応関係を有する。同様に、特許請求の範囲における発明特定事項と、これと同一名称を付した本技術の実施の形態における事項とはそれぞれ対応関係を有する。ただし、本技術は実施の形態に限定されるものではなく、その要旨を逸脱しない範囲において実施の形態に種々の変形を施すことにより具現化することができる。
なお、本明細書に記載された効果はあくまで例示であって、限定されるものではなく、また、他の効果があってもよい。
なお、本技術は以下のような構成もとることができる。
(1)半田により接続される半田濡れ層と、
チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、
前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。
(2)前記半田バリア層は、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含む前記(1)記載の発光デバイス。
(3)前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
前記(1)または(2)に記載の発光デバイス。
(4)シリコン基板に半田により接続される半田濡れ層と、
チタン層からなる密着層と、
コバルト、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。
(5)前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
前記(4)記載の発光デバイス。
(6)半田により接続される半田濡れ層と、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。
(7)半田により接続される半田濡れ層と、チタン層からなる密着層と、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。
(1)半田により接続される半田濡れ層と、
チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、
前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。
(2)前記半田バリア層は、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含む前記(1)記載の発光デバイス。
(3)前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
前記(1)または(2)に記載の発光デバイス。
(4)シリコン基板に半田により接続される半田濡れ層と、
チタン層からなる密着層と、
コバルト、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。
(5)前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
前記(4)記載の発光デバイス。
(6)半田により接続される半田濡れ層と、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。
(7)半田により接続される半田濡れ層と、チタン層からなる密着層と、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。
100 面発光レーザ装置
110 レーザチップ
111 エミッタアレイ
112 エミッタ
112A、112H コンタクト層
112B エッチングストップ層
112C、112G DBR層
112D、112F スペーサ層
112E 活性層
112i 電流狭窄層
112i―1 電流注入領域
112i―2 電流狭窄領域
112K リング電極層
112L 金属層
112L-1 接続電極
112L-2 反射メタル
112M 被酸化層
112x メサ部
113 基板
113A AR(Anti-reflection)層
114 半田バンプ
114-1 バリアメタル
115a、115b 絶縁膜
116 台座部
117、118 電極層
119 連結層
120 レーザドライバIC(Integrated Circuit)
122c 接続パッド
130 システムコントローラ
140 プリント配線基板
141 接続パッド 143 接合層
144 ボンディングワイヤ
200 距離測定装置
210、230 レンズ
220 受光装置
240 信号処理部
250 制御部
260 表示部
270 記憶部
300 被検体
410 半田濡れ層
420 半田バリア層
430 密着層
431 TiN層
432 Ti層
500 リフトオフレジスト
12030 車外情報検出ユニット
110 レーザチップ
111 エミッタアレイ
112 エミッタ
112A、112H コンタクト層
112B エッチングストップ層
112C、112G DBR層
112D、112F スペーサ層
112E 活性層
112i 電流狭窄層
112i―1 電流注入領域
112i―2 電流狭窄領域
112K リング電極層
112L 金属層
112L-1 接続電極
112L-2 反射メタル
112M 被酸化層
112x メサ部
113 基板
113A AR(Anti-reflection)層
114 半田バンプ
114-1 バリアメタル
115a、115b 絶縁膜
116 台座部
117、118 電極層
119 連結層
120 レーザドライバIC(Integrated Circuit)
122c 接続パッド
130 システムコントローラ
140 プリント配線基板
141 接続パッド 143 接合層
144 ボンディングワイヤ
200 距離測定装置
210、230 レンズ
220 受光装置
240 信号処理部
250 制御部
260 表示部
270 記憶部
300 被検体
410 半田濡れ層
420 半田バリア層
430 密着層
431 TiN層
432 Ti層
500 リフトオフレジスト
12030 車外情報検出ユニット
Claims (7)
- 半田により接続される半田濡れ層と、
チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、
前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。 - 前記半田バリア層は、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含む請求項1記載の発光デバイス。
- 前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
請求項1記載の発光デバイス。 - シリコン基板に半田により接続される半田濡れ層と、
チタン層からなる密着層と、
コバルト、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層と
を具備する発光デバイス。 - 前記半田濡れ層は、金、白金および銅のうち1つ以上を含む
請求項4記載の発光デバイス。 - 半田により接続される半田濡れ層と、チタン層および窒化チタン層からなる2層と窒化タンタル層との一方からなる密着層と、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。 - 半田により接続される半田濡れ層と、チタン層からなる密着層と、コバルト、白金、タンタルおよびタングステンのうち1つ以上を含み、前記半田濡れ層と前記密着層との間に形成される半田バリア層とを備える発光デバイスと、
前記発光デバイスが配列されるシリコン基板と
を具備するVoS(VCSEL on Silicon)デバイス。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280091778.0A CN118765470A (zh) | 2022-02-22 | 2022-12-27 | 发光器件以及VoS(硅上VCSEL)器件 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-025202 | 2022-02-22 | ||
| JP2022025202 | 2022-02-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023162463A1 true WO2023162463A1 (ja) | 2023-08-31 |
Family
ID=87765590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/048339 WO2023162463A1 (ja) | 2022-02-22 | 2022-12-27 | 発光デバイスおよびVoS(VCSEL on Silicon)デバイス |
Country Status (3)
| Country | Link |
|---|---|
| CN (1) | CN118765470A (ja) |
| TW (1) | TW202406255A (ja) |
| WO (1) | WO2023162463A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007300063A (ja) * | 2006-04-03 | 2007-11-15 | Toyoda Gosei Co Ltd | 半導体発光素子 |
| JP2009021430A (ja) * | 2007-07-12 | 2009-01-29 | Fuji Xerox Co Ltd | 面型光素子及び光モジュール |
| US20190089125A1 (en) * | 2016-03-03 | 2019-03-21 | Osram Opto Semiconductors Gmbh | Optoelectronic lighting device, carrier for an optoelectronic semiconductor chip, and optoelectronic lighting system |
| JP2020068330A (ja) * | 2018-10-25 | 2020-04-30 | 浜松ホトニクス株式会社 | 発光素子及び発光装置 |
| WO2021090670A1 (ja) | 2019-11-06 | 2021-05-14 | ソニーセミコンダクタソリューションズ株式会社 | 面発光レーザ装置 |
-
2022
- 2022-12-27 WO PCT/JP2022/048339 patent/WO2023162463A1/ja active Application Filing
- 2022-12-27 CN CN202280091778.0A patent/CN118765470A/zh active Pending
-
2023
- 2023-01-16 TW TW112101705A patent/TW202406255A/zh unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007300063A (ja) * | 2006-04-03 | 2007-11-15 | Toyoda Gosei Co Ltd | 半導体発光素子 |
| JP2009021430A (ja) * | 2007-07-12 | 2009-01-29 | Fuji Xerox Co Ltd | 面型光素子及び光モジュール |
| US20190089125A1 (en) * | 2016-03-03 | 2019-03-21 | Osram Opto Semiconductors Gmbh | Optoelectronic lighting device, carrier for an optoelectronic semiconductor chip, and optoelectronic lighting system |
| JP2020068330A (ja) * | 2018-10-25 | 2020-04-30 | 浜松ホトニクス株式会社 | 発光素子及び発光装置 |
| WO2021090670A1 (ja) | 2019-11-06 | 2021-05-14 | ソニーセミコンダクタソリューションズ株式会社 | 面発光レーザ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202406255A (zh) | 2024-02-01 |
| CN118765470A (zh) | 2024-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20220247153A1 (en) | Surface light-emission laser device | |
| US20240055833A1 (en) | Surface emitting laser, electronic device, and method for manufacturing surface emitting laser | |
| WO2022239330A1 (ja) | 面発光レーザ、面発光レーザアレイ及び電子機器 | |
| WO2023162463A1 (ja) | 発光デバイスおよびVoS(VCSEL on Silicon)デバイス | |
| US20240235167A1 (en) | Surface emitting laser element, electronic device, and method for manufacturing surface emitting laser element | |
| WO2021220879A1 (ja) | 発光素子アレイ及び発光素子アレイの製造方法 | |
| US20230283048A1 (en) | Surface emitting laser apparatus, electronic device, and method for manufacturing surface emitting laser apparatus | |
| WO2022054411A1 (ja) | 面発光レーザ装置、電子機器及び面発光レーザ装置の製造方法 | |
| WO2023067890A1 (ja) | 面発光レーザ及び面発光レーザの製造方法 | |
| WO2023032307A1 (ja) | 発光素子アレイおよび発光素子アレイの製造方法 | |
| WO2022201772A1 (ja) | 面発光レーザ、光源装置、電子機器及び面発光レーザの製造方法 | |
| WO2023181658A1 (ja) | 面発光レーザ、光源装置及び電子機器 | |
| WO2022158312A1 (ja) | 面発光レーザ | |
| WO2022185765A1 (ja) | 面発光レーザ及び電子機器 | |
| EP4266356A1 (en) | Surface-emitting laser device | |
| WO2024038686A1 (ja) | 発光装置 | |
| WO2023149087A1 (ja) | 面発光レーザ、面発光レーザアレイ及び光源装置 | |
| WO2023233850A1 (ja) | 面発光素子 | |
| WO2023233818A1 (ja) | 面発光素子 | |
| WO2024135157A1 (ja) | 面発光レーザ装置、電子機器及び面発光レーザ装置の製造方法 | |
| WO2023171148A1 (ja) | 面発光レーザ、面発光レーザアレイ及び面発光レーザの製造方法 | |
| WO2024161986A1 (ja) | 光源装置 | |
| WO2023162488A1 (ja) | 面発光レーザ、光源装置及び測距装置 | |
| WO2024014140A1 (ja) | 面発光レーザ及び面発光レーザの製造方法 | |
| WO2024122178A1 (en) | Optical apparatus and method for manufacturing optical apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22928978 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024502876 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022928978 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2022928978 Country of ref document: EP Effective date: 20240923 |